Embed Size (px)
Citation preview

Channel Modeling and Analysis for Molecular Motors in
Nano-scale Communications
Youssef Chahibi⇤
School of Electrical and Computer EngineeringGeorgia Institute of Technology
Atlanta, USA
Ilangko Balasingham†
Department of Electronics andTelecommunications
Norwegian University of Science and Technology&
Intervention CenterOslo University Hospital
&Institute of Clinical Medicine
University of Oslo
ABSTRACTMolecular motor communication (MMC) is a class of walk-way based molecular communication, which is realized thr-ough motor proteins. In MMC, chemical energy is convertedinto the mechanical transport of molecules on cellular tracksnamed microtubules. In this paper, a channel propaga-tion model of MMC nanonetworks is proposed, capturingthe stochastic nature of molecular motors, transport bidi-rectionality, chemical energy conversion, and the topologyof microtubules. Closed-form expressions of the probabilityof presence, delay, and attenuation are derived. The resultsare validated against Markov Chain Monte-Carlo simula-tions. Unlike di↵usion-based and flow-based communica-tion, MMC is active, low-delay, bidirectional, controllable,and can carry significantly large molecules. These charac-teristics make MMC an ideal candidate for realizing nano-networks.
1. INTRODUCTIONMolecular motors are biological nanomachines that enable
living organisms to perform e�cient mechanical work, in-
⇤Youssef Chahibi is with the Broadband Wireless Net-working Laboratory at the Georgia Institute of Technol-ogy, School of Electrical and Computer Engineering. Thework of Youssef Chahibi is conducted during his stay atthe Biomedical Sensor Network Research Group at the Nor-wegian University of Science and Technology (NTNU), In-stitute of Mathematics and Electronics during 2014-2015.Email: [email protected].†Ilangko Balasingham is with the Biomedical Sensor Net-work Research Group at the Norwegian University of Sci-ence and Technology (NTNU), Institute of Mathematics andElectronics, the Intervention Center at the Oslo UniversityHospital, and the Institute of Clinical Medicine, Universityof Oslo. Email: [email protected].
Permission to make digital or hard copies of all or part of this work for
personal or classroom use is granted without fee provided that copies are
not made or distributed for profit or commercial advantage and that copies
bear this notice and the full citation on the first page. To copy otherwise, to
republish, to post on servers or to redistribute to lists, requires prior specific
permission and/or a fee.
NANOCOM’15, September 21 - 22, 2015, Boston, MA, USA
Copyright 2015 ACM 978-1-4503-3674-1/15/09 ...$15.00.
http://dx.doi.org/10.1145/2800795.2800813.
β+β−
α α
−ν ν Forward motion state
Backward motion state
Detachment state
ATP
ATP ATP
ATP
ATP
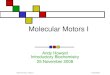
Figure 1: State representation of molecular motors
motion.
cluding muscle contraction and the intracellular cargo trans-port [10]. In particular, kinesin and dynein are two impor-tant motor proteins enabling the intracellular cargo trans-port towards and away from the cell nucleus, respectively.They convert energy in the form of adenosine triphosphate(ATP) to transport large molecules inside a cell betweendi↵erent organelles and vesicles.
Molecular motor communication (MMC) is a type of walk-way based molecular communication [1] mechanisms. MMCalso underlies other walkway based molecular communica-tion mechanisms such as chemotaxis by controlling the flag-ellum motor and neuron communication [6] by transportinglarge molecules along the axons of a neuron cell. Di↵usion-based molecular communication [9] is not fast enough totransport molecules for distances larger than a µm. In addi-tion, di↵usion-based molecular communication cannot hap-pen against the concentration gradient in the medium. Sim-ilarly, flow-based communication [2] cannot occur againstthe flow direction. MMC does not have this limitation.In fact, molecular motors can transport molecules in non-equilibrium mediums, regardless of the concentration gradi-ent, by using chemical energy (e.g. in the form of ATP) toproduce a mechanical movement in a similar way to an autoengine. The ability to control the motion of molecular mo-tors using molecular switches [3] makes MMC a promisingsolution to realize nanonetworks.

