Embed Size (px)
Citation preview

Compress-Forward Relaying for Interference Mitigation
by
Peter Russell Thompson
A thesis submitted in conformity with the requirementsfor the degree of Master of Applied Science
Graduate Department of Electrical and Computer EngineeringUniversity of Toronto
© Copyright 2019 by Peter Russell Thompson

Abstract
Compress-Forward Relaying for Interference Mitigation
Peter Russell Thompson
Master of Applied Science
Graduate Department of Electrical and Computer Engineering
University of Toronto
2019
Users in a cellular network may be adversely affected by interference induced by neighboring base-
stations. The deployment of cooperative relays to assist these users is considered in this thesis. Correla-
tion of the interference between the relay and user may be exploited by the relaying scheme to mitigate
the adverse effects of interference. The main contributions of this thesis are a theoretical analysis of
the problem and an implementation using software-defined radios (SDRs). The theoretical results jus-
tify the use of cooperative relays for interference mitigation within a cellular network. Implementation
considerations are studied for this particular network configuration, such as the benefit in exploitation
of the redundancy of the signal of the relay and destination with the presence of interference. The SDR
implementation results demonstrate the feasibility of such an approach for a three-node relay network
with a single source of interference.
ii

Acknowledgements
I would like to thank my supervisor, Prof. Wei Yu for his insights and support over the course of my
studies. I would also like to thank the members of the defense committee for their valuable feedback:
Prof. Ravi Adve, Prof. Frank Kschischang, and Prof. Raymond Kwong.
I would also like to acknowledge the University of Toronto and the Department of Electrical and
Computer Engineering for providing a stimulating learning environment.
My research was made possible by funding from the E.W.R. Steacie Memorial Fellowship Program
and an NSERC Research Tools and Instruments Grant.
Finally, I would like to thank my parents and family for their support during my studies.
iii

Contents
1 Introduction 1
1.1 Overview of cooperative relaying . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Thesis Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Link-Level Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.2 Hardware Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Background 6
2.1 Compress-Forward Relaying . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.1 Network Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.2 Codebook Construction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.3 Message Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.4 Relay Quantization and Forward . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.5 Destination Quantization Index Decoding . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.6 Destination Message Decoding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.7 Probability of Error Analysis and Rate Expression . . . . . . . . . . . . . . . . . . 9
2.1.8 MIMO Compress-Forward Relaying . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.9 Cross-Relay Interference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2 Amplify-Forward Relaying . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.1 Network Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.2 Codebook Construction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.3 Achievable Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 OFDM Principles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.4 Frequency and Timing Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.5 Prototyping with Software Defined Radios . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3 Theoretical Results 21
3.1 General Cooperative Relaying Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Analysis of Compress-Forward . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.2.1 Gaussian Compress-Forward Rate with Wyner-Ziv Coding . . . . . . . . . . . . . . 23
3.2.2 SIMO Compress-Forward with Wyner-Ziv coding . . . . . . . . . . . . . . . . . . . 24
3.2.3 Gaussian Compress-Forward Rate without Wyner-Ziv Coding . . . . . . . . . . . . 25
3.2.4 Benefits of Wyner-Ziv Coding in a Gaussian Network . . . . . . . . . . . . . . . . 26
iv

3.3 Comparison of Amplify-Forward and Compress-Forward . . . . . . . . . . . . . . . . . . . 28
3.4 Closing the Gap between WZ-CF and AF . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.5 Network Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.6 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4 Synchronization 34
4.1 Synchronization for Amplify-Forward . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2 Synchronization for Compress-Forward . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5 Design of the Compress-Forward Relay Network 40
5.1 Transmitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.2 Relay Encoding and Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.3 Receiver Relay Decoding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.4 Receiver Source Decoding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.4.1 Spectral Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.4.2 Interference Cancellation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.4.3 Detection and Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.4.4 Equalization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.4.5 Channel Decoding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6 Experimental Results 54
6.1 Development Details . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.2 Testbed Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.3 Interference Analysis Experiment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.4 Local Oscillator Experiment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.5 Baseline Transmission Experiment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6.6 Cooperative Relaying with Interference Experiment . . . . . . . . . . . . . . . . . . . . . . 58
7 Summary and Conclusions 60
Appendices 62
A Achievable Rate for HCAF 63
Bibliography 67
v

Chapter 1
Introduction
Quality of service in a cellular network may vary among users depending on each user’s distance from its
connecting base-station. Users near the edge of a cell experience a lower signal-to-interference-plus-noise
ratio (SINR) on average than those closer to the center of the cell. This occurs for a few reasons. First,
the signal strength from the base-station is weakest for the users furthest from the base-station, at the
edge of the cell. Second, cell-edge users experience higher levels of interference from base-stations located
in adjacent cells. Multi-path propagation can also have a strong effect on quality of service for users
depending on the random nature of the RF environment, where some users may be severely affected by
a weak signal from the base-station and high levels of interference. The combined nature of these effects
can lead some to users having much lower levels of quality of service than the rest of the network.
One possible way of improving the quality of service for cell-edge users (or more generally users
experiencing high levels of interference) is to deploy wireless relays within the network (Figure 1.1).
Relays operate by processing a received signal which is then forwarded to the destination (the cell-edge
user in this case). The destination then decodes the message transmitted from the source (i.e. the
base-station) using its received signal from the base-station and the information forwarded to it by the
relay.
For a cell-edge user, assistance from a relay is most beneficial when the interference in the signal
received by the user is correlated with the interference in the signal received by the relay. In this case,
the signal from the relay and user can be coherently combined to mitigate the interference and boost
the base-station signal strength, potentially allowing for a much higher SINR than would otherwise be
attained without combining the two signals. It follows that strategic deployment of relays within the
cellular network has the potential to assist cell-edge users and other users experiencing high levels of
interference, leading to improved quality of service for the weakest users in the network.
Compared to other techniques for assisting cell-edge users (e.g., cooperation between adjacent base-
stations as in [1]), the use of relays has certain advantages. For instance, relays do not require any
backhaul access and could be deployed in an ad-hoc manner, operating independently from one another
and from the base-stations. Ad-hoc deployment of relays could lead to reduced network complexity
compared to alternative methods for assisting cell-edge users. Moreover, relays could be incorporated
into a network without significant changes to existing infrastructure.
This thesis will assess the practicality of cooperative relaying for assisting cell-edge users under the
presence of correlated interference. This is demonstrated using a link-level analysis of a cellular network
1

Chapter 1. Introduction 2
D
R
I
S
Figure 1.1: Schematic showing a relay (R) assisting a cell-edge user (denoted as destination D). Boththe relay and destination nodes pick up the signal transmitted by the source base-station (S), and asignal transmitted by an interfering base-station (I) which acts as correlated interference. The receivedsignal at the relay is processed and forwarded to the destination in an out-of-band relay-destination link.
with cooperative relays, and secondly, a hardware implementation of a cooperative relay network with
correlated interference to demonstrate the implementation feasibility of cooperative relays.
1.1 Overview of cooperative relaying
The information-theoretic capacity of a general relay network is still an open problem [2]; however,
there are a number of known strategies for bounding the achievable rate region of a relay network.
For the scenario studied in this thesis (that is, a user experiencing a weak signal and highly correlated
interference), an effective relaying strategy should exploit the correlated interference between the signals
at the relay and destination. Two existing relaying strategies that do so are compress-forward and
amplify-forward [3]. Both of these strategies involve having the relay send an approximation of its
received signal to the destination. The message is decoded at the destination using the forwarded signal
from the relay (which suffers some distortion) and the destination’s own received signal. This joint
decoding allows for the use of beamforming to null the correlated interference. These relaying strategies
stand in contrast to strategies which do not exploit the correlated interference such as decode-forward
for example, where the relay first attempts to decode the message first, then re-encodes and forwards
the message to the destination. The inability of decode-forward to exploit the correlated interference
may limit its viability in an interference-limited network.
There are several ways for the receiver to manage the interference between its own signal and the
signal forwarded by the relay. For example, successive interference cancellation [4] is one technique
available to the receiver for canceling inference. On the other hand, dirty paper coding [5] is a technique
that can be used at the transmitter to send information when the interference pattern is known to it (the
interference would likely need to be passed over backhaul). In this thesis, interference will be treated as
noise. Advantages of this approach are that it does not require passing additional information between

Chapter 1. Introduction 3
adjacent base-stations over backhaul, nor does it require any synchronization between the base-stations,
or any sort of advanced codebook construction. Treating interference as noise is perhaps the simplest
approach in practice, especially with an ad-hoc deployment of relays.
In this thesis it will be assumed that the connection between the relay and cell-edge user is made
using an out-of-band channel; that is, there is no interference between the signals transmitted by the
base-stations and the cooperative relays. This implies that the destination will receive two signals over
separate channels: one from the base-station, and one from the relay. This constraint has the benefit of
simplifying the implementation. Using separate channels avoids synchronization requirements between
the base-station and relay and also, in the case of compress-forward relay, avoids complex codebook
construction such as Markov block coding [3, Chapter 16.7] to mitigate interference between the relay
and base-station. Furthermore, if the relay link is made on a separate out-of-band channel, the link could
be established using a different wireless communication protocol than the one used by the base-station
(e.g., Bluetooth, depending on the relaying strategy, and the proximity of the relay to the destination).
It will also be assumed that this out-of-band channel will have finite capacity, and this will influence the
performance benefit of the relay. The band over which the transmitter sends its signal to the relay and
destination will be referred to as the primary band, and the out-of-band link will be referred to as the
secondary band.
With this layout in mind, one could envision different deployment strategies for the relays. For
example, the relays could be stationary, dedicated pieces of equipment. Alternatively, there could be a
cooperative network of users where individual users use their collective resources to assist one another
with some users acting as relays for other nearby users, as in [6], [7]. Regardless of how the relays are
deployed, one would need to consider a policy for managing the relays and the problem of association
between relays and users. A distributed algorithm for performing this association would probably be
most attractive in an ad-hoc relay network.
Other important decisions for the deployment of the relays within a network also need to be consid-
ered. For example, depending on the relaying strategy begin used, it may be possible for a single relay
to simultaneously assist multiple users by having the relay broadcast its message to all its associated
users. Depending on the relaying strategy, having the relay broadcast its message may affect the relay-
destination rate under multiple users. One could also consider multiple relays assisting a single user;
essentially forming a multiple-access channel between the set of relays and a single user.
1.2 Thesis Objectives
The two main objectives of the thesis will now be outlined in detail. As previously mentioned, the first
objective is a link-level analysis of a cellular network with cooperative relays, and the second objective
is a hardware implementation of a cooperative relay network experiencing correlated interference.
1.2.1 Link-Level Analysis
The goal of the link-level analysis is to examine the benefits and implementation challenges related to
the deployment of cooperative relays within a cellular network where users experience interference from
neighboring cells. This analysis involves a comparison between relaying strategies: namely compress-
forward and amplify-forward. In the case of compress-forward, there is a further analysis of the benefit

