Embed Size (px)
Citation preview

127
Fisica dei moti circolari e periodici
1. Il moto circolare Quali sono le caratteristiche del moto circolare? Una particella si dice animata di moto circolare quando la sua traiettoria è una cir-conferenza. Lo studio di questo tipo di moto avviene individuando due direzioni istantanee, cioè due rette orientate che cambiano ad ogni nuova lettura di cronome-tro. Si tratta della direzione radiale, lungo la semiretta che esce dal centro della cir-conferenza verso la posizione del punto che si sta muovendo; e della direzione tan-genziale, sulla retta tangente alla circonferenza, orientata nel verso del moto e per-pendicolare alla direzione radiale. Quali sono direzione e verso della velocità nel moto circolare? Quando una particella descrive una traiettoria curva, e una circonferenza in partico-lare, per capire la direzione della velocità possiamo immaginare che d’improvviso scompaiano tutte le forze in azione. La particella si troverebbe allora nella condizione contemplata dalla legge d’inerzia, la quale prevede che, in assenza di forze, il moto segua una linea retta. Si tratta della retta tangente alla traiettoria, che per definizio-ne viene assunta come direzione della velocità in quel dato istante. Che cosa sappiamo di sbagliato riguardo al moto circolare? Prima di iniziare l’analisi del moto circolare, è necessario rimuovere due idee errate che nei secoli si sono radicate, e che costituiscono un ostacolo alla comprensione di questo fenomeno.
• prima idea errata: un oggetto può seguire una traiettoria circolare senza che vi sia un ” binario” di qualche tipo che lo costringa a farlo.
• seconda idea errata: un oggetto in moto circolare tende ad essere scagliato verso l’esterno, in direzione radiale, dall’azione di una forza detta “centrifuga”.
Capitolo
5
v
direzioneradiale
direzionetangenziale
v

128
Perché occorre un “binario” per sostenere il moto circolare? La prima delle due concezioni errate risale agli antichi Greci, i quali ritenevano il mo-to circolare la traiettoria perfetta, perché pensavano fosse seguita dagli oggetti cele-sti. Essendo perfetta, la traiettoria circolare doveva essere una condizione naturale per i corpi, “incorruttibile”, cioè capace di sostenersi autonomamente e immutabile nel tempo. Da Galileo in poi sappiamo che questo ruolo “privilegiato” spetta al moto rettilineo uniforme, il solo a proseguire indefinitamente senza che debba intervenire alcuna forza, e che per tale caratteristica viene addirittura considerato uno stato. Vi-ceversa, muoversi lungo una traiettoria curva significa cambiare in ogni momento la direzione della velocità. Mutare velocità, anche se solo in direzione e non in intensità, vuol dire accelerare: una macchina che curvi con velocità di modulo costate
km/h| | 30v = , sta accelerando in direzione, anche se il tachimetro segna sempre lo
stesso valore perché non sta accelerando in intensità. Poiché il secondo principio pre-vede che possa aver luogo un’accelerazione unicamente in presenza di una forza, ne deduciamo che nel moto circolare occorre una forza anche solo per cambiare ogni istante la direzione alla velocità. Come vedremo nel dettaglio, si tratta di una forza in direzione radiale, che punta sempre verso il centro della circonferenza: ne sono esempi la forza normale esercitata da un binario curvo, oppure la tensione di una corda legata al centro della circonferenza. Nella figura a lato, là dove il binario (in un piano orizzontale) si interrompe, la pallina prosegue con un moto in linea retta lungo la direzione tangenziale istantanea, dato che è venuta meno la forza normale che la costringeva a curvare. Allo stesso modo, è rettilinea la traiettoria seguita da una pallina che gira su di una circonferenza legata a una corda, quando la corda vie-ne tagliata. È, infatti, impossibile che una sola azione iniziale imprima a un corpo un moto curvilineo: le traiettorie curve in figura sono una credenza ingenua. Perché non esiste una “forza centrifuga”? Come sappiamo dalla terza legge della dinamica, non esistono forze solitarie, ma soltanto interazioni fra coppie di oggetti. Ogni forza deve avere due “attori”: un soggetto che la esercita (e che a sua volta subisce un’azione uguale e contraria), e uno che la subisce. Ora, è nota a tutti la sensazione (illusoria) di essere scagliati verso l’esterno, in direzione radia-le, quando la nostra auto percorre un arco di curva. Ma si deve escludere che questa sen-sazione sia dovuta all’azione di una forza, semplicemente perché non esiste alcun soggetto che esercita questa forza. Chi esercita la “forza centrifuga”? Non c’è risposta a questa do-manda. Un passeggero su di un’auto in curva crede di essere tirato verso l’esterno, ma in realtà mantiene soltanto la stessa direzione di velocità, che come abbiamo detto è in ogni istante tangente alla traiettoria circolare. Se non ci fosse l’auto, egli volerebbe in direzione tangenziale non appena inizia la curva. Nel frattempo invece, la macchina gli si muove sotto e intercetta continuamente la sua traiettoria rettilinea forzandolo verso il centro. Come si vede in figura, lo spostamento dell’auto crea una valutazione errata, per cui egli pensa di essere scagliato verso l’esterno, e invece non sta seguendo affatto la direzione radiale istantanea. Il meccanismo è lo stesso di quando l’auto frena, ed il passeggero prosegue il moto in avanti con la medesima velocità di prima della frenata. Analogamen-te, quando l’auto accelera, al passeggero sembra di essere tirato indietro, ma sta solo pro-seguendo con la velocità che possedeva prima, mentre è l’auto ad aver cambiato stato di moto. Questa tendenza a proseguire il moto in direzione tangenziale è responsabile fra le altre cose, del rigonfiamento della circonferenza del nostro pianeta all’altezza dell’equatore, dove la velocità di rotazione è massima. Analogamente è il principio usato dalla “centrifuga” di una lavatrice per asciugare i panni. Come si vede dal disegno però, le goccioline di acqua non scappano in direzione radiale ma tangenziale, mentre il cestello continua a ruotare. Infine consideriamo che se nel riferimento in cui vediamo il corpo ruo-tare1 ci fosse una forza centrifuga, questa potrebbe annullare la forza in direzione radiale e
1 In realtà la cosiddetta forza centrifuga viene introdotta quando studiamo il problema del moto circolare nel riferimen-to in cui il corpo non sta ruotando, un approccio che qui non interessa.
goccia
xT
W
T
"forza centrifuga"
yT
v
direzioneradiale
istantanea
v
v
v
N
N
NO
SI
NO SI
'visto dall alto

129
così l’oggetto, in base a quanto previsto dalla seconda legge della dinamica, in quanto sot-toposto a forza nulla dovrebbe procedere in linea retta e non lungo una circonferenza! E’ necessaria una forza anche lungo la direzione istantanea della velocità? Immaginiamo la pallina di una roulette lanciata dal croupier. Inizialmente la pallina stava ferma, quindi la mano del croupier ha dovuto esercitare una forza per portarla fino ad avere velocità v . Come sappiamo dalla seconda legge della dinamica, da quel momento in poi, in assenza di qualsiasi attrito, non è più necessaria una forza nella direzione istantanea di v
per mantenere la sua intensità | |v costante. D’altro
canto non possiamo nemmeno escludere che una tale forza ci sia: ad esempio quando un’auto percorre una curva, può farlo con velocità di modulo costante, ma anche ac-celerando in intensità. Allo stesso modo, quando tentiamo di produrre con la mano il moto circolare in un peso agganciato ad una corda, dobbiamo prima metterlo in mo-to, esercitando una forza nella direzione della velocità. Poi compiamo due azioni: mantenendo ferma la mano tiriamo la corda in modo da costringere il peso a descri-vere la circonferenza, e ogni tanto dovremo pure dare un colpetto nella direzione della velocità per compensare l’azione degli attriti e della gravità, che tendono a far diminuire l’intensità della velocità da noi inizialmente impressa. Nel seguito ci occu-peremo della cinematica del moto circolare in cui l’intensità della velocità rimane co-stante, che chiameremo moto circolare uniforme. Nel moto circolare uniforme, a essere costante è dunque solo | |v
, mentre v cambia ogni istante direzione. Come possiamo ricavare l’accelerazione lungo la direzione radiale? Preso un punto in moto circolare uniforme di raggio r , consideriamo un arco di cir-conferenza AB, e l’intervallo di tempo tD che occorre al punto per percorrerlo. In questo stesso tempo il raggio della circonferenza avrà “spazzato” l’angolo J e la ve-locità avrà cambiato direzione passando da Av
a Bv . Poiché sia Av
che Bv sono per-
pendicolari al raggio, se li riportiamo con un’origine comune, è immediato conclude-re che anche la velocità ha spazzato lo stesso angolo J . Dal metodo di punta-coda per la somma dei vettori si riconosce subito che il vettore vD
che unisce le punte di
Av e Bv
è il vettore differenza, cioè si ha A Bv v v+D = , da cui B Av v vD = -
. Con-sideriamo ora il triangolo delle velocità e il triangolo AOB: sono entrambi isosceli e con un angolo uguale, pertanto sono simili:
| | | |
| |
v s
v r
D D=
Dividiamo per tD ambo i membri e riordiniamo:
| | | | | |v v s
t r t
D D= ⋅
D D
Quando l’intervallo tD tende a zero, sappiamo che il rapporto /| |s tD D diviene il
modulo della velocità istantanea | |v , mentre il rapporto /| |v tD D
, che rappresenta il modulo dell’accelerazione media, diventa il modulo dell’accelerazione istantanea.
Esercizi 1. La velocità di una particella in moto circolare uniforme, subisce nell’intervallo
s0.0010tD = una variazione tale che il modulo del vettore vD risulta
m/s| | 0.010vD = . Calcolare l’accelerazione media.
Risulta: / / m/s m/s2 2| | (0.010 0.0010) 10v tD D = = .
La direzione dell’accelerazione istantanea si mantiene sempre parallela a vD e così
alla fine risulta perpendicolare a v . Infatti, nel triangolo delle velocità, quando
0J si ha 90a , dovendo la somma rimanere uguale a 180 . La chiamiamo
Av
Bv
A
B
J
O
rsD
v
?F
F
Av
BvvD
Ja
Bv
Av 0J
90a
vD
Cav

130
quindi accelerazione centripeta Ca , in quanto diretta lungo il raggio puntando verso il
centro. Sostituendo nella relazione precedente /| |v tD D con | |Ca
e /| |s tD D con
| |v si trova che l’intensità dell’accelerazione centripeta vale:
2| || |C
va
r=
Esercizi 2. In un piano orizzontale, una pallina di massa kg0.0500m = è lanciata in una guida circolare di raggio m0.200r = e percorre un giro in s1.45 . Assumendo che il modulo della velocità sia rimasto costante durante il giro, calcolare l’accelerazione centripeta della pallina e la forza normale esercitata su di lei dalla guida. Troviamo innanzitutto il modulo della velocità:
m/s m/ss
2 6.28 0.200| | 0.866
1.45 1.45
rv
p ´= = =
Fissiamo un riferimento sul piano con l’origine nel centro della circonferenza e con-sideriamo l’istante in cui la pallina taglia l’asse delle ascisse come in figura. In dire-zione orizzontale agisce la forza normale, mentre l’accelerazione vale 2( | | / ; 0 )a v r
:
N N2 2| | 0.866
0.0500 0.1870.200x x x
vN ma N m
r
æ ö÷ç ÷ç= = = ´ =÷ç ÷ç ÷çè ø
e per l’accelerazione centripeta si ha:
m/s m/s2 2
2 2| | 0.866| | 3.75
0.200C
va
r= = =
Cosa s’intende con il termine “forza centripeta” ? Se una particella di massa m segue un moto circolare uniforme di raggio r , lungo la direzione radiale istantanea la seconda legge della dinamica si scrive:
2| |r
vF m
r=å
Si chiama forza centripeta la somma delle componenti in direzione radiale rFå di
tutte le forze che agiscono su di una particella in moto circolare.
Non si tratta quindi di un nuovo tipo di forza, ma solo del nome che sinteticamente si assegna alla risultante delle forze che producono l’accelerazione centripeta. Nel pre-cedente esempio la forza centripeta è fornita dalla normale alla guida, in questo caso l’unica ad agire sulla pallina in direzione radiale. Riflettiamo sul fatto che la forza normale è una forza passiva, che è in grado di fornire sempre il valore che occorre per costringere l’oggetto a percorrere la traiettoria circolare di quel raggio con quella velocità. Se ad esempio il modulo della velocità raddoppiasse, la guida dovrebbe fornire una forza centripeta / /2 2(2 | |) 4 | |m v r m v r=
quattro volte più grande, e co-sì via finché la forza richiesta non divenisse così intensa da piegare la guida stessa. E’ quanto accade ai treni che deragliano per aver tentato di percorrere le curve a ve-locità superiore al massimo che il binario poteva sopportare senza deformarsi. Esercizi 3. Una massa m , legata al capo di una fune, viene fatta ruotare da un uomo sopra alla sua testa. La massa descrive una circonferenza orizzontale di raggio m1.30R =
La Controfisica A volte viene detta “forza centrifuga”. la forza che fa coppia azione e rea-zione con la forza centripeta che agi-sce sull’oggetto. Va però osservato che una tale forza non appartiene allo schema di corpo libero dell’oggetto che gira, ma, se ad esempio abbiamo una mas-sa che gira legata ad una corda, appar-tiene a quello della corda che la fa girare. Quindi non va confusa con le forze che agiscono sull’oggetto. Lo schema di corpo libero della corda con-templa due azioni, quella appunto dovuta all’oggetto, ed il vincolo del perno centrale. Poiché ogni punto della corda si muove di moto circola-re, la somma di entrambe fornisce la forza centripeta che agisce sulla corda. L’aggettivo “centrifugo” è però abu-sivo, infatti, chi ha detto che l’oggetto che la subisce si stia muovendo di moto circolare? Il centro della corda lo fa, ma pensiamo invece alle rotaie di un treno in curva, che esercitano su di esso una forza centripeta. La forza di reazione che il treno esercita sulle ro-taie non può in nessun caso definirsi centrifuga perché le rotaie sono im-mobili. Centrifuga significa infatti “in fuga dal centro della traiettoria circola-re”. Se un corpo è immobile, di quale traiettoria circolare si parla? Di quella del treno? Ma la traiettoria di un og-getto non ha nulla a che vedere con la direzione delle forze cha agiscono su di un altro.
v
rN
W
RT
a
v
Ca
N
x
y

131
e la corda forma sempre uno stesso angolo a con la verticale. Sapendo che la veloci-tà costante di rotazione è m/s8.50 , calcolare a . La forza centripeta Cma
è orizzontale, diretta verso il centro della circonferenza (che si trova sulla retta verticale passante per la mano dell’uomo), ed è prodotta dalle due forze che agiscono sulla massa, cioè la tensione ed il peso, sommate vettorialmente, come si vede applicando la seconda legge in forma vettoriale:
CT W ma+ =
Dal metodo di punta coda risulta poi che i tre vettori W
ed Cma sono cateti di un
triangolo rettangolo in cui T
è ipotenusa. Come sappiamo, in un triangolo rettango-lo il rapporto fra la misura | |Cm a
del cateto opposto ad a e la misura | |W
del cateto adiacente ad a fornisce la tangente goniometrica dell’angolo:
/2 2 2| | | | | | 8.50tan 5.67
1.30 9.81| |Cm a m v R v
mg RgWa = = = = =
´
1tan (5.67) 80.0a -= =
Come si vede dall’esempio precedente, la forza centripeta può avere le origini più diverse: la tensione di una corda combinata vettorialmente al peso, produce la forza centripeta quando si fa ruotare una massa ad un suo capo. Analogamente, la forza di gravità funge da forza centripeta per tenere la Luna in orbita attorno alla Terra, e l’attrito statico fra pneumatici ed asfalto fornisce la forza centripeta che serve per far percorrere all’auto una curva. In quest’ultimo caso quindi, osservando il disegno a lato avremo che l’attrito statico agirà sulla ruota, oltre che nel verso di avanzamento, anche in direzione radiale, puntando verso il centro istantaneo della curva. È impos-sibile quindi far curvare un mezzo con pneumatici su di una superficie priva di attri-to come quella di un lago ghiacciato.
Esercizi 4. Una massa kg0.600m = agganciata al capo di una fune lunga m0.500 viene fat-ta ruotare in un piano verticale, imprimendogli nel punto più in basso una velocità
m/s| | 5.00v =
. La traiettoria è circolare ma il modulo della velocità non rimane co-stante in quanto la massa è rallentata dalla gravità mentre sale ed è accelerata mentre scende. Sapendo che nel punto più in alto risulta m/s| | 2.32v =
, si calcolino la for-
za centripeta, l’accelerazione centripeta e la tensione della fune nelle posizioni di massima e minima altezza. Nella posizione di minima altezza abbiamo, lungo l’asse y (che in quel momento coincide con la direzione radiale):
2| || |y y y
vT W ma T mg m
r+ = - =
( ) N N2
25.000.500
| || | 0.600 9.81 0.600 35.9
vT mg m
r= + = ´ + ´ =
mentre la forza centripeta e l’accelerazione centripeta valgono: N N(35.9 0.600 9.81) 30.0rF T mg= - = - ´ =å
m/s m/s2 2
2 2| | 5.00| | 50.0
0.500C
va
r= = =
( )m/s250.0ya =
Nel punto di massima altezza abbiamo, sempre lungo la direzione radiale y : 2| |
| |y y y
vT W ma T mg m
r+ = - - = -
T
y
W
T
W
y
sf
sf
centrodellacurva
WT
a
Cma
Cma

