Embed Size (px)
Citation preview

4C A P Í T U L O
157
Equilibrio de cuerpos rígidos

158
CAPÍTULO 4 EQUILIBRIO DECUERPOS RÍGIDOS
4.1 Introducción4.2 Diagrama de cuerpo libre4.3 Reacciones en los puntos de apoyo
y conexiones de una estructurabidimensional
4.4 Equilibrio de un cuerpo rígido endos dimensiones
4.5 Reacciones estáticamenteindeterminadas. Restriccionesparciales
4.6 Equilibrio de un cuerpo sujeto ados fuerzas
4.7 Equilibrio de un cuerpo sujeto atres fuerzas
4.8 Equilibrio de un cuerpo rígido entres dimensiones
4.9 Reacciones en puntos de apoyo yconexiones para una estructuratridimensional
4.1. IN TRO DUC CIÓN
En el ca pí tu lo an te rior se vio que las fuer zas ex ter nas que ac túan so -bre un cuer po rí gi do pue den re du cir se a un sis te ma fuer za-par en unpun to ar bi tra rio O. Cuan do la fuer za y el par son igua les a ce ro, lasfuer zas ex ter nas for man un sis te ma equi va len te a ce ro y se di ce que elcuer po rí gi do se en cuen tra en equi li brio.
Por tan to, las con di cio nes ne ce sa rias y su fi cien tes pa ra el equi li -brio de un cuer po rí gi do se pue den ob te ner igua lan do a ce ro a R y aMR
O en las re la cio nes (3.52) de la sec ción 3.17:
�F � 0 � MO � �(r � F) � 0 (4.1)
Si se des com po ne ca da fuer za y ca da mo men to en sus com po -nen tes rec tan gu la res, se pue den ex pre sar las con di cio nes ne ce sa riasy su ficien tes pa ra el equi li brio de un cuer po rí gi do por me dio de lasseis ecua cio nes es ca la res que se pre sen tan a con ti nua ción:
�F x � 0 �Fy � 0 �Fz � 0 (4.2)�M x � 0 �M y � 0 �Mz � 0 (4.3)
Las ecua cio nes ob te ni das se pue den em plear pa ra de ter mi nar fuer-zas des co no ci das que es tán apli ca das so bre el cuer po rí gi do o reac cio -nes des co no ci das ejer ci das so bre és te por sus pun tos de apo yo. Se ob -ser va que las ecua cio nes (4.2) expre san el he cho de que las com po nen -tes de las fuer zas ex ter nas en las di rec cio nes x, y y z es tán en equilibrio;las ecua cio nes (4.3) ex pre san a su vez que los mo men tos de las fuer -zas ex ter nas con res pec to a los ejes x, y y z tam bién es tán en equili-brio. Por tan to, pa ra un cuer po rí gi do en equi li brio el sis te ma de fuer -zas ex ter nas no le im par ti rá un mo vi miento tras la cio nal o ro ta cio nal alcuer po en con si de ra ción.
Pa ra po der es cri bir las ecua cio nes de equi li brio pa ra un cuer porí gi do, es esen cial iden ti fi car pri me ro to das las fuer zas que ac túan so -bre di cho cuer po y, en ton ces, di bu jar el dia gra ma de cuer po li bre co -rres pon dien te. En es te ca pí tu lo se con si de ra rá pri me ro el equi li briode es truc tu ras bi di men sio na les su je tas a fuer zas con te ni das en sus pla -nos y se apren de rá có mo di bu jar sus dia gra mas de cuer po li bre. Ade -más de las fuer zas apli ca das so bre una es truc tu ra, se con si de ra rán lasreac cio nes ejer ci das so bre es ta úl ti ma por sus pun tos de apo yo. Se aso -cia rá un ti po es pe cí fi co de reac ción con ca da ti po de apo yo. Se apren -de rá có mo de ter mi nar si una es truc tu ra es tá apo ya da apro pia da men -te, de for ma que se pue da sa ber de an te ma no si las ecua cio nes deequi li brio po drán re sol ver se pa ra de ter mi nar las fuer zas y reac cio nesdes co no ci das.
En la úl ti ma par te del ca pí tu lo se con si de ra rá el equi li brio de es -truc tu ras tri di men sio na les y se rea li za rá el mis mo ti po de aná li sis pa raes tas es tru ctu ras y pa ra sus pun tos de apo yo.

4.2. Diagrama de cuerpo libre 1594.2. DIA GRA MA DE CUER PO LI BRE
Al re sol ver un pro ble ma re la cio na do con el equi li brio de un cuer po rí gi do es esen cial que se con si de ren to das las fuer zas que ac túan so breés te; ade más, es im por tan te ex cluir cual quier fuer za que no es té da dadi rec ta men te so bre di cho cuer po. Omi tir o agre gar una fuer za ex tra ñapo dría des truir las con di cio nes de equi li brio. Por tan to, el pri mer pa soen la so lu ción del pro ble ma es es que ma ti zar un dia gra ma de cuer po li -bre del cuer po rí gi do en con si de ra ción. Los dia gramas de cuer po li breya fue ron uti li za dos en mu chas oca sio nes en el ca pí tu lo 2. Sin em bar -go, en vis ta de su im por tan cia pa ra la so lu ción de pro ble mas de equi li -brio, aquí se re su men los di fe ren tes pa sos que se de ben se guir al mo -men to de di bu jar un dia gra ma de cuer po li bre.
1. Se de be to mar una de ci sión acer ta da en re la ción con la se lec -ción del cuer po li bre que se rá uti li za do. Des pués se de be se -pa rar al cuer po del sue lo y de to dos los de más cuer pos. Así, serea li za un cro quis del con tor no del cuer po ya ais la do.
2. To das las fuer zas ex ter nas de ben in di car se en el dia gra ma de cuer po li bre. Es tas fuer zas re pre sen tan las ac cio nes ejer -ci das so bre el cuer po li bre po r el sue lo y por los cuer pos quehan si do se pa ra dos del mis mo; es tas fuer zas de ben apli car seen los di ver sos pun tos so bre los que el cuer po li bre es ta baapo ya do en el sue lo o es ta ba co nec ta do a otros cuer pos. Tam -bién se de be in cluir en tre las fuer zas ex ter nas el pe so del cuer -po li bre, pues to que re pre sen ta la atrac ción ejer ci da por laTie rra so bre las dis tin tas par tí cu las que lo cons ti tu yen. Co mose ve rá en el ca pí tu lo 5, el pe so de be apli car se en el cen trode gra ve dad del cuer po. Cuan do el cuer po li bre es tá cons ti -tui do por va rias par tes, las fuer zas que di chas par tes ejer cenen tre sí no de ben in cluir se en tre las fuer zas ex ter nas; siem -pre que se con si de re com ple to al cuer po li bre, son fuer zas in -ter nas.
3. Las mag ni tu des y las di rec cio nes de las fuer zas ex ter nas queson co no ci das de ben se ña lar se con cla ri dad en el dia gra ma decuer po li bre. Cuan do se in di quen las di rec cio nes de di chasfuer zas, se de be re cor dar que és tas son las ejer ci das so bre, yno por, el cuer po li bre. Por lo ge ne ral, las fuer zas ex ter nas co -no ci das in clu yen el pe so del cuer po li bre y las fuer zas apli ca -das con un pro pó si to en par ti cu lar.
4. Las fuer zas ex ter nas des co no ci das con sis ten en las reac cio nesa tra vés de las cua les el sue lo y otros cuer pos se opo nen a unpo si ble mo vi mien to del cuer po li bre. Las reac cio nes lo obli -gan a per ma ne cer en la mis ma po si ción y, por es ta ra zón, al -gu nas ve ces re ciben el nom bre de fuer zas de res tric ción. Lasreac cio nes se ejer cen en los pun tos don de el cuer po li bre es -tá apo ya do o co nec ta do a otros cuer pos y de ben in di car se concla ri dad. Las reac cio nes se es tu dian con más de ta lle en las sec -cio nes 4.3 y 4.8.
5. El diagrama de cuerpo libre también debe incluir dimensiones,puesto que éstas se pueden necesitar para el cálculo de mo-mentos de fuerzas. Sin embargo, cualquier otro detalle debeomitirse.
Fotografía 4.1 Un diagrama de cuerpo libre deltractor que se muestra en la foto incluiría todaslas fuerzas externas que actúan sobre él: el pesodel tractor, el peso de la carga en la pala y lasfuerzas ejercidas por el suelo sobre las llantas.
Fotografía 4.2 En el capítulo 6 se expondrácómo determinar las fuerzas internas enestructuras hechas de varias piezas conectadas,como las fuerzas en los elementos que soportanla pala del tractor de la fotografía 4.1.

160 Equilibrio de cuerpos rígidos160 Equilibrio de cuerpos rígidos EQUI LI BRIO EN DOS DI MEN SIO NES
4.3. REAC CIO NES EN LOS PUN TOS DE APO YO Y CO NE XIO NES DE UNA ES TRUC TU RA BI DI MEN SIO NAL
En la pri me ra par te de es te ca pí tu lo se con si de ra el equi li brio de unaes truc tu ra bi di men sio nal, es to es, se su po ne que la es truc tu ra que sees tá ana li zan do y las fuer zas apli ca das so bre la mis ma es tán con te ni dasen el mis mo pla no. De la for ma más cla ra, las reac cio nes ne ce sa riaspa ra man te ner a la es truc tu ra en la mis ma po si ción tam bién es ta ráncon te ni das en el mis mo pla no.
Las reac cio nes ejer ci das so bre una es truc tu ra bi di men sio nal pue -den ser di vi di das en tres gru pos que co rres pon den a tres ti pos de apo -yos (pun tos de apo yo) o co ne xio nes:
1. Reac cio nes equi va len tes a una fuer za con una lí nea de ac ciónco no ci da. Los apo yos y las co ne xio nes que ori gi nan reac cio nesde es te ti po in clu yen ro di llos, ba lan ci nes, su per fi cies sin fric -ción, es la bo nes o bie las y ca bles cor tos, co lla ri nes so bre ba rrassin fric ción y per nos sin fric ción en ra nu ras li sas. Ca da uno dees tos apo yos y co ne xio nes pue den im pe dir el mo vi mien to só -lo en una di rec ción. Los apo yos men cio na dos an te rior men tejun to con las reac cio nes que producen se muestran en la figura4.1. Cada una de estas reacciones in vo lu cra a una so la in cóg -ni ta, es de cir, la mag ni tud de la reac ción; di cha mag ni tud de -be re pre sen tar se con una le tra apro pia da. La lí nea de ac ciónde la reac ción es co no ci da y de be in di car se con cla ri dad en eldia gra ma de cuer po li bre. El sen ti do de la reac ción de be serco mo se mues tra en la fi gu ra 4.1 pa ra los ca sos de una su per -fi cie sin fric ción (ha cia el cuer po li bre) o de un ca ble (ale ján -do se del cuer po li bre). La reac ción pue de es tar di ri gi da en unou otro sen ti do en el ca so de ro di llos de do ble ca rril, es la bo nes,co lla ri nes so bre ba rras y per nos en ra nu ras. Por lo ge ne ral, losro di llos de un ca rril y los ba lan ci nes son re ver si bles y, por tan -to, las reac cio nes co rres pon dien tes tam bién pue den es tar di -ri gi das en uno u otro sen ti do.
2. Reac cio nes equi va len tes a una fuer za de mag ni tud y di rec cióndes co no ci das. Los apo yos y las co ne xio nes que ori gi nan reac -cio nes de es te ti po in clu yen per nos sin fric ción en ori fi ciosajus ta dos, ar ti cu la ciones o bi sa gras y su per fi cies ru go sas. És -tos pue den im pe dir la tras la ción del cuer po rí gi do en to dasdi rec cio nes pe ro no pue den im pe dir la ro ta ción del mis mocon res pec to a la co ne xión. Las reac cio nes de es te gru po in -vo lu cran dos in cóg ni tas que usual men te se re pre sen tan porsus com po nen tes x y y. En el ca so de una su per fi cie ru go sa,la com po nen te per pen di cu lar a la su per fi cie de be di ri gir se ale -ján do se de és ta.
3. Reac cio nes equi va len tes a una fuer za y un par. Es tas reac cio -nes se ori gi nan por apo yos fi jos, los cua les se opo nen a cual quiermo vi mien to del cuer po li bre y, por tan to, lo res trin gen por com -ple to. Los so por tes fi jos pro du cen fuer zas so bre to da la su per -fi cie de con tac to; sin em bar go, es tas fuer zas for man un sis te maque se pue de re du cir a una fuer za y un par. Las reac cio nes dees te gru po in vo lu cran tres in cóg ni tas, las cua les con sis ten en lasdos com po nen tes de la fuer za y en el mo men to del par.
Fotografía 4.3 Cuando el eslabón delmecanismo de apertura del toldo para ventana seextiende, la fuerza que éste ejerce sobre eldeslizador produce una fuerza normal aplicadasobre la barra, lo que causa que el toldo se abra.
Fotografía 4.4 El apoyo oscilatorio del estribomontado, que se muestra en la fotografía, se usapara apoyar el camino sobre un puente.
Fotografía 4.5 Se muestra la expansión delapoyo oscilatorio de un puente con plataforma detrabes. La superficie convexa del oscilador lepermite al apoyo de la trabe moverse en formahorizontal.

4.3. Reacciones en los puntos de apoyo yconexiones de una estructura bidimensional
Cuan do el sen ti do de una fuer za o un par des co no ci do no es evi -den te, no se de be in ten tar de ter mi nar lo. En lu gar de ello, se su pon dráar bi tra ria men te el sen ti do de la fuer za o el par; el sig no de la su po si -ción ob te ni da in di ca rá si la res pues ta fue co rrec ta o no.
Apoyo o conexión Reacción Número deincógnitas
Rodillos o patines Balancín Superficiesin fricción
Fuerza con líneade acción conocida
Fuerza con líneade acción conocida
Fuerza con líneade acción conocida
1
1
1
Cable corto Eslabón corto
Collarín sobre unabarra sin fricción
Perno sin fricciónen una ranura lisa
90º
Perno sin fricción,articulación o bisagra
Superficie rugosa Fuerza de direccióndesconocida
o
o
2
Apoyo fijo Fuerza y par
3
a
a
Figura 4.1 Reacciones en apoyos y conexiones.
161

162 Equilibrio de cuerpos rígidos162 Equilibrio de cuerpos rígidos 4.4. EQUI LI BRIO DE UN CUER PO RÍ GI DO EN DOS DI MEN SIO NES
Las con di cio nes es ta ble ci das en la sec ción 4.1 pa ra el equi li brio de uncuer po rí gi do se vuel ven más sim ples pa ra ca sos de es truc tu ras bi di -men sio na les. Al se lec cio nar a los ejes x y y en el pla no de la es truc tu -ra, se tie ne que
Fz � 0 Mx � My � 0 Mz � MO
pa ra ca da una de las fuer zas apli ca das so bre la es truc tu ra. Por tan to, lasseis ecua cio nes de equi li brio de ri va das en la sec ción 4.1 se re du cen a
�F x � 0 �F y � 0 � MO � 0 (4.4)
y a las tres iden ti da des tri via les 0 � 0. Co mo se de be cum plir que �MO
� 0 sin im por tar la elec ción del ori gen O, se pue den es cri bir las ecua -cio nes de equi li brio pa ra una es truc tu ra bi di men sio nal en la for ma másge ne ral
�F x � 0 �F y � 0 � MA � 0 (4.5)
don de A es cual quier pun to en el pla no de la es truc tu ra. Las tres ecua -cio nes ob te ni das pue den re sol ver se pa ra un má xi mo de tres in cógni tas.
En la sec ción an te rior se vio que las fuer zas des co no ci das in clu yenreac cio nes y que el nú me ro de in cóg ni tas co rres pon dien tes a una reac -ción de pen de del ti po de apo yo o co ne xión que ori gi na di cha reac ción.Co mo se hi zo re fe ren cia en la sec ción 4.3, se ob ser va que las ecua cio -nes de equi li brio (4.5) pue den ser em plea das pa ra de ter mi nar las reac -cio nes aso cia das con dos ro di llos y un ca ble, un apo yo fi jo o un ro di lloy un per no en un ori fi cio ajus ta do, et cé te ra.
Observe la fi gu ra 4.2a, en la cual la ar ma du ra mos tra da es tá so me -ti da a las fuer zas da das P, Q y S. La ar ma du ra se man tie ne en su lu -gar por me dio de un per no en A y un ro di llo en B. El per no im pi deque el pun to A se mue va ejer cien do una fuer za so bre la ar ma du ra quese pue de des com po ner en las com po nen tes Ax y Ay; por su par te, elro di llo im pi de que la ar ma du ra ro te con res pec to a A ejer cien do lafuer za ver ti cal B. El dia gra ma de cuer po li bre de la ar ma du ra se mues -tra en la fi gu ra 4.2b; és te in clu ye tan to las reac cio nes Ax, Ay y B co molas fuer zas apli ca das P, Q y S y el pe so W de la ar ma du ra. Pa ra ex pre -sar que la su ma de los mo men tos con res pec to a A, que im pli ca to daslas fuer zas mos tra das en la fi gu ra 4.2b, es igual a ce ro, se es cri be laecua ción �MA � 0, la cual pue de uti li zar se pa ra de ter mi nar la mag -ni tud B pues to que di cha ecua ción no con tie ne a Ax o a Ay. Des pués,pa ra in di car que la su ma de las com po nen tes x y y de las fuer zas sonigua les a ce ro, se es cri ben las ecua cio nes �Fx � 0 y �Fy � 0, a par tirde las cua les se ob tie nen, res pec ti va men te, las com po nen tes Ax y Ay.
Se po dría ob te ner una ecua ción adi cio nal ex pre san do que la su made mo men tos de las fuer zas ex ter nas con res pec to a un pun to dis tin tode A es igual a ce ro. Por ejem plo, se po dría es cri bir �MB � 0. Sin em -bar go, una ex pre sión de ese ti po no con ten dría nin gu na in for ma ciónnue va, pues to que ya se ha es ta ble ci do que el sis te ma de fuer zas mos -tra do en la fi gu ra 4.2b es equi va len te a ce ro. Por tan to, la ecua ción adi -cio nal no se ría in de pen dien te y no po dría uti li zar se pa ra de ter mi nar unacuar ta in cóg ni ta. Sin em bar go, es ta ecua ción ser vi ría pa ra ve ri fi car la so -lu ción ob te ni da a par tir de las tres ecua cio nes de equi li brio ori gi na les.
A pe sar de que no se pue den po ner ecua cio nes adi cio na les a lastres ecua cio nes de equi li brio ori gi na les, cual quie ra de és tas pue de ser
Figura 4.2
C
A B
D
P Q S
a)
C
A B
D
b)
Py Qy Qx
SySx
W
Px
B
Ax
Ay
4.5. Reacciones estáticamente indeterminadas. Restricciones parciales
Figura 4.3
reem pla za da por otra. De es ta for ma, un sis te ma al ter na ti vo de ecua -cio nes de equi li brio es
�F x � 0 � MA � 0 �MB � 0 (4.6)
don de el se gun do pun to con res pec to al cual se su man los mo men tos(en es te ca so, el pun to B) no pue de es tar ubi ca do en la lí nea pa ra le laal eje y que pa sa a tra vés del pun to A (fi gu ra 4.2b). Es tas ecua cio nesson con di cio nes su fi cien tes pa ra el equi li brio de la ar ma du ra. Las pri -me ras dos ecua cio nes in di can que las fuer zas ex ter nas de ben re du cir -se a una so la fuer za ver ti cal en A. Co mo la ter ce ra ecua ción re quie reque el mo men to de es ta fuer za sea igual a ce ro con res pec to al pun toB, el cual no es tá so bre su lí nea de ac ción, la fuer za de be ser igual ace ro y el cuer po rí gi do es tá en equi li brio.
Un ter cer po si ble con jun to de ecua cio nes de equi li brio es
�MA � 0 �M B � 0 �MC � 0 (4.7)
don de los pun tos A, B y C no son co li nea les (fi gu ra 4.2b). La pri me raecua ción re quie re que las fuer zas ex ter nas se re duz can a una so la fuer -za en A; la se gun da ecua ción re quie re que es ta fuer za pa se a tra vés deB y la ter ce ra ecua ción re quie re que pa se a tra vés de C. Co mo los pun -tos A, B y C no son co li nea les, la fuer za de be ser igual a ce ro y el cuer -po rí gi do es tá en equi li brio.
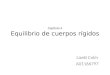
La ecua ción �MA � 0, la cual ex pre sa que la su ma de los mo men tosde las fuer zas con res pec to al per no A es igual a ce ro, po see un sig ni fı ca -do fí si co más de fı ni do que cual quie ra de las otras dos ecua cio nes (4.7).És tas ex pre san una idea si mi lar de ba lan ce pe ro lo ha cen con res pec to apun tos en los cua les el cuer po rí gi do no es tá real men te ar ti cu la do. Sinem bar go, di chas ecua cio nes son tan úti les co mo la pri me ra y la se lec ciónde las ecua cio nes de equi li brio no de be es tar in de bi da men te in flui da porel sig ni fi ca do fí si co de las mis mas. De he cho, en la prác ti ca se rá de sea -ble ele gir ecua cio nes de equi li brio que con ten gan una so la in cóg ni ta,pues to que así se eli mi na la ne ce si dad de re sol ver ecua cio nes si mul tá -neas. Es po si ble ob te ner ecua cio nes de una so la in cóg ni ta al su mar mo -men tos con res pec to al pun to de in ter sec ción de las lí neas de ac ción dedos fuer zas des co no ci das o, si di chas fuer zas son pa ra le las, su mar las com -po nen tes per pen di cu la res a esa di rec ción co mún. Por ejem plo, en la fi -gu ra 4.3, en la cual la ar ma du ra mos tra da se sos tie ne por ro di llos en A yB y por un es la bón cor to en D, las reac cio nes en A y B pue den eli mi nar -se con la su ma de las com po nen tes x. Las reac cio nes en A y D se eli mi -nan al su mar mo men tos con res pec to a C, y las reac cio nes en B y D su -man do mo men tos con res pec to a D. Las ecua cio nes ob te ni das son
�F x � 0 �M C � 0 �MD � 0
Ca da una de es tas ecua cio nes con tie ne una so la in cóg ni ta.
4.5. REAC CIO NES ES TÁ TI CA MEN TE IN DE TER MI NA DAS. RES TRIC CIO NES PAR CIA LES
En los dos ejem plos con si de ra dos en la sec ción an te rior (fi gu ras 4.2 y4.3), los ti pos de apo yos usa dos fue ron ta les que era im po si ble que elcuer po rí gi do se mo vie ra ba jo la ac ción de las car gas da das o ba jo cual -quier otra con di ción de car ga. En ca sos co mo és tos, se di ce que el cuer -po rí gi do tie ne res tric ción com ple ta. Tam bién se de be re cor dar que las
C
A B
D
D
P Q S
a)
C
A B
D
b)
Py QyQx
SySx
A
W
Px
B
163

164 Equilibrio de cuerpos rígidos164 Equilibrio de cuerpos rígidos reac cio nes co rres pon dien tes a es tos apo yos in vo lu cra ban tres in cóg ni -tas, las cua les po dían de ter mi nar se re sol vien do las tres ecua cio nes deequi li brio. Cuan do se pre sen ta una si tua ción co mo és ta, se di ce queson reac cio nes es tá ti ca men te de ter mi na das.
En la fi gu ra 4.4a la ar ma du ra mos tra da se sos tie ne por per nos en Ay B. Es tos apo yos pro por cio nan más res tric cio nes de las ne ce sa rias pa raevi tar que la ar ma du ra se mue va ba jo la ac ción de las car gas da das o ba jo cual quier otra con di ción de car ga. Tam bién se ob ser va a par tir deldia gra ma de cuer po li bre de la fi gu ra 4.4b que las reac cio nes co rres pon -dien tes in vo lu cran cua tro in cóg ni tas. Pues to que, co mo se se ña ló en lasec ción 4.4, só lo es tán dis po ni bles tres ecua cio nes de equi li brio in de pen -dien tes, se tie nen más in cóg ni tas que ecua cio nes; por tan to, no se pue -den de ter mi nar to das las in cóg ni tas. Mien tras que las ecua cio nes �MA
� 0 y �MB � 0 pro por cio nan, res pec ti va men te, las com po nen tes ver ti -ca les By y Ay, la ecua ción �Fx � 0 só lo pro por cio na la su ma Ax � Bx delas com po nen tes ho ri zon ta les de las reac cio nes en A y B. Se di ce que lascom po nen tes Ax y Bx son es tá ti ca men te in de ter mi na das. És tas pue dende ter mi nar se con si de ran do las de for ma cio nes oca sio na das en la ar ma du -ra por la con di ción de car ga da da, pe ro es te mé to do es tá fue ra del al can -ce de la es tá ti ca y co rres pon de al es tu dio de la me cá ni ca de ma te ria les.
Los apo yos usa dos pa ra sos te ner la ar ma du ra mos tra da en la fi gu -ra 4.5a con sis ten en los ro di llos en A y B. Es evi den te que las res tric -cio nes pro por cio na das por es tos apo yos no son su fi cien tes pa ra im pe -dir que la ar ma du ra se mue va. Aun que se im pi de cual quier mo vi mien tover ti cal, no hay na da que evi te que la ar ma du ra pue da mo ver se en for -ma ho ri zon tal. Ba jo es tas cir cuns tan cias, se di ce que la ar ma du ra tie -ne res tric ción par cial.† En la fi gu ra 4.5b se ob ser va que las reac cio nesen A y B só lo in vo lu cran dos in cóg ni tas. Co mo aún se tie nen que cum -plir tres ecua cio nes de equi li brio, hay me nos in cóg ni tas que ecua cio nesy, en ge ne ral, una de las ecua cio nes de equi li brio no se cum pli rá. Mien -tras que las ecua cio nes �MA � 0 y �MB � 0 se pue den cum plir porme dio de una se lec ción apro pia da de las reac cio nes en A y B, la ecua -ción �Fx � 0 no se rá sa tis fe cha a me nos que la su ma de las com po -nen tes ho ri zon ta les de las fuer zas apli ca das sea igual a ce ro. Por tan -to, no se pue de man te ner el equi li brio de la ar ma du ra de la fi gu ra 4.5ba jo con di cio nes ge ne ra les de car ga.
De lo an te rior se con clu ye que si un cuer po rígi do tie ne res tric -ción com ple ta y si las reac cio nes en sus apo yos son es tá ti ca men te de -ter mi na das, en ton ces ha brá tan tas in cóg ni tas co mo ecua cio nes de equi -li brio. Cuan do es ta con di ción no se cum ple, se tie ne la cer te za de queel cuer po rí gi do no es tá com ple ta men te res trin gi do o de que las reac -cio nes en sus apo yos no son es tá ti ca men te de ter mi na das; ade más, tam -bién es po si ble que el cuer po rí gi do no es té com ple ta men te res trin gi -do y que las reac cio nes sean es tá ti ca men te in de ter mi na das.
Sin em bar go, se de be se ña lar que la con di ción ya men cio na da, aun -que es ne ce sa ria, no es su fi cien te. En otras pa la bras, el he cho de queel nú me ro de in cóg ni tas sea igual al nú me ro de ecua cio nes no ga ran -ti za que el cuer po ten ga res tric ción com ple ta o que las reac cio nes ensus apo yos son es tá ti ca men te de ter mi na das. Ob ser ve la fi gu ra 4.6a enla cual la ar ma du ra mos tra da se sos tie ne por me dio de ro di llos en A,
Figura 4.4 Reacciones estáticamenteindeterminadas.
Figura 4.5Restricciones parciales.
C
A B
D
P Q S
a)
C
A B
D
b)
Py QyQx
SySx
Bx
By
Ax
Ay
W
Px
C
A B
D
P Q S
a)
C
A B
D
b)
Py QyQx
SySx
A
W
Px
B †En oca sio nes se ha ce re fe ren cia a los cuer pos con res tric ción par cial co mo ines ta bles.Sin em bar go, pa ra evi tar con fu sio nes en tre es te ti po de ines ta bi li dad, de bi da a un nú me roin su fi ciente de res tric cio nes y el tipo de ines ta bi li dad con si de ra da en el ca pí tu lo 10, la cuales tá re la cio nada con el com por ta mien to de un cuer po rí gi do cuan do se per tur ba su equi -li brio, se re ser va rá el uso de las pa la bras es ta ble e ines ta ble pa ra es te úl ti mo ca so.