Chapter 1. Introduction 4
of Wyner-Ziv coding [8] (applied to the relay’s signal when the relay forwards its observation to the
destination).
The analysis includes implementation challenges related to the deployment of these relays, primarily
focusing on synchronization issues between the relay and destination. In addition, to analyze the benefit
of relaying, a cellular network with relays is modeled and compared against a number of baseline cases
without relays.
In the link-level analysis of wireless networks, one method for studying performance characteristics
is through stochastic geometry, which is covered in [9], [10] for example. In a typical network studied
using stochastic geometry, it is common to view the network as a collection of transmitter and receiver
nodes that are randomly distributed over the two dimensional plane. It is assumed that the transmitting
nodes may interfere with one another. The random distribution of nodes usually takes the form of a
Poisson point process due to its analytical tractability. When paired with a path-loss model (which
dictates signal loss as a function of distance between the transmission and receiver), and a random
channel fading model (such as Rayleigh fading), it becomes possible to analyze the distribution of the
SINR or data rate for the users within the network.
A variety of wireless networks involving cooperative relays have been studied using stochastic geom-
etry. In [11], a relay network model somewhat similar to the one being considered in this thesis was
studied. A cellular network was analyzed where the base-stations and cooperative relays are distributed
according to a Poisson point process, with users at a fixed distance from each base-station. Downlink
communication occurs via a decode-forward approach: the relay first decodes the message from the base-
station, and then forwards it to the destination. If the base-station-relay link SINR is below a certain
threshold, the relay becomes unable to decode the message so the destination and base-station fall back
to direct communication. The distribution of the SINR, mean achievable rate, and power efficiency are
studied as a function of the geometric density of nodes over the plane.
1.2.2 Hardware Implementation
The second objective of the thesis is to implement a cooperative relay network using software-defined
radios (SDRs). The SDR implementation involves the use of USRPs from Ettus Research [12], [13]
to implement a compress-forward relay network consisting of a transmitter, relay, receiver, and source
of interference (the source of interference is another SDR sharing the same frequency band as the
transmitter). The goal of the implementation is to demonstrate the practicality of a relaying scheme
where the destination is able to combine its received signal with the signal forwarded by the relay
to null the correlated interference. There are two main components to the implementation: the first
involves forwarding the relay signal to the destination via compress-forward, and the second involves the
single-input multiple-output interference cancellation at the destination when combining the signal from
the relay with the signal at the destination in recovery of the transmitted signal. The implementation
should be able to validate the assumptions used in the link-level analysis while also unveiling the nature of
certain challenges that are encountered in practice that may be overlooked in a more theoretical analysis.
These challenges include managing timing and frequency synchronization between the transmitter, relay,
and destination, distributed source coding for forwarding the compressed signal from the relay to the
destination, and accurate channel state estimation in the presence of interference, including estimation
of the interference statistics.
There have been a number of related software-defined radio projects undertaken recently that can be

Chapter 1. Introduction 5
used as a source of reference for this implementation. In [14], an amplify-forward relay network is imple-
mented using a SDR testbed using a distributed Alamouti block code. The implementation successfully
demonstrates the practicality of such a scheme, with an emphasis on overcoming synchronization issues
between the transmitter and relay. An interesting aspect of the amplify-forward scheme being used in
this implementation is that the local oscillator impairments at the relay (which typically lead to a car-
rier frequency offset that needs to be corrected at the destination), is canceled between receiving of the
signal at the relay, and re-transmission to the destination. This simplifies the implementation because
only the carrier frequency offset between the transmitter and destination needs to be corrected. The
analysis of CFO impairment in an amplify-forward relay network has also been studied in [15]. The
main differences between this scheme and the one considered in this thesis is that in this thesis the relay
strategy is implemented in the presence of correlated interference, a compress-forward scheme is used
(rather than amplify-forward), and the relay and source transmit over separate frequency bands.
In [16] cooperative relays were considered for improving performance in cognitive radio networks, and
included an SDR implementation. Cognitive radio involves dynamic allocation of the wireless spectrum
by sensing with wireless receivers. In this context, the relay is used as a method to combat signal fading
due to multipath propagation. The SDR implementation focused on the problem relay selection and
spectrum allocation by considering a new MAC protocol, which was implemented in the wireless testbed.
1.3 Thesis Outline
Chapter 2 covers the relevant background material, including a literature review, used throughout the
thesis. Chapter 3 analyzes the benefit from cooperative relaying. This including a theoretical overview
of different relaying schemes in the presence of interference, including a new relaying scheme that com-
bines amplify-forward and compress-forward. This chapter also provides link-level analysis of a cellular
network with relays deployed to assist cell-edge users. Chapter 4 describes implementation challenges for
cooperative relaying, primarily with regards to the problem of relay synchronization. Implementation
details of the compress-forward relaying strategy using SDRs are given in Chapter 5. Chapter 6 demon-
strates the performance of the SDR implementation. Concluding remarks are presented in Chapter 7.

Chapter 2
Background
This chapter begins with a theoretical overview of the two relaying strategies studied in this thesis:
compress-forward in Section 2.1, and amplify-forward in Section 2.2. These sections detail the operation
of these relaying strategies, and provide a derivation of their respective rate expressions. The remainder
of the chapter covers background required for the hardware implementation: Principles of Orthogonal
frequency-division multiplexing (OFDM) are covered in Section 2.3, and synchronization techniques are
covered in Section 2.4. These two sections are presented in the context of point-to-point communication,
but the principles are later applied to a relay network in subsequent chapters. Finally, an outline for
prototyping with software-defined radios and hardware details is presented in Section 2.5. This section
also describes the hardware and software packages used in the SDR implementation.
2.1 Compress-Forward Relaying
In this section, an information theoretic description of compress-forward relaying is presented. The
description is based on the one provided in [3] but is simplified on account of the orthogonal out-of-band
relay-destination link, as previously described in Section 1.1.
The basic principle of compress-forward is that the relay sends a quantized version of its received
signal to the destination, then the destination uses this quantized signal along with its own received
signal to recover the message from the source.
The quantization process involves taking the sequence of samples that make up the received signal
at the relay and choosing an approximation quantization sequence to send to the receiver. The set of
all quantization sequences, which makes up the quantization codebook, is finite and its size controls the
distortion of the quantized representation as well as the rate requirement for recovery of the quantization
index. A larger codebook reduces distortion at the cost of a higher rate requirement.
Distributed source coding (DSC) can optionally be applied to the quantization index to lower the rate
requirements of the relay-destination link, allowing for the support of a larger quantization codebook,
and therefore lower distortion in the forwarded signal. DSC relies on the correlation between the received
signal at the destination and the received signal at the relay during recovery of the quantization index
at the destination. To perform DSC, the quantization codebook is partitioned into equal sized bins.
This partitioning is revealed to the relay and destination during codebook design. Then, rather than
sending the index directly to the destination, the relay instead sends the bin index belonging to the
6

Chapter 2. Background 7
chosen quantization index. The destination then uses its received signal and the bin index to recover
the quantization index by finding the codeword jointly typical with its received signal within the bin.
This may be implemented in practice using the scheme outlined in [17]. It would be noted that the
implementation of DSC would require feedback of channel-state information (CSI) from the destination
to the relay so that the relay can choose the appropriate bin size to allow for successful decoding at the
destination.
An example of a practical implementation of DSC is called Distributed Source Coding Using Syn-
dromes (DISCUS) [17]. The first step in DISCUS is to map the signal onto a quantization sequence.
In the original formulation this was achieved with trellis coded quantization (see [18]). The rate of this
trellis code dictates the quantization noise. Next, instead of storing the quantization codeword directly,
a syndrome of the codeword is stored instead (the syndrome is the bin index using the previous termi-
nology). The syndromes are calculated so that all the codewords associated with a given syndrome form
another trellis code. This permits simple recovery of the codeword during decoding. The rate of this
inner trellis code dictate the rate of the coding scheme. To recover the codeword during decoding, trellis
coded demodulation is used by treating the decoder side-information as the signal and the codewords
associated with the given syndrome as the codebook. Note that all of DISCUS can be implemented with
two trellis decode operations: one at the encoder to calculate the syndrome, and a second at the decoder
to recover the codeword. Syndrome-based coding using LDPC codes was presented in [19].
On the other hand, if DSC is not used at the destination, then the quantization index is sent directly
to the destination.
After the quantization index is recovered at the destination, the message from the source can be
recovered using the received signal on the primary band and the quantized signal. This second state
of decoding takes place by finding the transmitted signal jointly typical with these two signals at the
destination.
It should be noted that there are a number of ways for the destination to perform the decoding of
the message. In this thesis, it is assumed that the decoding of the quantized signal is performed first,
then the source’s message is decoded, as outlined above. It is also possible to perform joint decoding
of the quantized signal and the source’s message using simultaneous non-unique decoding [3] (where
it is not counted as an error if the quantization index is incorrectly decoded; only the source message
matters). In [20], it was proven that joint decoding and successive decoding achieve the same set of
rates, despite the fact that joint decoding relaxes the distortion constraint. This result was generalized
to multiple compress-forward relays in [21]. From an implementation standpoint, successive decoding
may be easier to implement and also provides a useful decoupling of the dequantization stage and the
message decoding stage at the receiver. For these reasons, successive decoding is used in this thesis.
The main purpose for outlining the theoretical description of compress-forward in this thesis is to
guide the implementation. In practice, the random coding constructions used in this section are not
feasible from an implementation standpoint, but they can readily substituted for practical codebooks
during implementation. Other important considerations of the implementation are not outlined in the
theoretical overview, such as synchronization; but they are covered in subsequent chapters.
The rest of this section describes the compress-forward relaying strategy in more detail with the goal
of determining the achievable rate for compress-forward relaying.

Chapter 2. Background 8
Compress-Forward Relaying
SourceXn = C(m) Channel
p(yd, yr|x)Y nd
Y nr
Destinationl = D(Y n
d |Cr, k)m = D(Y n
d , Cr(l)|C)
Relayl = D(Y n
r |Cr)k = B(l)
Figure 2.1: Schematic of a compress-forward relay network, showing the source signal Xn, received signalat the relay Y nr , and received signal at the destination Y nd .
2.1.1 Network Model
The network consists of a source node, relay, and destination. There is a memoryless channel from the
source to the relay and destination that is characterized by a channel distribution p(yd, yr|x) where yr
and yd are the received samples at the relay (r) and destination (d), respectively, and x is the transmitted
sample at the source. It is also assumed that there is a fixed blocklength n for the source to transmit
its signal. The out-of-band relay-destination link allows for the passing of an index in the range 1 to
b2nCc over the blocklength from the relay to destination, where C is the capacity of the out-of-band
link. It should be noted that the relay-destination link is not a noisy channel (in practice, this model is
taken after the application of channel coding to the relay-destination link). This is done to simplify the
analysis. This network is illustrated in Figure 2.1.
2.1.2 Codebook Construction
To construct the source codebook, first fix a probability distribution function (p.d.f.) p(x) for the source,
and generate 2nR i.i.d. sequences using p(x), where R is the rate. These sequences form the source
codebook C.To construct the quantization codebook, fix a probability distribution p(yr). Next, generate 2nR
′
i.i.d. sequences of length n according to p(yr). R′ is the quantization rate. These sequences form the
relay codebook Cr. Partition these sequences into 2nR′′
bins. R′′ is the number of bins per sample. It is
assumed that R′′ ≤ R′. Let B(l) denote the bin index for the quantization index l.
2.1.3 Message Transmission
To transmit a message from the source, a message index m is selected between 1 and 2nR. The sequence
of length n from the codebook C corresponding to the index m is transmitted over the channel for that
block. This sequence is denoted as C(m).
2.1.4 Relay Quantization and Forward
The relay receives a length n sequence Y nr . To quantize the sequence, the relay first finds a sequence in
Cr that is jointly typical with Y nr . Let l = D(Y nr |Cr) denote the index of the quantized sequence.
We consider two cases of analysis: forwarding with DSC, and without. With DSC, the relay sends
the bin index of the quantization index over the out-of-band channel (denoted B(l)). Without DSC, the
relay sends the quantization index l directly over the out-of-band channel.

