-
7/31/2019 CAM Lecture
1/31
7/6/2012
1
CAMMANUFACTURING ENGINEERING
Dr. Maqsood Ahmed KhanAssociate Professor & Co Chairman,
IMD
COURSE PLAN
Topic Lectures
Conventional Numerical Control 02
NC Part Programming 03
Computer Numerical Control 02
Midterm Exam 01
Group Technology and FMS 03
Process Planning 02
CAD/CAM Software 03
Software: CATIA V5 (R18) ; Matlab R2008a
Marks Distribution:
1. Final theory paper = 60 Marks2. Sessional Marks
i. Attendance = 10
ii. Midterm Exam = 15
iii. Project = 15
40 Marks
-
7/31/2019 CAM Lecture
2/31
7/6/2012
2
BOOKS
CAD/CAM
1. CAD/CAM is a term which means computer-aided designand
computer-aided manufacturing.
2. It is the technology concerned with the use of
digitalcomputers to perform certain functions in design
andproduction.
3. It is a bridge between design and manufacturing.
Definition-CAM
Computer-aided manufacturing (CAM) can be defined as theuse of
computer systems to plan, manage, and control the
operations of a manufacturing plant through either direct
orindirect computer interface with the plants
productionresources.
-
7/31/2019 CAM Lecture
3/31
-
7/31/2019 CAM Lecture
4/31
7/6/2012
4
MANUFACTURING SUPPORTAPPLICATIONS:
(INDIRECT
INTERFACE
)These are the indirect applications in which the computer
is
used in support of the production operations in the plant,
but
there is no direct interface between the computer and the
manufacturing process.
MANUFACTURING SUPPORTAPPLICATIONS:
(INDIRECT INTERFACE)Some examples of CAM for manufacturing
support are
1. Numerical control part programming by computers
2. Computer-automated process planning
3. Computer-generated work standard
4. Production scheduling
5. Material requirement planning
6. Shop floor control (detailed management of activities and
the flow of materials inside the plant - including the
workers, materials, machines and time)
-
7/31/2019 CAM Lecture
5/31
7/6/2012
5
THE PRODUCT CYCLE AND CAD/CAM
Product Cycle: Various activities and functions that must be
accomplished in the design and manufacture of a product is
termed
as the product cycle.
Figure-1 Product Cycle without CAD/CAM
Figure-1 Product Cycle without CAD/CAM
-
7/31/2019 CAM Lecture
6/31
7/6/2012
6
Figure-1 Product Cycle with CAD/CAM
Product Cycle with CAD/CAM
-
7/31/2019 CAM Lecture
7/31
7/6/2012
7
CONVENTIONAL NUMERICAL CONTROL
Definition
Programmable automation in which the mechanical actions of a
machine tool are controlled by a program containing coded
alphanumeric data that represents relative positions between a
work
head (e.g., cutting tool) and a work part.
CONVENTIONAL NUMERICAL CONTROL
Motivation
To manufacture complex curved geometries in 2D or 3D was
extremely expensive by mechanical means (which usually would
require complex jigs to control the cutter motions)
Machining components with repeatable accuracy
Unmanned machining operations
NC technology has been applied to a wide variety of
operations,
including machining, assembly, inspection, sheet metal
press-
working, and spot welding.
-
7/31/2019 CAM Lecture
8/31
7/6/2012
8
CONVENTIONAL NUMERICAL CONTROL
History Late 1940s
John T. Parsons (contractor of USAF) introduced a method of
using punchedcard containing coordinate points of complex three
dimensional profiles tocontrol a machine tool. The machine was
directed to move in smallincrements, thus generating the desire
surface of a helicopter blade.
1948
Parsons demonstrated his first concept to the U.S. Air
Force.
1951
MIT was involved in the project.
1952
MIT demonstrated first prototype of vertical NC milling machine
(punchedtape input).
1955After refinements commercially available NC machines were
displayed atNational Machine Tool Show
BASIC COMPONENTS OF AN NC SYSTEM
A typical NC system consists of the following three elements
1. Program of instruction
2. Machine control unit (MCU)
3. Machine tool or other controlled process
-
7/31/2019 CAM Lecture
9/31
7/6/2012
9
BASIC COMPONENTS OF AN NC SYSTEM
Program of Instruction:
The program of instructions is the detailed step-by-step set
of
directions which tell the machine tool what to do.
