Embed Size (px)
Citation preview

RENA Environmental Recovery Monitoring Programme 397 | P a g e
Project 2e - Understanding the role of estuarine-shelf
exchange in controlling the hydrodynamic dispersal
and mixing of oil Hannah Jones, Karin Bryan, Julia C. Mullarney, Willem De Lange
Executive summary
Oil-spill dispersal over the month following the Rena grounding was hindcast using a combination of
hydrodynamic and oil-dispersal modelling. Tidally-driven currents were modelled on the Bay of
Plenty shelf and in Tauranga Harbour using three-dimensional hydrodynamic models Delft3D and
ELCOM, respectively. Hydrodynamics were calibrated and verified using observations from the Bay
of Plenty Regional Council, the Port of Tauranga and past studies by the University of Waikato.
Water level was well predicted by both models (with a mean absolute error of 0.08 m) and currents
were predicted well within the Harbour and less well on the shelf. The modelled currents were used
as forcing for the NOAA oil-spill model GNOME, along with observed wind speed and direction
collected at the Tauranga Airport meteorological station.
Oil was predicted to reach the shoreline on October 13th (8 days after the grounding), which was
consistent with SCAT surveys. Hot spots of oil accumulation occurred on the northwest side of
islands and headlands, as the oil dispersed southward along the coast, also consistent with SCAT
surveys. Hot spots of oil were also predicted along the open coast beaches, but were not very well
aligned with observations, which could be because the surf-zone and rip-current circulation was not
represented in this implementation of the model. Accumulation of oil was also predicted around Mt
Maunganui, which was caused by eddies forming on the tidal jet depositing oil onto the headland.
Within the Harbour, the highest accumulation of oil was predicted in Pilot Bay, which was caused by
the anti-clockwise eddy inside the harbour. These predictions were qualitatively supported by
observations from the SCAT surveys.
Model predictions were sensitive to assumptions about the timing and volume of oil released during
the grounding, which was difficult to measure with any accuracy. The dispersal of oil (both observed
and modelled) is highly dependent on the prevailing wind patterns, and more accurate prediction of
oil dispersal and accumulation would require better observations of local wind patterns.
Nevertheless, the qualitative comparison of predictions with observations indicated that the GNOME
modelling approach was an effective low-cost tool. Moreover, Delft3D and GNOME are both open
source and freely available software packages.

RENA Environmental Recovery Monitoring Programme 398 | P a g e
1. Introduction
On the 5th of October, 2011, the 47,000 tonne container ship “Rena” ran aground on the Astrolabe
Reef on the approach to Tauranga Harbour. There were 1,733 tonnes of oil on board the Rena, of
which 1,300 tonnes have been recovered as of May 4th 2012 (source: Maritime NZ). During the
week after the grounding, 350 tonnes of heavy (Bunker C) fuel oil were released onto the shelf,
where the oil was subjected to tidal currents, wind-induced currents, and shelf currents, which both
advected and dispersed the oil, with a large fraction stranded on Waihi Beach, Matakana Island,
Mount Maunganui Beach, Pāpāmoa Beach, and lesser amounts being dispersed farther afield. A
small fraction entered Tauranga Harbour and Maketū Estuary. A key characteristic of the oil
accumulation that was found was that it was not evenly dispersed, but rather oil was concentrated
in “hot spots” by the hydrodynamic processes.
One of the tools that we use to assess the potential extent of a spill is numerical oil spill modelling.
This approach allows mobilisation of response teams and clean-up equipment at the right spatial
scale to match the scale of the problem. A number of institutions provided oil-spill response forecast
modelling immediately following the grounding, led mainly by MetOcean Solutions, followed by
NIWA and ASR Ltd. Such models have two components, a hydrodynamic driver and a particle
tracking model (potentially with some ability to model oil decomposition during transport). These
models can provide widely varying predictions depending on how the wind and coastal currents are
incorporated; areas around the mouths of estuaries, where estuarine water interacts with the shelf,
are particularly hard to model. Although it is relatively straightforward to provide a quick prediction
of dispersal, to provide a correct prediction requires careful calibration and verification against
observations. Ideally, a portion of the groundwork should be undertaken in advance of a spill, as part
of a hazard management programme. Given that the Port of Tauranga operations are highly-
successful, and likely to continue to grow, some of the Rena recovery plan should be focussed
toward a better oil spill hazard management plan for the region, underpinned by verified
hydrodynamic modelling.
Study Aim and Objectives
The aim of this work is to undertake dispersal modelling of the area stretching from the northern
end of Matakana Island to the entrance of the Maketū harbour, and including the southern basin of
Tauranga Harbour and the Maketū Estuary, and to verify the results against information on oil
recovery collected by Maritime New Zealand.
This aim is divided into 4 sub-objectives:
� Work with summer student from the “Debris Dispersal Modelling Proposal (PI: de Lange,
hereafter caller ‘the Debris Project’)” to collect and collate measures of oil accumulation
into a spatial map, in collaboration with Maritime New Zealand and other parties that
were instrumental in the clean-up operation.
� Undertake shelf dispersal modelling, and compare the results against patterns of coastal
accumulation. Investigate the processes responsible for “hot spots” of accumulation.
� Undertake estuarine dispersal modelling using an entrance point source, and compare
against patterns of estuarine accumulation.
� Assist the MSc student from the Debris Project to run a number of scenarios to see how
generalizable the results from the Rena grounding would be to a grounding in the
vicinity of the main navigation channel.
This report summarises the oil spill mapping and the dispersal modelling. The MSc project, which will
investigate scenarios, has just started and is due for completion in 2015, when the student finishes
their thesis.

RENA Environmental Recovery Monitoring Programme 399 | P a g e
2. Methods
Hydrodynamic models were used to simulate currents on the open coast (shelf) and inside Tauranga
Harbour. The shelf modelling was undertaken using Delft3D and the estuarine modelling using
ELCOM. The output from these models was then used as forcing in a particle tracking model
(GNOME) to simulate oil dispersal following the Rena grounding. Maps of simulated coastal oil
accumulation produced by GNOME were compared to a verification database, which was produced
using data on observed oil accumulation provided by Maritime NZ and collated by Laura Hines
(summer student from the Debris Project).
2.1 Study area
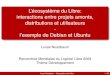
The container vessel Rena ran aground on Astrolabe reef (c. 7 km north of Mōtītī Island, and c. 24
km northeast of Mt. Maunganui) on approach to the Port of Tauranga on 5th October 2011 (Figure
1). Approximately 350 tonnes of heavy fuel oil leaked from the vessel over the following days and
weeks, a portion of which was deposited on Mōtītī Island, Matakana Island and on the coastline
between Mt. Maunganui and Maketū Estuary. A small amount of oil entered Tauranga Harbour and
Maketū Estuary (Maritime NZ, 2011). The Bay of Plenty coastline is a low-energy wave environment,
sheltered from the prevailing westerly and south-westerly swell that affects other areas of New
Zealand (Heath, 1985). Tides (at Tauranga) range between 1.62 m for spring tides and 1.24 m for
neap tides, and tidal currents on the shelf are typically stronger than any other flow component
(Heath 1985).
Figure 1: Western Bay of Plenty coastline. The site of the Rena grounding (Astrolabe reef) is marked with a red star.
k
176°40'0"E176°30'0"E176°20'0"E176°10'0"E176°0'0"E
37°2
0'0"
S37
°30'
0"S
37°4
0'0"
S37
°50'
0"S
±
0 5 10 15 202.5Kilometers
Motiti Island
Mayor Island
Mt. Maunganui
Papamoa
Maketu
Tauranga
Matakana Island
Waihi Beach
Astrolabe reef
Pukehina

