-
Physical Mathematics:What Physicists and Engineers Need to
Know
Kevin Cahill
Department of Physics and Astronomy
University of New Mexico, Albuquerque, NM 87131-1156
-
iCopyright c20042010 Kevin Cahill
-
ii
For Marie, Mike, Sean, Peter, Mia, and James, and
in honor of Muntader al-Zaidi and Julian Assange.
-
Contents
Preface
1. Linear Algebra
2. Fourier Series
3. Fourier and Laplace Transforms
4. Infinite Series
5. Complex-Variable Theory
6. Differential Equations
7. Integral Equations
8. Legendre Polynomials
9. Bessel Functions
10. Group Theory
11. Tensors and Local Symmetries
12. Forms
13. Probability and Statistics
14. Monte Carlos
15. Chaos and Fractals
16. Functional Derivatives
17. Path Integrals
18. The Renormalization Group
19. Finance
20. Strings
-
Preface
A word to students: You will find lots of physical examples
crammed in
amongst the mathematics of this book. Dont let them bother you.
As you
master the mathematics, you will learn some of the physics by
osmosis, just
as people learn a foreign language by living in a foreign
country.
This book has two goals. One is to teach mathematics in the
context of
physics. Students of physics and engineering can learn both
physics and
mathematics when they study mathematics with the help of
physical exam-
ples and problems. The other goal is to explain succinctly those
concepts of
mathematics that are simple and that help one understand
physics. Linear
dependence and analyticity are simple and helpful. Elaborate
convergence
tests for infinite series and exhaustive lists of the properties
of special func-
tions are not. This mathematical triage does not always work:
Whitneys
embedding theorem is helpful but not simple.
The book is intended to support a one- or two-semester course
for graduate
students and advanced undergraduates. One could teach the first
seven,
eight, or nine chapters in the first semester, and the other
chapters in the
second semester.
Several friends and colleagues, especially Bernard Becker,
Steven Boyd,
Robert Burckel, Colston Chandler, Vageli Coutsias, David Dunlap,
Daniel
Finley, Franco Giuliani, Igor Gorelov, Dinesh Loomba, Michael
Malik, Sud-
hakar Prasad, Randy Reeder, and Dmitri Sergatskov have given me
valuable
advice.
The students in the courses in which I have developed this book
have
improved it by asking questions, contributing ideas, suggesting
topics, and
correcting mistakes. I am particularly grateful to Mss. Marie
Cahill and
Toby Tolley and to Messrs. Chris Cesare, Robert Cordwell,
Amo-Kwao
Godwin, Aram Gragossian, Aaron Hankin, Tyler Keating, Joshua
Koch,
Akash Rakholia, Ravi Raghunathan, Akash Rakholia, and Daniel
Young for
-
Preface v
ideas and questions and to Mss. Tiffany Hayes and Sheng Liu and
Messrs.
Thomas Beechem, Charles Cherqui, Aaron Hankin, Ben Oliker,
Boleszek
Osinski, Ravi Raghunathan, Christopher Vergien, Zhou Yang,
Daniel Zir-
zow, for pointing out several typos.
-
1Linear Algebra
1.1 Numbers
The natural numbers are the positive integers, with or without
zero. Ra-
tional numbers are ratios of integers. An irrational number x is
one whose
decimal digits dn
x =
n=mx
dn10n
(1.1)
do not repeat. Thus, the repeating decimals 1/2 = 0.50000 . . .
and 1/3 =
0.3 0.33333 . . . are rational, while pi = 3.141592654 . . . is
not. Incidentally,decimal arithemetic was invented in India over
1500 years ago but was not
widely adopted in the Europe until the seventeenth century.
The real numbersR include the rational numbers and the
irrational num-
bers; they correspond to all the points on an infinite line
called the real line.
The complex numbers C are the real numbers with one new number
i
whose square is 1. A complex number z is a linear combination of
a realnumber x and a real multiple iy of i
z = x+ iy. (1.2)
Here x = Rez is said to be the real part of z, and y the
imaginary part
y = Imz. One adds complex numbers by adding their real and
imaginary
parts
z1 + z2 = x1 + iy1 + x2 + iy2 = x1 + x2 + i(y1 + y2). (1.3)
Since i2 = 1, the product of two complex numbers isz1z2 = (x1 +
iy1)(x2 + iy2) = x1x2 y1y2 + i(x1y2 + y1x2). (1.4)
-
2 Linear Algebra
The polar representation z = r exp(i) of a complex number z = x+
iy is
z = x+ iy = rei = r(cos + i sin ) (1.5)
in which r is the modulus of z
r = |z| =x2 + y2 (1.6)
and is its argument
= arctan (y/x). (1.7)
Since exp(2pii) = 1, there is an inevitable ambiguity in the
definition of the
argument of any complex number: the argument + 2pin gives the
same z
as .
There are two common notations z and z for the complex conjugate
ofa complex number z = x+ iy
z = z = x iy. (1.8)The square of the modulus of a complex number
z = x+ iy is
|z|2 = x2 + y2 = (x+ iy)(x iy) = zz = zz. (1.9)The inverse of a
complex number z = x+ iy is
z1 = (x+ iy)1 =x iy
(x iy)(x+ iy) =x iyx2 + y2
=z
zz=
z
|z|2 . (1.10)
Grassmann numbers i are anti-commuting numbers, i.e., the
anti-
commutator of any two Grassmann numbers vanishes
{i, j} [i, j]+ ij + ji = 0. (1.11)In particular, the square of
any Grassmann number is zero
2i = 0. (1.12)
One may show that any power series in N Grassmann numbers i is
a
polynomial whose highest term is proportional to the product 12
. . . N .
For instance, the most complicated power series in two Grassmann
numbers
f(1, 2) =n=0
m=0
fnmn1
m2 (1.13)
is just
f(1, 2) = f0 + f1 1 + f2 2 + f12 12. (1.14)
-
1.2 Arrays 3
1.2 Arrays
An array is an ordered set of numbers. Arrays play big roles in
computer
science, physics, and mathematics. They can be of any (integral)
dimension.
A one-dimensional array (a1, a2, . . . , an) is variously called
an n-tuple,
a row vector when written horizontally, a column vector when
written
vertically, or an n-vector. The numbers ak are its entries or
components.
A two-dimensional array aik with i running from 1 to n and k
from 1 to
m is an nm matrix. The numbers aik are called its entries,
elements,or matrix elements. One can think of a matrix as a stack
of row vectors
or as a queue of column vectors. The entry aik is in the ith row
and kth
column.
One can add together arrays of the same dimension and shape by
adding
their entries. Two n-tuples add as
(a1, . . . , an) + (b1, . . . , bn) = (a1 + b1, . . . , an + bn)
(1.15)
and two nm matrices a and b add as(a+ b)ik = aik + bik.
(1.16)
One can multiply arrays by numbers: Thus z times the
three-dimensional
array aijk is the array with entries zaijk.
One can multiply two arrays together no matter what their shapes
and
dimensions. The outer product of an n-tuple a and an m-tuple b
is an
nm matrix with elements(ab)ik = aibk (1.17)
or an m n matrix with entries (ba)ki = bkai. If a and b are
complex, thenone also can form the outer products
(a b)ik = ai bk (1.18)
and (b a)ki = bk ai. The (outer) product of a matrix aik and a
three-
dimensional array bj`m is a five-dimensional array
(ab)ikj`m = aikbj`m. (1.19)
An inner product is possible when two arrays are of the same
size in
one of their dimensions. Thus the inner product (a, b) a|b or
dotproduct a b of two real n-tuples a and b is(a, b) = a|b = a b =
(a1, . . . , an) (b1, . . . , bn) = a1b1 + + anbn. (1.20)
-
4 Linear Algebra
The inner product of two complex n-tuples is defined as
(a, b) = a|b = a b = (a1, . . . , an) (b1, . . . , bn) = a1 b1 +
+ an bn (1.21)or as its complex conjugate
(a, b) = a|b = (a b) = (b, a) = b|a = b a (1.22)so that (a, a)
0.
The product of an m n matrix aik times an n-tuple bk is the
m-tuple bwhose ith component is
bi = ai1b1 + ai2b2 + + ainbn =nk=1
aikbk (1.23)
or simply b = a b in matrix notation.If the size of the second
dimension of a matrix a matches that of the first
dimension of a matrix b, then their product ab is the matrix
with entries
(ab)i` = ai1b1` + + ainbn`. (1.24)
1.3 Matrices
Apart from n-tuples, the most important arrays in linear algebra
are the
two-dimensional arrays called matrices.
The trace of an n n matrix a is the sum of its diagonal
elements
Tr a = tr a = a11 + a22 + + ann =Ni=1
aii. (1.25)
The trace of two matrices is independent of their order
Tr (a b) =ni=1
nk=1
aikbki =nk=1
ni=1
bkiaik = Tr (ba) . (1.26)
It follows that the trace is cyclic
Tr (a b . . . z) = Tr (b . . . z a) . (1.27)
(Here we take for granted that the elements of these matrices
are ordinary
numbers that commute with each other.)
The transpose of an n ` matrix a is the ` n matrix aT with
entries(aT)ij
= aji. (1.28)
-
1.3 Matrices 5
Some mathematicians use a prime to mean transpose, as in a = aT,
butphysicists tend to use a prime to mean different . One may show
that
(a b) T = bT aT. (1.29)
A matrix that is equal to its transpose
a = aT (1.30)
is symmetric.
The (hermitian) adjoint of a matrix is the complex conjugate of
its trans-
pose (Charles Hermite, 18221901). That is, the (hermitian)
adjoint a ofan N L complex matrix a is the LN matrix with
entries
(a)ij = (aji) = aji. (1.31)
One may show that
(a b) = b a. (1.32)
A matrix that is equal to its adjoint
(a)ij = (aji) = aji = aij (1.33)
(and which therefore must be a square matrix) is said to be
hermitian or
self adjoint
a = a. (1.34)
Example: The three Pauli matrices
1 =
(0 1
1 0
), 2 =
(0 ii 0
), and 3 =
(1 0
0 1)
(1.35)
are all hermitian (Wolfgang Pauli, 19001958). A real hermitian
matrix is
symmetric. If a matrix a is hermitian, then the quadratic
form
v|a|v =ni=1
Nj=1
vi aijvj R (1.36)
is real for all complex n-tuples v.
The Kronecker delta ik is defined to be unity if i = k and zero
if i 6= k(Leopold Kronecker, 18231891). In terms of it, the nn
identity matrixI is the matrix with entries Iik = ik.
The inverse a1 of an n n matrix a is a matrix that satisfiesa1 a
= a a1 = I (1.37)
-
6 Linear Algebra
in which I is the n n identity matrix.So far we have been
writing n-tuples and matrices and their elements with
lower-case letters. It is equally common to use capital letters,
and we will
do so for the rest of this section.
A matrix U whose adjoint U is its inverse
U U = UU = I (1.38)
is unitary. Unitary matrices are square.