Chapter 2. Background 9
In the case of Wyner-Ziv coding, the constraint R′′ ≤ C must hold to ensure transmission of the bin
index over the channel. Without Wyner-Ziv coding, R′ ≤ C must hold to ensure transmission of the
quantization index.
2.1.5 Destination Quantization Index Decoding
The destination first decodes the quantization index sent from the relay. When DSC is not used, this is
trivial because the index was sent directly. When DSC is being used, then the destination must recover
the quantization index l from the bin index B(l) and received sequence Yd. To do so, the destination finds
a quantization sequence Yr within the bin such that Yr and Yd are jointly typical. Let l = D(Yd|Cr, k)
denote the decoded quantization index with DSC, and let l = k without DSC. The decoded quantized
sequence is therefore given by Cr(l).
2.1.6 Destination Message Decoding
Finally, the destination decodes the transmitted message from the source. To do so, the destination
performs joint typicality decoding between the received sequence, and the quantized sequence from the
relay to recover the message m = D(Y nd , Cr(l)|C).
2.1.7 Probability of Error Analysis and Rate Expression
We will now consider the probability of error during the decoding process in order to determine which
rates are supportable under compress-forward relaying. One can identify the following events as possible
sources of decoding error:
E1 There does not exist a sequence in Cr jointly typical with Yr
E2 Cr(l,B(l)) is not jointly typical with Yd
E3 Cr(l′,B(l)) is jointly typical with Yd, where l′ 6= l
E4 C(m) is not jointly typical with (Cr(l), Yd)E5 C(m′) is jointly typical with (Cr(l), Yd), where m′ 6= m
In summary, E1 is the error event where the decoder is unable to select an appropriate quantization
sequence; E2 and E3 are the error events than can occur when decoding the quantization index from the
bin index at the receiver; and E4 and E5 are the error events than can occur when decoding the message
index. Of course, E2 and E3 are only relevant when Wyner-Ziv coding is being applied, otherwise these
events do not apply.
The outline of for the rest of the analysis for the network can be found in [3, Chapter 16.7]. Based
on those results, we can conclude that the rate R is achievable under compress-forward if
R < I(X; Yr, Yd) (2.1)
subject to
C > I(Yr;Yr|Yd) (2.2)
with Wyner-Ziv coding or
C > I(Yr;Yr) (2.3)

Chapter 2. Background 10
without Wyner-Ziv coding.
This theoretical model of CF will be used as a basis for the implementation.
2.1.8 MIMO Compress-Forward Relaying
Up to this point, the compress-forward strategy has only been considered in the case of a single-input
single-output relay channel with single antennas at the source, relay, and destination. One may also
consider the case where there are multiple antennas either at the transmitter, relay, or destination.
In the case of multiple antennas at the transmitter, the analysis is complicated in the Gaussian case
by the fact that the achievable rate may be influenced by power control at the transmitter, which is
typically subjected to an average power constraint across all antennas, which leads to the optimization
of the transmit power covariance matrix. In the case of multiple receive antennas at the relay, one must
consider optimization of the quantization covariance matrix. When there are both multiple transmit
antennas and multiple relay antennas, these optimizations must be performed jointly. Such a network,
which also considered correlated interference at the relay and destination was investigated in [22] where
a coordinate ascent approach was used for joint optimization of the transmit covariance matrix and the
quantization noise covariance matrix.
One may also consider the use of compress-forward in the context of an OFDM network. In this
case, there are a fixed number of orthogonal OFDM subcarriers, and the relay may provide different
compression rates across each subcarrier. The transmitter may also adjust the amount of total power
allocated to each subcarrier. This problem can be expressed mathematically equivalently as the MIMO
case previously mentioned; however, in this case there is a further assumption of orthogonality between
each dimension.
2.1.9 Cross-Relay Interference
In the case of an ad-hoc relay network, there may be multiple relays operating simultaneously, assisting
different users. Unless mitigated through time-sharing, this may lead to interference between relays over
the out-of-band link. Because the messages sent from the relays under compress-forward is inherently
digital in nature, this may mean that the presence of other relays may decrease the capacity of the out-
of-band links due to inter-relay interference. Under amplify-forward relaying, the presence of multiple
relays is different because the relays may superimpose their transmitted signals. This will be considered
in more detail in subsequent chapters.
2.2 Amplify-Forward Relaying
Amplify-forward relaying is similar to compress-forward in the sense that both strategies involve having
the relay forward its received signal to the destination rather than relying on any relay decoding. The
difference between the two strategies is that compress-forward involves quantization and source coding
of the received signal at the relay, whereas an amplify-forward relay simply maps the received signal to
the output channel, and does not involve any sort of source or channel coding at the relay.
Amplify-forward will the considered in the link-level analysis of relaying presented in Chapter 3.
The hardware implementation only focuses on compress-forward, however, existing SDR cooperative
relay implementations using amplify-forward provide some important insight even when considering a

Chapter 2. Background 11
compress-forward implementation, mainly with regards to the issue of synchronization as will be discusses
later.
The rest of this section will show the rates achievable under amplify-forward.
2.2.1 Network Model
We consider a similar relaying setup as the compress-forward strategy outlined in Section 2.1. Specifically,
the network consists of three nodes: a source, relay, and destination. The source sends a signal over
the channel, and the relay and destination both acquire received signals. There exists an out-of-band
relay-destination channel which allows the relay to transmit the amplified signal to the destination. The
destination uses both the signal over the primary channel and the signal on the out-of-band channel to
decode the message sent from the source.
2.2.2 Codebook Construction
Fix the p.d.f. p(x) and generate 2nR i.i.d. sequences of length n according to p(x). These sequences form
the source codebook C.To send a message, the transmitter selects an index between 1 and 2nR and modulates that signal over
the duration of the blocklength n. The relay and destination receive signals each of length n according
to the discrete memoryless channel with p.d.f. p(yd, yr|x).
Next the relay maps its received signal to the out-of-band link via an amplification function f(·) which
is applied to each sample in the received sequence at the relay, that is, xnrd = (f(yr(1)), . . . , f(yr(n))).
Generally, the choice of f will be restricted by a power constraint.
The amplified signal is passed to the receiver according to another discrete memoryless channel with
p.d.f. p(yrd|xr). This out-of-band channel is independent from the primary channel. Any correlated
interference takes place within the received signals at the source and relay over the primary channel
according to p(yd, yr|x). It should be noted that in a real network, the channel may have a filtering
effect. This can be mitigated by using OFDM and considering only a single sub-carrier, so that the
channel becomes effectively memoryless.
The destination decodes for the transmitted message using the signal from the source transmitter
and the relay.
2.2.3 Achievable Rate
Due to the fixed operation of the relay, the relationship between the transmitter’s signal and the received
signal at the destination can be interpreted as a single-input two-output memoryless channel between
the source and destination with the p.d.f.
p(yd, yrd|x) =
∫p(yd, yr|x)p(yrd|f(yr)) dyr. (2.4)
Based on this observation, one can conclude that a rate R is achievable if R < I(X;Yd, Yrd). The
comparison between CF and AF will be presented in Section 3.3.

Chapter 2. Background 12
OFDM Transmission
S→P IFFT
N∑
k=−N
ak,je2πikN t
CyclicPrefix
P→Sbn ak,j
s(t)
Figure 2.2: Realization of an OFDM transmitter illustrating the steps of mapping a stream of complex-valued symbols onto a time-domain OFDM signal. The serial-to-parallel block (S→P) allocates a streamof symbols bn onto OFDM symbols indexed by time and frequency. Each frame (symbols sharing thesame time index j) is processed by applying an IFFT and is then extended by appending a cyclic prefix.The parallel-to-serial block (P→ S) concatenates the frames into a signal ready for transmission.
2.3 OFDM Principles
An orthogonal frequency-division multiplexing (OFDM) signal is generated by applying a discrete Fourier
transform to a sequence of complex-valued symbols at baseband in fixed-sized frames. It is common to
copy a portion of the start of each frame onto the end of the frame to form a cyclic prefix. The cyclic
prefix is used to avoid inter-symbol interference (ISI) at the receiver due to dispersion in the received
signal induced by multi-path propagation. Let N denote the number of symbols per frame (equivalently,
the number of subcarriers), and let Tg ≥ 0 denote the length of the cyclic prefix. It follows that the
total length of a frame in the time domain is N + Tg samples.
Consider a packet consisting of M frames. Let ak,j be the jth complex-valued symbol on subcarrier
k for 0 ≤ k ≤ N and 0 ≤ j < M , where j is the discrete time index. The symbols ak,j are typically
drawn from a digital modulation scheme such as QAM. We can express the signal of the packet in the
time domain at baseband at time t as
s(t) =
N−1∑
k=0
ak,j(t)e2πikN t (2.5)
for 0 ≤ t < M(N + Tg) where j(t) = b tN+Tg
c maps the continuous time t onto a discrete OFDM time
index j using the floor operator denoted by b·c. Note that the signal t → ak,j(t) is the symbol being
transmitted on subcarrier k at time t. Each symbol is transmitted for a total duration of N + Tg time
units, due to the construction of j(t). The period of the signal t → e2πikN t is a multiple of N , therefore
the signal t→ ak,j(t)e2πikN t accounts for the cyclic prefix. The construction of this signal is illustrated in
Figure 2.2.
It should be noted that not all the symbols ak,j are necessarily used for carrying data. It is common
for the subcarrier at baseband to be zero because of DC signal leakage at the receiver. This phenomenon
is described in the context of USRP SDRs in [23]. Some subcarriers may be allocated for synchronization
and equalization purposes by carrying pilot signals, and the subcarriers at the edge may be used for
filter realization.
This signal then passes through an digital-to-analog converter, where it is then modulated to the
carrier frequency and transmitted at time t = 0.
The receiver will first need to detect the signal, then align the signal samples in accordance to the
OFDM frames being transmitted by estimating the timing offset. Timing synchronization is necessary to
ensure that sampling is taken at the right moment in time before application of an FFT (to inverse the