RENA Environmental Recovery Monitoring Programme 400 | P a g e
2.2 ELCOM
2.2.1 ELCOM model description and set-up
ELCOM (Estuary, Lake and Coastal Ocean Model) is a three-dimensional hydrodynamic model used
to simulate velocity, temperature and salinity distribution in water bodies. ELCOM has been
developed by the Centre for Water Research at the University of Western Australia, and is based on
the unsteady, viscous Navier-Stokes equations for incompressible flow (Hodges and Dallimore 2011).
In this study, ELCOM was run with a 30 second time step between 1st October 2011 and 31st October
2011. This simulation includes the period of time during which most of the oil was lost from Rena,
and was observed to strand on beaches or enter the estuary (MaritimeNZ 2011). As the simulation
began from a cold start (i.e. flat water level and no currents) there were 4 days of model “spin up”
time before the Rena grounding on the 5th October 2011, when results were extracted for use in the
particle tracking model (GNOME).
The ELCOM model set-up used in this study, along with extensive calibration and validation, is
described in detail in Tay et al. (in press.). The ELCOM bathymetric grid (75 x 75 m resolution) was
constructed from a number of sources, including University of Waikato echo-sounder surveys, Port
of Tauranga hydrographic soundings, and navy fairsheets (Figure 2). The ELCOM model domain
includes the southern basin of Tauranga Harbour, an area of c. 95 x 106 m2 at mean sea level.
Although the southern basin is connected to the northern basin of the harbour, there is little or no
exchange of water between them (Tay et al. in press. and references therein). ELCOM model vertical
layer thickness (n = 12) varied between 0.5 m at the surface to 5 m at the seabed.
Figure 2: Bathymetry grid for Tauranga Harbour ELCOM model including the location of water level recorders and ADCP.
Water levels along the open ocean boundaries (outside the southern entrance) were derived from
NIWA’s tidal model (http://www.niwa.co.nz/services/online-services/tide-forecaster). Water
temperature for the open boundaries was derived from measured water temperature from Bay of
Plenty Regional Council’s wave buoy, which is 13 km offshore (37.411°S, 176.371°E). Salinities for the
open boundaries were derived from offshore transect data collected in October 2003, assuming that
offshore salinity was the same in October 2003 as in October 2011. Freshwater inflows into the
harbour are the Wairoa River, Waipapa River, Waimapu Stream, Kopurereroa Stream, Te Puna
Stream, Wainui River and Aongatete River, which were prescribed using BoPRC continuous flow data
(where available) and design hydrographs. Hourly meteorological data (i.e. rainfall, wind speed and
direction, solar radiation, air temperature, relative humidity and cloud cover) for Tauranga airport
were acquired from NIWA’s Cliflo service (National Institute of Water and Atmospheric Research
National Climate database, http://cliflow.niwa.co.nz).

RENA Environmental Recovery Monitoring Programme 401 | P a g e
2.2.2 ELCOM validation
The ELCOM model has already been calibrated and subject to extensive validation (Tay et al. in
press.). However, as a further validation exercise, data were extracted from model output for
comparison with field data collected in, and outside, the harbour. Continuous measurements of tidal
elevation were provided by BOPRC and Port of Tauranga for three stations inside the harbour
(Ōmokoroa, Sulphur Point and Tug Berth) and by Port of Tauranga for one station outside of the
harbour (A Beacon). ADCP current meter data collected in the harbour entrance were also provided
by Port of Tauranga. The model error was represented by model performance statistics; the
coefficient of determination (R2) and the mean absolute error (MAE).
2.3 Delft3D
2.3.1 Delft3D model description and set-up
Delft3D-FLOW, developed by Deltares (The Netherlands), is a hydrodynamic simulation programme
that calculates non-steady flow from tidal and meteorological forcing on a rectilinear or curvilinear
boundary fitted grid. Delft3D-FLOW may be implemented in 3D, with the vertical grid defined using
the sigma (σ) co-ordinate approach, or in 2D using a depth-averaged approach (2DH) (Deltares,
2011). The model has been extensively validated (e.g. Elias et al. 2000; Lesser et al. 2004).
In this study, the Delft3D model domain includes both the northern and southern basins of Tauranga
harbour. The grid extends c. 25 km offshore (to a water depth of around 70 – 90 m) and c. 61 km
along shore from Waihi to Maketū. The grid resolution is 200 x 200 m in the horizontal and the grid
is rotated at an angle of 50° to the North-South axis (Figure 3). Bathymetry was derived from various
sources, such as echo-soundings and nautical charts (Kwoll, 2010). Preliminary simulations indicated
improved simulation of surface velocities with a 3D model, compared to a depth-averaged model.
The number and thickness of the layers in the 3D model was determined based on the need for fine
resolution near the bed (to resolve the logarithmic profile of the horizontal velocity components in
the vertical) and near the surface. Based on these considerations (and the need for the layer
thickness to have a smooth distribution) the 3D model has 16 σ-layers, with layers thicknesses (bed)
1.5, 2, 2.8, 4, 5.6, 7.8, 11, 15.3, 15.3, 11, 7.8, 5.6, 4, 2.8, 2, and 1.5 (surface) % of total depth.
Figure 3: Bathymetry grid for Delft model. Open boundaries indicated with solid black line.

RENA Environmental Recovery Monitoring Programme 402 | P a g e
Hydrodynamic simulations using the Delft3D was forced at the open boundaries using the tidal
constituents M2, N2, S2, K1, MU2, O1, and L2. Time series of water levels at the four corners of the
open boundaries were derived from the NIWA tidal model (http://www.niwa.co.nz/services/online-
services/tide-forecaster). The tidal constituents were extracted from the water levels using the tidal
harmonic analysis package, “t_tide” (Pawlowicz et al. 2002). Preliminary simulations with the open
boundaries forced by water levels were found to produce instabilities (eddies and areas of very high
flow) caused by reflections at the boundaries. To overcome this, the flow was forced using
astronomic Riemann boundary conditions for all tidal constituents at the open boundaries. Riemann
boundary conditions are based on a linearised Riemann invariant:
�� = � + �� , (Units m s-1)
where, U is velocity, η is sea surface elevation, g is acceleration due to gravity, and h is water depth.
This type of boundary reduces reflection of obliquely incident waves and is non-reflective for
outgoing waves normal to the boundary (e.g. Mullarney et al. 2008). Free slip (no shear stress)
conditions were applied at the closed boundaries, and the vertical velocity profile at the boundaries
was a logarithmic function of the water depth. Wind forcing was not applied to the Delft3D
hydrodynamic model as wind forcing was applied in the particle tracking model, GNOME.
2.3.2 Delft3D calibration
The simulation began on 1st October 2011 from a “cold start” (i.e. uniform water levels, no currents)
and ran for 30 days with a 60 s time step. To reduce numerical instabilities in the initial adjustment
period, the boundary forcing was gradually applied over a smoothing period of 60 min. The model
was calibrated using water level and current data provided by BOPRC and Port of Tauranga (i.e. sites
at A Beacon, Sulphur Point, Tug Berth, Ōmokoroa and the harbour entrance ADCP) by adjusting the
roughness coefficient, threshold depth, and horizontal eddy viscosity.
Preliminary simulations with a 2DH model were used to estimate the Chézy coefficient for the 3D
model. In the 2DH model the shear stress at the bed is assumed to be given by a quadratic friction
law,
�� = ������ ,
where U is the magnitude of the depth-averaged horizontal velocity and C2D is the 2D-Chézy
coefficient (m ½ s-1). In Delft3D the Chézy coefficient can be prescribed as a uniform or spatially
varying value or determined using a Manning’s or White Colebrook’s formulation (Deltares, 2012).
In the 3D model a quadratic bed stress formulation using the velocity just above the bed is used to
calculate shear stress,
�� =�����
���� ,
where ub is the magnitude of the horizontal velocity in the first layer above the bed and C3D is the 3D-
Chézy coefficient (m ½ s-1). This formulation assumes that the first grid point above the bed is within
the logarithmic boundary layer. Thus, the vertical layer structure must be configured to allow
simulation of a log layer. The 3D-Chézy coefficient can be estimated from the 2D-Chézy coefficient,
firstly by conversion of C2D to the bed roughness length (z0).
�� = � × �� !− #+$��� × %√'(),

RENA Environmental Recovery Monitoring Programme 403 | P a g e
where H is the total water depth (m), k is the von Karman constant (0.41) and C2D is the 2D-Chézy
coefficient (m ½ s-1). Then, the 3D-Chézy coefficient (C3D) can be calculated from z0 (bed roughness
length) as
��� =√% × ln $1 +�..×/012 ' ,
where σb is the depth of the computational layer at the bed and k is the von Karman constant.
As with the ELCOM model, Delft3D model performance was statistically assessed.
2.3.3 Delft3D validation
Parameters resulting from the Delft3D model calibration were fixed for a further month-long
simulation for the purposes of model validation. Water level and current data collected at five sites
inside and outside the harbour between 10th May and 10th June 2006, described in detail in Spiers et
al. (2009), were used for model validation. Briefly, tidal elevation, current velocity and direction
were measured at three sites outside (C1, C2 and C3) and one site inside (C5) Tauranga Harbour.
Station C4 was not used as it was found to contain erroneous data (Spiers et al. 2009). C1 was at 27
m water depth, outside of the influence of the ebb jet, C2 was at 11 m water depth in the pathway
of the ebb jet and C3 was at 6 m water depth on the ebb-tidal delta. C5 was inside the harbour, in
the western channel, at 9m water depth (Figure 4).
Figure 4: Map of current meter locations taken from Spiers et al., 2009.

