Embed Size (px)
Citation preview
TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.1
CAPÍTULO 2
INSTALACIÓN EXPERIMENTAL Y MODELO FÍSICO
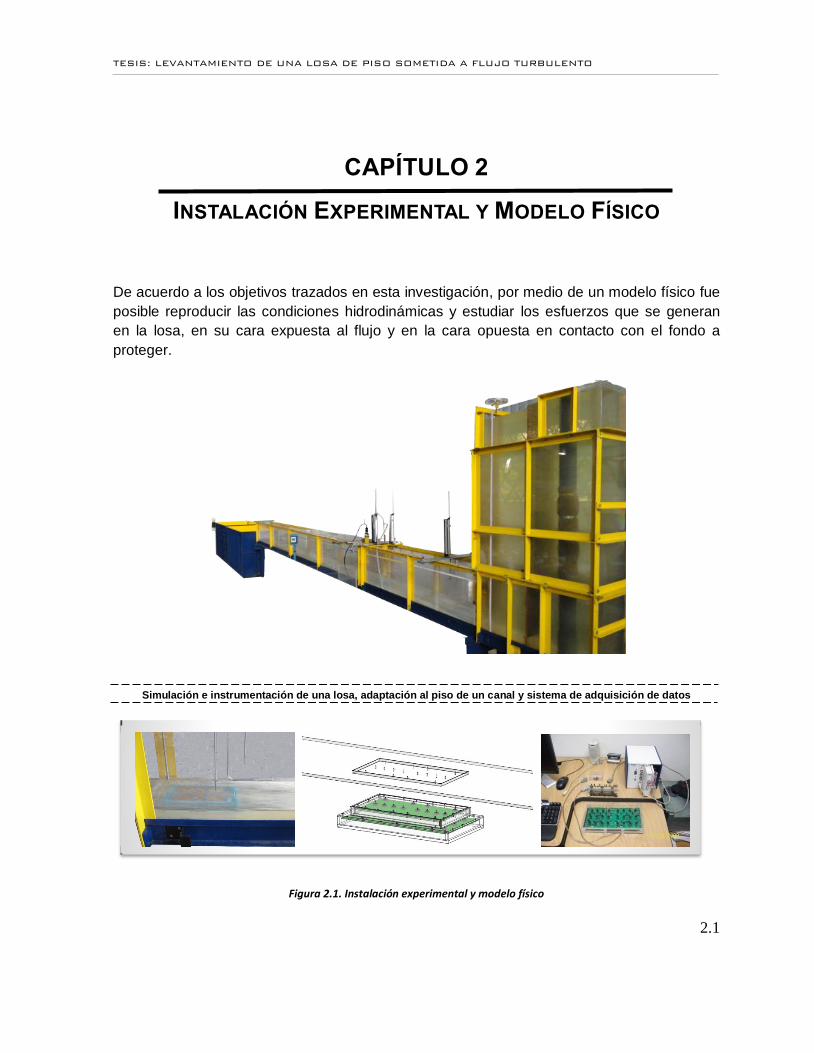
De acuerdo a los objetivos trazados en esta investigación, por medio de un modelo físico fue
posible reproducir las condiciones hidrodinámicas y estudiar los esfuerzos que se generan
en la losa, en su cara expuesta al flujo y en la cara opuesta en contacto con el fondo a
proteger.
Simulación e instrumentación de una losa, adaptación al piso de un canal y sistema de adquisición de datos
Figura 2.1. Instalación experimental y modelo físico
TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.2
2.1 DISEÑO DEL MODELO FÍSICO
El modelo físico fue diseñado para determinar la fuerza de levantamiento a través de la
medición de presiones sobre las caras horizontales de la losa de prueba, usando para este
fin sensores de presión piezoresitivos, bajo diferentes condiciones hidrodinámicas en la
instalación experimental del Laboratorio de Hidráulica en la Universidad del Valle (Cali-
Colombia).
En el estado del arte se mencionó, como los parámetros geométricos largo (L) y ancho (B)
de la losa individual fueron evaluados en diferentes investigaciones en relación con las
presiones de levantamiento (Sánchez y Fuentes, 1978; Hajdin, 1982; Farhoudi y Narayanan,
1991; Pinheiro, 1995; Bellin y Fiorotto, 1995), al igual que el estudio de parámetros del
resalto hidráulico tales como la concentración de aire (Caire; Pinheiro, 1995), el número de
Froude del flujo incidente (Fr1) y la posición de la losa. Por esta razón, el modelo físico de
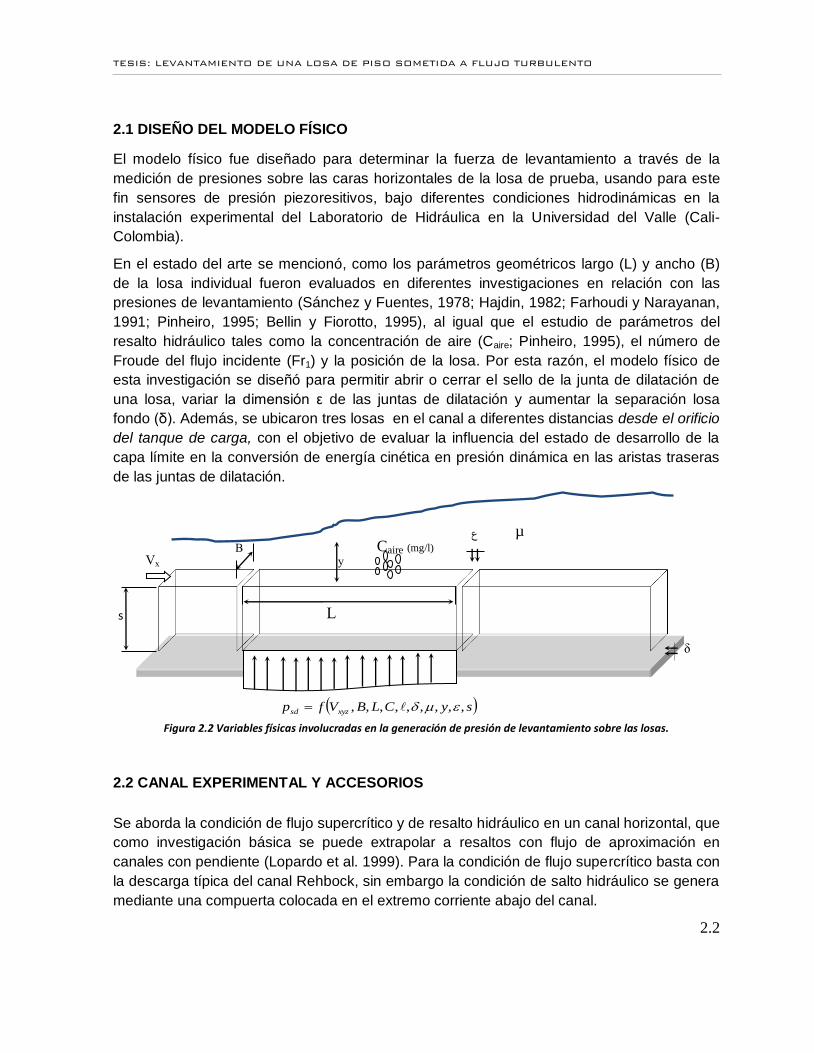
esta investigación se diseñó para permitir abrir o cerrar el sello de la junta de dilatación de
una losa, variar la dimensión ε de las juntas de dilatación y aumentar la separación losa
fondo (δ). Además, se ubicaron tres losas en el canal a diferentes distancias desde el orificio
del tanque de carga, con el objetivo de evaluar la influencia del estado de desarrollo de la
capa límite en la conversión de energía cinética en presión dinámica en las aristas traseras
de las juntas de dilatación.
Figura 2.2 Variables físicas involucradas en la generación de presión de levantamiento sobre las losas.
2.2 CANAL EXPERIMENTAL Y ACCESORIOS
Se aborda la condición de flujo supercrítico y de resalto hidráulico en un canal horizontal, que
como investigación básica se puede extrapolar a resaltos con flujo de aproximación en
canales con pendiente (Lopardo et al. 1999). Para la condición de flujo supercrítico basta con
la descarga típica del canal Rehbock, sin embargo la condición de salto hidráulico se genera
mediante una compuerta colocada en el extremo corriente abajo del canal.
Caire (mg/l) y
µ
ع B
L s
δ
syCLBVfp xyzsd ,,,,,,,,,
xV

TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.3
El canal con 8m de largo, 0.35m de ancho y 0.5m de profundidad, es abastecido de agua por
un tanque de carga (1.8m de altura, 1m de largo y 0.35 m de ancho) a través de un orificio
de altura variable. Dentro del tanque de carga se ubicó una mampara perforada con el
objetivo de disminuir la turbulencia y poder disminuir la fluctuación de la carga hidráulica. La
altura del orificio es definida por medio de una compuerta vertical (Figura 2.3) la cual
asciende hasta 0.065m y su mínima apertura fue de 0.025m, con lo cual el flujo alcanzó
velocidades cercanas a los 5.5 m/s.
Figura 2.3. Canal experimental conformado por tanque de alimentación, canal y tanque
a. Diseño en Solidworks 2010.
El canal descarga a dos tanques rectangulares conectados entre sí (1.22 m de ancho por
2.44 m de largo y 1.22 m de profundidad cada uno), los cuales cumplen el papel de descarga
y almacenamiento en el circuito cerrado. El agua circula mediante un sistema de bombeo,
constituido por dos bombas que se accionan por separado. La bomba más pequeña con 8.15
GPM (galones por minuto) es usada para números de Froude pequeños y tiene una
descarga circular de 4 pulgadas de diámetro, capacidad de 40m de cabeza y motor eléctrico
de 24HP. La bomba más grande permite obtener mayores números de Froude, con una
potencia de 30HP y capacidad para suministrar un caudal máximo cercano a los 14.1 GPM.
El número de Froude fue escogido como parámetro para establecer semejanza y para su
variación fue necesario regular el caudal bombeado y la compuerta del tanque de carga con
aperturas de 2.5, 3.5, 4.5 y 5.5 cm. Por otra parte, la fuerza de inercia se estableció con base
en la velocidad media y para determinar la velocidad de la onda de gravedad, se midió el
tirante sobre las losas con indicadores de punta (Limnímetros; Figura 2.4 y Figura 2.5).
Los Limnímetros de marca Armfield utilizados para la medición de la profundidad del flujo,
poseen una precisión de ±0.2 mm, resolución de ± 0.1mm y con rango de medición de
300mm. Para el montaje sobre el canal y con el fin de evitar la desalineación del limnímetro,
se elaboró un soporte metálico que tiene como función servir de guía y de ajuste sobre el
canal.
a Esquema base cortesía de Sebastián Giraldo

Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.4
Figura 2.4. Montaje experimental para adquisición de datos en condición de flujo supercrítico
La medición de los tirantes, Figura 2.4 y Figura 2.5, se realizó: a) sobre la junta delantera, b)
sobre la junta lateral izquierda, en la mitad de la losa en sentido longitudinal y c) sobre la
junta trasera. En cada punto se midió la mínima y la máxima profundidad, encontrando
valores cercanos para el flujo supercrítico pero variaciones notables para el resalto
hidráulico. El método práctico utilizado para la medición de nivel mínimo con los limnímetros,
consistió en sumergir su punta a la mínima profundidad del agua detectada en un intervalo
de 30 segundos, lo que consistió en un proceso continuo durante las fluctuaciones de nivel
(Figura 2.6). La máxima profundidad fue medida con un proceso similar, la punta del
indicador se iba subiendo hasta que eventualmente era sobrepasada en alguna fluctuación.
Debido a los efectos tridimensionales, la velocidad en el resalto hidráulico intento
caracterizarse a través del sistema ADV™SonTek (Acoustic Doppler Velocimeters). Sin
embargo, durante el procesamiento y análisis de los datos se identificó un alto ruido e
incertidumbre en la medida debido a la macroturbulencia. De acuerdo con el fabricante
(SonTek, 2011), valores de correlación superiores al 70% son los mínimos para obtener
buenos datos de velocidad, sin embargo la correlación de las mediciones estaba por debajo
del 40%, lo que indicaba que solo se podían utilizar para una estimación de la velocidad
media.

TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.5
Figura 2.5. Montaje experimental para la adquisición de datos en condición de resalto hidráulico. a) vista superior y
resalto hidráulico sobre la Losa 3. b) Vista lateral y resalto hidráulico sobre la losa 1.
Figura 2.6. Esquema del resalto hidráulico de acuerdo a Chanson (1996) utilizado para ilustrar la medición de la mínima y
máxima fluctuación de nivel
Reconocida la limitación en la macroturbulencia y dado el interés de conocer las
componentes en el tiempo de la velocidad, se identificó la necesidad de iniciar un trabajo
específico para validar el método de medición con ADV bajo la macroturbulencia antes de
utilizar los datos. No obstante el análisis de los datos no fue incluido en esta tesis ya que se
desviaba del objetivo principal, aunque queda una colección de datos que serán en su
momento el objeto de otro proyecto de investigación, en el cual después de validar un
sistema de filtración adecuado para los datos adquiridos con ADV, permitirá profundizar más
Capa limite es
crecimiento
Región de cortante turbulento
Flujo de capa limite
Longitud del salto hidráulico
Longitud de aireación
Entrada de Aire
y1
Vena
contracta
Mínima y máxima profundidad,
medidas en un punto
y2
a
Yc

Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.6
en el tema relacionado con la fuerza de levantamiento, asociando las velocidades próximas a
las juntas con los campos de presión encontrados en esta investigación.
La velocidad del flujo fue medida con un tubo de Prandtl en un punto ubicado a 0.05 m
corriente arriba de la junta transversal delantera; éste tubo combina las mediciones de
presión estática y total es decir, mide cada una de ellas combinándolas en un manómetro
diferencial, obteniéndose así la carga de presión dinámica (Figura 2.7a; Streeter y Wylie,
1987). El error estimado en la medición con el tubo de Prandtl fue del 4 %.
Finalmente el caudal se midió a partir de un Flujómetro marca Omega (FMG-901), el cual
obtiene las medidas de velocidad por principios electromagnéticos en la tubería de impulsión
(Figura 2.7b).
(a) (b) Figura 2.7. (a) Tubo de Prandtl y esquema para determinar la velocidad, donde: “hp” es la deflexión manométrica, “ρ0” es la densidad relativa del fluido circulante y “ρ” es densidad relativa del fluido manométrico. (b) Flujómetro FMG-901.
2.3 SIMULACIÓN DE LA LOSA EN EL MODELO FÍSICO Y SU INSTRUMENTACIÓN
Para lograr la losa de interés se construyó un conjunto de piezas rectangulares en acrílico,
que unidas al fondo del canal simularían la losa de revestimiento, sus losas vecinas y por
supuesto las juntas de dilatación formadas entre ellas. El modelo físico fue conformado
básicamente por una caja interna (simula la losa), un marco externo concéntrico a la caja
interna con lado mayor en la dirección del flujo (simula las losas vecinas, Figura 2.8); entre
los lados frontales y posteriores de ambas piezas se estableció una separación de dimensión
ε, formándose así dos cavidades (juntas transversales): una delantera y otra trasera; igual
procedimiento se siguió con los lados longitudinales lográndose así dos cavidades
longitudinales. El fondo a proteger fue simulado por una lámina de acrílico unida al marco y
que funcionó como el asiento de la caja interna. De igual forma este fondo, se convirtió en la
tapa de una caja que contenía los sensores de presión encargados de medir las presiones
debajo de la losa simulada.
12ghv 0
p
Presión Total
Presión Estática

TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.7
Figura 2.8. Losa experimental desglosadab
.
Luego ambas cajas construidas fueron acopladas a la cara inferior del canal mediante un
sistema tipo prensa, debidamente impermeabilizadas con “limpia tipo”, de tal forma que se
lograra un solo sistema simulador de una losa de protección de piso. Las dimensiones de la
losa se indican en la Tabla 2.1 y para una mejor ilustración de la instalación se presenta la
Figura 2.9 y la Figura 2.10.
(a)
(b) (c)
Figura 2.9. Dimensiones características de (a) Marco (b) Caja superior (c) Caja inferior.
b
Esquema base cortesía de Edwin Hurtado
Piso del canal experimental
Marco y fondo de Acrílico
Caja superior porta
Sensores (losa)
Conjunto de elementos de la
parte inferior (fondo de la losa)
Tapa de la caja superior porta
sensores
Junta transversal Junta Longitudinal
Tarjeta porta sensores
Hm
Lm
Bm
LC1
HC1
BC1
LC2
HC2
BC2

Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.8
Las cajas montadas (Figura 2.9) formaron una losa fija, juntas longitudinales y transversales,
pero a su vez el dispositivo permitió que la losa asentara en su fondo o se separara de éste
mediante unos discos diminutos de aluminio, que permitieron que entre ellas existiera una
delgada capa de fluido de espesor igual a δ.
Para observar la influencia de las juntas de dilatación se variaron las dimensiones de las
cajas (Tabla 2.1) logrando establecer cavidades de ancho (ε) de 0.5mm, 1 mm, 1.5 mm y 2
mm con una precisión de 0.2 mm, ya que las piezas fueron realizadas por una máquina de
corte a laser. Por otra parte, también se varió el espaciamiento entre la cara inferior de la
losa y su asiento (fondo a proteger) con separaciones de 0, 200, 500 y 1000 micras.
Adicionalmente se simularon escenarios en dónde una de las cuatro juntas estaría abierta y
las otras restantes selladas (abierta la junta transversal o la junta longitudinal), con sellos en
dos de las juntas simultáneamente (las longitudinales (L), las transversales (T)) y finalmente,
con las cuatro juntas de la losa expuestas al flujo.
Tabla 2.1. Dimensiones de los componentes de la losa y medidas externas (en metros)
Marco Caja 1 Caja 2 s*
carilico
x ε s= Hm+ s**
Losa 1a (2007)
Lm 0.296 LC1 0.280 LC2 0.372
0.006 0.12 0.002
0.030 Hm 0.021 HC1 0.021 HC2 0.039
Bm 0.166 BC1 0.150 BC2 0.204
Losa 1 (2010)
Lm 0.307 LC1 0.294 LC2 0.372
0.006 0.12 0.0005
0.034 Hm 0.025 HC1 0.025 HC2 0.039
Bm 0.169 BC1 0.156 BC2 0.204
Losa 2 (2010)
Lm 0.317 LC1 0.299 LC2 0.372
0.008 1.66 0.0010
0.037 Hm 0.028 HC1 0.028 HC2 0.039
Bm 0.178 BC1 0.160 BC2 0.204
Losa 3 (2010)
Lm 0.318 LC1 0.299 LC2 0.372
0.008 3.16 0.0015
0.038 Hm 0.029 HC1 0.029 HC2 0.039
Bm 0.179 BC1 0.160 BC2 0.204
s* es el espesor del acrílico utilizado para simular la losa. s** es el espesor del fondo del canal y empaque
mas El arreglo experimental fue tal que la caja interna de acrílico (caja 1) contenía los
sensores para medir la presión en el piso del canal, mientras la caja de acrílico externa (caja
2) tenía en su tapa los agujeros por donde los sensores en su interior registraban la presión
debajo de la losa (caja 1). Las tarjetas se adaptaron al sistema de cajas perforando con un
taladro de banco las cavidades en donde encajaban los sensores y los ductos que
conducirían los cables que transmitirían la información al sistema de adquisición de datos
(Figura 2.11).
La separación losa-fondo fue posible interponiendo entre la losa y el fondo a proteger, anillos
de 1 mm de diámetro hechos en lámina de aluminio del espesor requerido para lograr la
separación deseada (200, 500 y 1000 μm). El interés de esta variación era conocer el efecto
de la separación losa-fondo, ya que si bien la losa en su construcción inicialmente asienta de
tal forma que la separación es mínima o nula, en el tiempo la separación puede variar debido
a fenómenos tales como la tubificación (lavado del material fino) u otras fuentes de
movimiento que inducen a la reacomodación de las losas.
El arreglo experimental fue tal que la caja interna de acrílico (caja 1) contenía los sensores
para medir la presión en el piso del canal, mientras la caja de acrílico externa (caja 2) tenía
en su tapa los agujeros por donde los sensores en su interior registraban la presión debajo
de la losa (caja 1). Las tarjetas se adaptaron al sistema de cajas perforando con un taladro

TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.9
de banco las cavidades en donde encajaban los sensores y los ductos que conducirían los
cables que transmitirían la información al sistema de adquisición de datos (Figura 2.11).
Figura 2.10. Instalación de la losa con la cara inferior del canal. Esquema del diseño de la losa experimental.
Vista superior de la losa. Especificación de las juntas.
De igual forma se perforó el piso del canal de acrílico siguiendo la distribución establecida de
sensores y las ranuras donde se ubicarían las juntas de dilatación (Figura 2.10 y Figura
2.11); sin embargo, este procedimiento fue realizado con láser buscando evitar desniveles y
rebabas.
Marco
Caja 1
Caja2
Fondo del canal
Losa
Sentido de flujo
Junta delantera
Junta trasera
Sentido de flujo
Junta delantera Junta trasera
Junta derecha
Junta izquierda

Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.10
Figura 2.11. Losa y fondo instrumentados: a) Vista superior de la losa simulada e instrumentada. La línea rosada resalta las cavidades; b) Vista superior de la caja que contiene los sensores que instrumentan el fondo a proteger, el cual se puede observar con los correspondientes orificios en donde encajan los sensores, en la parte superior de esta ilustración. La línea rosada demarca los sensores que se sitúan exactamente en el fondo de la cavidad.
2.3.1 Nivel entre las aristas de una junta transversal en el modelo experimental.
El problema del alineamiento fue reconocido por algunos investigadores en el momento de
abordar el fenómeno de levantamiento hidrodinámico con un conjunto de losas (Levi y Masa,
1972; del Risco, 1983; Levi y del Risco, 1989). Para mantener a nivel las aristas de las
juntas, fue necesario mantener estática la losa del modelo sin posibilidades de falla ni
desplazamiento, ya que lo anterior podía conducir a que sobresaliera alguna de las aristas
generando escalones positivos con puntos claros de estancamiento, situación ya descrita por
Frizell K. (2007, 2005).
Para el diseño del montaje experimental, el acople entre elementos del sistema fue
modelado en SolidWorks (programa de diseño asistido por computadora para modelado
mecánico) y así conocer las posibles deformaciones que se podían inducir en los ajustes
para el sello hermético del sistema. Mediante la modelación, Figura 2.12, se observó que
podría existir un desnivel entre las aristas de la junta transversal de ± 0.1 mm si se sometía
el sistema a fuerzas que indujeran a la fluencia del acrílico utilizado en el modelo hidráulico.
A demás indicó que en la junta transversal delantera no se presentaba algún escalón positivo
y que por el contrario, la arista delantera estaría, en caso de deformación, debajo del nivel de
la arista trasera.
De acuerdo a lo anterior, los desniveles fueron menores a 0.1 mm, ya que las fuerzas
aplicadas no llegaron a la fuerza en induce la fluencia del acrílico del modelo físico
Caja instrumentada que simula el fondo
Sensores ubicados en el fondo de la cavidad
Marco que simula las losas vecinas
Regleta de acrílico dentro de la cavidad
(a) (b)

TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.11
Figura 2.12. Desplazamiento de las aristas correspondientes a las cavidades transversales delantera y trasera.
2.3.2 Medición de presiones.
En cuanto los sensores de presión, gracias a su forma y reducido tamaño, permitieron
adaptarse a la losa simulada logrando medir la presión de manera simultánea sobre su cara
expuesta al flujo principal y en el fondo a proteger. De esta manera fue posible conocer los
campos de presión sobre la losa en función del tiempo y el espacio; además de encontrar el
punto de aplicación real de la fuerza resultante, contrario a la medida únicamente de la
Desnivel entre un punto medio de la arista transversal delantera y un punto medio de la arista transversal trasera en la junta transversal delantera de la losa. Escala de deformación: 6:1

Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.12
fuerza de levantamiento con un solo transductor ubicado en el centro de gravedad (Farhoudi
and Narayanan, 1991; Bellin and Fiorotto, 1995).
(a) (b)
Figura 2.13. Dispositivo para medir la presión (a) Esquema de fábrica de sensor piezoeléctrico Motorola MPXV 4006GC7U. (b) Tarjeta superior de alimentación y distribución de sensores.
Para la determinación de las fuerzas se emplearon 32 sensores piezoresitivos MOTOROLA
MPXV 4006GC7U (Figura 2.13, Tabla 2.2). Las terminales de cada sensor fueron acopladas
sobre bases cuya alimentación de voltaje hacia cada una de ellas se logró por medio de una
tarjeta electrónica, la cual a su vez permitieron la interconexión de componentes resistivos y
capacitivos que lograron optimizar el funcionamiento de cada sensor.
Tabla 2.2. Características de los sensores de presión MPXV4006GC7U
Rango de indicación [0-6 kpa] ó [0-61.2 cm H2O]
Resolución [0.000001 voltio]
Voltaje de suministro Máximo [5.25]- Mínimo [4.75]
Intervalo de Medición 10-60 ºC, Vfss [4.6 voltios ] Offset [0.152-0.378] voltios
Precisión. El error considera: Linealidad, Presión y Temperatura de histéresis, estabilidad de offset
2.46 % Vfss definiendo el offset
5 % Vfss Sin definir el offset.
Desviaciones sobre una tempera de referencia de 25ºC de 10-60ºC. Estabilidad del offset entre ±5ºC, 1000 ciclos de temperatura o 1.5 millones de ciclos de presión.
Sensibilidad [766 vol./kpa]-[7.511 mV/mm H2O]
Constancia Debido a los sedimentos la constancia de fábrica no es confiable por lo cual se calibra constantemente
Es pertinente mencionar que estos sensores se diseñaron para operar en aire y son auto-
compensados por cambios de temperatura. Sin embargo, vienen protegidos con una capa de
flourosilicona que sirve de protección ambiental, la cual recibe la presión, trasmitiéndola al
diafragma de silicio, lo que resulta en un cambio en la tensión de salida en proporción directa
a la presión aplicada (Motorola, 2003). Para verificar la precisión y exactitud de los sensores,
se calibró estática y dinámicamente antes y después de un grupo de pruebas, generalmente
entre tres y cuatro veces al día para verificar las características instantáneas del sensor con
un espaciamiento promedio entre ellas de 2.5 horas (Observar la metodología de calibración
en el anexo 3). De acuerdo a la experiencia experimental, la vida útil de un sensor podría
estar alrededor de: a) 720 horas de trabajo montado en el modelo y b) por encima de las
2880 horas de trabajo solamente sumergido en agua. Para el último dato, se realizó el

TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.13
montaje de un sensor en un recipiente cilíndrico con agua, verificando así su buen
comportamiento durante 32 semanas. Por otra parte, en el modelo físico el sensor se
encontraba sometido a otros esfuerzos propios del montaje y relacionados con el cambio de
una configuración a otra que generaba su rápido deterioro.
2.3.3 Distribución de los sensores
La disposición de los sensores en la cara de la losa fija donde se pretendía medir, se
estableció intentando cubrir simétricamente la mayor área posible de la superficie superior e
inferior de las cajas, sin exceder el número de canales de entrada disponibles en el equipo
de adquisición de datos e intentando, tener una distribución tal que permitiera corregir el
funcionamiento anormal del sensor por interpolación dado el caso.
(a)
(b)
Figura 2.14. Distribución de sensores de presión a) primera alternativa b) segunda alternativa.
Dos distribuciones básicas fueron implementadas, una de ellas buscaba la simetría encima y
debajo de la losa, instrumentado 16 tomas de presión en cada cara con igual distribución
(Figura 2.14a). La otra buscaba una mayor resolución de la presión debajo de la losa y en
especial en el fondo de las juntas de dilatación, por lo cual se implementaron 24 sensores
-20
0
20
40
60
80
100
120
140
160
-30 20 70 120 170 220 270 320
Dis
tan
cia
tran
sve
rsal
(m
m)
Distancia Longitudinal mm
-50
0
50
100
150
200
-50 0 50 100 150 200 250 300 350
Dis
tan
cia
tran
sve
rsal
mm
Distancia Longitudinal mm

Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.14
debajo del bloque (Figura 2.14b) y 8 encima. Los 8 de encima eran seleccionados a partir de
las 16 tomas de presión en la cara superior de la losa (Figura 2.14a) y se elegían: a) Los 8
centrados en el eje longitudinal (recuadro punteado, Figura 2.14a). b) Los próximos a las
aristas (fuera del recuadro punteado, Figura 2.14a). De los 24 sensores debajo de la losa, 12
de ellos se ubicaron con el fin medir la presión en el fondo de las juntas. Lo anterior permitió
evaluar el amortiguamiento o la amplificación de la presión y los gradientes de presión
debajo de la losa
2.4 EFECTO DEL ESTADO DE DESARROLLO DE LA CAPA LIMITE
El posicionamiento de tres losas en el canal desde el orificio del tanque de carga se varió
con el objetivo de evaluar la influencia del estado de desarrollo de la capa límite en la
conversión de energía cinética en presión dinámica en las aristas traseras de las juntas de
dilatación (Figura 2.15). Dicho fenómeno se explica físicamente al considerarse que el flujo al
entrar a la junta anula momentáneamente el esfuerzo cortante de pared (desde la arista
delantera de la junta hasta su arista trasera) y con ello empieza a incrementar su velocidad,
así como a acelerar las partículas fluidas dentro de la junta, generando una región de
mezclado de espesor creciente en el sentido del movimiento. Las partículas fluidas dentro y
sobre la junta alcanzan su máxima velocidad antes de colisionar con su arista trasera,
posteriormente el choque convierte ese borde en un potencial segmento de estancamiento y
se genera presión dinámica transferible al interior de junta, como sucede en una cavidad.
Prensa que comprime las cajas que simulan la losa artificial al piso del canal experimental
Figura 2.15. Instalación experimental con las tres losas y corte transversal central de una losa en sentido del flujo.
Sistema, Orificio –Compuerta
Orificio para la trasmisión de la presión
Bomba de recirculación
Tubería de alimentación
Tanque de descarga
Prensa que comprime las cajas que simulan la losa artificial al piso del canal experimental
Sentido del flujo
Transductor de presión.
Tanque de alimentación
Orificio comunicado con un sensor
Junta Transversal
Capa comunicante entre las juntas, parte inferior del bloque
Fondo del canal
Tarjeta porta sensores
inferiores
Caja 1
Caja 2
Caja 3
Sistema de adquisición de datos
Caudalímetro electromagnético
Losa simulada e instrumentada
Sistema, Orificio -Compuerta
Tanque exterior para la recirculación

TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.15
Según Çengel y Cimbala (2006) para una placa plana y lisa con un flujo uniforme, el proceso
de transición comienza en un número de Reynolds en la capa limite (Rex = ) crítico de
105 y continúa hasta su turbulencia en Rex aproximado a 3 x 106. Además, dicha transición a
la turbulencia puede ocurrir generalmente mucho antes que los valores mencionados (en un
valor más bajo de Rex), ya que el flujo es afectado por factores tales como la rugosidad a lo
largo de la superficie, las perturbaciones de flujo libre, el ruido acústico, vibraciones y
pequeñas curvaturas de la pared. Así, la losa 1 fue ubicada a una distancia del orificio en
donde el Rex oscila entre 300.000 y 660.000 (transición), la losa 2 fue la zona media con Rex
de 4.150.000 a 9.130.000 y la losa 3 fue la más alejada con Rex de 7.900.000 a 17.380.000.
2.5 CONDICIONES EVALUADAS
Los escenarios fueron establecidos de acuerdo a lo descrito en la Tabla 2.3, para los
diferentes espaciamientos entre las losas y la supuesta roca base en la réplica experimental
(δ). Estas repeticiones se realizaron adicionalmente variando ε y el número de juntas
expuestas al flujo en diferentes condiciones hidrodinámicas. Lo anterior permitió variar las
relaciones funcionales establecidas tras aplicar el teorema de PI Buckingham, utilizado
como herramienta que permite reducir el número de ensayos que deben realizarse para
averiguar la respuesta del sistema (ecuación 2.1).
,,,,,,,,,,,,
27654321
y
V
sCLB
V
pf (2.1)
Como resultado se evaluaron 760 condiciones producto de la adquisición de datos desde el
año 2008 hasta el año 2011. En este tiempo y bajo el mismo concepto, el modelo
físico contó con la variación en la distribución de los sensores en la superficie superior e
inferior de la losa. Dos distribuciones básicas fueron implementadas, una de ellas buscaba la
simetría encima y debajo de la losa, instrumentado 16 tomas de presión en cada cara con
igual distribución. Bajo esta configuración, se tomaron 87 condiciones de referencia con
números de Froude del flujo incidente entre 3 y 10, ya que a partir del número de sensores
dispuestos se podía integrar el campo de presión arriba y debajo de la losa, calcular la fuerza
resultante y su punto de aplicación. Estas condiciones incluían dos o más sellos
desprendidos en las juntas y la variación de su posición, de tal forma que se dejaban
expuestas a flujo supercrítico y resalto hidráulico las juntas de dilatación en sentido
longitudinal, transversal o todas ellas.
Para evaluar el efecto sobre la fuerza de levantamiento de otras variables asociadas como el
ancho de la junta de dilatación, la separación losa fondo, una sola junta expuesta, etc. y
enriquecer la colección de datos, se cambió la distribución de los sensores buscando una
mayor resolución de la presión debajo de losa y en especial en el fondo de las juntas de

Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.16
dilatación (24 sensores debajo de la losa y 8 sensores encima). Este cambio se debió a: 1)
Se consideró que las variaciones realizadas en la configuración de la losa afectaban
principalmente la presión trasmitida debajo de la losa. 2) Se redujeron los tiempos que se
requerían para procesar los datos instante a instante, ya que solo se consideró la fuerza
debajo de la losa. 3) Se necesitaba una mayor resolución debajo de la losa para corroborar
los gradientes de presión observados en las 87 condiciones previamente realizadas.
Tabla 2.3. Síntesis de relación de variables para la adquisición de datos.
Establecer condición (Paso 1) VARIABLES PARA LA ADQUISICIÓN DE DATOS
Δ (0/500/1000/2000)
Espaciamiento entre la losa y el fondo a proteger δ = 0 / 200/ 500 / 1000 micras
JDEL, JDYT, TO, JTDT, JLD, LDIZ.
Orientación de las juntas expuestas de la losa experimental transversales (T)/ longitudinales (L)
Aguas arriba (1) y aguas abajo (2); Izquierda (I) Derecha (D)
ε (0.5/1/1.5/2)
Espesor de las juntas de expansión-contracción. ε = 0.5/ 1 / 1.5/ 2 mm
FS/SH FLUJO SUPERCRÍTICO (FS) SALTO HIDRÁULICO (SH)
Variaciones hidrodinámicas, caudal y tirante (Paso 2)
Paso 3 Paso 4
Medidas para FS Medidas para SH
# de prueba
orificio (cm)
Variación Froude.
Registro presión
h (m)
Vx. Tubo
Prandtl V
* Registro presión y Vxyz
h (m)
H (m)
y1 (cm)
y2 (cm)
L (cm)
Rango 1 2 3 hp(cm- Hg) 1 2 3 1 2.5 4-6 I 2 2.5 6-9 I 3 2.5 9-12 I 4 3.5 4-6 II 5 3.5 6-9 II 6 3.5 9-12 II 7 4.5 4-6 III 8 4.5 6-9 III 9 4.5 9-12 III
En donde V* es el vertedero al final de canal con el que viene dado el salto hidráulico I, II o III según sea el caso.
Las diferentes variables hidráulicas para cada una de las condiciones hidrodinámicas
experimentadas bajo el resalto hidráulico y el flujo supercrítico se registraron en la forma
mostrada en la Tabla 2.4.
Tabla 2.4. Formato de la tabla de las características medibles del flujo
#
Losa
Tipo de
flujo
Fecha y
hora
Vertedero[cm]
- Bomba SD
Tipo
Juntas δ
[mm]
a
[m]
Q
[m3/s]
H
[m]
R’
[cm]
R’p
[cm]
U1
[m/s] Fr
y1[m] y2 [m] y3 [m] y4 [m] y5 [m] Lr [m] 30%*Lr[m]
La cual reúne los siguientes datos:
Tipo de flujo: Corresponde a flujo supercrítico o resalto hidráulico.
Vertedero-Bomba: Altura del vertedero utilizado en la en condición de salto hidráulico y
la bomba operada (La grande o la pequeña); SD: sensores defectuosos identificados.

TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.17
Tipo de juntas: Se especifica la configuración de juntas, ya sea JDEL (junta delantera),
JDYT (junta delantera y trasera), TO(todas las juntas), JTDT (junta trasera), JLD (junta
longitudinal derecha) o LDIZ (juntas longitudinales);
δ: Espaciamiento suelo-losa en milímetros; a: abertura de la compuerta del tanque de
alimentación.
Q: Caudal medido en la tubería. H: Carga en el tanque de alimentación;
yi= Profundidad según la posición; el subíndice “i” varía de 1-5. Se toman 3 tirantes para
la condición de flujo supercrítico y 5 para la condición de resalto hidráulico.
R’: Deflexión manométrica medida; R’p: Deflexión manométrica promedio.
U1: Velocidad del flujo incidente; Fr: Número de Froude Lr: Longitud del resalto.
Para la variaciones de las condiciones hidrodinámicas, el caudal era regulado así como la
compuerta vertical del tanque de carga, generando velocidades del flujo incidente entre 1.65
y 5.76 m/s y manteniendo en régimen de flujo turbulento con números de Reynolds entre
90.000 y 200.000; las aperturas del orificio de la compuerta vertical del tanque de carga
fueron variadas entre 2.5 y 5.5 cm, alcanzando números de Froude entre 3.0 y 16.5. La losa
1 fue trabajada con la dimensión de la junta ε de 0.5 mm y 2mm, mientras en la losa 2, ε fue
de 1 mm y por último en la losa 3, ε fue de 1.5 mm.
En especial para generar el resalto hidráulico, diferentes tipos de vertederos fueron usados
en las pruebas, identificados según la altura en centímetros que variaban de 5 a 20 cm, para
un total de 13 vertederos. Por otra parte, para todas las pruebas se intentó localizar el 30%
de la longitud del resalto hidráulico cerca de la junta delantera, puesto que en general las
máximas fluctuaciones de presión se reportan en el primer tercio de longitud del resalto
hidráulico en los trabajos de Vasiliev y Bukreyev (1967), Pinheiro (1995), Khader y Elango
(1974), Toso y Bowers (1988), Fiorotto y Rinaldo (1992a; b), Lopardo et al. (1999),
Hassonizadeh y Shafai-Bajestan (2001) y Mees (2008). Al ubicar la junta de dilatación en la
zona de mayor fluctuación positiva, se buscaba teóricamente propagar el máximo pulso de
presión debajo de la losa y que junto con una fluctuación negativa en la superficie, se
pudiera medir la presión bajo la condición más crítica de estabilidad.
2.6 EQUIPOS E INSTRUMENTOS DE RECOLECCIÓN DE LA INFORMACIÓN
El equipo de adquisición de datos de la marca National Instruments (Figura 2.16), permite la
conversión de señal análoga en digital, es decir, transforma en una cantidad digital un voltaje
o corriente análoga correspondiente, midiendo y acondicionando bajo cierta tasa de
muestreo; además de almacenar registros de las señales provenientes de los sensores de
prueba para ser procesados en computador. El software utilizado es el LABVIEW 7.1®, que
permite adelantar procesos inherentes a la adquisición y visualización de la señal en tiempo
real (Figura 2.17).

Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.18
(a) (b) (c) (d)
Figura 2.16.Equipo de adquisición (a) Chasis SCXI.-1000 con fuente de potencia, (b) SCXI-1102B (Módulo de 32 Canales de Entrada de Multiplexor de ±60 VDC, 2 Hz), (c) NI SCXI-1600 módulo digitalizador, (d) SCXI 1300 módulo multiplexor.
Figura 2.17. Interfaz gráfica del programa para la adquisición de datos
Para los ensayos la frecuencia de muestreo fue de 200 Hz y para su elección se tuvieron en
cuenta tres aspectos:
Cumplir el teorema de muestreo para evitar el enmascaramiento (“aliasing”) de la señal, el
cual es el efecto que causa que señales continuas se tornen no distinguibles cuando se
muestrean digitalmente. El teorema del muestreo establece que la frecuencia de muestreo
debe ser mayor o como mínimo igual al doble de la frecuencia máxima ( ) que
predomina en la señal a analizar ( ). Teniendo en cuenta estas consideraciones
y que las frecuencias máximas inherentes a fenómenos hidráulicos no superan los 50 hz
(Lopardo et al, 1996) y además, que las frecuencias dominantes de las fluctuaciones de
presión en resaltos hidráulicos son menores a 25 hz (Bowers and Tsai, 1969), debe ser
definida por encima de los 50 Hz.
La máxima frecuencia de muestreo permitida por el equipo es de 200 Hz. El equipo de
adquisición de datos disponible (National Instruments), permite la conversión de la señal
Registro de voltaje de los sensores inferiores y superiores
Señal en el tiempo Botón para accionar o parar la adquisición de datos
TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.19
análoga a digital proveniente de 32 sensores piezoresistivos, acondicionando primero la
señal en cada canal con un filtro pasabajo de 200 Hz (Modulo SCXI-1102B) y
posteriormente, se realiza el proceso de muestreo, cuantificación y codificación, para
entregar la señal digital (Modulo SCXI-1600) que se almacena en un computador.
Una mayor frecuencia de muestreo permite tener una señal digitalizada espaciada por
intervalos de tiempo pequeños y de esta forma, se pueden estudiar y detallar mejor los
cambios en los campos de presión encima y debajo de la losa en un intervalo de tiempo.
Al escoger la frecuencia de muestreo en 200 Hz limitada por el sistema de adquisición de
datos disponible, se cumple el teorema del muestreo (se evita enmascaramiento o aliasing),
se gana resolución en el tiempo de la señal digitalizada y la posibilidad de estudiar al detalle
los campos de presión al estar espaciados por pequeños intervalos de tiempo (5 ms).
Posteriormente a la digitalización y análisis de la señal, se utilizó un filtro digital de mediana
para eliminar las componentes de frecuencia fuera del fenómeno. De acuerdo a los análisis
de la señal en frecuencia y las características dinámicas del sistema de medición de presión,
la frecuencia de corte del filtro digital fue seleccionada en 10.58 Hz.
Una vez escogida la frecuencia fs se define el tiempo de muestreo, para lo cual es importante
tener en cuenta que los fenómenos de naturaleza macroturbulenta no tienen periodicidad y
tienen duración infinita, de manera que cada segmento de datos adquiridos hace una
contribución única (siendo diferente de otro segmento), por lo que las magnitudes obtenidas
en cualquier medición finita en el tiempo, son estimaciones respecto de las magnitudes
verdaderas, aumentándose el grado de precisión a medida que se aumenta el tiempo de
medición (Tatone, 2010B). El tiempo mínimo estipulado por autores como Lopardo y Henning
(1985) es un minuto. Por su parte, Fiorotto y Rinaldo (1992b) y Toso y Bowers (1988)
mostraron como el coeficiente de presión positivo y negativo aumentó en un sensor a lo largo
del tiempo para un ensayo de 12 y 24 horas, respectivamente. Larcan et al. (1998)
recomiendan extender el periodo de adquisición lo mayor posible (9 minutos a 128 hz), pero
el inconveniente radica en el inmanejable tamaño de datos que resultaría.
De esta forma la elección del tiempo de muestreo estuvo asociado principalmente al número
de condiciones que se pretendía explorar (760), el tipo de análisis que se quería realizar
(análisis en el dominio del tiempo de los campos de presión) y consecuentemente, a la
capacidad económica y tecnológica disponible para hacer el proyecto viable en el tiempo. De
acuerdo a lo anterior, se realiza la adquisición de datos con un tiempo de muestreo de 5
minutos a 200hz, obteniendo así 60.000 campos de presión (32 sensores y 60.000 instantes
por cada uno). Lo anterior a criterio del grupo de investigación fue información suficiente para
detallar las diferentes configuraciones de los campos de presión y se deja al factor de
seguridad, los probables aumentos de la presión para eventos más largos.

Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.20
Por otra parte, de acuerdo a la National Instruments (2006c) como fabricante de sistema de
adquisición de datos, el tiempo de desfase entre la adquisición de la señal del primero y el
ultimo canal es de 93 μs, despreciable con respecto al tiempo entre muestras establecido
(5000 μs).
2.7 CALIBRACIÓN DE LOS SENSORES
El procedimiento experimental en cada prueba consistió primero en calibrar los transductores
de presión, para lo cual se utilizó la metodología y el generador descrito en el Anexo 3, el
cual permitió someter el sistema a la función rampa y escalón, por lo cual del análisis de la
señal en el dominio del tiempo se establecieron las características de cada sensor.
(a) (b)
(c) (d)
Figura 2.18. Calibración de sensores (a) Columna de agua sobre sensores, (b) Curva de calibración del voltaje observado contra la columna de agua (H), donde Vs= Voltaje registrado (volts), Si= Sensibilidad del sensor (volts/cm), ∆e= Offset
(cm). c) .Regresión típica de un sensor con buena linealidad. d) Comportamiento típico de un sensor defectuoso.
Durante la función rampa se realizó la adquisición de voltaje correspondiente a 3, 5, 7, 10,
12, 15, 20, 22, 25, 30, 35 y 40 cm de H2O respectivamente. Por su parte, la función escalón
c http://digital.ni.com/public.nsf/allkb/862567530005F0A1862569F4005FAAFD
50 100 150 200 250 300 350 400 4500.5
1
1.5
2
2.5
3
3.5
4Curva de calibración: sensor 11, Vs = 0.0074062 H + 0.45371, r2 = 0.99994, Syx = 1.3366
H [mm]
Vs [
V]
Datos
Regresión
50 100 150 200 250 300 350 400 4500.18
0.2
0.22
0.24
0.26
0.28
0.3
0.32Curva de calibración: sensor 10, Vs = 0.00023208 H + 0.18867, r2 = 0.8172, Syx = 86.3613
H [mm]
Vs [
V]
Datos
Regresión
𝑉𝑜𝑢𝑡 = 𝑉𝑜𝑓𝑓 + 𝑆𝑑𝐻 𝑉𝑜𝑓𝑓
TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.21
se aplicó variando las columnas de agua de 5 a 7, 5 a 22 y de 5 a 32 cm respectivamente, es
decir escalones de 2, 17 y 27 cm de H2O (Anexo 3). En la Figura 2.18 se observa la
respuesta del sensor MPXV4006G a la función rampa y de acuerdo a la capacidad del
generador, se verifica la linealidad hasta una amplitud de 40 cm de H2O, así como su
sensibilidad y el intercepto . La respuesta del sensor a los escalones (Anexo 3), permitió
determinar el ancho de banda en 66.5 rad/s (10.58 Hz) y escalones promedio de 17 cm de
H2O sin variar la función de transferencia, estableciendo así las características en donde el
sensor tiene la capacidad de detectar fielmente la señal.
2.8 VERIFICACION E IDENTIFICACIÓN DE SENSORES DEFECTUOSOS
Todo dispositivo tiene una vida útil de funcionamiento, al finalizar empieza a presentar fallas
o se arruina por completo. Esto ocurre igualmente a los sensores utilizados durante este
experimento y más aún cuando se están utilizando en un ambiente para el cual no fueron
diseñados. Por esta razón fue de gran importancia aprender a reconocer cuando estos
instrumentos se han deteriorado.
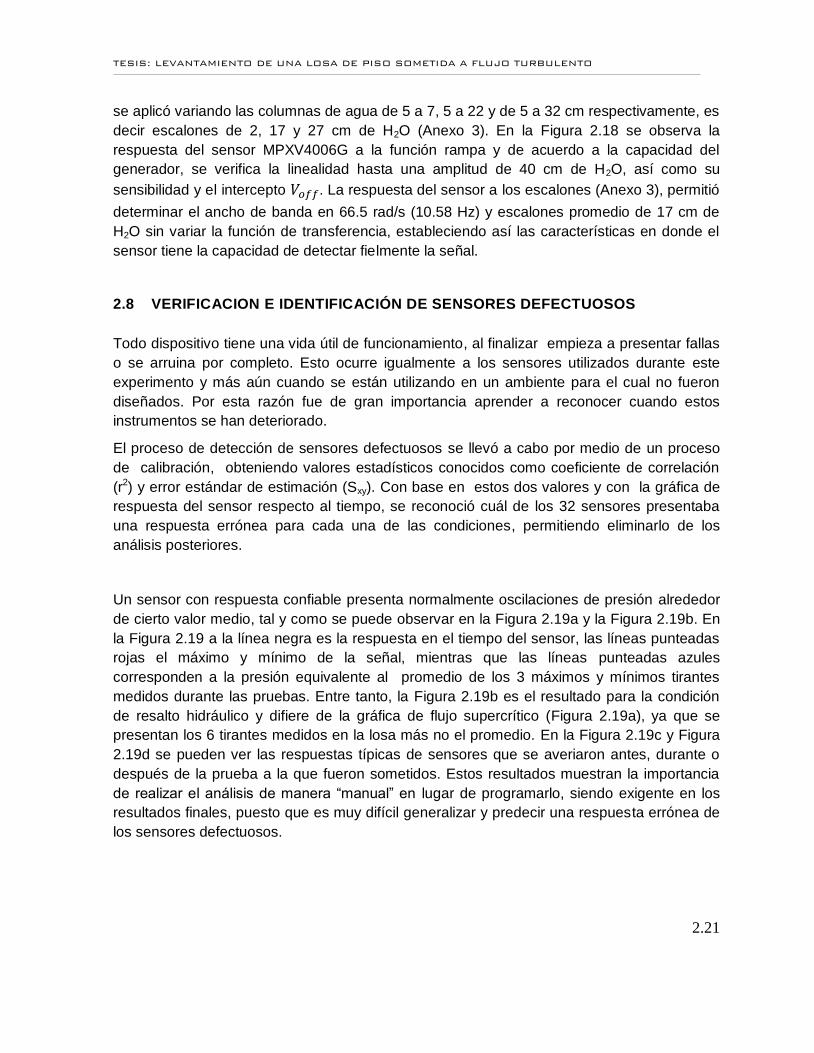
El proceso de detección de sensores defectuosos se llevó a cabo por medio de un proceso
de calibración, obteniendo valores estadísticos conocidos como coeficiente de correlación
(r2) y error estándar de estimación (Sxy). Con base en estos dos valores y con la gráfica de
respuesta del sensor respecto al tiempo, se reconoció cuál de los 32 sensores presentaba
una respuesta errónea para cada una de las condiciones, permitiendo eliminarlo de los
análisis posteriores.
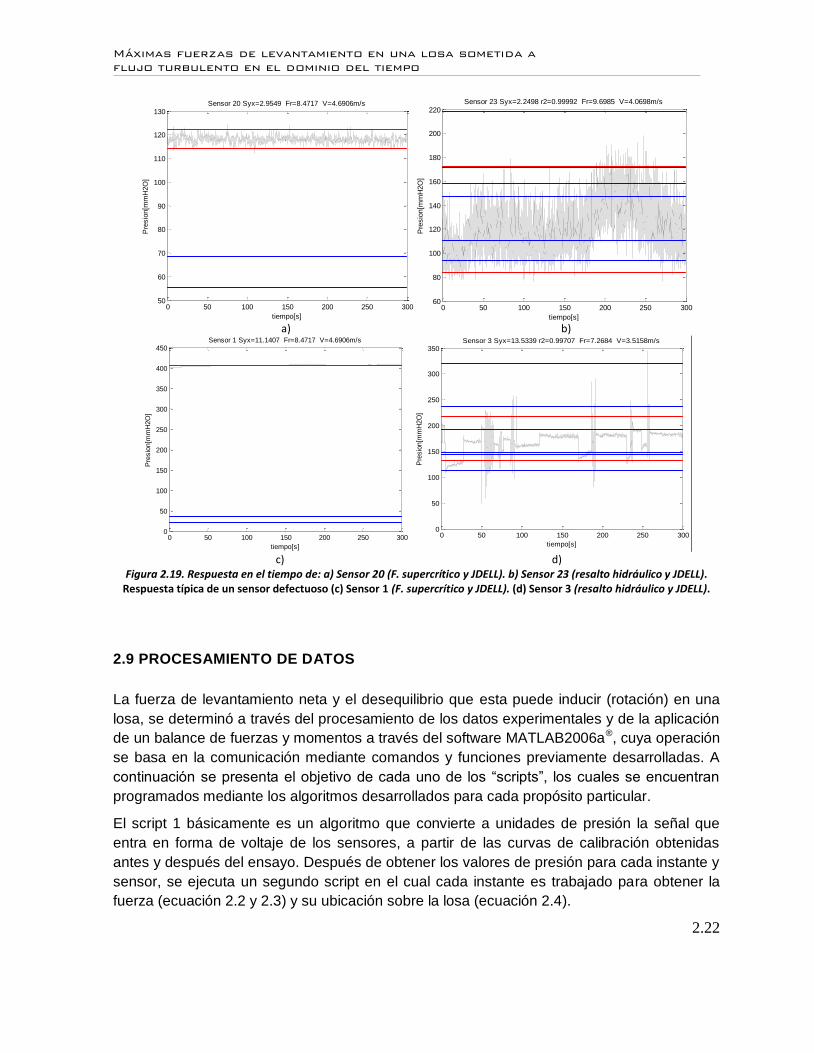
Un sensor con respuesta confiable presenta normalmente oscilaciones de presión alrededor
de cierto valor medio, tal y como se puede observar en la Figura 2.19a y la Figura 2.19b. En
la Figura 2.19 a la línea negra es la respuesta en el tiempo del sensor, las líneas punteadas
rojas el máximo y mínimo de la señal, mientras que las líneas punteadas azules
corresponden a la presión equivalente al promedio de los 3 máximos y mínimos tirantes
medidos durante las pruebas. Entre tanto, la Figura 2.19b es el resultado para la condición
de resalto hidráulico y difiere de la gráfica de flujo supercrítico (Figura 2.19a), ya que se
presentan los 6 tirantes medidos en la losa más no el promedio. En la Figura 2.19c y Figura
2.19d se pueden ver las respuestas típicas de sensores que se averiaron antes, durante o
después de la prueba a la que fueron sometidos. Estos resultados muestran la importancia
de realizar el análisis de manera “manual” en lugar de programarlo, siendo exigente en los
resultados finales, puesto que es muy difícil generalizar y predecir una respuesta errónea de
los sensores defectuosos.
Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.22
a) b)
c) d)
Figura 2.19. Respuesta en el tiempo de: a) Sensor 20 (F. supercrítico y JDELL). b) Sensor 23 (resalto hidráulico y JDELL). Respuesta típica de un sensor defectuoso (c) Sensor 1 (F. supercrítico y JDELL). (d) Sensor 3 (resalto hidráulico y JDELL).
2.9 PROCESAMIENTO DE DATOS
La fuerza de levantamiento neta y el desequilibrio que esta puede inducir (rotación) en una
losa, se determinó a través del procesamiento de los datos experimentales y de la aplicación
de un balance de fuerzas y momentos a través del software MATLAB2006a®, cuya operación
se basa en la comunicación mediante comandos y funciones previamente desarrolladas. A
continuación se presenta el objetivo de cada uno de los “scripts”, los cuales se encuentran
programados mediante los algoritmos desarrollados para cada propósito particular.
El script 1 básicamente es un algoritmo que convierte a unidades de presión la señal que
entra en forma de voltaje de los sensores, a partir de las curvas de calibración obtenidas
antes y después del ensayo. Después de obtener los valores de presión para cada instante y
sensor, se ejecuta un segundo script en el cual cada instante es trabajado para obtener la
fuerza (ecuación 2.2 y 2.3) y su ubicación sobre la losa (ecuación 2.4).
0 50 100 150 200 250 30050
60
70
80
90
100
110
120
130Sensor 20 Syx=2.9549 Fr=8.4717 V=4.6906m/s
tiempo[s]
Pre
sio
n[m
mH
2O
]
0 50 100 150 200 250 30060
80
100
120
140
160
180
200
220Sensor 23 Syx=2.2498 r2=0.99992 Fr=9.6985 V=4.0698m/s
tiempo[s]
Pre
sio
n[m
mH
2O
]
0 50 100 150 200 250 3000
50
100
150
200
250
300
350
400
450Sensor 1 Syx=11.1407 Fr=8.4717 V=4.6906m/s
tiempo[s]
Pre
sio
n[m
mH
2O
]
0 50 100 150 200 250 3000
50
100
150
200
250
300
350Sensor 3 Syx=13.5339 r2=0.99707 Fr=7.2684 V=3.5158m/s
tiempo[s]
Pre
sio
n[m
mH
2O
]
TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.23
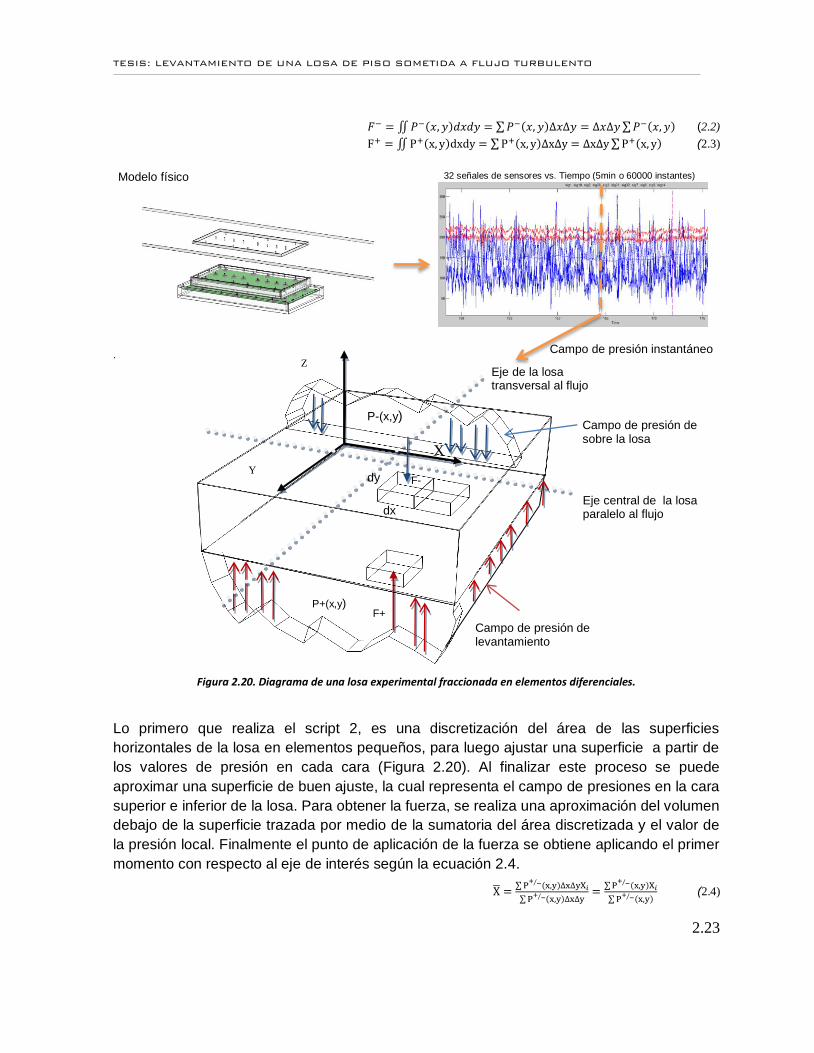
= ∬ = ∑ = ∑ (2.2)
= ∬ = ∑ = ∑ (2.3)
.
Figura 2.20. Diagrama de una losa experimental fraccionada en elementos diferenciales.
Lo primero que realiza el script 2, es una discretización del área de las superficies
horizontales de la losa en elementos pequeños, para luego ajustar una superficie a partir de
los valores de presión en cada cara (Figura 2.20). Al finalizar este proceso se puede
aproximar una superficie de buen ajuste, la cual representa el campo de presiones en la cara
superior e inferior de la losa. Para obtener la fuerza, se realiza una aproximación del volumen
debajo de la superficie trazada por medio de la sumatoria del área discretizada y el valor de
la presión local. Finalmente el punto de aplicación de la fuerza se obtiene aplicando el primer
momento con respecto al eje de interés según la ecuación 2.4.
=∑
⁄
∑ ⁄
=∑
⁄
∑ ⁄
(2.4)
Z
X Y
Eje central de la losa paralelo al flujo
Eje de la losa transversal al flujo
dx
dy
P-(x,y)
P+(x,y) F+
F-
Modelo físico 32 señales de sensores vs. Tiempo (5min o 60000 instantes)
Campo de presión instantáneo
Campo de presión de levantamiento
Campo de presión de sobre la losa

Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.24
Figura 2.21. Diagrama de una losa experimental expuesta al flujo, con la ubicación de las fuerzas de presión resultantes arriba y abajo de sus caras horizontales.
A partir de las fuerzas y puntos de aplicación ya encontrados al ejecutar el script anterior,
Figura 2.21, se utiliza el tercer script el cual se clasificó en 3A y 3B. A continuación se
describe cada uno de ellos.
El script 3A trabaja a partir de las fuerzas y puntos de aplicación ya encontrados al ejecutar
el script 2, el cual previamente trabajo los datos de 16 sensores arriba de la losa y 16 debajo
de ella. El algoritmo del script 3A plantea un cálculo de momentos con respecto a las aristas
inferiores de la losa transversal, definiendo como momento positivo aquel en sentido de las
manecillas del reloj (ecuación 2.5). La fuerza o momento neto se obtiene de la sumatoria de
momentos o fuerzas. Por último, el script imprime los resultados y clasifica los instantes
según la inestabilidad más crítica sobre la losa, es decir que busca los instantes en donde se
generaron las fuerzas máximas de levantamiento netas, los mayores momentos netos y los
mayores desfases de la ubicación de la fuerza con respecto al centroide de la losa (xc).
⁄ =
⁄ (2.5)
El script 3B opera de forma similar al script 3A, con la diferencia que solo trabaja sobre los
campos de presión debajo de la losa, limitándose a encontrar F+ y el punto de aplicación. El
procesamiento de datos con el script 3B se asocia a la condición del modelo en donde se
realiza la medición de la presión con 24 sensores debajo de la losa.
Los resultados procesados con el script 3A (FNM, MaNM, McNM), la máxima fuerza neta (FNM),
el momento neto más grande con respecto a la junta transversal trasera (MaNM) y normal
delantera (McNM), fueron expresados en términos de coeficientes de inestabilidad netos (FNM*,
MaNM*, McNM
*) al adimensionarlos respecto a la fuerza que puede ejercer la presión dinámica
del flujo incidente aplicada en el centro de gravedad de la losa ( , ,
F-
Arista trasera normal al flujo
Arista derecha paralela al flujo
Eje central de la losa paralelo al flujo
Eje central de la losa normal al flujo
Flujo Z
Y
X
F+
Brazo
TESIS: LEVANTAMIENTO DE UNA LOSA DE PISO SOMETIDA A FLUJO TURBULENTO
2.25
). Los resultados procesados con el script 3B, la máxima fuerza debajo de la
losa (F+), el momento más grande con respecto a la junta transversal trasera Ma+ y respeto a
la junta normal delantera (Mc+), fueron expresados en términos adimensionales (F*, Ma* y
Mc*) respecto a la fuerza que genera la presión hidrostática media debajo de la losa ( ,
).
2.10 EFECTOS DE ESCALA
Para asegurar que el modelo represente adecuadamente al prototipo, es necesario que
exista similitud geométrica, cinemática y dinámica.
Los efectos viscosos pueden conllevar a efectos de escala, marcando diferencias al
establecerse similitud entre el comportamiento del modelo y el prototipo real, especialmente
en los modelos con base a Froude donde el número de Reynolds es siempre menor que en
el prototipo (Khatsuria; 2005). Sin embargo, los efectos viscosos pueden ser superados o al
menos minimizar su influencia, implementando en el modelo algunos parámetros como la
escala adecuada, altos números de Reynolds y un límite mínimo en los tirantes (Novak et al.,
2007).
Para flujo supercrítico los efectos viscosos pueden afectar la capa límite, la cual crece en
función del número de Reynolds y la rugosidad relativa de la frontera. En un modelo con
base a Froude, el factor de escala de la rugosidad de Manning (nManning=Lr^1/6), busca la
similitud con la textura y la forma de la superficie del prototipo (Chanson, 1999), limitando la
escala geométrica. Cuando este parámetro no tiene similitud, puede ocurrir que el modelo
sea más áspero que su prototipo, generando efectos de escala. Por lo anterior, se deben
considerar números de Reynolds altos que ayuden a minimizar las perdidas por fricción y la
afectación sobre coeficientes de arrastre, recordando mantener la similitud en la rugosidad
con el tamaño del modelo y sus materiales. Por último, la profundidad del flujo debe ser
siempre más de 15 mm para eliminar el efecto de la tensión superficial (Khatsuria; 2005).
Para resalto hidráulico, cuando los remolinos grandes son bien reproducidos en un modelo,
se logra con mayor aproximación la representación de la turbulencia (Khatsuria; 2005),
debido a que estos son los transportadores de energía (Liu y Li, 2007). Los remolinos
grandes en un flujo turbulento, son proporcionales a la dimensión principal del campo de flujo
y su correcta simulación se asegura mediante un modelo geométricamente similar
(Khatsuria; 2005). No obstante para no alterar el flujo principal, se debe tener cuidado con
los pequeños remolinos viscosos que disipan la energía, siendo importante seguir algunos
parámetros para hacerlos despreciables. Los parámetros recomendados por algunos
investigadores que han analizado la ley de similitud para flujo supercrítico y resalto hidráulico
alrededor de los efectos de escala, sugieren establecer similitud de Froude en el modelo bajo
una completa turbulencia (JiJian et al. 2008), con una escala geométrica más generosa que