Unlike macro-scale motors, molecular motors are highlystochastic in nature. MMC has been conceptually consid-ered as a molecular communication mechanism in [11]. In [7],MMC using microtubule transport over kinesin-coated sur-faces has been simulated based on a mobility model thatassumes a drift velocity and a Brownian motion di↵usivityof the microtubule calculated empirically from experimen-tal observations. In reality, the drift velocity and di↵usivityare highly coupled. Moreover, molecular motors often de-tach from their track and di↵use freely along the track. Inthis paper, an analytical model and performance analysisof MMC channel propagation is derived based on the mo-bility parameters (backward motion, forward motion, anddetachment) of the molecular motor protein (kinesin anddynein) moving along a microtubule cf. Fig. 1). The chan-nel delay and attenuation over a microtubule are expressedas closed-form expressions of the propagation distance andthe mobility parameters. In addition, the channel propaga-tion model considers di↵erent boundary conditions at theextremity of the MMC nanonetwork such as absorbing andreflecting ends. The results are validated by comparisonwith Markov Chain Monte-Carlo simulations [4].
Molecular motors are involved in several diseases and ther-apeutic methods. In fact, several brain conditions such asParkinson’s and Alzheimer are associated to jamming inmicrotubules. Molecular motors signaling is important forfinding methods to trigger the death of diseased cells. Thestudy of molecular motors has intrigued the scientific com-munity, especially that they are di�cult to observe, and themore advances in cell imaging develop, the more complexthe mechanisms underlying molecular motors are revealedto be [5].
The paper is organized as follows. In Section. 2, the chan-nel model based on the kinetics of molecular motor transportis presented. In Section. 3, the closed-form expressions ofdelay and attenuation are derived. In Section. 4, numericalresults stemming from the channel model and the expres-sions of delay and attenuation are presented and discussed.Finally, Section 5 concludes the paper.
2. PROPAGATION CHANNEL MODELIn this section, the propagation channel modeling is de-
rived by describing the elements of the molecular communi-cation abstraction of molecular motor nanonetworks.
2.1 System AbstractionThe nanonetworks abstraction of molecular motors mod-
els the network of microtubules (cytoskeleton) as a MC net-work composed of the following elements:
• MC transmitter (cargo production) which correspondsthe location where the cargo transported by the molec-ular motor is produced and loaded into a kinesin ordyein protein. The location can be an organelle, avesicle, or a the nucleus of the cell. The direction ofthe motion is determined by the transporting motorprotein (kinesin or dyein).
• MC links (microtubules) which are the molecular trackswhere the motor protein are traveling. Typically, theirtopology is star-shaped, and can span distances of theorder of the µm.
0 5 10 15 20 250
2
4
6
8
10
12
14
Delay t [s ]
Impulsere
sponse
h(x
=500nm,t)
α = 5 s−1
α = 10 s−1
α = 15 s−1
α = 20 s−1
α = 25 s−1
Figure 2: Probability of presence of a molecular mo-
tor channel for various detachment rates ↵.
• MC signal (cargo) The molecular motor can transportlarge molecules ten-fold faster than di↵usion alone.The cargo can encapsulate an MC signal, for exam-ple, as a sequence of amino-acids.
• MC receiver (cargo detection) which corresponds tothe location where the cargo is delivered and detectedby another part of the cell, such as a vesicle, organelle,or nucleus. The reception can be either by detectionor by consumption of the cargo.
The channel model is based on the experimental obser-vations regarding the biophysics of protein transport insidethe cell. It has been observed in [8], that molecular motorsundergo the stochastic transitions between di↵erent motionstates, namely the backward motion state, the detachmentstate, and the forward motion state with di↵erent rates ��,↵, and �+, respectively. As shown in Figure 1, the molecularmotor moves with a speed �⌫ in the backward motion state,with a speed 0 at the detachment state, and with a speed ⌫
at the forward motion state. The speed ⌫ is a function ofthe chemical energy as follows [8]
⌫ =⌫maxcATP
cATP +K⌫, (1)
where ⌫max is the maximum speed, and K⌫ is the saturationconstant of ATP conversion, and cATP is the ATP concen-tration.
2.2 Link ModelsUsing the Fokker-Planck reduction of linear reaction-hyperbolic
equations, we can find that the probability of presence h(x, t)of a molecular motor is governed by the following equation
@h(x, t)@t
= V
@h(x, t)@x
+D
@
2h(x, t)@x
2, (2)
where x is the spatial coordinate and t is the time variable.

Figure 3: Influence of the backward and forward mo-
tion rates on the spatial and temporal distribution
of molecular motors.