RENA Environmental Recovery Monitoring Programme 404 | P a g e
2.4 GNOME
2.4.1 GNOME model description and setup
GNOME (General NOAA Oil Modeling Environment) is an oil spill trajectory model that simulates the
movement of oil due to winds, currents and spreading (NOAA 2012). GNOME is freely available and
may be run in “standard mode”, an automated mode used for spill planning, and “diagnostic mode”,
designed to accurately model real spills. In standard mode GNOME uses “location files” (pre-
packaged tide and current data) to estimate the trajectory of spills. The spill trajectory includes both
a “best guess” and a “minimum regret” solution that takes into account the uncertainty in the model
inputs. Location files are not available for the Bay of Plenty coastline, and the aim of this study was
to model oil dispersal after the Rena grounding in October 2011, requiring GNOME to be run in
diagnostic mode. Diagnostic mode requires input for shoreline and hydrodynamic information, and
has additional capabilities compared to standard mode, such as control over the degree of
uncertainty used in the minimum regret estimates.
GNOME is a two-dimensional Eulerian/Lagrangian model that requires three major inputs, maps,
movers (current, wind or diffusion) and spills. For this study, output from the hydrodynamic models,
ELCOM and Delft3D, was used as input in GNOME as a current mover. Currently, GNOME can only
use 2D currents (although NOAA is planning on adding capability to use 3D output from
hydrodynamic models). Therefore, surface flows from the ELCOM and Delft3D models were used as
input to GNOME.
2.4.1 Map files
Maps were downloaded for Western Bay of Plenty coastline from the GOODS’ (GNOME Online
Oceanographic Data Server) map generator tool (http://gnome.orr.noaa.gov/goods). This tool
produces shoreline data in a boundary file atlas (BNA) format. BNA maps use vector shorelines which
are rasterized by GNOME into a land and water bitmap in order to track the oil beaching (NOAA
2012).
2.4.2 Movers
Movers in GNOME include currents, wind and diffusion. The movement of the oil is calculated from
the u (east-west) and v (north-south) velocity components, summed for all the movers at each time
step, using a 1st-order Runge-Kutta method. Decreasing the model time step (default is 15 minutes)
may provide accuracy comparable to that using a more complex higher-order method (NOAA 2012).
GNOME accepts various grids and formats for current data. For this study, the hydrodynamic model
(ELCOM and Delft3D) data were extracted and written to NetCDF files for importing into GNOME.
Although both the ELCOM and Delft models use a rectangular grid, the rotation of the Delft grid
caused problems when trying to load Delft currents into GNOME. To overcome this, Delft currents
were loaded as a curvilinear grid, which required that a land mask was also defined in the NetCDF
file.
GNOME allows for wind movers to be defined as constant, time-dependent or time and space
dependent. Time-dependent wind data were available for the simulation period for Tauranga
airport. These data were loaded directly into GNOME for simulations using currents derived from
Delft3D (i.e. for the shelf) and applied spatially uniformly over the entire domain. For simulations
using currents from the harbour model ELCOM (which is forced by tides, freshwater inflows and
meteorological data) the wind mover was not activated in GNOME.
GNOME calculates diffusion of the oil (random spreading) using a simple random walk based on a
diffusion value set in the model. The diffusion value represents the horizontal eddy diffusivity in the
water, which can range from c. 0.1 m2 s-1 to 100 m2 s-1. When GNOME is used in forecast mode this

RENA Environmental Recovery Monitoring Programme 405 | P a g e
value can be adjusted based on over-flight data. In this study, the diffusion value was adjusted
within the ranges defined above to improve model accuracy when compared with maps of observed
coastal oil accumulation (see Section 0).
2.4.3 Spills
Oil spills in GNOME can be modelled as up to 10,000 lagrangian elements (LEs), each of which have
parameters assigned including location, release time, age, pollutant type, and status. The status of
each LE may be floating, beached, evaporated or off the map, and a mass balance summary provided
in GNOME shows the proportion of the total spill in each category throughout the simulation.
In this study, the Rena spill was initialised using data from Maritime NZ that described the timing and
amount of oil spilt from the vessel. The Rena grounded on Astrolabe reef (37.540°S 176.425°E) at
2:00 am on 5th October 2011, and approximately 350 tonnes of oil leaked from the ship (typically at
low tide) between then and late October. The majority of the oil likely leaked from the vessel
between 10th and 12th October, when weather conditions were poor (winds speeds typically 5 – 8 m
s-1, with north to north-easterly direction).
2.4.4 GNOME calibration
There are a number of parameters relating to processes such as diffusion, windage or uncertainty in
the input data, which may be adjusted during GNOME model calibration. When run in forecast
mode, GNOME input data should be constantly updated and the model re-run and re-calibrated at
least once a day (NOAA, 2012). When running GNOME in hindcast mode (as in this study) there may
be more certainty related to the input data (which is based on measured data, such as wind, or
calibrated hydrodynamic models), compared to, for example, wind forecasts. However, model
parameters must still be calibrated using observed data.
GNOME simulations for Tauranga Harbour (i.e. using ELCOM model output) and the shelf (i.e. using
Delft3D model output) began on 5th October 2011 (when the Rena grounded and oil was first
observed to be leaking from the ship). The model was calibrated using maps depicting oil observed
in the water and on the shoreline by adjusting the diffusion, windage, refloat half-life and model
time step.
Diffusion in GNOME has been described above in Section 0. Windage is the movement of oil by the
wind, which is typically about 3% of the wind speed (NOAA, 2012). The default value in GNOME is a
random value taken from between 1% and 4%, with a default persistence (the amount of time
before the random value is reset) of 15 minutes. Refloating in GNOME is determined by the refloat
half-life, which is defined as the number of hours in which half of the oil that has beached is
removed by an offshore wind, diffusion or raised water levels (such as an incoming tide). The
adhesiveness of oil to a shoreline is dependent on factors such as oil type, sediment porosity, and
the type, and density of vegetation.
Additional parameters describe uncertainty in the wind, current and diffusion movers, and thus
control the output for the minimum regret LEs. For wind, parameters are used to describe how
much the wind speed and direction are likely to be in error. For currents, parameters describe the
percentage of current velocity the uncertainty spans for both the north-south and east-west current
directions.
Output from the GNOME shelf model was used (when verified with information from Maritime NZ)
to describe an entrance point source for Tauranga Harbour GNOME simulations for the harbour used
ELCOM model output as a current mover, and results were compared with maps of oil accumulation
in the estuary.

RENA Environmental Recovery Monitoring Programme 406 | P a g e
2.4.5 Verification of GNOME output with observed data
Data on oil dispersal and accumulation following the Rena grounding was obtained from Maritime
New Zealand in the form of SCAT (Shore Clean-up Assessment Techniques) survey reports and over-
flight observations. Data were extracted and compiled to summarise critical information (where
available), such as the survey/oil location, the beach zone surveyed (e.g., lower, middle, or upper
intertidal), the amount of oil observed (e.g., as percentage cover on the shoreline), and oil character
(e.g., tar balls, tar patties).
From the SCAT data, two metrics were calculated for each day in October following the grounding: i)
the average oil percentage cover (averaged across the intertidal zones for each location surveyed
and averaged across all locations surveyed) and ii) the maximum oil percentage cover. Data on the
quantity of oil removed from the beaches was insufficient to estimate the actual amount (in tonnes)
of oil accumulated on the shoreline, thus it was not possible to quantitatively compare GNOME
output (tonnes of oil accumulated on the shoreline) with SCAT data (percentage cover of oil on the
shoreline). However, GNOME output and SCAT data were compared to assess model accuracy with
respect to the timing and location of oil accumulation.
Several maps of oil dispersal (in the water) and accumulation (on the shoreline) were also provided
by Maritime NZ that summarised the SCAT and over-flight observations. These maps were compared
with GNOME model output.

