Embed Size (px)
Citation preview
Chapter 11
Dr. Mohammad Suliman Abuhaiba, P.E. 1
Kinematics of Particles
1/31/2014 8:29 PM
Introduction Mechanics
Mechanics = science which
describes and predicts the
conditions of rest or motion of
bodies under the action of forces
It is divided into three parts:
1. Mechanics of rigid bodies
2. Mechanics of deformable bodies
3. Mechanics of fluids
Dr. Mohammad Suliman Abuhaiba, P.E.
2 1/31/2014 8:29 PM
Introduction
Mechanics of rigid bodies is subdivided into:
1. Statics: deals with bodies at rest
2. Dynamics: deals with bodies in
motion
Dr. Mohammad Suliman Abuhaiba, P.E.
3 1/31/2014 8:29 PM
Introduction
Dynamics is subdivided into:
1. Kinematics
study of geometry of motion.
relating displacement, velocity,
acceleration, and time without reference to the cause of motion
2. Kinetics
study of the relation existing between the
forces acting on a body, the mass of the body, and the motion of the body
Dr. Mohammad Suliman Abuhaiba, P.E.
4 1/31/2014 8:29 PM
Introduction
A dynamic study could be done on two levels:
1. Particle
an object whose size and shape can
be ignored when studying its motion.
2. Rigid Body
a collection of particles that remain at
fixed distance from each other at all
times and under all conditions of
loading.
Dr. Mohammad Suliman Abuhaiba, P.E.
5 1/31/2014 8:29 PM
Motion of Particles
Motion of Particles:
1. Rectilinear Motion
2. Curvilinear Motion
Dr. Mohammad Suliman Abuhaiba, P.E.
6 1/31/2014 8:29 PM
Rectilinear Motion of Particles
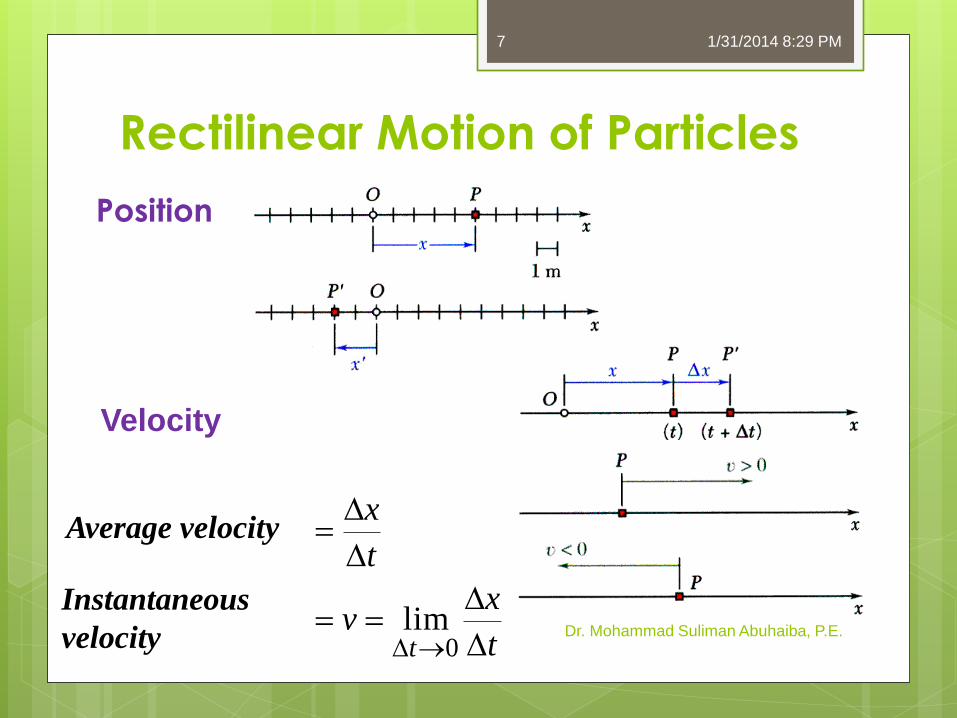
Position
Dr. Mohammad Suliman Abuhaiba, P.E.
7
Velocity
t
xv
t
x
t
0lim
Average velocity
Instantaneous
velocity
1/31/2014 8:29 PM

Rectilinear Motion of Particles
Acceleration
Dr. Mohammad Suliman Abuhaiba, P.E.
8
Instantaneous
acceleration t
va
t
0lim
t
v
Average acceleration
1/31/2014 8:29 PM
Rectilinear Motion of Particles
Dr. Mohammad Suliman Abuhaiba, P.E.
9
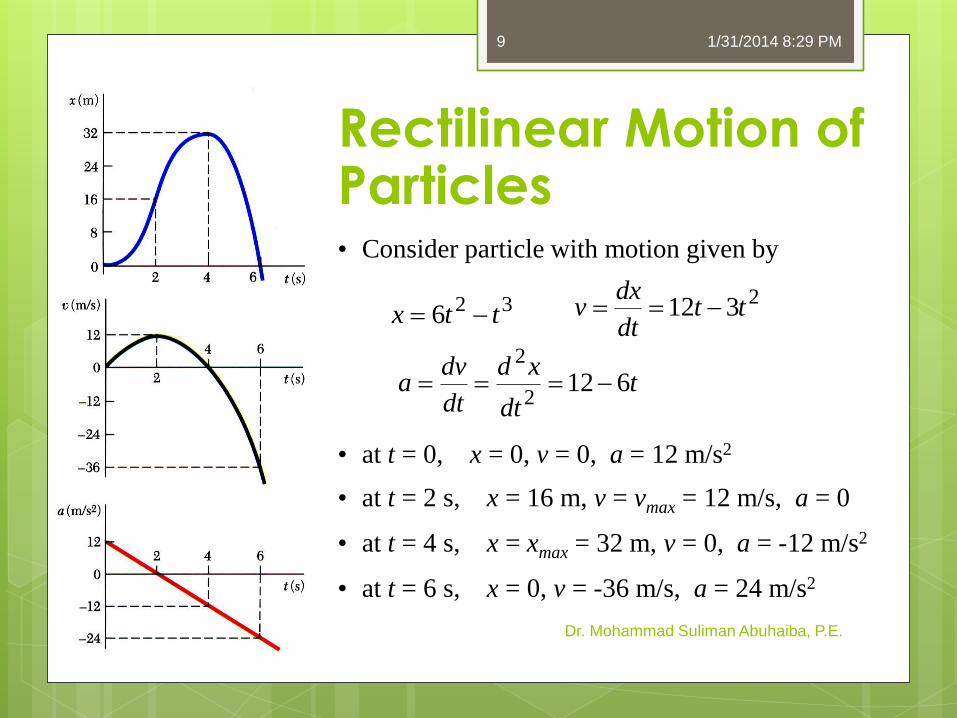
• Consider particle with motion given by
326 ttx 2312 tt
dt
dxv
tdt
xd
dt
dva 612
2
2
• at t = 0, x = 0, v = 0, a = 12 m/s2
• at t = 2 s, x = 16 m, v = vmax = 12 m/s, a = 0
• at t = 4 s, x = xmax = 32 m, v = 0, a = -12 m/s2
• at t = 6 s, x = 0, v = -36 m/s, a = 24 m/s2
1/31/2014 8:29 PM
• Typically, conditions of motion are specified by
type of acceleration experienced by the particle.
• Determination of velocity & position requires two
successive integrations.
Determination of Motion of a Particle
Dr. Mohammad Suliman Abuhaiba, P.E.
10 1/31/2014 8:29 PM
Three classes of motion may be defined:
1.acceleration is a function of time, a = f(t)
2.acceleration is a function of position, a = f(x)
3.acceleration is a function of velocity, a = f(v)
Determination of Motion of a Particle
Dr. Mohammad Suliman Abuhaiba, P.E.
11 1/31/2014 8:29 PM
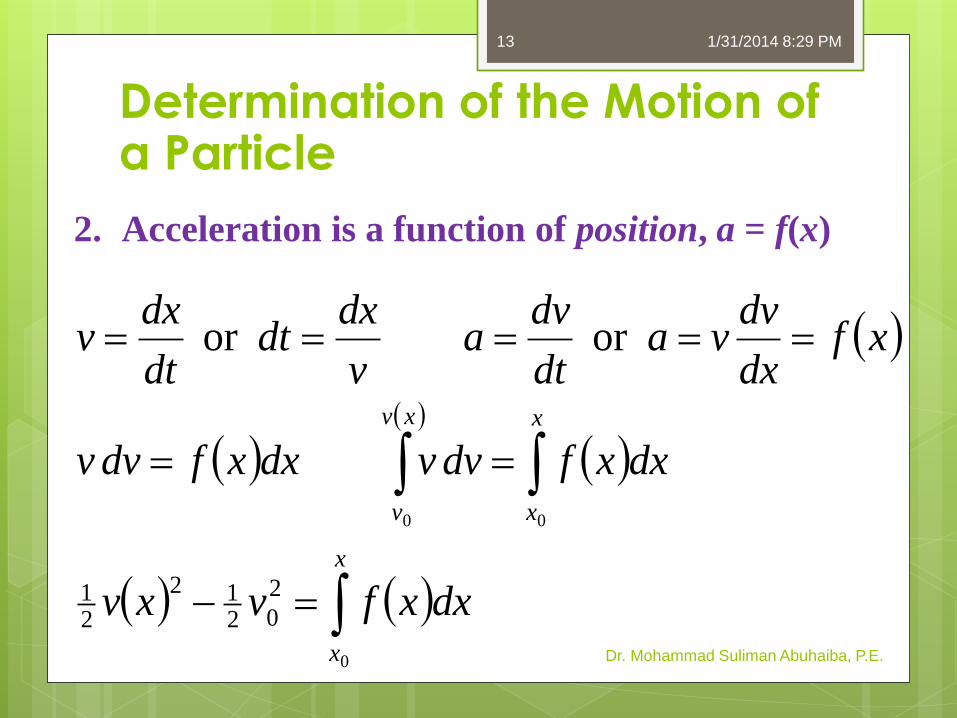
Determination of the Motion of a Particle
Dr. Mohammad Suliman Abuhaiba, P.E.
12
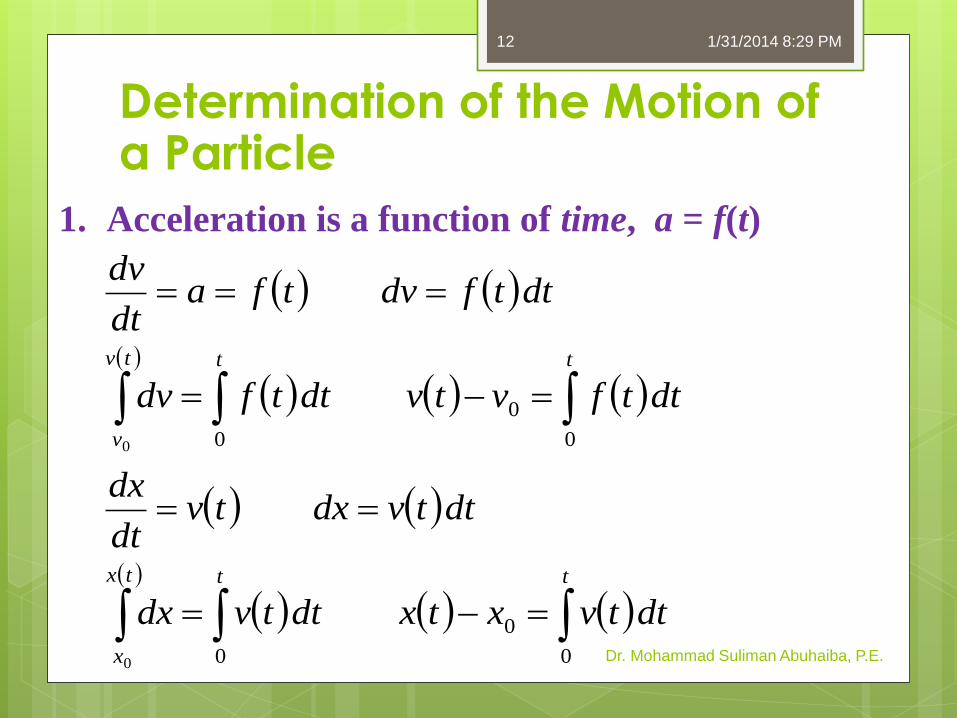
1. Acceleration is a function of time, a = f(t)
tttx
x
tttv
v
dttvxtxdttvdx
dttvdxtvdt
dx
dttfvtvdttfdv
dttfdvtfadt
dv
0
0
0
0
0
0
0
0
1/31/2014 8:29 PM
Determination of the Motion of a Particle
Dr. Mohammad Suliman Abuhaiba, P.E.
13
2. Acceleration is a function of position, a = f(x)
x
x
x
x
xv
v
dxxfvxv
dxxfdvvdxxfdvv
xfdx
dvva
dt
dva
v
dxdt
dt
dxv
0
00
2
0212
21
or or
1/31/2014 8:29 PM
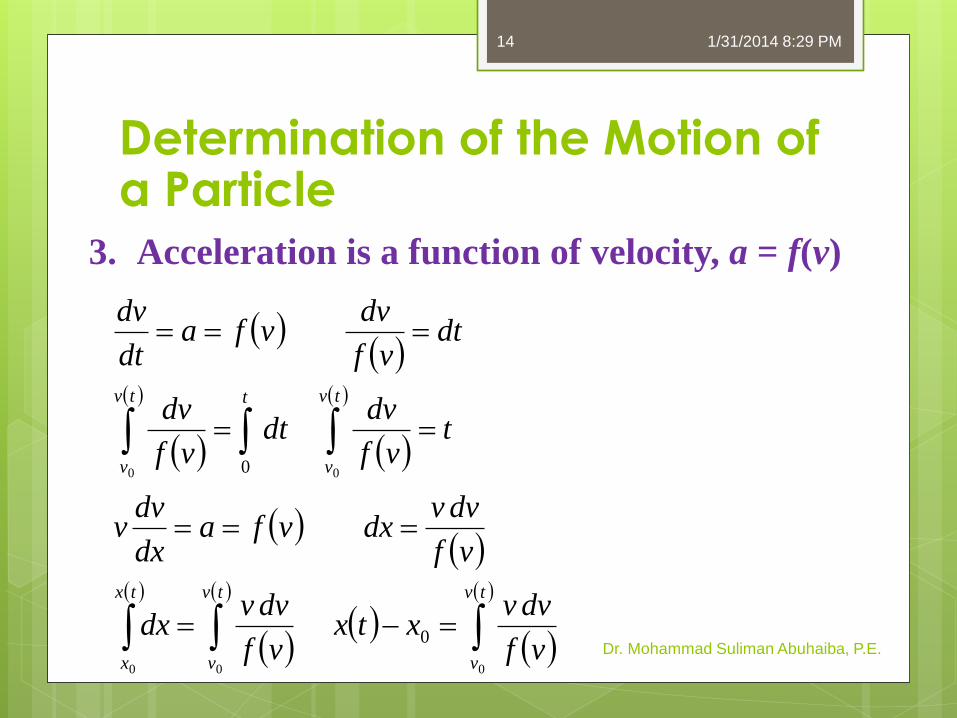
Determination of the Motion of a Particle
Dr. Mohammad Suliman Abuhaiba, P.E.
14
3. Acceleration is a function of velocity, a = f(v)
tv
v
tv
v
tx
x
tv
v
ttv
v
vf
dvvxtx
vf
dvvdx
vf
dvvdxvfa
dx
dvv
tvf
dvdt
vf
dv
dtvf
dvvfa
dt
dv
000
00
0
0
1/31/2014 8:29 PM