V is the drift term, expressed as
V =1�
✓1b�
� 1b+
◆. (3)
D is the di↵usion term, expressed as
D = "
(1� V )2
�b
2�+
(1 + V )2
�b
2+
�, (4)
with the transition rates given by8><
>:
b+ = ⌘�+ ,
b� = ⌘�� ,
a = ⌘↵ .
(5)
The normalization variable � and the non-dimensionalizingcoe�cient is ⌘ as follows
(� = 1
b++ 1
b�+ 1
a,
⌘ = ✏l⌫,
(6)
where ✏ ⌧ 1 and l is the characteristic size of the target area.The equations (3) and (4) show the coupling between thedrift and the di↵usion terms through the transitions rates ofthe molecular motor motion. This coupling is shown in Fig-ure 3 where the probability of presence h(x, t) is calculatedfor various values of the backward and forward motion rates,and in Figure 2, where it is calculated for di↵erent values ofthe detachment rate. Molecular motor tracks are intercon-nected as a network and can be terminated with open ends,reflecting ends, and absorbing ends as shown in Figure 4. Wesolve (2) for these di↵erent boundary conditions, by findingthe probability of presences hO(x, t), hA(x, t), and hR(x, t),respectively, as follows:
• Open end channel :
hO(x, t) =e
� x
2
4Dt
+ V
2D (x�V t)
p4⇡Dt
(7)
Reflecting membrane
Target position
Microtubule branch
Microtubule junction
Start position
Microtubule
Molecular cargo
Cytoplasm*
Absorbing end
Figure 4: Molecular motors traveling in a network
of microtubules.
Reflecting membrane
Target position
Start position
Cytoplasm*
x = 0
hO (x,t)MC link (open ended)
hA (x,t)MC link
(with absorbing end)
MC Reception MC Transmission
hR (x,t)MC link
(with reflecting end)
Figure 5: Nanonetworks abstraction of molecular
motors propagation.
• Absorbing end channel :
hA(x, t) =
0
@ e
� x
2
4Dt
p4⇡Dt
� e
� (2xA
�x)2
4Dt
p4⇡Dt
1
Ae
V
2D (x�V t),
(8)with xA the coordinate of the absorbing end.
• Reflecting end channel :
hR(x, t) =
0
@ e
� x
2
4Dt
p4⇡Dt
+e
� (2xR
�x)2
4Dt
p4⇡Dt
1
Ae
V
2D (x�V t),
(9)with xR the coordinate of the reflecting end.
3. PERFORMANCE ANALYSISIn this section, the delay and attenuation of the MMC are
derived as a closed-form expression of the parameters of themolecular motor mobility and the propagation distance.

Table 1: Numerical values of the molecular motor
model.
Parameter Value
Forward motion rate �+ 10 s
�1
Reverse motion rate �� 100 s
�1
Detachment rate ↵ 1 s
�1
Absorption rate 0.05 s
�1
Speed ⌫max 0.1 µms
�1
ATP concentration cATP 40 µM
ATP saturation constant K⌫ 79.23 µM
Receiver length l 1 µm
Number of molecular motors Nm 30,000Spatial averaging distance dx 0.045 nm
Non-dimensionalizing coe�cient ✏ 0.1
0 500 1000 1500 20000
1
2
3
4
5
6
7
8
9
10x 10
11
Distance x [nm ]
Impulsere
sponse
h(x
,t)
Monte-Carlo t = 1 sClosed-form t = 1 sMonte-Carlo t = 2 sClosed-form t = 2 sMonte-Carlo t = 3 sClosed-form t = 3 s
Figure 6: Comparison between the closed-form
channel probability of presence expression and
Markov chain Monte-Carlo simulations of the molec-
ular motors motion.
3.1 DelayThe delay is defined as the time required by a molecular
motor to reach its peak probability of presence in a coordi-nate x, as follows:
⌧(x) = argmaxt
{h(x, t)} . (10)
Based on (7), by taking the first derivation of h(x, t) equalto zero, we find that the delay is expressed as follows:
⌧(x) =l
⌫
pD
2 + V
2x
2 �D
V
2, (11)
where l is the characteristic length of the molecular motormotion and ⌫ is the speed of the molecular motor in for-ward motion. Due to the linear nature of the Fokker-Planckequation of MMC, the delay for a cascade of links can becalculated by the sum of the delays for each link.
