Embed Size (px)
Citation preview

67
CAPITULO 3
METODOLOGÍA
La metodología empleada para elaborar las estimaciones por medio de la Metodología de
Box Jenkins consta de varias partes. A continuación se introducirán los temas que son
necesarios para poder realizar los pronósticos pertinentes para cada medicamento.
Es importante mencionar que la metodología que a continuación se detalla, se caracteriza
por su dificultad y por su exactitud en los resultados.
3.1 Estacionariedad
Un proceso estocástico se dice que es estrictamente estacionario si sus propiedades no son
afectadas por un cambio de la serie original, en otras palabras la función de probabilidad
conjunta en cualquier momento t (t1,t2,t3,...,tm) debe de ser la misma que en el tiempo
t1+k,t2+k,t3+k,...,tm+k donde k es un cambio aleatorio a lo largo del tiempo x.
La función marginal en cualquier otro punto en el tiempo p(xt) = p(xt+k) lo cual implica que
la media y la varianza son constantes.
Si m es igual a 2, entonces la estacionariedad implica que todas las distribuciones
bivariadas p(xt, xt-k) no dependerán de t, pues las covarianzas son funciones solo del
retraso de k y no de t.
[ ] [ ] [ ] µ==== nxExExE ...21
[ ] [ ] [ ] 221 ... σ==== nxVarxVarxVar
(3.1)
(3.2)
(3.3)

68
),(),(...)(),( 2,211 kttnknkk xxCovxxCovxxCovxxCov −−++ ====
La estacionariedad implica que la media y la varianza de un proceso sean iguales y las
autocovarianzas se comporten de la siguiente manera:
( )( )[ ]µµγ −−== −− ktktt xxExxCov ),(
Las autocorrelaciones serían:
[ ] 0
2)()(),(
γγ
ρ k
ktt
kttk xVarxVar
xxCov==
−
−
Que dependerán solo del retraso (ó diferencias en el tiempo k). Estas condiciones sólo
aplican para la función generadora de momentos de primer (p=1) y segundo orden (p=2) y
se les conoce como estacionariedad débil, ó bien estacionariedad en el sentido débil. Si
además se asume normalidad conjunta, y la distribución es completamente caracterizada
por estos dos primeros momentos estrictamente estacionarios y de estacionariedad débil,
entonces son equivalentes. Las autocorrelaciones consideradas como una función k se
refieren a la función de autocorrelación (ACF) ó al correlograma. Observe que:
kktttktkttk xxCovxxCovxxCov −+−− ==== γγ ),(),(),(
Así que ρk=ρ-k por lo que sólo la mitad positiva de los ACF es generalmente dada. El
proceso estocástico estacionario describe la evolución de xt. Esto por lo tanto indica que al
medir el grado a cada valor del proceso esté correlacionado con los valores previos, la
longitud y la fuerza de la memoria del proceso.
(3.4)
(3.5)
(3.6)

69
El estadístico de Ljung Box informa si los residuos son independientes planteando las
siguientes hipótesis:
Ho: Los k primeros coeficientes de correlación son iguales a cero:
ρ1=ρ2=…=ρκ=0
Ha: Al menos existe un coeficiente de correlación diferente de cero:
0≠iρ
Para calcular el estadístico Q se toma en cuenta la siguiente formulación matemática:
( )( )∑= −−
+−−=k
j
jk jpn
rpnpnQ
1
2
2
El cual se distribuye Chi-Cuadrada con k-p grados de libertad; donde ri son las
correlaciones correspondientes a los primeros k retardos. Al realizar el test se escoge el
parámetro k, el cual es el entero próximo a 10*(ln(n-p)). Esto se hace con un nivel de
significación α = .05.
Existe otra prueba dentro del análisis estadístico que compara las medias de dos categorías
numéricas de distribución normal. Dicha prueba es conocida como t-Student, dependiendo
del estadístico t le corresponderá un valor de significación determinado.
Las hipótesis a considerar son:
Ho: La media de la variable numérica “y” no tiene diferencias en los subgrupos de la
variable categórica “x”.
Ha: La media de la variable numérica “y” tiene diferencias en los subgrupos de la variable
categórica “x”.
(3.7)