Chapter 2. Background 13
operation of the IFFT at the receiver). Errors in timing estimation may lead to inter-symbol interference
(ISI). Under OFDM, it is typical for each OFDM frame to be followed by a cyclic prefix. The primary
purpose of this cyclic prefix is to reduce ISI based on the length of the channel impulse response. The
cyclic prefix prevents ISI after the OFDM packet is convolved with the channel impulse response. Errors
in timing synchronization can also be mitigated by the cyclic prefix; therefore, OFDM tends to be less
sensitive to timing synchronization errors than single carrier transmission without a cyclic prefix.
Due to instrumentation errors in the local oscillators at the transmitter and receiver, there will likely
be a difference between the modulating frequency used at the transmitter and demodulating frequency
at receiver[24]. This difference, called the carrier frequency offset (CFO), results in a frequency offset
between the transmitted and received signals at baseband. CFO impairments can also be caused by
Doppler shifts when the transmitter is moving relative to the receiver, but this source is negligible when
both transmitter and receiver are stationary.
Uncorrected CFO causes a rotation of the symbol constellation. It also causes non-orthogonality
between adjacent subcarriers, leading to inter-carrier interference (ICI). For this reason, OFDM is sus-
ceptible to poor performance if CFO is not estimated very accurately and corrected for. In OFDM
systems, there is generally less tolerance for errors in CFO estimation than timing offset estimation
because there is no guard for mitigating errors in CFO estimation (unlike the cyclic prefix with timing
estimation).
After the CFO is estimated at the receiver, it can be corrected for by multiplying the received signal
by a complex-valued sine wave whose frequency matches the CFO.
To recover the transmitted symbols, the receiver applies an FFT to each frame. The point in time
in which the FFT is applied needs chosen appropriately in order to avoid ISI. Due to the cyclic prefix,
there is some tolerance in the timing synchronization and ISI will only occur when timing errors and the
channel dispersion is sufficiently large.
Let y(t) denote the demodulated signal, let ω denote the estimated CFO at the receiver, and let t0
denote the timing estimate at the receiver. The signal with the CFO and timing correction is
y(t) = y(t0 + t)e−iωt. (2.6)
The transmitted samples are then recovered via FFT as
ak,j = ck
N−1∑
n=0
y((N + Tg)j + n)e−2πikN n (2.7)
where ck is the complex equalization coefficient applied separately to each subcarrier.
The next section will cover the design of the pilot signal and synchronization scheme used for calcu-
lating the CFO estimate ω, timing offset t0, and initial channel equalization coefficients ck.
2.4 Frequency and Timing Synchronization
One of the main challenges in the implementation of the compress-forward relay setup is synchronization
between the source, relay, and destination. In this section, a synchronization strategy is outlined for
point-to-point communication between a source and destination, and without a relay. In later sections,
this strategy will be expanded upon to provide synchronization with a relay. It is assumed that each

Chapter 2. Background 14
packet being transmitted is prefixed with a pilot signal that is used for detection, synchronization, and
channel estimation. Moreover, it is assumed that OFDM signaling is being used. This section outlines
the design of the pilot signal and its processing at the receiver. The synchronization scheme described
here is taken from [25].
Synchronization would typically be the second step in decoding a message following detection of the
signal (and preceding initial channel estimation). There are two components to synchronization that
need to be addressed: timing synchronization and frequency synchronization.
We will now begin outlining the detection and synchronization strategy. The pilot signal is composed
of two OFDM frames so that we can denote the symbols in the frequency domain (pre-IFFT in the OFDM
chain) as ak,0 for the first frame and ak,1 for the second frame for subcarriers 0 < k ≤ N .
The first frame in the time domain is composed of two repeated copies of a signal of length N/2 for
a total length of N , plus the cyclic prefix. In other words
s(t+N/2) = s(t) (2.8)
for 0 ≤ t < N/2 +Tg. This is achieved by assigning non-zero values to all the even subcarriers, and zero
to the odd subcarriers. In other words, we may write a2k+1,0 = 0 and |a2k,0| = c for 0 ≤ k < N2 for
some c > 0. Assigning zero to the odd subcarriers is what ensures that (2.8) is satisfied. The non-zero
value c applied to the subcarriers is chosen to be constant to ensure equal estimation performance across
subcarriers. In practice, this means that the pilot signal may be constructed using phase-shift keying.
The second frame of the pilot symbol consists instead of zero values on the even frequencies, and
non-zero values on the odd frequencies: |a2k+1,1| = c and a2k,0 = 0 for 0 ≤ k < N2 .
The receiver exploits the repeated pattern in the time domain representation of the first frame for
detection and synchronization. Prior to detection, the receiver keeps track of the following detection
statistic:
M(t) =2∑N/2−1k=0 y(t+ k)
Ty(t+N/2 + k)
∑N−1k=0 |y(t+ k)|2
. (2.9)
This can be interpreted as a normalized complex-valued sample auto-correlation of the received signal
for lag N/2 taken over a total of N samples. The idea is that without the presence of the pilot signal, the
auto-correlation of y(t) at lag N/2 will be zero making M(t) small. When the pilot signal is transmitted,
the repeated structure of the first frame will cause the magnitude of M(t) to become large, allowing for
detection. The denominator in (2.9) acts as a gain control, allowing for a fixed detection threshold. A
detection event can be triggered when |M(t)| > γ where γ is a threshold which may be chosen based
on the receiver operating characteristic (ROC) curve of the detection statistic (see [25]). This detection
method works even in the presence of CFO, because CFO only affects the phase of the statistic M(t),
as will be shown shortly.
After detection, the timing estimate t0 is calculated by scanning |M(t)| through time. Because of the
cyclic prefix, |M(t)| will plateau, so picking the point where |M(t)| reaches a maximum is not suitable.
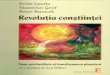
An example plot of the detection statistic |M(t)| highlighting the plateau is illustrated in Figure 2.3.
The following strategy is one way to produce an accurate timing estimate near the plateau’s midpoint.
Let t0 denote the time of the detection trigger. Let t∗ = arg maxk=0,...,N/2 |M(t0 + k)|. t∗ should lie
somewhere within the plateau. Next try to estimate the edges of the plateau to the left and right of t∗:
Let τ0 be the largest value such that τ0 ≤ t∗ and M(τ0) < 0.8|M(t∗)| and let τ1 be the smallest value

Chapter 2. Background 15
0 50 100 150 200 250 300
5
10
15
20
25
Time t in samples
DetectionStatistic
|M(t)|
OFDM Detection Statistic Example
Figure 2.3: OFDM detection statistic |M(t)| as a pilot signal is received. The time axis is in samples.The number of subcarriers N is 64 in this case and the cyclic prefix length is 16. The plateau at the peakof the spike has a duration of roughly 16 samples, the length of the cyclic prefix. The timing estimateshould be taken near the center of the plateau.
such that τ1 ≥ t∗ and M(τ1) < 0.8|M(t∗)|. τ0 should be close to the plateau’s edge on the left side of t∗
and τ1 should be close to the right side edge. Finally, timing estimate can then be taken as the center
of the edge estimates: t0 = 12 (τ0 + τ1), which should be close to the plateau’s midpoint.
After producing a timing estimate, the carrier frequency offset can be estimated. Suppose the received
signal is modeled as y(t) = eiωts(t) where ω is the CFO. To simplify this analysis, noise and the channel
impulse response is neglected from the channel model for now. Because of the repetition in the first
frame from (2.8), it follows that
y(t+N/2) = eiωN/2y(t) (2.10)
for 0 ≤ t < N/2 + Tg. In other words, the CFO in the pilot signal will cause a fixed phase shift
between samples N/2 apart in time. This phase shift will be present in the phase of M(t), allowing for
estimation of the CFO to within a modulo factor (this is the fine grained CFO). The integer part of the
CFO (course grained CFO) is calculated by examining the phase difference between the first and second
OFDM frames.
The CFO estimate can be expressed as
ω = 2πω + ω∗ (2.11)
where ω, the coarse CFO estimate, takes on an integer value and for the fine CFO estimate ω∗ ∈ [0, 2π].
The fine CFO estimate ω∗ is taken as ω∗ = 2N argM(t0). Both ω∗ and ω are estimated separately in
order to produce an estimate of the CFO via (2.11).
The coarse CFO estimate, on the other hand, is calculated by an exhaustive search over a range of
integer values by finding the best fit for the given transmitted sequence. Following [25], first correct the

Chapter 2. Background 16
time-domain sequence in accordance with the fine frequency offset:
y(t) = y(t+ t0)eiωt (2.12)
then translate it to the frequency domain via an FFT:
ak,j =
N−1∑
n=0
y((N + Tg)j + n)e2πikn/N (2.13)
across all subcarriers (k ∈ {0, . . . , N −1}), and for both pilot symbols (j ∈ {0, 1}). Then, one maximizes
the following expression ∣∣∣∣∣N−1∑
k=0
ak,0ak,1a∗k,0
ak,1
∣∣∣∣∣ (2.14)
over values of ω∗.
Finally, it is possible for initialization of the channel equalization coefficients for each subcarrier. The
coefficients for the even subcarriers can be taken from the first symbol, while the coefficients for the odd
subcarriers can be taken from the second.
A detailed analysis of the performance of this synchronization scheme can be found in [25].
2.5 Prototyping with Software Defined Radios
Recent technological advancements have made it now possible to rapidly prototype wireless communi-
cation technology on platforms known as software-defined radios (SDRs). SDRs allow for most of the
required digital signal processing and other logic to be implemented in software on a host computer.
The software passes and receives IQ samples at baseband to the SDR platform, where it is converted
to and from the carrier frequency, and passed through an antenna. Because most of the logic during
SDR prototyping is in software, development times for implementation new communication strategies
becomes relatively short. A schematic of a USRP SDR is given in Figure 2.4.
Let us consider the operation of a typical SDR implementation in more detail starting with an OFDM
transmitter. A general SDR transmitter software implementation will first involve the generation of a
message source represented as a byte stream. For testing purposes, this byte stream may be pseudo-
randomly generated. Next, a channel coding procedure is applied to the message. This may involve
mapping the data stream through a forward-error correcting code, or a CRC if the SNR is sufficiently high
and forward error correction is not required. The channel-encoded binary sequence is then mapped the
onto a sequence of complex-valued constellation points (this may be BPSK, QPSK etc.). The sequence
of complex-valued samples is vectorized over each OFDM subcarrier and then each vector passes through
an IFFT block. During vectorization, some of the subcarriers can be used for transmitting pilot signals,
or may be set to zero. After the IFFT, a cyclic prefix is then appended to each OFDM frame. The
sequence of OFDM frames are grouped into packets. A pilot signal and header information is appended
to each packet for detection, synchronization, estimation, transmitter identification under a MAC etc.
At this point, the complex-valued samples generated in software are sent to the SDR. This trans-
mission may take place over a USB, ethernet, or PCI-E connection between the host computer and the
SDR. On the SDR, the samples pass through a digital-to-analog converter, are modulated to the carrier
frequency and sent over the antenna.

Chapter 2. Background 17
Figure 2.4: Simplified schematic diagram for a USRP 2920. Image obtained from https://www.ettus.
com.
A SDR receiver implementation is similar: first an analog signal is picked up by the antennas on
the receiver SDR, they are demodulated down to band, pass through an analog-to-digital converter, and
transmitted over the connection medium to the host computer.
Modulation to the carrier frequency and back down to baseband using USRPs is prone to impairment,
which results in a carrier frequency offset.
On the host computer, the baseband IQ samples are used for detection of the transmitted signal. After
a signal is detected, frequency and timing synchronization is performed, followed by channel estimation.
An FFT is applied to the signal in blocks under OFDM to get the samples for each subcarrier. Channel
decoding is then performed to receive the transmitted message, based on the encoding strategy.
The outline above illustrates how most of the encoding and signal processing is performed in software.
This allows for fast prototyping and flexible implementations. Some SDRs are also equipped with a
programmable FPGA so some of the processing can take place on the SDR. The use of the FPGA may
be necessary when sending data at higher data rates where the host is unable to process the data fast
enough. On the other hand, writing FPGA software may make the design more complex, depending on
the software development package being used.
When this thesis project was undertaken, new SDRs were purchased for the research group as part
of a wireless test-bed. The test-bed consists of three laptops for use with three USB-powered SDRs
(these laptop/SDR pairs are intended to be fairly mobile, and can be displaced throughout a room, for
instance, with little effort), and five more powerful SDRs connected to a computing cluster via a local
ethernet connection (these can operate at a higher data rate and with more antennas in a MIMO setup,
compared to their USB-powered counterparts).
The three USB-powered USRPs are Ettus Research B-210s. They can operate in a 2 × 2 MIMO
configuration, with up to 56 MHz of bandwidth, or 61.44 mega-samples per second (MS/s).