A real unitary matrix O is orthogonal and obeys the rule
OTO = OOT = I. (1.39)
Orthogonal matrices are square.
An N N hermitian matrix A is said to be non-negativeA 0
(1.40)
if for all complex vectors V the quadratic form
V |A|V =Ni=1
Nj=1
V i AijVj 0 (1.41)
is non-negative. A similar rule
V |A|V > 0 (1.42)for all |V defines a positive or a
positive-definite matrix (A > 0), al-though people often use
these terms to describe non-negative matrices.
Examples: The non-symmetric, non-hermitian 2 2 matrix(1 1
1 1)
(1.43)
is positive on the space of all real 2-vectors but not on the
space of all
complex 2-vectors.
The 2 2 matrix (0 11 0
)(1.44)
provides a representation of i since(0 11 0
)(0 11 0
)=
(1 00 1
)= I. (1.45)
The 2 2 matrix (0 1
0 0
)(1.46)
-
1.4 Vectors 7
provides a representation of a Grassmann number since(0 1
0 0
)(0 1
0 0
)=
(0 0
0 0
)= 0. (1.47)
To represent two Grassmann numbers one needs 4 4 matrices, such
as
1 =
0 1 0 0
0 0 0 0
0 0 0 1
0 0 0 0
and 2 =
0 0 0 0
0 0 0 0
1 0 0 0
0 1 0 0
. (1.48)
1.4 Vectors
Vectors are things that can be multiplied by numbers and added
together
to form other vectors in the same vector space. So if U and V
are vectors
in a vector space S over a set F of numbers and x and y are
numbers in F ,
then
W = xU + yV (1.49)
is also a vector in the vector space S.
A basis for a vector space S is a set of vectors Bk for k = 1 .
. . N in terms
of which every vector U in S can be expressed as a linear
combination
U = u1B1 + u2B2 + + uNBN (1.50)with numbers uk in F . These
numbers uk are the components of the vector
U in the basis Bk.
Example: Suppose the vector W represents a certain kind of
washer and
the vector N represents a certain kind of nail. Then if n and m
are natural
numbers, the vector
H = nW +mN (1.51)
would represent a possible inventory of a very simple hardware
store. The
vector space of all such vectors H would include all possible
inventories of
the store. That space is a two-dimensional vector space over the
natural
numbers, and the two vectors W and N form a basis for it.
Example: The complex numbers are a vector space. Two of its
vectors
are the number 1 and the number i; the vector space of complex
numbers is
then the set of all linear combinations
z = x1 + yi = x+ iy. (1.52)
-
8 Linear Algebra
So the complex numbers form a two-dimensional vector space over
the real
numbers, and the vectors 1 and i form a basis for it.
The complex numbers also form a one-dimensional vector space
over the
complex numbers. Here any non-zero real or complex number, for
instance
the number 1 can be a basis consisting of the single vector 1.
This one-
dimensional vector space is the set of all z = z1 for arbitrary
complex z.
Example: Ordinary flat two-dimensional space is the set of all
linear
combinations
r = xx + yy (1.53)
in which x and y are real numbers and x and y are perpendicular
vectors of
unit length (unit vectors). This vector space, called R2, is a
2-d space overthe reals.
Note that the same vector r can be described either by the basis
vectors
x and y or by any other set of basis vectors, such as y and xr =
xx + yy = y(y) + xx. (1.54)
So the components of the vector r are (x, y) in the {x, y} basis
and (y, x) inthe {y, x} basis. Each vector is unique, but its
components dependupon the basis.
Example: Ordinary flat three-dimensional space is the set of all
linear
combinations
r = xx + yy + zz (1.55)
in which x, y, and z are real numbers. It is a 3-d space over
the reals.
Example: Arrays of a given dimension and size can be added and
multi-
plied by numbers, and so they form a vector space. For instance,
all complex
three-dimensional arrays aijk in which 1 i 3, 1 j 4, and 1 k
5form a vector space over the complex numbers.
Example: Derivatives are vectors, so are partial derivatives.
For in-
stance, the linear combinations of x and y partial derivatives
taken at
x = y = 0
a
x+ b
y(1.56)
form a vector space.
Example: The space of all linear combinations of a set of
functions fi(x)
defined on an interval [a, b]
f(x) =i
zifi(x) (1.57)
-
1.5 Linear Operators 9
is a vector space over the space of the numbers {zi}.Example: In
quantum mechanics, a state is represented by a vector,
often written as or in Diracs notation as |. If c1 and c2 are
complexnumbers, and |1 and |2 are any two states, then the linear
combination
| = c1|1+ c2|2 (1.58)also is a possible state of the system.
1.5 Linear Operators
A linear operator A is a map that takes any vector U in its
domain into
another vector U = A(U) AU in a way that is linear. So if U and
V aretwo vectors in the domain of the linear operator A and b and c
are two real
or complex numbers, then
A(bU + cV ) = bA(U) + cA(V ) = bAU + cAV. (1.59)
In the most important case, the operator A maps vectors in a
vector space
S into vectors in the same space S. In this case, A maps each
basis vector
Bi for the space S into a linear combination of these basis
vectors Bk
ABi = a1iB1 + a2iB2 + + aNiBN =Nk=1
akiBk. (1.60)
The square matrix aki represents the linear operator A in the Bk
basis.
The effect of A on any vector U = u1B1 + u2B2 + + uNBN in S then
is
AU = A(
Ni=1
uiBi) =
Ni=1
uiABi =
Ni=1
ui
Nk=1
akiBk
=Nk=1
(Ni=1
akiui
)Bk. (1.61)
Thus the kth component uk of the vector U = AU is
uk = ak1u1 + ak2u2 + + akNuN =Ni=1
akiui. (1.62)
Thus the column vector u of the components uk of the vector U =
AU
is the product u = au of the matrix with elements aki that
represents thelinear operator A in the Bk basis with the column
vector with components
-
10 Linear Algebra
ui that represents the vector U in that basis. So in a given
basis, vectors
and linear operators can be identified with column vectors and
matrices.
Each linear operator is unique, but its matrix depends upon
the
basis. Suppose we change from the Bk basis to another basis
Bk
Bk =
N`=1
u`kB` (1.63)
in which the N N matrix u`k has an inverse matrix u1ki so
thatNk=1
u1ki Bk =Nk=1
u1kiN`=1
u`kB` =
N`=1
(Nk=1
u`ku1ki
)B` =
N`=1
`iB` = B
i.
(1.64)
Then the other basis vectors are given by
Bi =Nk=1
u1ki Bk (1.65)
and one may show (problem 3) that the action of the linear
operator A on
this basis vector is
ABi =N
j,k,`=1
u`jajku1ki B
` (1.66)
which shows that the matrix a that represents A in the B basis
is relatedto the matrix a that represents it in the B basis by
a`i =N
jk=1
u`jajku1ki (1.67)
which in matrix notation is simply a = u au1.Example: Suppose
the action of the linear operator A on the basis
{B1, B2} is AB1 = B2 and AB2 = 0. If the column vectors
b1 =
(1
0
)and b2 =
(0
1
)(1.68)
represent the two basis vectors B1 and B2, then the matrix
a =
(0 0
1 0
)(1.69)
would represent the linear operator A. But if we let the column
vectors
b1 =(
1
0
)and b2 =
(0
1
)(1.70)
-
1.6 Inner Products 11
represent the basis vectors
B1 =12
(B1 +B2)
B2 =12
(B1 B2) (1.71)
then the vectors
b1 =12
(1
1
)and b2 =
12
(1
1)
(1.72)
would represent B1 and B2, and so the matrix
a =1
2
(1 1
1 1)
(1.73)
would represent the linear operator A.
A linear operator A also may map a vector space S with basis Bk
into a
different vector space T with a different basis Ck. In this
case, A maps the
basis vector Bi into a linear combination of the basis vectors
Ck
ABi =Mk=1
akiCk (1.74)
and an arbitrary vector U = u1B1 + + uNBN into
AU =Mk=1
(Ni=1
akiui
)Ck. (1.75)
Well return to this point in Sections (1.14 & 1.15).
1.6 Inner Products
Most, but not all, of the vector spaces used by physicists have
an inner
product. An inner product is a function that associates a number
(f, g)
with every ordered pair of vectors f & g in the vector space
in such a way
as to satisfy these rules:
(f, g) = (g, f) (1.76)(f, z1g1 + z2g2) = z1(f, g1) + z2(f, g2)
(1.77)
(z1f1 + z2f2, g) = z1(f1, g) + z
2(f2, g) (1.78)
(f, f) 0 (1.79)in which the f s and gs are vectors and the zs
are numbers. The first two
rules require that the inner product be linear in the second
vector of the
-
12 Linear Algebra
pair and anti-linear in the first vector of the pair. (The third
rule follows
from the first two.) If, in addition, the only vector f that has
a vanishing
inner product with itself is the zero vector
(f, f) = 0 if and only if f = 0 (1.80)
then the inner product is hermitian or non degenerate; otherwise
it is
semi-definite or degenerate.
The inner product of a vector f with itself is the square of the
norm
|f | = f of the vector|f |2 = f 2= (f, f) (1.81)
and so by (1.79), the norm is well-defined as
f =
(f, f). (1.82)
The distance between two vectors f and g is the norm of their
difference
f g . (1.83)Example: The space of real vectors V with N
components Vi forms an
N -dimensional vector space over the real numbers with inner
product
(U, V ) =Ni=1
UiVi (1.84)
If the inner product (U, V ) is zero, then the two vectors are
orthogonal. If
(U,U) = 0, then
(U,U) =Ni=1
U2i = 0 (1.85)
which implies that all Ui = 0, so the vector U = 0. So this
inner product is
hermitian or non degenerate.
Example: The space of complex vectors V with N components Vi
forms an
N -dimensional vector space over the complex numbers with inner
product
(U, V ) =
Ni=1
Ui Vi (1.86)
If the inner product (U, V ) is zero, then the two vectors are
orthogonal. If
(U,U) = 0, then
(U,U) =
Ni=1
Ui Ui =Ni=1
|Ui|2 = 0 (1.87)
-
1.6 Inner Products 13
which implies that all Ui = 0, and so the vector U is zero. So
this inner
product is hermitian or non degenerate.
Example: For the vector space of N L complex matrices A, B, . .
., thetrace of the product of the adjoint (1.31) of A times B is a
natural inner
product
(A,B) = TrAB =Ni=1
Lj=1
(A)jiBij =Ni=1
Lj=1
AijBij . (1.88)
Note that (A,A) is positive
(A,A) = TrAA =Ni=1
Lj=1
AijAij =Ni=1
Lj=1
|Aij |2 0 (1.89)
and zero only when A = 0.
Two examples of degenerate or semi-definite inner products are
given in
the section (1.41) on correlation functions.
Mathematicians call a vector space with an inner product
(1.761.79) an
inner-product space, a metric space, and a pre-Hilbert
space.