70
Si la muestra es independiente, el estadístico t es utilizado para comparar medias de 2
grupos.
Si la muestra es dependiente, el estadístico t es utilizado para comparar las medias de un
mismo grupo en diferentes etapas.
En el software Minitab:
Para las Autocorrelaciones Simple y Parcial, se puede examinar el estadístico de t que hace
pruebas si existe algún retrazo que sea igual a cero. Una regla común está dada por el valor
absoluto del estadístico, si es mayor que 1.25 para los primeros 3 retrasos, ó mayor a 2 para
los retrasos del 4 en adelante, entonces, el retraso no es igual a cero.
Esto es útil cuando se trata de identificar el modelo ARIMA (Auto Regressive Integrated
Moving Average) y cuando se está haciendo un diagnóstico de chequeo con el modelo
ARIMA ajustado. Cuando se trata de identificar un modelo, se deberá de analizar esos
retrasos diferentes de cero. Para corroborar un modelo ajustado, si se computan las
Funciones de Autocorrelación ó las Funciones de Autocorrelación Parcial para los
residuales almacenados, se debe usar la prueba del estadístico t que iguala a cero las
autocorrelaciones pues es una restricción para el modelo ARIMA.11
11 Ayuda del Software de Minitab

71
Prueba de Raíz Unitaria sobre Estacionariedad
Esta prueba considera la ecuación (3.8) como una regresión de primer orden o bien un
modelo AR(1).
Yt = Yt-1 + ut
Donde:
ut = error con media cero y varianza constante conocido como ruido blanco.
Si el coeficiente de Yt-1 es igual a uno, entonces se encuentra en un problema de no
estacionariedad conocido como Problema de Raíz Unitaria.
Para resolver este problema es necesario hacer una regresión:
Yt = ρYt-1 + ut
Si ρ es uno, entonces Yt tiene una raíz unitaria, por tanto no es estacionaria. La ecuación
(3.9) se puede escribir como:
∆Yt = (ρ -1)Yt-1 + ut
∆Yt = δYt-1 + ut
Donde:
δ = (ρ -1 )
∆ = primera diferencia
El estadístico Tau considera la hipótesis nula de que ρ = 1 contra la alternativa de que ρ <
1 Esta prueba se conoce como la Prueba de Dickey Fuller, se consultan los datos de la tabla
para analizar si se rechaza la hipótesis nula ρ = 1. Si |τ| excede los valores absolutos τ
críticos de Dickey Fuller, entonces la serie es estacionaria, sin embargo se debe de tener
(3.8)
(3.9)
(3.10)

72
cuidado pues los estadísticos de Dickey-Fuller en ocasiones aceptan incorrectamente la
hipótesis nula. La prueba se aplica a regresiones de la siguiente forma:
∆Yt = δYt-1 + ut
∆Yt = β1 + δYt-1 + ut
∆Yt = β1 + β2t + δYt-1 + ut
Donde:
t = representa la tendencia ó tiempo.
β1 = constante
β2t = término de tendencia
3.2 Función de Autocorrelación
La Función de Autocorrelación es la función que mide la correlación que existe entre los
valores de una serie de tiempo que están distanciados k periodos uno de otro. Dicha
función está compuesta por los coeficientes de autocorrelación rk que van desde uno hasta
no más de la mitad de los datos históricos.
La fórmula 3.14 muestra el coeficiente de correlación simple cuando se tienen N pares de
observaciones:
Supongamos que se tienen N datos históricos x1,x2,...,xn se pueden formar N-1 parejas de
datos históricos contiguos, es decir, (x1,x2), (x2,x3),...,( xN-1,xN) y calcular el coeficiente de
(3.11) (3.12) (3.13)
∑ ∑∑
−−
−−=
22 )()(
))((
xxyy
xxyyr
ii
ii (3.14)