RENA Environmental Recovery Monitoring Programme 407 | P a g e
3. Results and discussion
3.1 ELCOM
3.1.1. ELCOM modelled water level and tidal variations
The Tauranga Harbour ELCOM model had already been subject to extensive calibration and
validation (Tay et al. in press.), and we used the calibrated model parameters obtained in their
study. For the period 1st October – 31st October 2011 modelled and measured water levels for the
four stations (A Beacon, Tug Berth, Sulphur Point and Ōmokoroa) were in good agreement (R2
between 0.95 – 0.98 and MAE between 0.07 – 0.09 m for all locations;table 23). Time series
comparisons of measured and modelled water levels for 5 days are provided in Figure 5.
Tidal constituents were extracted from the modelled and measured water levels using a freeware
tidal harmonic analysis package, “t_tide” (Pawlowicz et al. 2002). The M2 tide dominated both the
modelled and measured tides (c. 0.7 m), with the N2, S2 and K1 tides contributing c. 0.15, 0.10 and
0.05 m to the remaining signal, respectively. Hence, the ELCOM model predicted tidal amplitudes
well. The M2 tide was slightly under-predicted, by between c. 0.02 and 0.08 m, the N2 and S2 tides
were under-predicted by up to 0.04 m, and the K1 tide was over-predicted by 0.01 m (table 2). The
model predicted phases well (i.e. within 3 degrees) for the M2 tide at all sites. The model tended to
overpredict the phase of the N2 and S2 tides near the harbour entrance (by between 3 and 10
degrees), and for the K1 and O1 tides the model tended to under-predict the phase (by c. 10
degrees) in the inner harbour (i.e. at Ōmokoroa).
Table 1: Statistical comparison of measured and ELCOM modelled water levels. R2 is the coefficient of determination and MAE is the mean
absolute error.
Water levels
Site R2 MAE (m)
A Beacon 0.983 0.075
Tug Berth 0.977 0.074
Sulphur Point 0.978 0.083
Ōmokoroa 0.954 0.094
Table 2: Statistical comparison of measured and ELCOM modelled tidal amplitude and phase.
Tidal constituents
Site M2
amp
error
(m)
M2
phase
error
(deg)
N2
amp
error
(m)
N2
phase
error
(deg)
S2
amp
error
(m)
S2
phase
error
(deg)
K1
amp
error
(m)
K1
phase
error
(deg)
O1
amp
error
(m)
O1
phase
error
(deg)
A Beacon -0.02 -1.16 0.03 6.03 -0.02 5.09 0.02 7.02 0.00 -0.29
Tug Berth -0.02 2.92 0.03 10.06 -0.02 11.58 0.02 8.37 0.00 4.35
Sulphur Point -0.06 3.23 0.01 9.08 -0.01 7.79 0.02 -8.07 0.01 -4.07
Ōmokoroa -0.08 -2.28 -0.01 0.82 -0.01 0.24 0.00 -11.21 0.01 -15.70

RENA Environmental Recovery Monitoring Programme 408 | P a g e
Figure 5: Measured and modelled (ELCOM) water levels for sites inside (Tug Berth, Sulphur Point and Ōmokoroa) and outside (A Beacon)
Tauranga Harbour.
3.1.2 ELCOM modelled currents
Measured current velocities from the Port of Tauranga ADCP were depth-averaged from 0.5 to 7 m
depth (Lance Wood, pers. comm.) and so are not directly comparable to either the surface or depth-
averaged ELCOM output (as the total depth at the ADCP site is approximately 18m). Unsurprisingly
therefore, the depth-averaged modelled velocities were consistently lower than the measured
velocities (mean measured 1.1 m s-1, mean modelled 0.7 m s-1, MAE 0.43 m s-1). However, peak tidal
velocities (depth-averaged) for the harbour entrance have been reported previously to be 1.8 m s-1
in Vennell (2006) and 1.7 m s-1 in Spiers et al. (2009), which compares well with the peak velocity in
the depth-averaged model output (1.6 m s-1).
The ELCOM surface sheet velocities were in better agreement with the ADCP velocities (mean
measured 1.1 m s-1, mean modelled 1.24 m s-1, MAE 0.20 m s-1), although velocities were sometimes
over-predicted by the model (by c. 0.2 m s-1; table 3, figure 6). The peak velocity from ELCOM surface
output was 2.7 m s-1, which is slightly greater than the peak measured velocity of 2.5 m s-1.
Modelled current directions compared well with measured data from the Port of Tauranga ADCP,
with better agreement between measured and modelled data on the flood tide (MAE 16 degrees) ,
than on the ebb (MAE 37 degrees) (Table 4, Figure 7). The model also captured the high ebb tide
velocities, compared to the flood (1.48 m s-1 at the ebb cf. 1.10 m s-1 at the flood, for the measured
data, and 1.54 m s-1 at the ebb cf. 1.16 m s-1 at the flood, for the model).
05/10 06/10 07/10 08/10 09/10 10/10-1
-0.5
0
0.5
1A Beacon
Wat
er le
vel (
m)
Date
Measured water levelModelled (ELCOM) water level
05/10 06/10 07/10 08/10 09/10 10/10-1
-0.5
0
0.5
1Tug Berth
Wat
er le
vel (
m)
Date
05/10 06/10 07/10 08/10 09/10 10/10-1
-0.5
0
0.5
1Sulphur Point
Wat
er le
vel (
m)
Date05/10 06/10 07/10 08/10 09/10 10/10-1
-0.5
0
0.5
1Omokoroa
Wat
er le
vel (
m)
Date

RENA Environmental Recovery Monitoring Programme 409 | P a g e
Table 3: Statistical comparison of measured and modelled (ELCOM) current velocities at Port of Tauranga ADCP site. R2 is the coefficient of
determination, MAE is the mean absolute error, Meanobs is the mean of the ADCP measurements, Meanmod is the mean of the model
output.
Current velocity
R2 MAE (m s
-1) Meanobs (m s
-1) Meanmod (m s
-1)
ELCOM (depth-averaged) 0.91 0.43 1.1 0.7
ELCOM (surface) 0.87 0.20 1.1 1.24
Figure 6: Measured and modelled (ELCOM depth averaged and surface) current velocity at the harbour entrance (Port of Tauranga ADCP
site).
Figure 7: Measured (blue circles) and modelled (ELCOM surface; red circles) current velocity (m s
-1) and direction (degrees) at the harbour
entrance.
05/10 06/10 07/10 08/10 09/10 10/100
0.5
1
1.5
2
2.5V
eloc
ity (m
/s)
Date
Measured VelocityModelled (ELCOM-depth averaged) VelocityModelled (ELCOM-surface) Velocity

RENA Environmental Recovery Monitoring Programme 410 | P a g e
Table 4: Statistical comparison of measured and modelled (ELCOM surface) current speed and direction at Port of Tauranga ADCP site.
MAE is the mean absolute error, Meanobs is the mean of the measurements and Meanmod is the mean of the model output.
Speed (m s-1
) Direction (degrees)
Meanobs Meanmod MAE Meanobs Meanmod MAE
Total 1.10 1.24 0.20 - - 26.70
Flood 1.10 1.16 0.17 145.77 161.66 16.19
Ebb 1.48 1.54 0.21 8.00 330.72 37.12
3.2 Delft3D
3.2.1 Delft modelled water level and tidal variations
The Delft3D model was calibrated by adjusting the bottom roughness coefficient, threshold depth,
and horizontal eddy viscosity. Final calibrated parameters are detailed in table 5.
Estimation of the 3D-Chézy coefficient from the 2DH-Chézy coefficient did not result in good
agreement between measured and modelled data, requiring further 3D model calibration. The final
calibrated 3D-Chézy coefficient was spatially variable, ranging from 80 m1/2 s-1 (shallow water) to 40
m1/2 s-1 (deep water), corresponding to a roughness length (z0) that increased with depth from c.
0.0001 m to 0.002 m. These values of z0 are consistent with those provided in the literature, for un-
rippled mud/sand and rippled sand (e.g. Soulsby 1997).
Table 5: Calibrated model parameters for the Delft3D model.
Parameter Value Units
Threshold depth 0.02 m
Horizontal eddy viscosity 1 m2 s
-1
Vertical eddy viscosity 0 m2 s
-1
Turbulence model k-ε
Number of layers 16
Thickness of layers 1.5, 2, 2.8, 4, 5.6, 7.8, 11, 15.3, 15.3, 11, 7.8, 5.6, 4, 2.8, 2, 1.5 %
Chézy roughness coefficient Spatially variable (80 – 40) m1/2
s-1
The Delft3D modelled and measured water levels for the four stations used in model calibration (A
Beacon, Tug Berth, Sulphur Point and Ōmokoroa) were in good agreement (R2 0.97 – 0.98, MAE 0.07
– 0.08 m). Model performance for the validation period (R2 0.96 – 0.97, MAE 0.07 – 0.08 m), was
similar to that achieved for the calibration period (Table 6). Time series comparisons of measured
and modelled water levels are provided in Figure 8 and Figure 9.
For the calibration period, the Delft3D model predicted tidal amplitudes to within 0.03 m and
predicted tidal phases for the major tidal constituents (M2, N2 and S2) at sites outside the harbour
and near the harbour entrance to within c. 5 degrees. However, the model tended to under-predict
the phase in the inner harbour (i.e. at Ōmokoroa) by c. 6 - 7 degrees ( table 6).

RENA Environmental Recovery Monitoring Programme 411 | P a g e
Table 6 This discrepancy may be partly owing to the location of the Ōmokoroa water level recorder
in a small channel that is not well represented in the Delft3D model bathymetry.
For the validation period, the Delft3D model predicted tidal amplitudes to within 0.04 m and tidal
phases for the major tidal constituents to within c. 5 degrees (i.e. similar performance to the
calibration period; table 6).