A sequence of vectors fn is a Cauchy sequence if for every >
0 there
is an integer N() such that fn fm < whenever both n and m
exceedN(). A sequence of vectors fn converges to a vector f if for
every > 0
there is an integer N() such that ffn < whenever n exceeds
N(). Aninner-product space with a norm defined as in (1.82) is
complete if each of
its Cauchy sequences converges to a vector in that space. A
Hilbert space
is a complete inner-product space. Every finite-dimensional
inner-product
space is complete and so is a Hilbert space. But the term
Hilbert space
more often is used to describe infinite-dimensional complete
inner-product
spaces, such as the space of all square-integrable functions
(David Hilbert,
18621943).
Example 1.1 (The Hilbert Space of Square-Integrable Functions)
For the
vector space of functions (1.57), a natural inner product is
(f, g) =
badx f(x)g(x). (1.90)
The squared norm f of a function f(x) is
f 2= badx |f(x)|2. (1.91)
A function is said to be square integrable if its norm is
finite. The space of
-
14 Linear Algebra
all square-integrable functions is an inner-product space; it is
also complete
and so is a Hilbert space.
1.7 Schwarz Inequality
Since by (1.79) the inner product of a vector with itself cannot
be negative,
it follows that for any vectors f and g and any complex number z
= x+ iy
the inner product
P (x, y) = (f +zg, f+zg) = (f, f)+zz(g, g)+z(g, f)+z(f, g) 0
(1.92)is positive or zero. It even is non-negative at its minimum,
which we may
find by differentiation
0 =P (x, y)
x=P (x, y)
y(1.93)
to be at
x = Re(f, g)/(g, g) & y = Im(f, g)/(g, g) (1.94)as long as
(g, g) > 0. If we substitute these values into Eq.(1.92), then
we
arrive at the relation
(f, f)(g, g) |(f, g)|2 (1.95)which is called variously the
Cauchy-Schwarz inequality and the Schwarz
inequality. Equivalently
f g |(f, g)|. (1.96)If the inner product is degenerate and (g,
g) = 0, then the non-negativity of
(f + zg, f + zg) implies that (f, g) = 0, in which case the
Schwarz inequality
is trivially satisfied.
Example: For the dot-product of two real 3-vectors r & R,
the Cauchy-
Schwarz inequality is
(r r) (R R) (r R)2 = (r r) (R R) cos2 (1.97)where is the angle
between r and R.
Example: For two real n-vectors x and y, the Schwarz inequality
is
(x x) (y y) (x y)2 = (x x) (y y) cos2 (1.98)and it implies
(problem 5) that
x+ y x+ y. (1.99)
-
1.8 Linear Independence and Completeness 15
Example: For two complex n-vectors u and v, the Schwarz
inequality is
(u u) (v v) |u v|2 = (u u) (v v) cos2 (1.100)and it implies
(problem 6) that
u+ v u+ v. (1.101)Example: For the inner product (1.90) of two
complex functions f and
g, the Schwarz inequality is badx |f(x)|2
badx |g(x)|2
badx f(x)g(x)
2 . (1.102)
1.8 Linear Independence and Completeness
A set of N vectors Vi is linearly dependent if there exist
numbers ci, not
all zero, such that the linear combination ciVi vanishes
Ni=1
ciVi = 0. (1.103)
A set of vectors Vi is linearly independent if it is not
linearly dependent.
A set {Vi} of linearly independent vectors is maximal in a
vector spaceS if the addition of any other vector V S to the set
{Vi} makes the set{V, Vi} linearly dependent.
A set {Vi} of N linearly independent vectors that is maximal in
a vectorspace S spans that space. For if V is any vector in S (and
not one of the
vectors Vi), then the set {V, Vi} linearly dependent. Thus there
are numbersc, ci, not all zero, that make the sum
cV +Ni=1
ciVi = 0 (1.104)
vanish. Now if c were 0, then the set {Vi} would be linearly
dependent.Thus c 6= 0, and so we may divide by it and express the
arbitrary vector Vas a linear combination of the vectors Vi
V = 1c
Ni=1
ciVi. (1.105)
So the set of vectors {Vi} spans the space S; it is a complete
set of vectorsin the space S.
-
16 Linear Algebra
A set of vectors {Vi} that is complete in a vector space S is
said to providea basis for that space because the set affords a way
to expand an arbitrary
vector in S as a linear combination of the basis vectors {Vi}.
If the vectorsof basis are linearly dependent, then at least one of
them is superfluous; thus
it is convenient to have the vectors of a basis be linearly
independent.
1.9 Dimension of a Vector Space
Suppose {Vi|i = 1 . . . N} and {Ui|i = 1 . . .M} are two sets of
N and Mmaximally linearly independent vectors in a space S. Then N
= M .
Suppose M < N . Since the U s are complete, as explained in
Sec. 1.8, we
may express each of the N vectors Vi in terms of the M vectors
Uj
Vi =Mj=1
AijUj . (1.106)
Let Aj be the vector with components Aij ; there are M < N
such vectors,
and each has N > M components. So it is always possible to
find a non-
zero N -dimensional vector C with components ci that is
orthogonal to all
M vectors Aj :
Ni=1
ciAij = 0. (1.107)
But then the linear combination
Ni=1
ciVi =Ni=1
Mj=1
ciAij Uj = 0 (1.108)
vanishes, which would imply that the N vectors Vi were linearly
dependent.
Since these vectors are by assumption linearly independent, it
follows that
N M .Similarly, one may show that M N . Thus M = N .The number N
of vectors in a maximal linearly independent set of a vector
space S is the dimension of the vector space. Any N linearly
independent
vectors in an N -dimensional space forms a basis for it.
1.10 Orthonormal Vectors
Suppose the vectors {Vi|i = 1 . . . N} are linearly independent.
Then we maymake out of them a set of N vectors Ui that are
orthonormal
(Ui, Uj) = ij . (1.109)
-
1.10 Orthonormal Vectors 17
Procedure (Gramm-Schmidt): We set
U1 =V1
(V1, V1)(1.110)
So the first vector U1 is normalized.
Next we set
u2 = V2 + c12U1 (1.111)
and require that u2 be orthogonal to U1
0 = (U1, u2) = (U1, c12U1 + V2) = c12 + (U1, V2) (1.112)
whence c12 = (U1, V2), and sou2 = V2 (U1, V2)U1. (1.113)
The normalized vector U2 then is
U2 =u2
(u2, u2). (1.114)
Similarly, we set
u3 = V3 + c13U1 + c23U2 (1.115)
and ask that u3 be orthogonal both to U1
0 = (U1, u3) = (U1, c13U1 + c23U2 + V3) = c13 + (U1, V3)
(1.116)
and to U2
0 = (U2, u3) = (U2, c13U1 + c23U2 + V3) = c23 + (U2, V3)
(1.117)
whence ci3 = (Ui, V3) for i = 1 & 2, and sou3 = V3 (U1,
V3)U1 (U2, V3)U2. (1.118)
The normalized vector U3 then is
U3 =u3
(u3, u3). (1.119)
We may continue in this way until we reach the last of the N
linearly
independent vectors. We require the kth unnormalized vector
uk
uk = Vk +k1i=1
cikUi. (1.120)
-
18 Linear Algebra
to be orthogonal to the k 1 vectors Ui and find that cik = (Ui,
Vk) sothat
uk = Vk k1i=1
(Ui, Vk)Ui. (1.121)
The normalized vector then is
Uk =uk
(uk, uk). (1.122)
In general, a basis is more useful if it is composed of
orthonormal vectors.
1.11 Outer Products
From any two vectors f and g, we may make an operator A that
takes any
vector h into the vector f with coefficient (g, h)
Ah = f(g, h). (1.123)
It is easy to show that A is linear, that is that
A(zh+ we) = zAh+ wAe (1.124)
for any vectors e, h and numbers z, w.
Example: If f and g are vectors with components fi and gi, and h
has
components hi, then the linear transformation is
(Ah)i =Nj=1
Aijhj = fi
Nj=1
gjhj (1.125)
so A is a matrix with entries
Aij = figj . (1.126)
The matrix A is the outer product of the vectors f and g.
1.12 Dirac Notation
Such outer products are important in quantum mechanics, and so
Dirac
invented a notation for linear algebra that makes them easy to
write. In his
notation, the outer product A of Eqs.(1.1231.126) is
A = |fg| (1.127)
-
1.12 Dirac Notation 19
and the inner product (g, h) is
(g, h) = g|h. (1.128)He called g| a bra and |h a ket, so that
g|h is a bracket. In hisnotation Eq.(1.123) reads
A|h = |fg|h. (1.129)The new thing in Diracs notation is the bra
f |. If the ket |f is repre-
sented by the vector
|f =
z1z2z3z4
(1.130)then the bra f | is represented by the adjoint of that
vector
f | = (z1 , z2 , z3 , z4) . (1.131)In the standard notation,
bras are implicit in the definition of the inner
product, but they do not appear explicitly.
In Diracs notation, the rules that a hermitian inner product
(1.761.80)
satisfies are:
f |g = g|f (1.132)f |z1g1 + z2g2 = z1f |g1+ z2f |g2 (1.133)z1f1
+ z2f2|g = z1f1|g+ z2f2|g (1.134)
f |f 0 (1.135)f |f = 0 if and only if f = 0. (1.136)
Usually, however, states in Dirac notation are labeled | or by
their quan-tum numbers |n, l,m, and so one rarely sees plus signs
or complex numbersor operators inside bras or kets. But one
should.
Diracs notation allows us to write outer products clearly and
simply.
Example: If the vectors f = |f and g = |g are
|f = ab
c
and |g = ( zw
)(1.137)
then their outer products are
|fg| =az awbz bwcz cw
and |gf | = (za zb zcwa wb wc
)(1.138)
-
20 Linear Algebra
as well as
|ff | =aa ab acba bb bcca cb cc
and |gg| = (zz zwwz ww
). (1.139)
Example: In Dirac notation, formula (1.121) is
|uk = |Vk k1i=1
|UiUi|Vk (1.140)
or
|uk =(I
k1i=1
|UiUi|)|Vk (1.141)
and (1.122) is
|Uk = |ukuk|uk . (1.142)
1.13 Identity Operators
Dirac notation provides a neat way of representing the identity
operator I in
terms of a complete set of orthonormal vectors. First, in
standard notation,
the expansion of an arbitrary vector f in a space S in terms of
a complete
set of N orthonormal vectors ei
(ej , ei) = ij (1.143)
is
f =
Ni=1
ci ei (1.144)
from which we conclude that
(ej , f) = (ej ,
Ni=1
ciei) =
Ni=1
ci(ej , ei) =
Ni=1
ciij = cj (1.145)
whence
f =
Ni=1
(ei, f) ei =
Ni=1
ei (ei, f). (1.146)
The derivation stops here because there is no explicit
expression for a bra.