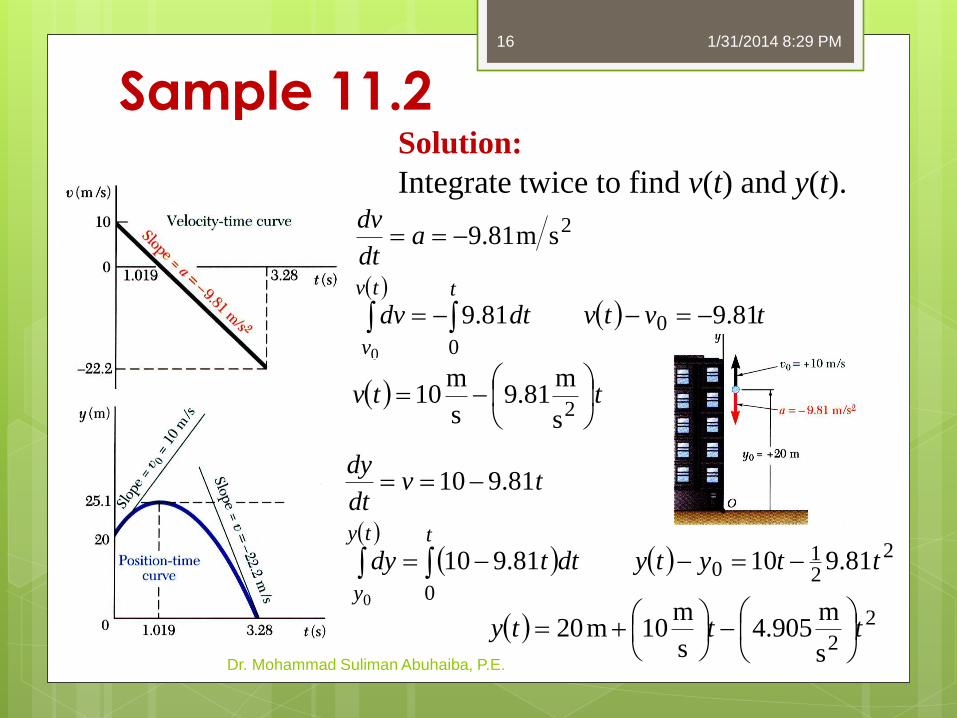
Sample 11.2
Dr. Mohammad Suliman Abuhaiba, P.E.
15
Determine:
a. velocity & elevation above ground
at time t
b. highest elevation reached by ball
and corresponding time
c. time when ball will hit the ground
and corresponding velocity
Ball tossed with 10 m/s vertical
velocity from window 20 m above
ground.
1/31/2014 8:29 PM
Sample 11.2
Dr. Mohammad Suliman Abuhaiba, P.E.
16
Solution:
Integrate twice to find v(t) and y(t).
tvtvdtdv
adt
dv
ttv
v
81.981.9
sm81.9
00
2
0
ttv
2s
m81.9
s
m10
2
21
00
81.91081.910
81.910
0
ttytydttdy
tvdt
dy
tty
y
2
2s
m905.4
s
m10m20 ttty
1/31/2014 8:29 PM
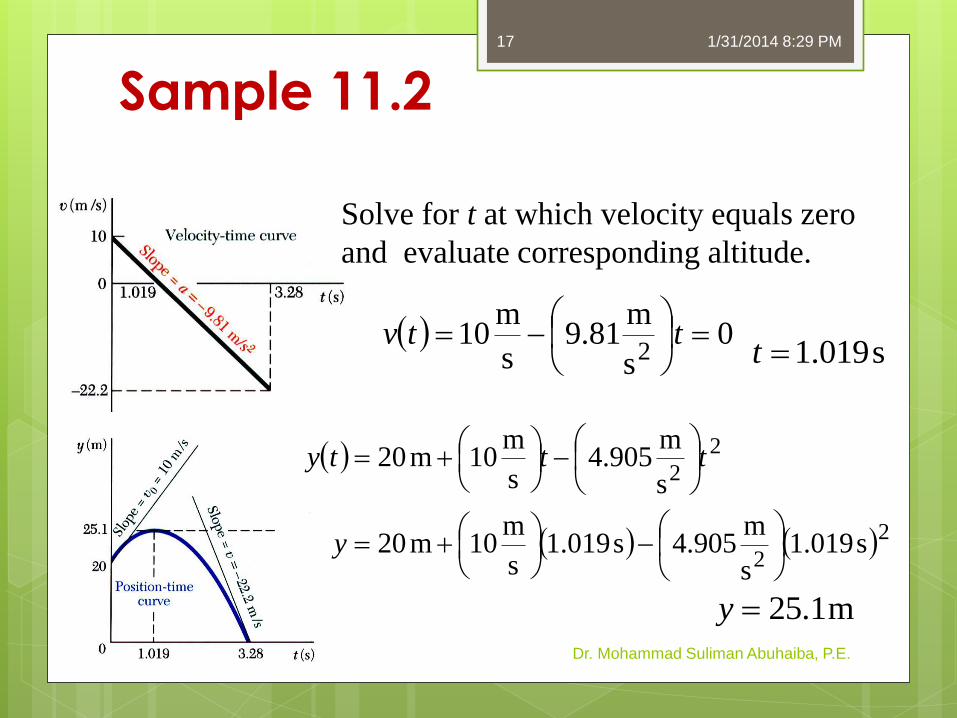
Solve for t at which velocity equals zero
and evaluate corresponding altitude.
0s
m81.9
s
m10
2
ttv
s019.1t
2
2
2
2
s019.1s
m905.4s019.1
s
m10m20
s
m905.4
s
m10m20
y
ttty
m1.25y
Dr. Mohammad Suliman Abuhaiba, P.E.
17
Sample 11.2
1/31/2014 8:29 PM
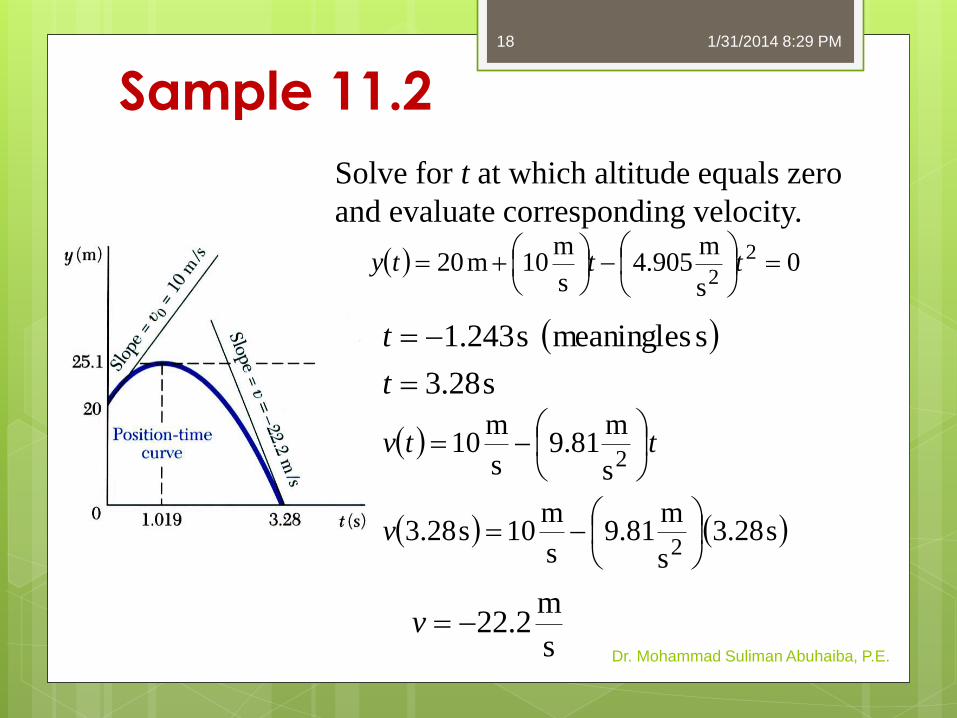
Solve for t at which altitude equals zero
and evaluate corresponding velocity.
0s
m905.4
s
m10m20 2
2
ttty
s28.3
smeaningles s243.1
t
t
s28.3s
m81.9
s
m10s28.3
s
m81.9
s
m10
2
2
v
ttv
s
m2.22v
Dr. Mohammad Suliman Abuhaiba, P.E.
18
Sample 11.2
1/31/2014 8:29 PM