Chapter 2. Background 18
Figure 2.5: Front of an Ettus Research USRP B210 in an enclosure. The four visible coaxial outputsare for connecting antennas. Image obtained from https://www.ettus.com.
In addition to the B-210s, there are two Ettus Research X-300s as well. The X-300 connects to the host
through a 10 GigE interface (it is also capable of connecting via PCIe or a 1 GigE connection); unlike the
B210, which is USB. This allows the interface to support higher data rates: up to 200× 106 samples/sec
per channel with two receive antennas. Unlike the B210, which is essentially an all-in-one device, the
X300 can be configured by choosing amongst different “daughterboards”, which control the transmit and
receive RF chains. Different daugherboards offer different MIMO capabilities, synchronization and phase
coherence options, and carrier frequency ranges. Each X-300 has two daughterboard slots. Moreover,
the X-300 has a customizable FPGA for high performance DSP. Multiple X-300s can be synchronized
together so they can operate essentially as a single multiple-antenna unit. Synchronization occurs with
respect to a clock source for aligning the discrete-time samples, as well as with respect to a reference
signal so the different USRPs use the same carrier frequency, making carrier frequency synchronization
easier. Synchronization between USRPs is possible with an Octoclock, which allow for up to 8-way
synchronization.
Finally Ettus Research N210s provide 1 × 1 MIMO configuration but can be connected together as
a single unit via the OctoClock.
There are a number of different software packages for SDR prototyping. In addition to being capable
of interfacing with the hardware, these packages contain typical communications/DSP functionality so
that one is not required to re-implement common from scratch. The most common toolchains that can
interface with the USRPs are LabVIEW Communications, MATLAB Simulink, and GNU Radio. After
experimentation with these different software options, I settled on using GNU Radio due to its extensive
software library of existing DSP algorithms, ability to implement custom functionality in either Python
or C++, and cost (i.e., free). On the other hand, the main disadvantage to GNU Radio was its lack
of integration with the USRPs’ user-programmable FPGA. If this functionality was desired for future
projects it would probably be worth investing in LabView Communications specifically for this purpose.
A screenshot of GNURadio is show in Figure 2.6. It shows an implementation of an OFDM trans-
mitter sending data to a USRP, implemented as outlined above.

Chapter2.
Background
19
Figure 2.6: Screenshot of GNURadio Companion: a graphical interface for GNURadio. Programming in GNURadio is done with blocks which beconnected with data streams. This screenshot shows an implementation of an OFDM transmitter generating random samples (via the Random Sourceblock near the top left), formatting them into OFDM packets, and sending baseband IQ samples to a USRP (this is the UHD: USRP Sink block atthe bottom)

Chapter 2. Background 20
2.6 Summary
This chapter provided a theoretical outline of CF and AF relaying which will be developed in Chapter 3
with a link-level analysis, and in Chapter 4 and Chapter 5 with an implementation of CF relaying.
Principles of OFDM and software-defined radios were also covered in this chapter, which are required
for the implementation as well.

Chapter 3
Theoretical Results
In this chapter, the performance benefit and implementation considerations of cooperative relaying in
a cellular network are studied. To begin, the achievable rates for a few cooperative relaying schemes
are outlined in a three node network consisting of a source, relay, and destination. It is assumed that
the noise in the received signals at the relay and destination is correlated, representing the interfer-
ing signals from adjacent base-stations in a cellular network. The achievable rate analysis focuses on
amplify-forward relaying, compress-forward relaying, and a hybrid scheme combining amplify-forward
and compress-forward. In the case of compress-forward, there is also a comparison between relaying
with Wyner-Ziv coding and without it. These results provide insight into the problem of relaying with
correlated interference, as well as a point of comparison between the relaying strategies. Implementation
considerations for the deployment of cooperative relays are also outlined for the different strategies,
primarily focusing on synchronization requirements between the nodes. Finally, a wireless network with
cooperative relays is simulated to provide more concrete quantitative differences between the strategies
in terms of the placement of users and relays relative to the base-station.
Previously in Section 2.1 and Section 2.2, the compress-forward and amplify-forward relaying strate-
gies were introduced. Section 3.1 and Section 3.2 builds upon these description by describing the two
strategies with correlated noise between the relay and destination under a Gaussian network model. The
results are interpreted and the strategies are compared in Section 3.3. Following these results, Section 3.4
shows how the amplify-forward relaying strategy can be adjusted to achieve the same achievable rates
as compress-forward with Wyner-Ziv coding. Based on these results, implementation insights are also
presented. Section 3.5 compares the relaying strategies under a simulated cellular network model.
3.1 General Cooperative Relaying Results
Some general results for a cooperative relay network are developed in this section that are used in
subsequent sections in this chapter. They can be applied to a relay network where the destination
receives a noisy version of the relay’s signal (as in compress-forward and amplify-forward) over an
orthogonal out-of-band channel. This analysis did not seem to appear in the literature, and differs from
existing approaches ([22], for example) by expressing the achievable rate regions in terms of mutual
information, rather than channel coefficients, which leads to expressions that are easier to interpret.
Based on results for a general relay network drawn in [3], the cut-set bound limits the capacity Cr
21

Chapter 3. Theoretical Results 22
of the relay network with an orthogonal out-of-band link as
Cr < maxp(x)
min{I(X;Yd) + C, I(X;Yd, Yr)} (3.1)
The first term I(X;Yd)+C minimizes the cut-set bound when the out-of-band capacity C is the limiting
factor. Specifically, C out-of-band bits cannot increase the total capacity by more than C bits. The
second term I(X;Yd, Yr) limits the capacity by the joint observations between relay and destination.
Recall that under amplify-forward, and compress-forward with and without Wyner-Ziv coding, the
destination receives a signal Yr from the relay over the out-of-band link, and (X,Yd)→ Yr → Yr forms
a Markov chain. The exact relationship between Yr and Yr depends on the relaying strategy (the noise
between Yr and Yr may be the out-of-band channel noise as in amplify-forward, or the quantization noise
as in compress-forward). In either case, the following rate constraint was developed for both relaying
strategies in Chapter 2: R < I(X;Yd, Yr). We note that
I(X;Yd, Yr) = I(X;Yd) + I(X; Yr|Yd) (3.2)
= I(X;Yd) + I(Yr, X; Yr|Yd)− I(Yr; Yr|Yd, X) (3.3)
= I(X;Yd) + I(Yr; Yr|Yd) + I(X; Yr|Yd, Yr)− I(Yr; Yr|Yd, X) (3.4)
= I(X;Yd) + I(Yr; Yr|Yd)− I(Yr; Yr|Yd, X) (3.5)
where (3.5) follows because I(X; Yr|Yd, Yr) = 0 as X → Yr → Yr forms a Markov chain. We can use this
result in the analysis of compress-forward and amplify-forward.
3.2 Analysis of Compress-Forward
This section presents a more in-depth analysis of compress-forward. This consists of derivation and
interpretation of rate expressions for the Gaussian relay network under compress-forward, and an analysis
of the benefit of Wyner-Ziv coding for quantization of the relay’s signal.
This analysis begin with simplifying the rate expressions under Wyner-Ziv coding (CF-WZ) with
single antennas at all nodes in Subsection 3.2.1. These results are generalized for the case of multiple
receiver antennas at the relay and destination (but still a single transmit antenna) in Subsection 3.2.2.
Next the results are provided for the SISO case without Wyner-Ziv coding (CF-WZ) in Subsection 3.2.3.
We will first outline the channel model used in the rest of this section. We will now consider the
compress-forward relay channel in the special case of Gaussian channels with an average power constraint
at the transmitter. This will be outlined for the more general case with multiple receive antennas at the
destination and relay, but a single transmit antenna. We can write
(Yd
Yr
)=
(hd
hr
)X +
(Nd
Nr
)
where hd ∈ Cnd×1, hr ∈ Cnr×1, with nd and nr being the number of antennas at the destination and
relay respectively. For the noise we have(Nd
Nr
)∼ CN (0(nd+nr)×1,Σ) where Σ ∈ C(nd+nr)×(nd+nr) is the
noise covariance between the destination and relay. Because it is assumed that there is interference of the
network, Nr and Nd consist of both the interference signal and the background noise. The interference

Chapter 3. Theoretical Results 23
component is what induces the correlation between Nr and Nd. For the transmit signal X ∼ CN (0, P ),
where P is the average transmission power.
For compression of the relay’s signal Yr onto Yr, it will be assumed there is additive quantization
noise so that Yr = Yr +Z where Z ∼ CN (0,Q), where Q is the quantization noise variance.
In this model, it is assumed there is perfect CSI at the destination. In particular, this implies that
the destination knows the degree of correlation between its own signal and the signal received at the
relay.
From the previous results in in Section 2.1, it follows that the rate R is achievable under compress-
forward if
R < I(X;Yd, Yr) = log2
1 +
[hTd h
Tr
](
Σ +
[0 0
0 Q
])−1 [hd
hr
] (3.6)
and
I(Yr; Yr|Yd) = log2
(1 + ΣYr|YdQ
−1) < C (3.7)
with Wyner-Ziv coding, or
I(Yr; Yr) = log2
(1 + Σ2
YrQ−1) < C (3.8)
without Wyner-Ziv coding. In the following subsections, these results are simplified.
3.2.1 Gaussian Compress-Forward Rate with Wyner-Ziv Coding
From (3.5) and (3.7) we have
R < I(X;Yd, Yr) = I(X;Yd) + I(Yr; Yr|Yd)− I(Yr; Yr|Yd, X) (3.9)
< I(X;Yd) + C − I(Yr; Yr|Yd, X) (3.10)
where the gap between (3.9) and (3.10) can be arbitrary small when the Wyner-Ziv constraint (3.7) is
closed. Under the Gaussian channel model, we can also write
I(Yr; Yr|Yd, X) = I(Nr;Nr + Z|Nd) (3.11)
= log2
(1 +
σ2Nr|NdQ
)(3.12)
= log2
(1 +
σ2Nr|Ndσ2Yr|Yd
(2C − 1)
)(3.13)
= log2
(1 +
2C − 1
2I(X;Yd,Yr)−I(X;Yd)
)(3.14)
(3.13) follows by substitution for Q from (3.7). Therefore, the rate under the Gaussian model with
optimization of the out-of-band constraint can be expressed as
R = I(X;Yd) + C − log2
(1 +
2C − 1
2I(X;Yd,Yr)−I(X;Yd)
)(3.15)
= I(X;Yd, Yr)− log2
(1 +
2I(X;Yd,Yr)−I(X;Yd) − 1
2C
)(3.16)