-
1.13 Identity Operators 21
But in Dirac notation, these equations read
ej |ei = ij (1.147)
|f =Ni=1
ci |ei (1.148)
ej |f = ej |Ni=1
ciei =Ni=1
ciej |ei =Ni=1
ciij = cj (1.149)
|f =Ni=1
ei|f |ei =Ni=1
|ei ei|f. (1.150)
(1.151)
We now rewrite the last equation as
|f =(
Ni=1
|ei ei|)|f. (1.152)
Since this equation holds for every vector |f, the quantity
inside the paren-theses must be the identity operator
I =Ni=1
|ei ei|. (1.153)
Because one always may insert an identity operator anywhere, and
because
the formula is true for every complete set of orthonormal
vectors, the reso-
lution (1.153) of the identity operator is extremely useful.
By twice inserting the identity operator (1.153), one may
convert a general
inner product (g,Af) = g|A|f into an expression involving a
matrix Aijthat represents the linear operator A
g|A|f = g|IAI|f
=
Ni,j=1
g|eiei|A|ejej |f (1.154)
In the basis {|ek}, the matrix Aij that represents the linear
oper-ator A is
Aij = ei|A|ej (1.155)and the components of the vectors |f and |g
are
fi = ei|fgi = ei|g. (1.156)
-
22 Linear Algebra
In this basis, the inner product (g,Af) = g|A|f takes the
form
g|A|f =N
i,j=1
giAijfj . (1.157)
1.14 Vectors and Their Components
Usually, the components vk of a vector |v are the inner
productsvk = k|v (1.158)
of the vector |v with a set of orthonormal basis vectors |k.
Thus thecomponents vk of a vector |v depend on both the vector and
the basis. Avector is independent of the basis used to compute its
components,
but its components depend upon the chosen basis.
If the basis is orthonormal and so provides for the identity
operator I the
expansion
I =
Nk=1
|kk| (1.159)
then the components vk of the vector |v are the coefficients in
its expansionin terms of the basis vectors |k
|v = I|v =Nk=1
|kk|v =Nk=1
vk|k. (1.160)
1.15 Linear Operators and Their Matrices
A linear operator A maps vectors into vectors linearly as in Eq.
(1.59)
A(bU + cV ) = bA(U) + cA(V ) = bAU + cAV. (1.161)
In the simplest and most important case, the linear operator A
maps the
vectors of a vector space S into vectors in the same space S. If
the space S
is N -dimensional, then it maps the vectors |i of any basis {|i}
for S intovectors A|i |Ai that can be expanded in terms of the same
basis {|k}
A|i = |Ai =Nk=1
Aki|k. (1.162)
The N N matrix with entries Aki represents the linear operator
A
-
1.15 Linear Operators and Their Matrices 23
in the basis {|i}. Because A is linear, its action on an
arbitrary vector|C = Ni=1Ci |i in S is
A|C = A(
Ni=1
Ci |i)
=
Ni=1
CiA |i =Nk=1
Ni=1
AkiCi |k. (1.163)
Thus the coefficients (AC)k of the vector A|C |AC in the
expansion
A|C = |AC =Nk=1
(AC)k |k (1.164)
are given by the matrix multiplication of the vector C with
elements Ci by
the matrix A with entries Aki
(AC)k =Ni=1
AkiCi. (1.165)
Both the elements Ci of the vector C and the entries Aki of
the
matrix A depend upon the basis {|i} one chooses to use.If the
vectors {|i} are orthonormal, then the elements C` and A`i are
`|C =Ni=1
Ci `|i =Ni=1
Ci `i = C`
`|A|i =Nk=1
Aki `|k =Nk=1
Aki `k = A`i. (1.166)
In the more general case, the linear operator A maps vectors in
a vector
space S into vectors in a different vector space S. Now A maps
an orthonor-mal basis {|i} for S into vectors A|i that may be
expanded in terms of anorthonormal basis {|k}
A|i =N k=1
Aki |k. (1.167)
If the N vectors A|i are linearly independent, then N = N , but
if theyare linearly dependent or if some of them are zero, then N
< N . Theelements A`i of the matrix that represents the linear
operator A
now are
8`|A|i =N k=1
Aki8`|k =
N k=1
Aki `k = A`i. (1.168)
They depend on both bases {|i} and {|k}. So although the
linear
-
24 Linear Algebra
operator is basis independent, the matrices that represent it
vary with the
chosen bases.
So far we have mostly been talking about linear operators that
act on
finite-dimensional vector spaces and that can be represented by
matrices.
But infinite-dimensional vector spaces and the linear operators
that act on
them play central roles in electrodynamics and quantum
mechanics. For
instance, the Hilbert space H of all wave functions (x, t) that
are squareintegrable over three-dimensional space at all times t is
of (very) infinite
dimension. An example in one space dimension of a linear
operator that
maps (a subspace of) H to H is the hamiltonian H for a
non-relativisticparticle of mass m in a potential V
H = ~2
2m
d2
dx2+ V (x). (1.169)
It maps the state vector | with components x| = (x) into the
vectorH| with components
x|H| = H(x) = ~2
2m
d2(x)
dx2+ V (x)(x) (1.170)
where ~ = 1.05 1034 Js. Translations in space and timeUT (a,
b)(x, t) = (x + a, t+ b) (1.171)
and rotations in space
UR()(x, t) = (R()x, t) (1.172)
are also represented by linear operators acting on vector spaces
of infinite
dimension. As well see in what follows, these linear operators
are unitary.
We may think of linear operators that act on vector spaces of
infinite di-
mension as infinite-dimensional matrices or as matrices of
continuously
infinite dimension, the latter really being integral operators
like
H =
dp
dp |pp|H|pp|. (1.173)
Thus we may carry over to spaces of infinite dimension most of
our intuition
about matricesas long as we use common sense and keep in mind
that
infinite sums and integrals do not always converge to finite
numbers.
1.16 Determinants
The determinant of a 2 2 matrix A isdetA = |A| = A11A22 A21A12.
(1.174)
-
1.16 Determinants 25
In terms of the antisymmetric matrix eij = eji (which implies
that e11 =e22 = 0) with e12 = 1, this determinant is
detA =2i=1
2j=1
eijAi1Aj2. (1.175)
Its also true that
ek` detA =
2i=1
2j=1
eijAikAj`. (1.176)
These definitions and results extend to any square matrix. If A
is a 3 3matrix, then its determinant is
detA =3
ijk=1
eijkAi1Aj2Ak3 (1.177)
in which eijk is totally antisymmetric with e123 = 1 and the
sums over i, j,
& k run from 1 to 3. More explicitly, this determinant
is
detA =3
ijk=1
eijkAi1Aj2Ak3
=
3i=1
Ai1
3jk=1
eijkAj2Ak3
= A11 (A22A33 A32A23) +A21 (A32A13 A12A33)+A31 (A12A23 A22A13) .
(1.178)
This sum involves the 2 2 determinants of the matrices that
result whenwe strike out column 1 and row i, which are called
minors, multiplied by
(1)1+i
detA = A11(1)2 (A22A33 A32A23) +A21(1)3 (A12A33 A32A13)+A31(1)4
(A12A23 A22A13) (1.179)
=
3i=1
Ai1Ci1. (1.180)
These minors multiplied by (1)1+i are called cofactors:C11 =
A22A33 A23A32C21 = (A12A33 A32A13)C31 = A12A23 A22A13. (1.181)
-
26 Linear Algebra
This way of computing determinants is due to Laplace.
Example: The determinant of a 3 3 matrix is the dot product of
thevector of its first row with the cross-product of the vectors of
its second and
third rows:U1 U2 U3V1 V2 V3W1 W2 W3
=3
ijk=1
eijkUiVjWk =
3i=1
Ui(V W )i = U (V W ).
(1.182)
Totally antisymmetric quantities ei1i2...iN with N indices and
with e123...N =
1 provide a definition of the determinant of an N N matrix A
as
detA =N
i1i2...iN=1
ei1i2...iNAi11Ai22 . . . AiNN (1.183)
in which the sums over i1 . . . iN run from 1 to N . The general
form of
Laplaces expansion of this determinant is
detA =Ni=1
AikCik =Nk=1
AikCik (1.184)
in which the first sum is over the row index i but not the
(arbitrary) col-
umn index k, and the second sum is over the column index k but
not the
(arbitrary) row index i. The cofactor Cik is (1)i+kMik in which
the minorMik is the determinant of the (N 1) (N 1) matrix A without
its ithrow and kth column.
Incidentally, its also true that
ek1k2...kN detA =N
i1i2...iN=1
ei1i2...iNAi1k1Ai2k2 . . . AiNkN . (1.185)
The key feature of a determinant is that it is an antisymmetric
combina-
tion of products of the elements Aik of a matrix A. One
implication of this
antisymmetry is that the interchange of any two rows or any two
columns
changes the sign of the determinant. Another is that if one adds
a multiple
of one column to another column, for example a multiple xAi2 of
column 2
to column 1, then the determinant
detA =N
i1i2...in=1
ei1i2...iN (Ai11 + xAi12)Ai22 . . . AiNN (1.186)
-
1.16 Determinants 27
is unchanged. The reason is that the extra term detA
vanishes
detA =N
i1i2...iN=1
x ei1i2...iN Ai12Ai22 . . . AiNN = 0 (1.187)
because it is proportional to a sum of products of a factor
ei1i2...iN that is
antisymmetric in i1 and i2 and a factor Ai12Ai22 that is
symmetric in these
indices. For instance, when i1 and i2 are 5 & 7 and 7 &
5, the two terms
cancel
e57...iNA52A72 . . . AiNN + e75...iNA72A52 . . . AiNN = 0
(1.188)
because e57...iN = e75...iN .By repeated additions of x2Ai2,
x3Ai3, etc. to Ai1, we can change the
first column of the matrix A to a nearly arbitrary linear
combination of all
the columns
Ai1 Ai1 +Nk=2
xkAik (1.189)
without changing detA. This linear combination is not completely
arbitrary
because the coefficient of Ai1 remains unity. The analogous
operation
Ai` Ai` +N
k=1,k 6=`ykAik (1.190)
replaces the `th column by a nearly arbitrary linear combination
of all the
columns without changing detA.
The key concepts of linear dependence and independence were
explained
in Sec. 1.8. Suppose that the columns of an N N matrix A are
linearlydependent, so that for some coefficients yk not all zero
the linear combination
Nk=1
ykAik = 0 i (1.191)
vanishes for all i (the upside-down A means for all). Suppose y1
6= 0. Thenby adding suitable linear combinations of columns 2
through N to column
1, we could make all the elements Ai1 of column 1 vanish without
changing
detA. But then the detA as given by (1.183) would vanish. It
follows that
the determinant of any matrix whose columns are linearly
dependent must
vanish.