Sample 11.3
Dr. Mohammad Suliman Abuhaiba, P.E.
19
Brake mechanism used to reduce gun recoil consists of piston
attached to barrel moving in fixed cylinder filled with oil. As
barrel recoils with initial velocity v0, piston moves and oil is
forced through orifices in piston, causing piston and cylinder to
decelerate at rate proportional to their velocity; that is a = -kv
Determine v(t), x(t), and v(x).
1/31/2014 8:29 PM
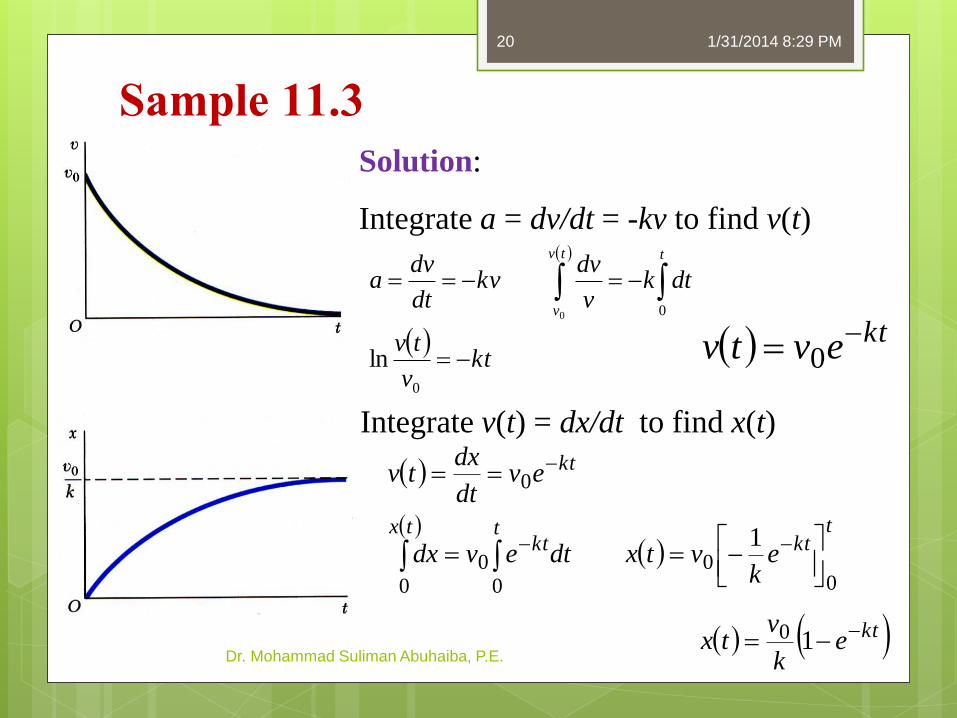
Sample 11.3 Solution:
Integrate a = dv/dt = -kv to find v(t)
kt
v
tv
dtkv
dvkv
dt
dva
ttv
v
0
0
ln
0
ktevtv 0
Integrate v(t) = dx/dt to find x(t)
tkt
tkt
tx
kt
ek
vtxdtevdx
evdt
dxtv
00
00
0
0
1
ktek
vtx 10
Dr. Mohammad Suliman Abuhaiba, P.E.
20 1/31/2014 8:29 PM
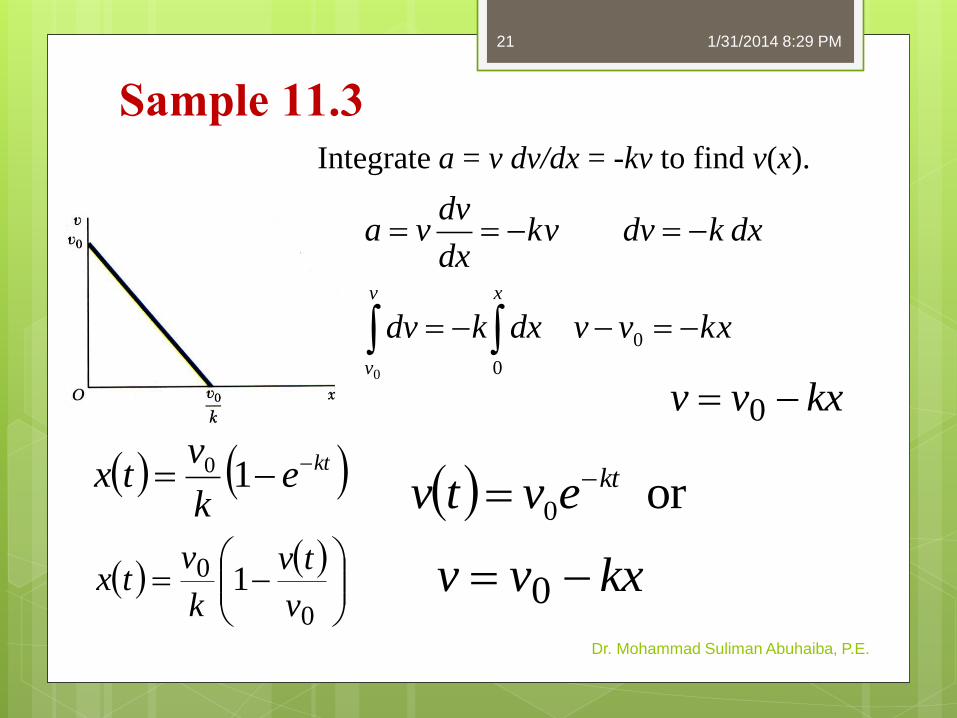
Integrate a = v dv/dx = -kv to find v(x).
kxvvdxkdv
dxkdvkvdx
dvva
xv
v
0
0
0
kxvv 0
0
0 1v
tv
k
vtx kxvv 0
or 0
ktevtv kte
k
vtx 10
Dr. Mohammad Suliman Abuhaiba, P.E.
21
Sample 11.3
1/31/2014 8:29 PM
Home Work Assignment #11.1
1, 6, 11, 17, 22, 29 Due Sunday 9/2/2014
Dr. Mohammad Suliman Abuhaiba, P.E.
22 1/31/2014 8:29 PM
Uniform Rectilinear Motion
Dr. Mohammad Suliman Abuhaiba, P.E.
23
Acceleration is zero and velocity is constant
vtxx
vtxx
dtvdx
vdt
dx
tx
x
0
0
00
constant
1/31/2014 8:29 PM
Uniformly Accelerated Rectilinear Motion
Dr. Mohammad Suliman Abuhaiba, P.E.
24
Acceleration of the particle is constant
atvv
atvvdtadvadt
dv tv
v
0
000
constant
221
00
221
000
00
0
attvxx
attvxxdtatvdxatvdt
dx tx
x
020
2
020
221
2
constant
00
xxavv
xxavvdxadvvadx
dvv
x
x
v
v
1/31/2014 8:29 PM

Motion of Several Particles Relative Motion
Dr. Mohammad Suliman Abuhaiba, P.E.
25
For particles moving along the same line, time should be
recorded from the same starting instant and displacements
should be measured from the same origin in the same direction.
ABAB xxx relative position of B wrt A
ABAB xxx
ABAB vvv relative velocity of B wrt A
ABAB vvv
ABAB aaa relative acceleration of B wrt A
ABAB aaa
1/31/2014 8:29 PM
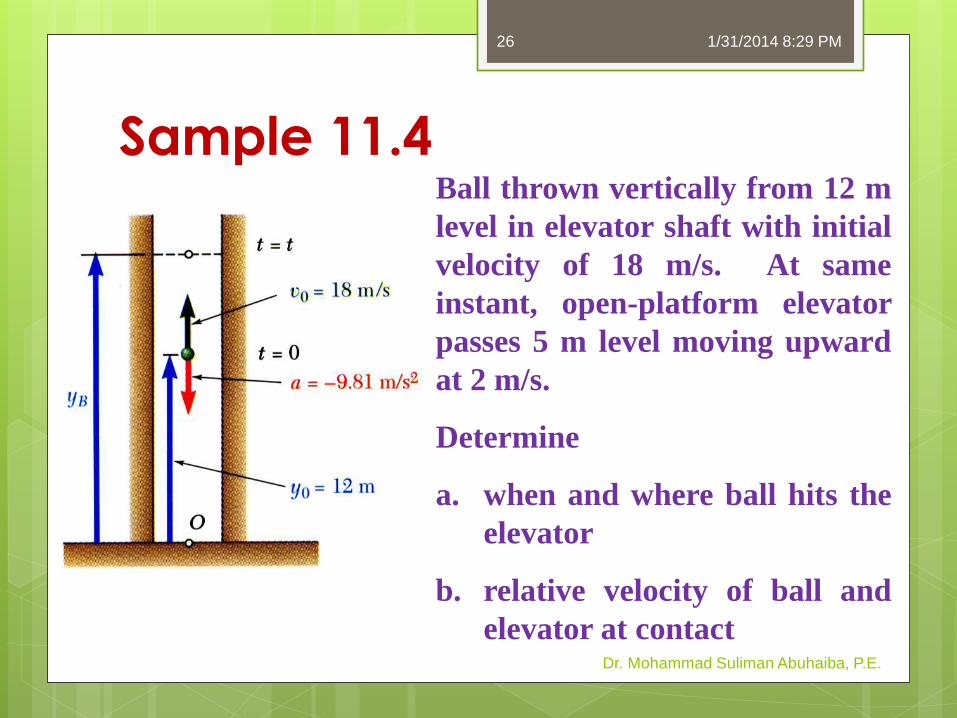
Ball thrown vertically from 12 m
level in elevator shaft with initial
velocity of 18 m/s. At same
instant, open-platform elevator
passes 5 m level moving upward
at 2 m/s.
Determine
a. when and where ball hits the
elevator
b. relative velocity of ball and
elevator at contact
Sample 11.4
Dr. Mohammad Suliman Abuhaiba, P.E.
26 1/31/2014 8:29 PM

Dr. Mohammad Suliman Abuhaiba, P.E.
27
Solution:
ball moves with uniformly accelerated
rectilinear motion.
2
2
221
00
20
s
m905.4
s
m18m12
s
m81.9
s
m18
ttattvyy
tatvv
B
B
ttvyy
v
EE
E
s
m2m5
s
m2
0
elevator moves with uniform
rectilinear motion.
Sample 11.4
1/31/2014 8:29 PM

Write equation for relative position of
ball wrt elevator & solve for zero
relative position (impact)
025905.41812 2 ttty EB
s65.3
smeaningles s39.0
t
t
Substitute impact time into equations for position of
elevator & relative velocity of ball wrt elevator.
65.325 Ey m3.12Ey
65.381.916
281.918
tv EB
s
m81.19EBv
Dr. Mohammad Suliman Abuhaiba, P.E.
28
Sample 11.4
1/31/2014 8:29 PM
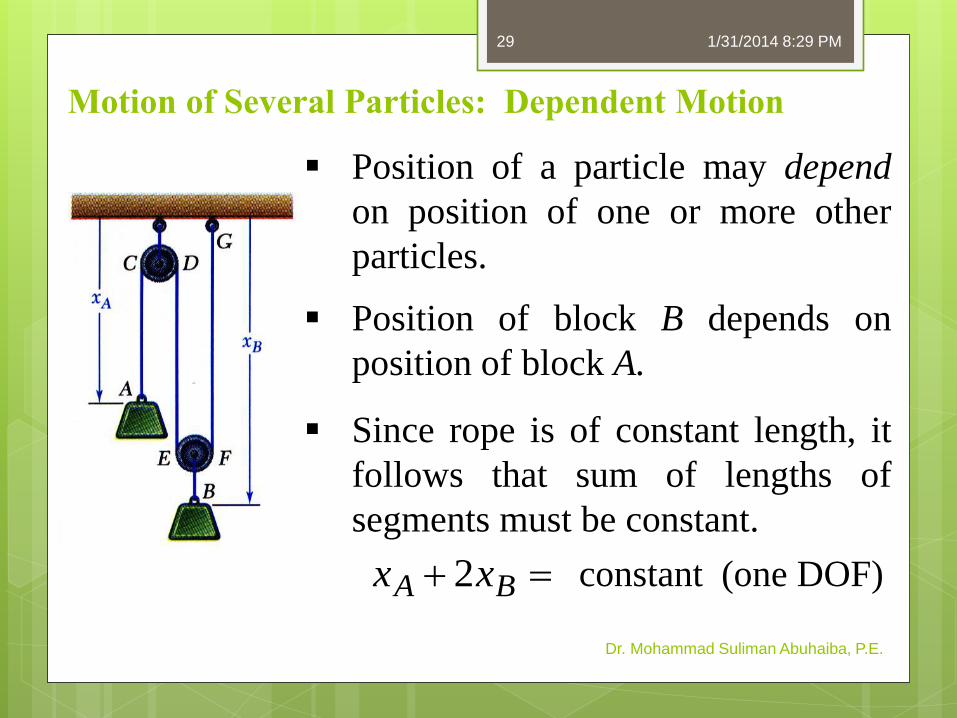
Motion of Several Particles: Dependent Motion
Position of a particle may depend
on position of one or more other
particles.
Position of block B depends on
position of block A.
Since rope is of constant length, it
follows that sum of lengths of
segments must be constant.
BA xx 2 constant (one DOF)
Dr. Mohammad Suliman Abuhaiba, P.E.
29 1/31/2014 8:29 PM
Motion of Several Particles: Dependent Motion
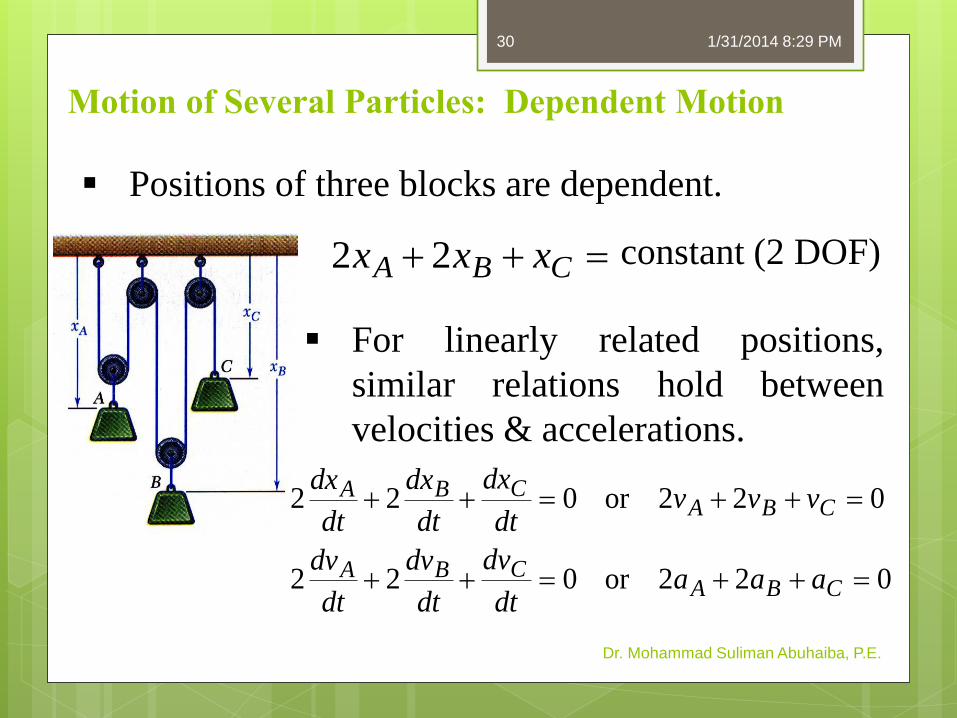
Positions of three blocks are dependent.
CBA xxx 22 constant (2 DOF)
For linearly related positions,
similar relations hold between
velocities & accelerations.
022or022
022or022
CBACBA
CBACBA
aaadt
dv
dt
dv
dt
dv
vvvdt
dx
dt
dx
dt
dx
Dr. Mohammad Suliman Abuhaiba, P.E.
30 1/31/2014 8:29 PM