132
( ) N N2
22.320.500
| || | 0.600 0.600 9.81 0.573
vT m mg
r= - = ´ - ´ =
mentre la forza centripeta e l’accelerazione centripeta valgono: N N| | ( 0.573 0.600 9.81) 6.46rF T mg=- - = - - ´ = -å
m/s m/s2 2
2 2| | 2.32| | 10.8
0.500C
va
r= = =
( )m/s210.8ya = -
Riflettiamo sul fatto che la tensione della corda non coincide con la forza centripeta, ma anzi | |T
aggiusta il suo valore facendosi minima quando è aiutata dalla gravità
nel produrre la forza centripeta, come accade nel punto più alto, e facendosi invece massima quando è contrastata dalla gravità nel produrre la forza centripeta, come accade nel punto più basso. 5. Un’auto segue una strada curva procedendo a velocità di modulo costante | |v
. Si calcoli il modulo della sua accelerazione nei tratti AB, BC, CD, DE specificando dove è massimo e dove minimo. [R] 6. Un’automobile di massa kg1500m = percorre una curva circolare di raggio
m40.0r = alla velocità di m/s15.0 . Si calcoli la forza centripeta. Sapendo poi che il coefficiente di attrito statico fra pneumatici ed asfalto è 0.950sm = , si calcoli la mas-sima velocità alla quale l’auto può percorrere la curva e la forza centripeta in questo secondo caso. [R: N40.844 10´ , m/s19.3 , N41.40 10´ ]
7. Un’automobile di kg1300m = , in viaggio a velocità costante di m/s10.5 , passa su di un dosso il cui profilo è una circonferenza di raggio m15.0R = . Si dica, sen-za svolgere alcun calcolo, se quando l’auto raggiunge la sommità, la forza normale esercitata dal terreno è maggiore, minore od uguale al peso della vettura. Si calcoli-no quindi le intensità della forza centripeta e della forza normale in quel momento. [R: N N3 39.56 10 , 3.20 10´ ´ ]
8. Una pallina di massa kg0.300m = , appesa a un filo lungo m0.750L = , gira a velocità di modulo costante descrivendo una circonferenza, mentre l’angolo che il filo forma con la verticale rimane sempre 25.0a = . Si trovi la tensione del filo, l’intensità della forza centripeta e dell’accelerazione centripeta, ed il tempo che oc-corre alla pallina per completare un giro. [R: N N m/s m/s s23.25 ,1.37 , 4.57 ,1.20 ,1.66 ]
9. Sopra ad un piano, fissata ad una corda, una massa kg0.450m = descrive un mo-
to circolare uniforme di raggio m0.500r = con velocità m/s2.50v =
. All’altro
capo della corda pende immobile, da un foro ricavato al centro del piano, una secon-da massa M . Si trovi il valore di M . [R: kg0.574 ] 10. Nello spazio siderale una sonda di massa kg2500m = che procede in linea retta a
m/s70.0 deve curvare descrivendo un arco di circonferenza di raggio km1.50R = sen-za variare l’intensità della velocità. Calcolare la spinta che dev’essere esercitata lateral-mente dai razzi del motore. [R N38.17 10´ ]
R
L
a
M
m
m
R
N
W
sf
x
y
N
W
R
y
R
3
4R
1
3R
A
BC
D
E

133
11. Un’automobile di massa m tenta di eseguire il “giro della morte” lungo una pi-sta circolare di raggio R . Si trovi la velocità minima av
con la quale deve arrivare nel punto più alto della pista, riflettendo sul fatto che a fornire la forza centripeta necessaria in quel punto sono la normale alla pista e la gravità. [R: gR ] 12. Un’automobile di massa m percorre una curva di raggio m150R = alla velocità di m/s15.0 . Sapendo che la strada è inclinata ed indicato conJ l’angolo che essa forma con l’orizzontale, si trovi il valore di J che permette all’auto di percorrere la curva anche in assenza di attrito fra pneumatici ed asfalto. [R: 8.69 ] 13. Un disco ruota su di un piano orizzontale compiendo giri/min33 . Ad una di-stanza di cm25.0 dal centro viene appoggiato un blocchetto di massa m . Sapendo che il coefficiente di attrito statico fra blocco e disco vale 0.150sm = si dica se il bloc-chetto scivola. [R: si] 14. Si determinino velocità ed accelerazione centripeta di un punto sulla superficie terre-stre che si trovi alla latitudine italiana, sapendo che m66.378 10TR = ´ .
[R: m/s m/s2 2344 ,2.50 10-´ ]
15. Un ponte sospeso forma un arco di circonferenza incurvato verso il basso, di raggio
m200R = . Sul cartello di avvertimento si legge che il ponte sopporta al massimo un ca-rico di N41.50 10´ . Quale limite di velocità deve rispettare un’automobile di massa
kg1200 se vuole attraversare il ponte senza che questo si rompa? [R: m/s23.2 ]
16. Una sfera di massa kg1.25m = viene fatta scivolare lungo una guida circolare di raggio m3.00R = , sul cui punto più basso è inserita una bilancia. Sapendo che al passaggio della sfera la bilancia segna kg3.75 , si calcoli la velocità dell’oggetto in quell’istante. [R: m/s7.67 ] 17. Un blocco di massa m , scivola lungo un igloo semisferico di raggio R , partendo dal punto più alto con una velocità piccola, praticamente nulla. Se l’igloo non ci fos-se, il blocco seguirebbe sin dall’inizio una traiettoria parabolica di caduta libera, che si troverebbe nello spazio occupato dal ghiaccio. A mano a mano che procede la di-scesa, questa traiettoria ipotetica si va aprendo sempre più perché aumenta l’intensità della velocità con cui la caduta libera dovrebbe avere inizio. Nell’istante in cui la parabola diventa tutta esterna all’igloo, il blocco non viene più premuto contro il ghiaccio e così si stacca. Calcolare la velocità in quell’istante. [R: cosRg a ] Qual è la direzione dell’accelerazione nel caso più generale? Poniamo di avere un punto che si muove su una traiettoria curvilinea in due dimensioni.
v
a
v
a
v
a
v
a
Sf
cm25
N
x
y
J
W
R
0v
a
N
0N = N
RW
N
W
R
W
N
TW
R
v
R
bilancia

134
Il vettore velocità è, per definizione, sempre tangente alla traiettoria e quindi, in ogni istante, cambia direzione. Nel caso generale anche il modulo della velocità cambia in ogni istante. Possiamo vedere tale situazione come una combinazione dei casi elementari che conosciamo. Poiché la velocità è per definizione un vettore sempre tangente alla traietto-ria, la variazione del modulo della velocità deve essere dovuta a un vettore accelerazione anch’esso nella direzione tangente, che ci dice di quanto deve essere allungato od accor-ciato il vettore velocità ogni secondo. La variazione della direzione della velocità è invece riconducibile alla presenza di un vettore nell’accelerazione perpendicolare alla traiettoria, proprio come accade nel moto circolare uniforme. Come si è visto in quel caso, infatti, un’accelerazione perpendicolare alla velocità non ne modifica mai il modulo, ma la fa solo ruotare. Pertanto in generale il vettore accelerazione a lungo una traiettoria curva sarà composto da un’accelerazione tangenziale Ta
e da un’accelerazione normale (o centripeta) Ca e
causa di quest’ultima punterà sempre verso la regione dove la traiettoria la sua concavità.
Possiamo approssimare la traiettoria in ogni punto con una circonferenza? L’accelerazione centripeta è dunque responsabile del cambiamento di direzione della veloci-tà istantanea anche su una traiettoria qualunque. Possiamo pensare ad essa come all’accelerazione centripeta che avrebbe la nostra particella se si stesse movendo, anziché lungo la traiettoria reale, lungo quella circonferenza che meglio vi combacia intorno al punto dove stiamo osservando il moto. Una tale circonferenza, detta circonferenza oscula-trice2, si individua per ciascun punto P della traiettoria, considerato che, presi 1P e 2P in
prossimità di esso, come in figura, per i tre punti non allineati P , 1P e 2P passa una sola circonferenza. La circonferenza osculatrice nel punto P si ottiene come posizione limite, facendo avvicinare sempre più 1P e 2P a P . Il suo raggio è detto raggio di curvatura della traiettoria in quel punto. Come s’intuisce, la circonferenza osculatrice sarà sempre “ab-bracciata” dalla traiettoria con la quale deve combaciare, cioè si troverà sempre nella re-gione di piano dove la curva rivolge la sua concavità. Ecco perché è sempre verso tale re-gione che punta la componente normale dell’accelerazione e di conseguenza anche l’accelerazione complessiva. Che relazione c’è con l’accelerazione studiata per il moto rettilineo? La componente tangenziale dell’accelerazione, invece, è responsabile della variazione del modulo della velocità, ed ha lo stesso significato che ha l’accelerazione istantanea nel mo-to rettilineo, purché si sostituisca la coordinata rettilinea con un’ascissa curvilinea ( )s t
lungo la traiettoria. In generale se l’angolo fra velocità e accelerazione complessiva è acu-to, significa che l’accelerazione tangenziale ha lo stesso verso della velocità e quindi il mo-dulo della velocità sta aumentando. Viceversa, quando l’angolo fra accelerazione e veloci-tà è ottuso allora l’accelerazione tangenziale punta contro il verso della velocità, quindi il modulo di quest’ultima sta diminuendo. Ad esempio si consideri il moto di un pianeta che segue un’orbita avente la forma di una curva ovale chiusa detta ellisse, in cui l’accelerazione è sempre diretta verso la posizione del Sole, da cui proviene la forza. Tale accelerazione fa variare la velocità in modo che essa cresca col diminuire della distanza dal Sole. Come si vede dalla figura, l’angolo fra a e v è, infatti, acuto nella fase in cui il
2 Dal latino osculo, baciare. La circonferenza, cioè, che meglio combacia con la traiettoria in quel punto.
a
a
Ta
Ta
Ca
Taa
T
a
Ca
a
Ca
Ca
v
v
v
v
a
a
a
a
90 velocità
in aumentoa<
90 velocità
in diminuzionea>
a
a
( )s t
0s =
P
1P
2P1 2
P P P= =C
a
a
v
angolo acuto
a v
ottusoangolo

135
pianeta si porta verso il punto di massima vicinanza dal Sole (detto perigeo), dove la velo-cità è massima). Da qui esso si allontana verso il punto di massima distanza (apogeo) e in questa fase l’angolo fra a e v è ottuso e la velocità diminuisce in modulo fino a raggiun-gere il valore minimo, poi il moto prosegue ciclicamente. Esercizi 18. In figura è rappresentata la traiettoria di un punto materiale. Si dica se è possibile che i vettori accelerazione e velocità istantanea abbiano i versi riportati. La situazione proposta non è possibile, perché il vettore velocità deve essere sempre tan-gente alla traiettoria e il vettore accelerazione sempre orientato verso la parte del piano dove la traiettoria rivolge la sua concavità. 19. Qui a lato è riportato l’andamento in funzione del tempo della velocità di un punto materiale. Si stabilisca se sulla traiettoria seguita dal punto, l’angolo fra l’accelerazione e la velocità è acuto oppure ottuso. [R] 20. L’ascissa curvilinea del moto di un punto materiale su di una traiettoria curva ha legge oraria espressa dalla parabola 2( ) 3 2s t t t= - + . Dopo averne rappresentato il grafico, se ne osservi la pendenza e quindi si dica per quali valori del tempo l’angolo fra la velocità l’accelerazione è acuto e per quali è ottuso. [R: : s1.50ottuso t < ]
2. Periodo, frequenza e velocità angolare
In natura sono molto frequenti dei fenomeni che si ripetono con uguali caratteristiche: le oscillazioni di un pendolo, l’alternanza di giorno e notte, il moto orbitale di un pianeta, la nostra respirazione ed il battito del nostro cuore, le maree e così via. Questo tipo di mo-to è detto periodico.
Quali sono le caratteristiche di un moto periodico?
Una particella si muove di moto periodico quando continuamente ripassa per le stesse posizioni e in ogni punto assume sempre la velocità e l’accelerazione che ave-va al passaggio precedente.
Il più piccolo intervallo temporale dopo il quale il moto si ripete con le medesime ca-ratteristiche si chiama periodo del moto, e si indica con la lettera T . Diremo che du-rante un intervallo temporale pari al periodo viene completato un ciclo del moto. Il pe-riodo si misura tramite il rapporto seguente:
tempo trascorsonumero dei cicli svolti
T =
Infatti, dato che ogni frazione esprime il quantitativo del numeratore associato ad un’unità del denominatore, tale rapporto rappresenta i secondi associati ad un ciclo. Analogamente il suo reciproco:
numero dei cicli svoltitempo trascorso
f =
è il quantitativo di cicli associati ad una unità del denominatore, cioè i cicli (o la fra-zione di ciclo) eseguiti in un secondo, e prende il nome di frequenza, ed indicata con la
La ControfisicaAd esempio un pianeta che segue un’orbita avente la forma di una curva ovale chiusa detta ellisse, descrive un moto periodico in cui l’accelerazione è sempre diretta verso la posizione del Sole, da cui proviene la forza, ed ha in ogni preciso punto sempre lo stesso valore ad ogni nuovo giro. Tale accele-razione fa variare la velocità in modo che essa cresca col dimi-nuire della distanza dal Sole. Quindi sia velocità che accelera-zione cambiano di direzione ed aumentano e poi diminuiscono di intensità durante tutto il moto, però assumono sempre gli stessi valori quando il pianeta ripassa negli stessi punti dell’orbita.
v
t
a
v
v
a
v
v
v
a
a
a

136
lettera f . Il periodo si misura in secondi al ciclo, e nel Sistema Internazionale le sue unità di misura sono s[ ] , in quanto il numero di cicli non ha dimensioni fisiche. La frequenza si misura in cicli al secondo ed anche qui, essendo il numero di cicli una grandezza adimensionale, nel SI le unità di misura della frequenza risultano s 1[ ]- ,
a cui viene dato il nome di Hertz: Hz s 11 1 -= . In base alla definizione la frequenza è
il reciproco del periodo: 1
fT
=
Esercizi 21. In un moto periodico vengono compiuti 3 cicli in 5 secondi. Calcolare frequenza e pe-riodo.
tempo trascorsonumero dei cicli svolti
s s5
31.67T = = = numero dei cicli svolti
tempo trascorsos Hz13
50.600f -= = =
22. Il processore di un PC lavora con una frequenza di clock di GHz2.20
GHz Hz9(1 10 )= , cioè svolge 92.20 10´ operazioni binarie ogni secondo). Quanto
tempo impiega per eseguire un’operazione? [R: s90.455 10-´ ]
Il moto circolare a velocità uniforme è un particolare caso di moto periodico? Si, quello di un punto P che si muove lungo una circonferenza con velocità ed accelerazione d’intensità costanti. Ci serviremo ora di un nuovo strumento per individuare la posizione di P sulla circonferenza: l’angolo di rotazione J (theta) rispetto ad una semiretta di riferimento uscente dal centro C . In che modo conviene misurare gli angoli per descrivere un moto circolare? Come sappiamo, tutte le circonferenze sono simili fra loro, cioè il rapporto fra il perimetro ed il raggio produce in ogni circonferenza lo stesso numero 2 .pOsservazioni di geometria elementare ci indicano che questa proprietà vale, oltre che per l’intero perimetro, anche per una sua porzione, cioè la lunghezza di un arco di circonferenza. In questo caso però il valore del rapporto non è più 2p , ma un numero caratteristico di quell’angolo, cioè:
un angolo al centro J e la lunghezza s dell’arco da esso sotteso sono proporzionali
Pertanto il rapporto /s R , fra la lunghezza s dell’arco ed il raggio R , non dipende dalla misura del raggio, ad esempio assume lo stesso valore per tutte le circonferenze di centro C , come le due in figura. Fissato l’angolo J , il rapporto /s R può quindi essere assunto come misura dell’angolo, visto che non occorre specificare su quale delle infinite circonferenze concentriche viene misurato, dato che si ottiene sempre lo stesso valore. Questo modo di misurare si dice esprimere gli angoli in radianti:
rad s
RJ =
Il radiante è un numero adimensionale, essendo il rapporto di due grandezze che hanno le stesse dimensioni fisiche. Nel Sistema Internazionale, quando un numero esprime un angolo in radianti, si aggiunge il suffisso “rad”. L’angolo in radianti ha convenzionalmente segno positivo se misurato in verso antiorario, negativo se misurato in verso orario. Per quale motivo conviene misurare gli angoli in radianti? La misura in radianti consente di passare immediatamente dal valore dell’angolo alla misura dell’arco, quando sia noto il raggio R della circonferenza. Infatti:
La Controfisica Ad esempio un angolo di 1 radiante stacca su qualsiasi circonferenza un arco lungo quanto il raggio.
J
RRs J=
C
P
r

137
rads RJ=
e questa stessa relazione risulta meno semplice se gli angoli sono in gradi.
Esercizi 23. Si esprimano in radianti gli angoli di: 360 , 180 , 90 , 45 ,30 . Si dica poi quanto misurano gli archi staccati dall’angolo di 30 su di una circonferenza di raggio m2.50 e su una di raggio m6.70 .
Su di una circonferenza di qualunque raggio R , con centro nell’origine comune di questi angoli, misurando l’arco s partendo dal punto marcato in figura, è facile trovare l’espressione in radianti dell’angolo giro:
rad2360 2 2 6.28
s Rs R
R R
pp J p = = = = =
Per gli altri angoli le misure di s si trovano facilmente prendendo la frazione di perimetro corrispondente:
rad2180 3.14
2R s R
sR R
p pJ p = = = = =
/ rad2 290 1.57
4 2
R s Rs
R R
p p pJ = = = = =
/ rad2 445 0.789
8 4
R s Rs
R R
p p pJ = = = = =
/ rad2 630 0.524
12 6
R s Rs
R R
p p pJ = = = = =
Per avere la misura degli archi sottesi da / rad6 0.524J p= = sulle due circonferenze basta usare la formula inversa rads RJ= , da cui:
m m m2.50 (2.50 0.524) 1.31R s= = ´ =
m rad m6.70 (6.70 0.524) 3.51R s= = ´ =
24. Si trasformino in radianti gli angoli 270 , 135 , 60 . [R: /3 2p ; /3 4p ; /3p ]
Che cosa s’intende per velocità angolare di un punto? Dato un punto P in moto su una circonferenza, ed un intervallo tD durante il quale l’angolo di rotazione è variato di una quantità JD , è possibile definire:
velocità angolare media di un punto P in moto su di una circonferenza, è il mumero di radianti spazzati in un secondo, dal raggio che individua P:
t
JDD
Ricordando infatti la definizione di rapporto fra due grandezze come il “quantitativo al numeratore che è associato ad un’unità del denominatore”, la definizione appare subito trasparente. Se il rapporto viene calcolato nel caso limite in cui 0tD , cioè quando l’intervallo temporale si chiude attorno ad un singolo istante, la velocità angolare si dice istantanea. Il simbolo che si adopera per la velocità angolare, sia media che istantanea è la lettera greca òmega minuscola w , e si misura in rad/s . Si capisce che
/ tw J= D D è l’analoga angolare del rapporto /v s t= D D che dà la componente della velocità (media) del punto sulla circonferenza. La sua utilità appare evidente quando si ha a che fare con le rotazioni di un corpo esteso, rigido, attorno ad un asse. Consideriamo ad esempio il pianeta Terra: un punto sull’equatore ruota molto più velocemente di uno in prossimità del polo Nord, ma entrambi spazzano il medesimo angolo ogni secondo, cioè hanno la stessa velocità angolare (il cui valore è
rad/s57.27 10w -= ´ ), che quindi esprime una proprietà comune a tutto il corpo.
JD
R
s R JD = D
A
P
45 4p =
30 6p =
90 2p =
180 p =
360 2p =
0
/1670km h
/1466km h
/835km h30
60
rad/s57.27 10w -= ´