B y E. A pe sar de que exis ten tres reac cio nes des co no ci das A, B y E(fi gu ra 4.6b), la ecua ción �Fx � 0 no se cum pli rá a me nos que la su -ma de las com po nen tes ho ri zon ta les de las fuer zas apli ca das re sul teigual a ce ro. Aun que hay un nú me ro su fi cien te de res tric cio nes, és tasno es tán ubi ca das de ma ne ra apro pia da y no exis te nin gún im pe di men -to pa ra que la ar ma du ra se mue va ho ri zon tal men te. En es te ca so, sedi ce que la ar ma du ra es tá im pro pia men te res trin gi da. Co mo só lo que -dan dos ecua cio nes de equi li brio pa ra de ter mi nar tres in cóg ni tas, lasreac cio nes se rán es tá ti ca men te in de ter mi na das. Por tan to, las reac cio -nes im pro pias tam bién pro du cen in de ter mi na ción es tá ti ca.
Otro ejem plo de res tric cio nes im pro pias —y de in de ter mi na ciónes tá ti ca— lo pro por cio na la ar ma du ra mos tra da en la fi gu ra 4.7, la cuales tá sos te ni da por un per no en A y por ro di llos en B y C, que en con -jun to in vo lu cran cua tro in cóg ni tas. Co mo só lo se dis po ne de tres ecua -cio nes de equi li brio in de pen dien tes, las reac cio nes en los apo yos sones tá ti ca men te in de ter mi na das. Por otro la do, ob sér ve se que no se pue -de cum plir la ecua ción �MA � 0 ba jo con di cio nes ge ne ra les de car gapues to que las lí neas de ac ción de las reac cio nes B y C pa san a tra vésde A. En ton ces, se con clu ye que la ar ma du ra pue de ro tar al re de dor deA y, por en de, es tá im pro pia men te res trin gi da.†
Los ejem plos de las fi gu ras 4.6 y 4.7 con du cen a la con clu sión deque un cuer po rí gi do es tá im pro pia men te res trin gi do siem pre que losapo yos es tén ubi ca dos de tal for ma que las reac cio nes sean con cu rren teso pa ra le las,‡ aun que pro por cio nen un nú me ro su fi cien te de reac cio nes.
En re su men, pa ra ase gu rar se de que un cuer po rí gi do bi di men sio -nal es tá com ple ta men te res trin gi do y de que las reac cio nes en sus apo -yos son es tá ti ca men te de ter mi na das, se de be ve ri fi car que las reac cio -nes in vo lu cren tres —y só lo tres— in cóg ni tas y que los apo yos es tén ubi -ca dos de ma ne ra que no re quie ran que las reac cio nes sean con cu rren -tes o pa ra le las.
Los apo yos que in vo lu cran reac cio nes es tá ti ca men te in de ter mi na -das de ben uti li zar se con cui da do en el di se ño de es truc tu ras y con ple -no co no ci mien to de los pro ble mas que pue den cau sar. Por otra par te,es usual que el aná li sis de es truc tu ras con reac cio nes es tá ti ca men te in -de ter mi na das se rea li ce en for ma par cial por me dio de los mé to dos dela es tá ti ca. Por ejem plo, en el ca so de la ar ma du ra de la fi gu ra 4.4, lascom po nen tes ver ti ca les de las reac cio nes en A y B se ob tu vie ron a par -tir de las ecua cio nes de equi li brio.
Por ra zo nes ob vias, los apo yos que ori gi nan res tric cio nes par cia leso im pro pias se de ben evi tar en el di se ño de es truc tu ras es ta cio na rias.Sin em bar go, una es truc tu ra res trin gi da en for ma par cial o im pro piano ne ce sa ria men te se co lap sa rá; ba jo cier tas con di cio nes de car ga enpar ti cu lar, se pue de man te ner el equi li brio. Por ejem plo, las ar ma du -ras de las fı gu ras 4.5 y 4.6 es ta rán en equi li brio si las fuer zas apli ca dasP, Q y S son ver ti ca les. Ade más, las es truc tu ras di se ña das pa ra mo ver -se só lo de ben es tar par cial men te res trin gi das. Por ejem plo, un ca rrode fe rro ca rril se ría de po ca uti li dad si es tu vie ra com ple ta men te res trin -gi do por te ner sus fre nos apli ca dos en for ma per ma nen te.
4.5. Reacciones estáticamente indeterminadas. Restricciones parciales
Figura 4.6 Restricciones impropias.
Figura 4.7 Restricciones impropias.
C
A BE
E
D
P Q S
a)
C
A B
D
b)
Py QyQx
SySx
A
W
Px
BE
B
C
Ax
C D
P Q S
a)
C
A B
A B
D
b)
Py QyQx
SySx
Ay
W
Px
†La ro ta ción de la ar ma du ra con res pec to a A re quie re al go de “jue go” en los apo yos enB y C. En la prác ti ca siem pre exis ti rá di cho jue go. Ade más, se ob ser va que si el jue go es mí -ni mo, el des pla za mien to de los ro di llos B y C, y por tan to, las dis tan cias des de A has ta las lí -neas de acción de las reac cio nes B y C, tam bién se rán pe que ñas. Así, la ecua ción �MA � 0re quie re que B y C sean muy gran des, lo cual pue de cau sar la fa lla de los apo yos en B y C.
‡De bi do a que es ta si tua ción sur ge por un arre glo o geo met ría ina de cua dos de los apo -yos, co múnmen te se ha ce re fe ren cia a la mis ma co mo ines ta bi li dad geométrica.
165

166
A
BB
23.5 kN
Ay
A x
9.81 kN
1.5 m
4 m2 m
33.3 kN
107.1 kN
107.1 kN
A
B
23.5 kN
9.81 kN
4 m2 m
1.5 m
2 400 kgA
B
G
4 m2 m
1.5 m
PRO BLE MA RE SUEL TO 4.1
Una grúa fi ja tie ne una ma sa de 1 000 kg y se usa pa ra le van tar una ca ja de2 400 kg. La grúa se man tie ne en su lu gar por me dio de un per no en A y unba lan cín en B. El cen tro de gra ve dad de la grúa es tá ubi ca do en G. De ter -mi ne las com po nen tes de las reac cio nes en A y B.
SO LU CIÓN
Dia gra ma de cuer po li bre. Se di bu ja un dia gra ma de cuer po li brede la grúa. Si mul ti pli ca las ma sas de la grúa y de la ca ja por g � 9.81 m/s2,se ob tie nen sus res pec ti vos pe sos, es to es, 9 810 N o 9.81 kN y 23 500 N o23.5 kN. La reac ción en el per no A es una fuer za con di rec ción des co no ci -da; ésta se re pre sen ta por sus com po nen tes Ax y Ay. La reac ción en el ba -lan cín B es per pen di cu lar a su su per fi cie; por tan to, di cha reac ción es ho ri -zon tal. Se su po ne que Ax, Ay y B ac túan en las di rec cio nes mos tra das en lafi gu ra.
De ter mi na ción de B. Se ex pre sa que la su ma de los mo men tos deto das las fuer zas ex ter nas con res pec to al pun to A es igual a ce ro. La ecua -ción que se ob tie ne no con tie ne a Ax ni a Ay pues to que los mo men tos deAx y Ay con res pec to a A son igua les a ce ro. Si se mul ti pli ca la mag ni tud deca da fuer za por su dis tan cia per pen di cu lar a par tir de A, se es cri be
�l� MA � 0: � B(1.5 m) � (9.81 kN)(2 m) � (23.5 kN)(6 m) � 0B � �107.1 kN B � 107.1 kN n
Co mo el re sul ta do es po si ti vo, la reac ción es tá di ri gi da en la for ma que se su -pu so.
De ter mi na ción de Ax . La mag ni tud de Ax se de ter mi na con la su made las com po nen tes ho ri zon ta les de to das las fuer zas ex ter nas, la cual es iguala ce ro.
n� �F x � 0: Ax � B � 0Ax � 107.1 kN � 0Ax � �107.1 kN Ax � 107.1 kN m
Co mo el re sul ta do es ne ga ti vo, el sen ti do de Ax es opues to al que se ha bíasu pues to ori gi nal men te.
De ter mi na ción de Ay . La su ma de las com po nen tes ver ti ca les tam -bién de be ser igual a ce ro.
�h�F y � 0: Ay � 9.81 kN � 23.5 kN � 0Ay � �33.3 kN Ay � 33.3 kN h
Su man do vec to rial men te las com po nen tes Ax y Ay se en cuen tra que lareac ción en A es 112.2 kN b17.3°.
Com pro ba ción . Los va lo res ob te ni dos pa ra las reac cio nes se pue dencom pro bar re cor dan do que la su ma de los mo men tos de to das las fuer zas ex -ter nas con res pec to a cual quier pun to de be ser igual a ce ro. Por ejem plo,con si de ran do al pun to B, se es cri be
�l�MB � �(9.81 kN)(2 m) � (23.5 kN)(6 m) � (107.1 kN)(1.5 m) � 0

167
PRO BLE MA RE SUEL TO 4.2
Se apli can tres car gas a una vi ga co mo se mues tra en la fi gu ra. La vi ga seapoya en un ro di llo en A y en un per no en B. Sin to mar en cuen ta el pesode la viga, de ter mi ne las reac cio nes en A y B cuan do P � 15 kips.
SO LU CIÓN
Dia gra ma de cuer po li bre . Se di bu ja un dia gra ma de cuer po li brede la vi ga. La reac ción en A es ver ti cal y se re pre sen ta con A. La reac ciónen B se re pre sen ta con las com po nen tes Bx y By. Se su po ne que ca da com -po nen te actúa en la di rec ción mos tra da en la fi gu ra.
Ecua cio nes de equi li brio . Se es cri ben las tres ecua cio nes de equi li -brio si guien tes y se re suel ven pa ra las reac cio nes se ña la das:
n� �Fx � 0: Bx � 0 Bx � 0
�l� MA � 0:�(15 kips)(3 ft) � By(9 ft) � (6 kips)(11 ft) � (6 kips)(13 ft) � 0
By � �21.0 kips By � 21.0 kips h
�l�MB � 0:�A(9 ft) � (15 kips)(6 ft) � (6 kips)(2 ft) � (6 kips)(4 ft) � 0
A � �6.00 kips A � 6.00 kips h
Com pro ba ción . Se com prue ban los re sul ta dos su man do las com po -nen tes ver ti ca les de to das las fuer zas ex ter nas.
�h�Fy � �6.00 kips � 15 kips � 21.0 kips � 6 kips � 6 kips � 0
Ob ser va ció n. En es te pro ble ma las reac cio nes en A y B son ver ti ca -les; sin em bar go, las ra zo nes de lo an te rior son di ver sas. En A la vi ga se apo -ya en un ro di llo; por tan to, la reac ción no pue de te ner una com po nen te ho -ri zon tal. En B, la com po nen te ho ri zon tal de la reac ción es igual a ce ro de bi doa que se de be cum plir la ecua ción de equi li brio �Fx � 0 y a que nin gu na delas otras fuer zas que ac túan so bre la vi ga tie ne una com po nen te ho ri zon tal.
A pri me ra vis ta se hu bie ra po di do ob ser var que la reac ción en B era ver -ti cal y se pu do ha ber omi ti do la com po nen te ho ri zon tal Bx. Sin em bar go, es -ta prác ti ca no es con ve nien te. Al se guir la, se co rre el ries go de ol vi dar a lacom po nen te Bx cuan do las con di cio nes de car ga re quie ran su pre sen cia (es -to es, cuan do se in clu ye una car ga ho ri zon tal). Ade más, se en con tró que lacom po nen te Bx es igual a ce ro uti li zan do y re sol vien do una ecua ción de equi -li brio, �Fx � 0. Al dar por he cho que Bx es igual a ce ro, es po si ble no per -ca tar se de que en rea li dad se ha he cho uso de es ta ecua ción y, por tan to, sepo dría per der la re la ción del nú me ro de ecua cio nes dis po ni bles pa ra re sol -ver el pro ble ma.
3 ft 2 ft 2 ft
6 kips 6 kipsP
6 ft
A B
3 ft 2 ft 2 ft
6 kips15 kips 6 kips
6 ft
By
BxAA
B

168
PRO BLE MA RE SUEL TO 4.3
Un ca rro de car ga se en cuen tra en re po so so bre un ca rril que for ma un án -gu lo de 25° con res pec to a la ver ti cal. El pe so to tal del ca rro y su car ga esde 5 500 lb y és te ac túa en un pun to que se en cuen tra a 30 in. del ca rril yque es equi dis tan te a los dos ejes. El ca rro se sos tie ne por me dio de un ca -ble que es tá uni do a és te en un pun to que se en cuen tra a 24 in. del ca rril.De ter mi ne la ten sión en el ca ble y la reac ción en ca da par de rue das.
SO LU CIÓN
Dia gra ma de cuer po li bre . Se di bu ja el dia gra ma de cuer po li bredel ca rro. La reac ción en ca da rue da es per pen di cu lar al ca rril y la fuer za deten sión T es pa ra le la a és te. Por con ve nien cia se se lec cio na al eje x pa ra le loal ca rril y al eje y per pen di cu lar al mis mo. En ton ces, el pe so de 5 500 lb sedes com po ne en sus com po nen tes x y y.
Wx � �(5 500 lb) cos 25° � �4 980 lbWy � �(5 500 lb) sen 25° � �2 320 lb
Ecua cio nes de equi li brio . Se to man mo men tos con res pec to a A pa -ra eli mi nar a T y a R1 de los cál cu los.
�l� MA � 0: �(2 320 lb)(25 in.) � (4 980 lb)(6 in.) � R2(50 in.) � 0R2 � �1 758 lb R2 � 1 758 lb p
Aho ra, to man do mo men tos con res pec to a B pa ra eli mi nar a T y a R2 de loscál cu los, se es cri be
�l�MB � 0: (2 320 lb)(25 in.) � (4 980 lb)(6 in.) � R1(50 in.) � 0R1 � �562 lb R1 � �562 lb p
El va lor de T se ob tie ne a par tir de
q��Fx � 0: �4 980 lb � T � 0T � �4 980 lb T � 4 980 lb r
Los va lo res en con tra dos pa ra las reac cio nes se mues tran en el cro quis ad -jun to.
Com pro ba ción . Pa ra co rro bo rar los cál cu los se es cri be
p��Fy � �562 lb � 1 758 lb � 2 320 lb � 0
Tam bién pu do ha ber se ve ri fi ca do la so lu ción cal cu lan do los mo men tos conres pec to a cual quier pun to dis tin to de A o de B.
24 in.
25ºG
25 in.
25 in.
30 in.
y
x
R1
R2
2 320 lb 6 in.
A
T
B
G
25 in.
25 in.
4 980 lb
562 lb
1 758 lb
y
x
4 980 lb
25 in.
25 in.
2 320 lb6 in.
A
B
G
4 980 lb

169
PRO BLE MA RE SUEL TO 4.4
El mar co mos tra do en la fi gu ra sos tie ne una par te del te cho de un pe que ñoedi fi cio. Se sa be que la ten sión en el ca ble es de 150 kN, de ter mi ne la reac -ción en el ex tre mo fi jo E.
SO LU CIÓN
Dia gra ma de cuer po li bre . Se di bu ja el dia gra ma de cuer po li bredel mar co jun to con el ca ble BDF. La reac ción en el ex tre mo fi jo E es tá re -pre senta da con las com po nen tes de fuer za Ex y Ey y por el par ME. Las otrasfuer zas que ac túan so bre el dia gra ma de cuer po li bre son las cua tro car gasde 20 kN y la fuer za de 150 kN ejer ci da en el ex tre mo F del ca ble.
Ecua cio nes de equi li brio. Ob ser ve que DF � � (4.5 m�)2 � (6�m)2��7.5 m, se es cri be
n� �Fx � 0: Ex � �47..55�(150 kN) � 0
Ex � �90.0 kN Ex � 90.0 kN z
�h�Fy � 0: Ey � 4(20 kN) � �76.5� (150 kN) � 0
Ey � �200 kN Ey � 200 kNx
�l� ME � 0: (20 kN)(7.2 m) � (20 kN)(5.4 m) � (20 kN)(3.6 m)
� (20 kN)(1.8 m) � �76.5� (150 kN)(4.5 m) � ME � 0
ME � �180.0 kN � m ME � 180.0 kN � m l
PRO BLE MA RE SUEL TO 4.5
Un pe so de 400 lb se une a la pa lan ca mos tra da en la fi gu ra en el pun to A.La cons tan te del re sor te BC es k � 250 lb/in. y és te no se en cuen tra de for -ma do cuan do � � 0. De ter mi ne la po si ción de equi li brio.
SO LU CIÓN
Dia gra ma del cuer po li bre . Se di bu ja el dia gra ma de cuer po li brede la pa lan ca jun to al ci lin dro. Re pre sen te con s la elon ga ción del re sor te apar tir de la po si ción en que és te no se en cuen tra de for ma do y ob ser ve ques � r�, se tie ne que F � ks � kr�.
Ecua ción de equi li brio . Su man do los mo men tos de W y de F conres pec to a O, se es cri be
�l� MO � 0: Wl sen � � r (kr� ) � 0 sen � � �
Sus ti tu yen do los da tos nu mé ri cos que fue ron pro por cio na dos se ob tie ne
sen � ��(25
(400l0b/
libn).()8(3
ini n.).)2
� � sen � � 0.703�
Al re sol ver por prueba y error, se en cuen tra � � 0 � � 80.3°
kr2
�Wl
6 m
150 kNEy
Ex
ME
20 kN 20 kN 20 kN 20 kN
A BC
D
E F
4.5 m
1.8 m 1.8 m 1.8 m 1.8 m
As
OW
F = ks
Ry
Rx
Posición sindeformar
q
r
l sen q
20 kN 20 kN 20 kN 20 kN
A B
C
D
E F1.8 m 1.8 m 1.8 m 1.8 m
2.25 m
3.75 m
4.5 m
AB C
O
k = 250 lb/in.
r = 3 in.
l = 8 in.
W = 400 lb
q
170
R E S O L U C I Ó N D E P R O B L E M A SE N F O R M A I N D E P E N D I E N T E
Se vio que las fuer zas ex ter nas que ac túan so bre un cuer po rí gi do que se en cuen -tra en equi li brio for man un sis te ma equi va len te a ce ro. Pa ra re sol ver un pro ble made equi li brio la pri me ra ta rea con sis te en di bu jar un dia gra ma de cuer po li bre quesea cla ro y de ta ma ño ra zo na ble en el cual se mues tren to das las fuer zas ex ter nas.Se de ben in cluir tan to las fuer zas co no ci das co mo las des co no ci das.
Pa ra un cuer po rí gi do bi di men sio nal, las reac cio nes en los apo yos pue den in vo -lu crar una, dos o tres in cóg ni tas de pen dien do del ti po de apo yo de que se tra te (fi gu ra 4.1). Un dia gra ma de cuer po li bre es esen cial pa ra re sol ver de ma ne ra co -rrec ta un pro ble ma. Nun ca se de be con ti nuar con la so lu ción de un pro ble ma mien -tras no se es té se gu ro de que en el dia gra ma de cuer po li bre es tán pre sen tes to daslas car gas, to das las reac cio nes y el pe so del cuer po (cuan do es to úl ti mo sea apro -pia do).
1. Se pue den es cri bir tres ecua cio nes de equi li brio y re sol ver las pa ra tres in -cóg ni tas. Las tres ecua cio nes pue den ser
�F x � 0 �F y � 0 � MO � 0
Sin em bar go, exis ten va rios con jun tos de ecua cio nes que se pue den es cri bir, ta lesco mo
�F x � 0 � MA � 0 �MB � 0
don de el pun to B se se lec cio na de ma ne ra que la lí nea AB no sea pa ra le la al eje y, o
�MA � 0 �M B � 0 �MC � 0
don de los pun tos A, B y C no se en cuen tran so bre una lí nea rec ta.
2. Pa ra sim pli fi car la so lu ción re sul ta con ve nien te uti li zar al gu na de las téc ni -cas de so lu ción que se pre sen tan a con ti nua ción, siem pre y cuan do sean apli ca blesal ca so en con si de ra ción.
a) Su mar mo men tos con res pec to al pun to de in ter sec ción de las lí neasde ac ción de dos fuer zas des co no ci das, se ob tie ne una ecua ción que in vo lu cra a unaso la in cóg ni ta.
b) Su mar com po nen tes en di rec ción per pen di cu lar a dos fuer zas pa ra -le las que son des co no ci das, se ob tie ne una ecua ción que in vo lu cra a una so la in -cóg ni ta.
3. Después de dibujar el diagrama de cuerpo libre, se puede determinar la existencia de una de las siguientes situaciones especiales.

a) Las reacciones involucran menos de tres incógnitas; se dice que el cuerpoestá parcialmente restringido y su movimiento es posible.
b) Las reacciones involucran más de tres incógnitas; se dice que las reac-ciones son estáticamente indeterminadas. Aunque se pueden calcular una o dos reacciones,no es posible determinarlas todas.
c) Las reacciones pasan a través de un solo punto o son paralelas; se diceque el cuerpo está impropiamente restringido y se puede presentar movimiento bajo unacondición general de carga.
171

172
Pro blemas
4.1 Un tractor de 2100 lb se utiliza para levantar 900 lb de grava. De-termine la reacción en las a) llantas traseras A, b) llantas delanteras B.
4.2 La jardinera que se muestra en la figura usa una carretilla de 60 Npara transportar una bolsa de 250 N de fertilizante. ¿Cuál es la fuerza quedebe ejercer en cada manubrio?
4.3 La jardinera del problema 4.2 desea transportar una segunda bolsade 250 N de fertilizante al mismo tiempo que la primera. Determine la má-xima distancia horizontal permisible desde el eje A de la llanta de la carreti-lla hasta el centro de gravedad de la segunda bolsa, si la jardinera sólo puedecargar 75 N con cada brazo.
4.4 Para la viga y las cargas mostradas en la figura, determine a) la reac-ción en A, b) la tensión en el cable BC.
20 in. 40 in. 50 in.
900 lb
A B
G
Figura P4.1
Figura P4.2
0.15 m 0.15 m
60 N
250 N
A
0.7 m
A
C
B
15 lb 20 lb 35 lb 15 lb20 lb
6 in. 8 in. 8 in. 6 in.
Figura P4.4
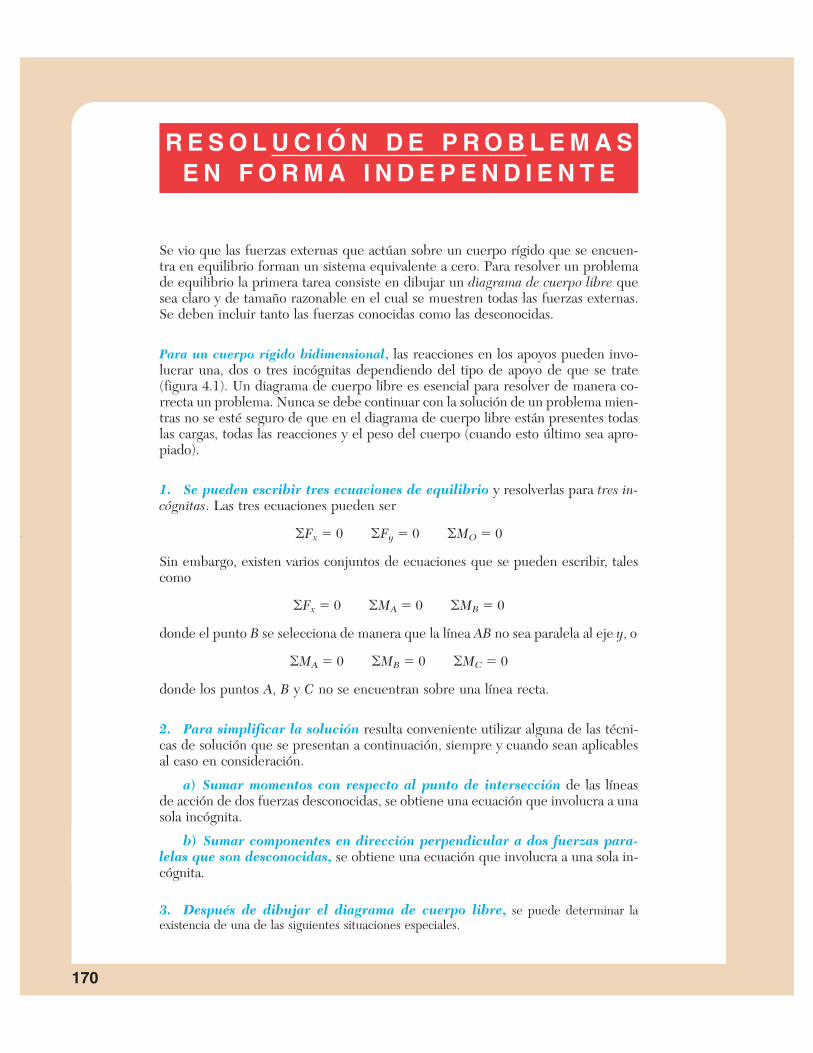
4.5 Dos cajas, cada una con una masa de 350 kg, se colocan en la partetrasera de una camioneta de 1 400 kg como se muestra en la figura. Deter-mine las reacciones en las a) llantas traseras A y b) llantas delanteras B.
173Problemas
4.6 Retome el problema 4.5, y ahora suponga que la caja D se retira yque la posición de la caja C permanece intacta.
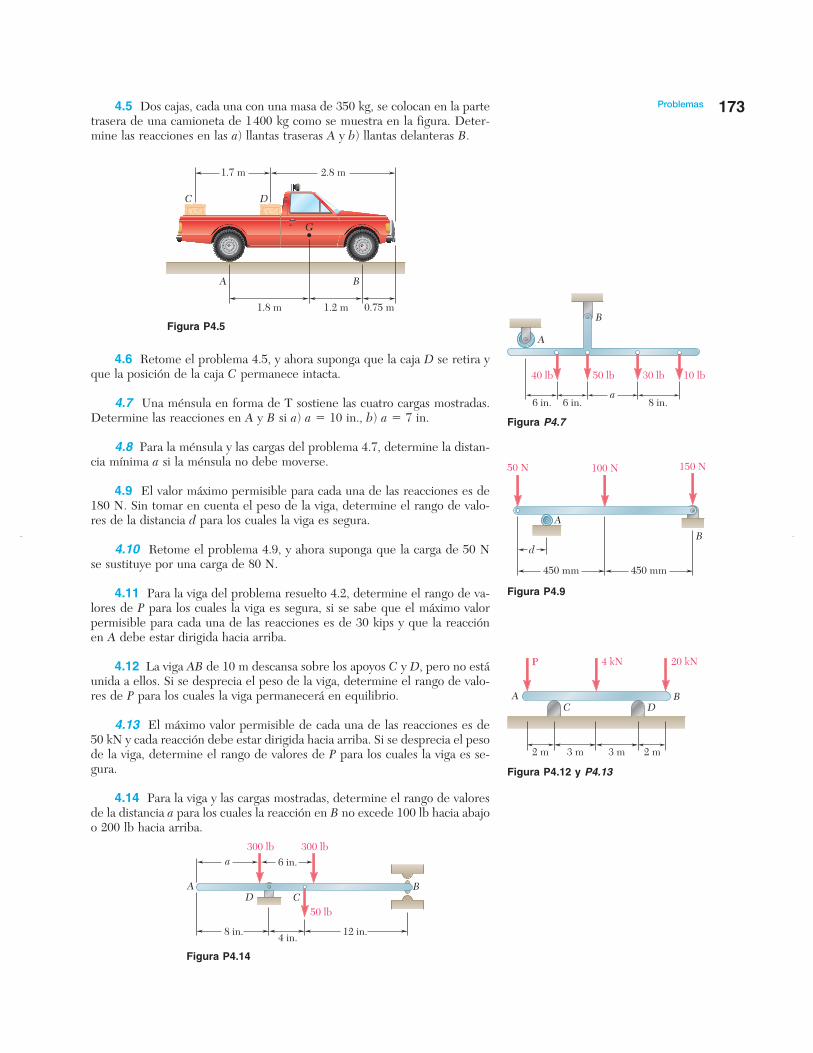
4.7 Una ménsula en forma de T sostiene las cuatro cargas mostradas.Determine las reacciones en A y B si a) a � 10 in., b) a � 7 in.
4.8 Para la ménsula y las cargas del problema 4.7, determine la distan-cia mínima a si la ménsula no debe moverse.
4.9 El valor máximo permisible para cada una de las reacciones es de180 N. Sin tomar en cuenta el peso de la viga, determine el rango de valo-res de la distancia d para los cuales la viga es segura.
4.10 Retome el problema 4.9, y ahora suponga que la carga de 50 Nse sustituye por una carga de 80 N.
4.11 Para la viga del problema resuelto 4.2, determine el rango de va-lores de P para los cuales la viga es segura, si se sabe que el máximo valorpermisible para cada una de las reacciones es de 30 kips y que la reacciónen A debe estar dirigida hacia arriba.
4.12 La viga AB de 10 m descansa sobre los apoyos C y D, pero no estáunida a ellos. Si se desprecia el peso de la viga, determine el rango de valo-res de P para los cuales la viga permanecerá en equilibrio.
4.13 El máximo valor permisible de cada una de las reacciones es de50 kN y cada reacción debe estar dirigida hacia arriba. Si se desprecia el pesode la viga, determine el rango de valores de P para los cuales la viga es se-gura.
4.14 Para la viga y las cargas mostradas, determine el rango de valoresde la distancia a para los cuales la reacción en B no excede 100 lb hacia abajoo 200 lb hacia arriba.
C D
G
1.7 m 2.8 m
A B
1.8 m 1.2 m 0.75 m
Figura P4.5
Figura P4.7
Figura P4.9
Figura P4.12 y P4.13
6 in. 6 in. 8 in.
10 lb30 lb50 lb40 lb
A
B
a
50 N 100 N 150 N
450 mm
d
A
B
450 mm
AC D
B
P 4 kN 20 kN
2 m 2 m3 m 3 m
a
AD C
B
6 in.300 lb 300 lb
50 lb
8 in. 4 in. 12 in.
Figura P4.14
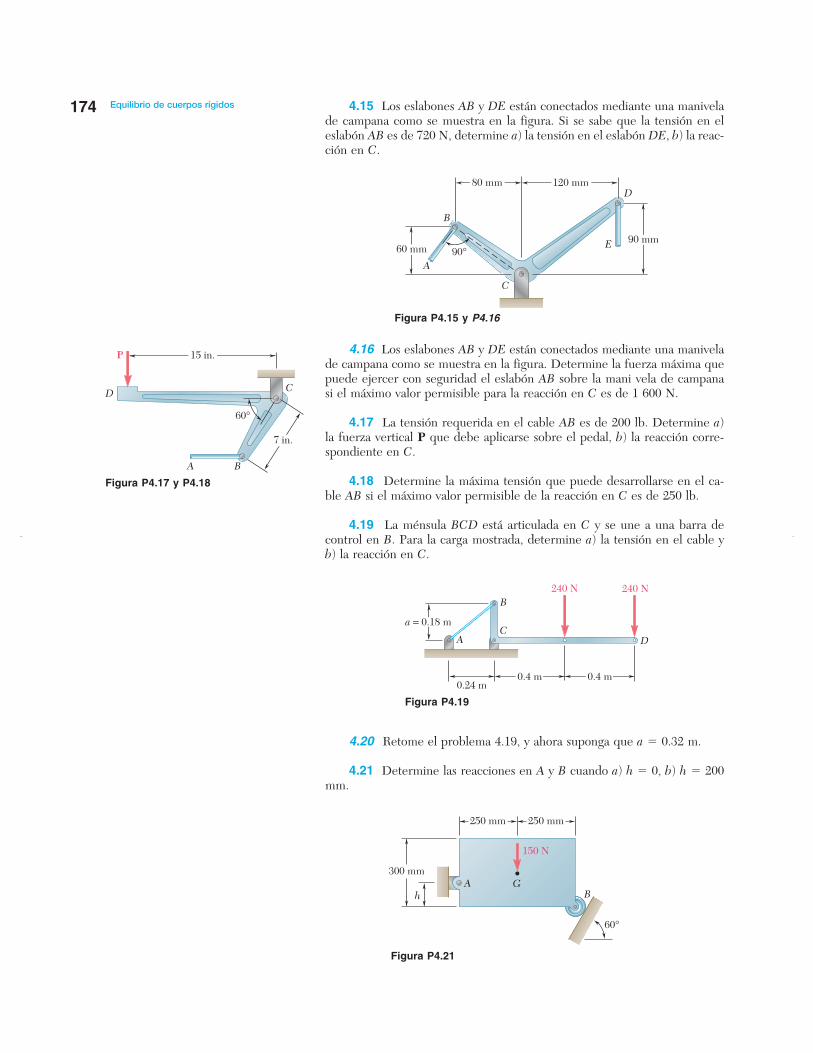
174 Equilibrio de cuerpos rígidos 4.15 Los eslabones AB y DE están conectados mediante una manivelade campana como se muestra en la figura. Si se sabe que la tensión en eleslabón AB es de 720 N, determine a) la tensión en el eslabón DE, b) la reac-ción en C.
4.16 Los eslabones AB y DE están conectados mediante una manivelade campana como se muestra en la figura. Determine la fuerza máxima quepuede ejercer con seguridad el eslabón AB sobre la mani vela de campanasi el máximo valor permisible para la reacción en C es de 1 600 N.
4.17 La tensión requerida en el cable AB es de 200 lb. Determine a)la fuerza vertical P que debe aplicarse sobre el pedal, b) la reacción corre-spondiente en C.
4.18 Determine la máxima tensión que puede desarrollarse en el ca-ble AB si el máximo valor permisible de la reacción en C es de 250 lb.
4.19 La ménsula BCD está articulada en C y se une a una barra decontrol en B. Para la carga mostrada, determine a) la tensión en el cable yb) la reacción en C.
4.20 Retome el problema 4.19, y ahora suponga que a � 0.32 m.
4.21 Determine las reacciones en A y B cuando a) h � 0, b) h � 200mm.
Figura P4.15 y P4.16
A
B
E
D
C
90°60 mm90 mm
80 mm 120 mm
Figura P4.17 y P4.18
Figura P4.19
P
D
A B
C
15 in.
7 in.
60°
240 N 240 N
0.24 m0.4 m 0.4 m
A
B
CD
a = 0.18 m
60°
300 mm
250 mm 250 mm
150 N
GB
Ah
Figura P4.21
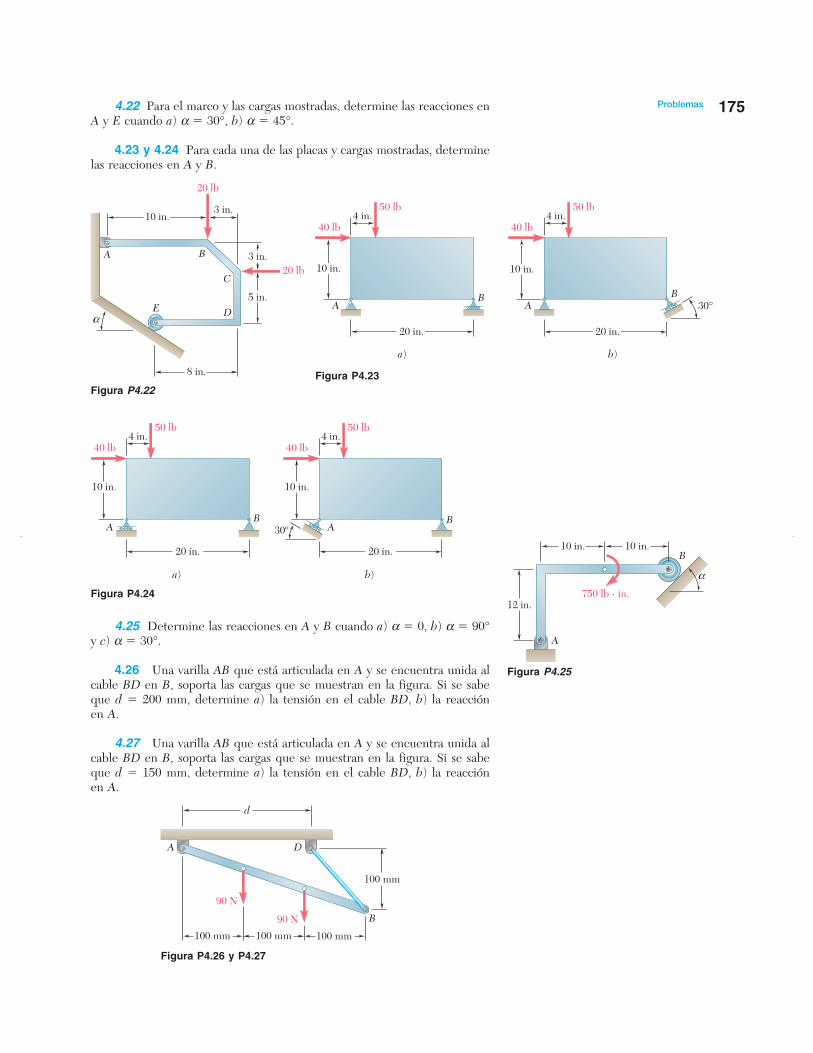
4.22 Para el marco y las cargas mostradas, determine las reacciones enA y E cuando a) α � 30°, b) α � 45°.
4.23 y 4.24 Para cada una de las placas y cargas mostradas, determinelas reacciones en A y B.
175Problemas
4.25 Determine las reacciones en A y B cuando a) α � 0, b) α � 90°y c) α � 30°.
4.26 Una varilla AB que está articulada en A y se encuentra unida alcable BD en B, soporta las cargas que se muestran en la figura. Si se sabeque d � 200 mm, determine a) la tensión en el cable BD, b) la reacción en A.
4.27 Una varilla AB que está articulada en A y se encuentra unida alcable BD en B, soporta las cargas que se muestran en la figura. Si se sabeque d � 150 mm, determine a) la tensión en el cable BD, b) la reacción en A.
Figura P4.22
10 in.3 in.
20 lb
20 lb
a
A B
DE
C
8 in.
5 in.
3 in.
Figura P4.23
Figura P4.24
40 lb 40 lb
50 lb 50 lb
AB
a)
30°
10 in.
AB
b)
20 in.
10 in.
4 in. 4 in.
20 in.
40 lb 40 lb
50 lb 50 lb
AB
a)
30º
20 in.
10 in.
AB
b)
20 in.
10 in.
4 in. 4 in.
Figura P4.25
Figura P4.26 y P4.27
10 in. 10 in.
12 in.
a
A
B
750 lb ⋅ in.
90 N
100 mm
100 mm100 mm100 mm
A
B
d
D
90 N

