Embed Size (px)
DESCRIPTION
car nwrkin is total madness u dumb ass
Citation preview

CAN NETWORKING FOR CARS
INTRODUCTION
This project is based on VTU syllabus. The proposed system is based on ATMEL 89S52
µcontroller which is in our syllabus.
For doing this project we use some of the software like
Embedded C for programming the application software to the microcontroller.
Protel schematic software is used for designing the circuit diagram for this project.
Express PCB software is used for designing the PCB for this project.
(Since PCB making is a big process and involves lot of machineries which are expensive,
we are going to outsource this to the manufacturer.)
ABSTRACT
Application of the proposed system is controlling all the peripherals in car by using advanced high
speed serial communication (Controller Area Network - CAN). CAN is a serial bus system
especially suited for networking "intelligent" devices as well as sensors and actuators within a
system or sub-system.
It is a serial bus system with multi-master capabilities, that is, all CAN nodes are able to transmit
data and several CAN nodes can request the bus simultaneously.
The relative simplicity of the CAN protocol means that very little cost and effort need to expended
on personal training; the CAN chips interfaces make applications programming relatively simple.
Introductory courses, function libraries, starter kits, host interfaces, I/O modules and tools are
available from a variety of vendors permitting low-cost implementation of CAN networks.
The use of CAN in most of European passenger cars and the decision by truck and off-road
vehicle manufacturers for CAN guarantees the availability of CAN chips for more than 10 years.
Other high volume markets, like domestic appliances and industrial control, also increase the
CAN sales figures. Up to spring 1999 there are more than 150 million CAN nodes installed.
One of the outstanding features of the CAN protocol is its high transmission reliability.

Advantages of this CAN
Add/remove of any node at any time is possible.
More security.
Any node can be performing as a master/slave at any time.
Complexity of the circuit is less.
Only two wire communication. So amount of wires for connecting node with central unit is very less compared to other networking system.
Need for serial communication in vehicles
• Many vehicles already have a large number of electronic control systems (Door lock
controller, Engine temperature controller, Wiper controller, Lamps controller, GPS
controller etc,).
• The complexity of the functions implemented in these systems necessitates an exchange
of data between them. With conventional systems, data is exchanged by means of
dedicated signal lines, but this is becoming increasingly difficult and expensive as control
functions become ever more complex. In the case of complex control systems in
particular, the number of connections cannot be increased much further.
• This can only be done by networking the system components using a serial data bus
system.
How does it function?
Principles of data exchange
In CAN networks there is no addressing of subscribers or stations in the conventional sense, but
instead, prioritized messages are transmitted. A transmitter sends a message to all CAN nodes
(broadcasting). Each node decides on the basis of the identifier received whether it should
process the message or not. The identifier also determines the priority that the message enjoys in
competition for bus access.
Each CAN message can transmit from 0 to 8 bytes of user information. Of course, you can
transmit longer data information by using segmentation. The maximum transmission rate is
specified as 1Mbit/s. This value applies to networks up to 40 m. For longer distances the data
rate must be reduced. For distances up to 500 m a speed of 125kbit/s is possible, and for
transmissions up to 1 km a data rate of 50kbit/s is permitted.
When data are transmitted by CAN, no stations are addressed, but instead, the content of the
message (e.g. rpm or engine temperature) is designated by an identifier that is unique throughout

the network. The identifier defines not only the content but also the priority of the message. This
is important for bus allocation when several stations are competing for bus access. If the CPU of
a given station wishes to send a message to one or more stations, it passes the data to be
transmitted and their identifiers to the assigned CAN chip ("Make ready"). This is all the CPU has
to do: To initiate data exchange. The message is constructed and transmitted by the CAN chip.
As soon as the CAN chip receives the bus allocation ("Send Message") all other stations on the
CAN network become receivers of this message ("Receive Message").
Each station in the CAN network, having received the message correctly, performs an
acceptance test to determine whether the data received are relevant for that station ("Select"). If
the data are of significance for the station concerned they are processed ("Accept"), otherwise
they are ignored.
A high degree of system and configuration flexibility is achieved as a result of the content-
oriented addressing scheme. It is very easy to add stations to the existing CAN network without
making any hardware or software modifications to the existing stations, provided that the new
stations are purely receivers. Because the data transmission protocol does not require physical
destination addresses for the individual components, it supports the concept of modular
electronics and also permits multiple reception (broadcast, multicast) and the synchronization of
distributed processes: measurements needed as information by several controllers can be
transmitted via the network, in such a way that it is unnecessary for each controller to have its
own sensor.
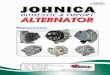
BLOCK DIAGRAM

Door lock controller unit
• This controller unit receives door control messages from central control unit through CAN serial bus.
• If the message is “Front Left Door Close “, the door lock controller immediately activate the front door close motor.
• If the message is “Front Left Door status”, the door lock controller unit read the status of front left door and send the status through CAN bus.
Engine temperature controller unit
CAN Bus
Front Left Head LampCAN Node
Front Right Head LampCAN Node
Front Left Door CAN Node
Engine control unit
Rear Left Head LampCAN Node
Rear Right Head LampCAN Node
Rear Left Door CAN Node
Rear Right Door CAN Node
Front Right Door CAN Node
Main Control Unit
Wiper CAN Node
GPS Receiver
CAN Node

• This controller unit senses the engine temperature always, and if the temperature range
exceeds the limit, this unit sends a message to the main controller unit by using CAN
bus.
• The main controller unit after receiving the message it will indicate the engine
temperature status in cluster by the form of light glow / warning beep.
Wiper controller unit
• This unit maintains the wiper status.
• If car is initially switched on, this unit will check the status of wiper.
• If wiper motor is disconnected from this unit, this unit will send corresponding message to CAN bus.
• The main controller unit receives the message from CAN bus and according to message this unit will indicate the status in cluster.
• If rain comes means this unit will detect the rain and immediately switch on the wiper.
Lamps controller unit
• This unit controls the lamps depending on the input.
• Before switch on the lamp this unit will check the lamp status, means lamp failure/not.
• If lamp is failure this unit will send lamp failure message to central unit through CAN bus.
• According to message the central unit indicates the lamp status in cluster.
GPS controller unit
• This unit receives the vehicle position from the GPS receiver and sends the position
details through CAN bus.
• The display unit receives the message from can bus according to message this unit will
display the vehicle position in LCD panel.
Advantages of the CAN in vehicles
There are four main applications for serial communication in vehicles, each having
different requirements and objectives. Networking controllers for engine timing transmission
chassis and brakes. The data rates are in the range - typical of real-time systems - of 200kBit/s to
1Mbit/s.Networking components of chassis electronics and electronics, which make the vehicle
more comfortable. Examples of such multiplex applications are lighting control, air-conditioning,

central locking, and seat and mirror adjustment. Particular importance has to be attached here to
the cost of the components and wiring requirements. Typical data rates are around 50kBit/s. In
the near future, serial communication will also be used in the field of mobile communication in
order to link components such as car radios, car telephones, navigation aids etc. to a central,
ergonomically designed control panel. The functions defined in the Prometheus project, such as
vehicle-to-vehicle and vehicle-to-infrastructure communication will depend to a large extent on
serial communication. At present, Controller Area Network (CAN) can be used for the first three
applications, but for diagnosis the preferred solution is an interface according to ISO 9141.