138
Come si esprime la velocità angolare se il moto è circolare uniforme? Nel caso in cui il moto sia circolare uniforme, il raggio che individua il punto spazza sempre lo stesso numero di radianti in un secondo e quindi non importa quale ampiezza JD si usi per calcolare il rapporto / tJD D , perché il risultato è sempre lo stesso valore costante. Decidiamo allora di fare il conto riferendoci ad un giro completo attorno all’asse. In questo caso il tempo impegato è il periodo t TD = del moto circolare, cioè il tempo che serve a completare il giro, e si ha:
2
T
pw = 1
2f
T
wp
= =
Dove f è il numero di giri eseguiti in un secondo, cioè la frequenza del moto circolare uniforme.
Esercizi 25. Calcolare periodo, velocità angolare e frequenza della punta della lancetta delle ore, di quella dei minuti e di quella dei secondi. La lancetta delle ore impiega h12 per completare un giro, quindi si ha:
s12 3600 43200hT = ´ =
/ rad/s / Hz4 52 1.45 10 1 2.31 10h h h hT f Tw p - -= = ´ = = ´
La lancetta dei minuti impiega h1 per completare un giro, quindi si ha:
s3600mT = / rad/s / Hz3 42 1.74 10 1 2.78 10m m m mT f Tw p - -= = ´ = = ´
La lancetta dei secondi impiega s60 per completare un giro, quindi si ha:
s60hT = / rad/s / Hz2 0.105 1 0.0167s s s sT f Tw p= = = =
In un moto circolare uniforme, che relazione c’è fra velocità angolare e velocità? Dalla definizione di radiante:
s R JD = D
cioè lo spazio che il punto percorre è tanto maggiore quanto più grande è la sua distanza dall’asse. Pertanto, essendo la componente della velocità sulla circonferenza
/v s t= D D (positiva se il moto è antiorario) risulta:
s vv R
t R t R
Jw w
D D= = = =
D D
In che modo possiamo scrivere ora l’accelerazione centripeta? Usando la relazione | |v Rw=
, le formule per l’accelerazione e per la forza centripeta posso no essere espresse in funzione della velocità angolare:
22| |
| |C
va r
rw= =
2
rF m rw=å
Esercizi 26. Calcolare la velocità angolare di rotazione del pianeta Terra, e la velocità lineare di un punto P alla latitudine italiana di 42 , assumendo per il raggio della Terra km6400 . [R: rad/s57.27 10-´ , m/s346 ] 27. Sapendo che il diametro interno di un vecchio disco in vinile da giri/min45 è
cm4.5Bd = , e che quello esterno è cm18Ad = , se ne calcoli la velocità angolare, e si trovino le velocità lineari dei punti A e B in figura. [R: rad/s4.71 , cm/s42 ,11 cm/s
La Controfisica La relazione trovata v=ωR è facilmen-te verificata quando si ha un corpo rigido che ruota attorno ad un asse, ad esempio un disco. Tutti i punti del corpo hanno la stessa velocità angola-re dato che spazzano un uguale angolo nello stesso tempo. Però tanto mag-giore è la distanza dall’asse (cioè il raggio R della traiettoria) tanto più
veloce deve andare il punto, essendo costretto a descrivere una circonfe-renza di raggio maggiore nello stesso tempo.
A
B
42
P

139
x
0xF kx=- >
0xF =
0xF kx=- <
xx
x
0
0
0
28. Un’automobile avanza con velocità m/s| | 20V =
. Sapendo che il raggio della ruota è m0.40R = , si dica quanto valgono: l’intensità | |v
della velocità di un punto sul perime-tro della ruota, la velocità angolare e la frequenza di un punto qualsiasi sulla ruota. [R: m/s20 , rad/s50 , 8.0 Hz ]
3. Il moto armonico Cosa è la forza elastica?
Si dice forza elastica qualsiasi forza F
di richiamo, cioè sempre diretta verso una po-sizione di equilibrio, e la cui intensità, variabile nel tempo, sia direttamente proporzionale alla distanza da tale posizione. Indicato con x
il vettore spostamento che ha la coda nel punto di equilibrio e la punta nella posizione istantanea della particella, si ha dunque che la forza elastica può essere scritta:
F kx= -
dove la costante che figura è 0k > e le sue unità di misura sono N/m[ ] , in modo che quando viene moltiplicata per una lunghezza si producano newton al primo mem-bro dell’equazione. L’intensità della forza vale | | | |F k x=
, ed è quindi tanto mag-giore quanto più è grande la distanza dall’equilibrio, e quando la massa si trova nel-la posizione di equilibrio la forza vale zero essendo | | 0x =
. Il segno negativo
nell’equazione F kx= - indica come la direzione della forza sia sempre parallela e
contraria al vettore x , e quindi orientata verso la posizione di equilibrio. Il numero k si dice costante elastica. Come possiamo realizzare una forza elastica? Dopo aver bloccato il capo di una molla a forma di elica, si attacchi una massa all’altro capo, e la si ponga in un piano orizzontale senza attrito. La massa della molla sia trascurabile rispetto a quella attaccata. Esiste una sola distanza del capo li-bero dal punto di aggancio nella quale la molla è rilassata. Non appena si tenti di al-lontanare la massa da questo equilibrio, la molla tende a riportacela. Le osservazioni mostrano che il valore della forza di richiamo dipende dalla natura della molla, ma che in ogni caso F
si fa tanto più intensa quanto maggiore è l’allontanamento x
dalla posizione di equilibrio, dove la forza vale zero: si tratta quindi di una forza ela-stica. La costante elastica determina la rigidità della molla: a parità di deformazione, una molla con k grande è più rigida (cioè esercita una forza maggiore) rispetto ad una molla con k piccolo. Posto un asse di riferimento con l’origine nella posizione di equilibrio ed indicata con xF la componente orizzontale della forza, lungo di esso
risulta xF kx= - , una relazione detta legge di Hooke. Una forza verso sinistra avrà quindi componente positiva, e questo accade se la molla viene compressa e cioè quando 0x < . Per una molla allungata avremo viceversa 0xF < ed 0x > . Esercizi 29. Una molla tirata da una forza d’intensità N| | 30.0F =
si allunga di cm5.00 .
Calcolarne l’allungamento se viene posta in verticale e ad essa agganciato un bloc-chetto di massa kg0.750m =
La ControfisicaPer quanto possa suonare strano, un elastico non esercita una forza elastica nel senso della definizione qui data. Infatti pur essendo in grado di tirare verso l’equilibrio, non esiste una configura-zione in cui spinga. Il meccanismo nasce dalla presenza di lunghe catene di molecole al suo interno, che non riescono a stare stirate ma tendono ad assumere forma contorta, e per questo ad accorciarsi. Queste molecole fili-formi sono costrette ad assumere una geometria ripiegata a causa del conti-nuo picchiettare laterale dovuto al moto di agitazione termica di moleco-le più piccole.
F.EqF
x
x
V
v

140
Troviamo innanzitutto la costante elastica della molla:
N/m N/m2
| | 3.0060.0
| | 5.00 10
Fk
x -= = =
´
Posta in verticale la molla si allunga di un tratto lungo | |x tale che la forza elastica
corrispondente bilancia il peso del blocchetto:
m m cm| | 0.750 9.81| | | | | | 0.123 12.3
60.0
W mgk x W x
k k
´= = = = = =
30. Lungo un piano inclinato di un angolo 35a = come in figura, privo di attrito, è adagiata una molla di costante elastica N/m21.50 10k = ´ avente all’estremità una
massa kg1.70m = . Si dica di quanto si allunga la molla. [R: cm6.38x = ]
31. Lungo un piano inclinato di un angolo 25a = , privo di attrito, è adagiata una molla di costante elastica N/m22.00 10k = ´ avente all’estremità una massa kg2.10m = . Si
dica di quanto viene compressa la molla. [R: cm4.35x = - ] 32. Una massa kg1.30m = attaccata ad una molla con N/m24.00 10k = ´ viene tirata da un nastro trasportatore. Sapendo che il coefficiente di attrito statico fra le superfici è
0.840Sm = , si trovi il massimo allungamento. [R: cm2.68x = ] 33. Si consideri la situazione di equilibrio in figura: sapendo che le tre molle sono uguali ed hanno N/m22.50 10k = ´ e che kg1.20m = , trovare l’allungamento D di ciascu-
na. [R: cm cm1 2 34.71 , 3.07D = D = D = ] 34. Una massa kg3.50m = viene legata fra due molle verticali in modo che la distanza fra i capi agganciati sia pari alla somma delle loro lunghezze a riposo, che è la stessa per entrambe. Si calcolino di quanto si allungano le due molle sapendo che
N/m21 1.20 10k = ´ e che
N/m2
2 2.60 10k = ´ . [R: cm1 2 9.21D = D = ]
Che cos’è il moto armonico?
Si dice moto armonico quel particolare moto periodico che si ottiene quando una par-ticella è sottoposta ad una forza elastica.
Le oscillazioni della massa attaccata alla molla ne sono un esempio. La massima di-stanza dalla posizione di equilibrio è chiamata ampiezza A del moto. Molti sono i sistemi fisici che seguono naturalmente il moto armonico: dalle vibrazioni degli ato-mi attorno ai siti di equilibrio, fino alle oscillazioni dei pennoni delle bandiere ed ad-dirittura le oscillazioni dei grattacieli. Che legame esiste fra moto armonico e moto circolare uniforme?
E’ possibile pensare al moto armonico come alla proiezione sull’asse delle ascisse (o delle ordinate, è lo stesso) della posizione di una particella che si muova di moto cir-colare uniforme
Presa quindi una traiettoria circolare di raggio pari all’ampiezza A del moto armo-nico, è possibile individuare una velocità di intensità | |v
opportuna, per cui la posi-zione della particella che oscilla legata all’estremità della molla coincide in ogni istante con l’ombra di un’altra particella che gira sulla circonferenza con velocità di modulo | |v
costante. Infatti, indicata con F
la forza centripeta all’origine del moto
a
a
attritostatico
f
50
m
50
1
2 3
1
2
m
F
xA+-A 0
cosA J
xF
J

141
circolare - qualunque ne sia natura - la sua componente xF lungo l’asse orizzontale risulta:
| | cosxF F J= -
ed essendo /2| | | |F m v A= , ed inoltre /cos x AJ = come si vede dal triangolo in fi-
gura, si ottiene: 2| |
x
v xF m kx
A A= - ⋅ = -
avendo indicato il prodotto di tutte le quantità costanti con un unico simbolo:
/2 2| |k m v A= . Abbiamo così dimostrato che la componente della forza lungo l’asse
orizzontale è una forza di richiamo di tipo elastico. Poiché in un moto circolare uni-forme risulta | | ( )v R Aw w= =
, la velocità angolare w del moto circolare la cui proie-zione genera il moto armonico di costante k , risulta legata alla costante elastica dalla relazione:
2
2 2
m mk v
A A= =
2A 2 k
mw w =
Quando ci si riferisca al moto armonico, il valore di w viene detto pulsazione del moto, sempre misurata in rad/s. Il periodo del moto armonico è lo stesso del moto circolare uniforme che lo genera, il quale completa un giro nel tempo in cui la sua proiezione ha completato un’oscillazione. Il periodo del moto armonico è uguale a quello del moto circolare corrispondente. Ricordando che per il moto circolare uni-forme vale la relazione /2T p w= , sarà :
2m
Tk
p=
Notare che la frequenza (e quindi T ed w ) non dipendono dall’ampiezza A del moto.
Esercizi 35. Si osserva che una massa kg2.30m = attaccata ad una molla oscilla sedici volte in
s2.00 . Trovare la costante elastica della molla e la forza che essa esercita sulla massa
quando questa si trova cm4.00 a destra del punto di equilibrio
Il periodo e la pulsazione di questo moto armonico risultano essere:
s s rad/s rad/s2.00 2 6.280.125 50.2
16 0.125T
T
pw= = = = =
si ricava quindi la costante elastica:
N/m N/m2 2 32.30 50.2 5.80 10k
k mm
w w= = = ´ = ´
Se la massa dista cm m24.00 4.00 10x -= = ´ , la componente della forza vale:
N N3 25.80 10 4.00 10 230xF kx -= - = - ´ ´ ´ = -
negativo in quanto diretta verso sinistra dove si trova la posizione di equilibrio. 36. Una molla posta in verticale con appesa una massa kg0.850m = si allunga di
cm15.0 rispetto alla posizione di equilibrio. Trovare il periodo delle oscillazioni che la
massa compie in un piano orizzontale. [R: s0.776 ]
A
x
Jy
cm4.000
cm15.0ìïïíïïî
W
elF

142
37. Al centro di un piatto orizzontale privo di attrito, che compie 33 giri/min, è saldata una molla di lunghezza a riposo 30.0 cm al cui capo libero è agganciata una massa m =
2.40 kg. Osservando che in queste condizioni la molla si allunga di 2.00 cm, si calcoli il pe-riodo delle oscillazioni di cui è capace il sistema della molla con la massa. [R: s0.455 ] Quale equazione esprime lo scostamento dall’equilibrio in un moto armonico? Lo scostamento dall’equilibrio si ottiene tramite la legge oraria della posizione, ( )x t , in un riferimento dove l’equilibrio corrisponde ad 0x = . Indichiamo con J l’angolo complessivamente spazzato, rispetto ad una retta di riferimento, partendo dall’istante iniziale, in cui assumiamo che esso valeva zero. Sapendo che la velocità angolare è data dal rapporto fra J ed il tempo impiegato, /tw J= , si ottiene la leg-ge oraria dell’angolo per il moto circolare uniforme, (nel caso particolare in cui l’angolo iniziale è nullo):
tJ w= Con riferimento all’asse delle ascisse nella precedente figura si ha che:
( ) cos cosx t A A tJ w= =
Se invece la particella che gira comincia da un angolo iniziale che non è nullo, ma che già vale 0J , questo va sommato ad tw , cioè 0 tJ J w= + , e risulta:
legge oraria della posizione per il moto armonico (scostamento dall’equilibrio):
0( ) cos( )x t A tw J= +
La funzione matematica coseno, quando l’angolo è maggiore di quello retto e minore di tre angoli retti, (cioè siamo nel secondo e terzo quadrante della circonferenza), viene definita in modo da assumere valore uguale ed opposto a quello che ha nell’angolo a ad esso associato nel primo quadrante, come nella figura. In questo modo se il numero 0 tJ w+ è compreso fra la misura di uno e quella di tre angoli retti, la legge oraria produce un va-lore ( ) 0x t < . In maniera del tutto analoga si sarebbe potuto proiettare lungo l’asse delle ordinate ed ottenere una forma equivalente per la legge oraria del moto armonico:
0( ) sin( )y t A tw J= + . Quali nomi si usano per queste grandezze e che significato hanno?
La quantità 0tw J+ si chiama nel suo complesso fase del moto armonico, mentre si
dice fase iniziale il valore dell’angolo 0J . Ad ogni ciclo completo la fase aumenta di un angolo giro, cioè 2p .
La fase indica in quale momento dell’oscillazione si trova il punto, e lo esprime in termini del numero totale di cicli percorsi e frazioni del ciclo completo, ciclo che può essere misurato in radianti ( rad2p ) oppure in gradi ( 360 ). Risulta:
2
fase fase inizialenumero dicicli svolti p
-=
Esercizi 38. Calcolare quanti cicli ha completato un punto che si muove di moto armonico, nell’istante in cui la fase è rad20.0 , sapendo che parte da un angolo /6p . Indicando con n il numero di cicli svolti si ha:
xA+-A 0
0cos )A tw J+(
0Jtw
0tw J+
x
a
( ) 0x t < 0
0tw J+0cos( )costw Ja+
=-
cosa
x
90sfasamento di
0J
A+-A 0
x
a
( ) 0x t < 0
0tw J+
0cos( )
cos
tw J
a
+
= -
cosa

143
/20.0 3.14 63.1
6.28n
-= =
cioè il punto ha completato 3 cicli ed un decimo di ciclo.
Se usiamo l’equazione con il coseno, un punto che si trova nella posizione di massi-mo scostamento a destra ha una fase di rad0 ( rad2p+ per ogni giro fatto), un pun-to che passa nella posizione di massimo scostamento a sinistra ha una fase di radp
rad( 2p+ per ogni giro fatto). Due punti possono oscillare di moto armonico con la stessa frequenza e la stessa ampiezza ma fasi diverse: in tal caso uno di loro sarà sempre davanti all’altro di tanto quanto vale la differenza fra le loro fasi iniziali. Ad esempio se due punti partono ad angolo retto sulla circonferenza, il moto armonico del secondo sarà sempre in ritardo di fase di rad1
2p (o, come si dice, sfasato di 90 ).
Esercizi 39. La legge oraria di un moto armonico è ( ) 3.0 cos(5.0 2.0)x t t= + . Si dica quanti cicli sono compiuti ogni secondo, qual è la durata di ciascuno, quanto vale la fase dopo 3.5 s , quanti cicli completi ha percorso fino quel momento contando dall’istante iniziale.
Da un’analisi dell’equazione data risulta rad/s5.0w = pertanto risulta:
/ / s s / Hz2 (6.28 5.0) 1.3 1 0.77T f Tp w= = = = =
Per la fase abbiamo: rad rad(5.0 3.5 2.0) 19.5´ + =
Poiché la fase iniziale vale rad2.0 , ed essendo ogni ciclo completo corrispondente a rad6.28 , il punto ha percorso: / giri giri[(19.5 2.0) 6.28] 2.8- =
40. In un certo istante, un punto che si muove di moto armonico ha completato 12.3 cicli partendo con una fase inziale di /10p . Calcolare la sua fase in quell’istante. [R:] 41. Un punto si muove lungo l’asse delle ascisse seguendo un moto armonico di legge oraria ( ) 2.50 cos(3.40 1.50)x t tw= + . Calcolare il tempo per completare 8 cicli. [R:] 42. In un certo istante, la fase di un punto che si muove di moto armonico vale rad75.0 ed esso ha completato 11.0 cicli . Se ne calcoli la fase iniziale. [R:] 43. Un cocomero è in un recipiente colmo di acqua. Nel momento della prima immersio-ne la linea di galleggiamento è fatta scendere di cm3.00 sotto al pelo dell’acqua, ed il co-comero comincia ad oscillare di moto armonico compiendo quattro cicli in s6.00 . Dopo aver scritto la legge oraria della quota ( )y t della linea di galleggiamento, si dica dove si trova dopo s0.200 e dopo s0.650 . [R: 2( ) 3.00 sin(4.19 )y t t p= - ; cm2.01- , cm2.74 ]
44. Il vento fa oscillare di moto armonico il bordo di due lenzuoli stesi, con una frequenza di 5.0 Hz. Se il primo lenzuolo raggiunge il punto di massimo scostamento dall’equilibrio 0.025 s dopo il primo, si trovi la differenza di fase in gradi fra le due oscillazioni. [R: °45 ] 45. Una particella oscilla di moto armonico lungo l’asse delle ascisse con un’ampiezza di m0.540 ed una frequenza di Hz0.0191 . Sapendo che all’istante zero la posizione della particella è m0.450 , si calcoli lo scostamento dall’equilibrio per
s5.00t = e per s15.0t = e per 3t T= . [R: m m m0.203 , 0.393 , 0.453- ] 46. Una barretta lunga L ruota con velocità angolare w attorno ad un punto C a due terzi della sua lunghezza. Che relazione esiste fra le ampiezze e le fasi dei moti armonici origi-nati dalle proiezioni degli estremi A e B sul diametro orizzontale? [R: / /( ) (2 3) sin , ( ) (1 3) sin( )A Bx t L t x t L tw w p= = + ]
03.00-
y
A
B
C