176 Equilibrio de cuerpos rígidos
4.29 Se aplica una fuerza P con magnitud de 280 lb al elemento ABCD,el cual se sostiene mediante un pasador sin fricción en A y por medio del ca-ble CED. Como el cable pasa sobre una pequeña polea en E, se puede supo-ner que la tensión es la misma en los tramos CE y ED del cable. Para el casoen que a � 3 in., determine a) la tensión en el cable, b) la reacción en A.
4.30 Sin tomar en cuenta la fricción, determine la tensión en el cableABD y la reacción en el apoyo C.
4.31 La barra ABC está doblada en forma de un arco circular de radioR. Si se sabe que θ � 30°, determine la reacción a) en B y b) en C.
4.32 La barra ABC está doblada en forma de un arco circular de radioR. Si se sabe que θ � 60°, determine la reacción a) en B y b) en C.
4.33 Sin tomar en cuenta la fricción, determine la tensión en el cableABD y la reacción en C cuando θ � 60°.
4.34 Sin tomar en cuenta la fricción, determine la tensión en el cableABD y la reacción en C cuando θ � 45°.
4.28 Una palanca AB está articulada en C y se encuentra unida a uncable de control en A. Si la palanca se somete a una fuerza horizontal en Bde 500 N, determine a) la tensión en el cable y b) la reacción en C.
Figura P4.28
B
D
30°
500 N
C
200 mm
250 mm
250 mm
A
Figura P4.29
Figura P4.30
A
B C
DE
P
a 12 in.
5 in.
12 in.
12 in.
A E
C
120 N
100 mm 100 mm
B D
250 mm
Figura P4.31 y P4.32
Figura P4.33 y P4.34
A
BC
R
P
qA
B
D
C
90°
P
q
a a
2a

Problemas 1774.35 Una varilla ligera AD se sostiene mediante clavijas sin fricción enB y C y descansa contra una pared sin fricción en A. Se aplica una fuerzavertical de 120 lb en D. Determine las reacciones en A, B y C.
4.36 Una barra ligera AD se encuentra suspendida de un cable BE ysostiene un bloque de 50 lb en C. Los extremos A y D de la barra están encontacto con paredes verticales sin fricción. Determine la tensión en el ca-ble BE y las reacciones en A y D.
4.37 La barra AC soporta dos cargas de 400 N como se muestra en lafigura. Los rodillos en A y C descansan sobre superficies sin fricción y el ca-ble BD está unido en B. Determine a) la tensión en el cable BD, b) la reac-ción en A y c) la reacción en C.
4.38 Determine la tensión en cada cable y la reacción en D.
Figura P4.35
Figura P4.36
Figura P4.37
Figura P4.38
120 lb
30°A
BC
D
8 in.
8 in.
8 in.
A50 lb
B
C
D
E
5 in.
8 in.
7 in.3 in.
400 N
400 N
100 mm
150 mm
100 mm300 mm
500 mm
A
B
C
D
250 mm
600 N
100 mm100 mm100 mm
80 mm
80 mmA B C D
E
F

178 Equilibrio de cuerpos rígidos 4.39 Se cortan dos ranuras en la placa DEF mostrada en la figura, y laplaca se coloca de manera que las ranuras se ajusten a dos pasadores fijos sinfricción en A y B. Si se sabe que P � 15 lb, determine a) la fuerza que ejercecada pasador sobre la placa, b) la reacción en F.
4.40 Para la placa del problema 4.39, la reacción en F debe estar diri-gida hacia abajo, y su valor permisible máximo es de 20 lb. Si se despreciala fricción en los pasadores, determine el rango requerido para los valores de P.
4.41 La barra AD se une en A y C a los collarines que pueden moverselibremente sobre las varillas mostradas. Si la cuerda BE está en posición ver-tical (α � 0), determine la tensión en la cuerda y las reacciones en A y en C.
4.42 Ahora resuelva el problema 4.41 si la cuerda BE se encuentra pa-ralela a las varillas (α � 30°).
4.43 Una masa de 8 kg puede sostenerse de las tres formas diferentesque se muestran en la figura. Si se sabe que las poleas tienen un radio de100 mm, determine en cada caso las reacciones en A.
Figura P4.39
P A
B
D E
F
4 in. 4 in. 7 in. 2 in.
30º
30 lb
3 in.
Figura P4.41
A B
E
CD
30°
80 Na
0.2 m 0.2 m
30°
0.2 m
B
A A A
B B
8 kg 8 kg 8 kg
a) b) c)
1.6 m 1.6 m 1.6 m
Figura P4.43

Problemas 1794.44 Mientras una cinta pasa a través del sistema de apoyo mostradoen la figura, sobre ésta se mantiene una tensión de 5 lb. Si se sabe que el ra-dio de cada polea es de 0.4 in., determine la reacción en C.
4.45 Retome el problema 4.44, y ahora suponga que se usan poleas con0.6 in. de radio.
4.46 Un poste telefónico de 6 m que pesa 1 600 N se usa para soste-ner los extremos de dos alambres. Los alambres forman con la horizontal losángulos que se muestran en la figura y las tensiones en los alambres son, respectivamente, T1 � 600 N y T2 � 375 N. Determine la reacción en el ex-tremo fijo A.
4.47 La viga AD soporta las dos cargas de 40 lb que se muestran en lafigura. La viga se sostiene mediante un soporte fijo en D y por medio del ca-ble BE que está unido al contrapeso W. Determine la reacción en D cuandoa) W � 100 lb, b) W � 90 lb.
4.48 Para la viga y las cargas mostradas, determine el rango de valoresde W para los que la magnitud del par en D no excede 40 lb � ft.
Figura P4.44
C
5 lb
5 lb
3 in. 3 in.
1.8 in.
A B
A
B
6 m
20°T1
T2
10°
Figura P4.46
A B C D
40 lb 40 lb
E5 ft
4 ft4 ft
W
Figura P4.47 y P4.48
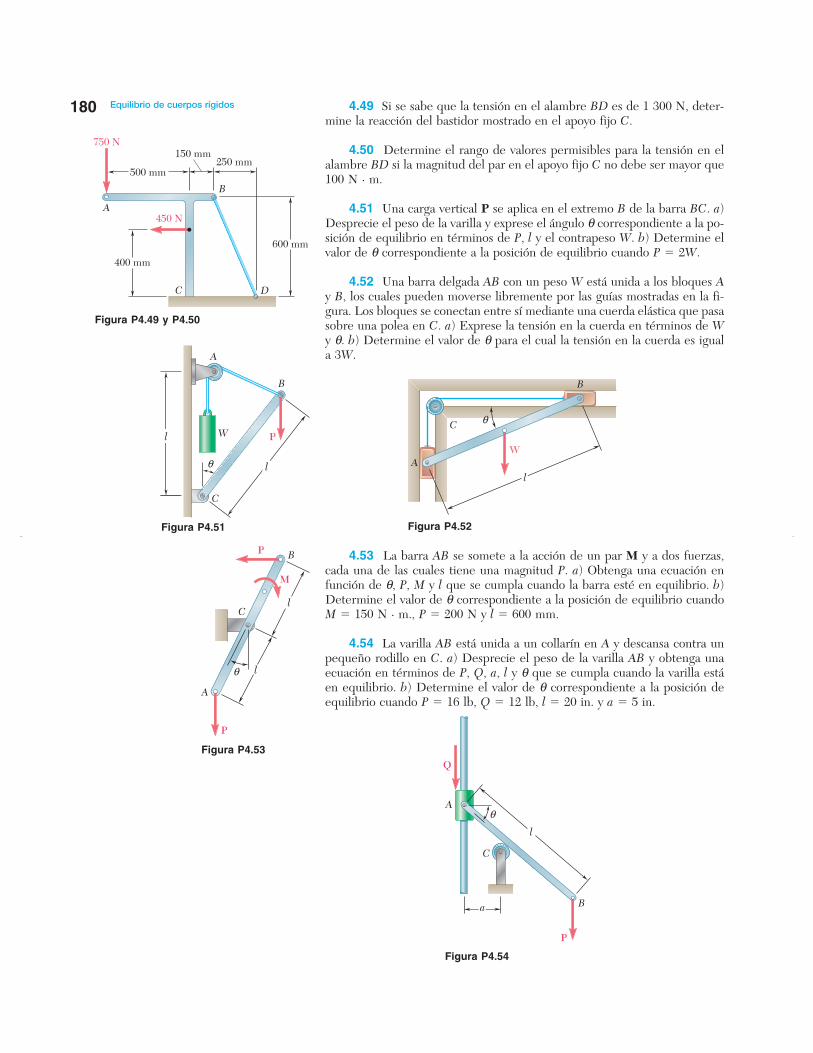
180 Equilibrio de cuerpos rígidos 4.49 Si se sabe que la tensión en el alambre BD es de 1 300 N, deter-mine la reacción del bastidor mostrado en el apoyo fijo C.
4.50 Determine el rango de valores permisibles para la tensión en elalambre BD si la magnitud del par en el apoyo fijo C no debe ser mayor que100 N · m.
4.51 Una carga vertical P se aplica en el extremo B de la barra BC. a)Desprecie el peso de la varilla y exprese el ángulo θ correspondiente a la po-sición de equilibrio en términos de P, l y el contrapeso W. b) Determine elvalor de θ correspondiente a la posición de equilibrio cuando P � 2W.
4.52 Una barra delgada AB con un peso W está unida a los bloques Ay B, los cuales pueden moverse libremente por las guías mostradas en la fi-gura. Los bloques se conectan entre sí mediante una cuerda elástica que pasasobre una polea en C. a) Exprese la tensión en la cuerda en términos de Wy θ. b) Determine el valor de θ para el cual la tensión en la cuerda es iguala 3W.
4.53 La barra AB se somete a la acción de un par M y a dos fuerzas,cada una de las cuales tiene una magnitud P. a) Obtenga una ecuación enfunción de θ, P, M y l que se cumpla cuando la barra esté en equilibrio. b)Determine el valor de θ correspondiente a la posición de equilibrio cuandoM � 150 N · m., P � 200 N y l � 600 mm.
4.54 La varilla AB está unida a un collarín en A y descansa contra unpequeño rodillo en C. a) Desprecie el peso de la varilla AB y obtenga unaecuación en términos de P, Q, a, l y θ que se cumpla cuando la varilla estáen equilibrio. b) Determine el valor de θ correspondiente a la posición deequilibrio cuando P � 16 lb, Q � 12 lb, l � 20 in. y a � 5 in.
Figura P4.49 y P4.50
750 N
500 mm
150 mm250 mm
600 mm
450 NA
B
C D
400 mm
P
B
C
l
l
q
W
A
Figura P4.52
A
B
C
W
q
l
A
B
C
l
l
P
P
q
M
A
B
C
Q
P
q
l
a
Figura P4.54
Figura P4.53
Figura P4.51

Problemas 1814.55 Un collarín B de peso W puede moverse libremente a lo largo dela barra vertical mostrada en la figura. El resorte de constante k se encuen-tra sin deformar cuando q � 0. a) Encuentre una ecuación en términos deθ, W, k y l que se cumpla cuando el collarín está en equilibrio. b) Si se sabeque W � 300 N, l � 500 mm y k � 800 N/m, determine el valor de θ co-rrespondiente a la posición de equilibrio.
4.56 Una carga vertical P se aplica en el extremo B de la barra BC. Laconstante del resorte es k y se encuentra sin deformar cuando θ � 90°. Sintomar en cuenta el peso de la barra, determine a) el ángulo θ correspon-diente a la posición de equilibrio, expresado en términos de P, k y l y b) elvalor de θ correspondiente a la posición de equilibrio cuando P � �
14
�kl.
4.57 Retome el problema resuelto 4.5, y ahora suponga que el resortese encuentra sin deformación cuando θ � 90°.
4.58 Una barra delgada AB de peso W se une a los bloques A y B quese mueven libremente sobre las guías mostradas en la figura. El resorte, quetiene una constante k, se encuentra sin deformar cuando θ � 0. a) Sin to-mar en cuenta el peso de los bloques, encuentre una ecuación en términosde W, k, l y θ que se cumpla cuando la barra está en equilibrio. b) Deter-mine el valor de θ cuando W � 75 lb, l � 30 in. y k � 3 lb/in.
4.59 Ocho placas rectangulares idénticas de 500 � 750 mm, cada unacon una masa m � 40 kg, se mantienen en el plano vertical mostrado en lafigura. Todas las conexiones consisten en pernos sin fricción, rodillos o esla-bones cortos. En cada caso, determine a) si la placa está completa, parcial oimpropiamente restringida, b) si las reacciones son estáticamente determi-nadas o indeterminadas y c) si, en la posición mostrada, se mantiene el equi-librio de la placa. También, de ser posible, calcule las reacciones.
Figura P4.55
Figura P4.56
A
B
C
P
q
l
l
A
B
q
l
Figura P4.58
Figura P4.59
A B
CD
1 2 3 4
5 6 7 8
A
BW
q
l
190 Equilibrio de cuerpos rígidos
†En al gu nos pro ble mas, es con ve nien te eli mi nar de la so lu ción las reac cio nes en dos pun tosA y B es cri bien do la ecua ción de equi li brio �MAB � 0, la cual im pli ca de ter mi nar los mo men -tos de las fuer zas res pec to al eje AB que une los pun tos A y B (vea el pro ble ma re suel to 4.10).
EQUILIBRIO EN TRES DI MEN SIO NES
4.8. EQUILIBRIO DE UN CUER PO RÍ GI DO EN TRES DI MEN SIO NES
En la sec ción 4.1 se ex pli có que, pa ra el ca so ge ne ral de tres di men sio -nes, se re quie ren seis ecua cio nes es ca la res pa ra ex pre sar las con di cio -nes de equi li brio de un cuer po rí gi do:
�Fx � 0 �Fy � 0 �Fz � 0 (4.2)�Mx � 0 �My � 0 �Mz � 0 (4.3)
Es tas ecua cio nes pue den re sol ver se pa ra un má xi mo de seis in cóg ni tasque, ge ne ral men te, re pre sen ta rán reac cio nes en los apo yos o las co ne -xio nes.
En la ma yor par te de los pro ble mas, las ecua cio nes es ca la res (4.2)y (4.3) se ob ten drán de mo do más prác ti co si pri me ro se ex pre san enfor ma vec to rial las con di cio nes pa ra el equi li brio del cuer po rí gi do con -si de ra do. Pa ra ello se es cri be
�F � 0 �MO � �(r � F) � 0 (4.1)
y se ex pre san las fuer zas F y los vec to res de po si ción r en tér mi nos decom po nen tes es ca la res y vec to res uni ta rios. Des pués, se cal cu lan to doslos pro duc tos vec to ria les, ya sea me dian te cál cu lo di rec to o con de ter -mi nan tes (vea la sec ción 3.8). Se ob ser va que a tra vés de una se lec cióncui da do sa del pun to O se pue den eli mi nar de los cál cu los has ta tres com -po nen tes des co no ci das de las reac cio nes. Al igua lar a ce ro los coe fi cien -tes de los vec to res uni ta rios en ca da una de las dos re la cio nes (4.1), seob tie nen las ecua cio nes es ca la res de sea da s.†
4.9. REAC CIO NES EN PUNTOS DE APO YO Y CO NE XIO NESPARA UNA ES TRUC TU RA TRI DI MEN SIO NAL
En una es truc tu ra tri di men sio nal, las reac cio nes abar can des de una so -la fuer za de di rec ción co no ci da, que ejer ce una su per fi cie sin fric ción,has ta un sis te ma fuer za-par ejer ci do por un apo yo fi jo. Por tan to, en losproblemas que involucran el equilibrio de una estructura tridimensionalpueden existir entre una y seis incógnitas asociadas con la reacción co-rrespondiente a cada apoyo o conexión. En la fıgura 4.10 se muestranvarios tipos de apoyos y conexiones con sus respectivas reacciones. Unaforma sencilla de determinar tanto el tipo de reacción correspondientea un apoyo o conexión dado, como el número de incógnitas involucradas,consiste en establecer cuáles de los seis movimientos fundamentales
4.90 Para la varilla del problema 4.89, L � 15 in., R � 20 in. y W �10 lb. Determine a) el ángulo θ correspondiente a la posición de equilibrioy b) las reacciones en A y B.

1914.9. Reacciones en puntos de apoyo y conexiones para una estructura
tridimensional
(traslación en las direcciones x, y y z y rotación con respecto a los ejesx, y y z) están permitidos y cuáles de estos movimientos están restrin-gidos.
Por ejemplo, los apoyos de bola y cuenca o de rótula, las superfi-cies sin fricción (lisas) y los cables sólo impiden la traslación en una di-rección y, por tanto, ejercen una sola fuerza cuya línea de acción esconocida; así, cada uno de estos apoyos involucra una incógnita, la cualestá dada por la magnitud de la reacción. Los rodillos sobre superfi-cies rugosas y las ruedas sobre rieles impiden la traslación en dos di-recciones; por consiguiente, las reacciones correspondientes consistenen dos componentes de fuerza desconocidas. Las superficies rugosas encontacto directo y las rótulas (bola y cuenca) impiden la traslación en tres direcciones; por tanto estos apoyos involucran tres componentesde fuerza desconocidas.
Al gu nos apo yos y co ne xio nes pue den im pe dir la ro ta ción y la tras -la ción; en es tos ca sos, las reac cio nes co rres pon dien tes in clu yen tan topa res co mo fuer zas. Por ejem plo, la reac ción en un apo yo fi jo, la cualim pi de cual quier mo vi mien to (tan to de ro ta ción co mo de tras la ción),con sis te en tres fuer zas y tres pa res, to dos des co no ci dos. Una jun ta uni -ver sal di se ña da pa ra per mi tir la ro ta ción al re de dor de dos ejes ejer ce -rá una reac ción que con sis te en tres com po nen tes de fuer za y un par,to dos des co no ci dos.
Otros apo yos y co ne xio nes se usan pri mor dial men te pa ra im pe dirtras la cio nes; sin em bar go, su di se ño es tal que tam bién im pi den al gu -nas ro ta cio nes. Las reac cio nes co rres pon dien tes con sis ten en com po -nen tes de fuer za pe ro tam bién pue den in cluir pa res. Un gru po de apo -yos de es te ti po in clu ye las bi sa gras y los co ji ne tes di se ña dos pa raso por tar só lo car gas ra dia les (por ejem plo, las chu ma ce ras y los co ji ne -tes de ro di llos). Las reac cio nes co rres pon dien tes con sis ten en dos com -po nen tes de fuer za pe ro pue den in cluir tam bién dos pa res. Otro gru -po in clu ye apo yos de pa sa dor y mén su la, bi sa gras y co ji ne tes di se ña dospa ra so por tar tan to un em pu je axial co mo una car ga ra dial (por ejem -plo, los co ji ne tes de bo la). Las reac cio nes co rres pon dien tes con sis tenen tres com po nen tes de fuer za pe ro pue den in cluir dos pa res. Sin em -bar go, es tos apo yos no ejer ce rán pa res apre cia bles ba jo con di cio nesnor ma les de uso. Por tan to, en su aná li sis só lo se de ben in cluir las com -po nen tes de fuer za a me nos que se en cuen tre que los pa res son ne ce -sa rios pa ra man te ner el equi li brio del cuer po rí gi do o si se sa be que elapo yo ha si do di se ña do es pe cí fi ca men te pa ra ejer cer un par (véan sepro ble mas del 4.119 al 4.122).
Si las reac cio nes in vo lu cran más de seis in cóg ni tas, hay más in cóg -ni tas que ecua cio nes y al gu nas de las reac cio nes son es tá ti ca men te in -de ter mi na das. Si las reac cio nes in vo lu cran me nos de seis in cóg ni tas,exis ten más ecua cio nes que in cóg ni tas y pue den no cum plir se al gu nasde las ecua cio nes de equi li brio ba jo una con di ción ge ne ral de car ga,en ta les cir cuns tan cias, el cuer po rí gi do só lo es tá par cial men te res trin -gi do. Sin em bar go, ba jo con di cio nes es pe cí fi cas de car ga co rres pon -dien tes a un pro ble ma da do, las ecua cio nes adi cio na les se re du cen aiden ti da des tri via les, co mo 0 � 0 y pue den des car tar se; así, aun que elcuer po rí gi do só lo es tá par cial men te res trin gi do, és te per ma ne ce enequi li brio (véan se los pro ble mas re suel tos 4.7 y 4.8). A pe sar de quese ten gan seis o más in cóg ni tas, es po si ble que no se cum plan al gu nasde las ecua cio nes de equilibrio. Esto puede ocurrir cuando las reac-ciones asociadas con los apoyos son paralelas o intersecan a la mismalínea; entonces, el cuerpo rígido tiene restricción impropia.
Fotografía 4.6 Las juntas universales que seencuentran comúnmente en las flechas motricesde los autos y camiones de tracción trasera,permiten la transmisión del movimiento rotacionalentre dos ejes no colineales.
Fotografía 4.7 La caja de cojinetes que semuestra en la fotografía sostiene al eje de unventilador usado en una instalación industrial.