It is coded in alphanumerical and symbolic form on some type
of
input medium that can be interpreted by the controller unit.
The
most common input medium today is 1-inch wide punched tape.
-
7/31/2019 CAM Lecture
10/31
7/6/2012
10
BASIC COMPONENTS OF AN NC SYSTEM
There are two other methods of input to the NC system:
1. Manual data input (MDI)
2. Direct link with the computer (DNC)
Controller Unit
The second basic component of the NC system is the controller
unit.
This consists of the electronics and hardware that read and
interpret
the program of instructions and convert it into mechanical
actions of
the machine.
BASIC COMPONENTS OF AN NC SYSTEM
Typical elements of a conventional NC controller unit
Tape reader
Data Buffer
Signal output channels to the machine tool
Feed-back channels from the machine tool
Sequence controls
Machine tool
The third basic component of an NC system is the machine
tool.
-
7/31/2019 CAM Lecture
11/31
7/6/2012
11
THE NC PROCEDURE
Process Planning
Part Programming
1. Manual Part programming
2. Computer-assisted part programming
Tape preparation
Tape verification
Production
NC COORDINATE SYSTEM
In order for the part programmer to plan the sequence of
positions and
movements of the cutting tool relative to the work-piece, it is
necessary to
establish a standard axis system.
All the machine tools make use of Cartesian coordinate system
for the
sake of simplicity.
The familiar right hand coordinate system is used for
designating the
axes
In addition to the three linear axes, milling machine may have
the
capacity to control one or more rotational axes.
-
7/31/2019 CAM Lecture
12/31
7/6/2012
12
FIXED ZERO AND FLOATING ZERO
The Programmer must determine the position of the tool relative
to
the origin (zero point) of the coordinate system.
NC machines have two methods for specifying the zero point.
Fixed zero
Floating zero
Fixed zero
The origin is always located at the same position on the machine
table.
Usually, the position is the lower left-hand corner of the table
and all
tool locations are defined by positive x & y
coordinates.
-
7/31/2019 CAM Lecture
13/31
7/6/2012
13
FIXED ZERO AND FLOATING ZERO
Floating zero
This is more common feature on modern NC machines, which
allows
the machine operator to set the zero point at any position on
the
machine table.
The part programmer decides the location of zero point
The decision is based on part programmers convenience
The location of zero point is communicated to the machine
operator
At the beginning of the job, the operator moves the tool
manually to
the target point
The target point is some convenient place for the operator
(corner
point, pre drilled hole etc.)
FIXED ZERO AND FLOATING ZERO
The target point has been referenced to the zero point by
the
programmer.
When the tool has been positioned at the target point, the
machine
operator presses a zero button to define the origin point.
M/C coordinate system
Target point
-
7/31/2019 CAM Lecture
14/31
7/6/2012
14
NC MOTION CONTROL SYSTEM
There are four basic types of motion control systems.
Point-to-point NC
Sometimes it is also called a positioning system. The objective
of
machine tool control system is to move the cutting tool to a
predefined location.
Straight-cut NC
Straight cut control systems are capable of moving the
cutting
tool parallel to one of the major axis at a controlled rate
suitablefor machining.
NC MOTION CONTROL SYSTEM
2-Axis Contouring NC
Contouring is the most complex, the most flexible, and the
most
expensive type of machine tool control. It is capable of
performing both PTP and Straight-cut operations. It has
simultaneous control of more than one axis movement of the
machine tool.
3-Axis Contouring NC
It can control three axis simultaneously. Suitable for
machining
3D complex profiles encountered in industrial practice such
as
aerospace components, mould and dies etc.
-
7/31/2019 CAM Lecture
15/31
7/6/2012
15
INTERPOLATION METHODS
The selection of appropriate interpolation method is
importantfor 2 and 3 axis contouring jobs.
The paths that a contouring-type NC system is required tomachine
often consist of circular arcs and other smooth
nonlinearshapes.