Sample 11.5 Pulley D is attached to a collar
which is pulled down at 3 cm/s.
At t = 0, collar A starts moving
down from K with constant
acceleration and zero initial
velocity. Knowing that
velocity of collar A is 12 cm/s
as it passes L, determine the
change in elevation, velocity,
and acceleration of block B
when block A is at L.
Dr. Mohammad Suliman Abuhaiba, P.E.
31 1/31/2014 8:29 PM

Solution:
• Define origin at upper horizontal
surface with +ve displacement
downward. • Collar A has uniformly accelerated
rectilinear motion. Solve for
acceleration and time t to reach L.
2
2
020
2
s
cm9cm82
s
cm12
2
AA
AAAAA
aa
xxavv
s 333.1s
cm9
s
cm12
2
0
tt
tavv AAA
Dr. Mohammad Suliman Abuhaiba, P.E.
32
Sample 11.4
1/31/2014 8:29 PM
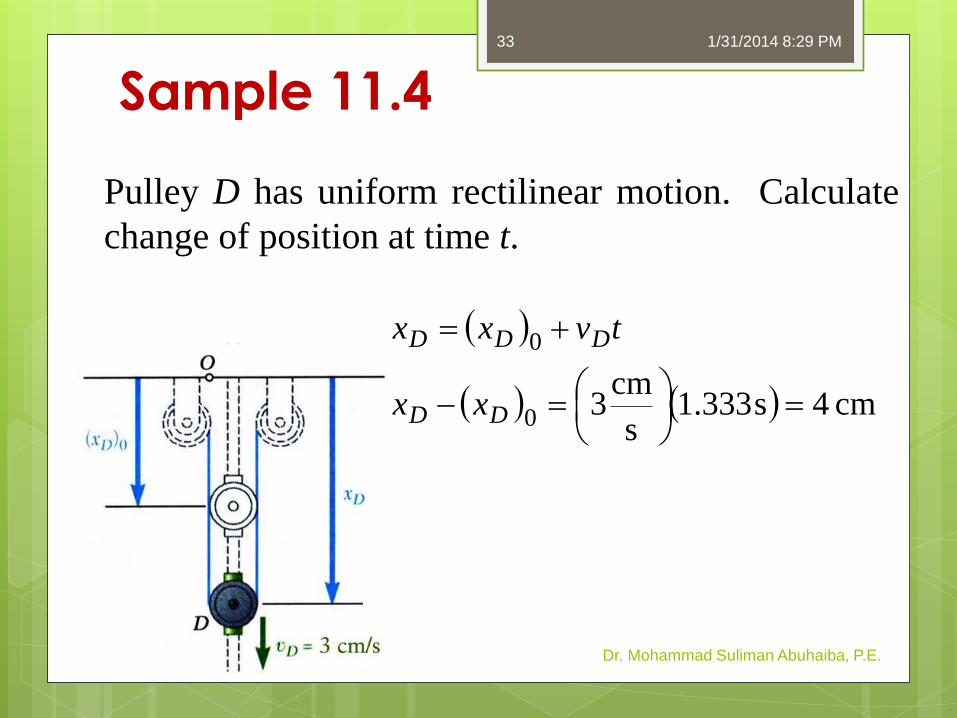
cm 4s333.1s
cm30
0
DD
DDD
xx
tvxx
Pulley D has uniform rectilinear motion. Calculate
change of position at time t.
Dr. Mohammad Suliman Abuhaiba, P.E.
33
Sample 11.4
1/31/2014 8:29 PM

Block B motion is dependent on motions of collar A
& pulley D. Write motion relationship and solve for
change of block B position at time t.
0cm42cm8
02
22
0
000
000
BB
BBDDAA
BDABDA
xx
xxxxxx
xxxxxx
cm
cm
16
16
0
0
BB
BB
xx
xx
Dr. Mohammad Suliman Abuhaiba, P.E.
34
Sample 11.4
1/31/2014 8:29 PM
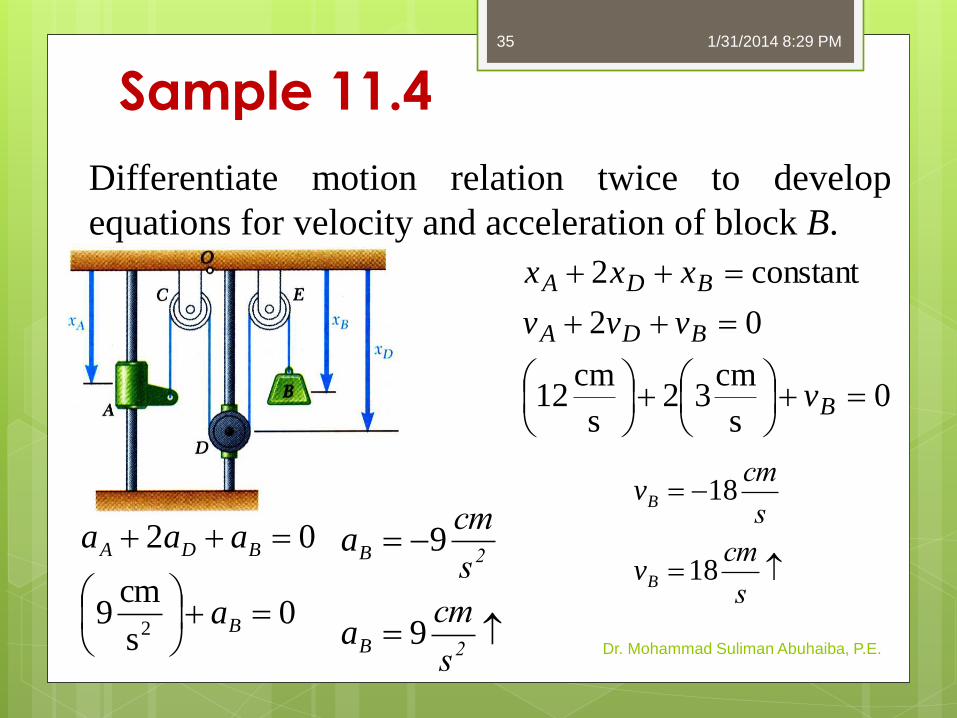
Differentiate motion relation twice to develop
equations for velocity and acceleration of block B.
0s
cm32
s
cm12
02
constant2
B
BDA
BDA
v
vvv
xxx
s
cm
s
cm
18
18
B
B
v
v
0s
cm9
02
2
B
BDA
a
aaa
2
2
s
cm
s
cm
9
9
B
B
a
a
Dr. Mohammad Suliman Abuhaiba, P.E.
35
Sample 11.4
1/31/2014 8:29 PM
Home Work Assignment #11.2
33, 38, 42, 47, 52, 57
Due Tuesday 11/2/2014
Dr. Mohammad Suliman Abuhaiba, P.E.
36 1/31/2014 8:29 PM

• Given x-t curve, v-t curve = x-t curve slope
• Given v-t curve, a-t curve = v-t curve slope
Graphical Solution of
Rectilinear-Motion Problems
Dr. Mohammad Suliman Abuhaiba, P.E.
37 1/31/2014 8:29 PM

Given a-t curve, change in velocity between t1 &
t2 = area under a-t curve between t1 & t2.
Given v-t curve, change in position between t1 &
t2 = area under v-t curve between t1 & t2.
Graphical Solution of
Rectilinear-Motion Problems
Dr. Mohammad Suliman Abuhaiba, P.E.
38 1/31/2014 8:29 PM
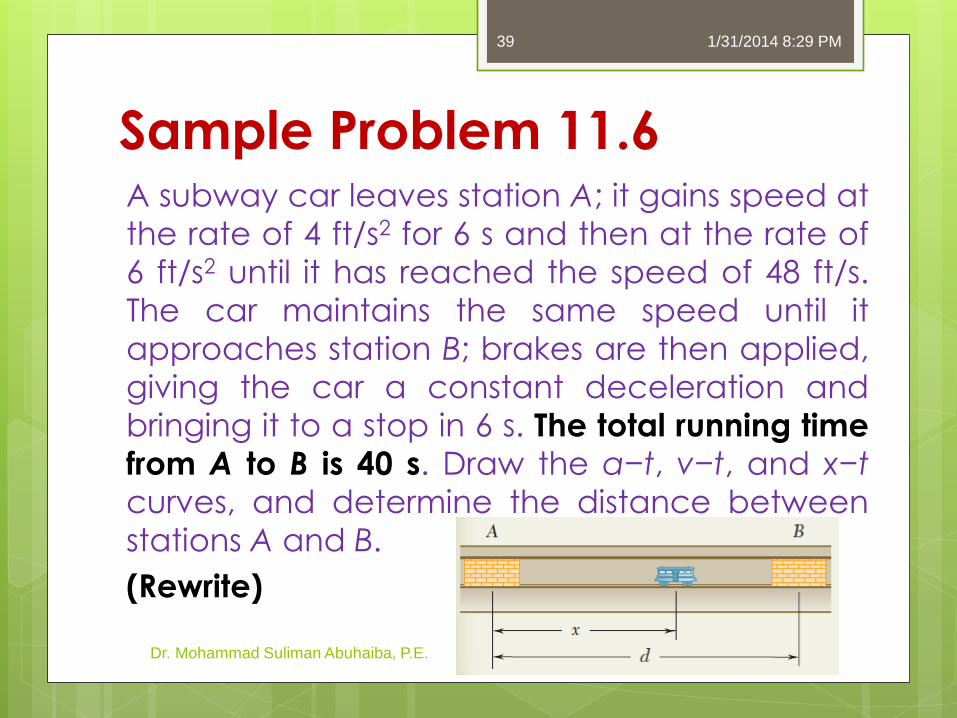
Sample Problem 11.6 A subway car leaves station A; it gains speed at
the rate of 4 ft/s2 for 6 s and then at the rate of
6 ft/s2 until it has reached the speed of 48 ft/s.
The car maintains the same speed until it
approaches station B; brakes are then applied,
giving the car a constant deceleration and
bringing it to a stop in 6 s. The total running time
from A to B is 40 s. Draw the a−t, v−t, and x−t
curves, and determine the distance between
stations A and B.
(Rewrite)
Dr. Mohammad Suliman Abuhaiba, P.E.
39 1/31/2014 8:29 PM
Homework Assignment #11.3
61, 67, 73, 79, 87 Due Sunday 16/2/2014
Dr. Mohammad Suliman Abuhaiba, P.E.
40 1/31/2014 8:29 PM