192
Bola Superficie sin fricción
Fuerzas con línea deacción conocida(una incógnita)
Fuerza con líneade acción conocida
(una incógnita)Cable
FF
Rodillo sobresuperficie rugosa
Superficie rugosa
Junta o uniónuniversal
Bisagra y cojinete que soportan sólo carga radial
Rueda sobre rielDos componentes de fuerza
Tres componentes de fuerza
Tres componentesde fuerza y un par
Tres componentesde fuerza y tres pares
Tres componentes defuerza (y dos pares)
Dos componentesde fuerza (y dos pares)
Fy
Fx
Fx
Mx
Fz
Fy
FzFx
Fy
Fz
Fy
Fz
Fy
Fz
My
(Mz)
(My)
(Mz)
(My)
Mz
Rótula (bola y cuenca)
Apoyo fijo
Bisagra y cojinete que soportanempuje axial y carga radialPasador y ménsula
Fx
Mx
Fy
Fz
Figura 4.10 Reacciones en apoyos y conexiones.
PROBLEMA RESUELTO 4.7
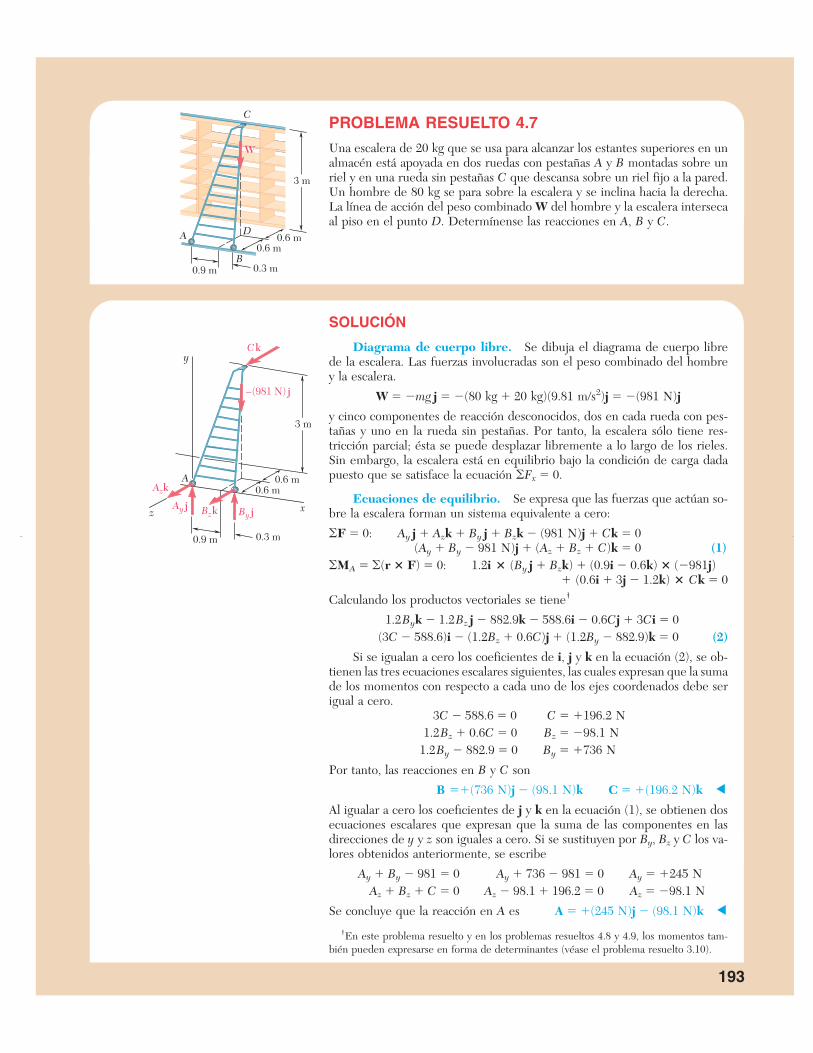
Una escalera de 20 kg que se usa para alcanzar los estantes superiores en unalmacén está apoyada en dos ruedas con pestañas A y B montadas sobre unriel y en una rueda sin pestañas C que descansa sobre un riel fijo a la pared.Un hombre de 80 kg se para sobre la escalera y se inclina hacia la derecha.La línea de acción del peso combinado W del hombre y la escalera intersecaal piso en el punto D. Determínense las reacciones en A, B y C.
SOLUCIÓN
Diagrama de cuerpo libre. Se dibuja el diagrama de cuerpo librede la escalera. Las fuerzas involucradas son el peso combinado del hombrey la escalera.
W � �mg j � �(80 kg � 20 kg)(9.81 m/s2)j � �(981 N)j
y cinco componentes de reacción desconocidos, dos en cada rueda con pes-tañas y uno en la rueda sin pestañas. Por tanto, la escalera sólo tiene res-tricción parcial; ésta se puede desplazar libremente a lo largo de los rieles.Sin embargo, la escalera está en equilibrio bajo la condición de carga dadapuesto que se satisface la ecuación �Fx � 0.
Ecuaciones de equilibrio. Se expresa que las fuerzas que actúan so-bre la escalera forman un sistema equivalente a cero:
�F � 0: Ay j � Azk � By j � Bzk � (981 N)j � Ck � 0(Ay � By � 981 N)j � (Az � Bz � C)k � 0 (1)
�MA � �(r � F) � 0: 1.2i � (By j � Bzk) � (0.9i � 0.6k) � (�981j)� (0.6i � 3j � 1.2k) � Ck � 0
Calculando los productos vectoriales se tiene†
1.2Byk � 1.2Bz j � 882.9k � 588.6i � 0.6Cj � 3Ci � 0(3C � 588.6)i � (1.2Bz � 0.6C)j � (1.2By � 882.9)k � 0 (2)
Si se igualan a cero los coeficientes de i, j y k en la ecuación (2), se ob-tienen las tres ecuaciones escalares siguientes, las cuales expresan que la sumade los momentos con respecto a cada uno de los ejes coordenados debe serigual a cero.
3C � 588.6 � 0 C � �196.2 N1.2Bz � 0.6C � 0 Bz � �98.1 N
1.2By � 882.9 � 0 By � �736 N
Por tanto, las reacciones en B y C son
B ��(736 N)j � (98.1 N)k C � �(196.2 N)k
Al igualar a cero los coefıcientes de j y k en la ecuación (1), se obtienen dosecuaciones escalares que expresan que la suma de las componentes en lasdirecciones de y y z son iguales a cero. Si se sustituyen por By, Bz y C los va-lores obtenidos anteriormente, se escribe
Ay � By � 981 � 0 Ay � 736 � 981 � 0 Ay � �245 NAz � Bz � C � 0 Az � 98.1 � 196.2 � 0 Az � �98.1 N
Se concluye que la reacción en A es A � �(245 N)j � (98.1 N)k
†En este problema resuelto y en los problemas resueltos 4.8 y 4.9, los momentos tam-bién pueden expresarse en forma de determinantes (véase el problema resuelto 3.10).
A
B
C
D0.6 m
0.6 m
0.9 m 0.3 m
W
3 m
A 0.6 m0.6 m
0.9 m 0.3 m
x
y
z
Ck
–(981 N) j
Ay j
Azk
Bzk By j
3 m
193
PROBLEMA RESUELTO 4.8
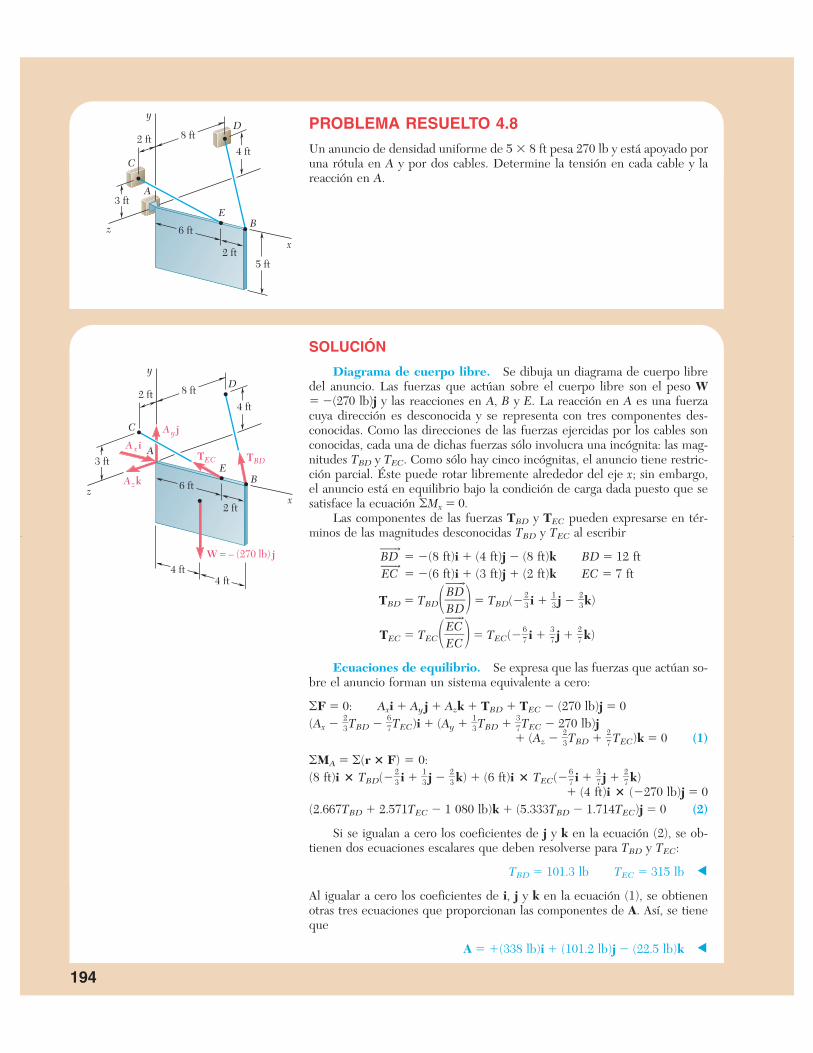
Un anuncio de densidad uniforme de 5 � 8 ft pesa 270 lb y está apoyado poruna rótula en A y por dos cables. Determine la tensión en cada cable y lareacción en A.
SOLUCIÓN
Diagrama de cuerpo libre. Se dibuja un diagrama de cuerpo libredel anuncio. Las fuerzas que actúan sobre el cuerpo libre son el peso W� �(270 lb)j y las reacciones en A, B y E. La reacción en A es una fuerzacuya dirección es desconocida y se representa con tres componentes des-conocidas. Como las direcciones de las fuerzas ejercidas por los cables sonconocidas, cada una de dichas fuerzas sólo involucra una incógnita: las mag-nitudes TBD y TEC. Como sólo hay cinco incógnitas, el anuncio tiene restric-ción parcial. Éste puede rotar libremente alrededor del eje x; sin embargo,el anuncio está en equilibrio bajo la condición de carga dada puesto que sesatisface la ecuación �Mx � 0.
Las componentes de las fuerzas TBD y TEC pueden expresarse en tér-minos de las magnitudes desconocidas TBD y TEC al escribir
BD�� � �(8 ft)i � (4 ft)j � (8 ft)k BD � 12 ftEC�� � �(6 ft)i � (3 ft)j � (2 ft)k EC � 7 ft
TBD � TBD��BB
D�
D
��� � TBD(��
23
�i � �13
�j � �23
�k)
TEC � TEC��EE
C�
C
��� � TEC(��
67
�i � �37
�j � �27
�k)
Ecuaciones de equilibrio. Se expresa que las fuerzas que actúan so-bre el anuncio forman un sistema equivalente a cero:
�F � 0: Axi � Ay j � Azk � TBD � TEC � (270 lb)j � 0(Ax � �
23
�TBD � �67
�TEC)i � (Ay � �13
�TBD � �37
�TEC � 270 lb)j� (Az � �
23
�TBD � �27
�TEC)k � 0 (1)
�MA � �(r � F) � 0:(8 ft)i � TBD(��
23
�i � �13
�j � �23
�k) � (6 ft)i � TEC(��67
�i � �37
�j � �27
�k) � (4 ft)i � (�270 lb)j � 0
(2.667TBD � 2.571TEC � 1 080 lb)k � (5.333TBD � 1.714TEC)j � 0 (2)
Si se igualan a cero los coeficientes de j y k en la ecuación (2), se ob-tienen dos ecuaciones escalares que deben resolverse para TBD y TEC:
TBD � 101.3 lb TEC � 315 lb
Al igualar a cero los coeficientes de i, j y k en la ecuación (1), se obtienenotras tres ecuaciones que proporcionan las componentes de A. Así, se tieneque
A � �(338 lb)i � (101.2 lb)j � (22.5 lb)k
A
B
C
D
E
x
y
z 6 ft
2 ft
2 ft
5 ft
4 ft
8 ft
3 ft
W = – (270 lb) j
A x i
Azk
A y j
TEC TBDA
B
C
D
E
x
y
z 6 ft
2 ft
2 ft4 ft
4 ft4 ft
8 ft
3 ft
194
PRO BLE MA RE SUEL TO 4.9
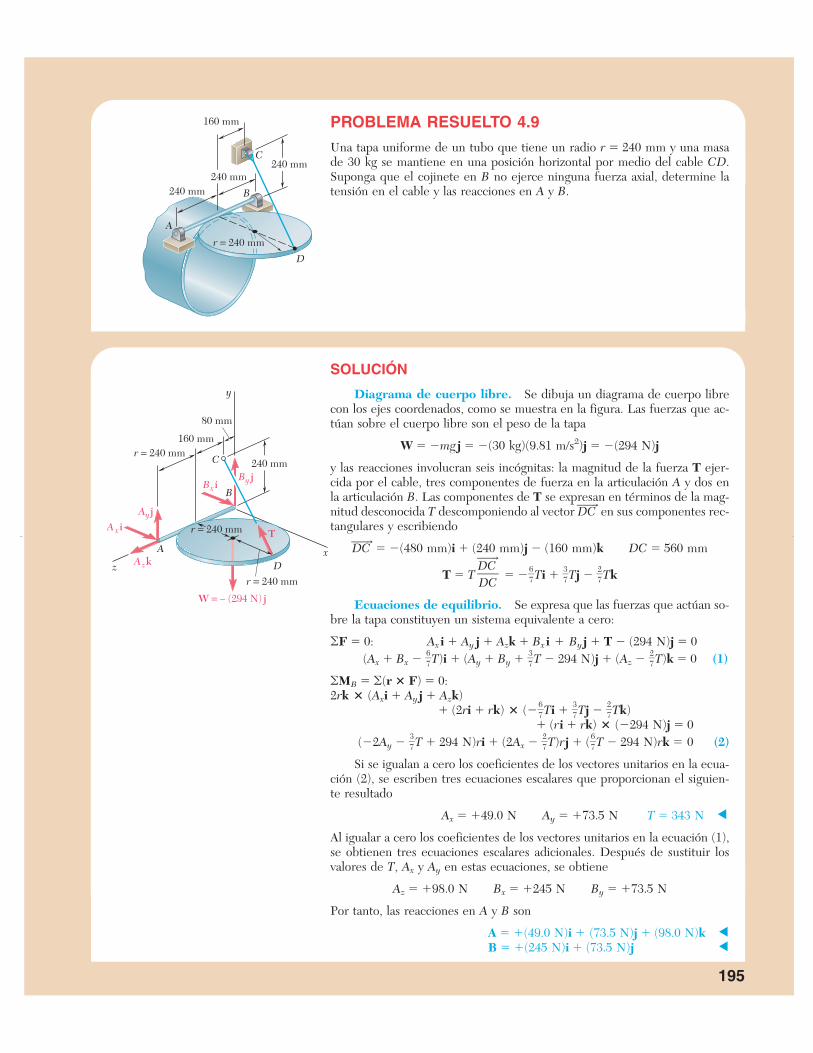
Una ta pa uni for me de un tu bo que tie ne un ra dio r � 240 mm y una ma sade 30 kg se man tie ne en una po si ción ho ri zon tal por me dio del ca ble CD.Su pon ga que el co ji ne te en B no ejer ce nin gu na fuer za axial, de ter mi ne laten sión en el ca ble y las reac cio nes en A y B.
SO LU CIÓN
Dia gra ma de cuer po li bre . Se di bu ja un dia gra ma de cuer po li brecon los ejes coor de na dos, co mo se mues tra en la fi gu ra. Las fuer zas que ac -túan so bre el cuer po li bre son el pe so de la ta pa
W � �mg j � �(30 kg)(9.81 m/s2)j � �(294 N)j
y las reac cio nes in vo lu cran seis in cóg ni tas: la mag ni tud de la fuer za T ejer -ci da por el ca ble, tres com po nen tes de fuer za en la ar ti cu la ción A y dos enla ar ti cu la ción B. Las com po nen tes de T se ex pre san en tér mi nos de la mag -ni tud des co no ci da T des com po nien do al vec tor DC�� en sus com po nen tes rec -tan gu la res y es cri bien do
DC�� � �(480 mm)i � (240 mm)j � (160 mm)k DC � 560 mm
T � T � ��67
�Ti � �37
�Tj � �27
�Tk
Ecua cio nes de equi li brio . Se ex pre sa que las fuer zas que ac túan so -bre la ta pa cons ti tu yen un sis te ma equi va len te a ce ro:
�F � 0: Ax i � Ay j � Azk � Bx i � By j � T � (294 N)j � 0(Ax � Bx � �
67
�T)i � (Ay � By � �37
�T � 294 N)j � (Az � �27
�T)k � 0 (1)
�MB � �(r � F) � 0:2rk � (Axi � Ay j � Azk)
� (2ri � rk) � (��67
�Ti � �37
�Tj � �27
�Tk)� (ri � rk) � (�294 N)j � 0
(�2Ay � �37
�T � 294 N)ri � (2Ax � �27
�T)rj � (�67
�T � 294 N)rk � 0 (2)
Si se igua lan a ce ro los coe fi cien tes de los vec to res uni ta rios en la ecua -ción (2), se es cri ben tres ecua cio nes es ca la res que pro por cio nan el si guien -te re sul ta do
Ax � �49.0 N Ay � �73.5 N T � 343 N
Al igualar a cero los coeficientes de los vectores unitarios en la ecuación (1),se obtienen tres ecuaciones escalares adicionales. Después de sustituir losvalores de T, Ax y Ay en estas ecuaciones, se obtiene
Az � �98.0 N Bx � �245 N By � �73.5 N
Por tanto, las reacciones en A y B son
A � �(49.0 N)i � (73.5 N)j � (98.0 N)kB � �(245 N)i � (73.5 N)j
DC���DC
r = 240 mm
A
B
C
D
160 mm
240 mm240 mm
240 mm
r = 240 mm
A
B
C
D
W = – (294 N) j
Bx iBy j
A x iAyj
Azk
160 mm
80 mm
Tr = 240 mm
r = 240 mm
x
y
z
240 mm
195

PROBLEMA RESUELTO 4.10
Una carga de 450 lb está colgada en la esquina C de un tramorígido de tubería ABCD que ha sido doblado, como se mues-tra en la figura. El tubo está apoyado por medio de rótulasen A y D, las cuales están unidas, respectivamente, al piso ya la pared vertical y por un cable que está unido al puntomedio E de la porción BC del tubo y al punto G en la pared.Determine: a) dónde debe estar ubicado el punto G si la ten-sión en el cable debe ser mínima y b) el valor mínimo co-rrespondiente de la tensión.
SOLUCIÓN
Diagrama de cuerpo libre. El diagrama de cuerpo libre del tuboincluye la carga W � (�450 lb)j, las reacciones en A y en D y la fuerza T ejerci-da por el cable. Para eliminar de los cálculos a las reacciones en A y en D, seexpresa que la suma de los momentos de las fuerzas con respecto a AD es iguala cero. Si se representa con el vector unitario a lo largo de AD, se escribe
�MAD � 0: � (AE�� � T) � � (AC�� � W) � 0 (1)
El segundo término en la ecuación (1) se puede calcular como sigue:
AC�� � W � (12i � 12j) � (�450j) � �5 400k
� �AA
DD��� ��
12i � 1128j � 6k�� �
23
�i � �23
�j � �13
�k
� (AC�� � W) � (�23
�i � �23
�j � �13
�k) � (�5 400k) � �1 800
Sustituyendo el valor obtenido en la ecuación (1), se escribe
� (AE�� � T) � �1 800 lb � ft (2)
Valor mínimo de la tensión. Recordando la propiedad conmutativapara los productos triples escalares, se vuelve a escribir la ecuación (2) de lasiguiente forma
T � ( � AE��) � �1 800 lb � ft (3)
la cual demuestra que la proyección de T sobre el vector � AE�� es una con-stante. Se concluye que T es mínima cuando es paralela al vector
� AE�� � (�23
�i � �23
�j � �13
�k) � (6i � 12j) � 4i � 2j � 4k
Como el vector unitario correspondiente es �23
�i � �13
�j � �23
�k, se escribe
Tmín � T(�23
�i � �13
�j � �23
�k) (4)
Al sustituir a T y a � AE�� en la ecuacién (3) y calcular los productos punto,se obtiene 6T � �1 800 y, por tanto, T � �300. Al llevar este valor a laecuación (4), se obtiene
Tmín � �200i � 100j � 200k Tmín � 300 lb
Ubicación de G. Como el vector EG�� y la fuerza Tmín tienen la mismadirección, sus componentes deben ser proporcionales. Representando las coordenadas de G con x, y, 0, se escribe
�x�
�
2006
� � �y�
�
10102
� � �0�
�
2006
� x � 0 y � 15 ft
12 ft
12 ft
450 lb
A
BC DE
G
6 ft6 ft
6 ft
A
B C DE
x
y
z
T
�
Dxi
Dy jDzk
A x i
Ay j
Azk
W = –450 j
6 ft
12 ft
12 ft
12 ft
6 ft
A
BC
D
G(x, y, 0)
E(6, 12, 6)
x
y
z
W
Tmín
196

R E S O L U C I Ó N D E P R O B L E M A SE N F O R M A I N D E P E N D I E N T E
En las secciones que se acaban de explicar se consideró el equilibrio de un cuerpotridimensional. Es muy importante que se dibuje un diagrama de cuerpo libre com-pleto como primer paso en la solución de un problema.
1. A medida que se dibuja el diagrama de cuerpo libre, se debe poner aten-ción especial en las reacciones en los apoyos. E1 número de incógnitas en unapoyo puede ir desde uno hasta seis (figura 4.10). Para decidir cuándo existe unareacción desconocida o una componente de reacción en un apoyo, es necesariocuestionarse si el apoyo impide el movimiento del cuerpo en una cierta direccióno alrededor de un cierto eje.
a) Si se impide el movimiento en una cierta dirección, se debe incluir enel diagrama de cuerpo libre una reacción o componente de reacción desconocidaque actúa en esa misma dirección.
b) Si un apoyo impide la rotación alrededor de un cierto eje, se debe in-cluir en el diagrama de cuerpo libre un par de magnitud desconocida que actúaalrededor de ese mismo eje.
2. Las fuerzas externas que actúan sobre un cuerpo tridimensional consti-tuyen un sistema equivalente a cero. Si se escribe �F � 0 y �MA � 0 con res-pecto a un punto apropiado A y se igualan a cero los coefıcientes de i, j y k en am-bas ecuaciones, se obtienen seis ecuaciones escalares. En general, estas ecuacionesse pueden resolver para conocer las seis incógnitas que contendrán.
3. Después de completar el diagrama de cuerpo libre, se puede tratar debuscar ecuaciones que involucren el menor número de incógnitas posible.Las siguientes estrategias pueden ser de utilidad.
a) Sumar momentos con respecto a un apoyo de rótula o a una bisagra, se ob-tienen ecuaciones en las cuales se han eliminado tres componentes de reacción des-conocidos [problemas resueltos 4.8 y 4.9].
b) Dibujar, si es posible, un eje a través de los puntos de aplicación de todaslas reacciones desconocidas, excepto una, y sumar momentos con respecto a dichoeje para obtener la ecuación con una incógnita [problema resuelto 4.10].
4. Después de dibujar el diagrama de cuerpo libre, se puede determinar laexistencia de una de las siguientes situaciones.
a) Las reacciones involucran menos de seis incógnitas; se dice que elcuerpo está parcialmente restringido y el cuerpo puede moverse. Sin embargo, esposible determinar las reacciones para una condición de carga dada [problema re-suelto 4.7].
b) Las reacciones involucran más de seis incógnitas; se dice que las reac-ciones son estáticamente indeterminadas. Aunque se pueden calcular una o dosreacciones, no es posible determinarlas todas [problema resuelto 4.10].
c) Las reacciones son paralelas o intersecan a la misma línea; se dice queel cuerpo está impropiamente restringido y se puede presentar movimiento bajouna condición general de carga.
197

198
Problemas
4.91 Una hoja de madera de 4 � 8 ft que tiene un peso de 34 lb hasido colocada temporalmente entre tres apoyos tubulares. El costado infe-rior de la hoja se apoya sobre pequeños collarínes en A y B y el costado su-perior se apoya en el tubo C. Sin tomar en cuenta la fricción entre todas lassuperficies en contacto, determine las reacciones en A, B y C.
4.92 Dos bandas de transmisión pasan sobre carretes soldados a un ejeque se sostiene mediante cojinetes en A y D. El carrete en B tiene un radiode 30 mm, y el carrete en C tiene un radio de 40 mm. Si se sabe que TB �80 N y que el sistema gira con una velocidad angular constante, determinelas reacciones en A y D. Suponga que el cojinete en A no ejerce ningunafuerza de empuje axial y no tome en cuenta los pesos de los carretes y el eje.
4.93 Retome el problema 4.92, ahora suponga que el carrete en C sesustituye por un carrete con 50 mm de radio.
Figura P4.91
4 ft
y
z
B
A
x
1 ft
3.75 ft3 ft
5 ft
3 ft
4 ft
C
TB
x
D
C
B
A
z
y
90 mm
90 mm
120 mm TC
Figura P4.92

4.94 Dos bandas de transmisión pasan sobre poleas soldadas a un ejeque se sostiene mediante cojinetes en B y D. Si la polea en A tiene un radiode 2.5 in., y la polea en C tiene un radio de 2 in. y se sabe que el sistemagira con una velocidad angular constante, determine a) la tensión T, b) lasreacciones en B y D. Suponga que el cojinete en D no ejerce ninguna fuerzade empuje axial y no tome en cuenta los pesos de las poleas y el eje.
4.95 Una palanca de 200 mm y una polea de 240 mm se sueldan al ejeBE que a su vez se sostiene mediante cojinetes en C y D. Si se aplica unacarga vertical de 720 N en A cuando la palanca está en posición horizontal,determine a) la tensión en la cuerda y b) las reacciones en C y D. Supongaque el cojinete en D no ejerce ninguna fuerza de empuje axial.
4.96 Retome el problema 4.95 y ahora suponga que el eje se ha rotado30° en sus cojinetes en el sentido de las manecillas del reloj y que la cargade 720 N permanece vertical.
Figura P4.94
Figura P4.95
30 lb
T
24 lb
18 lb
y8 in.
6 in.
A
BC
D
x
z
6 in.
T
720 N
y
80 mm 120 mm
120 mm
200 mm
AE
B
C
D
x
z
40 mm
199Problemas
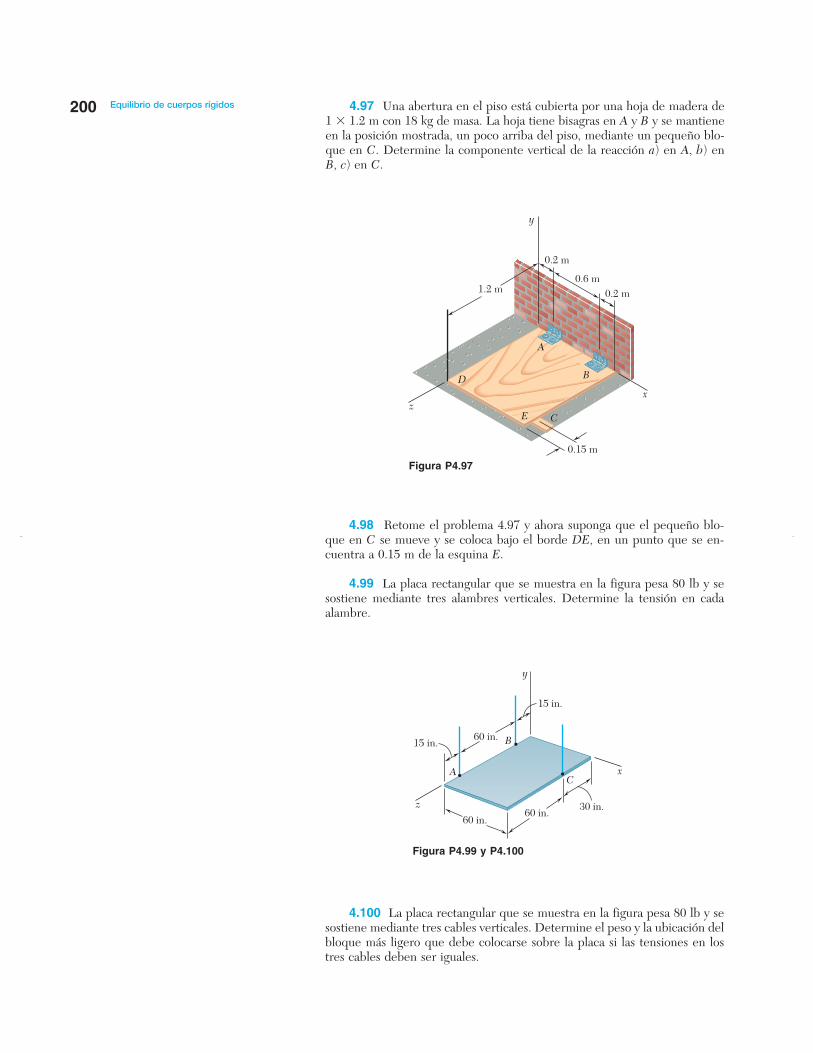
200 Equilibrio de cuerpos rígidos 4.97 Una abertura en el piso está cubierta por una hoja de madera de1 � 1.2 m con 18 kg de masa. La hoja tiene bisagras en A y B y se mantieneen la posición mostrada, un poco arriba del piso, mediante un pequeño blo-que en C. Determine la componente vertical de la reacción a) en A, b) enB, c) en C.
4.98 Retome el problema 4.97 y ahora suponga que el pequeño blo-que en C se mueve y se coloca bajo el borde DE, en un punto que se en-cuentra a 0.15 m de la esquina E.
4.99 La placa rectangular que se muestra en la figura pesa 80 lb y sesostiene mediante tres alambres verticales. Determine la tensión en cadaalambre.
4.100 La placa rectangular que se muestra en la figura pesa 80 lb y sesostiene mediante tres cables verticales. Determine el peso y la ubicación delbloque más ligero que debe colocarse sobre la placa si las tensiones en lostres cables deben ser iguales.
Figura P4.97
y
zx
A
B
E C
0.15 m
0.2 m
0.2 m0.6 m
1.2 m
D
Figura P4.99 y P4.100
xC
A
60 in.
60 in.60 in. 30 in.
15 in.
15 in.
B
z
y