Chapter 3. Theoretical Results 24
where
I(X;Yd) = log2
(1 +|hd|2Pσ2d
)(3.17)
I(X;Yd, Yr) = log2
(1 + hTΣ−1hP
)(3.18)
The two equations (3.15) and (3.16) relate the rate under compress-forward to the cut-set bound in (3.1)
where the last term in each of the equations can be interpreted as a penalty from the cut-set bound.
If we let C = I(X;Yd, Yr) − I(X;Yd), which can easily be shown to be the point where the rate
bound (3.15) is farthest from the cut-set bound (3.1), then we have
R > I(X;Yd, Yr)− log2
(2− 1
2I(X;Yd,Yr)−I(X;Yd)
)(3.19)
> I(X;Yd, Yr)− 1 (3.20)
Therefore, we can conclude that compress-forward with Wyner-Ziv coding will always be within 1 bit of
the cut-set bound.
3.2.2 SIMO Compress-Forward with Wyner-Ziv coding
We will now consider the more general case of the the CF-WZ relaying scheme where there are multiple
antennas either at the relay or destination, but a single antenna at the transmitter. The reason for
studying this case is that the multiple antennas at the relay and destination can be used to mitigate the
correlated interference between them. Let nr ≥ 0 denote the number of relay antennas and let nd ≥ 0
denote the number of destination antennas. Note that
I(Yr; Yr|Yd, X) = log∣∣I + ΣYr|Yd,XQ
−1∣∣ (3.21)
I(Yr; Yr|Yd) = log∣∣I + ΣYr|YdQ
−1∣∣ (3.22)
Performing the spectral decomposition ΣYr|Yd = V ΛV T and substitutingQ−1 = V Λ−1/2Q−1Λ−1/2V T
(with Q being an auxiliary random matrix) gives
I(Yr; Yr|Yd, X) = log∣∣∣I + Λ−1/2V TΣYr|Yd,XV Λ−1/2Q−1
∣∣∣ (3.23)
I(Yr; Yr|Yd) = log∣∣∣I + Q−1
∣∣∣ (3.24)
Performing another spectral decomposition Λ−1/2V TΣYr|Yd,XV Λ−1/2 = V ΛV , substituting Q−1 =
V Q−1V , and assuming Q is diagonal with qi on the ith diagonal gives
I(Yr; Yr|Yd, X) =
nr∑
i=1
log(
1 + λiq−1i
)(3.25)
I(Yr; Yr|Yd) =
nr∑
i=1
log(1 + q−1i
)(3.26)
There is a further simplification because X is scalar. Suppose Z follows the conditional distribution of
Yr given Yd, then
ΣYr|Yd,X = ΣZ|X = ΣYr|Yd−ΣZXΣXZσ
−2X (3.27)

Chapter 3. Theoretical Results 25
and therefore
Λ−1/2V TΣYr|Yd,XV Λ−1/2 = Λ−1/2V T(ΣYr|Yd
−ΣZXΣXZσ2X
)V Λ−1/2 (3.28)
= I −Λ−1/2V TΣZXΣXZσ2XV Λ−1/2 (3.29)
The term ΣZXΣXZσ−2X has at most one non-zero eigenvalue because ΣZX is a vector. From (3.29),
this implies that λ1 =∣∣∣ΣYr|Yd,XΣ−1Yr|Yd
∣∣∣ = 2−I(X;Yr|Yd) and λ2 = · · · = λnr = 1 and from (3.5)
I(Yr; Yr, Yd) = I(X;Yd) + I(Yr; Yr|Yd)− I(Yr; Yr|Yd, X) (3.30)
= I(X;Yd) + log(1 + q−11
)− log
(1 + 2−I(X;Yr|Yd)q−11
)(3.31)
with the constraint being
C > I(Yr; Yr|Yd) =
nr∑
i=1
log(1 + q−1i
)(3.32)
Clearly this is maximized when q−12 = · · · = q−1nr = 0, leading to a similar expression as the SISO case
(3.16)
R < I(X;Yd) + C − log2
(1 +
2C − 1
2I(X;Yd,Yr)−I(X;Yd)
)(3.33)
It is worth mentioning that when nr > 1, an appropriate quantization matrix Q is essential. Because
there is only one transmit antenna, the relay should only quantize a one-dimensional subspace of Yd. By
(3.31), quantizing a component of Yd orthogonal to this one-dimensional subspace does not increase the
rate, but still uses the out-of-band link capacity. During the simulations presented below in Section 3.5,
it was confirmed that when choosing a uniform quantization matrix Q = qI, there is no benefit in
increasing the number of relay antennas. The rate only increases when Q is optimized.
3.2.3 Gaussian Compress-Forward Rate without Wyner-Ziv Coding
We will now examine the case of the compress-forward strategy without Wyner-Ziv coding under the
SISO Gaussian channel model. The rate expression (3.9) still holds without Wyner-Ziv coding by
following the same arguments outlined above. First note that
σ2Yr|Ydσ2Yr
= 2−I(Yd;Yr) (3.34)
We can then write
I(Yr; Yr|Yd) = log2
(1 +
σ2Yr|YdQ
)(3.35)
= log2
(1 +
σ2Yr|Ydσ2Yd
(2C − 1)
)(3.36)
= C − I(Yd;Yr) + log2
(1 +
2I(Yd;Yr) − 1
2C
)(3.37)

Chapter 3. Theoretical Results 26
where (3.36) follows from substitution of Q from (3.8). Also
I(Yr; Yr|Yd, X) = log2
(1 +
σ2nr|ndQ
)(3.38)
= log2
(1 +
σ2nr|ndσ2Yr
(2C − 1)
)(3.39)
= log2
(1 +
σ2Yr|Ydσ2Yd
2C − 1
2I(X;Yd,Yr)−I(X;Yd)
)(3.40)
= log2
(1 +
2C − 1
2I(X;Yd,Yr)−I(X;Yd)+I(Yd;Yr)
)(3.41)
These results can be combined together to express the rate
I(X;Yd, Yr) = I(X;Yd) + C − I(Yd;Yr) + log2
(1 +
2I(Yd;Yr) − 1
2C
)
− log2
(1 +
2C − 1
2I(X;Yd,Yr)−I(X;Yd)+I(Yd;Yr)
)(3.42)
As in the case of compress-forward with Wyner-Ziv coding demonstrated above, (3.42) can be interpreted
as expressing the cut-set bound plus three penalty terms. The first two penalty terms can be interpreted
as reducing the capacity C of the out-of-band link by roughly I(Yd;Yr) bits. This penalty is due to the
redundant transmission of correlated information between Yd and Yr when Wyner-Ziv coding is not used
for quantization of Yr. The third penalty term plays the same role as the penalty term in the Wyner-Ziv
case, causing the rate to saturate to I(X;Yd, Yr) as C → ∞ (this is because the term itself tends to
I(X;Yd, Yr)− (I(X;Yd) + C − I(Yd;Yr)), canceling out the other terms in the expression).
We can see that the gap between the rate and cut-set bound is maximized when C = I(X;Yd, Yr)−I(X;Yd). In this case, the rate can be bounded as
R > I(X;Yd, Yr)− log2
(1 + 2I(Yd;Yr)
)(3.43)
Therefore, we can conclude that compress-forward without Wyner-Ziv coding will always be within
log2
(1 + 2I(Yd;Yr)
)bits of the cut-set bound.
3.2.4 Benefits of Wyner-Ziv Coding in a Gaussian Network
Based on this analysis, we can consider a more detailed comparison of the benefit of Wyzer-Ziv coding on
the compress-forward relay network. We already concluded that omission of Wyner-Ziv coding leads to a
penalty in the capacity of the out-of-band link of roughly I(Yd;Yr) bits. Therefore, Wyner-Ziv compress-
forward is most beneficial when both I(Yd;Yr) and I(X;Yd, Yr)−I(X;Yd) (this being the maximum gain
in rate from relaying) are large. This would be true with a very strong source of interference with a single
antenna (i.e., making the interference lie within a one-dimensional subspace), leading to high correlated
noise, along with a weaker source signal and even weaker background noise. In this case, both I(X;Yd)
and I(X;Yr) would be small because of the high interference noise, but I(X;Yd, Yr) would be large
because the one-dimensional interference subspace could be canceled, allowing for a low SNR estimate
of X. On the other hand, the high interference would cause correlation between the two signals Yd and
Yr, making I(Yd;Yr) large. In this case, omitting Wyner-Ziv coding would severely reduce performance.

Chapter 3. Theoretical Results 27
0 1 2 3 4 5 6 7 8 9 101
2
3
4
5
6
7
Out-of-Band Capacity C (bits/symbol)
Rate
R(bits/symbol)
Achievable Rates under Compress-Forward Relaying
Cutset BoundCF-WZ
CF-WZ; I(Yd;Yr) = 1
CF-WZ; I(Yd;Yr) = 2
CF-WZ; I(Yd;Yr) = 3
Figure 3.1: Achievable rates are illustrated for the case with Wyner-Ziv coding (CF-WZ), and withoutWyner-Ziv coding (CF-WZ), as a function of the out-of-band capacity. Without Wyner-Ziv coding, theplot is further characterized by I(Yd;Yr) (i.e., the correlation between Yd and Yr). The colored dottedlines show time-sharing bounds between direct transmission (i.e., relay not active) and high-resolutioncompress-forward without Wyner-Ziv at C = 5 + I(Yd;Yr) and R = 5.
Intuitively, this is because the high correlation between Yd and Yr makes the forwarded signal Yr highly
redundant at the destination, so the out-of-band link becomes wasted. With Wyner-Ziv coding, the
redundant information is omitted by taking advantage of the correlation in Yr and Yd allowing for better
use of the out-of-band link.
On the other hand, we can also consider when Wyner-Ziv coding is least beneficial. If I(Yd;Yr) = 0,
or equivalently Yd and Yr are independent, then I(Yr; Yr|Yd) = I(Yr; Yr) and Wyner-Ziv coding will have
no benefit.
The rates achievable under compress-forward, with and without Wyner-Ziv coding, are illustrated in
Figure 3.1. The plot shows the rates achievable in various cases as a function of the out-of-band capacity
C. It assumes I(X;Yd) = 1 and I(X;Yd, Yr) = 6. These values characterize the achievable rates with
Wyner-Ziv coding, as well as the cut-set bound. When the cut-set bound saturates at C = 5 and R = 6,
the rate with Wyner-Ziv is 5.0203 bits, or just under 1 bit of the cut-set bound, as proven above. Thus,
5 out-of-band bits increase the rate by just over 4 bits. From the figure, it is clear that there are quite
large diminishing returns to pick up the last remaining bit in the rate, requiring roughly 5 additional
out-of-band bits.
Rates under compress-forward without Wyner-Ziv coding are also illustrated in Figure 3.1. The
rates are demonstrated for different values of I(Yd;Yr) as the solid colored lines. It is clear that the
rate is non-concave as a function of C. The reason for this is because of the I(Yd;Yr) penalty bits
imposed on the out-of-band link. Therefore, when the out-of-band capacity is low, there is not very
much valuable information being passed from the relay to destination, as most of the compressed signal