144
47. Un punto P ruota su di una circonferenza di raggio R facendo quattro giri ogni tre se-condi. Che relazione esiste fra le ampiezze, le pulsazioni e le fasi dei moti armonici gene-rati dalle proiezioni di P lungo i due diametri in figura? [R: 8 8
3 6 3( ) sin( ), ( ) sin( )A Bx t R t x t R tpp p= + = ]
4. Il pendolo semplice Cosa si intende per pendolo semplice? Il pendolo semplice è un dispositivo costituito da una massa m che oscilla legata al capo di un filo di lunghezza L ed agganciato ad un punto di sospensione. Consideriamo il ca-so ideale, in cui:
la massa del filo è trascurabile rispetto ad m , ed il filo stesso è inestensibile, cioè la sua lunghezza non cambia mai nonostante la sollecitazione a cui viene sottoposto. Il moto del pendolo non è rettilineo: può essere armonico? Il moto armonico può avvenire anche lungo una traiettoria curva, come l’arco di circonfe-renza descritto dal pendolo. In questo caso il moto si considera armonico quando la coor-dinata curvilinea ( )s t che separa la massa m dalla posizione di equilibrio, segue una legge oraria che ha la forma vista per il caso rettilineo:
0( ) cos( )s t A tw J= +
Questo accade solo se la componente della forza tangenziale alla traiettoria agisce come richiamo verso un equilibrio, ed ha intensità direttamente proporzionale alla lunghezza
( )s t dell’arco che occorre percorrere per raggiungerla.
Il moto di un pendolo semplice è un moto armonico? Per rispondere alla domanda se le oscillazioni del pendolo siano armoniche, dobbiamo ricavare un’espressione per la forza tangenziale e vedere se risulta proporzionale alla di-stanza ( )s t percorsa dal pendolo sulla circonferenza. Come si vede dal disegno, la com-
ponente tangenziale del peso agisce come forza di richiamo dato che è sempre diretta ver-so il punto più basso, e la sua intensità vale:
sintW mg J=
Ora se l’angolo J è espresso in radianti si ha che per valori minori di 8p la sua misura e
quella del seno risultano pressoché indistinguibili3,, cioè:
sin (23 )8
sep
J J J £
che sostituita nell’espressione per la forza di richiamo produce:
( )( )t
s tW mg mg k s t
LJ= = =
3 Se ϑ=π/8=0.3927 rad si ha sinϑ=0.3827: sostituendo al seno la misura in radianti dell’angolo si com-
mette un errore (ϑ-sinϑ)/sinϑ=(0.3927-0.3827)/0.3827=0.002613 (circa il 3%).
P
AC
B
6p
nW
tW
L
T
W
J
( )s t
0
J
La Controfisica
Si faccia attenzione alla reciproca lun-ghezza dei vettori che rappresentano
le forze sul pendolo.
T
W
NO
La tensione deve sempre essere più lunga della gravi-tà in quanto con la sua sola componente verticale la deve equi- librare
sinJ J
0 1

145
.
Si chiama la traiettoria
del tappo della gomma di una bici
mentre la ruota avanza Un pen
dolo rigorosamente isocrono può
essere realizzato facendo oscillare
il filo fra due archi di cicloide
-
cicloide
.
( ).
Il
pendolo cicloidale segue anch'esso
una cicloide qui tratteggiata
avendo sfruttato la definizione di radiante, ( ) /s t LJ = ed indicato i valori costanti con
/k mg L= . Come si vede, nel caso delle oscillazioni che formano piccoli angoli (8pJ £ )
il moto del pendolo semplice risulta armonico. Quanto vale il periodo delle piccole oscillazioni del pendolo semplice? Sfruttando la relazione precedentemente ricavata si ottiene il periodo delle piccole oscil-lazioni
2 2 2m mL L
Tk mg g
p p p= = =
Si traggono quindi le seguenti conclusioni:
(1) Le piccole oscillazioni sono isòcrone cioè hanno tutte la stessa durata, indipenden-temente dal valore dell’ampiezza A . (2) Il periodo delle piccole oscillazioni non dipende dalla massa appesa. (3) Il periodo delle piccole oscillazioni è tanto maggiore quanto più lungo è il filo del pen-dolo.
La velocità angolare e quella lineare di un pendolo sono costanti? No, non lo sono. Entrambe crescono a mano a mano che si procede verso il punto più bas-so dove raggiungono il massimo, poi decrescono fino ad annullarsi nella posizione di massima altezza.
Esercizi 48. Un pendolo semplice compie 40 oscillazioni al minuto. Si calcoli la lunghezza del filo e si dica cosa succede al periodo se questa viene dimezzata. Risulta s s(60/ 40) 1.50T = = da cui si ricava la lunghezza del filo:
m m2 2
2
9.81 1.502 0.560
39.44
L gTT L
gp
p´
= = = =
Se l lunghezza del filo è dimezzata il periodo nuovo periodo T ¢ risulta diviso per un fat-
tore 2 rispetto al vecchio:
s s2 1 1.502 2 1.06
2 2 2
L L TT
g gp p¢ = = = = =
quindi le oscillazioni del nuovo pendolo più corto sono più rapide. 49. Fra alcune liane pendenti da un albero, se ne deve individuare una che più lunga di
m15 . Come si può scegliere senza arrampicarsi per misurarle? [R] 50. Si descriva la traiettoria seguita da un pendolo oscillante il cui filo venga tagliato men-tre si trova: (1) nel punto di massima altezza, (2) in qualunque punto di avvicinamento all’equilibrio, (3) nel punto di minima altezza, (4) in un qualunque punto di allontana-mento dall’equilibrio. [R]
5. Corpo rigido che ruota attorno a un asse fisso Che cosa s’intende per corpo rigido? Il corpo rigido è un oggetto esteso ideale, cioè un corpo per il quale non può essere adope-rata l’approssimazione di particella, e che mantiene invariate la forma e le dimensioni qualunque sia l’azione cui lo si sottopone. Il corpo esteso può essere pensato composto di
1A
diversa ampiezzama stesso periodo
2A
traslazione
rotazione
asse

146
un grande numero di punti materiali, con la distanza fra due qualunque di essi che resta costante. I movimenti di cui il corpo rigido è capace possono a loro volta essere interpre-tati come moti d’insieme dei punti materiali che lo costituiscono. Quali movimenti sono possibili per un corpo rigido? Un corpo rigido che si muova di moto piano, per il quale le velocità dei punti del corpo si mantengono sempre parallele ad uno stesso piano, ha due movimenti fondamentali:4
Traslazione: un corpo rigido compie un moto di traslazione se tutti i suoi punti si muo-vono con lo stesso vettore velocità e lo stesso vettore accelerazione. Rotazione: un corpo rigido compie un moto di rotazione se tutti i suoi punti descrivono delle circonferenze con centro sulla stessa retta, detta asse di rotazione.
Un moto di traslazione non implica necessariamente che i punti materiali che compongo-no il corpo rigido seguano delle traiettorie rettilinee: essi potranno compiere dei tratti cur-vi, ed anche delle circonferenze. L’importante è che i punti non si spostino su circonferen-ze concentriche, come si vede nelle figure a lato. Il corpo AB descrive un moto traslatorio: sebbene le traiettorie dei punti materiali che lo compongono siano circolari, le circonfe-renze lungo cui si dispongono non hanno i centri su di un’unica retta. Per accorgersi che si tratta di traslazione pura basta verificare che, comunque presi due punti A e B sul corpo, la retta che passa per essi si mantiene parallela a se stessa, e questo è dovuto al fatto che le traiettorie di tutti i punti sono uguali. Il corpo CD, invece, descrive un moto di rotazione attorno ad un asse, e punti che lo compongono si spostano su delle circonferenze concen-triche. La velocità angolare w è una sola per tutto il corpo, mentre la velocità lineare con cui i punti seguono le circonferenze cresce con la distanza dall’asse di rotazione, secondo la relazionev Rw= che abbiamo ricavato per il moto circolare. Inoltre, una retta passante per due suoi punti qualunque C e D non si mantiene parallela a sé stessa. Cos’è il centro di massa di un corpo? Immaginiamo di scomporre un corpo rigido nelle particelle che lo compongono, e dicia-mo N il loro numero. A ciascuna di esse può applicarsi la seconda legge della dinamica, quindi disponiamo di N equazioni della forma:
i i iF m a=
Sommandole tutte , a membro a membro, secondo la regola di composizione dei vettori, a sinistra otterremo la forza risultante R
che agisce sul sistema dall’esterno. Infatti, le forze in-
terne, cioè quelle fra le particelle del corpo, danno luogo a un risultante nullo, in quanto si presentano tutte in coppie del tipo azione e reazione, cioè uguali in intensità ma opposte in verso, come ad esempio le 1F
ed 2F
in figura. Quindi:
1 1 2 2 ... N NR m a m a m a= + + +
Moltiplicando e dividendo il secondo membro per la massa M del corpo:
1 21 2 ... N
N CM
m m mR M a a a Ma
M M M
æ ö÷ç ÷ç= + + + =÷ç ÷ç ÷çè ø
La quantità fra parentesi è la media delle accelerazioni di ciascuna particella, ognuna pe-sata dalla frazione di massa totale /im M che essa costituisce. Quest’accelerazione può
essere associata a un punto, cui si dà il nome di centro di massa (CM) di posizione CMr e
velocità CMv definite in modo analogo ad CMa
:
4 Ve ne sono altri, come quello detto polare in cui un punto del corpo resta sempre fermo.
v
traslazione
A
B
AA
B
B
B
A
v
rotazione
C
D
C
C
C
D
D
D
v v
1F 2F
im

147
1 21 2 ... N
CM N
m m mr r r r
M M M= + + +
1 21 2 ... N
CM N
m m mv v v v
M M M= + + +
Quindi, quando un corpo si muove sotto l’azione di un sistema di forze, è possibile de-terminare un punto, detto CM, che segue la stessa traiettoria di un punto materiale nel quale fosse concentrata l’intera massa e sul quale fosse applicata la somma delle forze agenti sul corpo esteso. Essendo il CM ottenuto pesando la posizione di ciascuna particel-la del sistema con la sua massa, si trova più vicino alle particelle di massa maggiore. Le coordinate del vettore CMr
, cioè ,CM CMx y sono interne a un rettangolo il cui estremo A in basso a sinistra è individuato dalla minima ascissa e la minima ordinata del sistema, e l’estremo B in alto a destra, i corrispondenti valori massimi. Di quali proprietà fisiche gode il centro di massa?
Il CM è un punto che si muove come se in esso fosse concentrata l’intera massa del corpo e ad esso applicata la risultanteR
delle forze, cioè:
CMR Ma=
Questa proprietà è molto utile in alcuni calcoli di dinamica. Ad esempio se lanciamo una matita in aria, il suo CM descrive una traiettoria parabolica come farebbe un punto di massa uguale a quella della matita stessa. Quando un corpo è soggetto a un sistema di forze la cui risultante è nulla (ad esempio una coppia), il CM, se è inizialmente fermo non può entrare in movimento, e se è in moto rettilineo uniforme, prosegue imperturbato. Di quali proprietà geometriche gode il CM? In prossimità della superficie terrestre, la forza di gravità potrà considerarsi sempre costante all’interno del volume occupato dall’oggetto. Questo porta l’espressione matematica che definisce il CM a coincidere con quella che definisce il baricentro e quindi possiamo estendere al CM tutte le proprietà del baricentro, in particolare (1) il fatto che se l’oggetto presenta assi di simmetria, questi passano per il CM; (2) la proprietà distributiva. Quale effetto ha l’azione di una coppia su di un corpo rigido in quiete? L’effetto dell’applicazione di una coppia a un corpo, ad esempio la lamina qui a lato, è quello di produrre una rotazione attorno al centro di massa. Essendo, infatti, nullo il risultante 0A AR F F= - =
delle forze, l’equazione 0
CMR Ma= =
, impone che l’accelerazione del CM sia nulla. Pertanto il CM rimane fermo se era inizialmente fermo, ed il corpo, per effetto della coppia, tenderà a porsi in rotazione attorno ad un asse che passa per esso. Se l’oggetto è appoggiato su un piano, quest’effetto si osser-va con chiarezza solo in assenza di attrito. L’asse passante per il CM, attorno al qua-le il corpo tende a ruotare, in generale non è perpendicolare al piano della coppia, (salvo per oggetti simmetrici attorno a quell’asse) ma va determinato di volta in volta. Quale effetto ha l’azione di una singola forza su un corpo rigido in quiete? L’effetto di un sistema costituito da una singola forza è diverso a seconda che la sua retta d’azione passi per il CM oppure no. (1) Se la retta di azione di F
passa per il CM
allora, scegliendo un asse per il CM per calcolare il momento risultante di questo semplice sistema di una sola forza, si ottiene un valore nullo. Quindi il CM si muove di pura traslazione e non si hanno rotazioni del corpo rigido attorno ad esso. (2) Se la retta di azione della forza non passa per il CM, si sempre può traslare F
in modo che
tale passaggio per il CM avvenga, senza modificare la dinamica. Questo si realizza applicando una coppia di trasporto di valore opportuno, che come sappiamo non al-tera l’azione complessiva di F
. Dopo quest’operazione appare chiaro che l’effetto
x
CMr
CM CMv
y
CMx
CMy
A
B
F
F-
CM
CM
BF
AF
CM F
'
se la retta d azionedi F passa per il CMsi ha una traslazione
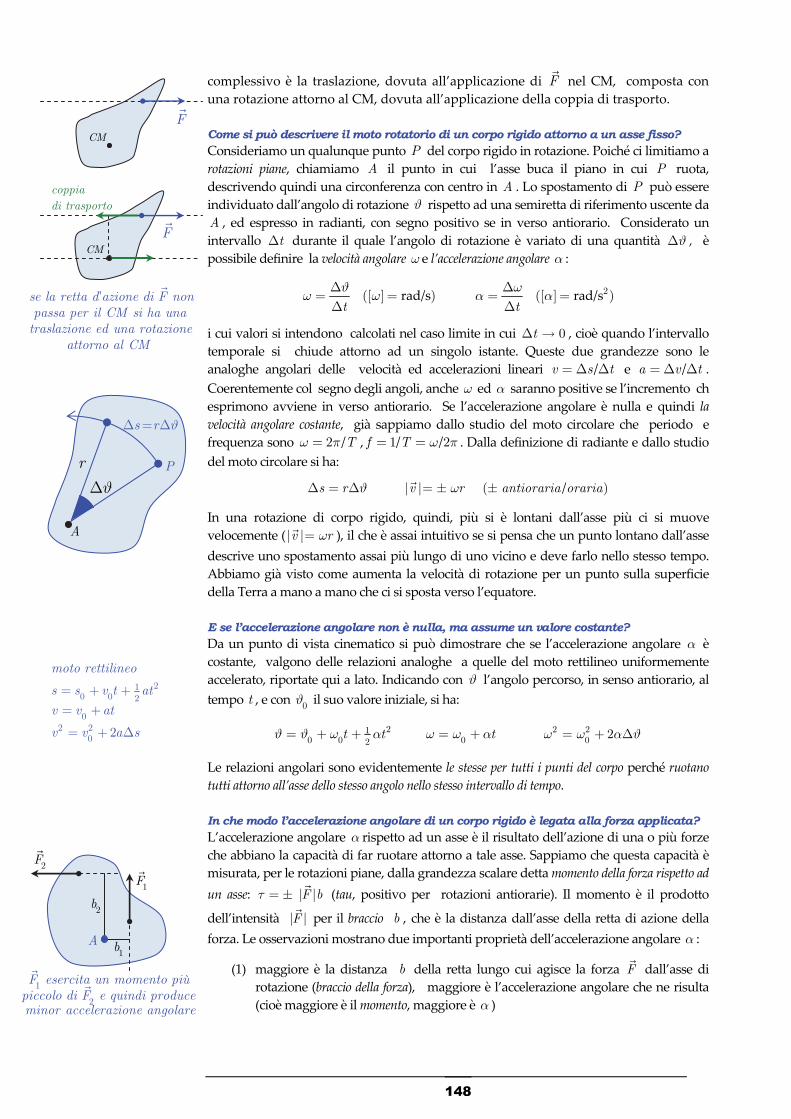
148
complessivo è la traslazione, dovuta all’applicazione di F
nel CM, composta con una rotazione attorno al CM, dovuta all’applicazione della coppia di trasporto. Come si può descrivere il moto rotatorio di un corpo rigido attorno a un asse fisso? Consideriamo un qualunque punto P del corpo rigido in rotazione. Poiché ci limitiamo a rotazioni piane, chiamiamo A il punto in cui l’asse buca il piano in cui P ruota, descrivendo quindi una circonferenza con centro in A . Lo spostamento di P può essere individuato dall’angolo di rotazione J rispetto ad una semiretta di riferimento uscente da A , ed espresso in radianti, con segno positivo se in verso antiorario. Considerato un intervallo tD durante il quale l’angolo di rotazione è variato di una quantità JD , è possibile definire la velocità angolare w e l’accelerazione angolare a :
rad/s([ ] )t
Jw w
D= =
D rad/s2([ ] )
t
wa a
D= =
D
i cui valori si intendono calcolati nel caso limite in cui 0tD , cioè quando l’intervallo temporale si chiude attorno ad un singolo istante. Queste due grandezze sono le analoghe angolari delle velocità ed accelerazioni lineari /v s t= D D e /a v t= D D . Coerentemente col segno degli angoli, anche w ed a saranno positive se l’incremento ch esprimono avviene in verso antiorario. Se l’accelerazione angolare è nulla e quindi la velocità angolare costante, già sappiamo dallo studio del moto circolare che periodo e frequenza sono /2 Tw p= , / /1 2f T w p= = . Dalla definizione di radiante e dallo studio del moto circolare si ha:
s r JD = D /| | ( )v r antioraria orariaw=
In una rotazione di corpo rigido, quindi, più si è lontani dall’asse più ci si muove velocemente (| |v rw=
), il che è assai intuitivo se si pensa che un punto lontano dall’asse descrive uno spostamento assai più lungo di uno vicino e deve farlo nello stesso tempo. Abbiamo già visto come aumenta la velocità di rotazione per un punto sulla superficie della Terra a mano a mano che ci si sposta verso l’equatore. E se l’accelerazione angolare non è nulla, ma assume un valore costante? Da un punto di vista cinematico si può dimostrare che se l’accelerazione angolare a è costante, valgono delle relazioni analoghe a quelle del moto rettilineo uniformemente accelerato, riportate qui a lato. Indicando con J l’angolo percorso, in senso antiorario, al tempo t , e con 0J il suo valore iniziale, si ha:
210 0 2
t tJ J w a= + + 0 tw w a= + 2 20 2w w a J= + D
Le relazioni angolari sono evidentemente le stesse per tutti i punti del corpo perché ruotano tutti attorno all’asse dello stesso angolo nello stesso intervallo di tempo. In che modo l’accelerazione angolare di un corpo rigido è legata alla forza applicata? L’accelerazione angolare a rispetto ad un asse è il risultato dell’azione di una o più forze che abbiano la capacità di far ruotare attorno a tale asse. Sappiamo che questa capacità è misurata, per le rotazioni piane, dalla grandezza scalare detta momento della forza rispetto ad un asse: | |F bt =
(tau, positivo per rotazioni antiorarie). Il momento è il prodotto
dell’intensità | |F
per il braccio b , che è la distanza dall’asse della retta di azione della forza. Le osservazioni mostrano due importanti proprietà dell’accelerazione angolare a :
(1) maggiore è la distanza b della retta lungo cui agisce la forza F
dall’asse di rotazione (braccio della forza), maggiore è l’accelerazione angolare che ne risulta (cioè maggiore è il momento, maggiore è a )
A
P
s r JD = D
r
JD
21
0 0 2
02 2
0 2
moto rettilineo
s s v t at
v v at
v v a s
= + += +
= + D
CM
F
'
se la retta d azione di F nonpassa per il CM si ha una
traslazione ed una rotazioneattorno al CM
coppiadi trasporto
CM
F
A1b
2b1F2F
1
2
F esercita un momento piùpiccolo di F e quindi produceminor accelerazione angolare