RENA Environmental Recovery Monitoring Programme 412 | P a g e
Table 6: Statistical comparison of measured and Delft3D modelled water levels. R2 is the coefficient of determination, and MAE is the
mean absolute error.
Model performance statistics for water levels
Model and site Calibration or Validation R2 MAE (m)
A Beacon Calibration 0.982 0.072
Tug Berth Calibration 0.971 0.078
Sulphur Point Calibration 0.974 0.082
Ōmokoroa Calibration 0.965 0.082
C1 Validation 0.968 0.077
C2 Validation 0.965 0.078
C3 Validation 0.965 0.077
C5 Validation 0.958 0.082
Table 7: Statistical comparison of measured and Delft3D modelled tidal amplitude and phase.
Tidal constituents
Model and
site
Calibration
or
Validation
M2
amp
error
(m)
M2
phase
error
(deg)
N2
amp
error
(m)
N2
phase
error
(deg)
S2
amp
error
(m)
S2
phase
error
(deg)
K1
amp
error
(m)
K1
phase
error
(deg)
O1
amp
error
(m)
O1
phase
error
(deg)
A Beacon Calibration -0.01 -1.42 -0.01 1.29 0.01 4.77 -0.01 3.67 -0.01 8.26
Tug Berth Calibration 0.03 -5.64 0.01 -3.69 0.02 1.19 -0.01 0.39 -0.01 9.93
Sulphur Point Calibration -0.01 -4.53 -0.01 -3.82 0.03 -1.24 -0.01 -15.46 0.01 2.89
Ōmokoroa Calibration -0.01 -6.73 -0.01 -6.56 0.03 -6.36 -0.01 -14.68 0.01 17.02
C1 Validation -0.04 -4.23 0.01 1.95 0.03 -0.28 -0.02 -11.77 0.01 13.48
C2 Validation -0.03 -3.89 0.02 2.45 0.03 0.79 -0.02 -13.48 0.01 15.23
C3 Validation -0.02 -4.25 0.02 1.91 0.03 -0.37 -0.02 -13.61 0.01 16.54
C5 Validation 0.00 -6.20 0.03 1.34 0.03 -2.45 -0.02 -14.42 0.01 16.61
Figure 8: Measured and modelled (Delft3D) water levels for calibration sites inside (Tug Berth, Sulphur Point and Ōmokoroa) and outside
(A Beacon) Tauranga Harbour.
05/10 06/10 07/10 08/10 09/10 10/10-1
-0.5
0
0.5
1A Beacon
Wat
er le
vel (
m)
Date
Measured water levelModelled (Delft3D) water level
05/10 06/10 07/10 08/10 09/10 10/10-1
-0.5
0
0.5
1Tug Berth
Wat
er le
vel (
m)
Date
05/10 06/10 07/10 08/10 09/10 10/10-1
-0.5
0
0.5
1Sulphur Point
Wat
er le
vel (
m)
Date05/10 06/10 07/10 08/10 09/10 10/10-1
-0.5
0
0.5
1Omokoroa
Wat
er le
vel (
m)
Date

RENA Environmental Recovery Monitoring Programme 413 | P a g e
Figure 9: Measured and modelled (Delft3D) water levels for validation sites outside (C1, C2, C3) and inside (C5) Tauranga Harbour.
3.2.2 Delft modelled currents
For the calibration period, modelled current velocities for the Delft3D model were consistently lower
than those measured at the Port of Tauranga ADCP site (MAE 0.41 m s-1; Figure 10; table 8).
Modelled current directions compared well with measured data however, with better agreement
between measured and modelled data on the flood tide (MAE 18 degrees), than on the ebb (MAE 30
degrees) (Table 9, Figure 12). The model also captured the pattern of higher ebb tide velocities,
compared to flood, although the velocities were consistently under-predicted.
Velocities at validation sites C1, C2 and C3 were also consistently lower than measured velocities
(MAE 0.04 to 0.10 m s-1, 52 to 67 % of the average measured current velocity). Velocities were better
predicted at site C5, however (MAE 0.10 m s-1, 22 % of the average measured current velocity; table
30). As with the ADCP (calibration) site, the model captured the pattern of higher ebb tide velocities
at sites inside and near the harbour entrance (i.e. C2, C3 and C5; Table 9). Modelled current
direction compared very well with measured data at site C5 (MAE ebb tide 3.5 degrees and MAE
flood tide 12.8 degrees), with reasonable agreement between measured and modelled data for sites
C1, C2 and C3 (MAE c. 10 – 14 degrees).
20/05 21/05 22/05 23/05 24/05 25/05-1
-0.5
0
0.5
1C1
Wat
er le
vel (
m)
Date20/05 21/05 22/05 23/05 24/05 25/05-1
-0.5
0
0.5
1C2
Wat
er le
vel (
m)
Date
20/05 21/05 22/05 23/05 24/05 25/05-1
-0.5
0
0.5
1C3
Wat
er le
vel (
m)
Date20/05 21/05 22/05 23/05 24/05 25/05
-1
-0.5
0
0.5
1C5
Wat
er le
vel (
m)
Date
Measured water levelModelled (Delft3D) water level

RENA Environmental Recovery Monitoring Programme 414 | P a g e
Table 8: Statistical comparison of measured and modelled (Delft3D) current velocities at calibration and validation sites. R2 is the
coefficient of determination, MAE is the mean absolute error, Meanobs is the mean of the measurements, Meanmod is the mean of the
model output. The Delft3D model output is from the appropriate model layer corresponding to the measured depth.
Model performance statistics for current velocity
Site Measurement
depth (m)
Calibration / Validation R2 MAE
(m s-1
)
Meanobs
(m s-1
)
Meanmod
(m s-1
)
ADCP Surface Calibration 0.83 0.41 1.10 0.72
C1 27.1 Validation 0.00 0.04 0.06 0.02
C2 10.2 Validation 0.40 0.10 0.19 0.10
C3 5.8 Validation 0.02 0.10 0.16 0.06
C5 9.5 Validation 0.75 0.10 0.45 0.41
Figure 10: Measured and modelled (Delft3D) current velocity at the mouth of the harbour (ADCP site).
05/10 06/10 07/10 08/10 09/10 10/100
0.5
1
1.5
2
2.5
Vel
ocity
(m/s
)
Date
Measured VelocityModelled (Delft3D-surface) Velocity

RENA Environmental Recovery Monitoring Programme 415 | P a g e
Figure 11: Measured (blue solid lines) and modelled (red dashed lines Delft3D) current velocity at validation sites outside (C1, C2, C3) and
inside (C5) Tauranga Harbour.
Figure 12: Measured (blue circles) and modelled (Delft3D- surface; red circles) current velocity (m s
-1) and direction (degrees) at the
harbour entrance (ADCP site).
20/05 21/05 22/05 23/05 24/05 25/050
0.2
0.4
0.6
0.8
1C1
Vel
ocity
(m
/s)
Date
Measured velocityModelled (Delft3D) velocity
20/05 21/05 22/05 23/05 24/05 25/050
0.2
0.4
0.6
0.8
1C2
Vel
ocity
(m
/s)
Date
20/05 21/05 22/05 23/05 24/05 25/050
0.2
0.4
0.6
0.8
1C3
Vel
ocity
(m
/s)
Date20/05 21/05 22/05 23/05 24/05 25/050
0.2
0.4
0.6
0.8
1C5
Vel
ocity
(m
/s)
Date

RENA Environmental Recovery Monitoring Programme 416 | P a g e
Figure 13: Measured (blue circles) and modelled (Delft3D; red circles) current velocity (m s
-1) and direction (degrees) at validation sites
outside (C1, C2 and C3) and inside (C5) Tauranga Harbour.
Table 9: Statistical comparison of measured and modelled (Delft3D) current speed and direction. MAE is the mean absolute error, Meanobs
is the mean of the measurements and Meanmod is the mean of the model output.
Speed (m s-1
) Direction (degrees)
Site Calibration /
Validation
Tide Meanobs Meanmod MAE Meanobs Meanmod MAE
ADCP Calibration Flood 1.10 0.72 0.33 145.77 163.88 18.11
Ebb 1.48 0.85 0.61 8.00 337.19 30.48
C1 Validation Flood 0.05 0.02 0.04 240.41 239.51 13.70
Ebb 0.02 0.02 0.01 66.28 64.48 9.13
C2 Validation Flood 0.12 0.07 0.06 213.19 205.17 13.31
Ebb 0.29 0.14 0.22 20.71 21.33 11.17
C3 Validation Flood 0.12 0.06 0.05 178.40 174.57 13.02
Ebb 0.23 0.09 0.21 334.05 335.48 10.86
C5 Validation Flood 0.47 0.35 0.10 278.54 265.47 12.82
Ebb 0.55 0.50 0.08 88.02 87.11 3.52