Some of these shapes can be defined mathematically by
relativelysimple geometric formulas.
Whereas others cannot be mathematically defined except
byapproximation.
In any case, a fundamental problem in generating these
shapesusing NC equipment is that these shapes are
continuous,whereas NC is digital.
To solve this problem the path (circle or any other free
formcurve) must be divided into a series of straight line
segmentsthat approximate the path.
-
7/31/2019 CAM Lecture
16/31
7/6/2012
16
INTERPOLATION METHODS
The tool is commanded to machine each line segment in
succession so that the machined path closely matches the
desired
path.
The maximum error between the nominal (desired) surface and
the actual (machined) surface can be controlled by the lengths
of
the individual line segments,
INTERPOLATION METHODS
If the programmer were required to specify the endpoints for
each ofthe line segments (to machine along a curve), the
programming taskwould be extremely laborious and likely to errors.
Also, the partprogram would be extremely longbecause of the large
number ofpoints.
To ease the burden, interpolation routines have been developed
thatcalculate the intermediate points to be followed by the cutter
togenerate a particular mathematically defined or approximated
path.
A number of interpolation methods are available to deal with
smoothcontinuous path in contouring.
1. Linear interpolation
2. Circular interpolation
3. Helical interpolation4. Parabolic interpolation
5. Cubic interpolation
-
7/31/2019 CAM Lecture
17/31
7/6/2012
17
INTERPOLATION METHODS
Linear interpolation:
This is the most basic and used method when a straight line
pathis to be generated in continuous path NC. The
programmerspecifies the beginning point and end point of the
straight lineand the feed rate to be used along the straight line.
Theinterpolator computes the feed rates for each of the two (or
three)axes to achieve the specified feed rate.
Circular interpolation:
This method permits programming of a circular arc by
specifyingthe following parameters: (1) the coordinates of the
startingpoint, (2) the coordinates of the endpoint, (3) either the
center orradius of the arc. The generated tool path consists of a
series ofsmall straight line segments calculated by the
interpolation
module.
INTERPOLATION METHODS
Helical interpolation:
This method combines the circular interpolation scheme for
two
axes described above with linear movement of a third axis.
This
permits the definition of a helical path in
three-dimensional
space. Applications Include the machining of large Internal
threads.
Parabolic and cubic interpolation:
These routines provide approximations of free form curves
using
higher order equations. Most applications are in the
aerospace
and automotive Industries for free form designs that cannot
accurately and conveniently be approximated by combining
linear and circular interpolations
-
7/31/2019 CAM Lecture
18/31
7/6/2012
18
ABSOLUTE AND INCREMENTAL POSITIONING
Another option sometimes available to the part programmer is
to
use either an absolute system of tool positioning or an
incremental system.
Absolute system
It is always defined with respect to
the zero point.
Incremental system
It is defined with reference to the
previous tool location.
NC PART PROGRAMMING
CHAP # 8
-
7/31/2019 CAM Lecture
19/31
7/6/2012
19
THE PUNCHED TAPE IN NC
TAPE CODING AND FORMAT
NC tape coding
There are eight regular columns of holes.
There is also a ninth column of holes between the 3rd and
4th regular columns used as sprocket holes.
The coding of the tape is provided by either the presence or
absence of a hole, hence it becomes the binary code.
It uses the base 2 number system, which can represent any
number in the decimal system.
Besides numbers, alphabetical letters and other symbols can
also be coded.
Eight columns provide more than enough binary digits to
define any of the required symbols.
-
7/31/2019 CAM Lecture
20/31
7/6/2012
20
TAPE CODING AND FORMAT
How Instructions are formed
A complete row makes a character, which represents a letter,
number, or other symbol.
A word is a collection of characters
A block is a collection of words.
A block of words is a complete NC instruction.
To separate blocks, an end-of-block (EOB) symbol is used.
The tape reader feeds the data from the tape into the buffer
in
blocks.
TAPE CODING AND FORMAT
NC words
Sequence number (n-word): N10, N20, N100.
Preparatory word (g-word): g00, g01, g02.
Coordinates (x-,y-, and z-words): x+9.4625, y-23.6845
Feed rate (f-word): f30.