Chapter 3. Theoretical Results 28
is redundant. Due to the non-concavity of the rate, the rate can be improved by time-sharing between
direct transmission and compress-forward with a higher out-of-band capacity.
Figure 3.1 also illustrates the achievable rates under time sharing by the dotted lines. Time sharing
takes place between direct transmission (C = 0, R = I(X;Yd) = 1), and high-resolution compress-
forward without Wyner-Ziv coding (C = I(X;Yd, Yr) − I(X;Yd) + I(Yd;Yr) = 5 + I(Yd;Yr), R =
I(X;Yd, Yr) − 1 = 5). This time-sharing strategy is sub-optimal but gives a simple characterization of
the achievable rates under compress-forward. It shows that 1 bit is lost in the rate R, and I(Yd;Yr) bits
are lost in the out-of-band link capacity.
3.3 Comparison of Amplify-Forward and Compress-Forward
An important question related to this thesis is how the rates under amplify-forward compare to those
under compress-forward. The achievable rates under the two strategies were considered in Section 2.1 and
Section 2.2. In summary, under AF R < I(X;Yd, Yrd) subject to a power constraint in the amplification
function and under CF R < I(X;Yd, Yr) subject to a rate constraint on the out-of-band link. Under a
Gaussian network, we may presume that Xr =√P/σ2
yrYr where P is the transmit power at the relay.
We have Yrd = Xr + Nrd. Suppose the destination normalizes the received signal from the relay by a
factor of√σ2yr/P so that we can write Y ′rd =
√σ2yr/PYrd = Yr+N ′rd. Likewise, under compress-forward,
the distorted signal was modeled as Yr = Yr +Q. In summary, we have
Rate under AF: R < I(X;Yd, Yr +N ′rd) (3.44)
Rate under CF: R < I(X;Yd, Yr +Q) (3.45)
Moreover, the noise variances Nrd and Q depend only on the out-of-band link. It is worth ask-
ing how they relate to develop a quantitative comparison of the strategies. The differences in network
formulations presented in these Section 2.1 and Section 2.2 for the two schemes prevent a direct com-
parison between the two strategies; namely due to the differences in representation of the out-of-band
channel. Under compress-forward, it was assumed that nC bits could be reliably transmitted from
the relay to destination over each block, while the out-of-band link was treated as a noisy independent
identically-distributed (i.i.d.) channel under the amplify-forward formulation. The network formulations
are different to simplify the analysis of the two schemes separately. On the other hand, it is also pos-
sible to consider the conversion of the noisy amplify-forward channel to a reliable channel by assuming
I(Xr;Yrd) < C, which can allow for a direct comparison. It follows then, that under a Gaussian network
that
C > I(Xr;Yrd) = log2
(1 +
σ2Yr
σ2Nrd
)(3.46)
Comparing this to the compress-forward quantization constraint without Wyner-Ziv coding (3.8) re-
stated:
C > log2
(1 +
σ2Yr
Q
)(3.47)
It is clear that the constraint on the quantization noise Q under CF-WZ matches the constraint on the
relay channel noise σ2Nrd
under AF. In other words, the achievable rate region under AF is equal to the
achievable rate region under CF-WZ. This comparison is only valid under certain assumptions with

Chapter 3. Theoretical Results 29
regards to the out-of-band link. Specifically, CF and AF are only directly comparable when there is
one channel use on the out-of-band link per primary band channel use (i.e., the bandwidth used by the
primary band is equal to the out-of-band link).
With this insight, one could interpret CF-WZ as converting the channel noise in the out-of-band link
into quantization noise. It is only when Wyner-Ziv coding is utilized that compress-forward can produce
a positive gain over amplify-forward.
It is worth making another comparison between amplify-forward and compress forward as well. One
should recall that under amplify-forward, each channel use by the transmitter results in exactly one
channel use of the relay in the out-of-band link. This requirement places a bandwidth constraint on any
network that deploys amplify-forward; specifically, the bandwidth used by the primary transmitter must
be equal to the bandwidth used by the relay. In the case of compress-forward, any amount of bandwidth
can be allocated for the out-of-band link in order to obtain a suitable quantization noise level.
In the design of a MIMO amplify-forward scheme one would also have to take into consideration the
design of the relay amplification matrix, subject to a given power constraint; whose dimensions would
be determined by the number of receive antennas and the number of transmit antennas at the relay. In
contrast to compress-forward, the quantization covariance matrix used at the relay would be designed
independently from any transmit beamforming matrix used for forwarding the quantized data to the
destination. In this regard, MIMO optimization for amplify-forward is more complicated.
On the other hand, amplify-forward relaying possesses certain advantages over compress-forward
relaying: first, the relay does not require any channel state information from the destination for optimal
operation. The relay only needs an automatic gain controller (AGC) to compute the amplification gain
subject to the given power constraint. On the other hand, under compress-forward the relay needs to
pick the appropriate quantization noise level and number of bins (in the case of Wyner-Ziv coding) based
on channel state information passed from the destination. This is to ensure the destination is able to
decode the relay’s message.
Another advantage of amplify-forward is that it becomes much easier to broadcast the received signal
to multiple users. Unlike compress-forward, where the quantization noise needs to be picked based on
the weakest user, under amplify-forward there is no such requirement.
A final advantage of amplify-forward can be seen when multiple relays interfere with one another
in the out-of-band link. Under compress-forward, when there are multiple relays present, each user
associates itself with a single relay, and any other relays that are present at the same time act as a
source of interference in the out-of-band link, which reduces the capacity of the relay-destination link.
In the case of amplify-forward, there is no need for explicit relay-destination associate; instead, the
destination simply listens over the out-of-band channel. If there are multiple amplify-forward relays
that use the out-of-band channel at the same time, their transmitted signals simply superimpose onto
one another when received at the destination, rather than acting as noise between one another. The
practical validity of this assumption is considered in Chapter 4.
3.4 Closing the Gap between WZ-CF and AF
It was previously shown that AF can achieve the same rates as CF-WZ in a Gaussian network. This
section will outline a modified AF strategy that can achieve the same rates as CF-WZ in a Gaussian
relay network by exploiting the redundancy between Yr and Yd. The basic principle is to have the

Chapter 3. Theoretical Results 30
*U
*
*
*
Yr
E[Yr|Yd]
E[U |Yd, Yrd]
E[Yr|U, Yrd]
Xr
Figure 3.2: Quantization and estimation of the relay’s signal Yr. The red stars represent quantizationpoints, and their Voronoi cells are outlined.
relay quantize its received signal with a low-rate quantizer that captures the correlation between Yr
and Yd. The relay then amplifies the difference between the quantized signal and its received signal
Yr (i.e., it amplifies the quantization noise), which is independent of Yr and Yd. The destination first
recovers the quantized signal by exploiting the correlation between Yr and Yd, and then forms a high-SNR
approximation of Yr by adding the forwarded quantization noise to the quantized signal.
The procedure for quantization of the relay’s signal Yr and the reconstruction at the destination is
illustrated in Figure 3.2. The signal Yr is mapped onto a quantized representation U and the difference
between Yr and U (the quantization noise), is amplified and forwarded to the destination as the relay’s
transmitted signal Xr. Correlation between Yr and Yd allows the destination to construct an estimate
of Yr as E[Yr|Yd]. This estimate is re-conditioned according to Yrd, the received quantization noise, to
form E[U |Yd, Yrd] which is then used to recover U . Finally, after recovery of U the quantization noise is
added back to U to estimate Yr. Because this strategy involves both quantization and amplification, it
will be called hybrid-compress-amplify-forward (HCAF).
This scheme has been shown to match the achievable rate of CF-WZ. The proof is provided in
Appendix A.
3.5 Network Model
A cellular network with cooperative relays is simulated to analyze the benefit of cooperative relaying.
The cellular network consists of multiple base-stations, each interfering with one another. The base-
stations are distributed over the plane in a hexagonal grid. It is assumed that each base-station is
associated with one user, whose location is randomly located within the base-station’s cell. Cooperative
relays are also distributed in a hexagonal pattern along the cell edge. The distribution of base-stations

Chapter 3. Theoretical Results 31
Figure 3.3: Layout of base-stations and relays for a single cell. The blue dots represent the potentiallocations for the relays. A user is randomly placed in the hexagonal cell and associates with the closestrelay.
and relays is illustrated in Figure 3.3.
There are two parameters that control the relay distribution relative to the base-stations. The density
of the relays, d > 0, is the number of relays along the perimeter of the cell divided by 6 (the number of
cell edges). In Figure 3.3 the density is 10. The other parameter is the number of relay layers, 1 ≤ l ≤ d,
which in Figure 3.3 is 4. Increasing d reduces the minimum distance between a cell-edge user and the
closest relay, which in the case of compress-forward relaying improves the out-of-band link capacity. The
value of l characterizes the portion of randomly distributed users which benefit from the cooperative
relays. The number of relays per cell is 2d + 3(2d − l)(l − 1) and the portion of the cell’s area covered
by relays is roughly 1− (1− l/d)2.
There is a common channel-model between antennas of any two nodes in the network. These node
pairs may consist of a base-station and a relay or destination; or a relay and destination in the out-of-
band link. For a transmitter t and receiver r, the channel between t’s ith antenna and r’s jth antenna is
htirj = vtirj `(||xt−xr||), where vtirj ∼ CN (0, 1) is the Rayleigh fading factor, which are i.i.d. between all
antenna pairs, xt and xr are the locations of the transmitter and receiver, respectively, and `(d) = d−3
is a path-loss function.
It is assumed that there is one transmit antenna at each base-station, a single receive antenna at
each user for receiving signals from the base-stations and from relays over the out-of-band link. There
is a single transmit antenna at each relay, and nr > 0 receive antennas at each relay.
The bandwidth of the network is split into two subbands, each begin W Hz for a total of 2W Hz. In
this simulation W = 10 MHz. One band is allocated for the primary band, which is used for transmission
by the base-stations. How the second band is used depends on the scenario. The scenarios being
considered are as follows:
Baseline (BL) The relays are unused and the primary band uses W Hz of bandwidth.

Chapter 3. Theoretical Results 32
Increased Primary Band (IPB) The relays are unused and the primary band uses 2W Hz of band-
width by allocating the bandwidth that would otherwise be used for the relays to instead increase
the bandwidth on the primary band. This scenario essentially doubles each user’s rate from the
BL case.
Amplify-Forward (AF) The relay within the cell that is closest to the user amplifies its signal and
forwards it to the destination over the second band. The case with nr = 1 is only considered under
AF. Inter-cell relay interference causes the amplified signals from multiple relays to superimpose
when received at the destination.
Compress-Forward Uniform Quantization (CF-UQ) The relay within the cell that is closest to
the user compresses its signal and forwards it to the destination. The compressed signal is multi-
dimensional when nr > 1. The quantization noise covariance is sub-optimally taken as ΣQ = qI.
q is chosen so that the out-of-band capacity constraint is satisfied. During calculation of the out-
of-band relay-destination capacity, the interference from other relays in the network is treated as
noise.
Compress-Forward Optimal Quantization (CF-OQ) Same as CF-UQ, but the quantization noise
covariance ΣQ is optimized to maximize the rate of the user as in Section 3.2.2. As mentioned
earlier, an implementation of this strategy would require CSI at the destination.
Antenna Pooling Upper Bound (AP) An upper bound for the compress-forward schemes. The
out-of-band capacity constraint is ignored and ΣQ = 0, so the destination has an exact reconstruc-
tion for the relay’s signal.
The baseline (BL) scenario should result in the weakest user rates. One of the cooperative relaying
strategies should at least outperform the IPB case to result in a higher spectral efficiency.
The distribution of the ergodic rates is calculated via Monte-Carlo simulation by first randomly
generating the locations of users, and for each set of user positions a number of simulations are made
by randomly generating the fading coefficients. The distribution of rates is shown in Figure 3.4.
Notice that there is little benefit to relaying in the CFUQ case (as it barely surpasses the baseline BL),
while the CFOQ case almost achieves the AP upper bound. This shows the importance in optimization
of the quantization matrix with multiple antennas at the relay. The AF case has modest gains, with
improvements over the CFUQ case because AF has better spectral efficiency in the out-of-band channel
because the interference between relays is not treated as noise, which limits the out-of-band capacity
under compress-forward. Another thing to note is that the AP and CFOQ cases have the largest benefit
for weak users. This can be seen by noticing that relaying is a better strategy for weak users, while
increasing the bandwidth (IPB) is most beneficial for strong users. This is due to the placement of the
relays along the cell-edge as well as the fact that relaying is most beneficial when interference is high,
which is less likely for users closer to the center of the cell.
3.6 Discussion
The simulation results indicate that compress-forward relaying can be a viable strategy for improving
the rate of cell-edge users given that proper CSI is available at the relay for optimization of the quanti-
zation noise covariance. Relaying is also most beneficial when there are multiple antennas at the relay.