RENA Environmental Recovery Monitoring Programme 417 | P a g e
A Delft3D model with a finer resolution around Tauranga harbour entrance and tidal channels would
likely improve the accuracy of the predicted current velocities. The Tauranga Harbour ELCOM model
had a finer grid resolution (75 x 75 m cf. 200 x 200 m in Delft3D) and better resolved bathymetry and
had better agreement between measured and modelled velocities. Likewise, a Delft3D model of the
Tauranga Harbour southern entrance area (Spiers et al. 2009) achieved a MAE of less than 20% of
measured velocities (using the same dataset as used for model validation in this study), by increasing
grid resolution around the entrance to 2 x 2 m. However, such a reduction in grid size requires a
large reduction in the model time step, (3 seconds cf. 60 seconds in this study), which leads to a
much larger increase in model run times; simulations covering large areas and timespans are thus
rendered largely impractical. In future implementations, further consideration could be given to
using a variable grid resolution and more finely resolved bathymetry for areas near harbour
entrances, whilst retaining a coarser grid resolution offshore.
The Delft3D model was forced by tides only, so discrepancies between measured and modelled
velocities may be attributable to wind or swell conditions. This omission may be particularly relevant
at sites away from the influence of harbour entrances or tidal channels where tidal forcing may not
be the major driver of current velocities, such as at site C1. Although the Bay of Plenty coastline is a
typically a low-energy wave environment (Heath 1985), it is exposed to swell from the north and
north-easterly direction that may affect surface currents. Inclusion of, or coupling to, a wave model
would increase the complexity (and run times) of the hydrodynamic model and was outside the
scope of this study, but may improve model performance. However, preliminary simulations with
wind forcing included in the Delft3D model did not improve model fit, despite the inclusion in the
model of finely resolved vertical layers near the surface (Section 0). Wind forcing was instead
included in the GNOME particle tracking model, which included parameters for windage and
uncertainty, and this inclusion led to improved predictions of oil dispersal and accumulation.
3.3 GNOME
3.3.1 GNOME modelled oil accumulation and dispersal
The GNOME models were calibrated by adjusting parameters associated with diffusion, refloat half-
life, model time step, uncertainty and windage. Final calibrated parameters are detailed in Table 10.
Mud has a lower refloat half-life than sand; the refloat half-life was set at 12 hours for the shelf
model, and 6 hrs for the harbour model to reflect the more muddy environment in the estuary
(Dancuk, 2009). Along- and cross- current uncertainty values were increased for the shelf model
(compared to the harbour model) due to the under-prediction of current speed by the Delft3D
model.
As the Delft3D model under predicted tidal currents around the harbour entrance, combining the
ELCOM and Delft3D currents in one GNOME model led to large differences in modelled velocities at
the interface between the two hydrodynamic models. Instead, output from the GNOME shelf model
using Delft3D currents was used to prescribe the entrance point source conditions (i.e. timing,
amount) for the GNOME harbour model using ELCOM currents. The GNOME shelf model indicated
that the oil entered Tauranga harbour (through the southern entrance) from a north-easterly
direction between 10th and 13th October. The direction changed to north-westerly from 13th to 14th
October, and consequently the oil mostly began to move offshore, and more oil did not enter the
harbour until 30th October. These model results are consistent with SCAT surveys which indicated
presence of oil inside Tauranga harbour by 17th October (Figure 22).

RENA Environmental Recovery Monitoring Programme 418 | P a g e
Table 10: Calibrated model parameters for the GNOME models
Parameter Value Units
GNOME shelf model (using Delft3D currents)
Diffusion 1 m2 s
-1
Diffusion uncertainty 1
Refloat half-life 12 Hours
Time step 0.17 Hours
Windage 1-4 %
Wind speed scale 2 m s-1
Wind angle scale 0.4 Radians
Along current uncertainty 25 %
Cross current uncertainty 25 %
GNOME harbour model (using ELCOM currents)
Diffusion 1 m2 s
-1
Diffusion uncertainty 1
Refloat half-life 6 Hours
Time step 0.17 Hours
Along current uncertainty 5 %
Cross current uncertainty 5 %
3.3.2 Comparison with SCAT data
GNOME shelf model output generally compared well with observations. The amount of oil beached
(the best estimate, i.e. not including the uncertainty solution) was output from the model every 6
hours and visually compared with SCAT report data (Figure 14 and Figure 15).
The GNOME shelf model predicted that oil would first reach the shoreline on 11th October, and by
13th October large amounts of oil (c. 60 – 90 tonnes) would have accumulated. Although it was not
possible to estimate the actual amount of oil that did accumulate on the shoreline based on SCAT
reports (which recorded estimates of percentage cover) the observations do indicate that the
maximum oiling did occur on the 13th October, as predicted by the model. However, the model did
not predict the small amount of oil observed on the shoreline on the 10th October. This difference
may be due to the uncertainty around parameterising the release of oil from the Rena. Reports are
somewhat vague and conflicting about the timing and amount of oil lost from the vessel, and
inaccurate initialisation of the oil spill in GNOME will affect the accuracy of the simulation results.
Further peaks in oil accumulation on 15 - 16th October and 19th – 20th October captured by the model
also largely matched observations of maximum and average oil coverage on the shoreline (Figure 14
and Figure 15). The model appears to over-predict the oil beached on 19th – 20th October, but SCAT
reports indicate that there was beach clean-up (i.e. removal of oil) in progress before and around
this time. It was not possible to take removal of oil from beaches into account with the GNOME
model (and there was little data available on the actual amount of oil removed from the beaches
during clean-up operations). Therefore, removal of oil from the beaches during clean-up operations
may account for the over-prediction of oil accumulation around 19th – 20th October.

RENA Environmental Recovery Monitoring Programme 419 | P a g e
Figure 14: Amount of oil beached throughout the GNOME shelf model simulation (5
th October – 30
th October 2011).
Figure 15: Maximum (A) and average (B) oil coverage on shoreline (%) as assessed by SCAT surveys 7
th – 31
st October 2011 (Data source:
Maritime NZ).

RENA Environmental Recovery Monitoring Programme 420 | P a g e
3.3.3 Comparison with SCAT and over-flight maps
Immediately after the Rena grounding (6th to 8th October 2011) the GNOME shelf model predicted
the oil would disperse to the north and east (Figure 16), which is consistent with over-flight
observations (Figure 17).
The model predicted that oil would first reach Mt. Maunganui on 11th October and that by 13th
October the oiling would extend from Mt. Maunganui to Pāpāmoa (Figure 18). This prediction is
consistent with reports from Maritime NZ that indicate oiling first occurred at Mt. Maunganui and
heavy oiling was observed at Pāpāmoa on 13th October (MaritimeNZ 2011). Furthermore, over-flight
observations from the 13th October are consistent with GNOME output that shows oil in the water
extending from the Rena south-west towards the Mt. Maunganui/Pāpāmoa coastline (Figure 19).
The model predicted significant oiling on the mainland coastline and on the west coast of Mōtītī
Island by 19th October (Figure 20), which is largely in agreement with SCAT oiling summary charts
from this time (Figure 22). It should be noted that there is variability evident even in observed data;
for example, there are differences in oiling extent and amount from two SCAT summary charts for
17th October (Figure 22).
At the end of the model simulation (30th October) the amount of oil present on the shoreline had
decreased (compared to peaks earlier in October) but had increased in extent to include Tauranga
and Maketū harbours, most of Mōtītī Island and parts of the shoreline east of Maketū (Figure 21).
The model did not capture oiling on Matakana Island as part of the best estimate forecast solution,
but the uncertainty solution did indicate that oiling was possible from Waihi to Pukehina, which is
largely consistent with SCAT reports/charts for oil extent at the end of October and beginning of
November (Figure 23 and Figure 24). The model predicts oiling on the shoreline east of Maketū
estuary (e.g., at Pukehina beach), but SCAT reports indicate very little or no oil was observed there.
However, removal of oil from the shoreline between Mt. Maunganui and Maketū during clean-up
operations may have prevented remobilisation of oil and subsequent oiling on beaches south-east of
Maketū.
Figure 16: GNOME shelf model output (best estimate forecast and uncertainty solutions) for 6
th, 7
th and 8
th October 2011.
k
±
0 4 8 12 162Kilometers
GNOME06/10/2011 - 08/10/2011
k RenaForecast 08/10/2011 17:20
floatingUncertainty 08/10/2011 17:20
floatingForecast 07/10/2011 17:20
floatingUncertainty 07/10/2011 17:20
floatingForecast 06/10/2011 17:20
floatingUncertainty 06/10/2011 17:20
floating