Máximas fuerzas de levantamiento en una losa sometida a
flujo turbulento en el dominio del tiempo
2.26
1:50 (Chanson, 1999), una altura mínima de 3 cm de columna de H2O y con números de
Reynolds del flujo incidente no muy bajos de 100.000 (Lopardo; 2010, 1999).
El modelo físico desarrollado para el presente estudio, consta de un canal con paredes en
acrílico, para experimentaciones con velocidades entre 2.3 m/s y 5.5 m/s, el cual se mantuvo
en régimen de flujo turbulento con números de Reynolds entre 90.000 y 200.000, trabajando
entre los rangos recomendados. Las aperturas del orificio de la compuerta vertical fueron
variadas entre 2.5 y 5.5 cm, alcanzando números de Froude entre 3.5 y 16.5.
De acuerdo a los anteriores parámetros y a pesar de que el modelo fue desarrollado para
investigación básica sobre el levantamiento de revestimientos, es posible hacer uso de los
resultados de los análisis para obras reales, a partir de la similitud de Froude para una
relación geométrica más generosa que 1:30, limitada por las dimensiones usadas para
simular las juntas de dilatación (0.5, 1, 1.5, 2 mm). Siendo más estrictos, se deben filtrar
aquellos datos con tirantes menores a 3 cm y para establecer similitud entre la rugosidad
implementada en el contorno general del modelo y el prototipo, la escala geométrica debe
ser de 1:14, la cual cumple bajo la similitud de Froude, la semejanza entre la rugosidad en el
prototipo revestido en concreto (nManning=0.014) y el modelo revestido en acrílico
(nManning=0.009).





