The converse also is true: if columns of a matrix are linearly
independent,
then the determinant of that matrix can not vanish. To see why,
let us
-
28 Linear Algebra
recall, as explained in Sec. 1.8, that any linearly independent
set of vectors
is complete. Thus if the columns of a matrix A are linearly
independent and
therefore complete, some linear combination of all columns 2
through N
when added to column 1 will convert column 1 into a (non-zero)
multiple of
the N -dimensional column vector (1, 0, 0, . . . 0), say (c1, 0,
0, . . . 0). Similar
operations will convert column 2 into a (non-zero) multiple of
the column
vector (0, 1, 0, . . . 0), say (0, c2, 0, . . . 0). Continuing
in this way, we may
convert the matrix A to a matrix with non-zero entries along the
main
diagonal and zeros everywhere else. The determinant detA is then
the
product of the non-zero diagonal entries c1c2 . . . cN 6= 0, and
so detA cannot vanish.
We may extend these arguments to the rows of a matrix. The
addition
to row k of a linear combination of the other rows
Aki Aki +N
`=1,` 6=kz`A`i (1.192)
does not change the value of the determinant. In this way, one
may show
that the determinant of a matrix vanishes if and only if its
rows are linearly
dependent. The reason why these results apply to the rows as
well as to
the columns is that the determinant of a matrix A may be defined
either in
terms of the columns as in definitions (1.183) & 1.185) or
in terms of the
rows:
detA =
Ni1i2...iN=1
ei1i2...iNA1i1A2i2 . . . ANiN (1.193)
ek1k2...kN detA =
Ni1i2...iN=1
ei1i2...iNAk1i1Ak2i2 . . . AkN iN . (1.194)
These and many other properties of determinants follow from a
study of
permutations, which are discussed in Section 10.13. Detailed
proofs can
be found in the book by Aitken (Aitken, 1959).
By comparing the row (1.183) & 1.185) and (1.193 &
1.194) column def-
initions of determinants, we see that the determinant of the
transpose of a
matrix is the same as the determinant of the matrix itself:
detAT = detA. (1.195)
Let us return for a moment to Laplaces expansion (1.184) for the
deter-
minant detA of an N N matrix A as a sum of AikCik over the row
index
-
1.16 Determinants 29
i with the column index k held fixed
detA =Ni=1
AikCik (1.196)
in order to prove that
k` detA =
Ni=1
AikCi`. (1.197)
For k = `, this formula just repeats Laplaces expansion (1.196).
But for
k 6= `, it is Laplaces expansion for the determinant of a matrix
A thatis the same as A but with its `th column replaced by its kth
one. Since
the matrix A has two identical columns, its determinant
vanishes, whichexplains (1.197) for k 6= `.
The rule (1.197) therefore provides a formula for the inverse of
a matrix A
whose determinant does not vanish. Such matrices are called
nonsingular.
The inverse A1 of an N N nonsingular matrix A is the transpose
of thematrix of cofactors divided by detA(
A1)`i
=Ci`
detAor A1 =
CT
detA. (1.198)
To verify this formula, we use it for A1 in the product A1A and
note thatby (1.197) the `kth entry of the product A1A is just
`k(
A1A)`k
=Ni=1
(A1
)`iAik =
Ni=1
Ci`detA
Aik = `k (1.199)
as required.
Example: Lets apply our formula (1.198) to find the inverse of
the
general 2 2 matrixA =
(a b
c d
). (1.200)
We find then
A1 =1
ad bc(d bc a
)(1.201)
which is the correct inverse.
The simple example of matrix multiplicationa b cd e fg h i
1 x y0 1 z0 0 1
=a xa+ b ya+ zb+ cd xd+ e yd+ ze+ fg xg + h yg + zh+ i
(1.202)
-
30 Linear Algebra
shows that the operations (1.190) on columns that dont change
the value
of the determinant can be written as matrix multiplication from
the right
by a matrix that has unity on its main diagonal and zeros
below.
Now imagine that A and B are NN matrices and consider the
2N2Nmatrix product (
A 0
I B)(
I B
0 I
)=
(A AB
I 0)
(1.203)
in which I is theNN identity matrix, and 0 is theNN matrix of
all zeros.The second matrix on the left-hand side has unity on its
main diagonal and
zeros below, and so it does not change the value of the
determinant of the
matrix to its left, which thus is equal to that of the matrix on
the right-hand
side:
det
(A 0
I B)
= det
(A AB
I 0). (1.204)
By using Laplaces expansion (1.184) along the first column to
evaluate the
determinant on the left-hand side (LHS) and Laplaces expansion
(1.184)
along the last row to compute the determinant on the right-hand
side (RHS),
one may derive the general and important rule that the
determinant of
the product of two matrices is the product of the
determinants
detA detB = detAB. (1.205)
Example: The case in which the matrices A and B are both 2 2
iseasy to understand. The LHS of Eq.(1.204) gives
det
(A 0
I B)
= det
a11 a12 0 0
a21 a22 0 0
1 0 b11 b120 1 b21 b22
(1.206)= a11a22 detB a21a12 detB = detAdetB
while its RHS comes to
det
(A AB
I 0)
= det
a11 a12 ab11 ab12a21 a22 ab21 ab221 0 0 00 1 0 0
= (1)C42 = (1)(1) detAB = detAB. (1.207)
Often one uses an absolute-value notation to denote a
determinant, |A| =
-
1.16 Determinants 31
detA. In this more compact notation, the obvious generalization
of the
product rule is
|ABC . . . Z| = |A||B| . . . |Z|. (1.208)The product rule
(1.208) implies that the determinant of A1 is the inverse
of |A| since1 = |I| = |AA1| = |A||A1|. (1.209)
Incidentally, Gauss, Jordan, and others have developed much
faster ways
of computing determinants and matrix inverses than those (1.184
& 1.198)
due to Laplace. Octave, Matlab, Maple, and Mathematica use these
more
modern techniques, which also are freely available as programs
in C and
fortran from www.netlib.org/lapack.
Numerical Example: Adding multiples of rows to other rows does
not
change the value of a determinant, and interchanging two rows
only changes
a determinant by a minus sign. So we can use these operations,
which leave
determinants invariant, to make a matrix upper triangular, a
form in
which its determinant is just the product of the factors on its
diagonal. For
instance, to make the matrix
A =
1 2 12 6 34 2 5
(1.210)upper triangular, we add twice the first row to the
second row1 2 10 2 5
4 2 5
(1.211)and then subtract four times the first row from the
third1 2 10 2 5
0 6 9
. (1.212)Next, we subtract three times the second row from the
third1 2 10 2 5
0 0 24
. (1.213)We now find as the determinant of A the product of its
diagonal elements:
|A| = 1(2)(24) = 48. (1.214)The Matlab command is d =
det(A).
-
32 Linear Algebra
1.17 Systems of Linear Equations
Suppose we wish to solve the system of linear equations
Nk=1
Aikxk = yi (1.215)
for the N unknowns xk. In matrix notation, with A an N N matrix
andx and y N -vectors, this system of equations is
Ax = y. (1.216)
If the matrix A is non-singular, that is, if det(A) 6= 0, then
it has aninverse A1 given by (1.198), and we may multiply both
sides of (1.216) byA1 and so find x as
x = Ix = A1Ax = A1y. (1.217)
When A is non-singular, this is the unique solution to
(1.215).
When A is singular, det(A) = 0, and so its columns are linearly
dependent
as explained in Sec. 1.16. In this case, the linear dependence
of the columns
of A implies that Az = 0 for some non-zero vector z, and so if x
is a
solution, then Ax = y implies that x + cz for all c is also a
solution since
A(x + cz) = Ax + cAz = Ax = y. So if det(A) = 0, then there may
be
solutions, but there can be no unique solution. Whether equation
(1.215)
has any solutions when det(A) = 0 depends on whether the vector
y can be
expressed as a linear combination of the columns of A. Since
these columns
are linearly dependent, they span a subspace of fewer than N
dimensions,
and so (1.215) has solutions only when the N -vector y lies in
that subspace.
A system of M equations
Nk=1
Aikxk = yi for i = 1, 2, . . . ,M (1.218)
in N , more than M , unknowns is under-determined. As long as at
least
M of the N columns Aik of the matrix A are linearly independent,
such a
system always has solutions, but they are not unique.
1.18 Linear Least Squares
Suppose we are confronted with a system of M equations
Nk=1
Aikxk = yi for i = 1, 2, . . . ,M (1.219)
-
1.18 Linear Least Squares 33
in fewer unknowns N < M . This problem is over-determined. In
general,
it has no solution, but it does have an approximate solution due
to Carl
Gauss (17771855).
If the matrix A and the vector y are real, then Gausss solution
is the N
values xk that minimize the sum of the squares of the errors
E =Mi=1
(yi
Nk=1
Aikxk
)2. (1.220)
The minimizing values x` make the N derivatives of E vanish
E
x`= 0 =
Mi=1
2
(yi
Nk=1
Aikxk
)(Ai`) (1.221)
so in matrix notation
ATy = ATAx. (1.222)
Since A is real, the matrix of the form ATA is non-negative
(1.41); if it also
is positive (1.42), then it has an inverse, and our
least-squares solution
is
x =(ATA
)1ATy. (1.223)
If the matrix A and the vector y are complex, and if the matrix
AA ispositive, then one may show (problem 16) that minimization of
the sum of
the squares of the absolute values of the errors gives
x =(AA
)1Ay. (1.224)
Example from biophysics: If the wavelength of visible light were
a
nanometer, microscopes would yield much sharper images. Each
photon
from a (single-molecule) fluorofore entering the lens of a
microscope would
follow ray optics and be focused within a tiny circle of about a
nanometer
on a detector. Instead, a photon that should arrive at x = (x1,
x2) ar-
rives at yi = (y1i, y2i) according to an approximately gaussian
probability
distribution
P (yi) = c e(yix)2/(22) (1.225)
in which c is a normalization constant and is about 150 nm. What
to do?
Keith Lidke and his merry band of biophysicists collect about N
= 500
-
34 Linear Algebra
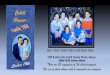
Figure 1.1 Conventional (left, fuzzy) and STORM (right, sharp)
imagesof microtubules. The tubulin is labeled with a fluorescent
anti-tubulinantibody. The white rectangles are 1 micron in length.
Images courtesy ofKeith Lidke.
points yi and determine the point x that maximizes the joint
probability of
the ensemble of image points
P =
Ni=1
P (yi) = cN
Ni=1
e(yix)2/(22) = cN exp
[
Ni=1
(yi x)2/(22)]
(1.226)
by solving for k = 1 and 2 the equations
P
xk= 0 = P
P
xk
[
Ni=1
(yi x)2/(22)]
=P
2
Ni=1
(yik xk) . (1.227)
Thus this maximum likelihood estimate of the image point x is
the
average of the observed points yi
x =1
N
Ni=1
yi. (1.228)
Their stochastic optical reconstruction microscopy (STORM) is
more
complicated because they also account for the finite accuracy of
their detec-
tor.