Curvilinear Motion: Position, Velocity & Acceleration
• Curvilinear motion: Particle moving along a curve
other than a straight line
• Position vector of a particle at time t = a vector
between origin O of a fixed reference frame &
position occupied by particle.
Dr. Mohammad Suliman Abuhaiba, P.E.
41 1/31/2014 8:29 PM
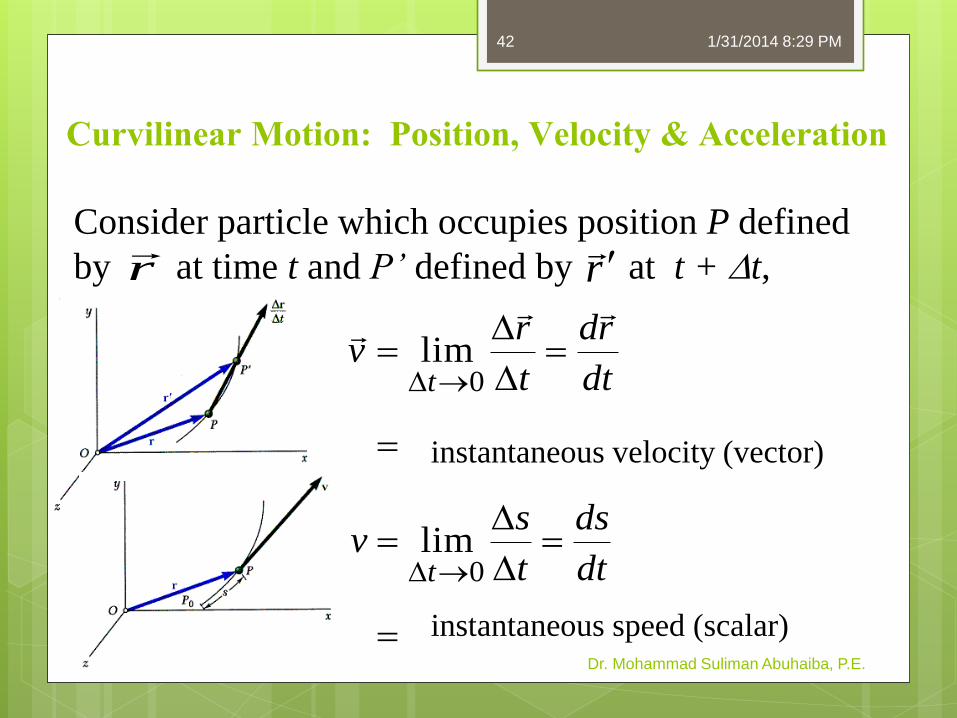
Curvilinear Motion: Position, Velocity & Acceleration
Consider particle which occupies position P defined
by at time t and P’ defined by at t + t, r
r
dt
ds
t
sv
dt
rd
t
rv
t
t
0
0
lim
lim
instantaneous velocity (vector)
instantaneous speed (scalar) Dr. Mohammad Suliman Abuhaiba, P.E.
42 1/31/2014 8:29 PM
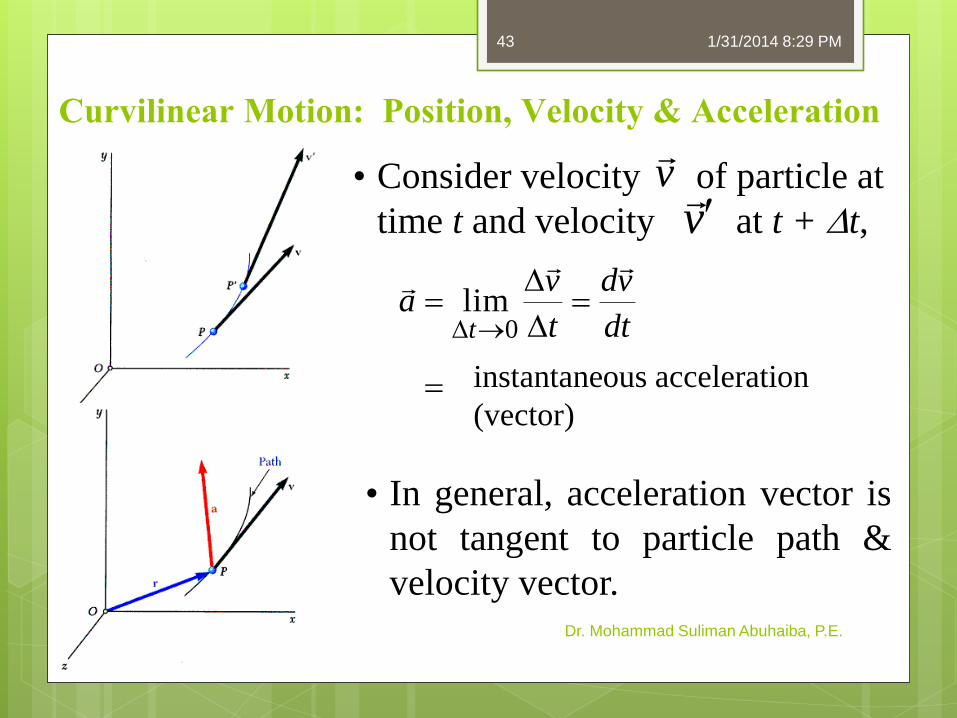
Curvilinear Motion: Position, Velocity & Acceleration
dt
vd
t
va
t
0lim
instantaneous acceleration
(vector)
• Consider velocity of particle at
time t and velocity at t + t,
v
v
• In general, acceleration vector is
not tangent to particle path &
velocity vector. Dr. Mohammad Suliman Abuhaiba, P.E.
43 1/31/2014 8:29 PM
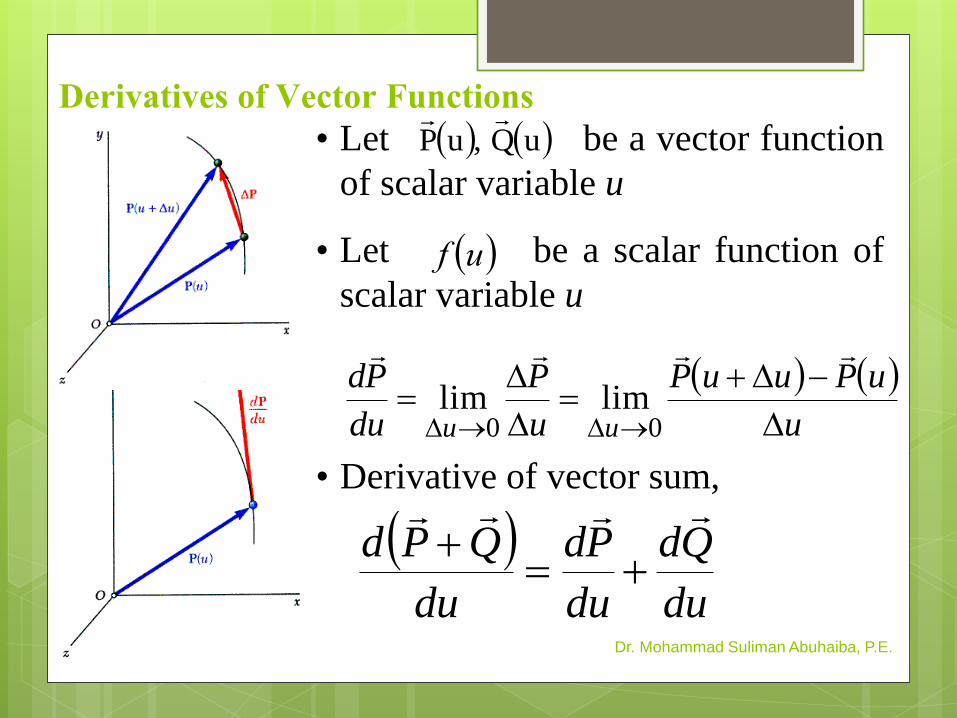
• Let be a vector function
of scalar variable u
• Let be a scalar function of
scalar variable u
Derivatives of Vector Functions uQ,uP
uf
u
uPuuP
u
P
du
Pd
uu
00limlim
• Derivative of vector sum,
du
Qd
du
Pd
du
QPd
Dr. Mohammad Suliman Abuhaiba, P.E.
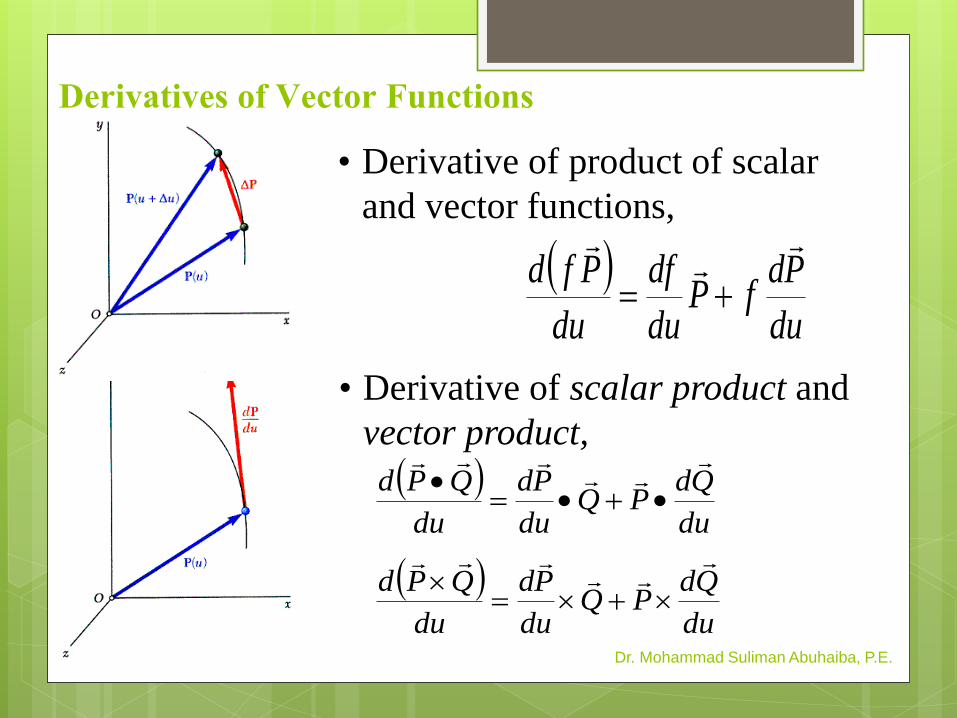
Derivatives of Vector Functions
du
PdfP
du
df
du
Pfd
• Derivative of product of scalar
and vector functions,
• Derivative of scalar product and
vector product,
du
QdPQ
du
Pd
du
QPd
du
QdPQ
du
Pd
du
QPd
Dr. Mohammad Suliman Abuhaiba, P.E.
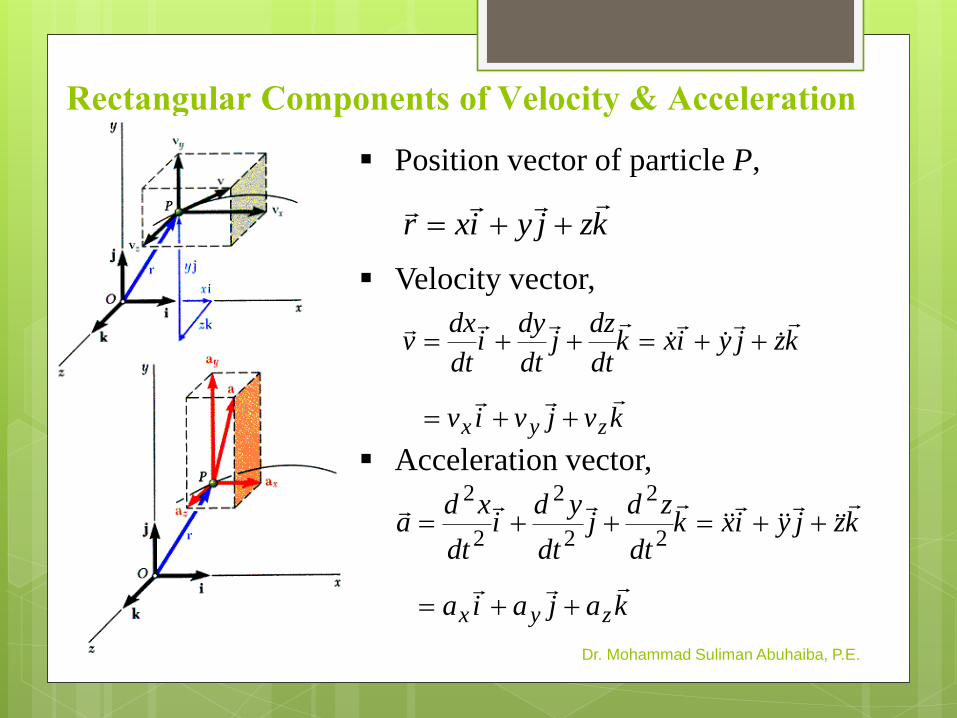
Rectangular Components of Velocity & Acceleration
Position vector of particle P,
kzjyixr
Velocity vector,
kvjviv
kzjyixkdt
dzj
dt
dyi
dt
dxv
zyx
Acceleration vector,
kajaia
kzjyixkdt
zdj
dt
ydi
dt
xda
zyx
2
2
2
2
2
2
Dr. Mohammad Suliman Abuhaiba, P.E.
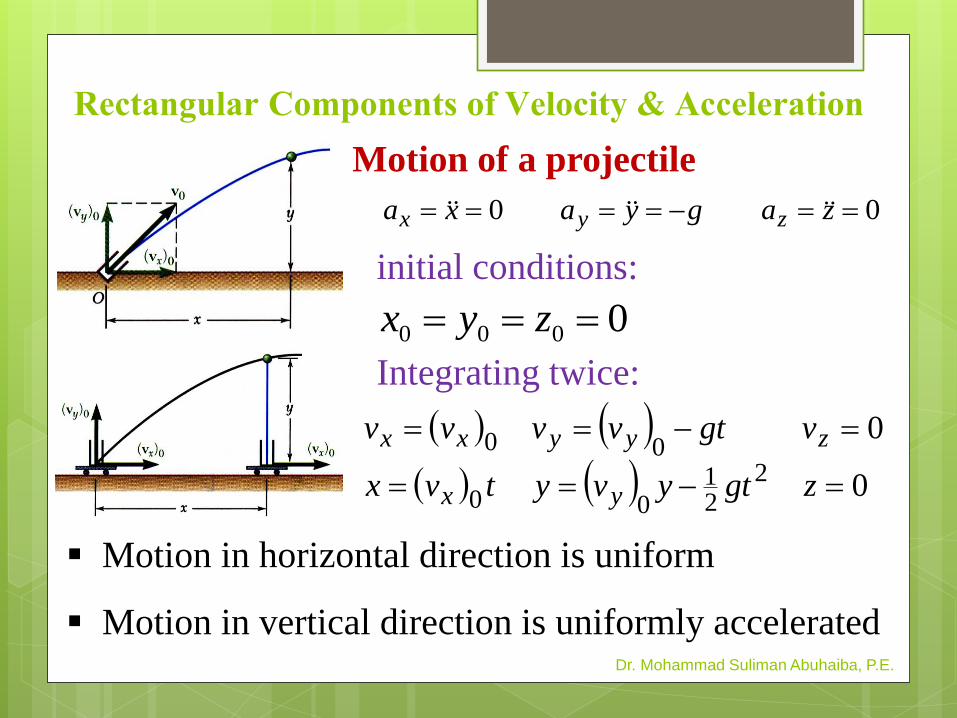
Rectangular Components of Velocity & Acceleration
Motion of a projectile
00 zagyaxa zyx
initial conditions:
0000 zyx
Integrating twice:
0
0
221
00
00
zgtyvytvx
vgtvvvv
yx
zyyxx
Motion in horizontal direction is uniform
Motion in vertical direction is uniformly accelerated
Dr. Mohammad Suliman Abuhaiba, P.E.
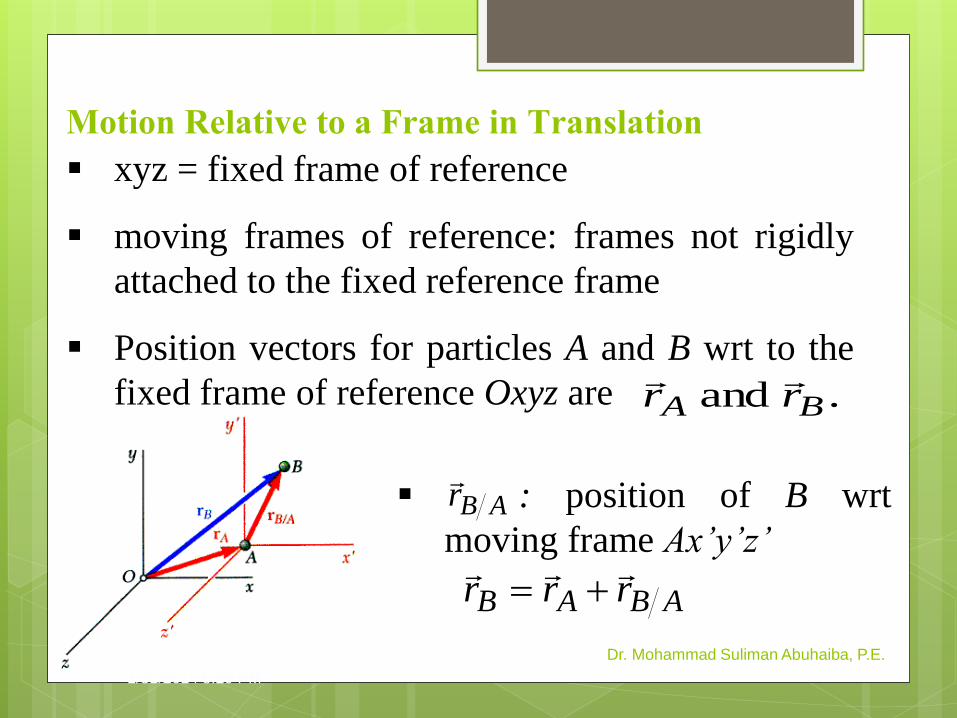
Motion Relative to a Frame in Translation
xyz = fixed frame of reference
moving frames of reference: frames not rigidly
attached to the fixed reference frame
Position vectors for particles A and B wrt to the
fixed frame of reference Oxyz are
: position of B wrt
moving frame Ax’y’z’ ABr
ABAB rrr
Dr. Mohammad Suliman Abuhaiba, P.E.
. and BA rr
1/31/2014 8:29 PM
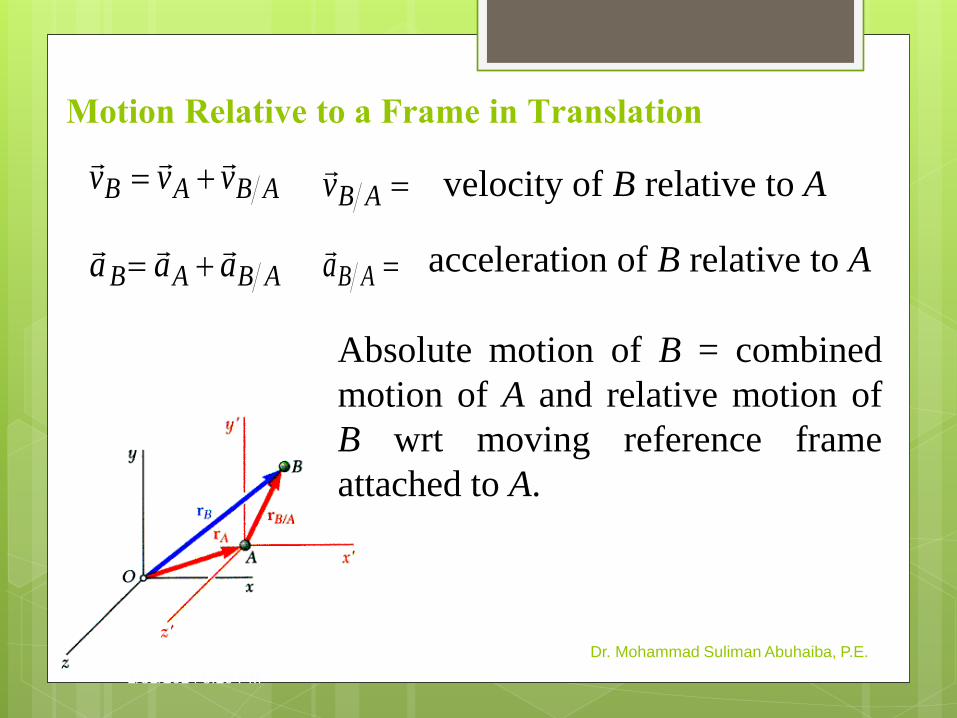
Motion Relative to a Frame in Translation
ABv
velocity of B relative to A ABAB vvv
ABa
acceleration of B relative to A ABAB aaa
Absolute motion of B = combined
motion of A and relative motion of
B wrt moving reference frame
attached to A.
Dr. Mohammad Suliman Abuhaiba, P.E.
1/31/2014 8:29 PM
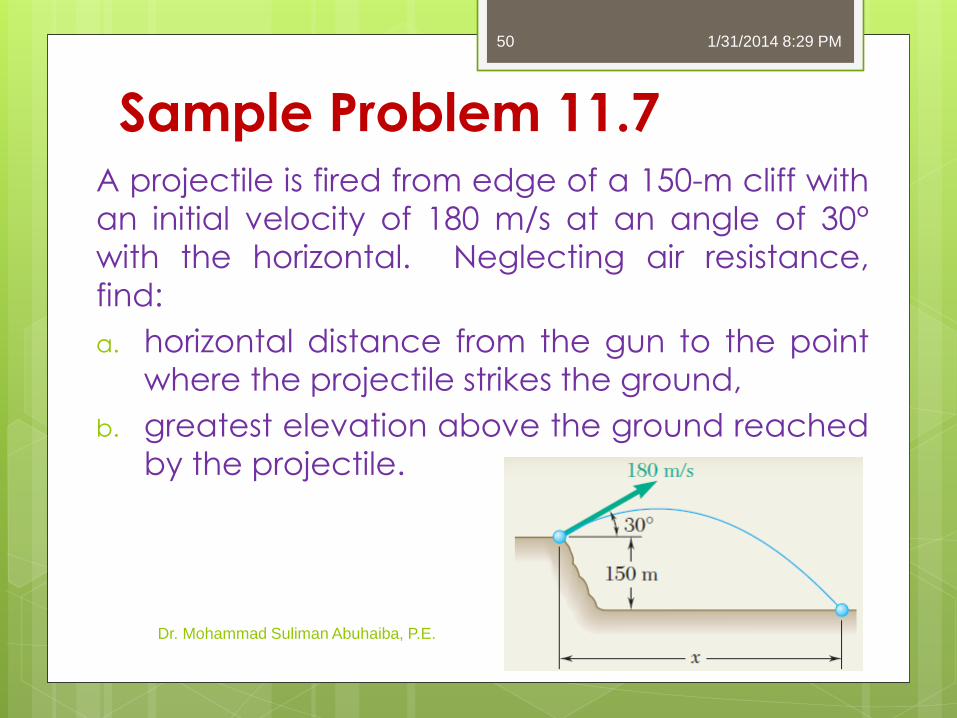
Sample Problem 11.7 A projectile is fired from edge of a 150-m cliff with
an initial velocity of 180 m/s at an angle of 30°
with the horizontal. Neglecting air resistance,
find:
a. horizontal distance from the gun to the point
where the projectile strikes the ground,
b. greatest elevation above the ground reached
by the projectile.
1/31/2014 8:29 PM
Dr. Mohammad Suliman Abuhaiba, P.E.
50
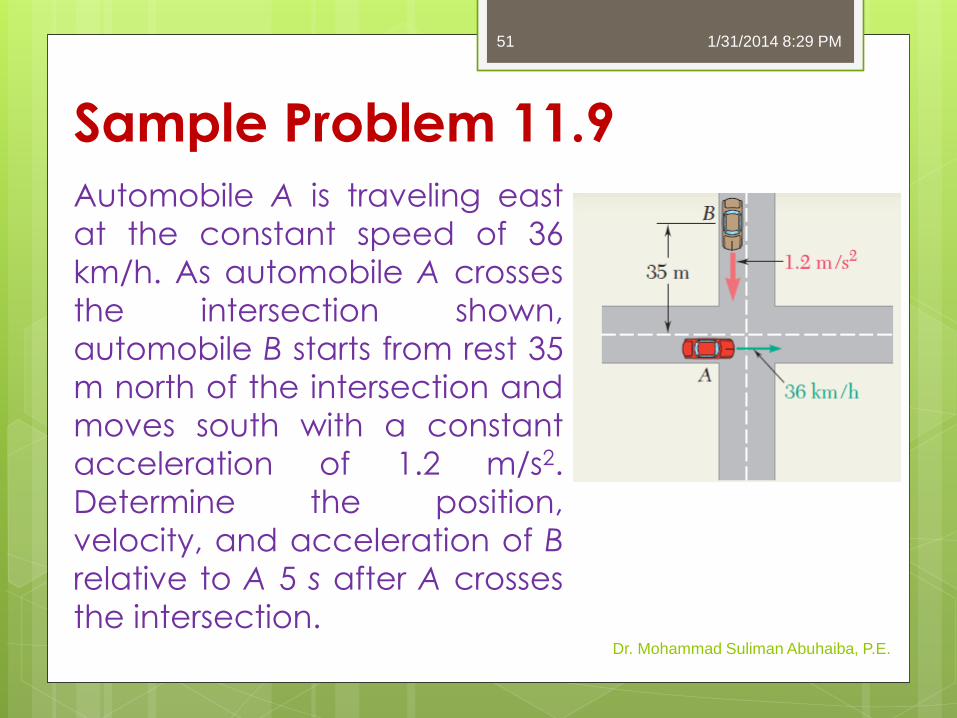
Sample Problem 11.9
Automobile A is traveling east
at the constant speed of 36
km/h. As automobile A crosses
the intersection shown,
automobile B starts from rest 35
m north of the intersection and
moves south with a constant
acceleration of 1.2 m/s2.
Determine the position,
velocity, and acceleration of B
relative to A 5 s after A crosses
the intersection.
1/31/2014 8:29 PM
Dr. Mohammad Suliman Abuhaiba, P.E.
51
Homework Assignment #11.4
89, 95, 101, 107, 113, 120, 126
Due Tuesday 18/2/2014
Dr. Mohammad Suliman Abuhaiba, P.E.
52 1/31/2014 8:29 PM