201Problemas4.101 Dos tubos de acero AB y BC, cada uno con una masa por uni-dad de longitud igual a 8 kg/m, se sueldan juntos en B y se sostienen me-diante tres alambres. Si se sabe que a � 0.4 m, determine la tensión en cadaalambre.
4.102 Para el ensamble de tubos del problema 4.101, determine a) elvalor máximo permisible de a si el ensamble no debe ladearse y b) la tensióncorrespondiente en cada alambre.
4.103 La placa cuadrada de 24 lb que se muestra en la figura se sostienemediante tres alambres verticales. Determine a) la tensión en cada alambrecuando a � 10 in., b) el valor de a para el cual la tensión en cada alambre esde 8 lb.
4.104 La mesa que se muestra en la figura pesa 30 lb, tiene un diá-metro de 4 ft y se sostiene mediante tres patas igualmente espaciadas alre-dedor del borde. En la parte superior de la mesa en D se aplica una cargavertical P con magnitud de 100 lb. Determine el máximo valor de a tal quela mesa no se voltee. Muestre en un dibujo el área sobre la cual puede ac-tuar P sin voltear la mesa.
Figura P4.101
Figura P4.103
y
x
B C
A
a
30 in.
a
30 in.
z
AB
C
D
aP
Figura P4.104
B
A
C
D
y
x
z
a
1.2 m0.6 m
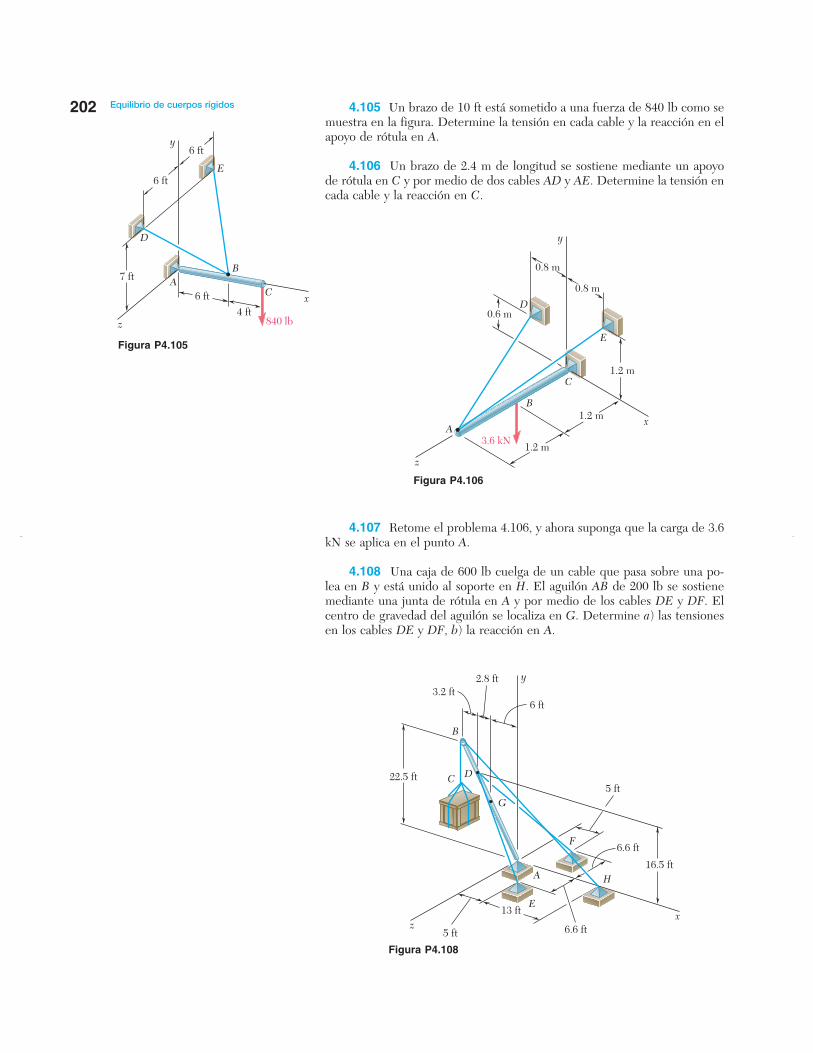
202 Equilibrio de cuerpos rígidos 4.105 Un brazo de 10 ft está sometido a una fuerza de 840 lb como semuestra en la figura. Determine la tensión en cada cable y la reacción en elapoyo de rótula en A.
4.106 Un brazo de 2.4 m de longitud se sostiene mediante un apoyode rótula en C y por medio de dos cables AD y AE. Determine la tensión encada cable y la reacción en C.
4.107 Retome el problema 4.106, y ahora suponga que la carga de 3.6kN se aplica en el punto A.
4.108 Una caja de 600 lb cuelga de un cable que pasa sobre una po-lea en B y está unido al soporte en H. El aguilón AB de 200 lb se sostienemediante una junta de rótula en A y por medio de los cables DE y DF. Elcentro de gravedad del aguilón se localiza en G. Determine a) las tensionesen los cables DE y DF, b) la reacción en A.
Figura P4.105
Figura P4.106
840 lb
x
y
z
E
AB
C
D
4 ft6 ft
7 ft
6 ft
6 ft
A
B
C
x
y
z
D
E
3.6 kN
1.2 m
1.2 m
1.2 m
0.6 m
0.8 m
0.8 m
Figura P4.108
x
y
E
G
A
B
C D22.5 ft
16.5 ft
5 ft
6.6 ft5 ft
13 ft
6 ft
2.8 ft3.2 ft
F
H
z
6.6 ft

Problemas 2034.109 Un poste de 3 m se sostiene mediante una junta de rótula en Ay por medio de los cables CD y CE. Si se sabe que la fuerza de 5 kN actúaverticalmente hacia abajo (φ � 0), determine a) la tensión en los cables CDy CE y b) la reacción en A.
4.110 Un poste de 3 m se sostiene mediante una junta de rótula en Ay por medio de los cables CD y CE. Si se sabe que la línea de acción de lafuerza de 5 kN forma un ángulo φ � 30° con el plano vertical xy, determinea) la tensión en los cables CD y CE y b) la reacción en A.
4.111 Un brazo de 48 in. se sostiene mediante una junta de rótula enC y dos cables BF y DAE; el cable DAE pasa alrededor de una polea sin fric-ción en A. Para la carga mostrada determine la tensión en cada cable y lareacción en C.
Figura P4.109 y P4.110
x
y
z
E
D
C
A1.5 m
2 m 1 m
1.2 m
1.2 m
B
5 kN f
A
BC
F
x
y
z
D
E
20 in.
16 in.
320 lb
30 in.
20 in.
48 in.
Figura P4.111

E
C
D
z
A
y
x
B
0.9 m
0.9 m0.6 m
30°
204 Equilibrio de cuerpos rígidos 4.112 Retome el problema 4.111, y ahora suponga que la carga de 320lb se aplica en A.
4.113 Una tapa de 20 kg en la abertura de un techo tiene bisagras enlas esquinas A y B. El tejado forma un ángulo de 30° con la horizontal y latapa se mantiene en posición horizontal mediante la barra CE. Determine a)la magnitud de la fuerza ejercida por la barra y b) las reacciones en las bisa-gras. Suponga que la bisagra en A no ejerce ninguna fuerza de empuje axial.
4.114 La varilla doblada ABEF se sostiene mediante cojinetes en C yD y por medio del alambre AH. Si se sabe que la porción AB de la varillatiene 250 mm de longitud, determine a) la tensión en el alambre AH, b) lasreacciones en C y D. Suponga que el cojinete en D no ejerce ninguna fuerzade empuje axial.
Figura P4.113
Figura P4.114
250 mm50 mm 300 mm
400 N
C
D
E
F xz
50 mm
250 mm
A B
H
y
30°

Problemas 2054.115 Una placa rectangular uniforme de 100 kg se sostiene en la po-sición mostrada por medio de bisagras en A y B y mediante el cable DCEque pasa por un gancho sin fricción en C. Si se supone que la tensión en am-bas porciones del cable es la misma, determine a) la tensión en el cable y b)las reacciones en A y B. Suponga que la bisagra en B no ejerce ninguna fuerzade empuje axial.
4.116 Retome el problema 4.115, y ahora suponga que el cable DCEse remplaza por un cable unido al punto E y al gancho C.
4.117 La placa rectangular de la figura pesa 75 lb y se mantiene en laposición mostrada mediante bisagras en A y B y por medio del cable EF. Sise supone que la bisagra en B no ejerce ninguna fuerza de empuje axial, de-termine a) la tensión en el cable y b) las reacciones en A y B.
4.118 Retome el problema 4.117, y ahora suponga que el cable EF sereemplaza por un cable unido a los puntos E y H.
Figura P4.115
690 mm
960 mm
x
y
z
E
D
A
B
C
675 mm90 mm
450 mm
270 mm
90 mm
x
y
z
D
H
F
E
A
B
C
25 in.
20 in.
4 in.
12 in.
8 in.
4 in.
30 in.
Figura P4.117

206 Equilibrio de cuerpos rígidos 4.119 Retome el problema 4.114, y ahora suponga que el cojinete enD se retira y que el cojinete en C puede ejercer pares alrededor de ejes pa-ralelos a los ejes y y z.
4.120 Retome el problema 4.117, y ahora suponga que la bisagra enB se retira y que la bisagra en A puede ejercer pares alrededor de ejes pa-ralelos a los ejes y y z.
4.121 El ensamble mostrado en la figura se usa para controlar la ten-sión T en una cinta que pasa alrededor de un carrete en E. El collarín C sesuelda a las varillas ABC y CDE. El collarín puede rotar alrededor del ejeFG pero su movimiento a lo largo del eje se evita mediante una rondana S.Para la carga mostrada determine a) la tensión T en la cinta y b) la reacciónen C.
4.122 El ensamble mostrado en la figura se suelda al collarín A, el cualestá colocado sobre el pasador vertical. El pasador puede ejercer pares alre-dedor de los ejes x y z, pero no restringe el movimiento alrededor o a lo largodel eje y. Para la carga mostrada determine la tensión en cada cable y la reac-ción en A.
Figura P4.121
T
A
B
C
F
D
E
S
G
x
y
z
6 lb2 in.
1.6 in.
4.2 in.
2.4 in.
T
Figura P4.122480 N
A
C
D
E
F
x
y
z
60 mm
45 mm
90 mm
120 mm
80 mm

Problemas 2074.123 El elemento rígido ABC en forma de L se sostiene mediantetres cables y un apoyo de rótula en A. Si se aplica una carga de 450 lb en F,determine la tensión en cada cable.
4.124 Retome el problema 4.123, y ahora suponga que la carga de 450lb se aplica en C.
4.125 El bastidor ABCD se sostiene mediante tres cables y un apoyode rótula en A. Para a � 150 mm, determine la tensión en cada cable y lareacción en A.
4.126 El bastidor ABCD se sostiene mediante tres cables y un apoyode rótula en A. Si se sabe que la carga de 350 N se aplica en D (a � 300mm), determine la tensión en cada cable y la reacción en A.
4.127 Tres varillas se sueldan entre sí para formar una “esquina” quese sostiene mediante tres armellas. Sin tomar en cuenta la fricción, deter-mine las reacciones en A, B y C cuando P � 240 lb, a � 12 in., b � 8 in. yc � 10 in.
4.128 Retome el problema 4.127, y ahora suponga que la fuerza P seretira y se sustituye por un par M � �(600 lb � in.)j que actúa en B.
x
z
y
A
B
C
D
EF
450 lb
24 in.
32 in.21 in.
21 in.
42 in.
42 in.
Figura P4.123
Figura P4.125 y P4.126
A
B
CH
DE
F
G
x
y
z
140 mm
350 N300 mm
140 mm
200 mm
a480 mm
Figura P4.127
x
y
z
b
cA
B
C
P
a

208 Equilibrio de cuerpos rígidos 4.129 Para limpiar la tubería de desagüe obstruida AE, un plomerodesconecta ambos extremos del tubo e inserta una guía a través de la aber-tura en A. La cabeza cortadora de la guía se conecta mediante un cable pe-sado a un motor eléctrico el cual rota a una velocidad constante mientras queel plomero introduce el cable en la tubería. Las fuerzas ejercidas por el plo-mero y el motor sobre el extremo del cable se pueden representar medianteuna llave de torsión F � �(48 N)k, M � �(90 N · m)k. Determine las re-acciones adicionales en B, C y D causadas por la operación de limpieza. Su-ponga que la reacción en cada soporte consta de dos componentes de lafuerza que son perpendiculares a la tubería.
4.130 Retome el problema 4.129, y ahora suponga que el plomeroejerce una fuerza F � �(48 N)k y que el motor se desconecta (M � 0).
4.131 El ensamble que se muestra en la figura consiste en una varillaAF de 80 mm, la cual está soldada a una cruz formada por 4 brazos de 200mm. El ensamble se sostiene mediante una junta de rótula en F y por me-dio de tres lazos cortos, cada uno forma un ángulo de 45° con la vertical.Para la carga mostrada, determine a) la tensión en cada lazo y b) la reacciónen F.
Figura P4.129
Figura P4.131
0.5 m x
y
z
A
B
DE
O
3 m1 m
2 m
1 m
C
x
y
z
E
F
A
B
P
CD
45º
45º
45º
200 mm 200 mm
200 mm200 mm
80 mm

Problemas 2094.132 La barra uniforme AB de 10 kg se sostiene mediante una juntade rótula en A y por medio de la cuerda CG, que se encuentra unida al puntomedio G de la barra. Si se sabe que la barra está recargada contra una pa-red vertical sin fricción en B, determine a) la tensión en la cuerda, b) lasreacciones en A y en B.
4.133 La barra doblada ABDE se sostiene por medio de rótulas en Ay E y mediante el cable DF. Si se aplica una carga de 60 lb en C como semuestra en la figura, determine la tensión en el cable.
4.134 Retome el problema 4.133, y ahora suponga que el cable DF sereemplaza por un cable que conecta a B y F.
4.135 La placa ABCD de 50 kg se sostiene por medio de bisagras a lolargo del borde AB y mediante el alambre CE. Si se sabe que la placa esuniforme, determine la tensión en el alambre.
4.136 Retome el problema 4.135, y ahora suponga que el alambre CEse reemplaza por un alambre que conecta a E y D.
Figura P4.132
x
y
z
GO
A
B
C150 mm
150 mm
400 mm
600 mm
Figura P4.133
x
y
z
A
B
C
D
E
F
8 in.
7 in.
9 in.
60 lb11 in.
16 in.
10 in.
14 in.
Figura P4.135
x
y
z
A
B
C
D
E
240 mm
400 mm
400 mm
200 mm200 mm
480 mm
240 mm
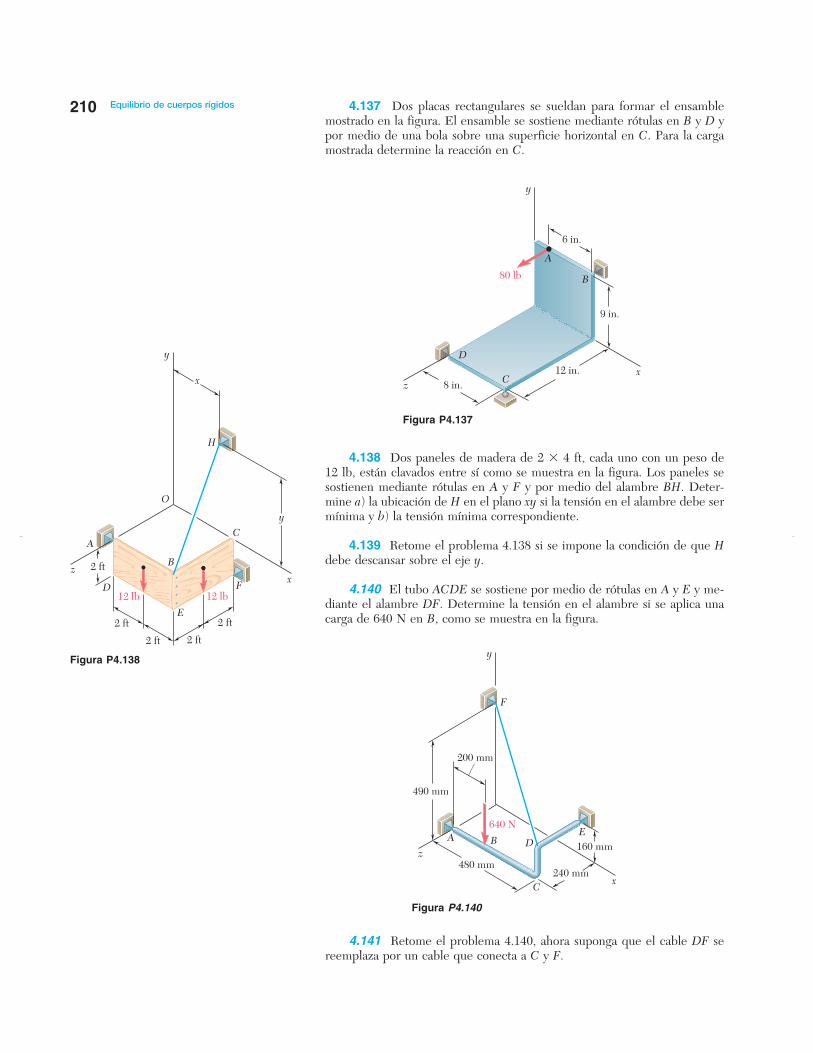
210 Equilibrio de cuerpos rígidos 4.137 Dos placas rectangulares se sueldan para formar el ensamblemostrado en la figura. El ensamble se sostiene mediante rótulas en B y D ypor medio de una bola sobre una superficie horizontal en C. Para la cargamostrada determine la reacción en C.
4.138 Dos paneles de madera de 2 � 4 ft, cada uno con un peso de12 lb, están clavados entre sí como se muestra en la figura. Los paneles sesostienen mediante rótulas en A y F y por medio del alambre BH. Deter-mine a) la ubicación de H en el plano xy si la tensión en el alambre debe sermínima y b) la tensión mínima correspondiente.
4.139 Retome el problema 4.138 si se impone la condición de que Hdebe descansar sobre el eje y.
4.140 El tubo ACDE se sostiene por medio de rótulas en A y E y me-diante el alambre DF. Determine la tensión en el alambre si se aplica unacarga de 640 N en B, como se muestra en la figura.
4.141 Retome el problema 4.140, ahora suponga que el cable DF sereemplaza por un cable que conecta a C y F.
Figura P4.138
Figura P4.140
B
A
y
z
D
Cx
6 in.
12 in.8 in.
9 in.
80 lb
Figura P4.137
z 2 ft
2 ft
2 ft
2 ft
2 ft
x
x
y
y
A
B
C
O
H
D
E
F12 lb12 lb
640 N
x
y
z
A B
C
DE
F
240 mm
160 mm
480 mm
200 mm
490 mm

SECCIÓN 1.1 Introducción a la mecánica de materiales 3
Tensión, compresión
y cortante
1
ASPECTOS GENERALES DEL CAPÍTULO
En este capítulo se presenta una introducción a la mecánica de materiales, que analiza los esfuerzos, las deformaciones unitarias y los desplazamien-tos en barras de diferentes materiales sometidas a cargas axiales aplicadas en los centroides de sus secciones transversales. Aprenderemos acerca del esfuerzo normal (s) y la deformación unitaria normal (�) en materiales empleados en aplicaciones estructurales, luego identifi caremos las propie-dades clave de diversos materiales, como el módulo de elasticidad (E), la fl uencia (sy) y los esfuerzos de rotura (su), a partir de gráfi cas del esfuer-zo (s) en función de la deformación unitaria (�). También grafi caremos el esfuerzo cortante (t) en función de la deformación unitaria por esfuerzo cortante (g) e identifi caremos el coefi ciente de elasticidad en cortante (G). Si estos materiales sólo se desempeñan en el modo elástico, el esfuerzo y la deformación unitaria están relacionadas por la ley de Hooke para esfuerzo normal y deformación unitaria normal (s = E � �) y también para el esfuer-zo cortante y la deformación unitaria en cortante (t = G � g). Veremos que los cambios en las dimensiones laterales y en el volumen dependen de la relación de Poisson (n). De hecho, las propiedades de los materiales E, G y n, están directamente relacionadas entre sí y no son propiedades indepen-dientes del material.
El ensambaje de barras para formar estructuras (como armaduras) nos lleva a considerar los esfuerzos cortante promedio (t) y de aplastamiento (sb) en sus conexiones, así como los esfuerzos normales que actúan sobre el área neta de la sección transversal (si está en tensión) o sobre toda el área de la sección transversal (si está en compresión). Si restringimos los esfuerzos máximos en cualquier punto a valores permisibles mediante el uso de factores de seguridad, podemos identifi car los niveles permisibles de las cargas axiales para sistemas simples, como cables y barras. Los factores de seguridad relacionan la resistencia real con la requerida de los elementos estructurales, y consideran una variedad de incertidumbres, como variacio-nes en las propiedades del material y la probabilidad de una sobrecarga accidental. Por último, consideraremos el diseño: que es el proceso iterativo mediante el cual se determina el tamaño apropiado de los elementos es-tructurales para cumplir con una variedad de requisitos tanto de resistencia como de rigidez para una estructura particular sometida a una variedad de cargas diferentes.
3
El capítulo 1 está organizado como sigue:
1.1 Introducción a la mecánica de materiales 5
1.2 Esfuerzo normal y deformación unitaria normal 7
1.3 Propiedades mecánicas de los materiales 15
1.4 Elasticidad, plasticidad y termofl uencia 24
1.5 Elasticidad lineal, ley de Hooke y relación de Poisson 27
1.6 Esfuerzo cortante y deformación unitaria cortante 32
1.7 Esfuerzos y cargas permisibles 43
1.8 Diseño por cargas axiales y cortante directo 49Resumen y repaso del capítulo 55Problemas 57
4 CAPÍTULO 1 Tensión, compresión y cortante

1.1 INTRODUCCIÓN A LA MECÁNICA DE MATERIALES
La mecánica de materiales es una rama de la mecánica aplicada que tra-ta del comportamiento de los cuerpos sólidos sometidos a diversas cargas. Otros nombres para este campo de estudio son resistencia de materiales y mecánica de los cuerpos deformables. Los cuerpos sólidos considerados en este libro incluyen barras sometidas a cargas axiales, ejes en torsión, vigas en fl exión y columnas en compresión.
El objetivo principal de la mecánica de materiales es determinar los esfuerzos, las deformaciones unitarias y los desplazamientos en estructuras y sus componentes debidas a las cargas que actúan sobre ellas. Si podemos determinar estas cantidades para todos los valores de las cargas incluyendo las que causan la falla, tendremos una representación completa del compor-tamiento mecánico de esas estructuras.
Comprender el comportamiento mecánico es esencial para el diseño seguro de todos los tipos de estructuras, ya sean aeroplanos y antenas, edi-fi cios y puentes, máquinas y motores o barcos y naves espaciales. Esta es la razón por la cual la mecánica de materiales es una disciplina básica en muchos campos de la ingeniería. La estática y la dinámica también son esenciales, pero estos temas tratan principalmente con las fuerzas y los mo-vimientos asociados con partículas y cuerpos rígidos. En la mecánica de materiales vamos un paso más allá al analizar los esfuerzos y las deforma-ciones unitarias dentro de cuerpos reales; es decir, cuerpos de dimensiones fi nitas que se deforman con cargas. Para determinar los esfuerzos y las de-formaciones unitarias, empleamos las propiedades físicas de los materiales, así como numerosas leyes y conceptos teóricos.
Los análisis teóricos y los resultados experimentales desempeñan pa-peles igualmente importantes en la mecánica de materiales. Empleamos teorías para deducir fórmulas y ecuaciones para predecir el comportamiento mecánico, pero no se pueden usar esas expresiones en un diseño práctico, a menos que se conozcan las propiedades físicas de los materiales. Esas pro-piedades se conocen sólo después de que se han efectuado experimentos cui-dadosos en el laboratorio. Además, no todos los problemas prácticos facili-tan al análisis teórico y en esos casos las pruebas físicas son una necesidad.
El desarrollo histórico de la mecánica de materiales es una mezcla fas-cinante tanto de teoría como de experimentación, la teoría ha señalado el ca-mino para obtener resultados útiles en algunos casos y la experimentación lo ha hecho en otros. Algunos personajes famosos como Leonardo da Vinci (1452-1519) y Galileo Galilei (1564-1642) realizaron experimentos para determinar la resistencia de alambres, barras y vigas, si bien no desarrolla-ron teorías adecuadas (con respecto a las normas actuales) para explicar los resultados de sus pruebas. En contraste, el famoso matemático Leonhard Euler (1707-1783) desarrolló la teoría matemática de las columnas y en 1744 calculó la carga crítica de una columna, mucho antes que existiera al-guna evidencia experimental que demostrara la importancia de sus resulta-dos. Sin ensayos apropiados para apoyar sus teorías, los resultados de Euler permanecieron sin usarse durante más de cien años, aunque en la actualidad constituyen la base del diseño y análisis de la mayoría de las columnas.*
*La historia de la mecánica de materiales, iniciando con Leonardo da Vinci y Galileo Galilei, se encuentra en las referencias 1-1, 1-2 y 1-3.
SECCIÓN 1.1 Introducción a la mecánica de materiales 5

6 CAPÍTULO 1 Tensión, compresión y cortante
Problemas
Al estudiar la mecánica de materiales descubrirá que el tema está dividido de manera natural en dos partes: primero, en comprender el desarrollo de los conceptos y segundo, aplicar estos conceptos a situaciones prácticas. Lo primero se logra estudiando las deducciones, explicaciones y ejemplos que aparecen en cada capítulo, y lo segundo se logra resolviendo los problemas al fi nal de cada capítulo. Algunos de los problemas son de carácter numéri-co y otros son simbólicos (o algebraicos).
Una ventaja de los problemas numéricos es que las magnitudes de to-das las cantidades son evidentes en cada etapa de los cálculos, lo que per-mite observar si los valores son razonables o no. La ventaja principal de los problemas simbólicos es que conducen a fórmulas de propósito general. Una fórmula presenta las variables que afectan los resultados fi nales; por ejemplo, en la solución es posible cancelar una cantidad, un hecho que no sería evidente en una solución numérica. Además, una solución algebraica muestra la manera en que cada variable afecta los resultados, como cuando una variable aparece en el numerador y otra en el denominador. Además, una solución simbólica permite comprobar las dimensiones en cada etapa del trabajo.
Por último, la razón más importante para resolver problemas de ma-nera algebraica es obtener una fórmula general que se pueda emplear para muchos problemas diferentes. En contraste, una solución numérica sólo se aplica a un conjunto de circunstancias. Como los ingenieros deben ser ex-pertos en las dos clases de soluciones, usted encontrará una mezcla de pro-blemas numéricos y simbólicos en todo el libro.
Los problemas numéricos requieren trabajar con unidades específi cas de medida. De acuerdo con la práctica actual de la ingeniería moderna, en este libro se utiliza tanto el Sistema Internacional de unidades (SI) como el sistema inglés (acostumbrado en Estados Unidos). En el apéndice A se encuentra una descripción de los dos sistemas, donde también se encuentran muchas tablas útiles, incluida una de factores de conversión.
Todos los problemas se localizan al fi nal de los capítulos con sus nú-meros respectivos y los números subsiguientes identifi can las secciones a que pertenecen. En el caso de los problemas que requieren soluciones nu-méricas, los problemas impares están planteados en unidades inglesas y los pares en unidades SI.
En el apéndice B se describen con detalle las técnicas para resolver problemas, además de una lista de procedimientos ingenieriles sólidos. El apéndice B incluye secciones sobre homogeneidad dimensional y cifras sig-nifi cativas. Estos temas son especialmente importantes, debido a que cada ecuación debe ser homogénea dimensionalmente y cada resultado numérico debe expresarse con el número adecuado de dígitos signifi cativos. En este libro los resultados numéricos fi nales, en general, se presentan con tres dí-gitos signifi cativos, cuando un número inicia con los dígitos 2 al 9, y con cuatro dígitos signifi cativos cuando un número principia con el dígito 1. Con frecuencia los valores intermedios se registran con dígitos adicionales para evitar perder precisión debido al redondeo de números.
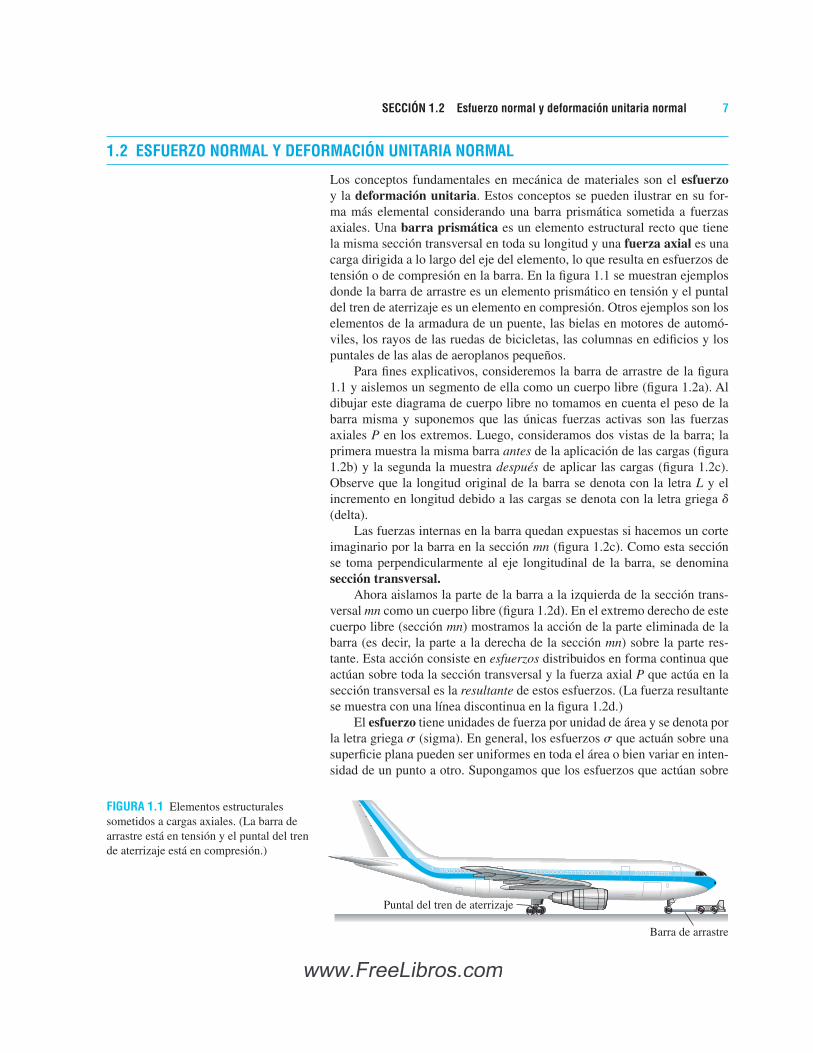
1.2 ESFUERZO NORMAL Y DEFORMACIÓN UNITARIA NORMAL
Los conceptos fundamentales en mecánica de materiales son el esfuerzo y la deformación unitaria. Estos conceptos se pueden ilustrar en su for-ma más elemental considerando una barra prismática sometida a fuerzas axiales. Una barra prismática es un elemento estructural recto que tiene la misma sección transversal en toda su longitud y una fuerza axial es una carga dirigida a lo largo del eje del elemento, lo que resulta en esfuerzos de tensión o de compresión en la barra. En la fi gura 1.1 se muestran ejemplos donde la barra de arrastre es un elemento prismático en tensión y el puntal del tren de aterrizaje es un elemento en compresión. Otros ejemplos son los elementos de la armadura de un puente, las bielas en motores de automó-viles, los rayos de las ruedas de bicicletas, las columnas en edifi cios y los puntales de las alas de aeroplanos pequeños.
Para fi nes explicativos, consideremos la barra de arrastre de la fi gura 1.1 y aislemos un segmento de ella como un cuerpo libre (fi gura 1.2a). Al dibujar este diagrama de cuerpo libre no tomamos en cuenta el peso de la barra misma y suponemos que las únicas fuerzas activas son las fuerzas axiales P en los extremos. Luego, consideramos dos vistas de la barra; la primera muestra la misma barra antes de la aplicación de las cargas (fi gura 1.2b) y la segunda la muestra después de aplicar las cargas (fi gura 1.2c). Observe que la longitud original de la barra se denota con la letra L y el incremento en longitud debido a las cargas se denota con la letra griega d (delta).
Las fuerzas internas en la barra quedan expuestas si hacemos un corte imaginario por la barra en la sección mn (fi gura 1.2c). Como esta sección se toma perpendicularmente al eje longitudinal de la barra, se denomina sección transversal.
Ahora aislamos la parte de la barra a la izquierda de la sección trans-versal mn como un cuerpo libre (fi gura 1.2d). En el extremo derecho de este cuerpo libre (sección mn) mostramos la acción de la parte eliminada de la barra (es decir, la parte a la derecha de la sección mn) sobre la parte res-tante. Esta acción consiste en esfuerzos distribuidos en forma continua que actúan sobre toda la sección transversal y la fuerza axial P que actúa en la sección transversal es la resultante de estos esfuerzos. (La fuerza resultante se muestra con una línea discontinua en la fi gura 1.2d.)
El esfuerzo tiene unidades de fuerza por unidad de área y se denota por la letra griega s (sigma). En general, los esfuerzos s que actuán sobre una superfi cie plana pueden ser uniformes en toda el área o bien variar en inten-sidad de un punto a otro. Supongamos que los esfuerzos que actúan sobre
FIGURA 1.1 Elementos estructurales sometidos a cargas axiales. (La barra de arrastre está en tensión y el puntal del tren de aterrizaje está en compresión.)
Barra de arrastre
Puntal del tren de aterrizaje
SECCIÓN 1.2 Esfuerzo normal y deformación unitaria normal 7