Microtubules are long hollow tubes made of the protein tubulin.
They
are 25 nm in diameter and typically have one end attached to a
centrosome.
Together with actin and intermediate filaments, they form the
cytoskeleton
of a eukaryotic cell. Fig. 1.1 shows conventional (left, fuzzy)
and STORM
-
1.19 The Adjoint of an Operator 35
(right, sharp) images of microtubules. The fluorophore attaches
at a random
point on an anti-tubulin antibody of finite size, which binds to
the tubulin
of a microtubule. This spatial uncertainty and the motion of the
molecules
of living cells limits the improvement in resolution is by a
factor of 10 to 20.
1.19 The Adjoint of an Operator
The adjoint A of a linear operator A is defined by
(g,Af) = (Ag, f) = (f,A g). (1.229)
Equivalent expressions in Dirac notation are
g|Af = g|A|f = Ag|f = f |Ag = f |A|g. (1.230)So if the vectors
{ei} are orthonormal and complete in a space S, then
with f = ej and g = ei, the definition (1.229) or (1.230) of the
adjoint A
of a linear operator A implies
ei|A|ej = ej |A|ei (1.231)or (
A)ij
= (Aji) = Aji (1.232)
in agreement with our definiton (1.31) of the adjoint of a
matrix as the
transpose of its complex conjugate
A = AT. (1.233)
Since both (A) = A and (AT)T = A, it follows that(A)
=(AT
) T = A (1.234)so the adjoint of an adjoint is the original
operator.
By applying this rule (1.234) to the definition (1.229) of the
adjoint, we
find the related rule
(g,Af) = (g,Af) = (Ag, f). (1.235)
1.20 Self-Adjoint or Hermitian Linear Operators
An operator A that is equal to its adjoint
A = A (1.236)
-
36 Linear Algebra
is self adjoint or hermitian. In view of definition (1.229), a
self-adjoint
linear operator A satisfies
(g,A f) = (Ag, f) = (f,A g) (1.237)
or equivalently
g|A |f = Ag|f = f |Ag = f |A |g. (1.238)By Eq.(1.232), a
hermitian operator A that acts on a finite-dimensional
vector space is represented in an orthonormal basis by a matrix
that is
equal to the transpose of its complex conjugate
Aij = (A)ij =(A)ij
= (Aji) = Aji. (1.239)
Such matrices are said to be hermitian. Conversely, a linear
operator that
is represented by a hermitian matrix in an orthonormal basis is
self adjoint
(problem 17).
A matrix Aij that is real and symmetric or imaginary and
anti-
symmetric is hermitian. But a self-adjoint linear operator A
that is rep-
resented by a matrix Aij that is real and symmetric (or
imaginary and
anti-symmetric) in one orthonormal basis will not in general be
represented
by a matrix that is real and symmetric (or imaginary and
anti-symmetric)
in a different orthonormal basis, but it will be represented by
a hermitian
matrix in every orthonormal basis.
As well see in section (1.30), hermitian matrices have real
eigenvalues
and complete sets of orthonormal eigenvectors. Hermitian
operators and
matrices represent physical variables in quantum mechanics.
1.21 Real, Symmetric Linear Operators
In quantum mechanics, we usually consider complex vector spaces,
that is,
spaces in which the vectors |f are complex linear
combinations
|f =Ni=1
zi |i (1.240)
of complex orthonormal basis vectors |i.But real vector spaces
also are of interest. A real vector space is a vector
space in which the vectors |f are real linear combinations
|f =Nn=1
xn |n (1.241)
-
1.22 Unitary Operators 37
of real orthonormal basis vectors, xn = xn and |n = |n.A real
linear operator A on a real vector space
A =N
n,m=1
|nn|A|mm| =N
n,m=1
|nAnmm| (1.242)
is represented by a real matrix Anm = Anm. A real linear
operator A that isself adjoint on a real vector space satisfies the
condition (1.237) of hermiticity
but with the understanding that complex conjugation has no
effect
(g,A f) = (Ag, f) = (f,A g) = (f,A g). (1.243)
Thus, its matrix elements are symmetric: g|A|f = f |A|g. Since A
ishermitian as well as real, the matrix Anm that represents it (in
a real basis)
is real and hermitian, and so is symmetric
Anm = Amn = Amn. (1.244)
1.22 Unitary Operators
A unitary operator U is one whose adjoint is its inverse
U U = U U = I. (1.245)
In general, the unitary operators well consider also are linear,
that is
U (z|+ w|) = zU |+ wU | (1.246)for all states or vectors | and |
and all complex numbers z and w.
In standard notation, U U = I implies that for any vectors f and
g
(g, f) = (g, U Uf) = (Ug, Uf) (1.247)
as well as
(g, f) = (g, U U f) = (U g, U f). (1.248)
In Dirac notation, these equations are
g|f = g|U U |f = Ug|U |f = Ug|Uf (1.249)and
g|f = g|U U |f = U g|U |f = U g|U f. (1.250)Suppose the states
{|n} form an orthonormal basis for a given vector
space. Then if U is any unitary operator, the relations
(1.2471.250) show
-
38 Linear Algebra
that the states {U |n} also form an orthonormal basis. The
orthonormalityof the image states {U |n} follows from that of the
basis states {|n}
nm = n|m = Un|Um = n|U U |m. (1.251)The completeness relation
for the basis states {|n} is that the sum of theirdyadics is the
identity operator
n
|nn| = I (1.252)
and it implies that the images states {U |n} also are
completen
U |nn|U = UIU = UU = I. (1.253)
So a unitary matrix U maps an orthonormal basis into another
orthonor-
mal basis. In fact, any linear map from one orthonormal basis
{|n} toanother {|n} must be unitary. Such an operator will be of
the form
U =Nn=1
|nn| (1.254)
with
n|m = nm and n|m = nm. (1.255)The unitarity of such a sum is
evident:
U U =Nn=1
|nn|Nm=1
|mm|
=
Nn=1
Nm=1
|n nm m| =Nn=1
|nn| = I. (1.256)
The product U U similarly collapses to unity.Unitary matrices
have unimodular determinants. To show this, we use the
definition (1.245), that is, UU = I, and the product rule for
determinants(1.208) to write
1 = |I| = |UU | = |U ||U | = |U ||UT| = |U ||U |. (1.257)A
unitary matrix that is real is said to be orthogonal. An
orthogonal
matrix O satisfies
OOT = OTO = I. (1.258)
-
1.23 Antiunitary, Antilinear Operators 39
1.23 Antiunitary, Antilinear Operators
Certain maps on states , such as those involving time reversal,
areimplemented by operators K that are antilinear
K (z + w) = K (z|+ w|) = zK|+ wK| = zK + wK(1.259)
and antiunitary
(K,K) = K|K = (, ) = | = | = (, ) . (1.260)Dont feel bad if you
find such operators spooky. I do too.
1.24 Symmetry in Quantum Mechanics
In quantum mechanics, a symmetry is a map of states f f that
preservestheir inner products
|||2 = |||2 (1.261)and so their predicted probabilities. The
inner products of the primed and
unprimed vectors are the same.
Eugene Wigner (19021995) has shown that every symmetry in
quantum
mechanics can be represented either by an operator U that is
linear and
unitary or by an operator K that is anti-linear and
anti-unitary. The anti-
linear, anti-unitary case seems to occur only when the symmetry
involves
time-reversal; most symmetries are represented by operators U
that are lin-
ear and unitary. So unitary operators are of great importance in
quantum
mechanics. They are used to represent rotations, translations,
Lorentz trans-
formations, internal-symmetry transformations just about all
symmetries
not involving time-reversal.
1.25 Lagrange Multipliers
The maxima and minima of a function f(x) of several variables
x1, x2, . . . , xnare among the points at which its gradient
vanishes
f(x) = 0. (1.262)These are the stationary points of f .
Example 1.2 (Minimum) For instance, if f(x) = x21 + 2x22 +
3x
23, then its
minimum is at
f(x) = (2x1, 4x2, 6x3) = 0 (1.263)
-
40 Linear Algebra
that is, at x1 = x2 = x3 = 0.
But how do we find the extrema of f(x) if x must satisfy k
constraints
c1(x) = 0, c2(x) = 0, . . . , ck(x) = 0? We use Lagrange
multipliers (Joseph-
Louis Lagrange, 17361813).
In the case of one constraint c(x) = 0, we no longer expect the
gradient
f(x) to vanish, but its projectionf(x)dx must vanish in those
directionsdx that preserve the constraint. Sof(x)dx = 0 for all dx
that makec(x)dx = 0. This means that f(x) and c(x) must be
parallel. Thus, theextrema of f(x) subject to the constraint c(x) =
0 satisfy the two equations
f(x) = c(x) and c(x) = 0. (1.264)These equations define the
extrema of the unconstrained function
L(x, ) = f(x) c(x) (1.265)of the n+ 1 variables x, . . . ,
xn,
L(x, ) = f(x) c(x) = 0 and L(x, )
= c(x) = 0. (1.266)The extra variable is a Lagrange
multiplier.
In the case of k constraints c1(x) = 0, . . . , ck(x) = 0, the
projection
f dx must vanish in those directions dx that preserve all the
constraints.So f(x) dx = 0 for all dx that make all cj(x) dx = 0
for j = 1, . . . , k.The gradient f will satisfy this requirement
if its a linear combination
f = 1c1 + + kck (1.267)of the k gradients because then f dx will
vanish if cj dx = 0 forj = 1, . . . , k. The extrema also must
satisfy the constraints
c1(x) = 0, . . . , ck(x) = 0. (1.268)
Equations (1.267 & 1.268) define the extrema of the
unconstrained function
L(x, ) = f(x) 1 c1(x) + . . . k ck(x) (1.269)of the n+ k
variables x and
L(x, ) = f(x) c1(x) ck(x) = 0 (1.270)and
L(x, )
j= cj(x) = 0 j = 1, . . . , k. (1.271)
-
1.26 Eigenvectors and Invariant Subspaces 41
Example 1.3 (Constrained Extrema and Eigenvectors) Suppose we
want
to find the extrema of a real, symmetric quadratic form f(x) =
xTAx
subject to the constraint c(x) = x x 1 which says that the
vector x is ofunit length.
We form the function
L(x, ) = xTAx (x x 1) (1.272)
and since the matrix A is real and symmetric, we find its
unconstrained
extrema as
L(x, ) = 2Ax 2x = 0 and x x = 1. (1.273)
The extrema of f(x) = xTAx subject to the constraint c(x) = x x
1 arethe normalized eigenvectors
Ax = x and x x = 1. (1.274)
of the real, symmetric matrix A.
1.26 Eigenvectors and Invariant Subspaces
Let A be a linear operator that maps vectors |v in a vector
space S intovectors in the same space. If T S is a subspace of S,
and if the vectorA|u is in T whenever |u is in T , then T is an
invariant subspace of S.The whole space S is a trivial invariant
subspace of S, as is the null set .