Tangential and Normal Components Velocity vector is tangent to path.
Generally, acceleration vector is
not.
= tangential unit
vectors for particle path at P &
P’
tt ee and
ttt eee
d
ede
eee
e
tn
nnt
t
2
2sinlimlim
2sin2
00
Dr. Mohammad Suliman Abuhaiba, P.E.
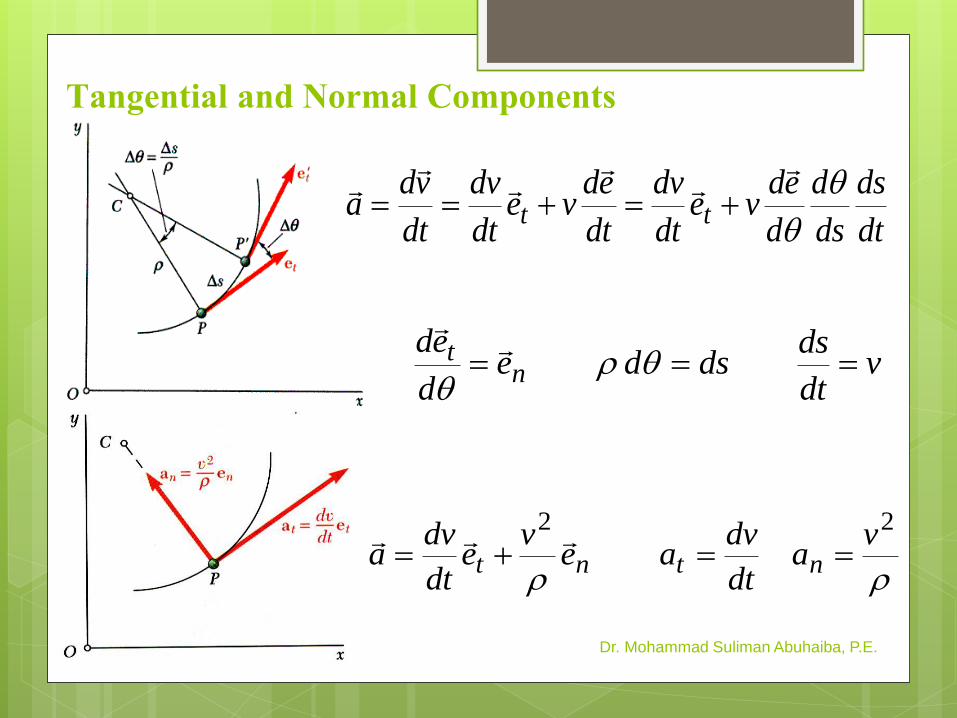
Tangential and Normal Components
dt
ds
ds
d
d
edve
dt
dv
dt
edve
dt
dv
dt
vda tt
22 va
dt
dvae
ve
dt
dva ntnt
vdt
dsdsde
d
edn
t
Dr. Mohammad Suliman Abuhaiba, P.E.
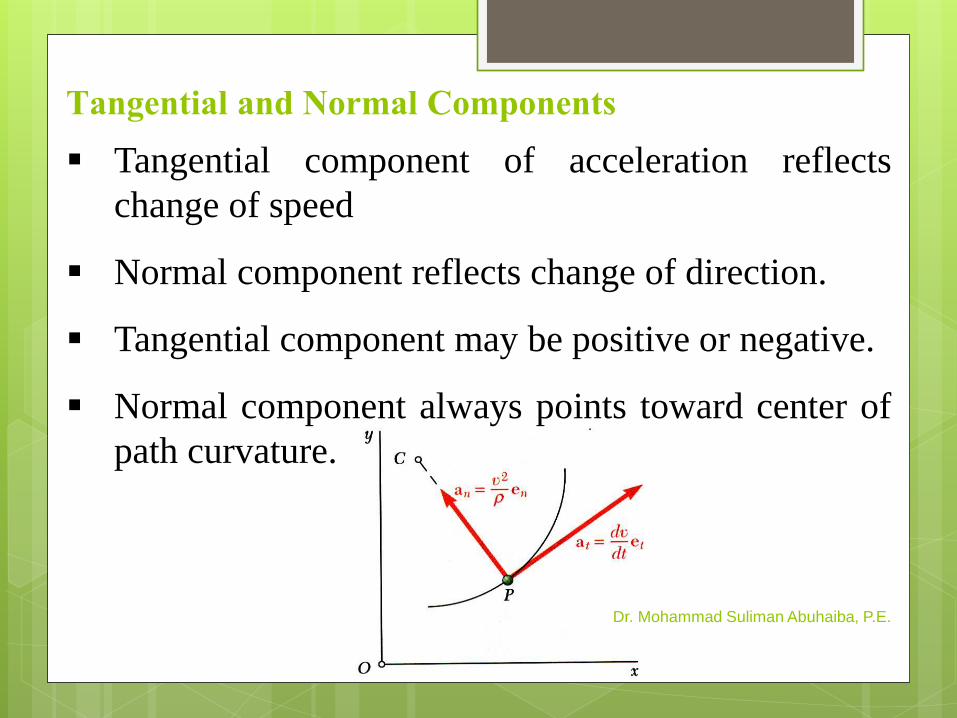
Tangential and Normal Components Tangential component of acceleration reflects
change of speed
Normal component reflects change of direction.
Tangential component may be positive or negative.
Normal component always points toward center of
path curvature.
Dr. Mohammad Suliman Abuhaiba, P.E.