149
(2) se momenti uguali sono applicati a corpi di uguale massa, ma distribuita in modo differente attorno all’asse di rotazione, ad acquistare maggiore accelerazione angolare è quello la cui massa è mediamente più vicina all’asse.
Per comprendere come queste proprietà derivino dalla seconda legge della dinamica, scomponiamo l’accelerazione istantanea a di un punto P sul corpo che ruota, nelle sue componenti centripeta Ca
e tangenziale Ta . Sappiamo che l’accelerazione tangenziale è
responsabile delle variazioni nell’intensità della velocità, che è per definizione tangenziale, cioè /Ta v t= D D (dove | |T Ta a=
a seconda del senso di rotazione, antiorario od orario). Sia r la misura di AP , cioè la distanza dall’asse di rotazione per A:
1 TT
av va r
t t r r t r
wa a
æ öD D÷ç ÷= = D = = =ç ÷ç ÷çD D Dè ø
Come si descrive la dinamica di una rotazione quando = costantea ?
Se il corpo sta accelerando angolarmente, vuol dire che la sua velocità tangenziale varia, quindi su ogni punto deve agire dall’esterno una forza in direzione tangenziale. Indichiamo con im la massa del punto P considerato, e con | |iF
l’intensità della
forza tangenziale, costante come l’accelerazione. Applichiamo la seconda legge della dinamica lungo la direzione tangenziale istantanea a una rotazione antioraria, con tutte le grandezze angolari positive:
| |/T i ia F m=
22
| | | || |T i i i
i i i ii i i i i
a F r Fr F m r
r r m r ma a= = = =
Nel secondo passaggio si è moltiplicato e diviso per la distanza ir . Ricordando che il
momento torcente vale | |i i ir Ft =
: 2
i i im rt a=
Sommando i momenti di tutte le forze che agiscono su ciascuno dei punti che com-pongono il corpo, e ricordando che l’accelerazione angolare a è sempre la stessa e si può portare fuori dal segno di sommatoria, si ottiene il momento risultante t :
2i im r It a a= ⋅ =å
La quantità che abbiamo ottenuto, 2i iI m r= S (che si misura in kg m2⋅ ) a ben vede-
re è una proprietà geometrica del corpo, che non ha nulla che la leghi al particolare moto considerato. Essa dipende solo dal modo in cui la massa è distribuita attorno all’asse di rotazione, e può essere calcolata per ogni corpo, prima di metterlo in rotazione.
Legge di rotazione del corpo rigido intorno a un asse La grandezza 2
i iI m r= S detta momento d’inerzia di un corpo, esprime la resistenza del corpo alle variazioni di velocità angolare intorno a un asse, misurando il modo in cui la massa è distribuita attorno ad esso. Quando un corpo rigido sta ruotando attorno a un asse fisso, rispetto a cui il momento delle forze è t e il momento d’inerzia I , vale la relazione:
It = a
Come si può interpretare la formula It = a ? La relazione It a= descrive la dinamica delle rotazioni piane di un corpo rigido at-torno ad un asse fisso. È l’analogo rotazionale della seconda legge della dinamica
Momenti d'inerzia
2
212
225
223
2112
213
( )
( )
anello I MR
cilindro pieno I MR
sfera piena I MR
guscio sferico I MR
barretta centro I M
barretta estremo I M
=
=
=
=
=
=
A
im
Ta
Ca
P
iF
grande I piccolo I
mm
Nm 1=t Nm1=t
rad/s210a= rad/s240a=
kg5kg5
'la massa del secondo cilindroè più vicina all asse e quindia parità di momento subito hamaggior accelerazione angolare

150
F ma= e dice che il momento di una forza produce un’accelerazione angolare nel corpo
cui è applicata. Mentre la massa di un oggetto rappresenta la resistenza che esso op-pone alle traslazioni, il momento d’inerzia esprime la resistenza alle rotazioni, ed è tanto minore quanto più la massa è distribuita vicino all’asse attorno al quale si desi-dera far ruotare il corpo, come attesta il fattore 2
ir nella sommatoria. Questa proprie-tà è sfruttata ad esempio dalle ballerine che raccolgono le braccia lungo la linea di rotazione per incrementare la propria velocità riducendo il momento d’inerzia, op-pure dagli acrobati che si dotano di una lunga asta allo scopo di aumentare il proprio momento d’inerzia rispetto a un asse passante per la corda lungo la quale cammina-no. Un meccanismo analogo interesserebbe il pianeta Terra qualora le sue acque po-lari si sciogliessero. Il ghiaccio concentrato attorno all’asse di rotazione ha un mo-mento d’inerzia inferiore a quello che avrebbe l’acqua disciolta, che andrebbe a di-sporsi verso l’equatore causando un allungamento del giorno per la maggiore resi-stenza offerta alla rotazione. Il momento d’inerzia è calcolabile in modo esplicito per forme geometriche regolari: in tabella riportiamo qualche valore.
Esercizi 29. Un anello ha massa kg4.00M = e raggio cm30.0R = e spessore molto inferio-
re al raggio. Se ne calcoli il momento d’inerzia AI rispetto a un asse passante per il centro e ortogonale al piano dell’anello. Si confronti il risultato con il momento d’inerzia di un disco pieno e di una sfera piena anch’essi di M e raggio R . Calcola-re l’accelerazione angolare se sull’anello agisce un momento costante Nm6.00t = .
Immaginiamo l’anello scomposto in tante particelle di massa im , la loro distanza dal
centro dell’anello dove passa l’asse sarà sempre pari al raggio ir R= . Ne segue:
) kg m kg m2 2 2 2 2 2 2(4.00 0.300 0.360A i i i iI m r m R R m MR= S = S = S = = ´ ⋅ = ⋅
Come si vede, risulta: A D SI I I> > infatti: / /2 2 2(1 2) (2 5)MR MR MR> > . Nell’anello tutta la massa è disposta alla massima distanza possibile R dall’asse, nel disco invece una sua parte si trova nella regione fra la circonferenza esterna e l’asse. Nella sfera la parte di massa più vicina all’asse è ancora più consistente che nel disco. Il momento d’inerzia, a parità di massa, è tanto maggiore quanto più ci si allontana dall’asse. Calcoliamo l’accelerazione angolare:
/ / rad/s rad/s2 2(6.00 0.360) 16.7Ia t= = = 30. Calcolare il momento d’inerzia di un manubrio lungo cm 80L = formato da due pesi di massa kg2.0m = rispetto a un asse perpendicolare all’asta (di massa trascurabile) passante per il centro, e l’accelerazione angolare se sul manubrio, reso girevole attorno al centro, agisce un momento costante Nm5.0t = . [R: kg m rad/s2 20.64 ,7.8⋅ ] 31. Calcolare il momento d’inerzia di un manubrio lungo cm 80L = formato da due pesi di massa kg2.0m = rispetto a un asse perpendicolare all’asta di massa kg1.5M = passante per il centro, e l’accelerazione angolare se sul manubrio, reso girevole attorno al centro, agisce un momento costante Nm5.0t = . [R: kg m rad/s2 20.72 ,6.9⋅ ] 32. Una struttura è composta di due manubri incrociati saldati al centro, il primo ha un’asta lunga cm1 60L = di massa kg1 7.0M = e in fondo due masse kg1 2.0m = , il
secondo ha un’asta lunga cm2 30L = di massa kg2 5.0M = e in fondo due masse
kg2 3.0m = . Calcolare l’accelerazione angolare quando sul manubrio, , reso girevole
attorno al centro, agisce un momento Nm9.0t = . [R: rad/s212 ]
m
m
1m
1m
2m
2m

151
33. Un volante è formato da un anello di raggio cm25.0R = e massa kg1.50Am = , e
due barre lunghe quanto il diametro, di massa kg1.00Bm = ciascuna. Calcolarne il mo-mento d’inerzia rispetto ad un asse per il centro, perpendicolare ai diametri, e l’accelerazione angolare se rispetto a quest’asse è esercitato un momento Nm12.0t = . [R: kg m m/s2 20.135 , 88.9⋅ ] 34. Un disco di kg10.0M = e m3.00R = ruota in un piano orizzontale attorno al suo
centro O , per l’azione di una forza costante d’intensità N| | 100F =
, applicata sul bordo
lungo la tangente. Nel disco sono conficcate tre masse puntiformi: kg2.00Am = a di-
stanza m2.00OA = , kg1.20Bm = con m1.50OB = , ed kg1.40Cm = con m2.60OC = . Calcolare il momento d’inerzia del sistema e l’accelerazione angolare.
[R: kg m rad/s2 265.1 ,4.61⋅ ] 34. Una piattaforma girevole rispetto a un suo asse centrale, è composta di due cilindri di masse kg1 280m = , kg2 120m = e raggi m1 4.00R = , m2 2.20R = , uno sopra all’altro. La piattaforma sta ruotando in senso antiorario alla velocità angolare
rad/s5.00w = . Calcolare il momento che dall’esterno bisogna esercitare rispetto all’asse per fermarla in s 2.50 imprimendole accelerazione angolare costante. [R: Nm580- ] In quali casi è consentito applicare la relazione It = a ? La legge per la rotazione di un corpo rigido It a= , in cui t e I devono essere cal-colati rispetto allo stesso asse, ha alcune limitazioni di applicazione, e delle notevoli proprietà, che ora enunciamo senza dimostrare. 1. Si può dimostrare che It a= vale anche se l’asse di rotazione si sposta, purché resti costante la sua direzione. Ne vedremo un esempio nel moto di rotolamento. 2. In generale It a= non si può applicare a rette diverse dall’asse di rotazione, giacché so-lo per esso è stata ricavata. Quindi la relazione non si può applicare ad assi attorno a cui i punti del corpo non stanno descrivendo delle circonferenze. Per capire facciamo un esempio in cui la formula non vale: consideriamo un mattone in caduta libera. L’osservazione mostra che 0a = rispetto ad un asse orizzontale per uno spigolo A(guardando la figura, l’asse esce dal foglio), perché, come sappiamo, il peso, da solo, è incapace di ruotare un corpo. Tuttavia non è zero il momento del peso rispetto a quello stesso asse. In questo caso giustamente è It a¹ , giacché il corpo non sta de-scrivendo circonferenze attorno ad un asse per A . 3. Tuttavia si può dimostrare che It a= vale anche per assi paralleli a quello di rota-zione, purché passino per il CM del corpo. L’accelerazione angolare a ha lo stesso valore che assume rispetto al vero asse di rotazione, però sia il momento della forza, sia il momento d’inerzia vanno ora calcolati rispetto al nuovo asse parallelo. Per il mo-mento d’inerzia vale il seguente risultato:
Teorema degli assi paralleli Se d è la distanza che separa l’asse di rotazione da un asse passante per il CM e ad esso parallelo, si ha:
2CMI I Md= +
dove CMI è il momento d’inerzia rispetto all’asse per il CM, ed I quello rispetto all’asse di rotazione a cui è parallelo.
Pertanto fra tutti gli assi paralleli il momento d’inerzia è minimo per quello che passa per il CM. Si confronti, ad esempio, nella tabella dei momenti d’inerzia il momento d’inerzia di una barretta rispetto al centro e rispetto a un estremo, verificando che sono legati dal teorema degli assi paralleli.
:
corpo in caduta libera
= Ia NON può essere applicata ad un asse per A t
mgA
R
aA
B
C
O
F
1R
2R
w
CMI Id
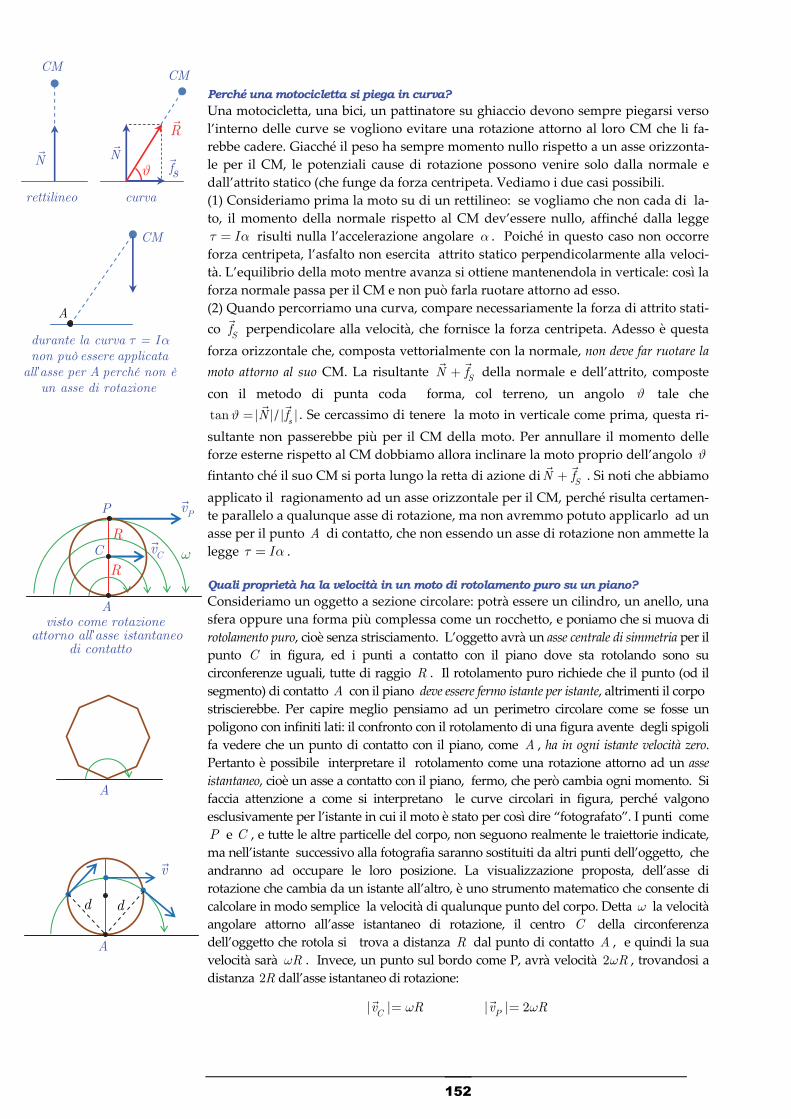
152
Perché una motocicletta si piega in curva? Una motocicletta, una bici, un pattinatore su ghiaccio devono sempre piegarsi verso l’interno delle curve se vogliono evitare una rotazione attorno al loro CM che li fa-rebbe cadere. Giacché il peso ha sempre momento nullo rispetto a un asse orizzonta-le per il CM, le potenziali cause di rotazione possono venire solo dalla normale e dall’attrito statico (che funge da forza centripeta. Vediamo i due casi possibili. (1) Consideriamo prima la moto su di un rettilineo: se vogliamo che non cada di la-to, il momento della normale rispetto al CM dev’essere nullo, affinché dalla legge
It a= risulti nulla l’accelerazione angolare a . Poiché in questo caso non occorre forza centripeta, l’asfalto non esercita attrito statico perpendicolarmente alla veloci-tà. L’equilibrio della moto mentre avanza si ottiene mantenendola in verticale: così la forza normale passa per il CM e non può farla ruotare attorno ad esso. (2) Quando percorriamo una curva, compare necessariamente la forza di attrito stati-co Sf
perpendicolare alla velocità, che fornisce la forza centripeta. Adesso è questa
forza orizzontale che, composta vettorialmente con la normale, non deve far ruotare la moto attorno al suo CM. La risultante SN f+
della normale e dell’attrito, composte
con il metodo di punta coda forma, col terreno, un angolo J tale che /tan | | | |sN fJ =
. Se cercassimo di tenere la moto in verticale come prima, questa ri-
sultante non passerebbe più per il CM della moto. Per annullare il momento delle forze esterne rispetto al CM dobbiamo allora inclinare la moto proprio dell’angolo J fintanto ché il suo CM si porta lungo la retta di azione di SN f+
. Si noti che abbiamo
applicato il ragionamento ad un asse orizzontale per il CM, perché risulta certamen-te parallelo a qualunque asse di rotazione, ma non avremmo potuto applicarlo ad un asse per il punto A di contatto, che non essendo un asse di rotazione non ammette la legge It a= . Quali proprietà ha la velocità in un moto di rotolamento puro su un piano? Consideriamo un oggetto a sezione circolare: potrà essere un cilindro, un anello, una sfera oppure una forma più complessa come un rocchetto, e poniamo che si muova di rotolamento puro, cioè senza strisciamento. L’oggetto avrà un asse centrale di simmetria per il punto C in figura, ed i punti a contatto con il piano dove sta rotolando sono su circonferenze uguali, tutte di raggio R . Il rotolamento puro richiede che il punto (od il segmento) di contatto A con il piano deve essere fermo istante per istante, altrimenti il corpo striscierebbe. Per capire meglio pensiamo ad un perimetro circolare come se fosse un poligono con infiniti lati: il confronto con il rotolamento di una figura avente degli spigoli fa vedere che un punto di contatto con il piano, come A , ha in ogni istante velocità zero. Pertanto è possibile interpretare il rotolamento come una rotazione attorno ad un asse istantaneo, cioè un asse a contatto con il piano, fermo, che però cambia ogni momento. Si faccia attenzione a come si interpretano le curve circolari in figura, perché valgono esclusivamente per l’istante in cui il moto è stato per così dire “fotografato”. I punti comeP e C , e tutte le altre particelle del corpo, non seguono realmente le traiettorie indicate, ma nell’istante successivo alla fotografia saranno sostituiti da altri punti dell’oggetto, che andranno ad occupare le loro posizione. La visualizzazione proposta, dell’asse di rotazione che cambia da un istante all’altro, è uno strumento matematico che consente di calcolare in modo semplice la velocità di qualunque punto del corpo. Detta w la velocità angolare attorno all’asse istantaneo di rotazione, il centro C della circonferenza dell’oggetto che rotola si trova a distanza R dal punto di contatto A , e quindi la sua velocità sarà Rw . Invece, un punto sul bordo come P, avrà velocità 2 Rw , trovandosi a distanza 2R dall’asse istantaneo di rotazione:
| |Cv Rw= | | 2Pv Rw=
A
d
v
d
A
wCv
P
C
A
R
R
Pv
'
visto come rotazioneattorno all asse istantaneo
di contatto
rettilineo
N
CM
N
CM
fs
J
R
curva
'
durante la curva = Inon può essere applicata
all asse per A perché non èun asse di rotazione
t a
CM
A