If T S is a one-dimensional invariant subspace of S, then A maps
eachvector |u T into another vector |u T , that is
A|u = |u. (1.275)
In this case, we say that |u is an eigenvector of A with
eigenvalue .(The German adjective eigen means own, proper,
singular.)
Example: The matrix equation(cos sin
sin cos )(
1
i)
= ei(
1
i)
(1.276)
tells us that the eigenvectors of this 22 orthogonal matrix are
the 2-tuples(1,i) with eigenvalues ei.
Problem 18 is to show that the eigenvalues of a unitary (and
hence of
an orthogonal) matrix are unimodular, || = 1.
-
42 Linear Algebra
Example: Let us consider the eigenvector equation
Nk=1
AikVk = Vi (1.277)
for a matrix A that is anti-symmetric Aik = Aki. The
anti-symmetry ofA implies that
Ni,k=1
ViAikVk = 0. (1.278)
Thus the last two relations imply that
0 =N
i,k=1
ViAikVk = Ni=1
V 2i = 0. (1.279)
Thus either the eigenvalue or the dot-product of the eigenvector
with itself
vanishes.
Problem 19 is to show that the sum of the eigenvalues of an
anti-symmetric
matrix vanishes.
1.27 Eigenvalues of a Square Matrix
Let A be an N N matrix with complex entries Aik. A non-zero N
-dimensional vector V with entries Vk is an eigenvector of the
matrix A
with eigenvalue if
A|V = |V AV = V Nk=1
AikVk = Vi. (1.280)
Every N N matrix A has N eigenvectors V (`) and eigenvalues `AV
(`) = `V
(`) (1.281)
for ` = 1 . . . N . To see why, we write the top equation
(1.280) as
Nk=1
(Aik ik)Vk = 0 (1.282)
or in matrix notation as
(A I)V = 0 (1.283)in which I is the N N matrix with entries Iik
= ik. These equivalent
-
1.27 Eigenvalues of a Square Matrix 43
equations (1.282 & 1.283) say that the columns of the matrix
A I, con-sidered as vectors, are linearly dependent, as defined in
section 1.8. We saw
in section 1.16 that the columns of a matrix, AI, are linearly
dependentif and only if the determinant |A I| vanishes. Thus a
non-zero solutionof the eigenvalue equation (1.280) exists if and
only if the determinant
det (A I) = |A I| = 0 (1.284)vanishes. This requirement that the
determinant of A I vanish is calledthe characteristic equation. For
an N N matrix A, it is a polynomialequation of the Nth degree in
the unknown eigenvalue
|A I| P (,A) = |A|+ + (1)N1N1 TrA+ (1)NN
=
Nk=0
pk k = 0 (1.285)
in which p0 = |A|, pN1 = (1)N1TrA, and pN = (1)N . (All the
pksare basis independent.) By the fundamental theorem of algebra,
proved in
Sec. 5.9, the characteristic equation always has N roots or
solutions ` lying
somewhere in the complex plane. Thus, the characteristic
polynomial has
the factored form
P (,A) = (1 )(2 ) . . . (N ). (1.286)For every root `, there is
a non-zero eigenvector V
(`) whose components
V(`)k are the coefficients that make the N vectors Aik ` ik that
are the
columns of the matrix A `I sum to zero in (1.282). Thus, every N
Nmatrix has N eigenvalues ` and N eigenvectors V
(`).
Setting = 0 in the factored form (1.286) of P (,A) and in the
charac-
teristic equation (1.285), we see that the determinant of every
N Nmatrix is the product of its N eigenvalues
P (0, A) = |A| = p0 = 12 . . . N . (1.287)TheseN roots usually
are all different, and when they are, the eigenvectors
V (`) are linearly independent. This result is trivially true
for N = 1. Lets
assume its validity for N 1 and deduce it for the case of N
eigenvectors.If it were false for N eigenvectors, then there would
be N numbers c`, not
all zero, such that
N`=1
c`V(`) = 0. (1.288)
-
44 Linear Algebra
We now multiply this equation from the left by the linear
operator A and
use the eigenvalue equation (1.281)
A
N`=1
c` V(`) =
N`=1
c`AV(`) =
N`=1
c` ` V(`) = 0. (1.289)
On the other hand, the product of equation (1.288) multiplied by
N is
N`=1
c` N V(`) = 0. (1.290)
When we subtract (1.290) from (1.289), the terms with ` = N
cancel leaving
N1`=1
c` (` N )V (`) = 0 (1.291)
in which all the factors (` N ) are different from zero since by
assumptionall the eigenvalues are different. But this last equation
says that N1 eigen-vectors with different eigenvalues are linearly
dependent, which contradicts
our assumption that the result holds for N 1 eigenvectors. This
contra-diction tells us that if the N eigenvectors of an N N square
matrixhave different eigenvalues, then they are linearly
independent.
An eigenvalue ` that is a single root of the characteristic
equation (1.285)
is associated with a single eigenvector; it is called a simple
eigenvalue. An
eigenvalue ` that is an nth root of the characteristic equation
is associated
with n eigenvectors; it is said to be an n-fold degenerate
eigenvalue
or to have algebraic multiplicity n. Its geometric multiplicity
is the
number n n of linearly independent eigenvectors with eigenvalue
` . Amatrix whose eigenvectors are linearly dependent is said to be
defective.
Example: The 2 2 matrix (0 1
0 0
)(1.292)
has only one linearly independent eigenvector (1, 0)T and so is
defective.
Suppose A is an N N matrix that is not defective. We may use
itsN linearly independent eigenvectors V (`) = |` to define the
columns of anN N matrix S as
Sk` = k, 0|` (1.293)in which the vectors |k, 0 are the basis in
which Aik = i, 0|A|k, 0. The
-
1.28 A Matrix Obeys Its Characteristic Equation 45
inner product of the eigenvalue equation AV (`) = `V(`) with the
bra i, 0|
is
i, 0|A|` = i, 0|ANk=1
|k, 0k, 0|` =Nk=1
AikSk` = `Si`. (1.294)
Since the columns of S are linearly independent, the determinant
of S does
not vanishthe matrix S is nonsingularand so its inverse S1 is
well-defined by (1.198). It follows that
Ni,k=1
(S1
)niAikSk` =
Ni=1
`(S1
)niSi` = ann` = ` (1.295)
or in matrix notation
S1AS = A(d) (1.296)
in which A(d) is the diagonal form of the matrix A with its
eigenvalues `arranged along its main diagonal and zeros elsewhere.
Equation (1.296) is
a similarity transformation. Any nondefective square matrix
can
be diagonalized by a similarity transformation
A = SA(d)S1. (1.297)
By using the product rule (1.208), we see that the determinant
of any non-
defective square matrix is the product of its eigenvalues
|A| = |SA(d)S1| = |S| |A(d)| |S1| = |SS1| |A(d)| = |A(d)|
=N`=1
`
(1.298)
which is a special case of (1.287).
1.28 A Matrix Obeys Its Characteristic Equation
Every square matrix obeys its characteristic equation (1.285).
That is, the
characteristic equation
P (,A) = |A I| =Nk=0
pk k = 0 (1.299)
remains true when the matrix A replaces the unknown variable
P (A,A) =Nk=0
pk Ak = 0. (1.300)
-
46 Linear Algebra
To see why, we recall the formula (1.198) for the inverse of the
matrix
A I(A I)1 = C(,A)
T
|A I| (1.301)
in which C(,A)T is the transpose of the matrix of cofactors of
the matrix
A I. Since the determinant |A I| is the characteristic
polynomialP (,A), we have rearranging
(A I)C(,A)T = P (,A)I. (1.302)The transpose of the matrix of
cofactors of the matrix AI is a polynomialin with matrix
coefficients
C(,A)T = C0 + C1+ + CN1N1. (1.303)The LHS of equation (1.302) is
then
(A I)C(,A)T = AC0 + (AC1 C0)+ (AC2 C1)2 + . . .+ (ACN1 CN2)N1
CN1N . (1.304)
Equating equal powers of on both sides of (1.302), we have using
(1.299)
and (1.304), we have
AC0 = p0I
AC1 C0 = p1IAC2 C1 = p2I
. . . = . . . (1.305)
ACN1 CN2 = pN1ICN1 = pNI.
We now multiply on the left the first of these equations by I,
the second
by A, the third by A2, . . . , and the last by AN and then add
the resulting
equations. All the terms on the left-hand sides cancel, while
the sum of
those on the right give P (A,A). Thus the matrix A obeys its
characteristic
equation
0 =
Nk=0
pk Ak = |A| I+p1A+ +(1)N1(TrA)AN1+(1)N AN (1.306)
a result known as the Cayley-Hamilton theorem (Arthur Cayley,
1821
1895, and William Hamilton, 18051865). This derivation is due to
Israel
Gelfand (19132009) (Gelfand, 1961, pp. 8990).
-
1.29 Functions of Matrices 47
Because every N N matrix A obeys its characteristic equation,
its Nthpower AN can be expressed as a linear combination of its
lesser powers
AN = (1)N1 [|A| I + p1A+ p2A2 + + (1)N1(TrA)AN1] .(1.307)
Thus the square A2 of every 2 2 matrix is given byA2 = |A|I +
(TrA)A. (1.308)
Example 1.4 (Spin-one-half rotation matrix) If is a real
3-vector and
is the 3-vector of Pauli matrices (1.35), then the square of the
traceless
2 2 matrix A = is
( )2 = 3 1 i21 + i2 3
I = 2 I (1.309)in which 2 = . One may use this identity to show
(problem (20)) that
exp (i /2) = cos(/2) i sin(/2) (1.310)in which is a unit
3-vector. This matrix represents a right-handed rotation
of radians about the axis for a spin-one-half object.
1.29 Functions of Matrices
What sense can we make of a function f of an N N matrix A?
andhow would we compute it? One way is to use the characteristic
equation
(1.307) to express every power of A in terms of I, A, . . . ,
AN1 and thecoefficients p0 = |A|, p1, p2, . . . , pN2, and pN1 =
(1)N1TrA. Then iff(x) is a polynomial or a function with a
convergent power series
f(x) =k=0
ck xk (1.311)
in principle we may express f(A) in terms of N functions fk(p)
of the
coefficients p (p0, . . . , pN1) as
f(A) =
N1k=0
fk(p)Ak. (1.312)
The identity (1.310) for exp (i /2) is an example of this
technique forN = 2. which can become challenging for N > 3.