RENA Environmental Recovery Monitoring Programme 421 | P a g e
Figure 17: Over-flight observations of oil extent from Rena on 6
th, 7
th and 8
th October 2011 (source: Maritime NZ).
Figure 18: GNOME shelf model output (best estimate forecast solution) for 21:20 on 11
th October 2011 (orange circles; oil has just reached
the shoreline at Mt. Maunganui) and for 06:20 on 13th
October 2011 (purple circles; oiling extends from Mt. Maunganui to Pāpāmoa).
k
±
0 4 8 12 162Kilometers
GNOME11/10/2011 - 13/10/2011
k RenaForecast 13/10/2011 06:20
BeachedFloating
Forecast 11/10/2011 21:20BeachedFloating

RENA Environmental Recovery Monitoring Programme 422 | P a g e
Figure 19: Over-flight observations of oil extent from Rena on 13
th October 2011 (source: Maritime NZ).
Figure 20: GNOME shelf model output (forecast = black circles and uncertainty solution = red circles) for 18:20 on 19
th October 2011.
k
±
0 4 8 12 162Kilometers
GNOME19/10/2011
k Rena
Forecast 19/10/2011 18:20Beached
Floating
Uncertainty 19/10/2011 18:20Beached
Floating

RENA Environmental Recovery Monitoring Programme 423 | P a g e
Figure 21: GNOME shelf model output (forecast = black circles and uncertainty solution = red circles) for 21:20 on 30
th October 2011.
k
±
0 4 8 12 162Kilometers
GNOME30/10/2011
k Rena
Forecast 30/10/2011 21:20Beached
Floating
Uncertainty 30/10/2011 21:20Beached
Floating

RENA Environmental Recovery Monitoring Programme 424 | P a g e
Figure 22: SCAT oiling summaries for 17
th October 2011 (source: Maritime NZ).

RENA Environmental Recovery Monitoring Programme 425 | P a g e
Figure 23: SCAT oiling summary for 22
nd – 27
th October 2011 (source: Maritime NZ).
Figure 24: SCAT oiling summary for 4
th November 2011 (source: Maritime NZ).

RENA Environmental Recovery Monitoring Programme 426 | P a g e
Tauranga Harbour and Maketū estuary
The GNOME shelf model indicated that oil entered Tauranga Harbour between the 10th and 14th
October 2011. Output from the GNOME model for Tauranga Harbour is consistent with SCAT data
that indicates by the 17th October oil had accumulated on the shoreline inside the harbour entrance
near Mt. Maunganui, near Matua and Ōtūmoetai, with small amounts also present on the southern
shoreline of Matakana Island (Figure 25 and Figure 26).
The GNOME shelf model indicated that the oil took longer to reach Maketū estuary than Tauranga
Harbour; oil first arrived at the entrance on 13th October, with significant oiling of Ōkūrei Point (the
headland outside of Maketū estuary) around 18th – 24th October. The model indicated that a small
amount of oil entered the Maketū estuary, and beached just inside the harbour entrance, which is
consistent with SCAT reports (Figure 27 and Figure 28).
Figure 25: GNOME harbour model output (best estimate forecast solution = black circles, uncertainty solution = red circles) for 18:20 on
17th
October 2011 (beached oil only).
Figure 26: SCAT oiling summaries for Tauranga Harbour on 17
th October 2011 (source: Maritime NZ).

RENA Environmental Recovery Monitoring Programme 427 | P a g e
Figure 27: GNOME shelf model output for Maketū estuary area (best estimate forecast solution = black circles, uncertainty solution = red
circles) for 18:20 on 24th
October 2011 (beached oil only).
Figure 28: SCAT oiling summary for Maketū on 24
th October 2011 (source: Maritime NZ).

RENA Environmental Recovery Monitoring Programme 428 | P a g e
3.4 Fate of released oil
3.4.1 Shelf model
The amount of oil released, floating, beached, evaporated and dispersed, and that which had moved
out of the modelled area (“off map”) was output from the model every 6 hours for the entire
simulation (Figure 29). The majority of the oil over most of the simulation remained floating;
although a significant proportion (100 tonnes or c. 35 % of that released) had evaporated or
dispersed within a few days. The amount of oil beached on the shoreline averaged c. 10 % of the
total released over the entire simulation (i.e. 5th – 30th October), although this peaked at 30 % at
three and ten days after release. By the end of the simulation (30th October 2011) c. 40 % of the oil
had travelled outside of the modelled area (mostly to the north and east). The amount of oil
entering Tauranga Harbour and Maketū estuary was relatively small (< 5 - 10 tonnes).
Figure 29: Amount of oil released from Rena, floating, beached on shoreline, evaporated and dispersed or “off map” (i.e. outside of
modelled area) throughout the duration of the GNOME shelf model simulation (5th
October – 30th
October 2011).
The oil that did beach on the shoreline was not evenly dispersed, with “hot spots” of accumulation
evident in the model output, specifically at Pāpāmoa beach, parts of the western shoreline of Mōtītī
Island, and Ōkūrei Point. The model only includes the effect of winds and tides, and does not
include the effect of waves and surf-zone currents. Surfzone rip currents are common along the
Pāpāmoa coast, and these would trap oil within their recirculation systems. Mōtītī Island provides a
shallow barrier from the influence of waves, and waves would refract on the shallow topography
landward of Mōtītī (Figure 3), so that the wave-induced drift currents and the alongshore currents
would converge behind this island, explaining the heavier accumulation here (e.g. Figure 22).
Moderate accumulation on the northwest side of Mōtītī and also on Ōkūrei Point are predicted by
the model, and are due to the north-easterly winds advecting the oil southward.
3.4.2 Tauranga harbour model
For the Tauranga harbour GNOME model, the amount of oil released, floating, beached, evaporated
and dispersed was output from the model every 6 hours for the entire simulation (Figure 30). As for
the shelf model, the majority of oil remained floating, and a large amount (c. 25 %) evaporated or
dispersed. However, on average c. 35 % of the oil beached on the shoreline and the amount floating
and beached changed as oil was stranded on tidal flats during low tide and re-floated at high tide. Of
the oil that entered the harbour, the model predicted that the larger percentage would remain
floating, so the booms that were deployed within the harbour during the clean-up scheme were
essential to trapping this floating oil.

RENA Environmental Recovery Monitoring Programme 429 | P a g e
Figure 30: Amount of oil released (at Tauranga harbour southern entrance), floating, beached on shoreline, evaporated and dispersed
throughout the GNOME harbour model simulation (5th
October – 30th
October 2011). (There is no removal of oil included in the GNOME
modelling).
“Hot spots” of accumulation were also evident in Tauranga Harbour, particularly inside the harbour
entrance near Mt. Maunganui, with smaller amounts at the southern tip of Matakana Island, the
shoreline near Matua, Ōtūmoetai and Sulphur Point. Tidal residual currents cause a net circulation
across the flood tidal delta and a clockwise back-eddy behind Mount Maunganui. This back-eddy
would concentrate oil at the north end of Pilot Bay. The model also shows that the main entrance
tidal jet is oriented more northward, toward Panepane Point. As the tide floods out of the Harbour,
two eddies are formed on either side of the jet, on the seaward side of the entrance. Because of the
influence of the Mount, and the northerly orientation of the tidal jet, the anti-clockwise eddy on the
Mount side of the jet is much stronger than on the other side (Figure 30). This eddy recirculates oil in
the entrance channel, and may cause it to be trapped and concentrated around the edge of the
Mount (particularly where the SCAT maps indicate ‘heavy’ deposition. The GNOME model also
predicted deposition within the Port of Tauranga, which was not reported in the SCAT maps.
However, it is not clear whether SCAT surveys were conducted within the Port. It is also possible that
the wharf structure did not easily allow accumulation of oil.

RENA Environmental Recovery Monitoring Programme 430 | P a g e
Figure 31: Tidal residual circulation within the harbour showing how backeddies might concentrate material at the northend of Pilot Bay,
and along Matua. Taken from Tay et al., in press. The black circles and arrows indicate the location of observations used for model
calibration.