73
correlación, que se denominara coeficiente de autocorrelación de primer orden y se denota
como r1. Ahora bien, si se separan las parejas por una distancia de 2, es decir, (x1,x3),
(x2,x4),...,( xN-2,xN) y se calcula su coeficiente de autocorrelación, éste será de orden 2 y se
denota como r2, y así sucesivamente se pueden calcular los coeficientes de autocorrelación
para parejas que datos históricos separados k periodos de tiempo uno del otro y se denota
como rk, y su coeficiente de autocorrelación será de orden k. Cada coeficiente de
Autocorrelación tiene un error estándar y un intervalo de confianza.
Es de suma importancia analizar la estacionalidad de la serie, pues si ésta se encuentra
presente, entonces los datos históricos que están separados entre sí por los mismos
intervalos deben estar correlacionados de alguna forma. Por tanto, el coeficiente de
autocorrelación para un retraso igual al periodo estacional deberá de ser diferente de cero.
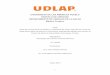
3.3 Función de Autocorrelación Parcial
El coeficiente de autocorrelación de orden k se calcula la correlación entre parejas de datos
que están separados k distancia, sin embargo, a diferencia de la Función de
Autocorrelación, la Función de Autocorrelación Parcial elimina el efecto producido por
retardos anteriores a k. En la Figura 3.1 se muestra una gráfica típica de una función de
autocorrelación parcial. Las líneas punteadas representan los intervalos de confianza.

74
Figura 3.1 Función de Autocorrelación Parcial
Fuente: Molinero, Luis
3.4 Ruido
• Blanco
Se le llama Ruido blanco cuando sus valores son una sorpresa, es decir, son independientes
de su valor pasado. Un proceso es ruido blanco si cumple las siguientes condiciones:
• E(εt)=0
• Var(εt) = σ2ε Varianza Constante
• Cov(εt,εt-j) = 0 para todo j diferente de 0
Figura 3.2 Ruido Blanco
Fuente: Universidad de Oviedo

75
• Ruido Negro
Este ruido se asocia con desastres, como bajas tendencias; pues su comportamiento es
decreciente con el tiempo
Figura 3.3 Ruido Negro
Fuente: Universidad de Oviedo
3.5 Modelos Autorregresivos
En Series de Tiempo, modelar la información contenida en valores pasados de una variable
económica yt es útil para pronosticar valores futuros. Existe un modelo estadístico que
refleja esta característica.
Un ejemplo del modelo estadístico que representa este tipo de dependencia retrasada está
dado por el siguiente proceso autorregresivo de orden uno:
yt = δ + θ1 yt-1 + et t = 1,2, … , T
donde:
δ = Es un parámetro de la intercepción.
θ1 = Es un parámetro desconocido entre -1 y 1
(3.15)

76
et = Es un error aleatorio sin correlación, con µ = 0 y con varianza constante σe2
Un modelo es de primer orden como la ecuación (3.8) si yt depende sólo de su valor en el
periodo previo yt-1, más un disturbio aleatorio. Ésta especificación es denotada como
Modelo de Series de Tiempo AR(1) ó Proceso AR(1). El primer orden de la estructura de
autocorrelación en la ecuación de los errores es un caso especial para el modelo AR(1). En
el modelo de correlación, el parámetro δ es igual a 0, y únicamente se reflejan las variables
aleatorias de los errores aleatorios no observables et así como las variables observables yt.
Cuando especificando un modelo estadístico de series de tiempo para una variable
económica, la naturaleza exacta del proceso que genera la serie de tiempo y1,y2, ... yt es
generalmente desconocida y más complicada que el autorregresivo de primer orden.
Específicamente yt no sólo dependerá de yt-1 sino también de yt-2, yt-3 y así sucesivamente,
el modelo AR(p) es un modelo estadístico para un proceso autorregresivo, de orden p.
yt = δ + yt-1 + qyt-2 +qyt-3+ ... + qyt-p + et
Donde:
δ = Es el parámetro de la intercepción y está relacionado con la media de yt.
q = Son los parámetros autorregresivos desconocidos.
et = Son las variables aleatorias de los errores y se asume que no están relacionados pues
cuentan con µ = 0 y varianza σ2e.
3.5.1 Propiedades Estadísticas de los AR(1)
Las series de tiempo asumen que el proceso de series de tiempo que genera resultados yt
comienza en el pasado infinito y continúa al futuro infinito. Se asume que el pasado y el
(3.16)