153
In generale, un punto a distanza d dal contatto a terra, ha velocità istantanea d’intensità | |v dw= , tangente alla circonferenza di centro A e raggiod . Accanto all’interpretazione
di un moto attorno ad un asse istantaneo, il rotolamento puro può anche esser visto come la composizione di un moto di rotazione con velocità angolare Cw attorno all’asse di
simmetria per C , composta con una traslazione di quest’asse a velocità Cv . La
condizione che il punto A abbia in ogni istante velocità nulla comporta che inA la velocità lineare dovuta alla rotazione | |R Cv Rw=
sia uguale ed opposta a quella di
traslazione Cv , cioè che | |C CR vw =
, e da un confronto con | |Cv Rw= si trova Cw w= ,
cioè la velocità angolare attorno all’asse di simmetria per C è la stessa con cui il corpo ruota attorno all’asse istantaneo per A .
Esercizi 36. Una tavola di legno poggia su di un cilindro di cm30.0R = , e lo spinge facendolo rotolare orizzontalmente senza strisciare. Sapendo che l’asse centrale avanza con velocità
cm/s| | 25.0Cv = , si calcoli la velocità della tavola e la velocità angolare del cilindro.
Poiché il punto della tavola a contatto con la sommità del cilindro non sta strisciando, i due devono avere uguale velocità.Per le proprietà del moto di rotolamento, la velocità del punto più alto è il doppio della velocità del centro:
cm/s cm/s| | 2 | | (2 25.0) 50.0T Cv v= = ´ =
La velocità angolare è legata all’intensità della velocità | |Cv del centro del cilindro:
/ / rad/s rad/s| | (25.0 30.0) 0.833Cv Rw = = =
37. Trovare la velocità angolare della ruota di una bicicletta che sta procedendo a m/s18.0 , e la velocità istantanea del punto più in alto della ruota, sapendo che esso dista
da terra m0.70 . [R: rad/s51 , m/s38 ]
38. Un motorino avanza a m/s5.00 ed un punto A sulla ruota, verticalmente sopra al centro e a distanza cm30.0d = da terra, ha velocità m/s7.00 . Calcolare la velocità an-golare delle ruote e il loro raggio. [R: rad/s23.3 , cm21.5 ]
39. Una massa m è agganciata a un filo che passa per la gola di una carrucola ed è avvolto attorno ad un rocchetto cilindrico di cm15.0R = . Sapendo che m ad un certo istante sta scendendo alla velocità di cm/s45.0 , calcolare quanto valgono, in quell’istante, la ve-locità angolare del rocchetto e la velocità dell’asse di simmetria. [R: rad/s1.50 , cm22.5 ] Quali proprietà ha l’accelerazione in un rotolamento puro? Indichiamo con m la massa del corpo che rotola e con I il suo momento d’inerzia rispetto all’asse centrale, e sia R il raggio della circonferenza a contatto col piano. Come abbiamo dimostrato prima, in un rotolamento puro la velocità angolare w è la stessa, sia misurata attorno all’asse istantaneo di contatto, sia attorno all’asse centrale. Poi-ché tale uguaglianza vale istante per istante, dovrà essere la stessa anche la rapidità con cui w cambia nel tempo, e quindi anche l’accelerazione angolare a ha lo stesso valore rispetto a questi due assi. Se indichiamo con a l’accelerazione lineare (con se-gno) con cui avanza l’asse centrale, il valore a è anche quello dell’accelerazione tan-genziale dell’asse centrale per C nel suo rotolamento intorno all’asse istantaneo per
.A Dalla relazione Ta a Ra= = si ha:
/a Ra =
Il segno positivo vale se un’accelerazione lineare nel verso del nostro riferimento produ-ce un aumento in senso antiorario della velocità angolare. In figura, ad esempio, risulta che l’aumento di w prodotto da a è in senso orario quindi /a Ra =- .
Tv
Cv
Cv
m
Av
d
A
CvCw
'
visto come rotazioneattorno all asse centralecomposta a traslazione
Rv
A
Ta a=
wR
C

154
Come si calcola l’accelerazione da rotolamento puro su un piano inclinato? Applichiamo la relazione appena ricavata al rotolamento lungo un piano inclinato di un angolo J . Orientiamo verso il basso le ascisse, parallele al piano stesso, e sia a la componente, con segno, dell’accelerazione dell’asse centrale C . Consideriamo che quando il corpo scende è 0a > , e da questo moto risulta una velocità angolare w che cresce in verso antiorario, e quindi anche 0a > . Pertanto /a Ra = + . Nel punto di contatto A deve agire una forza d’attrito statico Sf
con direzione tale da impedire ad A
di strisciare lungo il piano. Scriviamo la legge per i momenti It a= attorno all’asse di rotazione, che come abbiamo visto studiando il moto di rotolamento, è la linea di contatto per A che via via si sposta parallelamente a se stessa. Normale e attrito hanno momento nullo perché la loro retta di azione passa per l’asse di rotazione. Il peso W
ha braccio
sinR q e quindi momento sinmgR q , da cui:
/sinmgR I Ia Rt J a= = = L’asse di rotazione per A non passa per il CM: il momento d’inerzia I rispetto all’asse è quindi legato ad CMI (valori in tabella) dal teorema degli assi paralleli 2
CMI I md= + con d R= . Sostituendo abbiamo la formula per l’accelerazione da rotolamento puro sul piano inclinato:
2 2
2
sin sin
CM
mgR mgRa
I I mR
J J= =
+
La formula chiaramente vale anche per gli oggetti lanciati su per il piano. Possiamo sosti-tuire ad CMI per esempio i momenti d’inerzia dell’anello 2( )mR , del cilindro /2( 2)mR e
della sfera /2(2 5)mR . Si hanno rispettivamente le tre accelerazioni:
12
sinAnelloa g J= 23
sinCilindroa g J= 57
sinSferaa g J=
Poiché è 5 2 17 3 2> > , vale la relazione: Sfera Cilindro Anelloa a a> > . Giacché tutti e tre gli
oggetti partono fermi, in una ipotetica corsa dalla medesima altezza giù per uno stesso piano inclinato, tutte le sfere batteranno sempre tutti i cilindri, i quali a loro volta batte-ranno sempre tutti gli anelli, e questo indipendentemente dalle masse. Infatti, la maggiore resistenza alla rotazione che gli anelli hanno a causa della distribuzione della massa più lontano dall’asse di rotazione li penalizza, favorendo invece le sfere che hanno buona par-te della massa più vicino all’asse. Se scivolassero senza rotolare l’accelerazione sarebbe quella della particella di massa m lungo il piano inclinato, cioè sinSciva g J= . Il suo va-lore è maggiore di quello di qualunque oggetto che rotoli. Esercizi 40. Una ruota di raggio cm20.0R = è formata da un anello di massa kg2.00Am = e tre
barre lunghe quanto il diametro, di massa kg1.50Bm = ciascuna. Calcolare il momento d’inerzia della ruota (servendosi della tabella) e l’accelerazione che acquista su un piano inclinato di un angolo 30J = .
Il momento d’inerzia risultante è la somma di quello di un anello più quello di tre barre rispetto al centro, di lunghezza ciascuna 2R= . Dalla tabella:
/ /2 2 2 2 23 ( 12) 3 (4 12) ( )A B A B A BI m R m m R m R R m m= + = + = + =
kg m kg m2 2 2[0.200 (2.00 1.50)] 0.140= + ⋅ = ⋅ Considerato poi che la massa complessiva della ruota è: kg kg3 (2.00 3 1.50) 6.50A Bm m m= + = + ´ =
af
W
J
J
sinmg J
N
cosmg J
A
x
30
mg
a
0
( )antiorario
t >
A
bJ R

155
GF-
GF
Usando la formula per l’accelerazione sul piano inclinato di un oggetto che rotola, il cui raggio della circonferenza a contatto col piano sia R , risulta:
m/s m/s2 2
2 22 2
sin 6.50 0.200 sin 309.81 3.19
6.50 0.200 0.140
mRa g
mR I
J ´ = = ´ =
+ ´ +
41. Una pallina omogenea di massa m e raggio cm6.00R = viene lanciata su per un piano inclinato di 25J = come in figura, con velocità iniziale m/s4.00 . Sapendo che si ha rotolamento puro, calcolare l’accelerazione lineare, quella angolare, e lo spazio percor-so sul piano prima di tornare indietro. [R: m/s rad/s m2 25.80 , 10.4 ,1.38- ] 42. Uno yo-yo ha la forma di un cilindro di massa m e raggio cm5.00R = e scende ver-so il basso mentre il filo si srotola. Si osservi che i punti dello yo-yo a contatto con l’estremo A del filo sono sempre fermi, essendo fermo A. Calcolare l’accelerazione con cui scende lo yo-yo e la sua accelerazione angolare. [R: m/s rad/s2 26.54 ,131 ] 43. Si consideri un cilindro di massa m e raggio R che rotola sul piano inclinato, come la situazione studiata nel testo. Si applichi legge di rotazione del corpo rigido stavolta ad un asse per il CM parallelo a quello per A. Si eguagli il valore dell’accelerazione così tro-vato con quello del testo, ricavando la forza di attrito. [R: /(1 3) sinmg J ]
6. Gravitazione universale e orbite circolari
Nella stessa opera scientifica in cui sono formulati i tre principi della dinamica, Philosòphiae Nauralis Principia Mathematica (1687), Isaac Newton si occupa dello stu-dio del moto orbitale dei pianeti. Lo scienziato inglese dimostra per la prima volta nella storia che una traiettoria curva come quella a forma di ellisse (seguita dalla Lu-na intorno alla Terra oppure dai pianeti intorno al Sole), è spiegabile con l’azione di una forza GF
che attira il pianeta sempre verso uno stesso punto, quindi una forza
centripeta. La grande intuizione di Newton fu poi capire che la natura di questa forza centripeta è la stessa del peso mg
che sulla superficie della Terra attrae gli oggetti in direzione del centro del pianeta. Come tutte le forze, anche GF
rispetta la terza legge
della dinamica, quindi si tratta di un’interazione fra due corpi: la Terra attira la Luna con una forza GF
e la Luna attira la Terra con una forza GF-
. Questo nuovo modo
di vedere le cose rappresentò da un lato la prima grande unificazione scientifica di due fenomeni apparentemente distinti (il peso sulla superficie della Terra e il moto orbitale del nostro satellite), dall’altro fu un significativo balzo in avanti nella com-prensione del mondo, specie se confrontato con il punto di vista aristotelico per il quale il peso degli oggetti era dovuto alla naturale tendenza che questi avevano a ri-congiungersi al luogo della loro origine, che era considerato il centro del pianeta. Ma che cosa impedisce alla Luna di cadere sulla Terra? La sorprendente risposta di Newton è che la Luna cade sulla Terra, vi cade continua-mente, così come vi cadono tutti i satelliti artificiali in orbita attorno al pianeta. Un oggetto in orbita tende a cadere in ogni istante verso il centro della Terra, tuttavia il terreno, per così dire, gli scappa via da sotto esattamente con lo stesso passo, quindi non riesce mai ad avvicinarsi alla superficie. La figura a lato, tratta proprio dai Prin-cipia di Newton illustra in che senso un moto orbitale possa essere visto come situa-zione limite di un lancio orizzontale. Fissata la quota, al crescere della velocità inizia-
25
0v
R
af
a
| | 0
( )Sf R
antiorario
t= > A
v
v
v
a
a
a

156
le aumenta la gittata e con essa si allarga la curvatura della traiettoria. Quando la curvatura arriva a seguire quella della Terra, il proiettile entra in orbita. Che cosa dice la legge della gravitazione universale? Newton ha dimostrato, e l’esperienza, nei secoli successivi, confermato con le osser-vazioni, che il moto orbitale si può spiegare se qualunque coppia di corpi si attrae reciprocamente con una forza detta gravitazionale, la cui intensità è tanto maggiore quanto più le masse sono vicine, e tanto maggiore quanto maggiore è il valore della massa di ciascuno di essi. Nel caso particolare in cui le due masse siano puntiformi come le 1m ed 2m in figura, questa forza attrattiva è diretta lungo la retta congiun-gente i due corpi, ed ha un’intensità inversamente proporzionale al quadrato della loro distanza r , e direttamente proporzionale al prodotto 1 2m m⋅ delle due masse.
Indichiamo con | |GF
l’intensità di tale forza attrattiva reciproca, uguale su entram-be le masse, e col simbolo G la costante di proporzionalità, si ha:
1 22
| |G
m mF G
r=
Che relazione esiste fra la forza
12F e la forza
21F in figura?
Se indichiamo con 12F
la forza che agisce su 1m ad opera di 2m , e con 21F
la forza che
agisce su 1m subisce ad opera di 2m , indipendentemente dal fatto che le due masse sia-no differenti od uguali, il principio di azione e reazione impone che si abbia sempre
12 21F F= -
. Infatti, nella formulazione matematica della legge di gravitazione, | |GF
rap-
presenta indifferentemente sia 12| |F
che 21| |F
.
Quanto vale la costante G?
Nel Sistema Internazionale, dove 1m ed 2m sono in kilogrammi, mentre r e | |GF
sono espressi rispettivamente in metri e newton, la costante fondamentale G vale :
2
2
Nmkg
116.67 10G -= ´
Le unità di misura di G sono quelle che occorrono affinché il primo membro della legge di gravitazione risulti in newton, cioè: N kg m2 2[ ] [ ][ ] [ ]G -= . Osserviamo che G è un fattore di proporzionalità così piccolo che per produrre forze gravitazionali dell’ordine di qualche newton servono masse enormi, come quella di un pianeta.
Esercizi 44. Calcolare la forza gravitazionale con cui si attraggono due masse puntiformi di
kg100 ciascuna, poste alla distanza di m1.00
N N11 71 22 2
100 1006.67 10 6.67 10
1.00Gm m
F Gr
- -´= = ´ = ´
Una forza, come si vede, inferiore al milionesimo di Newton.
Cambia qualcosa se le masse non sono puntiformi ma estese? Questa espressione matematica della legge della gravitazione universale, vale esclusivamen-te per oggetti assimilabili a dei punti. Un oggetto rigorosamente puntiforme è un’entità solo teorica: nella pratica si considerano puntiformi oggetti in cui la distanza r coinvolta nella legge di gravitazione sia molto grande rispetto alle loro dimensioni trasversali (al-meno un ordine di grandezza, cioè dieci volte più grande). In questo senso anche una
1m
2m
r12F
21F
:
attrazione gravitazionalefra oggetti estesi
principio di sovrapposizione

157
stella può essere considerata puntiforme se le sue dimensioni sono rapportate alle distan-ze interplanetarie. Se però le masse non sono puntiformi, dobbiamo immaginarle scom-poste in porzioni piccolissime rispetto alla loro estensione, e sommare vettorialmente gli effetti della legge di gravitazione fra tutte le possibili coppie di punti. Infatti, l’esperienza mostra che vale il principio di sovrapposizione, per il quale la forza con cui interagisce cia-scuna coppia è la stessa che si avrebbe se tutte le altre coppie non esistessero.
E quando le masse estese hanno forma sferica? In caso di masse entrambe sferiche, come approssimativamente sono Terra e Luna, oppu-re di una grande massa sferica e una puntiforme, com’è il caso di un corpo sulla superficie di un pianeta, il calcolo descritto sopra si semplifica notevolmente. Se abbiamo un corpo puntiforme su una sfera, la sfera può essere scomposta in coppie di punti, simmetriche rispetto alla retta che unisce il corpo col centro, ed alla stessa distanza dal corpo attratto: ad esempio 1 e 2 , oppure 3 e 4 in figura. La simmetria fa sì che a risultante di ciascuna coppia punti sempre verso il centro della sfera. Analogamente anche la somma di tutte le risultanti sarà diretta verso il centro della sfera, e così possiamo utilizzare la formula della gravitazione immaginando ad esempio che la massa di un pianeta sia tutta concentrata nel suo centro. Se entrambe le masse sono sferiche, come ad esempio la Terra e la Luna, possiamo pertanto usare la formula a patto che r rappresenti la distanza fra i centri5. Quando lasciamo cadere una mela dall’alto, la forza che la Terra esercita sulla mela può essere calcolata inserendo nella formula per la gravitazione universale la distanza dal cen-tro del pianeta. Per la terza legge della dinamica, la forza della Terra sulla mela ha la stes-sa intensità della forza che la mela esercita sulla Terra, tuttavia, essendo la massa della me-la molto più piccola, la sua accelerazione è molto maggiore rispetto a quella che subisce il pianeta e quindi è la pietra a muoversi verso il centro della Terra e non viceversa6:
| | | |G GT pietra
T pietra
F Fa a
m m= =
Che relazione c’è con la forza peso espressa nella forma
mg ?
Sulla superficie del pianeta la distanza dal centro della Terra è sempre costante, e pari al suo raggio m66.378 10TR = ´ . Si può calcolare, una sola volta per tutti gli oggetti, il va-lore dell’accelerazione dovuta alla gravità sulla superficie terrestre , perché la forza di gra-vità dipende anch’essa dalla massa e questa si semplifica nella seconda legge della dina-mica applicata lungo la direzione in cui si ha centro della Terra. Per un oggetto in caduta libera, sapendo che kg245.97 10TM = ´ risulta:
TGy y
M mF ma G= -
2T
mR
= ya
m/s m/s24
11 2 26 2
5.97 106.67 10 9.81
(6.378 10 )ya - ´= - ´ = -
´
Si ottiene il noto valore m/s29.81g = . Questo calcolo permette di capire perché tutti gli oggetti, di maggiore o minore massa, accelerano con la stessa intensità verso il basso. In-fatti, poiché | |GF
è proporzionale a m , i corpi più massicci subiscono una forza maggiore
rispetto a quelli meno massicci. Tuttavia i corpi di massa maggiore hanno anche bisogno di una forza maggiore per accelerare, dato che è proporzionale ad m pure la loro inerzia,
5 Va detto anche che nel momento stesso in cui assumiamo che le masse siano puntiformi, e che tutte le loro proprietà possano essere individuate da una grandezza scalare m, anche solo da motivi di simmetria si potrebbe dedurre che la loro interazione deve essere diretta lungo la congiungente, in quanto in uno spazio vuoto con le sole due masse in studio, non si potrebbe definire nessun’altra direzione in modo univoco. 6 In realtà accelerano entrambe, in misura molto diversa, verso il centro di massa del sistema che costituiscono.
r
C
1F
2F
C
1 2
3 4
TM
r
GF
m
G-F
y
C petrolioroccia
schema di principio peruna mappa gravitazionale