Tangential and Normal Components
22 va
dt
dvae
ve
dt
dva ntnt
Relations for tangential & normal acceleration
also apply for particle moving along space curve.
Osculating plane: Plane containing
tangential & normal unit vectors
ntb eee
binormale
normalprincipal e
b
n
No Acceleration component along
binormal. Dr. Mohammad Suliman Abuhaiba, P.E.
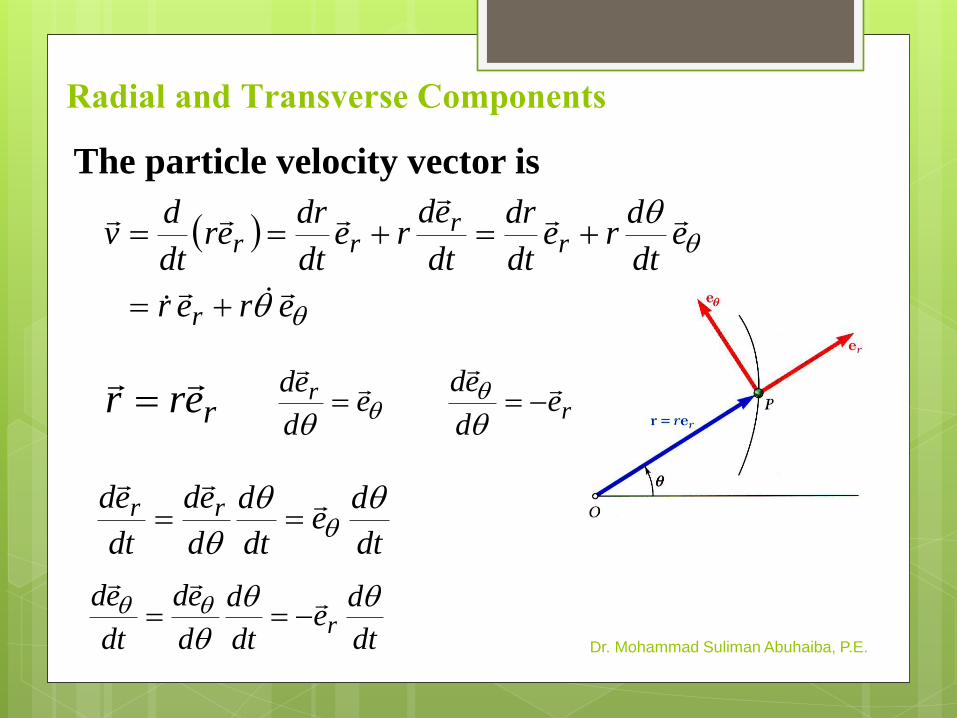
Radial and Transverse Components
rr e
d
ede
d
ed
dt
de
dt
d
d
ed
dt
ed rr
dt
de
dt
d
d
ed
dt
edr
erer
edt
dre
dt
dr
dt
edre
dt
drer
dt
dv
r
rr
rr
The particle velocity vector is
rerr
Dr. Mohammad Suliman Abuhaiba, P.E.

Radial and Transverse Components
The particle acceleration vector is
errerr
dt
ed
dt
dre
dt
dre
dt
d
dt
dr
dt
ed
dt
dre
dt
rd
edt
dre
dt
dr
dt
da
r
rr
r
22
2
2
2
2
Dr. Mohammad Suliman Abuhaiba, P.E.

Radial and Transverse Components – 3D
• Position vector,
kzeRr R
• Velocity vector,
kzeReRdt
rdv R
• Acceleration vector,
kzeRReRRdt
vda R
22
Dr. Mohammad Suliman Abuhaiba, P.E.