77
futuro son variables aleatorias con la misma función de densidad f(yt) y se asume que
tienen la misma media y varianza. Además se asume que las covarianzas entre cualquiera
de las dos variables aleatorias, es decir, yt y yt+s no dependen del tiempo, sólo del retraso
que existe entre dos variables aleatorias. Esto es importante si se está buscando predecir el
futuro basandose en el pasado. Si el proceso de la generación de datos que producen las
observaciones no sostiene los valores reales futuros de las variables aleatorias, entonces el
pronóstico basado en los datos no será confiable.
3.5.2 El proceso de la media para un AR(1)
Si los resultados observados yt de una serie de tiempo tienen la misma función de densidad
para todos los periodos en el tiempo, entonces la media de yt y su varianza, deben ser
iguales en todos los periodos. En términos de la media, esto implica que:
Tomando el valor esperado de yt se obtiene:
Se asume que δ = 0 en los modelos AR(1), por tanto la media de las variables en la serie de
tiempos yt es µ = 0.
[ ] [ ] µ=== − ...1tt yEyE
[ ] [ ]
1
1
1
1 θδµ
µθδµµθδ
−=
+=++= tt eEyE
(3.17)

78
3.5.3 La varianza y la covarianza de los AR(1)
Se asume que las varianzas son iguales en todos los periodos. De la ecuación 3.15 se
obtiene la varianza del Modelo:
En adición con la media de y la varianza de yt que son idénticos para todos los periodos en
el tiempo, en las variables de series de tiempo, se asume que sus covarianzas son
constantes en el tiempo.
Mientras más grande sea el valor absoluto de la covarianza, mayor será la dependencia
lineal. Si la Covarianza es cero, entonces no existe dependencia lineal. Para esto se toma
un punto (y1,y2) donde el E[y1]=µ1 y el E[y2]=µ2, se miden las desviaciones de los valores
y1 y y2 con respecto al esperado, por tanto:
( ) ( )[ ] ( )[ ][ ][ ][ ]
[ ] [ ]2
1
12
11
111
1
111
)(
,
y
ttt
ttt
tt
tttttt
yeEyE
yeyEyyE
yEyyEyEyyCov
σθ
θ
θ
=
+=
+==
−−=
−−
−−
−
−−− ο
pues el ( )tyE = 0
Por tanto la covarianza para todas las variables aleatorias que están separadas por dos
periodos está dada por:
[ ] [ ][ ] [ ] [ ][ ] [ ] [ ][ ]( )
21
22
221
12
1
12
1
112
1
1
θσσ
σθ
θ
θ
θσ
−=
=−
=−
+=
+==
−
−
−
eyt
et
ttt
ttt
ttytt
yVar
eVaryVaryVar
eVaryVaryVar
eyVaryVar
et y yt-1 no están relacionados (3.19)
(3.18)

79
( ) [ ]
( ) [ ] 213232
212121
,,
,,
ytttt
ytttt
yyEyyCov
yyEyyCov
σθ
σθ
==
==
−−−−
−−−−
3.6 Modelos ARIMA, Box-Jenkins
Los modelos ARIMA cuyas siglas en inglés corresponden a los modelos autoregresivos
que están integrados mediante promedios móviles también son conocidos como modelos
Box-Jenkins, pues son los apellidos de los creadores de dicho método en 1976. Estos
forman parte del Análisis de Series de Tiempo y se basan en la teoría de Procesos
Estocásticos.
La técnica ARIMA se refiere a los Modelos Integrados, Autorregresivos con Medias
Móviles, y tiene por objeto predecir la serie temporal mediante un modelo. Dentro de los
requisitos para efectuar estimaciones con éste método es contar con mínimo 36 datos
históricos.
Existen varias notaciones para dicho modelo. El modelo ARIMA tiene la siguiente
notación:
ARIMA(p,d,q)
Donde:
p = Es el número de parámetros autorregresivos
d = Es el número de diferenciaciones para que una serie sea estacionaria
q = Es el número de parámetros de medias móviles
Ahora bien, si se desea la notación con operador de rezagos, entonces será (1-B) ó ∆:
(1-B)zt = ∆zt = zt – zt-1
(3.20)
(3.21)