158
cioè la tendenza a resistere all’azione di una forza (è il secondo membro della legge F ma= ). Detto diversamente: ci vuole più forza per accelerare di m/s29.81 un oggetto
massiccio che uno di piccola massa. Che cos’è una mappa gravitazionale ? Nelle regioni del pianeta dove la distribuzione della massa non è a perfetta simmetria sfe-rica, la risultante non sarà esattamente diretta verso il centro della Terra, ma subirà picco-li scostamenti. Questo accade vicino alle grandi montagne, oppure quando si hanno cavi-tà sotterranee naturali che racchiudono un giacimento petrolifero o di gas. Una misura accurata della variazione della direzione della forza di gravità rispetto al centro della Ter-ra permette di individuare tali cavità, ed è detta mappa gravitazionale. E’ con questo sistema che ad esempio si è scoperta una cavità ripiena di rocce sedimentarie leggere nella peniso-la dello Yucatan in Messico, probabilmente dovuta al cratere scavato dall’asteroide che 65 milioni di anni fa portò all’estinzione i dinosauri. Esercizi 45. Si trovi a quale distanza d dal centro della Terra, un oggetto di massa m è tirato con eguale intensità tanto dalla forza di gravità terrestre che da quella lunare, essendo
m83.84 10Lr = ´ il raggio medio dell’orbita lunare e kg227.35 10LM = ´ .
Si ha che la massa m è attratta rispettivamente dalla Terra e dalla Luna con forze la cui intensità si scrive:
2
TT
M mF G
d=
2( )L
L
L
M mF G
r d=
-
Uguagliando e semplificando si ottiene:
G TM m2
Gd
= LM m2
( )( )
L T L
L
r d M d Mr d
- =-
Nell’ultimo passaggio si è potuta estrarre la radice di ambo i membri essendo positive tut-te le quantità presenti (infatti 0Lr d- > ). Osserviamo in particolare che il risultato non dipende dalla massa m dell’oggetto. Risolvendo:
24
24 22
5.97 10
5.97 10 7.35 10Ld r
´= ⋅ =
´ + ´
m12 12 85.97 910 0.900 3.46 10
105.97 0.0735L L Lr r r-´ = ⋅ = = ´
+
Come si vede il punto in questione dista dalla Terra 9/10 della distanza Terra-Luna. Che succede all’accelerazione di gravità salendo di quota? Il denominatore è incrementato del valore della quota, il che fa diminuire l’accelerazione di gravità. Ad esempio in cima all’Everest si ha:
m/s m/s24
11 2 26 2
5.97 106.67 10 9.78
(6.378 10 8850)Everestg - ´= ´ =
´ +
mentre sulla stazione spaziale internazionale, orbitante ad un’altezza di circa km300 :
km m/s m/s24
11 2 2300 6 6 2
5.97 106.67 10 8.93
(6.378 10 0.300 10 )g - ´
= ´ =´ + ´
Come si vede la diminuzione dell’accelerazione di gravità in un’orbita bassa come quella a km300 è dell’ordine del dieci per cento. La condizione di “assenza di peso” degli astronauti non è quindi imputabile a questo, (infatti, la gravità è ben presente a
GF
rTerraR
mg
d
mTM
LM
Mappa gravitazionale del cratere nelloYucatan dovuto all asteroide che estin-se i dinosauri La zona centrale in gra-dazione diversa indica una gravità piùbassa rispetto alle rocce circostanti d
, ’
.
,
o-
vuta ai sedimenti leggeri ( : ). fonte NASA

159
quell’altezza7 e fornisce la necessaria forza centripeta!), ma al fatto che il loro moto è assi-milabile ad un moto di caduta libera, e non percepiscono il peso perché non c’è una super-ficie sulla quale si appoggiano ad esercitare una forza normale su di loro. Essi sono in una condizione del tutto analoga a quella di chi si trovasse all’interno di un ascensore cui ve-nissero tagliate le funi e precipitasse. Che succede all’accelerazione di gravità se cambia la massa del pianeta?
Generalizzando i calcoli precedenti, si ha che l’accelerazione di gravità Pg sulla superficie
di un pianeta di massa PM e raggio PR è data da:
2P
P
P
Mg G
R=
Una radicale diminuzione della massa in un pianeta di dimensioni confrontabili con la Terra comporta pertanto una diminuzione del valore dell’accelerazione dovuta alla gravi-tà sulla superficie, ad esempio:
m/s m/s23
11 2 26 2
6.42 106.67 10 3.70
(3.40 10 )Marteg -
é ù´ê ú= ´ ´ =ê ú´ê úë û
m/s m/s22
11 2 23 2
7.35 106.67 10 1.62
(1700 10 )Lunag -
é ù´ê ú= ´ ´ =ê ú´ê úë û
Quindi, sulla Luna un uomo di massa kg100 è attratto con una forza di N162 , cioè quella forza con cui la Terra attira una massa di kg16.5 . Lo stesso uomo sulla superficie di Marte è attratto con una forza di N373 , vale a dire quella con cui la Terra attira una massa di kg38 . Tuttavia non va dimenticato che la forza gravitazionale decresce con l’inverso del quadrato della distanza dal centro, pertanto sulla superficie di un pianta come Saturno, che ha una massa quasi cento volte quella terrestre ma un raggio medio dieci volte più esteso, si ottiene una accelerazione di gravità paragonabile alla nostra:
m/s m/s26
11 2 23 2
5.68 106.67 10 10.5
(60000 10 )Saturnog -
é ù´ê ú= ´ ´ =ê ú´ê úë û
In tabella i valori riguardanti i principali corpi del sistema solare.
Massa kg[ ]
R equatorialekm[ ]
g m/s2[ ]
Mercurio 233.30 10´ 2440 3.70
Venere 244.87 10´ 6000 8.87
Terra 245.97 10´ 6378 9.81 Luna 227.35 10´ 1740 1.62 Marte 236.42 10´ 3400 3.70
Giove 271.90 10´ 71500 23.1 Saturno 265.68 10´ 60000 10.5 Urano 258.68 10´ 25600 8.69 Nettuno 261.02 10´ 24800 11.2 Plutone 221.30 10´ 1150 0.58 Sole 301.99 10´ 700000 274
7 Si pensi che la gravità è ancora molto forte alla distanza della Luna, circa 400000 km, tanto da mantenerla in orbita.

160
Come cambia il periodo di un pendolo se ci si sposta su altri pianeti? La relazione fra i periodi dipende dal valore dell’accelerazione di gravità in superfi-cie, che la legge di gravitazione universale prevede essere direttamente proporzio-nale alla massa del pianeta ed inversamente proporzionale al quadrato del suo rag-gio8. Pertanto i periodi di uno stesso pendolo misurati sul pianeta A e sul pianeta B stanno fra loro nel rapporto:
2
2
2 / /
/2 /AA B B B A B
B A B AA AB
L gT g M R R M
T g R MM RL g
p
p= = = =
Esercizi 46. Sulla superficie di Marte un oggetto lanciato verticalmente con velocità iniziale
m/s| | 100ov =
raggiunge un’altezza m1340h = . Sapendo che il raggio di Marte mi-
sura m63.4 10MR = ´ si calcoli la massa di Marte. Come sappiamo la massima altezza h raggiungibile da un oggetto lanciato vertical-
mente con velocità iniziale 0v è data dalla relazione: 20
2 M
vh
g= , dove Mg è
l’accelerazione di gravità sulla superficie del pianeta, in questo caso Marte. Calco-
liamo Mg invertendo la formula: m/s m/s2 2
2 20 1003.7
2 2 1340M
vg
h= = =
´.
Invertendo la relazione che permette di trovare l’accelerazione di gravità sulla su-perficie di un pianeta si ottiene la massa del pianeta:
kg kg2 2 12
232 11
3.7 3.4 106.4 10
6.67 10M M M
M M
M
GM g Rg M
GR -
´ ´= = = = ´
´
51. Una molla ed un pendolo che sulla Terra hanno lo stesso periodo, mantengono tale relazione se spostati sulla Luna, dove 1
6L Tg g= ? Di quale percentuale dovrebbe essere variata la massa m da attaccare alla molla affinché i due oscillatori rimangano in sincro-nia? E di quale percentuale dovremmo invece variare la lunghezza del filo? [R: 500% , 83.3% ] 52. Sapendo che la massa della Luna è circa 1/81 della massa terrestre, si dica in che rap-porto stanno le oscillazioni di uno stesso pendolo sulla Terra e sulla Luna e le rispettive accelerazioni di gravità. Si supponga una densità uguale e costante nei due corpi celesti. Si confrontino i valori così trovati con quelli realmente misurati: 6T Lg g e 2.5L TT T . [R] 53. Il capitano Polipox atterra su di un lontano pianeta di raggio km7500R = e decide di misurarne la massa facendo oscillare un pendolo semplice sulla superficie. Se il filo del pendolo è lungo cm80.0L = e si osservano 60 oscillazioni s30.0 , aiutate il capitano a calcolare la massa del pianeta. [R: kg261.06 10´ ] Perché la gravità è sempre nulla all’interno di un guscio sferico? Una delle scoperte più sorprendenti di Newton è che l’attrazione gravitazionale delle pa-reti di un guscio sferico su una massa al suo interno è nulla. Per capire consideriamo una massa puntiforme m all’interno di un guscio spesso d e facciamo partire da essa un doppio cono. Il cono intercetta sempre due calotte del guscio, che hanno in generale dif-ferente superficie. Si può dimostrare che le due porzioni di guscio così ottenute attirano la massa m con forze di uguale intensità ma opposte. Il motivo è che la massa della porzio- 8 Ricordiamo infatti che si ha 2/g GM R= , con Nm kg/11 26.67 10G -= ´ .

161
ne di guscio individuata cresce con il quadrato della distanza da m , compensando così l’indebolimento della forza gravitazionale, dove denominatore cresce anch’esso col qua-drato della distanza.
Come si dimostra che le due forze hanno uguale intensità? Poniamo che l’apertura a (in radianti) dei due coni sia così stretta da poter approssi-miamo la porzione di guscio con un dischetto tanto piccolo da poter descrivere l’attrazione gravitazionale su m con la formula per le coppie di masse puntiformi:
/ 2| |A A AF Gmm r=
, / 2| |B B BF Gmm r=
. Le masse Am ed Bm dei dischetti sono direttamen-te proporzionali alle superfici di base, a loro volta proporzionali ai quadrati dei diametri
Ar a⋅ ed Br a⋅ . Pertanto le masse dei due dischi sono proporzionali ai quadrati 2Ar , 2
Br delle distanze da m , e così anche la forza di attrazione gravitazionale che esercitano sum , che ha Am o Bm al numeratore, aumenta col quadrato della distanza. Ma è vero pure che la forza gravitazionale su m diminuisce col quadrato della distanza dalla massa che esercita la forza. Questi due effetti si bilanciano esattamente e le forze sono sempre uguali ed opposte, producendo una risultante nulla su m . Il ragionamento si ripete per qualunque coppia di coni con vertici coincidenti: il fatto che alcuni di questi coni avranno le basi non perpendicolari alla superficie laterale non altera la nostra conclusione. Un ri-sultato di geometria assicura che gli angoli formati dalle pareti del doppio cono con le ba-si su di una sfera sono gli stessi da ambo le parti, e quindi l’effetto dell’inclinazione sarà lo stesso da entrambe le parti.
La gravità in fondo ad una miniera come cambia rispetto alla superficie? Se scaviamo un buco nel pianeta e vi scendiamo dentro, secondo quanto dimostrato, il guscio di materiale che ci lasciamo alle spalle non esercita su di noi alcuna attrazione, ma il nostro peso sarà tutto dovuto solo alla sfera che inizia sotto ai nostri piedi. Se la Terra avesse densità costante9, allora la gravità diminuirebbe, infatti, detto r il raggio di questa sfera, avremmo un valore di ( )g r tanto minore quanto più piccolo è r :
343
2 2
( ) 4( )
3
rM rg r G G G r
r r
r prp= = = ⋅
In realtà però, se togliamo un guscio alla Terra, la sua densità media aumenta perché al centro il pianeta presenta un nucleo di ferro e nichel molto più massiccio del resto, e come risultato avremmo che ad alcune profondità il valore di g è maggiore che in superficie.
7. Il moto orbitale circolare Che cos’è un’orbita e che forma può avere? Si chiama orbita la traiettoria curva che, nello spazio un corpo descrive attorno ad un punto centrale, sotto la sola azione della forza gravitazionale. Ad esempio sono or-bite le traiettorie dei pianeti e delle comete intorno al centro del sistema solare. Le orbite possono essere sia curve chiuse, come ellissi o circonferenze, sia curve aperte come parabole o iperboli. Mentre il corpo tenta di avanzare in linea retta, secondo il principio d’inerzia, la gravità lo tira verso il punto centrale, dove è situato l’oggetto massiccio che esercita la forza attrattiva. Se la velocità del corpo orbitante è sufficien-temente elevata, la traiettoria s’incurva verso il centro di attrazione, però manca 9 È un’ipotesi irreale perché una sfera omogenea delle dimensioni di un pianeta non potrebbe essere stabile a densità co-stante.
m
Bm
Am
Br
Ara
a
Br a
d
d
Br a
rTR
2| | A
A
A
mmF G
r=
2
A
fa crescere
la forza con r
2
A
fa diminuire
la forza con r
r
Ov
iperbole
parabola
ellisse
circonferenza

162
l’impatto con esso e gli gira intorno, continuando indefinitamente a cadere. Il “can-none di Newton” che abbiamo prima esaminato è un esperimento concettuale che permette di capire il fenomeno dell’orbita. Ponendo che tale cannone immaginario abbastanza in alto da superare l’atmosfera terrestre (che ostacolerebbe il lancio per il principio di azione e reazione) se imprimiamo abbastanza velocità la traiettoria del proiettile s’incurva allo stesso passo a cui s’incurva la superficie della Terra, e così il corpo entra in una continua caduta libera, senza mai raggiungere il suolo, che lette-ralmente gli sfugge di sotto. Ci concentreremo ora sulla dinamica delle orbite circo-lari, che sono le più semplici e permettono di studiare il moto dei satelliti intorno alla Terra. I pianeti del sistema solare, invece, non descrivono orbite circolari, ma a forma di ellisse, tuttavia, allo scopo di capire i fenomeni fisici fondamentali, non si commet-te un grande errore si considerano circonferenze. Con quale velocità può essere percorsa un’orbita circolare? E’ immediato rendersi conto che non è possibile percorrere un’orbita alla velocità che si desidera, ma che piuttosto questa è già stabilita dall’altezza alla quale si vuole fissare l’orbita. Lun-go la direzione radiale istantanea si ha, infatti, che la forza di gravità fornisce la forza cen-tripeta necessaria. Poiché la gravità diminuisce con l’altezza, diminuirà anche la forza cen-tripeta che essa può fornire, e quindi, con l’altezza decresce pure la velocità orbitale | |ov
.
In un riferimento con l’asse radiale uscente dal centro della Terra si ha:
Tforza M m
Ggravitazionale
= -2r
m= -2| |ov
r
forza
centripeta=
| | To
GMv
r=
Questa relazione esprime la velocità orbitale10 | |ov
con la quale la traiettoria deve essere per-corsa se si vuole che rimanga stabile, cioè la velocità cui andare se si vuole che la forza di gravità fornisca proprio il valore della forza centripeta necessaria a percorrere quella cir-conferenza. Osserviamo che:
• La presenza di r al denominatore indica che la velocità orbitale decresce con l’altezza da terra: le orbite più sono esterne più sono lente.
• La velocità orbitale non dipende dalla massa, e per questo motivo ad esempio una stazione spaziale e gli astronauti al suo interno, possono seguire la stessa or-bita pure se hanno masse molto differenti fra loro.
Come si calcola il periodo di un’orbita circolare? Si chiama periodo T il tempo che occorre a descrivere un’orbita completa. Moltiplicando la velocità orbitale | |ov
per il periodo si ottiene lo spazio totale 2 rp percorso in un’orbita,
cioè | | 2ov T rp=
. Ricaviamo da questa relazione /| | 2ov r Tp=
ed inseriamolo nell’espressione della forza centripeta:
22 2
2
4| |o
forza m rv m m r
centripeta r T
pw= = =
Nell’ultimo passaggio abbiamo sfruttato le relazioni per la velocità angolare /2 Tw p= e | |ov rw= . Imponiamo che la gravitazione fornisca la necessaria forza centripeta:
10 Detta anche velocità kepleriana.
La Controfisica Se quindi un astronauta in orbita vede un satellite in orbita un chilometro sopra alla sua testa, questa posizione reciproca è destinata cambiare giacché il satellite resterà indietro rispetto all’astronauta a causa della differente velocità orbitale.
Ov
C
y
GFr
M
m
Ov
F
F
2| |
O
necessaria
vm
r
2
mMG
rfornita