3.2 Attenuation
The attenuation is defined as the peak probability of pres-ence in the dB scale as follows:
A(x) = maxt
{10 log10 (h(x, t))} . (12)
Based on (7) and (11), we find that the attenuation is ex-pressed as follows:
A(x) = 10 log10
0
BBBB@V
D
expV x
D
�q
1+(V x
D
)2
2s
4⇡
✓q1 +
�V xD
�2 � 1
◆
1
CCCCA. (13)
Therefore, we have
A(x) = 10 log10
✓V
D
◆� 5 log10
0
@s
1 +
✓V x
D
◆2
� 1
1
A
+5
ln(10)
0
@V x
D
�
s
1 +
✓V x
D
◆21
A� 5 log10 (4⇡) .
(14)
Due to the linear nature of the Fokker-Planck equationof MMC, the attenuation for a cascade of links can be cal-culated by the sum of the attenuations for each link. Also,we notice that a critical parameter of the attenuation is theratio between the drift term and the di↵usion term. Tothe best of our knowledge, this is the first work to providean expression of delay and attenuation for molecular motortransport.
4. NUMERICAL RESULTS
4.1 Monte-Carlo SimulationFigure 6 compares the closed-form MMC probability of
presence h(x, t) with the histogram of the position of a molec-ular motor. The simulation parameters are listed in Ta-ble 1. The simulation environment consisted is based onthe Markov Chain Monte-Carlo [4] method, where a numberof molecular motors Nm is placed at the initial coordinatex = 0, and the motion of each molecular motor is dictated bya coin toss according to the transition diagram shown in Fig-ure 8. Depending on this random outcome, the molecularmotor either moves backward by a distance �⌫dt, forwardby a distance ⌫dt, or remains in a still position, where dt
is the time increment of the simulation. The coin tossing isrepeated until the end of the desired simulation time T isattained.
Finally, the probability of presence is estimated by eval-uation the histogram of the positions of the Nm molecularmotors, with a spatial averaging distance dx, and comparedwith the analytical solution of the Fokker-Planck equation.The closed-form and simulated probabilities of presence ma-tch favorably. We notice that contrary to di↵usion trans-port, the noise, defined as the variance of the position of themolecular motors, seems to reduce as the distance increases,and that the noise remains very high compared with thehigh number of molecular motors Nm on which the resultshave been ensemble averaged.

0 0.2 0.4 0.6 0.8 10
1
2
3
4
5
6
7
Distance x [nm ]
Delayt[s]
Closed form α = 5 s−1
Simulated α = 5 s−1
Closed form α = 15 s−1
Simulated α = 15 s−1
Closed form α = 25 s−1
Simulated α = 25 s−1
(a) Small-scale regime (x < 1 nm).
0 200 400 600 800 10000
5
10
15
20
25
30
35
Distance x [nm ]
Delayt[s]
Closed form α = 5 s−1
Simulated α = 5 s−1
Closed form α = 15 s−1
Simulated α = 15 s−1
Closed form α = 25 s−1
Simulated α = 25 s−1
(b) Large-scale regime (x > 1 nm).
Figure 7: Molecular motor channel delay for dif-
ferent detachment rates ↵ exhibiting a small-scale
regime for (x < 1 nm) and a large-scale regime for
(x > 1 nm).
0
+�
�+/+⌫dt��/�⌫dt
↵/0
��/�⌫dt
↵/0
�+/+⌫dt
Figure 8: Markov-chain representation of the molec-
ular motor motion.
4.2 DelayFigure 7 shows the delay of an MMC channel within a
small-scale (x < 1 nm) or a large-scale (x > 1 nm). The fig-ures show that there are two regimes for the delay-distancerelationships. First, in the small-scale, the delay follows anon-linear relationship with respect to the distance. Second,in the long rage the delay becomes quickly a linear expres-sion of the distance. This is di↵erent from di↵usion wherethe delay increases as the square of the distance, showingthe advantages of MMC over other types of molecular com-munication mechanisms.
The numerical results match with the experimental mea-surements of molecular motor speeds in the order of a hun-dred nm per second. Although this speed may appear low, itis very large compared with the size of the molecular motorand with di↵usion-based transport.
4.3 AttenuationFigure 9 shows that the attenuation of a MMC channel is
very high within a few nm, which suggests that the molec-ular motor channel is highly noise in nature, however, incontrast with di↵usion Brownian motion, the motion is di-rected.