80
La notación extendida de un modelo ARIMA (p,q) será:
tq
qtp
p aBBBzBBB )...1()...1( 221
221 θθθφφφ −−−−=−−−−
Entonces, la notación para los modelos MA(1) y MA(2) será:
2211
11
)2()1(
−−
−
−−=→−=→
tttt
ttt
aaazMAaazMA
θθθ
Y la notación que se utiliza para los modelos autorregresivos de primer y segundo orden
es:
tt azBAR =−→ )1()1( 1φ
ttt
ttt
azz
azz
+=
=−
−
−
11
11
φ
φ
tttt azzzAR ++=→ −− 2211)2( φφ
La notación para los modelos mixto es decir ARMA(1,1) es:
1111)1,1( −− −+=→ tttt aazzARMA θφ
Donde:
at = ruido blanco
zt = datos históricos
Este proceso ARIMA realiza 3 pasos que se pueden observar en la Figura 3.4.
(3.22)
(3.23) (3.24)
(3.25) (3.26) (3.27) (3.28) (3.29)

81
Figura 3.4 Proceso Box- Jenkins
Fuente: Banco Central de Costa Rica
Identificación: El primero paso para la aplicación de éste método es que la serie sea
estacionaria, ver ecuaciones (3.1), (3.2) y (3.3).
El grado de diferenciación (d) es el número de veces que se debe de diferenciar una serie
para lograr la estacionariedad.
En ocasiones la serie se vuelve estacionaria al momento en que se restan los valores
históricos, sin embargo, otras veces es necesario elaborar la diferencia de los valores
observados; en dados casos, d = 1, es decir, tiene una raíz unitaria.
En la Figura 3.5 se pueden ver dos gráficas, una de una serie estacionaria y la otra de una
serie no estacionaria

82
Figura 3.5 Ejemplos de Series
Fuente: Banco Central de Costa Rica
En el Anexo 1 se pueden observar de manera general los correlogramas simple y parcial
para modelos autorregresivos y de medias móviles.
Estimación
Se debe de minimizar la suma de mínimos cuadrados de los residuos así que es necesario
buscar el vector de los parámetros del modelo por el que la función objetivo mejora, lo cual
se logra a través de varias iteraciones. Para esto se puede utilizar algún paquete de cómputo
como Stata, E-Views, Minitab ó cualquier otro de estadística.
Verificación
Se debe de analizar los residuos, la bondad del ajuste del modelo estimado y los
parámetros del modelo una vez que el modelo ARIMA ha sido estimado.
Para los valores de los parámetros se debe verificar las condiciones de: invertibilidad y de
estacionariedad.

83
• La invertibilidad es que a dos secuencias diferentes de entrada, le correspondan dos
diferentes de salida, esto es que no se pierde información Para verificar la
invertibilidad se tiene la siguiente condición: |θ| < 1.
• Cuando es casi imposible conocer la función de distribución verdadera para los
procesos aleatorios se le denomina como estacionariedad sentido fuerte.
Las condiciones para que un proceso sea estocástico son:
o E(Yt)=µ es decir tiene media constante.
o Var(Yt)=E(Ytm)2=σ2 es decir, tiene varianza constante.
o Cov(Yt,Yt-1)=Cov(Yt+m,Yt+m-1) es decir, la covarianza es igual para pares de
observaciones que tienen la misma distancia.
• Para verificar la estacionariedad |θ| < 1
• Significancia de los Parámetros, se debe de ver que todos los parámetros sean
diferentes de cero, un método es con el estadístico t- Student.
Se debe de realizar un análisis de los residuos, que constan de un análisis gráfico, de un
histograma, un correlograma de los residuos y un estadístico Q de Box Pierce que se
encuentra dentro del presente capítulo. El valor de Q se compara con el de la Tabla de X2
con k grados de libertad. Si la Q es mayor que el de la Tabla del Estadístico, entonces se
rechaza la hipótesis de la estacionariedad.