Sample 11.10
A motorist is traveling on
curved section of highway at 88
m/s. The motorist applies
brakes causing a constant
deceleration rate.
Knowing that after 8 s the speed
has been reduced to 66 m/s,
determine the acceleration of
the automobile immediately
after the brakes are applied.
Dr. Mohammad Suliman Abuhaiba, P.E.
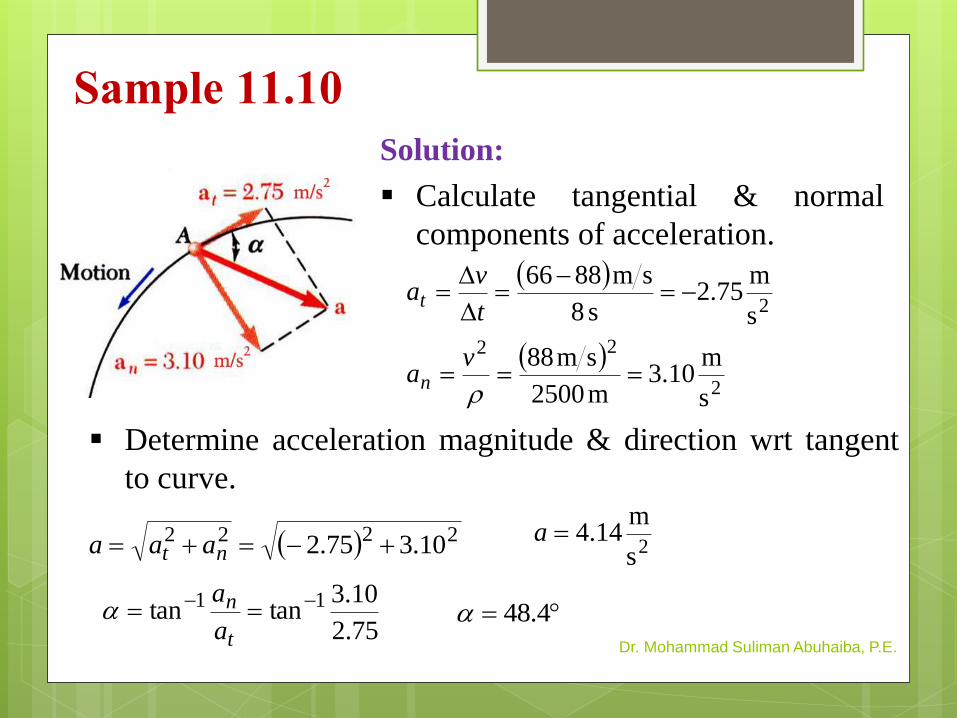
Solution:
Calculate tangential & normal
components of acceleration.
2
22
2
s
m10.3
m2500
sm88
s
m75.2
s 8
sm8866
va
t
va
n
t
Determine acceleration magnitude & direction wrt tangent
to curve.
2222 10.375.2 nt aaa 2s
m14.4a
75.2
10.3tantan 11
t
n
a
a 4.48
Dr. Mohammad Suliman Abuhaiba, P.E.
Sample 11.10
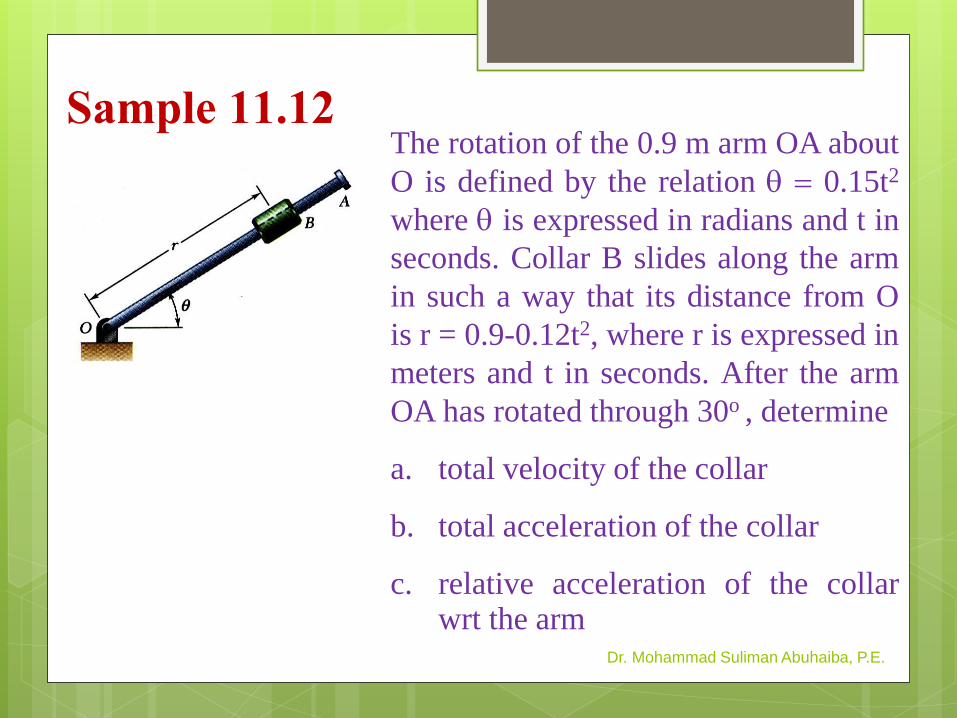
Sample 11.12 The rotation of the 0.9 m arm OA about
O is defined by the relation 0.15t2
where is expressed in radians and t in
seconds. Collar B slides along the arm
in such a way that its distance from O
is r = 0.9-0.12t2, where r is expressed in
meters and t in seconds. After the arm
OA has rotated through 30o , determine
a. total velocity of the collar
b. total acceleration of the collar
c. relative acceleration of the collar wrt the arm
Dr. Mohammad Suliman Abuhaiba, P.E.
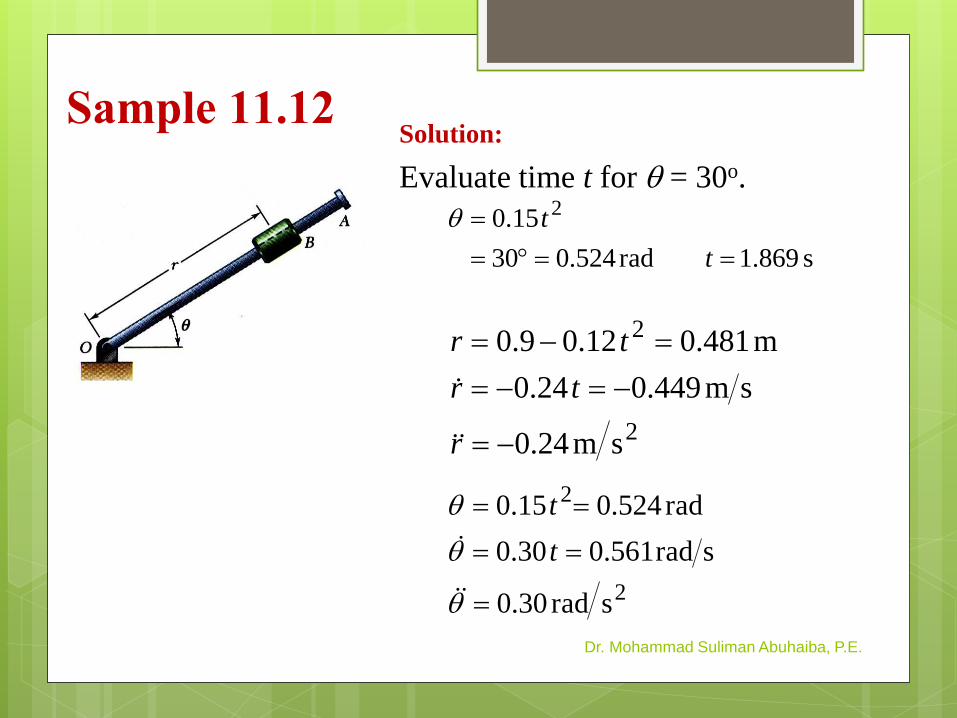
Solution:
Evaluate time t for = 30o.
s 869.1rad524.030
0.15 2
t
t
2
2
sm24.0
sm449.024.0
m 481.012.09.0
r
tr
tr
2
2
srad30.0
srad561.030.0
rad524.015.0
t
t
Dr. Mohammad Suliman Abuhaiba, P.E.
Sample 11.12
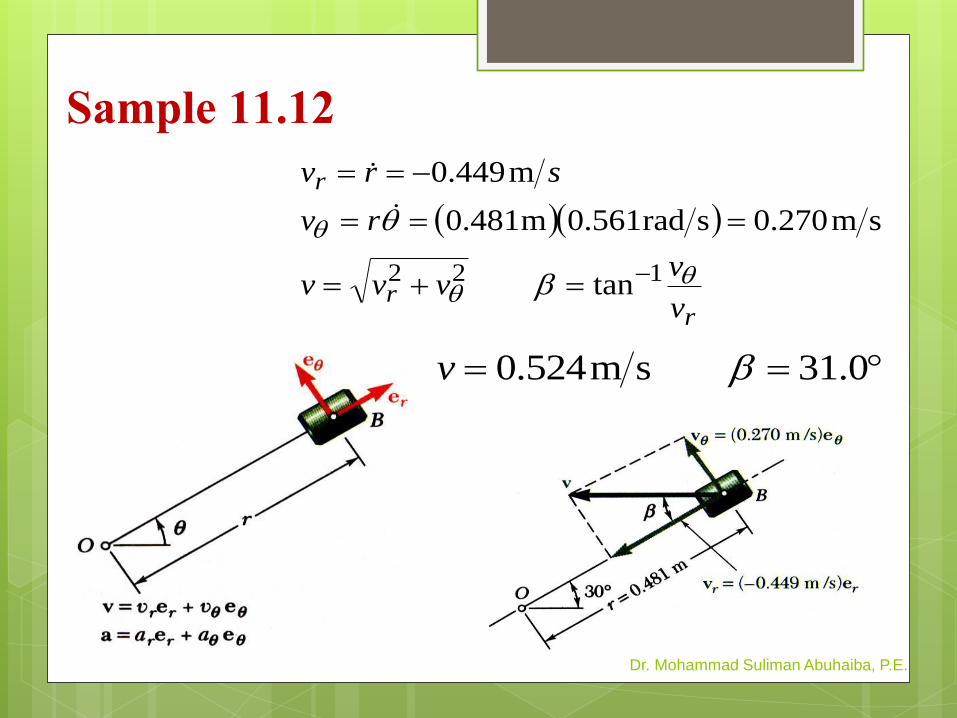
rr
r
v
vvvv
rv
srv
122 tan
sm270.0srad561.0m481.0
m449.0
0.31sm524.0 v
Dr. Mohammad Suliman Abuhaiba, P.E.
Sample 11.12
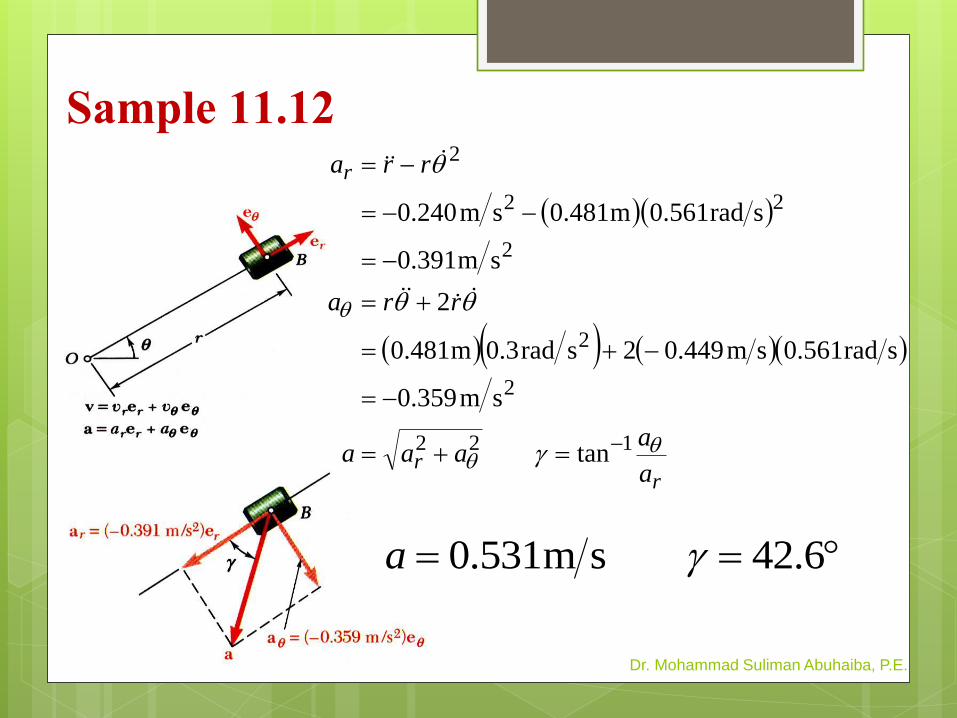
rr
r
a
aaaa
rra
rra
122
2
2
2
22
2
tan
sm359.0
srad561.0sm449.02srad3.0m481.0
2
sm391.0
srad561.0m481.0sm240.0
6.42sm531.0 a
Dr. Mohammad Suliman Abuhaiba, P.E.
Sample 11.12
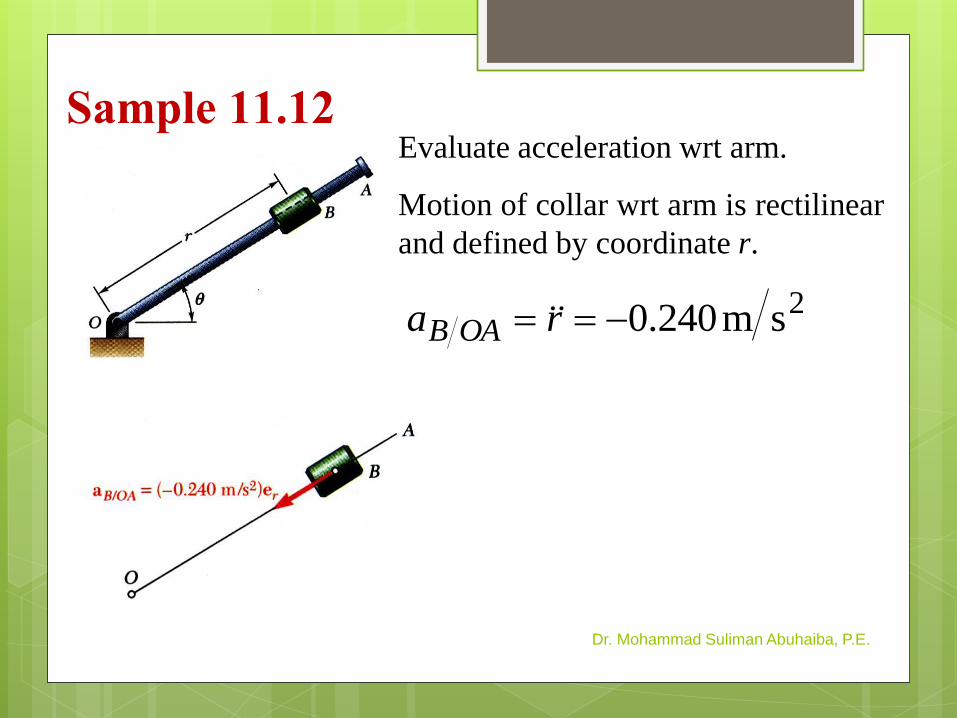
Evaluate acceleration wrt arm.
Motion of collar wrt arm is rectilinear
and defined by coordinate r.
2sm240.0 ra OAB
Dr. Mohammad Suliman Abuhaiba, P.E.
Sample 11.12

Howe Work Assignment #11.5
133, 140, 146, 153, 160, 167, 173
Due Sunday 23/2/2014
Dr. Mohammad Suliman Abuhaiba, P.E.
67 1/31/2014 8:29 PM


















![KINEMATICS - new.excellencia.co.innew.excellencia.co.in/college/web/pdf/Kinematics-merged.pdf · KINEMATICS KINEMATICS WORKSHEET 1 1) Displacement is a _____ [ ] 1) Vector quantity](https://img.dokumen.tips/doc/110x75/5f356d4687229051801abace/kinematics-new-kinematics-kinematics-worksheet-1-1-displacement-is-a-.jpg)