In the dB scale, the attenuation is very high from 0 to1 nm (from 0 to �50), but for the longer scale, from 1 nm to10 nm, the attenuation does not vary dramatically (less than10 dB di↵erence). Whereas the delay is highly dependenton the drift term V and less on the di↵usion term D, theattenuation depends only on the ratio of the two V/D andthe propagation distance x. The detachment rate ↵ doesnot significantly a↵ect the attenuation, compared with itsimportant influence on the MMC delay.
5. CONCLUSIONA method to obtain the propagation channel model of an
MC-MM network was derived, including closed-form expres-sions of probability of presence for di↵erent topologies. Themodeling enables to find the closed-form expression of thedelay and attenuation. It was observed that the delay in thecase of di↵usion increases with the square of the propagationdistance, whereas for active transport, the delay increaseslinearly with the propagation distance.
We propose for future work to develop realistic modelsof bifurcations and junctions to model molecular transportin dendritic trees. This channel propagation model can en-able the study of other aspects of molecular motors suchas energy consumption, noise, information-theoretical ca-pacity, and modulation schemes. Molecular motor commu-nication outperforms other classes of molecular communi-cation such as di↵usion-based and flow-based communica-tion, which makes it a suitable candidate for designing bio-inspired nanonetworks.
6. ACKNOWLEDGEMENTSThe authors would like to thank Prof. Ian F. Akyildiz
for his constructive criticism which helped to improve thequality of the paper and the referees for their excellent andconstructive feedback. This material is based upon worksupported by the Norwegian Research Council as a part ofthe MELODY project.
7. REFERENCES

0 0.2 0.4 0.6 0.8 1−30
−25
−20
−15
−10
−5
0
Distance x [nm ]
Attenuation[dB]
Closed form α = 5 s
−1
Simulated α = 5 s−1
Closed form α = 15 s−1
Simulated α = 15 s−1
Closed form α = 25 s−1
Simulated α = 25 s−1
(a) Small-scale behavior.
0 200 400 600 800 1000−60
−50
−40
−30
−20
−10
0
Distance x [nm ]
Attenuation[dB]
Closed form α = 5 s
−1
Simulated α = 5 s−1
Closed form α = 15 s−1
Simulated α = 15 s−1
Closed form α = 25 s−1
Simulated α = 25 s−1
(b) Long-scale behavior.
Figure 9: Molecular motor channel attenuation for
di↵erent detachment rates ↵ for small-scale (x <
1 nm) and large-scale (x > 1 nm).
[1] I. F. Akyildiz, F. Brunetti, and C. Blazquez.Nanonetworks: A new communication paradigm.Computer Networks, 52(12):2260–2279, 2008.
[2] Y. Chahibi, I. Akyildiz, S. Balasubramaniam, andY. Koucheryavy. Molecular communication modelingof antibody-mediated drug delivery systems. IEEETransactions on Biomedical Engineering, PP(99):1–1,2015.
[3] J. C. Cochran, Y. C. Zhao, D. E. Wilcox, and F. J.Kull. A metal switch for controlling the activity ofmolecular motor proteins. Nature structural &molecular biology, 19(1):122–127, 2012.
[4] W. R. Gilks. Markov chain monte carlo. Wiley OnlineLibrary, 2005.
[5] W. O. Hancock. Bidirectional cargo transport: movingbeyond tug of war. Nature Reviews Molecular CellBiology, 15(9):615–628, 2014.
[6] F. Mesiti and I. Balasingham. Nanomachine-to-neuroncommunication interfaces for neuronal stimulation atnanoscale. IEEE Journal on Selected Areas inCommunications, 31(12):695–704, 2013.
[7] M. J. Moore, T. Suda, and K. Oiwa. Molecularcommunication: modeling noise e↵ects on informationrate. IEEE Transactions on NanoBioscience,8(2):169–180, 2009.
[8] J. M. Newby and P. C. Bresslo↵. Quasi-steady statereduction of molecular motor-based models of directedintermittent search. Bulletin of mathematical biology,72(7):1840–1866, 2010.
[9] M. Pierobon and I. F. Akyildiz. Capacity of adi↵usion-based molecular communication system withchannel memory and molecular noise. IEEETransactions on Information Theory, 59(2):942–954,2013.
[10] M. Schliwa. Molecular motors. Springer, 2006.[11] T. Suda, M. Moore, T. Nakano, R. Egashira,
A. Enomoto, S. Hiyama, and Y. Moritani. Exploratoryresearch on molecular communication betweennanomachines. In Genetic and EvolutionaryComputation Conference (GECCO), Late BreakingPapers, pages 25–29, 2005.