84
Pronóstico
Después de elegir el modelo ARIMA que mejor se acople a los datos, una vez que se ha
verficado, se procede a utilizar el modelo para realizar el pronóstico, asegurándose que
existirá el menor error posible.
3.7 Análisis de Intervención
Cuando un modelo ARIMA es afectado por cambios tecnológicos, huelgas, impuesto,
cambios en medidas de política, o de legislación, etc., se dice que es un modelo ARIMA
con variables de intervención. En dado caso es necesario evaluar dichas intervenciones e
incorporarlos al modelo ARIMA por medio de variables artificiales binarias. A estas
variables se les conoces como variables dummy y se incorporan como impulsos y
escalones. Es necesario incorporar dichas variables, pues de lo contrario se podrían
observar sesgos en las estimaciones. Las principales variables de intervención que existen
son las siguientes:
Variables Impulso: Todas aquellas variables que intervienen en la serie sólo una vez en el
momento T. Es decir, en el momento T la variable vale uno, pero en cualquier otro
instante, la variable valdrá cero.
Variable Escalón: Esta variable afecta a partir del tiempo T sólo una vez, pero se
mantiene constante a partir de dicho cambio, es decir, antes del momento T la variable vale
cero, pero a partir de T la variable valdrá uno.

85
Variable Tendencia: Esta variable al igual que la anterior, vale cero antes del momento T,
sin embargo, a diferencia de las anteriores, en el momento T comienza a crecer de manera
ascendente.
Efecto Calendario: Este efecto se refiere a que se espera un mayor nivel en ciertos meses
con más días laborales, ó también difiere por días, es decir, si es lunes tendrá un valor
diferente que en viernes.
Efecto de la Semana Santa ó Pascua: Este efecto representa cierta influencia en la
actividad económica durante los meses de marzo y de abril.
Días de Comercio: Este efecto se refiere a la probabilidad de que en cierto mes se tenga
un nivel superior que otro debido a que posee más días.
En la Figura 3.7 se muestran las variables de intervención más importantes
Figura 3.6 Variables Dummy
Fuente: UNAM
La ecuación (3.31) muestra la incorporación de dichas variables al modelo ARIMA
ttt Nwfy += ),,( εδ (3.30)

86
Donde: la función es la parte determinística. Ahí se incluyen las variables de intervención.
Mientras que la Nt es la parte estocástica, el modelo ARIMA entra en la parte estocástica.
3.8 Modelos Estacionales
Los modelos estacionales utilizan el símbolo β para llamar a los operadores de retraso
cambiando la implementación del término del error de la serie de las observaciones periodo
a periodo.
Byt = yt-1
Mientras que Bkyt representa a β.
El primer paso en analizar una serie de tiempo estacional consiste en encontrar un conjunto
de valores estacionarios en la serie de tiempo que serán llamados zα,zα+1,...,zn. Si se tiene
un conjunto de n observaciones con valores en la serie de tiempo y1,y2,...,yn; y no poseen
variación estacional ni estacionariedad, entonces, se podrá utilizar una transformación para
obtener una serie de tiempo estacionaria utilizando la transformación de la ecuación (3.32)
que se muestra a continuación:
O bien la siguiente transformación:
Donde:
1−−=∇= tttt yyyz
212 2 −− +−=∇= ttttt yyyyz
∇ = 1 - Β (Operador no estacional)
(3.32) (3.33)
(3.31)

87
Si los valores no poseen una variación estacional, entonces significa que son no
estacionarios, y es posible que una de las transformaciones produzca series de tiempo
estacionarias.
Entonces:
Se tiene de manera general:
Donde:
d = Grado de diferenciaciónes no estacionales que se utilizarán para volver a la serie
estacional.
3.9 Modelos Estacionales SARIMA(p,d,q)(P,D,Q)s
Existen series que cada determinado tiempo ocurren cosas parecidas en las observaciones,
dichas ocurrencias se les conoce como puntos de ruptura. A dichos modelos se les conoce
como Modelos SARIMA (“Seasonal Autoregressive Integrated Moving Average Models”).
Generalmente en las Funciones de Autocorrelación se puede apreciar retardos cada
determinados intervalos, conocidos como rezagos estacionales. Si el patrón se observa cada
año y los datos son mensuales, el patrón será 12, mientras que si el patrón es semestral, el
patrón será de 6 y se tendrán 6 valores menos que en la serie original.
21
2
2
22
1
22
)21(
)1(
)1(
−−
−
+−=+−=
+−=
−=∇
−=−=−=∇
ttt
ttt
t
tt
tttt
tt
yyyyBByy
yBB
yBy
yyByyyBy
td
td yBy )1( −=∇
(3.34) (3.35) (3.36) (3.37) (3.38) (3.39) (3.40)