Cutting speed (s-word): s2000
Tool selection (t-word): t05
Miscellaneous function (m-word): m03 (start spindle).
-
7/31/2019 CAM Lecture
21/31
7/6/2012
21
MANUAL PART PROGRAMMING
To prepare a part program using the manual method, the
programmer writes the machining instructions on a special
form called a part programming manuscript.
Manuscripts come in various forms, depending on the
machine tool and tape format to be used.
The manuscript is a listing of the relative tool and
work-piece
positions.
It also include other type of data, such as miscellaneous
instructions, and speed/feed specifications.
Except for complex parts with many holes, manual
programming is ideally suited for PTP applications.
On the other side, except for the simple jobs, manual
programming become quite time consuming for contouring
jobs.
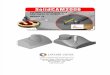
EXAMPLE
Suppose that the part to be programmed is a drilling job. The
engineering
drawings for the part is presented in the figure. Three holes
are to be drilled
at a diameter of0.484-in. The close hole size tolerance requires
reaming to
0.5-in dia. Recommended parameters areas follows:
Drill bits are manually changed by the machine operator. The
machine has
the floating-zerofeature and absolute positioning.
Speed (rpm) Feed (in/min)
0.484-in dia. drill 592 3.55
0.5-in dia. reamer 382 3.82
-
7/31/2019 CAM Lecture
22/31
7/6/2012
22
-
7/31/2019 CAM Lecture
23/31
7/6/2012
23
COMPUTER-ASSISTED PART PROGRAMMING
In the more complicated PTP jobs and in contouring
applications,
manual part programming becomes an extremely tedious task
and
subject to errors.
In these instances it is much more appropriate to use the
high-
speed digital computer to assist in the part programming
process.
Many part programming language systems have been developed
to perform automatically most of the calculations.
In computer assisted part programming the machining
instructions are written English-like statements of the NC
programming language.
These statements are processed by the computer to prepare
the
tape.
The computer automatically punches the tape in the proper
tape
format for the particular machine.
THE PART PROGRAMMERS JOBThe part programmers responsibility in
computer-assisted part
programming consists of two basic steps:
Defining the work-part geometry
Specifying the operation sequence and tool path
-
7/31/2019 CAM Lecture
24/31
7/6/2012
24
DEFINING THE WORK-PART GEOMETRY
No matter how complicated the work-part may appear, it is
composed of basic geometric elements, points, straight
lines,
planes, circles, cylinders, and other mathematically defined
surfaces.
It is the part programmers task to identify the elements out
of which the part is composed.
Each geometric element must be identified and the
dimensions and location of the element explicitly defined.
SPECIFYING THE OPERATION SEQUENCE AND TOOL PATH After defining
the work-part geometry, the programmer must
next construct the path that the cutter will follow to
machine
the part.
It involves a detailed step-by-step sequence of cutter
moves.
The moves are made along the geometry elements, which
have already been defined.
The programmer can use the various motion commands to
create these movements.
-
7/31/2019 CAM Lecture
25/31
7/6/2012
25
THE COMPUTERS JOB
The computers job in computer-assisted part programming
consists of the following
1. Input translation
2. Arithmetic calculations
3. Cutter offset computation
4. Postprocessor
THE COMPUTERS JOBInput Translation
The part programmer enters the program written in APT or
other language
The input translation component converts the coded
instructions into computer-usable form for further
processing.
1. Syntax check of the input code to identify errors in
format,
punctuation, spelling etc.
2. Assigning sequence number to each APT statement.
3. Converting geometry elements into suitable form for
computer processing
4. Generating intermediate file called PROFIL that is utilized
in
subsequent arithmetic calculations
-
7/31/2019 CAM Lecture
26/31
7/6/2012
26
THE COMPUTERS JOB
Arithmetic Calculations
It is a set of subroutines for solving the mathematics
required
to generate the part surface and generate tool-path.
The arithmetic calculations are performed on the PROFIL
file.
It frees the programmer from the time-consuming and error-
prone geometry and trigonometry calculations.
The output of this module is CLFILE.
Cutter offset computation
The second task of the part programmer is to construct the
toolpath. However, the actual tool path is different from the
part
outline.