8 CAPÍTULO 1 Tensión, compresión y cortante
la sección transversal mn (fi gura 1.2d) están distribuidos uniformemente sobre el área. Entonces la resultante de estos esfuerzos debe ser igual a la magnitud del esfuerzo por el área de la sección transversal A de la barra, es decir, P = sA. Por tanto, obtenemos la expresión siguiente para la magni-tud de los esfuerzos:
sP
A (1.1)
Esta ecuación expresa la intensidad de un esfuerzo uniforme en una barra prismática con sección transversal arbitraria cargada axialmente.
Cuando la barra es estirada por las fuerzas P, los esfuerzos son es-fuerzos de tensión; si se invierte la dirección de las fuerzas, la barra se comprime y tenemos esfuerzos de compresión. Puesto que los esfuerzos actúan en una dirección perpendicular a la superfi cie cortada, se denominan esfuerzos normales. Y, por tanto, los esfuerzos normales pueden ser de tensión o de compresión. Más adelante, en la sección 1.6, analizaremos otro tipo de esfuerzo, denominado esfuerzo cortante, que actúa paralelo a la superfi cie.
Cuando se requiere una convención de signos para los esfuerzos nor-males, se acostumbra defi nir a los esfuerzos de tensión como positivos y a los esfuerzos de compresión como negativos.
Puesto que el esfuerzo normal s se obtiene dividiendo la fuerza axial entre el área de la sección transversal, tiene unidades de fuerza por unidad de área. Cuando se emplean unidades inglesas, el esfuerzo suele expresarse en libras por pulgada cuadrada (psi) o kips por pulgada cuadrada (ksi).* Por ejemplo, suponga que la barra de la fi gura 1.2 tiene un diámetro d de 2.0 in
FIGURA 1.2 Barra prismática en tensión: (a) diagrama de cuerpo libre de un segmento de la barra, (b) segmento de la barra antes de la aplicación de las cargas, (c) segmento de la barra después de la aplicación de las cargas y (d) esfuerzos normales en la barra.
*Un kip, o kilolibra, es igual a 1000 lb.
d
P
(a)
P
P
(c)
(d)
P
P P
—AP=
(b)
m
n
m
n
L
L + d
s

y que la carga P tiene una magnitud de 6 kips. Entonces el esfuerzo en la barra es
P
A d
P2/4 (2.
6
0
k
in)2/41.91 ksi (o 1910 psi)
En este ejemplo el esfuerzo es de tensión o positivo.Cuando se utilizan unidades SI, la fuerza se expresa en newtons (N) y
el área en metros cuadrados (m2). En consecuencia, el esfuerzo tiene uni-dades de newtons por metro cuadrado (N/m2), es decir, pascales (Pa). Sin embargo, el pascal es una unidad de esfuerzo tan pequeña que es necesario trabajar con múltiplos grandes, usualmente con el megapascal (MPa).
Para demostrar que un pascal es en efecto pequeño, sólo tenemos que observar que se requieren casi 7000 pascales para igualar un psi.* Como un ejemplo, el esfuerzo en la barra descrita en el ejemplo anterior (1.91 ksi) se convierte en 13.2 MPa, que es igual a 13.2 × 106 pascales. Aunque no se recomienda emplearlo en el SI, algunas veces el esfuerzo se expresa en newtons por milímetro cuadrado (N/mm2), que es una unidad igual al megapascal (MPa).
Limitaciones
La ecuación s = P/A sólo es válida si el esfuerzo está uniformemente distri-buido sobre la sección transversal de la barra. Esta condición se cumple si la fuerza axial P actúa en el centroide del área de la sección transversal, como se demuestra más adelante en esta sección. Cuando la carga P no actúa en el centroide, se tendrá una fl exión de la barra y se requiere de un análisis más complicado (consulte las secciones 5.12 y 11.5). Sin embargo, en este libro (así como en la práctica común) se entiende que las fuerzas axiales se aplican en los centroides de las secciones transversales a menos que se indique otra cosa.
La condición de esfuerzo uniforme representada en la fi gura 1.2d se tie-ne en toda la longitud de la barra, excepto cerca de los extremos. La distri-bución del esfuerzo en el extremo de la barra depende de cómo se transmite la carga P a la barra. Si sucede que la carga está uniformemente distribuida sobre el extremo, entonces el patrón de esfuerzos será el mismo en otras partes. Sin embargo, es más probable que la carga se transmita mediante un pasador o un perno, produciendo esfuerzos muy localizados denominados concentraciones de esfuerzos.
Una posibilidad se ilustra mediante la barra de ojo de la fi gura 1.3. En este caso las cargas P se transmiten a la barra mediante pasadores que pasan por los agujeros (u ojos) en los extremos de la barra. Por tanto, las fuerzas mostradas en la fi gura en realidad son las resultantes de las presiones de apoyo entre los pasadores y la barra de ojo, y la distribución de esfuerzo alre-dedor de los agujeros es muy compleja. No obstante, conforme nos alejamos de los extremos hacia el centro de la barra, la distribución del esfuerzo gra-dualmente tiende a la distribución uniforme representada en la fi gura 1.2d.
Como regla práctica, se puede emplear la fórmula s = P/A, con buena precisión en cualquier punto dentro de una barra prismática que esté alejado
*Los factores de conversión entre las unidades inglesas y las unidades SI, se encuentran en la tabla A.5 del apéndice A.
FIGURA 1.3 Barra de ojo hecha de acero sometida a cargas de tensión P.
b
PP
SECCIÓN 1.2 Esfuerzo normal y deformación unitaria normal 9
10 CAPÍTULO 1 Tensión, compresión y cortante
de la concentración de esfuerzos al menos una distancia igual a la dimen-sión lateral mayor de la barra. En otras palabras, la distribución del esfuerzo en la barra de ojo de la fi gura 1.3 es uniforme a distancias b o mayores desde los extremos agrandados, donde b es el ancho de la barra, y la distribución del esfuerzo en la barra prismática de la fi gura 1.2 es uniforme a distancias d o mayores desde los extremos, donde d es el diámetro de la barra (fi gura 1.2d). En la sección 2.10 se analizan con más detalle las concentraciones de esfuerzos producidas por cargas axiales.
Por supuesto, aun cuando el esfuerzo no esté distribuido uniformemen-te, la ecuación s = P/A es de utilidad debido a que proporciona el esfuerzo normal promedio sobre la sección transversal.
Deformación unitaria normal
Como ya vimos, una barra recta cambiará su longitud al cargarla axialmen-te, haciéndose más larga en tensión y más corta en compresión. Por ejem-plo, considere de nuevo la barra prismática de la fi gura 1.2. El alargamiento d de esta barra (fi gura 1.2c) es el resultado acumulativo del alargamiento de todos los elementos del material en todo el volumen de la barra. Suponga-mos que el material es el mismo en toda la barra. Entonces, si consideramos la mitad de la barra (longitud L /2), tendrá un alargamiento igual a d/2 y si consideramos un cuarto de la barra, tendrá un alargamiento igual a d/4.
En general, el alargamiento de un segmento es igual a su longitud di-vidida entre la longitud total L y multiplicada por el alargamiento d. Por tanto, una longitud unitaria de la barra tendrá un alargamiento igual a 1/L por d. Esta cantidad se denomina alargamiento por unidad de longitud, o deformación unitaria y se denota con la letra griega � (épsilon). Podemos observar que la deformación unitaria está dada por la ecuación
e 5 L
d (1.2)
Si la barra está en tensión, la deformación unitaria se denomina deforma-ción unitaria por tensión, que representa un alargamiento o estiramiento del material. Si la barra está en compresión, la deformación unitaria es una deformación unitaria por compresión y la barra se acorta. En general, la deformación unitaria por tensión se considera positiva y la deformación unitaria por compresión como negativa. La deformación unitaria � se de-nomina deformación unitaria normal debido a que está asociada con los esfuerzos normales.
Como la deformación unitaria normal es la razón de dos longitudes, es una cantidad adimensional, es decir, no tiene unidades. Por tanto, la de-formación unitaria se expresa simplemente como un número, independiente de cualquier sistema de unidades. Los valores numéricos de la deformación unitaria suelen ser muy pequeños, debido a que las barras hechas de mate-rial estructural sólo experimentan cambios pequeños de longitud cuando se someten a cargas.
Como ejemplo, considere una barra de acero con longitud L igual a 2.0 m. Al ser sometida a una carga de tensión muy pesada, podría alargarse 1.4 mm, lo que signifi ca que la deformación unitaria es
e 5 L
d 1
2
.4
.0
m
m
m0.0007 700 10 6
En la práctica, las unidades originales de d y L algunas veces se dan en la de-formación unitaria misma y entonces ésta se registra en formas como mm/m, μm/m e in/in. Por ejemplo, la deformación unitaria � en el ejemplo anterior podría expresarse como 700 μm/m o 700 × 10–6 in/in. Además, en ocasiones la deformación unitaria se expresa como un porcentaje, en especial cuando es grande. (En el ejemplo anterior, la deformación es 0.07 por ciento).
Esfuerzo uniaxial y deformación unitaria uniaxial
Las defi niciones de esfuerzo normal y deformación unitaria normal se basan en consideraciones puramente estáticas y geométricas, lo que signifi ca que las ecuaciones (1.1) y (1.2) se pueden emplear para cargas de cualquier magnitud y para cualquier material. El requisito principal es que la deformación de la barra sea uniforme en todo su volumen, lo que a su vez requiere que la barra sea prismática, que las cargas pasen por los centroides de las secciones trans-versales y que el material sea homogéneo (es decir, que sea el mismo en todas las partes de la barra). El estado de esfuerzo y de deformación unitaria resul-tantes se denomina esfuerzo uniaxial y deformación unitaria uniaxial.
Más adelante en la sección 2.6 se darán explicaciones adicionales del es-fuerzo uniaxial, incluyendo esfuerzos en otras direcciones además de la direc-ción longitudinal de la barra. En el capítulo 7 también analizaremos estados de esfuerzos más complicados, como el esfuerzo biaxial y el esfuerzo plano.
Línea de acción de las fuerzas axiales para una distribución uniforme del esfuerzo
En todo el análisis anterior del esfuerzo y de la deformación unitaria en una barra prismática supusimos que el esfuerzo normal s estaba distribuido uniformemente sobre su sección transversal. Ahora demostraremos que esta condición se cumple si la línea de acción de las fuerzas axiales pasa por el centroide del área de la sección transversal.
Considere una barra prismática con sección transversal arbitraria so-metida a fuerzas axiales P que producen esfuerzos s distribuidos unifor-memente (fi gura 1.4a). Sea p1 el punto en la sección transversal donde la línea de acción de las fuerzas interseca la sección transversal (fi gura 1.4b). Si trazamos un conjunto de ejes xy en el plano de la sección transversal y denotamos las coordenadas del punto p1 con x y y. Para determinar esas coordenadas, observamos que los momentos Mx y My de la fuerza P con respecto a los ejes x y y, respectivamente, deben ser iguales a los momentos correspondientes de los esfuerzos distribuidos uniformemente.
Los momentos de la fuerza P son
Mx Py My Px (a,b)
en donde un momento se considera positivo cuando su vector (empleando la regla de la mano derecha) actúa en la dirección positiva del eje corres-pondiente.*
*Para visualizar la regla de la mano derecha, imagine que toma un eje de coordenadas con la mano derecha, de tal manera que los dedos estén alrededor del eje y el dedo pulgar apunta en la dirección positiva del eje. Entonces un momento es positivo si actúa con respecto al eje en la misma dirección de los dedos.
SECCIÓN 1.2 Esfuerzo normal y deformación unitaria normal 11

12 CAPÍTULO 1 Tensión, compresión y cortante
Los momentos de los esfuerzos distribuidos se obtienen integrando sobre el área de la sección transversal A. La fuerza diferencial que actúa sobre un elemento del área dA (fi gura 1-4b) es igual a sdA. Los momentos de esta fuerza elemental con respecto a los ejes x y y son sydA y –sxdA, respec-tivamente, en donde x y y denotan las coordenadas del elemento dA. Los momentos totales se obtienen integrando sobre el área de la sección trans-versal:
Mx sydA My sxdA (c,d)
Estas expresiones dan los momentos producidos por los esfuerzos s.Luego, igualamos los momentos Mx y My obtenidos para la fuerza P
(ecuaciones a y b) con los momentos obtenidos a partir de los esfuerzos distribuidos (ecuaciones c y d):
Py sydA Px sx dA
Como los esfuerzos s están distribuidos uniformemente, sabemos que son constantes sobre el área A de la sección transversal y se pueden poner fuera de los signos de integración. Además, sabemos que s es igual a P/A. Por tanto, obtenemos las fórmulas siguientes para las coordenadas del pun -to p1:
y xx dA
A
y dA
A (1.3a,b)
Estas ecuaciones son iguales a las que defi nen las coordenadas del centroide de un área (consulte las ecuaciones 12.3a y b en el capítulo 12). Por tanto, ahora hemos llegado a una conclusión importante: a fi n de tener una ten-sión o compresión uniforme en una barra prismática, la fuerza axial debe actuar en el centroide del área de la sección transversal. Como explicamos antes, siempre suponemos que estas condiciones se cumplen a menos que se especifi que de otra manera.
Los ejemplos siguientes ilustran el cálculo de esfuerzos y deformacio-nes unitarias en barras prismáticas. En el primer ejemplo ignoramos el peso de la barra y en el segundo lo incluimos. (Cuando se resuelven problemas del libro de texto es usual omitir el peso de la estructura a menos que se pida incluirlo).
FIGURA 1.4 Distribución uniforme de esfuerzos en una barra prismática: (a) fuerzas axiales P y (b) sección transversal de la barra.
P
P
(a)
PA
=s
(b)
O
y
y
x
A
p1
dA
x
x–
y–

Ejemplo 1.1
Un poste corto, construido con un tubo circular hueco de aluminio, soporta una carga de compresión de 26 kips (fi gura 1.5). Los diámetros interior y exterior del tubo son d1 = 4.0 in y d2 = 4.5 in, respectivamente, y su longitud es 16 in. El acor-tamiento del poste debido a la carga es de 0.012 in.
Determine el esfuerzo de compresión y la deformación unitaria en el poste. (No tenga en cuenta el peso del poste y suponga que éste no se pandea con la carga.)
FIGURA 1.5 Ejemplo 1.1. Poste hueco de aluminio en compresión.
SoluciónSuponiendo que la carga de compresión actúa en el centro del tubo hueco, po-
demos emplear la ecuación s = P/A (ecuación 1.1) para calcular el esfuerzo normal. La fuerza P es igual a 26 k (o 26,000 lb) y el área A de la sección transversal es
A p
4d 22 d 21
p
4(4.5 in)2 (4.0 in)2 3.338 in2
Por tanto, el esfuerzo de compresión en el poste es
s P
A 3
2
.
6
3
,
3
0
8
00
in
lb2 7790 psi
La deformación unitaria de compresión (de la ecuación 1.2) es
e L
d 0.
1
0
6
12
in
in750 10 6
De esta manera hemos calculado el esfuerzo y la deformación unitaria en el poste.Nota: como se explicó antes, la deformación unitaria es una cantidad adimen-
sional y, por tanto, no se requiere indicar unidades para ella. Sin embargo, por cla-ridad, a menudo se le dan unidades. En este ejemplo, � se podría escribir como 750 × 10–6 in/in o 750 μin/in.
16 in
26 k
SECCIÓN 1.2 Esfuerzo normal y deformación unitaria normal 13
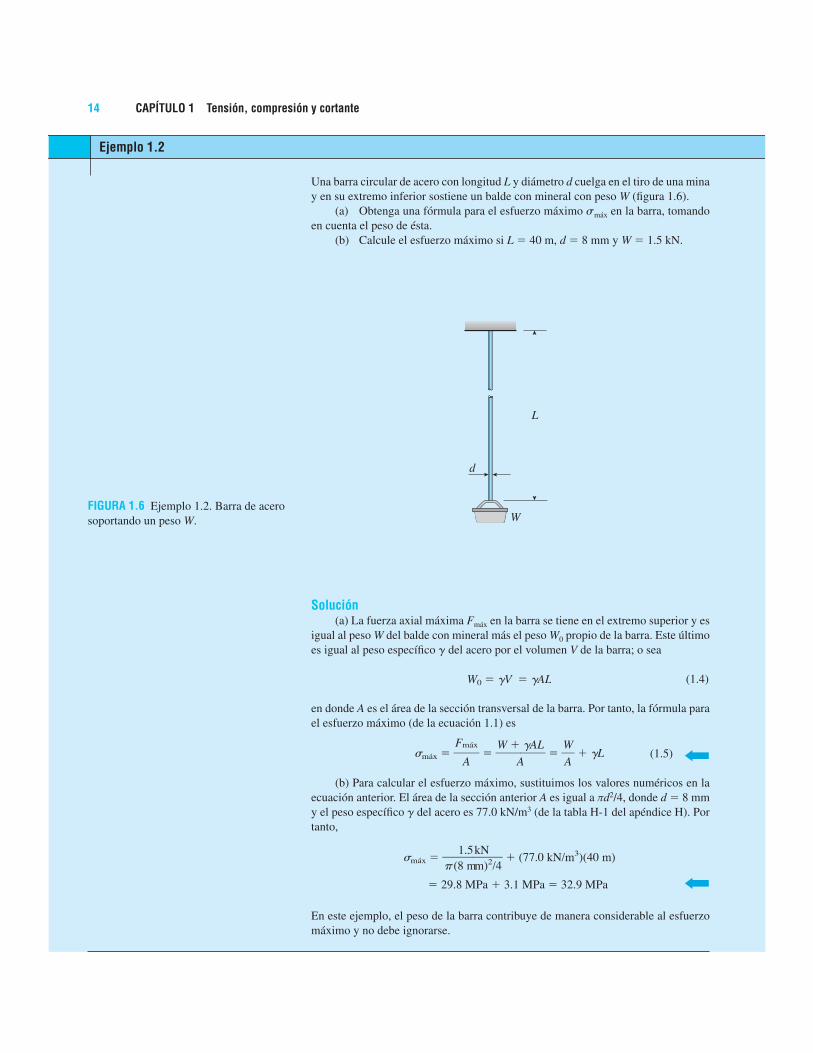
14 CAPÍTULO 1 Tensión, compresión y cortante
Ejemplo 1.2
Una barra circular de acero con longitud L y diámetro d cuelga en el tiro de una mina y en su extremo inferior sostiene un balde con mineral con peso W (fi gura 1.6).
(a) Obtenga una fórmula para el esfuerzo máximo smáx en la barra, tomando en cuenta el peso de ésta.
(b) Calcule el esfuerzo máximo si L = 40 m, d = 8 mm y W = 1.5 kN.
Solución(a) La fuerza axial máxima Fmáx en la barra se tiene en el extremo superior y es
igual al peso W del balde con mineral más el peso W0 propio de la barra. Este último es igual al peso específi co g del acero por el volumen V de la barra; o sea
W0 gV gAL (1.4)
en donde A es el área de la sección transversal de la barra. Por tanto, la fórmula para el esfuerzo máximo (de la ecuación 1.1) es
smáx
Fm
A
áx W
A
gAL W
AgL (1.5)
(b) Para calcular el esfuerzo máximo, sustituimos los valores numéricos en la ecuación anterior. El área de la sección anterior A es igual a πd2/4, donde d = 8 mm y el peso específi co g del acero es 77.0 kN/m3 (de la tabla H-1 del apéndice H). Por tanto,
smáx
p (81.
m5k
mN)2/4
(77.0 kN/m3)(40 m)
29.8 MPa 3.1 MPa 32.9 MPa
En este ejemplo, el peso de la barra contribuye de manera considerable al esfuerzo máximo y no debe ignorarse.
FIGURA 1.6 Ejemplo 1.2. Barra de acero soportando un peso W.
L
W
d

El diseño de máquinas y estructuras para que funcionen apropiadamente re-quiere que comprendamos el comportamiento mecánico de los materiales empleados. En general, la única forma para determinar cómo se comportan los materiales cuando se someten a cargas es realizar experimentos en el la-boratorio. El procedimiento usual es colocar muestras pequeñas del material en máquinas de ensayo, aplicar las cargas y luego medir las deformaciones resultantes (como cambios de longitud y diámetro). La mayor parte de los laboratorios de pruebas de materiales están equipados con máquinas capa-ces de cargar las muestras de diversas maneras, incluyendo cargas estáticas y dinámicas en tensión y compresión.
En la fi gura 1.7 se muestra una máquina para ensayos de tensión común. La muestra de ensayo se coloca entre las dos mordazas grandes de la máquina y luego se carga a tensión. Dispositivos de medición registran las deformaciones unitarias y los sistemas de control automático y de pro-cesamiento de datos (a la izquierda en la fotografía) tabulan y grafi can los resultados.
En la fi gura 1.8 se muestra una vista más detallada de una muestra para ensayo de tensión. Los extremos de la muestra circular se amplían en la región donde se colocan en las mordazas para que no ocurra la falla cerca de éstas. Una falla en los extremos no producirá la información deseada acerca del material, debido a que la distribución del esfuerzo cerca de las mordazas no es uniforme, como se explicó en la sección 1.2. En una muestra apropiadamente diseñada, la falla sucederá en su parte prismática donde la distribución del esfuerzo es uniforme y la barra está sometida sólo a tensión pura. Esta situación se muestra en la fi gura 1.8, donde la muestra de acero se fracturó ante la carga. El dispositivo a la derecha, que está conectado me-
1.3 PROPIEDADES MECÁNICAS DE LOS MATERIALES
FIGURA 1.7 Máquina para ensayos de tensión con sistema automático de procesamiento de datos. (Cortesía de MTS Systems Corporation.)
SECCIÓN 1.3 Propiedades mecánicas de los materiales 15

16 CAPÍTULO 1 Tensión, compresión y cortante
diante dos brazos a la muestra, es un extensómetro que mide el alargamiento durante la aplicación de la carga.
A fi n de que se puedan comparar los resultados de los ensayos, se de-ben estandarizar las dimensiones de las muestras para ensayo y los métodos de aplicación de las cargas. Una de las principales organizaciones norma-tivas en Estados Unidos es la American Society for Testing and Materials (ASTM), una sociedad técnica que publica especifi caciones y normas para materiales y pruebas. Otras organizaciones normativas son la American Standards and Association (ASA) y el National Institute of Standards and Technology (NIST). En otros países existen organizaciones similares.
La muestra para tensión estándar de la ASTM tiene un diámetro de 0.505 in y una longitud calibrada de 2.0 in entre las marcas de calibración, que son los puntos donde los brazos del extensómetro están conectados a la muestra (consulte la fi gura 1.8). Conforme se jala la muestra, se mide y se registra la carga axial, ya sea de forma automática o bien tomando una lec-tura de una carátula. El alargamiento sobre la longitud calibrada se mide de
FIGURA 1.8 Muestra común para ensayo de tensión con extensómetro conectado; la muestra se fracturó en tensión. (Cortesía de MTS Systems Corporation.)