88
El acercamiento general para determinar el grado de diferencias requerido para reducir a
series de tiempo estacionarias se puede aproximar por casos:
• Caso 1
Si la Función de Autocorrelación Simple de la serie de datos original corta o desciende
rápidamente a cero, entonces los datos son estacionarios en media y no es necesario
elaborar ninguna diferenciación entre ellos.
• Caso 2
Si la función de Autocorrelación simple de los datos originales corta ó desciende
rápidamente a cero excepto en puntos de retraso estacional, por ejemplo 12, 24, 36. Es
entonces cuando se debe de analizar la función de autocorrelación en 12, 24, 36. Si se corta
después de 12 ó 24; ó bien, si aparece que baja rapidamente hacia cero entonces los datos
son estacionarios con un patrón estacional y no será necesario elaborar diferenciación.
Ahora bien si la serie desciende a cero lentamente, entonces los datos son no estacionarios,
y será necesario hacer una diferencia a la serie original; dicha diferencia se le conoce como
wt, que en este caso será wt = zt – zt-12 para t mayor ó igual a 13. Por tanto las primeras 12
observaciones se perderán. El número de diferenciaciones será el valor de D, en este caso
D =1 y el valor de wt se puede reexpresar como wt = (1 - βρ12 ) zt para t mayor o igual a 13
donde β es el operador de cambio de 12 periodos atrás. Ahora bien, si la función de
autocorrelación de la primera diferencia estacional corta ó baja rapidamente hacia cero, la
serie wt es estacionaria en media. Sin embargo, si la serie wt desciende lentamente hacia

89
cero, entonces será no estacionaria en media y se deberá considerar la serie obtenida por la
primera diferencia regular de wt. El resultado de la serie será:
wt = (zt-zt-12)-(zt-1-zt-13)
= zt-zt-1-zt-12+zt-13 para t mayor ó igual a 14
En este caso se pierden 13 observaciones y se puede reexpresar de la siguiente manera:
wt = (1-β)1(1-β12)zt para t mayor ó igual a 14
• Caso 3
Si la fución de Autocorrelación de la serie original baja extremadamente lento hacia cero
en los retrasos estacionales. Esto indica que la serie de tiempo original es no estacionaria
en la media y una diferencia regular será necesaria. De este modo se analiza la Función de
Autocorrelación de la serie diferenciada wt = zt - zt-1 para t mayor ó igual a 1; si corta ó baja
rapidamente hacia cero, entonces la serie de tiempo de la primera diferencia regular es
estacionaria en media. Si la Función de Autocorrelación de wt baja rapidamente hacia cero,
excepto en puntos en los retrasos estacionales, entonces como en el caso 2 se deberá
analizar la Función de Autocorrelación en 12, 24, 36 de la serie de tiempo wt. Si la Función
de Autocorrelación corta después del 12 ó del 24 ó bien baja rapidamente hacia cero, la
serie wt es estacionaria en media y ninguna diferencia será necesaria. Sin embargo, si la
serie wt desciende lentamente hacia cero, entonces será no estacionaria en media y se
deberá considerar la serie obtenida por la primera diferencia regular de wt. El resultado de
la serie de tiempo será dada por la ecuación (3.43).
wt = (z t -zt-1) - (zt-12 - zt-13)
= zt-zt-1-zt-12+zt-13 para t mayor ó igual a 13
(3.41) (3.42)
(3.43)