Example: In problem (21), one finds the characteristic equation
(1.306)
for the 33 matrix i J in which the generators are (Jk)ij = iikj
andijk is totally antisymmetric with 123 = 1. These generators
satisfy the
-
48 Linear Algebra
commutation relations [Ji, Jj ] = iijkJk in which sums over
repeated indices
from 1 to 3 are understood. In problem (22), one uses this
characteristic
equation to show that the 33 real orthogonal matrix exp(i J),
whichrepresents a right-handed rotation by radians about the axis ,
is
exp(i J) = cos I i J sin + (1 cos ) ()T (1.313)or in terms of
indices
exp(i J)ij = ij cos sin ijkk + (1 cos ) ij . (1.314)Direct use
of the characteristic equation can become unwieldy for larger
values of N . Fortunately, another trick is available if A is a
non-defective
square matrix, and if the power series (1.311) for f(x)
converges. For then
A is related to its diagonal form A(d) by a similarity
transformation (1.297),
and we may define f(A) as
f(A) = Sf(A(d))S1 (1.315)
in which f(A(d)) is the diagonal matrix with entries f(a`)
f(A(d)) =
f(a1) 0 0 . . .
0 f(a2) 0 . . ....
......
...
0 0 . . . f(aN )
(1.316)the a`s being the eigenvalues of the matrix A.
This definition makes sense because wed expect f(A) to be
f(A) =n=0
cnAn =
n=0
cn
(SA(d)S1
)n. (1.317)
But since S1S = I, we have(SA(d)S1
)n= S
(A(d)
)nS1 and so
f(A) = S
[ n=0
cn
(A(d)
)n]S1 = Sf(A(d))S1 (1.318)
which is (1.315).
Example: In quantum mechanics, the time-evolution operator is
taken
to be the exponential exp(iHt/~) in which H = H is a hermitian
linearoperator, the hamiltonian, named after William Rowan Hamilton
(1805
1865), and ~ = h/(2pi) 1034 Js where h is the constant named
after MaxPlanck (18581947). As well see in the next section,
hermitian operators
-
1.29 Functions of Matrices 49
are never defective, so H can be diagonalized by a similarity
transformation
H = SH(d)S1. (1.319)
The diagonal elements of the diagonal matrix H(d) are the
energies E` of
the states of the system described by the hamiltonian H. The
time-evolution
operator U(t) then is
U(t) = S exp(iH(d)t/~)S1. (1.320)
If the system has three states with angular frequencies i =
Ei/~, then U(t)is
U(t) = S
ei1t 0 00 ei2t0 0 ei3t
S1 (1.321)in which the angular frequencies are ` = E`/~.Example:
For a system described by the density operator , the entropy
S is defined as the trace
S = kTr ( ln ) (1.322)
in which k = 1.38 1023 J/K is the constant named after Ludwig
Boltz-mann (18441906). The density operator is hermitian,
non-negative, and
of unit trace. Since is hermitian, the matrix that represents it
is never
defective, and so that matrix can be diagonalized by a
similarity transfor-
mation
= S (d) S1. (1.323)
Thus since the trace is cyclic (1.27), we may compute the
entropy as
S = kTr(S (d) S1 S ln((d))S1
)= kTr
((d) ln((d))
). (1.324)
A vanishing eigenvalue (d)k = 0 contributes nothing to this
trace since
limx0 x lnx = 0. If the system has three states, populated with
proba-bilities i, the elements of
(d), then the entropy is
S = k (1 ln 1 + 2 ln 2 + 3 ln 3)= k [1 ln (1/1) + 2 ln (1/2) + 3
ln (1/3)] . (1.325)
-
50 Linear Algebra
1.30 Hermitian Matrices
Hermitian matrices have especially nice properties. By
definition (1.33),
a hermitian matrix A is square and unchanged by hermitian
conjugation
A = A. Since it is square, the results of section 1.27 ensure
that an N Nhermitian matrix A has N eigenvectors |n with
eigenvalues an
A|n = an|n. (1.326)
In fact, these eigenvalues are all real. To see why, we form the
adjoint of
equation (1.326)
n|A = ann| (1.327)and use the property A = A to find
n|A = n|A = ann|. (1.328)We now form the inner product of both
sides of this equation with the ket
|n and use the eigenvalue equation (1.326) to getn|A|n = ann|n =
ann|n (1.329)
which tells us that the eigenvalues are real
an = an. (1.330)
Since A = A, the matrix elements of A between two of its
eigenvectorssatisfy
amm|n = (amn|m) = n|A|m = m|A|n = m|A|n = anm|n(1.331)
which implies that
(am an) m|n = 0. (1.332)But since the all the eigenvalues of the
hermitian matrix A are real, we have
(am an) m|n = 0. (1.333)This equation tells us that when the
eigenvalues are different, then the eigen-
vectors are orthogonal. In the absence of a symmetry, all n
eigenvalues usu-
ally are different, and so the eigenvectors usually are mutually
orthogonal.
When two or more eigenvectors |n of a hermitian matrix have the
sameeigenvalue an, their eigenvalues are said to be degenerate. In
this case, any
-
1.30 Hermitian Matrices 51
linear combination of the degenerate eigenvectors will also be
an eigenvector
with the same eigenvalue an
A
(D
c|n)
= an
(D
c|n)
(1.334)
where D is the set of labels of the eigenvectors with the same
eigenvalue.
If the degenerate eigenvectors |n are linearly independent, then
we mayuse the Gramm-Schmidt procedure (1.1101.122) to choose the
coefficients
c so as to construct degenerate eigenvectors that are normalized
and or-
thogonal to each other and to the non-degenerate eigenvectors.
We then
may normalize these mutually orthogonal eigenvectors.
But two related questions arise: Are the degenerate eigenvectors
|nlinearly independent? And if so, what orthonormal linear
combinations of
them should we choose for a given physical problem? Lets
consider the
second question first.
We saw in Sec. 1.22 that unitary transformations preserve the
orthonor-
mality of a basis. Any unitary transformation that commutes with
the
matrix A
[A,U ] = 0 (1.335)
maps each set of orthonormal degenerate eigenvectors of A into
another
set of orthonormal degenerate eigenvectors of A with the same
eigenvalue
because
AU |n = UA|n = an U |n. (1.336)So theres a huge spectrum of
choices for the orthonormal degenerate eigen-
vectors of A with the same eigenvalue. What is the right set for
a given
physical problem?
A sensible way to proceed is to add to the matrix A a second
hermitian
matrix B multiplied by a tiny, real scale factor
A() = A+ B. (1.337)
The matrix B must completely break whatever symmetry led to the
degen-
eracy in the eigenvalues of A. Ideally, the matrix B should be
one that
represents a modification of A that is physically plausible and
relevant to
the problem at hand. The hermitian matrix A() then will have N
different
eigenvalues an() and N orthonormal non-degenerate
eigenvectors
A()|n, = an ()|n, . (1.338)
-
52 Linear Algebra
These eigenvectors |n of A() are orthogonal to each othern, |n =
, (1.339)
and to the eigenvectors of A() with other eigenvalues, and they
remain so
as we take the limit
|n = lim0|n, . (1.340)
We may choose them as the orthogonal degenerate eigenvectors of
A. Since
one always may find a crooked hermitian matrixB that breaks any
particular
symmetry, it follows that every N N hermitian matrix A possesses
Northonormal eigenvectors, which are complete in the vector space
in which
A acts. (Any N linearly independent vectors span their N
-dimensional
vector space, as explained in section 1.9.)
Now lets return to the first question and show that an N N
hermitianmatrix has N orthogonal eigenvectors. To do this, well
first show that the
space of vectors orthogonal to an eigenvector |n of a hermitian
operator AA|n = |n (1.341)
is invariant under the action of A. We must show that if |y is
any vectororthogonal to the eigenvector |n
n|y = 0 (1.342)then A|y also is orthogonal to |n, that is, n|A|y
= 0. We use successivelythe definition of A, the hermiticity of A,
the eigenvector equation (1.341),the definition of the inner
product, and the reality of the eigenvalues of a
hermitian matrix:
n|A|y = An|y = An|y = n|y = n|y = n|y = 0. (1.343)Thus the space
of vectors orthogonal to an eigenvector of a hermitian oper-
ator is invariant under it.
Now a hermitian operator A acting on an N -dimensional vector
space S
is represented by an N N hermitian matrix, and so it has at
least oneeigenvector |1. The subspace of S consisting of all
vectors orthogonal to|1 is an (N 1)-dimensional vector space SN1
that is invariant under theaction of A. On this space SN1, the
operator A is represented by an (N 1)(N1) hermitian matrix AN1.
This matrix has at least one eigenvector|2. The subspace of SN1
consisting of all vectors orthogonal to |2 is an(N 2)-dimensional
vector space SN2 that is invariant under the action ofA. On SN2,
the operator A is represented by an (N2)(N2) hermitianmatrix AN2
which has at least one eigenvector |3. By construction, the
-
1.30 Hermitian Matrices 53
vectors |1, |2, and |3 are mutually orthogonal. Continuing in
this way, wesee that A has N orthogonal eigenvectors |k for k = 1,
2, . . . , N .
The N orthogonal eigenvectors |k of an N N matrix A can be
normal-ized and used to write the N N identity operator I as
I =
Nk=1
|kk|. (1.344)
On multiplying from the left by the matrix A, we find
A = AI = ANk=1
|kk| =Nk=1
ak|kk| (1.345)
which is the diagonal form of the hermitian matrix A. This
expansion of A as
a sum over outer products of its eigenstates multiplied by their
eigenvalues
is important in quantum mechanics. The expansion represents the
possible
selective, non-destructive measurements of the physical quantity
represented
by the matrix A.
The hermitian matrix A is diagonal in the basis provided by its
eigenstates
|kAkj = k|A|j = akkj . (1.346)
But in any other basis |`, o, the matrix A appears as
Ai` = i, o|A|`, o =Nk=1
i, o|kakk|`, o. (1.347)
The linear operator
U =Nk=1
|kk, o| (1.348)
is unitary because it maps the arbitrary orthonormal basis |k, o
into theorthonormal basis of eigenstates |k. In the |k, o basis, U
is the matrixwhose nth column is the N -tuple i, o|n that
represents |n in the basis|i, o
Uin = i, o|U |n, o = i, o|n. (1.349)So equation (1.347) tells us
that an arbitrary N N hermitian matrix Acan be diagonalized by a
unitary transformation
A = UA(d)U . (1.350)
Here A(d) is the diagonal matrix A(d)nm = amnm.
-
54 Linear Algebra
A matrix that is real and symmetric is hermitian; so is one that
is
imaginary and antisymmetric.
A real, symmetric matrix R can be diagonalized by an orthogonal
trans-
formation
R = OR(d)OT (1.351)
in which the matrix O is a real unitary matrix, that is, an
orthogonal matrix
(1.258).
Example: Suppose we wish to find the eigenvalues of the real,
symmetric
mass matrix
M =(
0 m
m M
)(1.352)
in which m is an ordinary mass and M is a huge mass. The
eigenvalues
of this hermitian mass matrix satisfy the equation
det (M I) = (M)m2 = 0 (1.353)with solutions
=1
2
(M
M2 + 4m2
). (1.354)
The larger mass + is approximately the huge mass M
+ M + m2
M(1.355)
and the smaller mass is very tiny
m2