manera simultánea, mediante dispositivos mecánicos del tipo que se mues-tra en la fi gura 1.8 o con deformímetros por resistencia eléctrica.
En un ensayo estático, la carga se aplica lentamente y la velocidad exacta de carga no es de interés debido a que no afecta el comportamiento de la muestra. Sin embargo, en un ensayo dinámico la carga se aplica rápidamen-te y en algunas ocasiones de una manera cíclica. Como la naturaleza de una carga dinámica afecta las propiedades de los materiales, también se de be medir la velocidad de carga.
Los ensayos de compresión de metales suelen realizarse en muestras pequeñas con forma de cubos o cilindros circulares. Por ejemplo, los cubos pueden tener 2.0 in por lado y los cilindros diámetros de 1 in, y longitudes de 1 a 12 in y se pueden medir la carga aplicada por la máquina y el acor-tamiento de la muestra. El acortamiento se debe medir sobre una longitud calibrada que sea menor que la longitud total de la muestra a fi n de eliminar efectos de borde.
El concreto se ensaya a la compresión en proyectos importantes de construcción para asegurar que se haya obtenido la resistencia requerida. Un tipo de muestra para ensayo de concreto tiene 6 in de diámetro, 12 in de longitud y una edad de 28 días (la edad del concreto es importante debido a que adquiere más resistencia a medida que se cura). Muestras similares pero un tanto menores se emplean cuando se realizan ensayos de compresión en roca (fi gura 1-9).
Diagramas de esfuerzo-deformación unitaria
Los resultados de los ensayos, en general, dependen de las dimensiones de la muestra que se ensaya. Como es poco probable que diseñemos una estruc-tura que tenga partes con el mismo tamaño que las muestras para ensayo, necesitamos expresar los resultados en una forma que se pueda aplicar a elementos de cualquier tamaño. Una forma simple de lograr este objetivo es convertir los resultados de los ensayos en esfuerzos y deformaciones unitarias.
El esfuerzo axial s en una muestra para ensayo se calcula dividiendo la carga axial P entre el área de la sección transversal A (ecuación 1.1). Cuando se utiliza el área inicial de la muestra en los cálculos, el esfuerzo se denomina esfuerzo nominal (otros nombres son esfuerzo convencional y esfuerzo ingenieril). Un valor más exacto del esfuerzo axial, denominado esfuerzo real, se puede calcular empleando el área real de la barra en la sección transversal donde ocurre la falla. Como el área real en un ensayo de tensión siempre es menor que el área inicial (como se ilustra en la fi gura 1.8), el esfuerzo real es mayor que el esfuerzo nominal.
La deformación unitaria axial promedio � en la muestra para ensayo se determina dividiendo el alargamiento medido d en medio de las marcas de calibración, entre la longitud calibrada L (consulte la fi gura 1.8 y la ecua-ción 1.2). Si la longitud calibrada inicial se emplea en el cálculo (por ejem-plo, 2.0 in), entonces se obtiene la deformación unitaria normal. Como la distancia entre las marcas de calibración aumenta conforme se aplica la carga de tensión, podemos calcular la deformación unitaria verdadera (o deformación unitaria natural) para cualquier valor de la carga empleando la distancia real entre las marcas de calibración. En tensión, la deformación
SECCIÓN 1.3 Propiedades mecánicas de los materiales 17
18 CAPÍTULO 1 Tensión, compresión y cortante
unitaria real siempre es menor que la deformación unitaria nominal. Sin embargo, para la mayor parte de los fi nes ingenieriles, el esfuerzo nominal y la deformación unitaria nominal son adecuadas, como se explica más ade-lante en esta sección.
Después de realizar un ensayo de tensión o compresión y de determinar el esfuerzo y la deformación unitaria para varias magnitudes de la carga, podemos trazar un diagrama del esfuerzo en función de la deformación uni-taria. Ese diagrama esfuerzo-deformación unitaria es una característica del material particular que se ensaya y contiene información importante sobre sus propiedades mecánicas y el tipo de comportamiento.*
FIGURA 1.8 Muestra de roca ensayada en compresión para obtener la resistencia a la compresión, el módulo elástico y la relación de Poisson. (Cortesía de MTS Systems Corporation).
*Los diagramas de esfuerzo-deformación unitaria fueron creados por Jacob Bernoulli (1654-1705) y J. V. Poncelet (1788-1867); consulte la referencia 1.4.
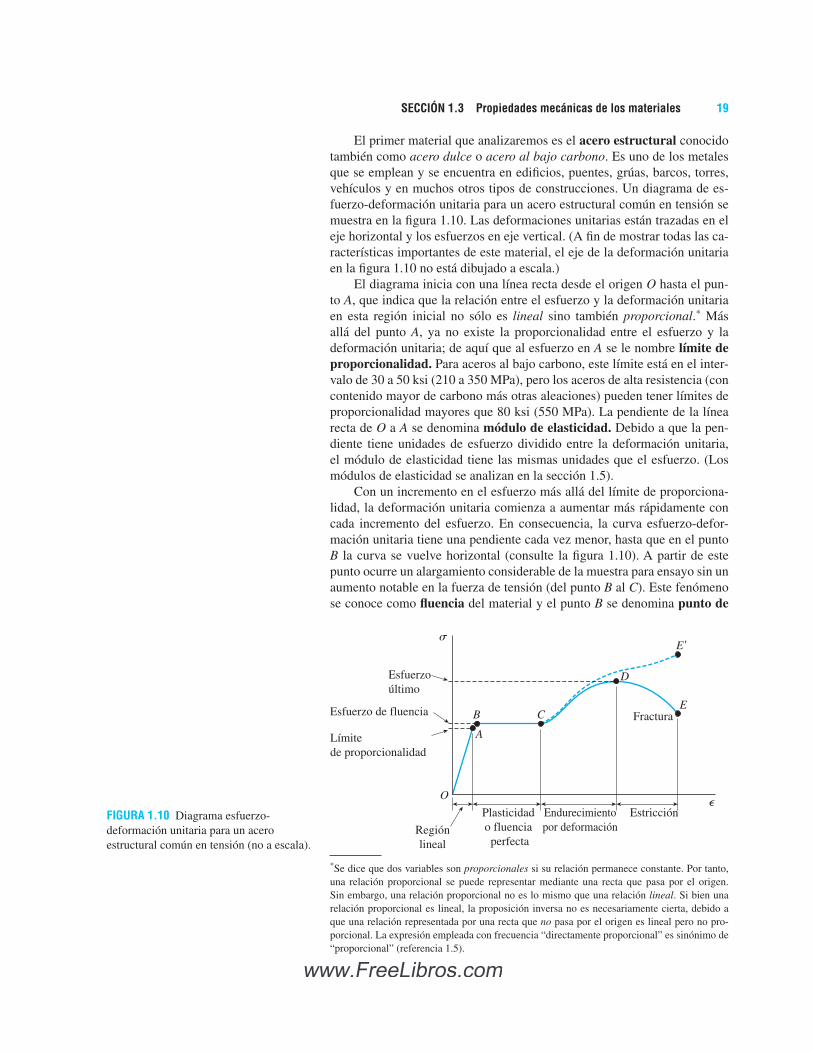
El primer material que analizaremos es el acero estructural conocido también como acero dulce o acero al bajo carbono. Es uno de los metales que se emplean y se encuentra en edifi cios, puentes, grúas, barcos, torres, vehículos y en muchos otros tipos de construcciones. Un diagrama de es-fuerzo-deformación unitaria para un acero estructural común en tensión se muestra en la fi gura 1.10. Las deformaciones unitarias están trazadas en el eje horizontal y los esfuerzos en eje vertical. (A fi n de mostrar todas las ca-racterísticas importantes de este material, el eje de la deformación unitaria en la fi gura 1.10 no está dibujado a escala.)
El diagrama inicia con una línea recta desde el origen O hasta el pun-to A, que indica que la relación entre el esfuerzo y la deformación unitaria en esta región inicial no sólo es lineal sino también proporcional.* Más allá del punto A, ya no existe la proporcionalidad entre el esfuerzo y la deformación unitaria; de aquí que al esfuerzo en A se le nombre límite de proporcionalidad. Para aceros al bajo carbono, este límite está en el inter-valo de 30 a 50 ksi (210 a 350 MPa), pero los aceros de alta resistencia (con contenido mayor de carbono más otras aleaciones) pueden tener límites de proporcionalidad mayores que 80 ksi (550 MPa). La pendiente de la línea recta de O a A se denomina módulo de elasticidad. Debido a que la pen-diente tiene unidades de esfuerzo dividido entre la deformación unitaria, el módulo de elasticidad tiene las mismas unidades que el esfuerzo. (Los módulos de elasticidad se analizan en la sección 1.5).
Con un incremento en el esfuerzo más allá del límite de proporciona-lidad, la deformación unitaria comienza a aumentar más rápidamente con cada incremento del esfuerzo. En consecuencia, la curva esfuerzo-defor-mación unitaria tiene una pendiente cada vez menor, hasta que en el punto B la curva se vuelve horizontal (consulte la fi gura 1.10). A partir de este punto ocurre un alargamiento considerable de la muestra para ensayo sin un aumento notable en la fuerza de tensión (del punto B al C). Este fenómeno se conoce como fl uencia del material y el punto B se denomina punto de
FIGURA 1.10 Diagrama esfuerzo-deformación unitaria para un acero estructural común en tensión (no a escala).
*Se dice que dos variables son proporcionales si su relación permanece constante. Por tanto, una relación proporcional se puede representar mediante una recta que pasa por el origen. Sin embargo, una relación proporcional no es lo mismo que una relación lineal. Si bien una relación proporcional es lineal, la proposición inversa no es necesariamente cierta, debido a que una relación representada por una recta que no pasa por el origen es lineal pero no pro-porcional. La expresión empleada con frecuencia “directamente proporcional” es sinónimo de “proporcional” (referencia 1.5).
SECCIÓN 1.3 Propiedades mecánicas de los materiales 19
Fractura
Regiónlineal
Plasticidad o fluencia
perfecta
Endurecimientopor deformación
Estricción
A
O
B C
D
E
E'
Límite de proporcionalidad
Esfuerzo de fluencia
Esfuerzo último
e
s
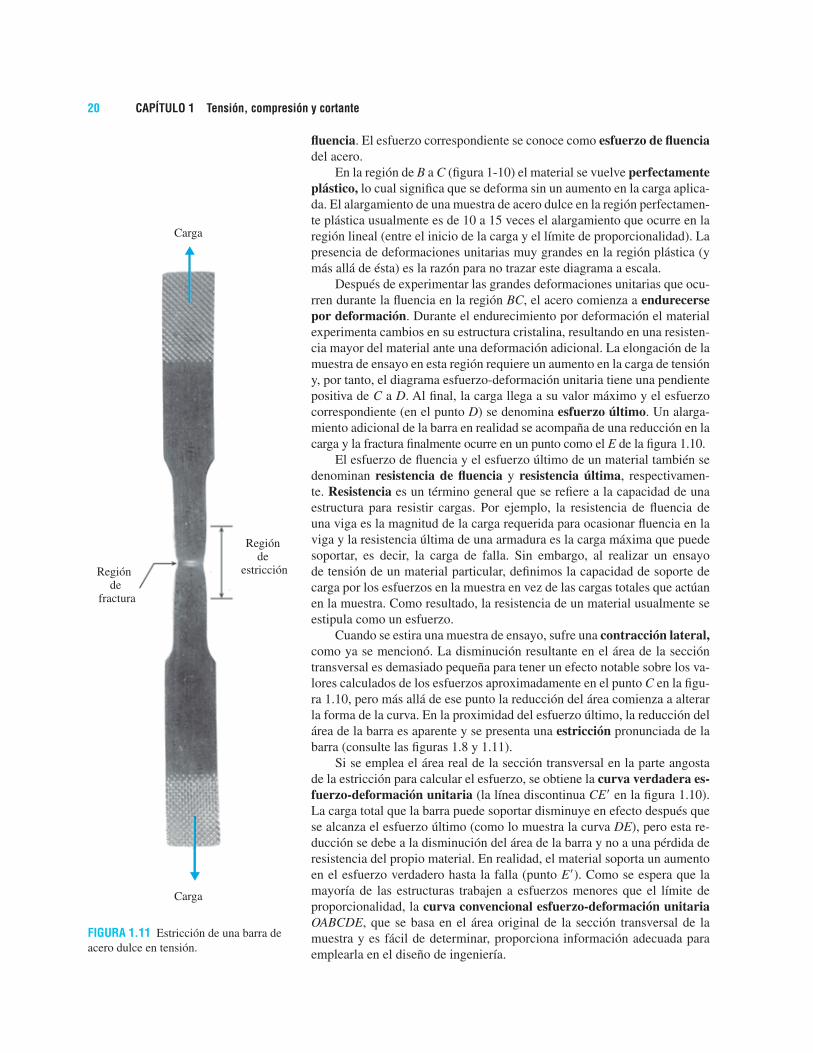
20 CAPÍTULO 1 Tensión, compresión y cortante
Región de
fractura
Región de
estricción
Carga
Carga
fl uencia. El esfuerzo correspondiente se conoce como esfuerzo de fl uencia del acero.
En la región de B a C (fi gura 1-10) el material se vuelve perfectamente plástico, lo cual signifi ca que se deforma sin un aumento en la carga aplica-da. El alargamiento de una muestra de acero dulce en la región perfectamen-te plástica usualmente es de 10 a 15 veces el alargamiento que ocurre en la región lineal (entre el inicio de la carga y el límite de proporcionalidad). La presencia de deformaciones unitarias muy grandes en la región plástica (y más allá de ésta) es la razón para no trazar este diagrama a escala.
Después de experimentar las grandes deformaciones unitarias que ocu-rren durante la fl uencia en la región BC, el acero comienza a endurecerse por deformación. Durante el endurecimiento por deformación el material experimenta cambios en su estructura cristalina, resultando en una resisten-cia mayor del material ante una deformación adicional. La elongación de la muestra de ensayo en esta región requiere un aumento en la carga de tensión y, por tanto, el diagrama esfuerzo-deformación unitaria tiene una pendiente positiva de C a D. Al fi nal, la carga llega a su valor máximo y el esfuerzo correspondiente (en el punto D) se denomina esfuerzo último. Un alarga-miento adicional de la barra en realidad se acompaña de una reducción en la carga y la fractura fi nalmente ocurre en un punto como el E de la fi gura 1.10.
El esfuerzo de fl uencia y el esfuerzo último de un material también se denominan resistencia de fl uencia y resistencia última, respectivamen-te. Resistencia es un término general que se refi ere a la capacidad de una estructura para resistir cargas. Por ejemplo, la resistencia de fl uencia de una viga es la magnitud de la carga requerida para ocasionar fl uencia en la viga y la resistencia última de una armadura es la carga máxima que puede soportar, es decir, la carga de falla. Sin embargo, al realizar un ensayo de tensión de un material particular, defi nimos la capacidad de soporte de carga por los esfuerzos en la muestra en vez de las cargas totales que actúan en la muestra. Como resultado, la resistencia de un material usualmente se estipula como un esfuerzo.
Cuando se estira una muestra de ensayo, sufre una contracción lateral, como ya se mencionó. La disminución resultante en el área de la sección transversal es demasiado pequeña para tener un efecto notable sobre los va-lores calculados de los esfuerzos aproximadamente en el punto C en la fi gu-ra 1.10, pero más allá de ese punto la reducción del área comienza a alterar la forma de la curva. En la proximidad del esfuerzo último, la reducción del área de la barra es aparente y se presenta una estricción pronunciada de la barra (consulte las fi guras 1.8 y 1.11).
Si se emplea el área real de la sección transversal en la parte angosta de la estricción para calcular el esfuerzo, se obtiene la curva verdadera es-fuerzo-deformación unitaria (la línea discontinua CE� en la fi gura 1.10). La carga total que la barra puede soportar disminuye en efecto después que se alcanza el esfuerzo último (como lo muestra la curva DE), pero esta re-ducción se debe a la disminución del área de la barra y no a una pérdida de resistencia del propio material. En realidad, el material soporta un aumento en el esfuerzo verdadero hasta la falla (punto E�). Como se espera que la mayoría de las estructuras trabajen a esfuerzos menores que el límite de proporcionalidad, la curva convencional esfuerzo-deformación unitaria OABCDE, que se basa en el área original de la sección transversal de la muestra y es fácil de determinar, proporciona información adecuada para emplearla en el diseño de ingeniería.
FIGURA 1.11 Estricción de una barra de acero dulce en tensión.

El diagrama de la fi gura 1.10 muestra las características generales de la curva esfuerzo-deformación unitaria para el acero dulce, pero sus propor-ciones no son realistas debido a, como ya se mencionó, que la deformación unitaria que ocurre de B a C puede ser más de diez veces mayor que la defor-mación unitaria que ocurre de O a A. Además, las deformaciones unitarias de C a E son muchas veces mayores que las de B a C. Las relaciones correctas se representan en la fi gura 1.12, donde se muestra un diagrama esfuerzo-deforma-ción unitaria para acero dulce dibujado a escala. En esta fi gura, las defor-maciones unitarias desde el punto cero hasta el punto A son tan pequeñas comparadas con las deformaciones unitarias del punto A al punto E que no se pueden ver y parece que la parte inicial del diagrama es una línea vertical.
La presencia de un punto de fl uencia bien defi nido, seguido por deforma-ciones unitarias plásticas grandes, es una característica importante del acero estructural que algunas veces se emplea en el diseño práctico (consulte, por ejemplo, los análisis del comportamiento elastoplástico en las secciones 2.12 y 6.10). Los metales como el acero estructural que sufren deformaciones uni-tarias permanentes antes de la falla se clasifi can como dúctiles. Por ejemplo, la ductilidad es la propiedad que permite que una barra de acero se doble para formar un arco circular o se trefi le para formar un alambre sin romperse. Una característica importante de los materiales dúctiles es que presentan una dis-torsión visible si las cargas son demasiado grandes, proporcionando así una oportunidad para tomar una acción correctiva antes de que ocurra la fractura. También, los materiales que presentan comportamiento dúctil son capaces de absorber grandes cantidades de energía de deformación antes de la fractura.
El acero estructural es una aleación de hierro que contiene aproximada-mente 0.2 por ciento de carbono y, por tanto, se clasifi ca como acero al bajo carbono. Al aumentar el contenido de carbono, el acero se vuelve menos dúctil pero más resistente (mayor esfuerzo de fl uencia y mayor esfuerzo último). Las propiedades físicas del acero también se ven afectadas por un tratamiento térmico, por la presencia de otros metales y por los procesos de manufactura como el laminado. Otros materiales que se comportan de una manera dúctil (en ciertas condiciones) son aluminio, cobre, magnesio, plo-mo, molibdeno, níquel, latón, bronce, metal monel, nailon y tefl ón.
Las aleaciones de aluminio si bien pueden tener una ductilidad con-siderable, no tienen un punto de fl uencia bien defi nido, como se muestra en el diagrama esfuerzo-deformación unitaria de la fi gura 1.13, pero tienen una región lineal inicial con un límite de proporcionalidad reconocible. Las aleaciones producidas para fi nes estructurales tienen límites de proporcio-nalidad en el rango de 10 a 60 ksi (70 a 410 MPa) y esfuerzos últimos en el rango de 20 a 80 ksi (140 a 550 MPa).
Cuando un material, como el aluminio, no tiene un punto de fl uencia bien determinado y, sin embargo, sufre grandes deformaciones unitarias después de rebasar el límite de proporcionalidad, se puede determinar un esfuerzo de fl uencia arbitrario mediante el método de desplazamiento. Se traza una línea recta en el diagrama esfuerzo-deformación unitaria paralela a la parte inicial lineal de la curva (fi gura 1.14), pero desplazada en cierta deformación unitaria estándar, como 0.002 (o 0.2 por ciento). La intersec-ción de la línea desplazada y la curva esfuerzo-deformación unitaria (punto A en la fi gura) defi ne el esfuerzo de fl uencia. Como este esfuerzo se deter-mina mediante una regla arbitraria y no es una propiedad física inherente del material, se debe distinguir de un esfuerzo verdadero de fl uencia y re-ferirse a él como esfuerzo de fl uencia desplazado. Para un material como
FIGURA 1.12 Diagrama esfuerzo-deformación unitaria para un acero estructural típico en tensión (dibujado a escala).
FIGURA 1.13 Diagrama esfuerzo-deformación unitaria típico para una aleación de aluminio.
FIGURA 1.14 Esfuerzo de fl uencia arbitrario determinado mediante el método de desplazamiento.
SECCIÓN 1.3 Propiedades mecánicas de los materiales 21
A
O
0.002 Desplazamiento
s
e
(ksi)
00
40
30
20
10
0.05 0.15 0.250.10 0.20
s
e
E
(ksi)
D
C
A, B
00
80
60
40
20
0.05 0.15 0.250.10 0.300.20
s
e

22 CAPÍTULO 1 Tensión, compresión y cortante
el aluminio, el esfuerzo de fl uencia desplazado está ligeramente arriba del límite de proporcionalidad. En el caso del acero estructural, con su abrupta transición de la región lineal a la región de alargamiento plástico, el esfuer-zo desplazado es en esencia el mismo tanto en el esfuerzo de fl uencia como en el límite de proporcionalidad.
El caucho mantiene una relación lineal entre el esfuerzo y la deforma-ción unitaria hasta llegar a deformaciones unitarias relativamente grandes (en comparación con los metales). La deformación unitaria en el límite de proporcionalidad puede ser tan alta como 0.1 o 0.2 (10 o 20 por ciento). Más allá del límite de proporcionalidad, el comportamiento depende del tipo de caucho (fi gura 1.15). Algunas clases de caucho suave se estirarán enormemente sin fallar, alcanzando longitudes de varias veces sus longitu-des originales. El material termina presentando cada vez mayor resistencia a la carga y la curva esfuerzo-deformación unitaria se curva marcadamente hacia arriba. Este comportamiento característico se puede percibir estirando una banda de caucho con las manos. (Observe que aunque el caucho pre-senta deformaciones unitarias muy grandes, no es un material dúctil debido a que las deformaciones no son permanentes. Es, por supuesto, un material elástico; consulte la sección 1.4.)
La ductilidad de un material en tensión se puede caracterizar por su alargamiento y por la reducción de su área en la sección transversal donde ocurre la fractura. El porcentaje de alargamiento se defi ne como sigue:
L1
L0
L0(100)Porcentaje de alargamiento (1.6)
en donde L0 es la longitud calibrada original y L1 es la distancia entre las marcas de calibración en la fractura. Ya que el alargamiento no es uniforme en toda la longitud de la muestra, sino que se concentra en la región de es-tricción, el porcentaje de alargamiento depende de la longitud calibrada. Por tanto, al dar el porcentaje de alargamiento, siempre se debe proporcionar la longitud calibrada. Para una longitud calibrada de 2 in, el acero puede tener un alargamiento en el rango de 3 a 40%, dependiendo de su composición; en el caso del acero estructural, son comunes valores de 20 o 30 por ciento. El alargamiento de las aleaciones de aluminio varía de 1 a 45 por ciento, dependiendo de su composición y su tratamiento.
El porcentaje de reducción de área mide la cantidad de estricción que ocurre y se defi ne como sigue:
A0
A0
A1(100)Porcentaje de reducción de área (1.7)
en donde A0 es el área transversal original y A1 es el área fi nal en la sección de fractura. Para aceros dúctiles, la reducción es casi de 50 por ciento.
Los materiales que fallan en tensión a valores relativamente bajos de deformación unitaria se clasifi can como frágiles. Algunos ejemplos son concreto, piedra, hierro colado, vidrio, cerámica y una variedad de aleacio-nes metálicas. Los materiales frágiles fallan con poco alargamiento después que se sobrepasa el límite de proporcionalidad (el esfuerzo en el punto A en la fi gura 1.16). Además, la reducción del área es insignifi cante y por tanto el esfuerzo nominal de fractura (punto B) es el mismo que el esfuerzo último verdadero. Los aceros al alto carbono tienen esfuerzos de fl uencia muy ele-vados —más de 100 ksi (700 MPa) en algunos casos— pero se comportan
FIGURA 1.15 Curvas esfuerzo-deformación unitaria para dos clases de caucho en tensión.
FIGURA 1.16 Diagrama típico de esfuerzo-deformación unitaria para un material frágil, que muestra el límite de proporcionalidad (punto A) y el punto de fractura (punto B).
(psi)
00
3000
2000
1000
2 64 8
Caucho duro
Caucho suave
s
e
A
O
Bs
e

de una manera frágil y la fractura ocurre con un alargamiento de tan sólo un porcentaje bajo.
El vidrio ordinario es un material frágil casi ideal, debido a que casi no presenta ductilidad. La curva esfuerzo-deformación unitaria del vidrio en tensión es en esencia una línea recta y la falla sucede antes de que tenga lu-gar alguna fl uencia. El esfuerzo último es de casi 10 000 psi (70 MPa) para ciertas clases de vidrio en placa, pero hay grandes variaciones, dependiendo del tipo de vidrio, del tamaño de la muestra y de la presencia de defectos mi-croscópicos. Las fi bras de vidrio pueden desarrollar resistencias enormes y se han alcanzado esfuerzos últimos mayores que 1 000 000 psi (7 GPa).
Muchos tipos de plásticos se utilizan para fi nes estructurales debido a su peso ligero, a su resistencia a la corrosión y a sus buenas propiedades de aislamiento eléctrico. Sus propiedades mecánicas varían enormemente, tal que algunos plásticos son frágiles y otros dúctiles. Al diseñar con plásticos es importante tomar en cuenta que sus propiedades se afectan en gran medi-da por los cambios de temperatura y por el tiempo. Por ejemplo, el esfuerzo último de tensión de algunos plásticos disminuye a la mitad solamente ele-vando la temperatura de 10 a 40°C. Además, un plástico cargado se puede estirar gradualmente al paso del tiempo hasta que pierde su capacidad de servicio. Por ejemplo, una barra de cloruro de polivinilo sometida a una car-ga de tensión que inicialmente produce una deformación unitaria de 0.005 puede tener el doble de esa deformación después de una semana, aunque la carga permanezca constante. (Este fenómeno, conocido como termofl uen-cia, se explica en la siguiente sección.)
Los esfuerzos últimos de tensión para plásticos usualmente se encuen-tran en el rango de 2 a 50 ksi (14 a 350 MPa) y sus pesos específi cos varían entre 50 a 90 lb/ft3 (8 a 14 kN/m3). Un tipo de nailon tiene un esfuerzo úl-timo de 12 ksi (80 MPa) y un peso específi co de sólo 70 lb/ft3 (11 kN/m3), que es sólo 12 por ciento más pesado que el agua. Debido a su peso ligero, la razón entre resistencia y peso para el nailon es casi la misma que para el acero estructural (consulte el problema 1.3-4).
Un material reforzado con fi lamentos, consiste en una base (o matriz) en la que están embebidos fi lamentos, fi bras o microfi bras de alta resistencia. El material compuesto resultante tiene una resistencia mucho mayor que el material base. Como ejemplo, el uso de fi bras de vidrio puede aumentar a más del doble la resistencia de una matriz plástica. Los compuestos se em-plean ampliamente en aviones, botes, cohetes y vehículos espaciales donde se requiere alta resistencia y peso ligero.
Compresión
Las curvas esfuerzo-deformación unitaria para materiales en compresión difi eren de las curvas de tensión. Los metales dúctiles como el acero, el aluminio y el cobre tienen límites de proporcionalidad en compresión muy cercanos a los de tensión y las regiones iniciales de sus diagramas esfuerzo-defor mación unitaria en compresión y tensión son casi iguales. Sin embar-go, después que inicia la fl uencia, el comportamiento es muy diferente. En un ensayo de tensión, la muestra se estira, puede ocurrir estricción y fi nal-mente sucede la fractura. Cuando el material se comprime, se abulta hacia fuera en los lados y adopta una forma como de barril, debido a que la fricción entre la muestra y las placas extremas evita la expansión lateral. Al aumentar la carga, la muestra se aplana y presenta una resistencia mucho mayor a un
SECCIÓN 1.3 Propiedades mecánicas de los materiales 23

24 CAPÍTULO 1 Tensión, compresión y cortante
acortamiento adicional (lo que signifi ca que la curva esfuerzo-deformación unitaria se vuelve muy empinada). Esas características se ilustran en la fi -gura 1.17, donde se muestra un diagrama esfuerzo-deformación unitaria en compresión para el cobre. Como el área de la sección transversal real de una muestra ensayada en compresión es mayor que el área inicial, el esfuerzo verdadero es un ensayo de compresión es menor que el esfuerzo nominal.
Los materiales frágiles cargados en compresión usualmente tienen una región lineal inicial seguida de una región en la que el acortamiento aumen-ta a una velocidad ligeramente mayor que la carga. Las curvas esfuerzo-de-formación unitaria para compresión y tensión con frecuencia tienen formas similares, pero los esfuerzos últimos en compresión son mucho mayores que los de tensión. Además, a diferencia de los materiales dúctiles, que se aplanan cuando se comprimen, los materiales frágiles en realidad se fractu-ran con la carga máxima.
Tablas de propiedades mecánicas
Las propiedades de los materiales se listan en las tablas del apéndice H al fi nal del libro. Los datos de materiales en las tablas son los típicos y ade-cuados para resolver problemas en este libro. Sin embargo, las propiedades de los materiales y las curvas esfuerzo-deformación unitaria varían en gran medida, incluso para el mismo material, debido a los diferentes procesos de manufactura, a la composición química, a defectos internos, a la temperatu-ra y a muchos otros factores.
Por estas razones, los datos obtenidos del apéndice H (o de otras tablas de naturaleza similar) no se deben emplear para fi nes específi cos de inge-niería o diseño. En cambio, se debe consultar los fabricantes o proveedores de materiales para obtener información sobre un producto particular.
FIGURA 1.17 Diagrama esfuerzo-deformación unitaria para el cobre en compresión.
1.4 ELASTICIDAD, PLASTICIDAD Y TERMOFLUENCIA
Los diagramas de esfuerzo-deformación unitaria presentan el comportamien-to de los materiales ingenieriles cuando están cargados en tensión o com-presión, como se describió en la sección anterior. Para ir un paso más allá, consideremos que sucede cuando la carga se quita y el material se descarga.
Suponga por ejemplo, que aplicamos una carga de tensión a una mues-tra tal que el esfuerzo y la deformación unitaria vayan del origen O al punto A en la curva de esfuerzo-deformación unitaria de la fi gura 1.18a. Suponga además que cuando la carga se remueve, el material sigue exactamente la misma curva de regreso al origen O. Esta propiedad de un material, me-diante la cual regresa a sus dimensiones originales durante la descarga, se denomina elasticidad y se dice que el propio material es elástico. Observe que la curva esfuerzo-deformación unitaria de O a A no tiene que ser lineal a fi n de que el material sea elástico.
Ahora suponga que cargamos este mismo material hasta un nivel mayor, tal que se alcanza el punto B en la curva esfuerzo-deformación unitaria (fi gura 1.18b). Cuando la descarga sucede a partir del punto B, el material sigue la línea BC en el diagrama. Esta línea de descarga es paralela a la parte inicial de la curva de carga; es decir, la línea BC es paralela a una tangente a la curva esfuerzo-deformación unitaria en el origen. Cuando se alcanza el punto C, la carga se ha removido por completo, pero en el material permanece una defor-mación unitaria residual o deformación unitaria permanente, representada
(ksi)
00
80
40
60
20
0.2 0.60.4 0.8
s
e

por la línea OC. Como consecuencia, la barra ensayada es más larga ahora que antes de la aplicación de la carga. Este alargamiento residual de la barra se denomina deformación permanente. De la deformación total OD desarro-llada durante la carga de O a B, la deformación unitaria CD se ha recuperado elásticamente y la deformación unitaria OC permanece como una deformación unitaria permanente. Así, durante la descarga la barra regresa parcialmente a su forma original y, por tanto, se dice que el material es parcialmente elástico.
Entre los puntos A y B en la curva esfuerzo-deformación unitaria (fi -gura 1.18b), debe haber un punto antes del cual el material es elástico y después del cual el material es parcialmente elástico. Para encontrar este punto, cargamos el material hasta un valor seleccionado de esfuerzo y luego removemos la carga. Si no hay una deformación unitaria permanente (es decir, si el alargamiento de la barra regresa a cero), entonces el material es completamente elástico hasta el valor seleccionado del esfuerzo.
El proceso de carga y descarga se puede repetir para valores sucesiva-mente mayores del esfuerzo. Al fi nal se alcanzará un esfuerzo tal que no toda la deformación unitaria se recupera durante la descarga. Mediante este procedimiento es posible determinar el esfuerzo en el límite superior de la región elástica, por ejemplo, el esfuerzo en el punto E en las fi guras 1.18a y b. El esfuerzo en este punto se conoce como límite elástico del material.
Muchos materiales, incluyendo la mayor parte de los metales, tienen regiones lineales al inicio de sus curvas esfuerzo-deformación unitaria (por ejemplo, consulte las fi guras 1.10 y 1.13). El esfuerzo en el límite superior de esta región lineal es el límite de proporcionalidad, como se explicó en la sec-ción anterior. El límite elástico usualmente es igual o ligeramente mayor que el límite de proporcionalidad. De aquí que, para muchos materiales, a los dos límites se les asigne el mismo valor numérico. En el caso del acero dulce, el es-fuerzo de fl uencia también está muy cercano al límite de proporcionalidad, tal que para fi nes prácticos el esfuerzo de fl uencia, el límite elástico y el límite de proporcionalidad se suponen iguales. Por supuesto, esta situación no es válida para todos los materiales. El caucho es un notable ejemplo de un material que es elástico mucho más allá de su límite de proporcionalidad.
La característica de un material por la cual experimenta deformaciones unitarias inelásticas, más allá de la deformación unitaria en el límite elástico, se conoce como plasticidad. Por tanto, en la curva esfuerzo-deformación unitaria de la fi gura 1.18a tenemos una región elástica seguida de una región plástica. Cuando suceden deformaciones unitarias grandes en un material dúctil carga-do en la región plástica, se dice que el material experimenta fl ujo plástico.
Carga repetida de un material
Si el material permanece dentro del rango elástico, se puede cargar, descar-gar y cargar de nuevo sin cambiar signifi cativamente su comportamiento. Sin embargo, cuando está cargado en el rango plástico, la estructura interna del material se altera y cambian sus propiedades. Por ejemplo, ya hemos ob-servado que se da una deformación unitaria permanente en la muestra des-pués de la descarga desde la región plástica (fi gura 1.18b). Ahora suponga que el material se recarga después de esa descarga (fi gura 1.19). La nueva carga inicia en el punto C en el diagrama y continúa hacia arriba hasta el punto B, el punto en el cual comenzó la descarga durante el primer ciclo de carga. Entonces el material sigue la curva original de esfuerzo-deformación unitaria hacia el punto F. Así, para la segunda carga, podemos imaginar que
FIGURA 1.18 Diagramas esfuerzo-deformación unitaria que ilustran (a) un comportamiento elástico y (b) un comportamiento parcialmente elástico.
SECCIÓN 1.4 Elasticidad, plasticidad y termofl uencia 25
A
O
EF
(a)
Carg
a
Desca
rga
Elástico Plástico
A
O
EFB
C D
(b)
Carga
Des
carg
a
s
e
s
eDeforma-
ción unitaria residual
Recupe-ración elástica