90
Como se puede observar, la ecuación (3.43) es la misma que la ecuación (3.41), por tanto
el orden de las diferencias d=1 y D=1, es irrelevante.
Las frases “cae rapidamente” ó “baja rapidamente” son arbitrarias y pudiesen ocasionar
confusión en los grados de diferenciación necesarios. Cuando la Función de
Autocorrelación de la serie ó de alguna de sus diferencias cause duda en si la serie es
estacionaria, se recomienda elaborar otra diferencia. Una de las ventajas de hacer esto es
que el pronóstico para las series de tiempo no estacionarias no están ajustadas a una media
arreglada como es el caso de las series estacionarias. Otra ventaja es que en situaciones
donde el grado de diferenciación está en duda, es generalmente el caso que el pronóstico
superior es obtenido cuando el grado más alto de la diferenciación es usado. Las gráficas
de la serie original y sus diferencias deben de ser también analizadas, pero la decisión del
grado de diferenciación se toma según la Función de Autocorrelación. También se deben
de estudiar las desviaciones estándar tanto de la serie original como de las diferencias para
evitar la sobrediferenciación. Si la desviación estándar aumenta conforme aumentan las
diferencias, entonces hay sobrediferenciación . Si la serie original es estacionaria en
varianza, cualquier diferencia regular o estacional de la serie de tiempo será estacionaria en
varianza.
La expresión general del modelo es la siguiente:
)()1()1(
)()())(()(
tDs
dt
Dsdt
ts
ts
XXBBW
ZBBWBB
∆∆=−−=
Θ=− θµφφ
Los operadores introducidos en la fórmula son:
Bs = Operador de retardo estacional definido Bs(Xt) = Xt-s.
(3.44) (3.45)

91
∆ = (1-B) = Operador de la diferencia regular.
∆s = (1-Bs) = Operador de la diferencia estacional.
Los operadores diferencia y diferencia estacional, en general remueven tendencias y
componentes estacionales de la serie respectivamente.
Wt = Serie desestacionalizada y sin tendencia, es decir, es estacionaria.
Xt = Serie observada.
B = Operador de retardos.
Φ(B) = Polinomio autorregresivo de orden p, correspondiente a la parte ordinaria de la
serie.
θ(B) = Polinomio de medias móviles de orden q, correspondiente a la parte ordinaria de la
serie.
Φ(Bs) = Polinomio autorregresivo de orden P, correspondiente a la parte estacional de la
serie.
Θ (Bs) = Polinomio de medias móviles de orden Q, correspondiente a la parte estacional
de la serie.
µ = Media de la serie estacionaria.
Zt =Perturbación del modelo.
D, d = Número de veces que se han aplicado los operadores diferencia estacional y
diferencia regular a la serie original para convertirla en estacionaria.
3.10 Descripción del Software Actual
MINITAB Statistical Software.

92
Es un sistema que ofrece diversas herramientas de fácil acceso para aplicaciones
estadísticas, incluso para personas que no estén relacionados con la estadística. Este
paquete garantiza confiabilidad en sus algoritmos estadísticos.
Dentro de este programa se puede realizar estadística básica y avanzada, regresiones
utilizar ANOVA, Series Temporales y predicción etc.
Este paquete está enfocado a números complejos y a la resolución de problemas con
procesos. También es un sistema de alta utilidad para mejorar el rendimiento de las
cadenas de producción.
Forecast Pro
Es un software eficiente para profesionales. Su sencilla utilización así como su exactitud es
lo que caracteriza a este paquete. Una de las ventajas de Forecast Pro es que al momento en
que se le dan los datos históricos de lo que se desea pronosticar y Forecast Pro se encargará
de analizar sus datos. La integración de sus pronósticos con otros sistemas de planeación es
una de sus innumerables características.
E Views
E Views ofrece análisis estadístico sofisticado, regresión y pronóstico. Usted podrá
convertir relaciones estadísticos de sus datos y luego estimar valores futuros. E Views fue
creado por economistas y la mayoría de sus usos son económicos, sin embargo, sus
limitaciones de este sistema no son las series de tiempo. E Views tiene ventajas en
visualizar características del moderno software de Windows.