163
m2TGM
mr
= costante2 3 3
2 2 2
42
4T
T
GMr r rT
GMT T
pp
p = = =
L’ultima relazione è detta legge di Keplero dei periodi11 per il moto orbitale. In tabella ab-biamo periodo e velocità orbitale dei principali corpi del sistema solare Per i corpi in orbi-ta intorno al Sole Si osservi il diminuire della velocità orbitale e l’aumentare periodo al crescere del raggio medio.
r medio orbita km[ ]
T anni[ ]
o|v |
km/s[ ] Mercurio 658 10´ 0.24 47.4
Venere 6108 10´ 0.62 35.0 Terra 6150 10´ 1 29.8 Marte 6228 10´ 1.88 24.1 Giove 6778 10´ 11.7 13.1 Saturno 61430 10´ 29.5 9.6 Urano 62870 10´ 84.0 6.8 Nettuno 64500 10´ 165 5.4 Plutone 65900 10´ 248 4.7
Sole (rispetto al centro galattico)
202.55 10´ 82.4 10´ 217
Luna (rispetto alla Terra)
384000 giorni27.3 1.02
Che tipo di orbite si hanno in un sistema binario? Per sistema binario s’intende quello formato da due corpi di massa quasi della stessa enti-tà, ad esempio due stelle, che si attraggono tramite la sola gravità. Consideriamo qui sol-tanto il caso semplice in cui la distanza d fra loro non cambia mai: in tal caso l’unico moto possibile è quello di orbitare, con lo stesso periodo T e la stessa velocità angolare w lun-go due circonferenze di centro comune sulla retta che li unisce, ed i raggi 1r , 2r tali che
1 2r r d+ = . La forza centripeta 21 1m rw che 1m esercita su 2m dev’essere uguale e oppo-
sta a quella 22 2m rw che 2m esercita su 1m . Possiamo allora ricavare 1r ed 2r :
2 2 1 21 1 2 2
2 1
r mm r m r
r mw w= =
Abbiamo ottenuto la relazione che definisce il centro di massa di due masse puntiformi a distanza d . I due corpi si troveranno allora sempre da parti opposte rispetto al comune centro di rotazione, che è il CM del sistema, che come sappiamo è più vicino al corpo di massa maggiore. La forza centripeta, uguale per i due corpi, come sappiamo è fornita dall’attrazione gravitazionale / 2
1 2Gm m d . Uguagliando si ha:
1m12
1
G mrw = 2
2
m
d 2m
1 222
Gm mrw =
2d
che addizionate danno:
2 1 21 2 2
( )( )
G m mr r
dw
++ =
11 O anche terza legge di Keplero. La approfondiremo meglio quando affronteremo il moto orbitale ellittico, nel capitolo dedicato ai principi di conservazione.
La ControfisicaIl rapporto 3:2 fra l’esponente del raggio e quello del periodo di rivolu-zione, fu intuito da Keplero, oltre che dalle osservazioni, basandosi sulla conoscenza risalente alla scuola pita-gorica, che due corde tese le cui lun-ghezze sono nel rapporto 3:2 produ-cevano suoni molto armonici fra di loro, e assai gradevoli se emessi insie-me. Questo rapporto è chiamato una quinta (ad esempio fra le note DO e SOL): Keplero pensava che i pianeti si muovessero in rapporti armonici co-me legati al Sole da corde invisibili, e pubblico i suoi risultati nel 1619 in un’opera scientifica che lascia traspari-re quest’idea sin dal titolo: Harmonices Mundi.
La ControfisicaLa maggioranza delle stelle nella no-stra galassia ha almeno una compagna e forma con essa un sistema binario: il Sole costituisce un’eccezione.
La ControfisicaNel caso di un sistema binario, le for-ze di gravità uguali e contrarie che agiscono, sono entrambe centripete dato che tutti e due i corpi descrivono traiettorie circolari (od ellittiche) con centro comune, quindi qui dovremmo parlare di sia di azione centripeta che di reazione centripeta.
1r2r
CM
2F
CM1
F

164
e sostituendo 1 2r r d+ = possiamo risolvere per /2T p w= ed avere il periodo:
3
1 2
2( )
dT
G m mp=
+
Quanto deve essere alta come mimino un’orbita? Se non vi fosse l’atmosfera, e la Terra fosse una sfera dalla superficie liscia, sarebbe possi-bile un’orbita anche al livello del mare. Tuttavia il fatto di dover spostare l’aria per muo-versi implica, per la terza legge di Newton, che l’aria eserciti una forza uguale e contraria, rallentando così il moto, ed impedendo la stabilità dato che la velocità orbitale deve resta-re costante. Pertanto l’orbita più bassa possibile si ha alla quota in cui l’aria è sufficiente-mente rarefatta da non ostacolare il moto: sono circa km150 . Gli shuttle percorrono orbi-te con km250r = alla velocità di circa km/s8 e h 1 30minT = , i satelliti GPS orbite con km20000r = e 12T h= . E’ inoltre possibile che un’orbita sia geosincrona, cioè tale che il suo periodo duri esattamente un giorno. Sostituendo h s424 8.64 10T = = ´ si ot-tiene:
( ) m km
213 73 4.22 10 35800
2 T T
Tr GM h r R
p
æ ö÷ç ÷= = ´ = - =ç ÷ç ÷çè ø
A quell’altezza la velocità orbitale è circa km/s3.1 . Se poi l’orbita geosincrona avviene nel piano che contiene l’equatore, e nello stesso verso di rotazione della Terra, si dice geo-stazionaria. Un satellite per telecomunicazioni segue tale orbita, in modo da mantenersi sempre sopra ad uno stesso punto sulla superficie dell’equatore terrestre12. Quanto sono efficaci i satelliti spia? I satelliti spia devono percorrere orbite basse per avere risoluzione sufficiente a distingue-re oggetti vicini. L’elevata velocità che le orbite basse richiedono, fa si che il tempo di tran-sito sopra all’obiettivo sia veramente breve. Con riferimento alla figura, assumendo che l’osservazione sia possibile da un angolo al massimo di 45 , si ha 2d h , e se l’altezza è la tipica dei satelliti spia, km300h = , il tempo di permanenza sopra all’obiettivo in un passaggio con km/s8ov »
sarà / s[(300 2) 8]´ cioè dell’ordine del minuto. Per di più la
successiva orbita non ripasserà esattamente sopra all’obiettivo perché la Terra sotto ha ruotato con velocità differente dal satellite e si dovranno attendere numerose orbite per un nuovo transito.
Come funziona il sistema GPS ? Il sistema di posizionamento globale (Global Positioning System) si avvale di un ricevito-re ed una rete di 24 satelliti posti a quota m20000 , con un periodo orbitale di h12 . Il no-stro apparecchio è solo ricevitore, non invia alcun segnale ai satelliti, che quindi neppure sanno della nostra esistenza. Essi inviano il segnale della loro posizione in ogni istante: ba-stano tre di questi segnali per poter individuare con certezza la nostra posizione sul piane-ta. Per capire riferiamoci ad un piano e supponiamo di ricevere la posizione del satellite A insieme al tempo in cui il segnale è stato inviato. Dalla velocità della luce, alla quale viag-giano le onde radio, ricaviamo la nostra distanza da A. Questo permette di concludere che ci troviamo su di una circonferenza (nello spazio una sfera) centrata in A, di raggio pari alla distanza ricavata. Contemporaneamente riceviamo il segnale dal satellite B, e quindi dovremo stare pure lungo una circonferenza di centro B e raggio trovato con lo stesso sistema. Questo riduce la nostra possibile posizione solo ai punti 1 e 2 in figura. La ricezione di un terzo segnale permette infine di stabilire che la nostra posizione è la 1, per-ché dobbiamo appartenere pure ad una terza circonferenza con centro in C.
12 Il che permette facilmente di individuare il sud in una grande città europea, semplicemente osservando la direzione verso la quale puntano le antenne paraboliche televisive per ricevere il segnale satellitare.
La Controfisica I satelliti artificiali sono usati nelle telecomunicazioni, per la meteorolo-gia, per la navigazione o per rilevare informazioni, e si dividono in equa-toriali e polari. Fra i primi vi sono i geostazionari, dalla cui altezza si vede il 43% del globo, pari ad un angolo visuale di 17°. Sono indispensabili nelle telecomunicazioni perché fissi in un punto sopra al pianeta, ma per la loro grande distanza possono racco-gliere solo immagini di bassa risolu-zione. I satelliti che passano sopra ai poli hanno in genere un’orbita bassa, 400-1200km, e fanno 14 orbite al giorno. Il costo per metterli in orbita è più contenuto e le immagini che rac-colgono sono più definite. Tuttavia la loro orbita dura circa 90 minuti e pas-sano sopra ad un’area del pianeta solo due volte al giorno per brevi tratti. Molto noto è il satellite polare Hubble, dedicato all’astronomia ottica, ad un orbita di 800km.
A
B
C
12
45
d
h

165
Esercizi 46. L’orbita del pianeta Nettuno può approssimativamente essere considerata una circon-ferenza. Sapendo che Nettuno dista dal Sole circa 30 volte quanto dista la Terra, si calcoli quanti anni gli occorrono per completare una rivoluzione.
Possiamo rispondere utilizzando la terza legge di Keplero per il moto orbitale:
costante3 3
2 2T N
T N
r r
T T= =
Le informazioni del testo possono essere espresse scrivendo che 30N Tr r= . Sostituendo: 3
Tr3 3
2
30 T
T
r
T
⋅=
322 3 2
230 30 164N T N T T
N
T T T T TT
= ⋅ = ⋅ = ⋅
ed essendo anno1TT = si ha anni164NT = .
47. Le osservazioni mostrano che la Luna impiega g h27 7 43min per una rivoluzione
completa attorno alla Terra (rivoluzione siderale). Assumendo che l’orbita sia circolare e che kg227.35 10LM = ´ calcolare la distanza media della Terra dal nostro satellite e
l’accelerazione centripeta della Luna. [R: km m/s3 2383000 ,2.72 10-´ ]
48. Un satellite descrive un’orbita circolare attorno alla Terra ad una distanza di km500 dalla sua superficie, impiegando 94.6min . Trovare la frequenza di rotazione del satellite (numero di giri ogni secondo), la sua velocità orbitale e l’accelerazione centripeta. Mostra-re quindi che l’accelerazione centripeta è uguale all’accelerazione dovuta alla gravità ter-restre. [R: Hz m/s m/s4 3 21.70 10 ,7.61 10 ,8.41-´ ´ ]
49. L’astronave Enterprise si posiziona in orbita (geo)stazionaria attorno al pianeta Klin-gon, ad una distanza di km47.00 10´ dalla superficie, compiendo una rivoluzione in due giorni terrestri. Il capitano Picard chiede al tenente comandante Data quale sia la massa di Klingon, ma una tempesta magnetica ha cancellato parzialmente i dati e risulta disponibile solo il raggio km41.00 10KR = ´ . Aiutate Data a calcolare la massa del pia-
neta. [R: kg241.01 10´ ]
50. Si dice punto lagrangiano L1 una posizione fra la Terra e la Luna che abbia lo stesso periodo della Luna. Se considerassimo solo la gravità terrestre, un punto più vicino della Luna non potrebbe mai soddisfare questo requisito, perché dovrebbe seguire la sua orbita più velocemente della Luna. Tuttavia la gravità lunare equilibra parte della gravità terre-stre rendendo il fenomeno possibile. Si imposti l’equazione che permette di trovare il rag-gio r dell’orbita del punto L1. [R] Che cos’è un disco di accrescimento? In un sistema di due corpi celesti, esiste sempre un punto lungo la congiungente i centri, dove le attrazioni gravitazionali reciproche si bilanciano. Esso si trova più vicino al centro del corpo di massa maggiore: ne abbiano calcolato la posizione nel caso di Terra e Luna. Nei sistemi di stelle doppie, può capitare che i due astri siano così vicini che questo punto (contrassegnato con x in figura) viene a cadere all’interno della stella più voluminosa. Ac-cade allora che la materia stellare che si trova più distante dal centro dell’astro rispetto a tale punto, venga prelevata e trasportata verso l’altra stella. Essa segue un percorso a spi-rale, detto disco di accrescimento, lungo il quale spesso si riscalda molto, aumentando pro-gressivamente la massa della stella ricevente. Se quest’ultima è una nana bianca, cioè una stella che ha completato il ciclo di fusione nucleare, il continuo flusso di materia la farà crescere finché non supererà il limite massimo consentito per le nane bianca, cioè 1.4 volte la massa del Sole, raggiunto il quale avrà luogo un’esplosione, chiamata supernova Ia.
La Controfisica A riprova che le orbite esterne sono le più lente, si confronti la velocità orbi-tale di 8km/s caratteristica dei satelliti artificiali più bassi (200-300km), con la velocità orbitale di 1km/s della Luna (400000km circa).
r
m
Lr
1L
disco diaccrescimento

166
8. L’effetto Coriolis e le forze apparenti Prendiamo ora in esame i riferimenti rotanti, che non essendo in moto rettilineo uni-forme non sono inerziali , e cioè un corpo posto in essi può subire una variazione di velocità anche senza essere sottoposto all’azione di una forza. L’esempio più famoso è l’effetto centrifugo già esaminato, cioè la sensazione di essere spinti lontano dall’asse di rotazione. Un secondo fenomeno che ha luogo nei riferimenti rotanti è noto come effetto Coriolis, e che, a differenza dell’effetto centrifugo che riguarda tutti i corpi del sistema rotante, caratterizza soltanto gli oggetti in movimento:
Effetto Coriolis Un corpo che si muove in un sistema di riferimento rotante sperimenta una continua de-viazione della traiettoria in direzione sempre perpendicolare alla propria velocità istanta-nea, misurata nel sistema rotante. Che cosa dà origine all’effetto Coriolis? Per capire consideriamo un piatto che gira e una pallina appoggiata, e poniamo che l’attrito statico (massimo) la tenga ferma in un punto fra centro e bordo. Vista da un osservatore solidale al piatto che ruota, la pallina appare avere velocità zero in qualunque direzione. Immaginiamo ora di spostare la pallina verso il centro: cosa accadrà? I punti del piatto ruotano tanto più rapidamente quanto più sono esterni: infatti devono descrivere circonferenze sempre più grandi nello stesso intervallo di tempo. Questa proprietà per cui i punti vanno tanto più veloce quanto più distano dall’asse di rotazione è detta rotazione di corpo rigido. Avvicinando la pallina all’asse di rotazione, per il principio di indipendenza dei moti perpendicolari, non modifi-chiamo la velocità tangenziale ma forniamo al blocchetto un moto radiale. Pertanto la pallina mantiene la velocità di rotazione che aveva nella posizione iniziale, e si trova così a voler ruotare più rapidamente rispetto ai punti del piatto su cui poggia, che seguono la rotazione di corpo rigido. La conseguenza di questo è che un osser-vatore solidale al piatto vede la pallina accelerare nella direzione del moto di rota-zione, proprio come se ci fosse qualcuno ad esercitare una forza perpendicolarmente alla sua velocità radiale. Se viceversa allontaniamo la pallina dall’asse, questa si trova ad avere una velocità minore rispetto ai punti del piatto sul quale poggia, e quindi tende a restare indietro nel moto di rotazione, come se qualcosa la frenasse perpendi-colarmente alla sua velocità radiale. Se infine spingiamo la pallina nel verso della rota-zione, questa si muove più velocemente di prima attorno all’asse e quindi per man-tenerla su quella traiettoria circolare occorre una maggiore forza centripeta. Se l’attrito statico non ce la fa a fornire tale forza aggiuntiva, la pallina si sposta verso l’esterno dove occorre meno forza centripeta grazie maggior raggio, e per un osser-vatore agganciato al piatto che ruota tutto va come se avesse agito una forza perpen-dicolarmente alla velocità tangenziale della pallina. Quali sono le conseguenze sul clima terrestre dell’effetto Coriolis? L’effetto Coriolis può essere osservato sulla superficie di un pianeta, perché qui la velocità di rotazione diminuisce gradualmente andando dall’equatore, che è più lon-tano dall’asse di rotazione, verso regioni ad alte latitudini (i poli), più vicine all’asse, con valori come in figura. In particolare l’effetto Coriolis agisce sulla dire-zione di spostamento delle grandi correnti oceaniche e svolge un importante ruolo nel moto dei venti. Quando vi sono due regioni della Terra dove i raggi del Sole ri-scaldano differentemente le masse di aria13 , si creano zone cosiddette di alta pressione (aria calda) e bassa pressione (aria fredda). L’alta pressione spinge l’aria in direzione
13 Per vari motivi ad esempio la diversa inclinazione dei raggi stessi, che all’equatore sono perpendicolari al terreno, e via via si fanno più radenti ai poli.
bassa
alta
alta
0
/1670km h
/1466km h
/835km h30
60

167
delle zone di bassa pressione, tuttavia se queste si trovano a latitudini dove la velo-cità di rotazione del pianeta è diversa, il vento viene deviato lateralmente, cioè subi-sce una spinta perpendicolare alla sua velocità a causa dell’effetto Coriolis. Nel no-stro emisfero (detto boreale), l’aria che si muove dall’equatore verso nord viene de-viata in direzione ovest, e l’aria che si muove da nord verso l’equatore in direzione est, quindi sempre a destra rispetto alla velocità. Nell’emisfero australe invece, lo spostamento è sempre a sinistra rispetto alla velocità. Il risultato di questa deflessio-ne è che il vento anziché procedere verso le regioni di bassa pressione finisce per cir-colare intorno ad esse, creando quello che viene detto un ciclone. Il processo che in assenza della rotazione terrestre avrebbe pareggiato rapidamente la differenza di pressione diviene così molto lungo e le regioni di bassa pressione sono persistenti, con l’effetto di portare pioggia anche lontano dagli oceani, fino alle alte latitudini, rendendo in tal modo temperate e fertili zone che altrimenti sarebbero assai più fredde. L’effetto è così marcato che la direzione in cui soffiano i venti arriva a essere lungo delle linee dove la pressione è costante (dette isòbare), anziché perpendico-larmente ad esse come ci si aspetterebbe. Che cosa sono le forze apparenti? L’effetto Coriolis sembra il risultato dell’azione di una forza, giacché produce un cambiamento di direzione nella velocità del corpo, e quindi un’accelerazione. Ma come insegna la terza legge della dinamica, per qualunque forza, oltre all’oggetto A che la subisce, deve esserci un soggetto B che la esercita, e che a sua volta subisce una forza uguale e contraria ad opera di A. Poiché non esiste alcun soggetto che esercita la “forza” di Coriolis, ma è solo il riferimento che sta ruotando a produrlo, essa è detta forza apparente. Le forze apparenti sono un modo comodo di descrivere i fenomeni fisici nei riferimenti che si muovono di moto accelerato (rotatorio o trasla-torio) cioè non inerziali. Abbiamo maggiore familiarità con altre forze apparenti, come la cosiddetta “forza” d’inerzia, cioè il fenomeno per cui l’accelerazione del no-stro riferimento, ad esempio la nostra auto, tende a lanciarci in avanti ad ogni frena-ta , ed indietro ad ogni aumento di velocità. Com’è evidente, non c’è nessuno che stia esercitando la “forza” d’inerzia, ma essa è solo il riflesso del moto del riferimento. È una forza apparente anche la “forza” centrifuga, cioè quell’effetto che abbiamo ana-lizzato all’inizio del capitolo, per cui in un riferimento rotante si ha l’impressione di venir scagliati verso l’esterno, lungo la direzione radiale.
La Controfisica Un’analisi dettagliata mostra che la
forza apparente di Coriolis ha intensità
| || | 2 | | sin
Coriolis
VF m v
Ra=
dove v
è la velocità dell’oggetto, V
quella del riferimento prodotta dalla rotazione a distanza R dall’asse, ed a l’angolo fra le due velocità
'
( )
US Agency for International Development
Uragano nell emisfero borealea forma di spirale logaritmica

168





