26 CAPÍTULO 1 Tensión, compresión y cortante
tenemos un diagrama nuevo de esfuerzo-deformación unitaria con su origen en el punto C.
Durante la segunda carga el material se comporta de una manera lineal-mente elástica de C a B, donde la pendiente de la recta CB es igual que la pendiente de la tangente a la curva original de carga, en el origen O. Ahora el límite de proporcionalidad está en el punto B, el cual está mayor esfuerzo que el límite elástico original (punto E). Así, al estirar un material como el acero o el aluminio en el rango inelástico o plástico, cambian las propiedades del ma-terial —aumenta la región linealmente elástica, aumenta el límite de propor-cionalidad y aumenta también el límite elástico—. Sin embargo, la ductilidad se reduce debido a que en el “nuevo material” la cantidad de fl uencia más allá del límite elástico (de B a F) es menor que en el material original (de E a F).*
Termofl uencia
Los diagramas de esfuerzo-deformación unitaria descritos antes se obtuvie-ron a partir de ensayos de tensión en los que se aplicaba carga y descarga estática a las muestras y el paso del tiempo no entró en nuestros análisis. No obstante, cuando los materiales se cargan durante periodos largos, algunos de ellos desarrollan deformaciones unitarias adicionales y se dice que pre-sentan termofl uencia.
Este fenómeno se manifi esta de diversas maneras. Por ejemplo, supon-ga que una barra vertical (fi gura 1.20a) se carga lentamente mediante una fuerza P, produciendo un alargamiento igual a d0. Supongamos que la car-ga y el alargamiento correspondiente tiene lugar durante un intervalo que dura t0 (fi gura 1.20b). Después del tiempo t0, la carga permanece constante. Sin embargo, debido a la termofl uencia, la barra puede alargarse en forma gradual, como se muestra en la fi gura 1.20b, aunque la carga no cambie. Este comportamiento sucede en muchos materiales, aunque algunas veces el cambio es demasiado pequeño para considerarlo.
Como otra manifestación de termofl uencia, considere un alambre que se estira entre dos soportes inmóviles, de manera tal que tiene un esfuerzo de tensión inicial s0 (fi gura 1.21). Una vez más, denotaremos el tiempo durante el cual el alambre se alarga inicialmente como t0. Con el paso del tiempo el esfuerzo en el alambre disminuye de manera gradual y termina alcanzando un valor constante, aun cuando los soportes en los extremos del alambre no se muevan. Este proceso se denomina relajación del material.
En general, la termofl uencia es más importante a temperaturas eleva-das que a temperaturas ordinarias y, por lo tanto, siempre se debe tomar en cuenta en el diseño de motores, chimeneas y otras estructuras que operan a temperaturas elevadas durante grandes periodos. Sin embargo, materiales como el acero, el concreto y la madera tendrán una termofl uencia ligera aun a temperaturas ambiente. Por ejemplo, la termofl uencia del concreto en el trascurso de grandes periodos puede crear ondulaciones en las calzadas de puentes debido a la fl exión entre los apoyos. (Una solución es construir la calzada con una contrafl echa, que es un desplazamiento inicial arriba de la horizontal, de modo que cuando ocurra la termofl uencia, los tramos del puente bajen hasta su posición a nivel.)
*El estudio del comportamiento de materiales expuestos a diversas condiciones ambientales y sometidos a varias cargas es una rama importante de la mecánica aplicada. Para obtener información ingenieril más detallada sobre materiales, consulte un libro de texto enfocado en este tema.
FIGURA 1.19 Carga repetida de un material y elevación de los límites elástico y de proporcionalidad.
FIGURA 1.21 Relajación del esfuerzo en un alambre sometido a una deformación unitaria constante.
O
EFB
C
Carga
Des
carg
a
Car
ga r
epet
ida
s
e
FIGURA 1.20 Termofl uencia en una barra sometida a una carga constante.
(b)
Alargamiento
Tiempo
O
0
t0P
(a)
d
O
(b)
(a)
Esfuerzo
Tiempo
0
t0
Alambre
s

Muchos materiales estructurales, incluyendo la mayor parte de los meta-les, madera, plásticos y cerámicos, se comportan tanto de manera elástica como lineal cuando se cargan por primera vez. En consecuencia, sus curvas esfuerzo-deformación unitaria inician con una línea que pasa por el ori-gen. Un ejemplo es la curva esfuerzo-deformación unitaria para el acero estructural (fi gura 1.10), donde la región desde el origen O hasta el límite de proporcionalidad (punto A) es tanto lineal como elástica. Otros ejemplos son las regiones bajo los límites tanto de proporcionalidad como de elastici-dad en los diagramas para el aluminio (fi gura 1.13), los materiales frágiles (fi gura 1.16) y el cobre (fi gura 1.17).
Cuando un material se comporta elásticamente y también presenta una relación lineal entre el esfuerzo y la deformación unitaria se dice que es linealmente elástico. Este tipo de comportamiento es muy importante en ingeniería por una razón obvia: al diseñar estructuras y máquinas para que trabajen en esta región, evitamos deformaciones permanentes debidas a la fl uencia plástica.
Ley de Hooke
La relación lineal entre el esfuerzo y la deformación unitaria para una barra en tensión o compresión simple se expresa por la ecuación
s Ee (1.8)
en donde s es el esfuerzo axial, � es la deformación unitaria axial y E es una constante de proporcionalidad conocida como módulo de elasticidad del material. El módulo de elasticidad es la pendiente del diagrama esfuerzo-deformación unitaria en la región linealmente elástica, como mencionamos en la sección 1.3. Como la deformación unitaria es adimensional, las unida-des de E son las mismas que las del esfuerzo. Las unidades típicas de E son psi o ksi en unidades inglesas y pascales (o sus múltiplos) en unidades SI.
La ecuación s = Ee se conoce como ley de Hooke, nombrada en ho-nor del famoso científi co inglés Robert Hooke (1635-1703), quien fue la primera persona que investigó científi camente las propiedades elásticas de los materiales y probó varios de ellos como metal, madera, piedra, hueso y tendones. Hooke midió el alargamiento de alambres largos que soportaban pesos y observó que los estiramientos “siempre mantienen las mismas pro-porciones entre sí de acuerdo con los pesos que los causaron” (referencia 1.6). Así, Hooke estableció la relación lineal entre las cargas aplicadas y los alargamientos resultantes.
La ecuación (1.8) en realidad es una versión muy limitada de la ley de Hooke debido a que sólo se relaciona con los esfuerzos longitudinales y las deformaciones unitarias desarrolladas en tensión o compresión simple de la barra (esfuerzo uniaxial). Para tratar con estados más complicados de es-fuerzos, como los encontrados en la mayoría de las estructuras y máquinas, debemos emplear ecuaciones más completas de la ley de Hooke (consulte las secciones 7.5 y 7.6).
El módulo de elasticidad tiene valores relativamente grandes para ma-teriales que son muy rígidos, como los metales estructurales. El acero tiene
1.5 ELASTICIDAD LINEAL, LEY DE HOOKE Y RELACIÓN DE POISSON
SECCIÓN 1.5 Elasticidad lineal, ley de Hooke y relación de Poisson 27
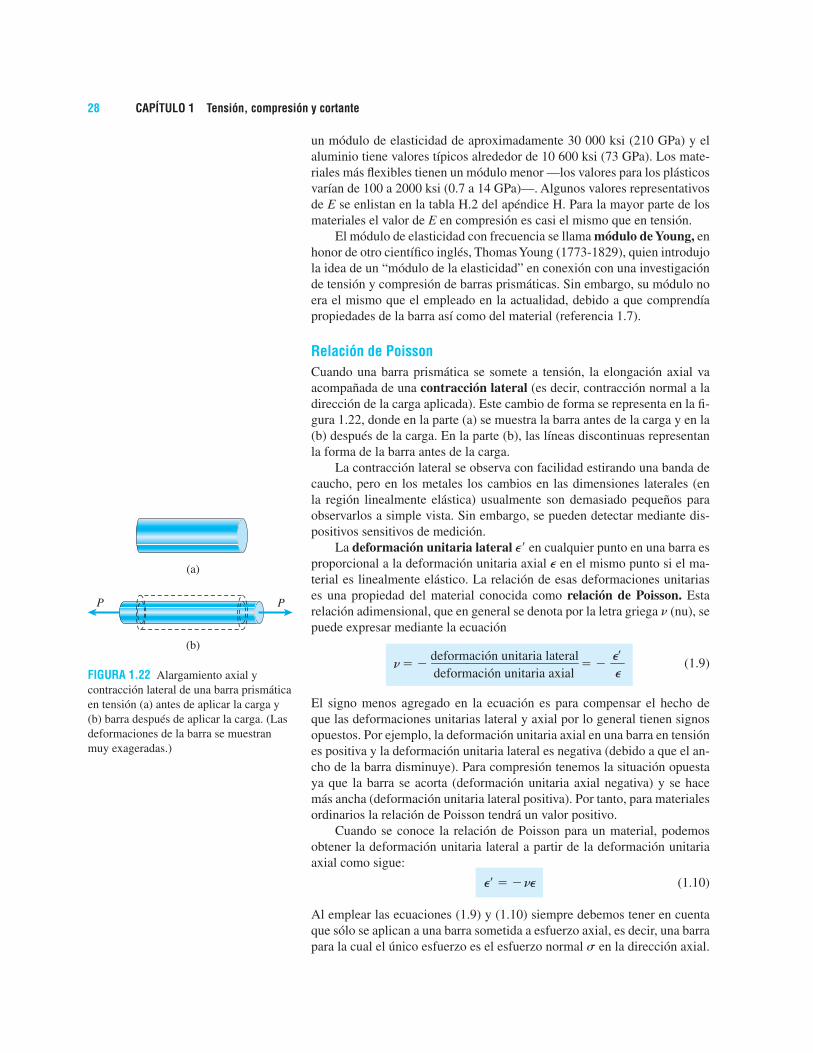
28 CAPÍTULO 1 Tensión, compresión y cortante
un módulo de elasticidad de aproximadamente 30 000 ksi (210 GPa) y el aluminio tiene valores típicos alrededor de 10 600 ksi (73 GPa). Los mate-riales más fl exibles tienen un módulo menor —los valores para los plásticos varían de 100 a 2000 ksi (0.7 a 14 GPa)—. Algunos valores representativos de E se enlistan en la tabla H.2 del apéndice H. Para la mayor parte de los materiales el valor de E en compresión es casi el mismo que en tensión.
El módulo de elasticidad con frecuencia se llama módulo de Young, en honor de otro científi co inglés, Thomas Young (1773-1829), quien introdujo la idea de un “módulo de la elasticidad” en conexión con una investigación de tensión y compresión de barras prismáticas. Sin embargo, su módulo no era el mismo que el empleado en la actualidad, debido a que comprendía propiedades de la barra así como del material (referencia 1.7).
Relación de Poisson
Cuando una barra prismática se somete a tensión, la elongación axial va acompañada de una contracción lateral (es decir, contracción normal a la dirección de la carga aplicada). Este cambio de forma se representa en la fi -gura 1.22, donde en la parte (a) se muestra la barra antes de la carga y en la (b) después de la carga. En la parte (b), las líneas discontinuas representan la forma de la barra antes de la carga.
La contracción lateral se observa con facilidad estirando una banda de caucho, pero en los metales los cambios en las dimensiones laterales (en la región linealmente elástica) usualmente son demasiado pequeños para observarlos a simple vista. Sin embargo, se pueden detectar mediante dis-positivos sensitivos de medición.
La deformación unitaria lateral �� en cualquier punto en una barra es proporcional a la deformación unitaria axial � en el mismo punto si el ma-terial es linealmente elástico. La relación de esas deformaciones unitarias es una propiedad del material conocida como relación de Poisson. Esta relación adimensional, que en general se denota por la letra griega n (nu), se puede expresar mediante la ecuación
needeformación unitaria axial
deformación unitaria lateral (1.9)
El signo menos agregado en la ecuación es para compensar el hecho de que las deformaciones unitarias lateral y axial por lo general tienen signos opuestos. Por ejemplo, la deformación unitaria axial en una barra en tensión es positiva y la deformación unitaria lateral es negativa (debido a que el an-cho de la barra disminuye). Para compresión tenemos la situación opuesta ya que la barra se acorta (deformación unitaria axial negativa) y se hace más ancha (deformación unitaria lateral positiva). Por tanto, para materiales ordinarios la relación de Poisson tendrá un valor positivo.
Cuando se conoce la relación de Poisson para un material, podemos obtener la deformación unitaria lateral a partir de la deformación unitaria axial como sigue:
e ne (1.10)
Al emplear las ecuaciones (1.9) y (1.10) siempre debemos tener en cuenta que sólo se aplican a una barra sometida a esfuerzo axial, es decir, una barra para la cual el único esfuerzo es el esfuerzo normal s en la dirección axial.
FIGURA 1.22 Alargamiento axial y contracción lateral de una barra prismática en tensión (a) antes de aplicar la carga y (b) barra después de aplicar la carga. (Las deformaciones de la barra se muestran muy exageradas.)
P
(b)
P
(a)

La relación de Poisson recibe su nombre en honor del matemático fran-cés Siméon Denis Poisson (1781-1840), quien intentó calcular esta relación mediante una teoría molecular de los materiales (referencia 1.8). Para ma-teriales isotrópicos, Poisson determinó que n = 1/4. Cálculos más recientes basados en mejores modelos de estructura atómica dan como resultado n = 1/3. Esas dos cifras están cercanas a los valores reales medidos, que están en el rango de 0.25 a 0.35 para la mayor parte de los metales y para muchos otros materiales. Entre los materiales con un valor extremadamente bajo de la relación de Poisson se incluyen el corcho, para el cual n es prácticamente cero y el concreto, para el cual n es aproximadamente 0.1 o 0.2. Un límite teórico superior para la relación de Poisson es 0.5, como se explica en la sección 7.5. El caucho se acerca a este valor limitante.
En el apéndice H se da una tabla de relaciones de Poisson para varios materiales en el rango linealmente elástico (consulte la tabla H.2). Para la mayor parte de los fi nes se supone que la relación de Poisson es la misma tanto en tensión como en compresión.
Cuando las deformaciones unitarias en un material son grandes, la rela-ción de Poisson cambia. Por ejemplo, en el caso del acero estructural la relación llega hasta 0.5 cuando ocurre la fl uencia plástica. Así, la relación de Poisson permanece constante sólo en el rango linealmente elástico. Cuando el com-portamiento del material es no lineal, la relación entre la deformación unitaria lateral y la deformación unitaria axial con frecuencia se denomina relación de contracción. Por supuesto, en el caso especial de comportamiento linealmente elástico, la relación de contracción es igual que la relación de Poisson.
Limitaciones
Para un material particular, la relación de Poisson permanece constante en todo el rango linealmente elástico, como ya se explicó antes. Por tanto, en cualquier punto dado en la barra prismática de la fi gura 1.22, la deforma-ción unitaria lateral permanece proporcional a la deformación unitaria axial conforme la carga aumenta o disminuye. Sin embargo, para un valor dado de la carga (que signifi ca que la deformación unitaria axial es constante en toda la barra), se deben cumplir condiciones adicionales si las deformacio-nes unitarias laterales deben ser las mismas en toda la barra.
En primer lugar, el material debe ser homogéneo, es decir, debe tener la misma composición (y en consecuencia las mismas propiedades elásticas) en cada punto. Sin embargo, tener un material homogéneo no signifi ca que las propiedades elásticas en un punto particular sean las mismas en todas las direc-ciones. Por ejemplo, el módulo de elasticidad podría ser diferente en las direc-ciones axial y lateral, como en el caso de un poste de madera). Por tanto, una segunda condición para la uniformidad en las deformaciones unitarias laterales es que las propiedades elásticas deben ser las mismas en todas las direcciones perpendiculares al eje longitudinal. Cuando se cumplen las condiciones ante-riores, como es el caso frecuente con los metales, las deformaciones unitarias laterales en una barra prismática sometida a una tensión uniforme serán las mismas en cada punto en la barra y también en todas las direcciones laterales.
Los materiales que tienen las mismas propiedades en todas las direc-ciones (ya sea axial, lateral o cualquier otra dirección) se llaman isotró-picos. Si las propiedades difi eren en distintas direcciones, el material es anisotrópicos (aeolotrópico).
En este libro, todos los ejemplos y problemas se resuelven suponiendo que el material es linealmente elástico, homogéneo e isótropo, a menos que se especifi que lo contrario.FIGURA 1.22 (Repetida.)
SECCIÓN 1.5 Elasticidad lineal, ley de Hooke y relación de Poisson 29
P
(b)
P
(a)

30 CAPÍTULO 1 Tensión, compresión y cortante
Ejemplo 1.3
Un tubo de acero con longitud L = 4.0 ft, diámetro exterior d2 = 6.0 in y diámetro interior d1 = 4.5 in se comprime mediante una fuerza axial P = 140 k (fi gura 1.23). El material tiene un módulo de elasticidad E = 30,000 ksi y una relación de Poisson n = 0.30.
Determine las siguientes cantidades para el tubo: (a) su acortamiento d, (b) la deformación unitaria lateral �’, (c) el aumento ∆d2 del diámetro exterior y el aumen-to ∆d1 del diámetro interior y (d) el aumento ∆t en el espesor de la pared.
SoluciónEl área A de la sección transversal y el esfuerzo longitudinal s se determinan
como sigue:
A p4
d22 d2
1p4
(6.0 in)2 (4.5 in)2 12.37 in2
s PA 12
1.3470
ikn2 11.32 ksi (compresión)
Como el esfuerzo es mucho menor que el esfuerzo de fl uencia (consulte la tabla H.3 del apéndice H), el material se comporta en forma linealmente elástica y la deforma-ción unitaria axial se puede determinar a partir de la ley de Hooke:
e sE 30,
110.0302
kkssii
377.3 10 6
El signo de menos para la deformación unitaria indica que el tubo se acorta.(a) Conociendo la deformación unitaria axial, ahora podemos determinar el
cambio de longitud del tubo (consulte la ecuación 1.2)
d eL ( 377.3 10 6)(4.0 ft)(12 in/ft) 0.018 in
De nuevo el signo negativo indica un acortamiento del tubo.(b) La deformación unitaria lateral se obtiene de la relación de Poisson (con-
sulte la ecuación 1.10):
e9 2ne 2(0.30)( 377.3 10 6) 113.2 10 6
El signo positivo de �� indica un aumento de las dimensiones laterales, como se esperaba para un esfuerzo de compresión.
FIGURA 1.23 Ejemplo 1.3. Tubo de acero en compresión.
L
P
d1
d2
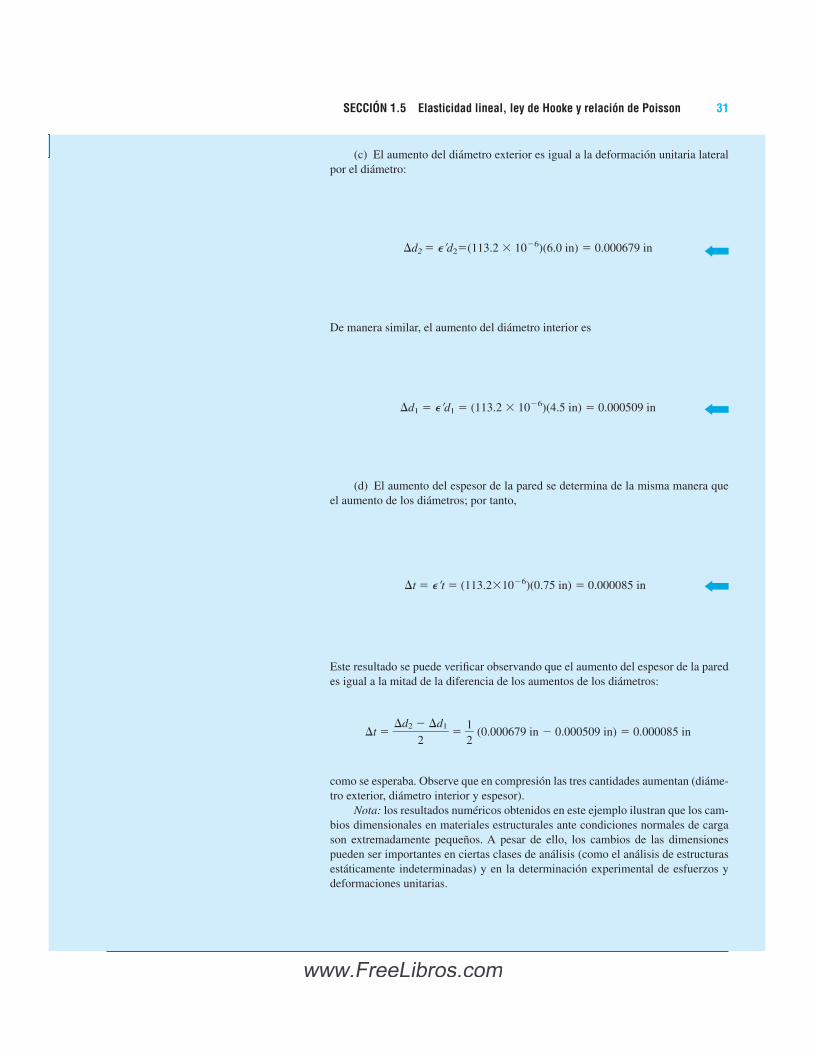
(c) El aumento del diámetro exterior es igual a la deformación unitaria lateral por el diámetro:
d2 e9d2 (113.2 10 6)(6.0 in) 0.000679 in
De manera similar, el aumento del diámetro interior es
d1 e9d1 (113.2 10 6)(4.5 in) 0.000509 in
(d) El aumento del espesor de la pared se determina de la misma manera que el aumento de los diámetros; por tanto,
t e9t (113.2 10 6)(0.75 in) 0.000085 in
Este resultado se puede verifi car observando que el aumento del espesor de la pared es igual a la mitad de la diferencia de los aumentos de los diámetros:
td2
2
d1 12
(0.000679 in 0.000509 in) 0.000085 in
como se esperaba. Observe que en compresión las tres cantidades aumentan (diáme-tro exterior, diámetro interior y espesor).
Nota: los resultados numéricos obtenidos en este ejemplo ilustran que los cam-bios dimensionales en materiales estructurales ante condiciones normales de carga son extremadamente pequeños. A pesar de ello, los cambios de las dimensiones pueden ser importantes en ciertas clases de análisis (como el análisis de estructuras estáticamente indeterminadas) y en la determinación experimental de esfuerzos y deformaciones unitarias.
SECCIÓN 1.5 Elasticidad lineal, ley de Hooke y relación de Poisson 31

40 CAPÍTULO 1 Tensión, compresión y cortante
Ejemplo 1.5
FIGURA 1.30 Ejemplo 1.5. (a) Conexión con pasador entre el puntal S y la placa base B. (b) Sección transversal a través del puntal S.
Un puntal S de acero que sirve como riostra para un malacate marino transmite una fuerza de compresión P = 12 k a la plataforma de un muelle (fi gura 1.30a). El puntal tiene una sección transversal hueca con espesor de pared t = 0.375 in (fi gura 1.30b) y el ángulo u entre el puntal y la horizontal es 40°. Un pasador que atraviesa el puntal transmite la fuerza de compresión del puntal a dos placas de unión G que están soldadas a la placa base B. Cuatro pernos de anclaje sujetan la placa base a la plataforma.
El diámetro del pasador es dpasador = 0.75 in, el espesor de las placas de unión es tG = 0.625 in, el espesor de la placa base es tB = 0.375 in y el diámetro de los pernos de anclaje es dperno = 0.50 in.
Determine los esfuerzos siguientes: (a) el esfuerzo de soporte entre el puntal y el pasador, (b) el esfuerzo cortante en el pasador, (c) el esfuerzo de soporte entre el pasador y las placas de unión, (d) el esfuerzo de soporte entre los pernos de anclaje y la placa base y (e) el esfuerzo cortante en los pernos de anclaje. (No tenga en cuenta la fricción entre la placa base y la plataforma.)
= 40°
P
S
B
)b()a(
G GS
t
Pasador
u
G
Solución
(a) Esfuerzo de soporte entre el puntal y el pasador. El valor promedio del esfuerzo de soporte entre el puntal y el pasador se determina dividiendo la fuerza en el puntal entre el área total de soporte del puntal contra el pasador. Ésta última es igual al doble del espesor del puntal (debido a que el soporte se tiene en dos ubica-ciones) por el diámetro del pasador (consulte la fi gura 1.30b). Por tanto, el esfuerzo de soporte es
sb1 2tdP
perno21.3 ksi
12 k2(0.375 in)(0.75 in)

Este esfuerzo de soporte no es excesivo para un puntal de acero estructural.(b) Esfuerzo cortante en el pasador. Como se observa en la fi gura 1.30b, el
pasador tiende a cortarse en dos planos, que son los planos entre el puntal y las placas de unión. Por tanto, el esfuerzo cortante promedio en el pasador (que está en cortante doble) es igual a la carga total aplicada al pasador dividida entre dos veces el área de su sección transversal.
tpasador 2pdP
2pasador/4 2p(0.
1725
kin)2/4
13.6 ksi
Normalmente el pasador se fabricaría con acero de alta resistencia (esfuerzo de fl uencia en tensión mayor que 50 ksi) y con facilidad podría soportar este esfuerzo cortante (el esfuerzo de fl uencia en cortante usualmente es al menos 50% del esfuer-zo de fl uencia en tensión).
(c) Esfuerzo de soporte entre el pasador y las placas de unión. El pasador se apoya contra las placas de unión en dos puntos, por tanto el área de soporte es el doble del espesor de las placas de unión por el diámetro del pasador; entonces,
sb2 2tG
Pdpasador
12.8 ksi12 k
2(0.625 in)(0.75 in)
que es menor que el esfuerzo de soporte entre el puntal y el pasador (21.3 ksi).(d) Esfuerzo de soporte entre los pernos de anclaje y la placa base. La compo-
nente vertical de la fuerza P (consulte la fi gura 1.30a) se transmite a la plataforma por soporte directo entre la placa base y la plataforma. Sin embargo, la componente horizontal se transmite a través de los pernos de anclaje. El esfuerzo de soporte promedio entre la placa base y los pernos de anclaje es igual a la componente hori-zontal de la fuerza P dividida entre el área de soporte de los cuatro pernos. El área de soporte para un perno es igual al espesor de la placa base por el diámetro del perno. En consecuencia, el esfuerzo de soporte es
sb3P4ctB
ods
perno
40°12.3 ksi
(12 k)(cos 40°)4(0.375 in)(0.50 in)
(e) Esfuerzo cortante en los pernos de anclaje. El esfuerzo cortante promedio en los pernos de anclaje es igual a la componente horizontal de la fuerza P dividida entre el área total de la sección transversal de los cuatro pernos (observe que cada perno está sometido a cortante simple). Por lo tanto,
tpernoP
4pcdos2perno
40
/4
°4(1p2(0k.)5(c0oisn4)02/
°4)
11.7 ksi
Cualquier fricción entre la placa base y la plataforma reduciría la carga sobre los pernos de anclaje.
SECCIÓN 1.6 Esfuerzo cortante y deformación unitaria cortante 41

42 CAPÍTULO 1 Tensión, compresión y cortante
Una placa de soporte del tipo empleado para sostener máquinas y trabes de puentes consiste en un material linealmente elástico (por lo general un elastómero como el caucho) cubierto con una placa de acero (fi gura 1.31a). Suponga que el espesor del elastómero es h, que las dimensiones de la placa son a × b y que la placa está sometida a una fuerza cortante horizontal V.
Obtenga fórmulas para el esfuerzo cortante promedio tprom en el elastómero y el desplazamiento horizontal d de la placa (fi gura 1.31b).
Ejemplo 1.6
FIGURA 1.31 Ejemplo 1.6. Placa de soporte en cortante.
a
h
b VVVVVVVVVVVVVVVVh
a
d V
(a) (b)
g
Solución
Suponga que los esfuerzos cortantes en el elastómero están distribuidos uni-formemente en todo el volumen del mismo. Entonces el esfuerzo cortante sobre cualquier plano horizontal a través del elastómero es igual a la fuerza cortante V dividida entre el área ab de la placa (fi gura 1.31a):
tprom aVb
(1.16)
La deformación unitaria cortante correspondiente (de la ley de Hooke para cortante; ecuación 1.14) es
gt
Gprom
e abVGe
(1.17)
en donde Ge es el módulo de corte del material elastomérico. Por último, el despla-zamiento horizontal d es igual a h tan g (de la fi gura 1.31b):
d h tan g h tanab
VGe
(1.18)
En la mayor parte de las situaciones prácticas la deformación unitaria por cortante g es un ángulo pequeño y en esos casos tan g se puede sustituir por g y obtenemos
d hgahbVGe
(1.19)
Las ecuaciones (1.18) y (1.19) dan resultados aproximados del desplazamiento horizontal de la placa, debido a que se basan en la suposición de que el esfuerzo cor-tante y la deformación unitaria cortante son constantes en todo el volumen del material elastomérico. En realidad, el esfuerzo cortante es cero en los bordes del material (por-que no hay esfuerzos cortantes sobre las caras verticales libres) y, por tanto, la de-formación del material es más compleja que la representada en la fi gura 1.31b. Sin embargo, si la longitud a de la placa es grande en comparación con el espesor h del elastómero, los resultados anteriores son satisfactorios para fi nes de diseño.