RENA Environmental Recovery Monitoring Programme 431 | P a g e
4. Conclusions
Currents in the Bay of Plenty and within Tauranga Harbour were modelled using the state-of-the-art
3-D hydrodynamic models Delft3D (developed by Deltares in the Netherlands) and ELCOM
(developed by the University of Western Australia), and the model results were used as input to the
NOAA oil spill model ‘GNOME’. The Delft3D model was driven with tidal currents only, and wind was
included in the GNOME input conditions. This combination provided a better result than modelling
the wind and tides within Delft3D, because of the better formulation of wind effects on oil within
GNOME. Model output was calibrated and verified against water level and current meter
observations collected by the Port of Tauranga, Bay of Plenty Regional Council and from previous
studies conducted by the University of Waikato.
Results from the Bay of Plenty model show that oil first reached the shore on the 10th of October, 5
days after the grounding, which is consistent with assessments by SCAT surveys. The oil was
predicted to arrive on the shore in pulses, which were governed by the tidal influence on the release
of oil from the ship, and also by the strong dependence of the oil dispersal on the strength and
direction of the wind. The delayed land-fall of the oil was due to the off-shore wind that occurred
during the time of grounding. Two weeks after the grounding, the majority of the oil had spread
southward along the coast, with hot spots of accumulation on the northwest side of islands (e.g.
Mōtītī) and headlands (e.g. Ōkūrei Point), also consistent with SCAT surveys. Hot spots of
accumulation along the open coast beaches (e.g. Pāpāmoa) were not well predicted due to the lack
of representation of wave and surfzone conditions within the model. Although the Delft3D
modelling package can model rip-current circulation, these models are very much under
development.
Water in the lower part of Tauranga Harbour (around the Port), is extremely well flushed (Tay et al.,
in press) due to the shallow depth and strong tidal currents, and when oil reached the entrance of
the Harbour, it was transported into the Harbour within a tidal cycle. The main areas of
accumulation were in the Pilot Bay region, where back-eddies concentrated the oil. The narrow
entrances of subestuaries (e.g. Waikareao Estuary and Stella Passage), restricted the oil movement
into the upper reaches. The majority of the oil in the estuary was predicted to remain floating for
weeks justifying an emphasis on deployment booms as a clean-up strategy.
The greatest limitation in this study is the estimates made of the time of the release of oil from the
Rena. The wind and tidal patterns are constantly changing on the shelf, and a slightly different
release time can significantly change the predicted accumulation. Although the tidal currents are
reasonably well predicted, the wind and wave-driven currents are much more difficult to predict,
and very little validation data exists on the shelf. Only a very short (c. a month) deployment from
locations that were chosen for a specific investigation around the ebb-tidal delta were available.
Finally, the SCAT reports only provided qualitative information on the accumulation of oil, which
could not be statistically compared with the model results (which provided predictions of tonnes of
accumulation).
We have four possible recommendations for future hazard management around our ports.
� It would be useful to pre-run scenarios of the dispersal patterns that would occur with the
most common summer and winter weather patterns from various potential grounding
locations, and develop a hazard map which can be used to organise response teams and
resources (e.g. booms) quickly in the event of another spill.
� It would be very useful to install a HF RADAR system which could be used for operational
forecasting of currents around the harbour entrance. Such systems provide surface current

RENA Environmental Recovery Monitoring Programme 432 | P a g e
patterns in real-time, over kilometre scales, which can be used to train forecasting models to
provide highly-accurate results.
� It would significantly improve our national operational oceanography capability by investing in
operational shelf modellers at a national level (and not relying on this capability development
to occur largely in private consultancies) and by insisting that such capability is based on open-
source models and freely (and easily) available observations so that uptake of technology is
maximised. We should also agree on a common open-source model so that bathymetries and
boundary files can easily be exchanged between working groups. At the moment we have a
number of working groups replicating core wave, tide and current forecasting capability
because of lack of free information exchange. This is wasting valuable resources that could be
used to produce highly-effective (and cost effective) hazard management. Production of shelf-
oceanographic forecasts should be a national priority and should be managed by key
performance indicators, such as producing a forecast to a specified degree of accuracy within
a specific timeframe following an event.
� New Zealand has a scarcity of observational buoys in its waters. Such real time observations
and data assimilative models are imperative in order to make accurate real time modelling
forecasts. Such operational forecasts are needed in many situations, from oil spill response to
monitoring of harmful algal blooms to search and rescue operations. Further, by including
measurements from all aspects of the marine environment - not only physical measurements
(wave, current and temperature and salinity) but also biogeochemical and optical water
quality measurements - such buoys provide a window to longer-term oceanic changes.
Deployment of a number of buoys in key locations and free access to the data would bring
New Zealand into line with other nations would greatly enhance our capability for marine
environmental prediction. Deploying and maintaining such an observational system is complex
and would require multi-organisational cooperation between all interested parties such as
government, regional councils, Crown Research Institutes and Universities.

RENA Environmental Recovery Monitoring Programme 433 | P a g e
5. Recommendations
The combination of 3D-hydrodynamic modelling and GNOME modelling was a useful, relatively low
cost way to successfully predict the extent of oil dispersal after an oil spill, particularly if the wind
was incorporated in GNOME rather than in the hydrodynamic model. Better prediction could result
if it were possible to more accurately measure the release of oil from the ship.
The main limitations of the modelling were not the design of the models themselves, but the
availability of observations to drive and calibrate the models. Much of the work developing and
calibrating the models can be done prior to an event. This would be easier to accomplish if all groups
working in and around the harbour could adopt a common (and open-source) modelling framework
so that each new component of work could build on the previous work. For example, the US Army
Corps of Engineers (USACE) has adopted the open-source Delft3D modelling system as their
community model for near shore and coastal modelling. Thus groups working at university and
government labs all around the US can easily interact and exchange modelling information, and
better serve the USACE goal of improved coastal hazard management.
It would also be useful to have spatial measurements of surface currents around the main navigation
channel such as could be provided by an HF Radar system. Observations of the offshore wind
conditions would provide an excellent complement to the weather station at Tauranga Airport.
Finally, deployment of observational buoys in New Zealand waters, which provide physical and
biogeochemical measurements, would greatly enhance the capability of predictive models.

RENA Environmental Recovery Monitoring Programme 434 | P a g e
6. Acknowledgements
We would like to acknowledge the support of Maritime New Zealand in providing access to data. Dr
Christian Winter and Eva Kwoll from the University of Bremen provided Delft3D model grids and set
up. Laura Hines collated the oil spill response information from Maritime New Zealand as part of her
summer school project. Dr Kyle Spiers (former student) provided current meter data for around the
entrance, and the Port of Tauranga provided water level and current meter data. Bay of Plenty
Regional Council provided water level data from inside Tauranga Harbour.

RENA Environmental Recovery Monitoring Programme 435 | P a g e
7. Bibliography
Dancuk, S.N. (2009) The fate and transport of light petroleum hydrocarbons in the lower Mississippi
River delta. PhD Thesis, Louisiana State University.
Deltares (2011) Delft3D-FLOW: Simulation of multi-dimensional hydrodynamics flows and transport
phenonmena, including sediments. User manual version 3.15. Deltares, The Netherlands.
Elias, E.P.L., Walstra, D.J.R., Roelvink, J.A., Stive, M.J.F., and Klein, M.D. Hydrodynamic validation of
Delft3D with field measurements at Egmond. In '27th International Conference on Coastal
Engineering', 2000, Sydney, Australia, pp. 2714-2727.
Heath, R.A. (1985) A review of the physical oceanography of the seas around New Zealand - 1982.
New Zealand Journal of Marine and Freshwater Research 19(1), 79-124.
Hodges, B., and Dallimore, C. (2011) Estuary, Lake and Coastal Ocean Model: ELCOM; v2.2 Science
Manual. Centre for Water Research, University of Western Australia.
Kwoll, E. (2010) Evaluation of the Tauranga Harbour numerical model. MSc Thesis, University of
Bremen.
Lesser, G.R., Roelvink, J.A., van Kester, J.A.T.M., and Stelling, G.S. (2004) Development and validation
of a three-dimensional morphological model. Coastal Engineering 51(8–9), 883-915.
Maritime NZ (2011) Rena Grounding Timeline. Available at http://www.maritimenz.govt.nz/Rena/.
Mullarney, J.C., Hay, A.E., and Bowen, A.J. (2008) Resonant modulation of the flow in a tidal channel.
Journal of Geophysical Research 113(C10007).
NOAA (2012) General NOAA Operational Modeling Environment (GNOME) Technical
Documentation. National Oceanic and Atmospheric Administration, Office of Response and
Restoration.
Pawlowicz, R., Beardsley, B., and Lentz, S. (2002) Classical tidal harmonic analysis including error
estimates in MATLAB using T-TIDE. Computers & Geosciences 28(8), 929-937.
Soulsby, R. (1997) 'Dynamics of marine sands: A manual for practical applications.' (Thomas Telford
Publications Ltd.: London) 249 pp.
Spiers, K.C., Healy, T.R., and Winter, C. (2009) Ebb-Jet Dynamics and Transient Eddy Formation at
Tauranga Harbour: Implications for Entrance Channel Shoaling. Journal of Coastal Research
25(1), 234-247.
Tay, H.W., Bryan, K.R., de Lange, W.P., and Pilditch, C.A. (in press.) The hydrodynamics of the
southern basin of Tauranga Harbour. New Zealand Journal of Marine and Freshwater
Research.
Vennell, R. (2006) ADCP measurements of momentum balance and dynamic topography in a
constricted tidal channel. Journal of Physical Oceanography 36(2), 177-188.