The actual tool path is achieved by offsetting the path from
the
desired part surface equal to the radius of the cutter.
THE COMPUTERS JOBPost-Processor
NC machine systems are different, they have different
features
and capabilities
High-level programming languages are not intended for only
one machine tool type. They are designed to be general
purpose.
The final task of the computer in computer-assisted part
programming is post-processing, in which the CLFILE file is
converted into low-level code that can be interpreted by the
NC
controller.
The output of post-processing is a part program consisting
of
G-codes, x-, y-, and z-coordinates, S,F,M, and other functions
in
word address format.
A unique post-processor must be written fro each machine
tool
system.
-
7/31/2019 CAM Lecture
27/31
7/6/2012
27
NC PART PROGRAMMING LANGUAGES APT (Automatically Programmed
Tool)
ADAPT (Adaption of APT)
EXAPT (Extended subset of APT)
UNIAPT
SPLIT (Sundstrand Processing Language Internally Translated)
COMPACT II
PROMPT
CINTURN II
The most widely used NC part programming language is APT.
-
7/31/2019 CAM Lecture
28/31
7/6/2012
28
APT LANGUAGES
APT is a three dimensional system that can be used to
control
up to 5-axes.
Our discussion is limited to the more familiar axes, x, y, and
z,
and excluding the rotational coordinates.
APT can be used to control a variety of different machining
operations, but we will cover only drilling and milling
applications.
There are four types of statements in APT language:
1. Geometric Statements
2. Motion Statements
3. Post-processor statements
4. Auxiliary Statements
GEOMETRIC STATEMENTS These define the geometric elements that
comprise the work-part.
The general form of an APT geometry statement is
Symbol = geometry type / descriptive data
Symbol: To identify the geometric element
Geometry type: To identify the type of geometric element (should
beAPT vocabulary word)
Descriptive data: To define the geometric element precisely
Example:
P1 = POINT / 5.0, 4.0, 0.0
-
7/31/2019 CAM Lecture
29/31
7/6/2012
29
L3 = LINE / P3, P4
L4 = LINE / P5, PARLEL, L3
PL1 = PLANE / P1, P4, P5
PL2 = PLANE / P2, PARLEL, PL1
C1 = CIRCLE / CENTER, P1, RADIUS, 5.0
EXAMPLE
-
7/31/2019 CAM Lecture
30/31
7/6/2012
30
P0 = POINT / 0, -1.0, 0
P1 = POINT / 6.0, 1.125, 0
P2 = POINT / 0, 0, 0
P3 = POINT / 6.0, 0, 0
P4 = POINT / 1.75, 4.5, 0
L1 = LINE / P2, P3
C1 = CIRCLE / CENTER, P1, RADIUS, 1.125
L2 = LINE / P4, LEFT, TANTO, C1
L3 = LINE / P2, P4
PL1 = PLANE / P2, P3, P4
MOTION STATEMENTS The general form of motion statement is
motion command/ descriptive data
Example:
GOTO/P1
At the beginning of the motion statements, the tool must be
given a
starting point.
The part programmer keys into this starting position with
thefollowing statement
FROM/TARG
-
7/31/2019 CAM Lecture
31/31
7/6/2012
POINT-TO-POINT MOTIONS
There are only two basic PTP motion commands:
1. GOTO
2. GODLTA
The GOTO statement instructs the tool to go to a particular
point
location.
GOTO/2.0, 7.0, 0.0
The GODLTA command specifies an incremental move for the
tool.
Example: GODLTA/ 2.0, 7.0, 0.0
GODLTA command is useful in drilling and related operations
EXAMPLE
P1=POINT/1.0, 2.0, 0
P2 = POINT/1.0, 1.0, 0
P3 = POINT/3.5, 1.5, 0
P0 = POINT/-1.0, 3.0, 2.0
FROM/P0
GOTO/P1
GODLTA/0, 0, -1.0
GODLTA/0, 0, +1.0
GOTO/P2
GODLTA/0, 0, -1.0
GODLTA/0, 0, +1.0
GOTO/P3
GODLTA/0, 0, -1.0
GODLTA/0, 0, +1.0GOTO/P0