Chapter 3. Theoretical Results 33
0 10 20 30 40 50 60 70 80 90 100
0.2
0.4
0.6
0.8
Rate R (Mbits/second)
CDF
Distribution of User Rates
BLIPBAF
CFUQCFOQAP
Figure 3.4: Distribution of user rates for the cellular network simulation under the various scenarios.
Simulation results show that having only a single antenna does not seem to be sufficient to mitigate the
interference. Simulation results show that at least two should be used in order to outperform allocation
of the out-of-band link for use by the base-stations.
In a standard compress-forward implementation the out-of-band link capacity would need to be sent
to the relay as part of the CSI so the relay can set an appropriate coding rate for proper decoding of
the relay’s message at the destination. This CSI information is not necessary if amplify-forward is used,
but at the cost of the Wyner-Ziv gain. HCAF could also be used instead, which does not require the
out-of-band link CSI while attaining the same bounds at CF-WZ.

Chapter 4
Synchronization
In this chapter, carrier frequency synchronization and timing synchronization in a cooperative relay
network will be analyzed for both AF and CF relaying. In both cases, the nature of the CFO impairments
for the relay network will be first analyzed, and then strategies for estimating the CFO for correction at
the destination will be described. The main complication of CFO estimation when compared to point-
to-point communication is that the destination must correct three CFO impairments: the CFO from the
source-destination, the source-relay CFO, and the relay-destination CFO under the out-of-band link.
As previously mentioned in Section 2.4, synchronization typically takes place after detection. In an
interference-limited network, it may not be possible for the relay to synchronize with the transmitter
because it may not be able to detect the pilot signal. Synchronization can only occur after the signals
from the relay and destination are combined and the correlated interference is canceled.
Under both AF and CF, the relay receives a signal from the source which is then converted to
baseband by the use of a local oscillator (LO). The baseband signal at the relay is prone to CFO
impairments due to differences in the source’s and relay’s LOs. The destination receives a signal from
the relay, which is influenced by CFO impairments due to the relay and destination’s LOs, and a signal
from the source, which is influenced by the source’s and destination’s LOs. In the implementation being
considered, CFO impairments are not adjusted at the relay, and all impairments will be accounted for
at the destination. Therefore, the cumulative influence of all the impairments will be observed at the
destination. Figure 4.1 illustrates an RF chain for a USRP UBX daughterboard, illustrating how the
reference signal is used to help convert a complex-valued IQ signal at baseband to and from the carrier
frequency, ω0.
To begin the analysis, the following functional operators are defined:
TX(y, ω) = Re(y(t)) cos (ωt)− Im(y(t)) sin (ωt) (4.1)
RX(y, ω) = LPF(2y(t)e−iωt
)(4.2)
The operator TX takes a complex baseband signal and modulates it up to the desired carrier fre-
quency, and then combines the in-phase and quadrature components into a real-valued signal. The
operator RX performs the inverse operation by converting the real-value signal back down to baseband
(in 4.2, LPF is an ideal low-pass filter). The result of the RX operation is a complex-valued signal made
up of the in-phase and quadrature components.
34

Chapter 4. Synchronization 35
Figure 4.1: Diagram for a UBX daughterboard for USRP software-defined radios showing both the RXand TX chains. The TX chain mixes the in-phase and quadrature parts of a complex-valued signal andmodulates it to the carrier frequency using the reference REF. The RX chain demodulates the signalfrom the carrier frequency down to baseband, and decouples the in-phase and quadrature parts. Imagefrom https://www.ettus.com.
Consider the effect of a simple point-to-point transmission-reception operation:
x→ TX (ω1)→ RX (ω2)→ y (4.3)
This notation is taken to mean y = RX(TX(x, ω1), ω2). ω1 > 0 and ω2 > 0 are the frequencies of the LOs
of the transmitter and receiver, respectively, which slightly deviate from the nominal carrier frequency.
It is assumed that the baseband signal x is band-limited and the spectrum of x is between ±ωx for some
ωx ≥ 0. Let ωLPF be the cutoff frequency for the low-pass filter in the RX operation. It is assumed that
ωLPF satisfies
ωx + |ω1 − ω2| < ωLPF < ω1 + ω2 − ωx. (4.4)
Intuitively, the left-hand constraint is required to ensure that the original signal can be recovered after
filtering, and the right-hand bound is required to ensure that the high-frequency copy of the signal is
removed from the signal, as will be demonstrated.
Note that for a typical RF environment |ω1 − ω2| � ωx � ω1 + ω2 (the left-hand side is the CFO
and the right hand side is roughly double the carrier frequency). Assuming (4.4) holds, y can be written

Chapter 4. Synchronization 36
as
y(t) = LPF(2 (Re(x(t)) cos (ω1t)− Im(x(t)) sin (ω1t)) e
−iω2t)
(4.5)
= LPF
(2
(Re(x(t))
eiω1t + e−iω1t
2− Im(x(t))
eiω1t − e−iω1t
2i
)e−iω2t
)(4.6)
= LPF(x(t)ei(ω1−ω2)t + x′(t)e−i(ω1+ω2)t
)(4.7)
= x(t)ei(ω1−ω2)t (4.8)
where (4.8) follows due to the constraint (4.4). Therefore, the total effect of the transmission-reception
operation is a CFO modulation of ω1−ω2. Without any oscillator impairments, one would have ω1 = ω2
and x would be recovered exactly. Otherwise, the impairment ω1 − ω2 would have to be estimated and
adjusted for by modulating y by e−i(ω1−ω2)t. Using this result, we can examine the CFO effect for
amplify-forward and compress-forward in the following two sections. Throughout this chapter, channel
effects such as fading and noise are ignored because they do not influence the CFO.
In the following analysis, it is assumed that the carrier frequency at the relay used for demodulation
of the transmitter’s signal is equal to the carrier frequency used for modulation of its transmitted signal
to the destination (that is, they operate at the same carrier frequency and there is no CFO impairment
between them). To account for local oscillator impairments, this means in practice that the same local
oscillator being used for demodulation in the RX chain is also used for modulation in the TX chain.
Moreover, it is assumed that the same local oscillator is used at the destination for demodulation of the
transmitter’s signal and relay’s signal. Therefore, to create the out-of-band relay link, one option is to
have the primary band and out-of-band links adjacent to each other in frequency. This can allow for the
same oscillator to be used at the relay, and a single RX chain at the destination to recover both bands
simultaneously. After recovering both bands, the destination can further separate them with appropriate
modulation and band-pass filtering.
This solution will be made more concrete with an example. Suppose one desired a primary bandwidth
of 5 MHz, and a secondary bandwidth of 2 MHz at a carrier frequency of ω. The primary band would be
in the range ω to ω + 5 MHz, and the secondary band would be in the range ω + 5 MHz to ω + 7 MHz.
The source, relay, and transmitter would all set their LO to use carrier frequency ω. The relay would
demodulate the signal from the primary band at a sampling frequency of 5 MHz. To transmit its signal
to the destination, it would first take the 2 MHz baseband signal, oversample it to at least 7 MHz,
modulate it digitally by 5 MHz, then transmit this signal at the frequency ω, using the same LO used
in the receive chain (full-duplex capabilities at the relay are assumed for simultaneous reception and
transmission). Using a USRP, the baseband modulation of 5 MHz could be done by using the CORDIC
processor on the FPGA or directly on the host computer. The destination would receive a single signal
at frequency ω, sampled at 7 MHz which is comprised of both the primary and secondary band. After
demodulating the 7 MHz signal from the carrier frequency to baseband, the signal is further split into
the 5 MHz and 2 MHz parts, and the 2 MHz part is further demodulated to baseband.
The following two sections will illustrate how the CFO impairments are received at the destination,
and how they can be estimated and corrected, under AF and CF relaying. Let ωs, ωr, and ωd denote
the carrier frequencies for the source, relay, and destination respectively, which deviate slightly from the
nominal carrier frequency ω due to instrumentation errors.

Chapter 4. Synchronization 37
s
r
Compress-Forward
d
ωs − ωr ωr − ωd
ωs − ωds
r
Amplify-Forward
dωs − ωd
ωs − ωd
Figure 4.2: Signal paths for amplify-forward and compress-forward relaying, highlighting the influenceof CFO on the signal between the source (s), relay (r), and destination (d). Under AF, the influenceof ωr is automatically canceled in the signal observed at the destination. Under CF, the influence of ωrhas to be explicitly managed.
4.1 Synchronization for Amplify-Forward
We first consider the amplify-forward relay network. We can trace the modulated frequency for the two
signal paths; first for the source-destination path:
x→ TX (ωs)→ RX (ωd)→ yd (4.9)
and secondly for the source-relay-destination path:
x→ TX (ωs)→ RX (ωr)→ TX (ωr)→ RX (ωd)→ yrd (4.10)
For the source-destination path, the resulting CFO in yd is ωs−ωd. For the source-relay-destination
path, the resulting CFO of yrd is ωs − ωr + ωr − ωd = ωs − ωd. Therefore, the carrier frequency of the
relay ωr has no impact on yrd as ωr is canceled between demodulation during reception, and modulation
on re-transmission. Thus, both yd and yrd are influenced by the same carrier frequency offset at the
receiver, namely ωs − ωd, so both signals can be used to estimate the common CFO. A diagram of the
two signal paths and the CFOs is illustrated in Figure 4.2.
The cancellation of the relay’s CFO impairments could dramatically simplify the implementation of
an AF relay network because synchronization becomes no harder for AF than it does for a single-input
multiple-output point-to-point network with a common CFO between source and destination. In [14],
this advantage was exploited to have the relay share the same bandwidth as the source, rather than
relying on orthogonal bands. Doing so does not present any major synchronization problems under AF
than it may for other relaying strategies where ωr plays a role.
Moreover, this advantage makes it possible for multiple AF relays to operate over the same bandwidth
at the same time without destructive interference between the relays. Because the influence of each relay’s
LO is irrelevant for the received signal at the destination, multiple relays can actively superimpose their
transmitted signals without any issues related to frequency synchronization. This property can provide
a natural advantage compared to compress-forward; where multiple active relays have to treat the other
relays’ signals as interfering noise, limiting the capacity over the out-of-band link.
The validity of this CFO cancellation in an amplify-forward relay network was experimentally con-
firmed in [14]. In the experiment, a source sent a constant-value baseband signal to the relay, which
converts the received signal to baseband before re-transmitting it back to the source in an amplify-forward

Chapter 4. Synchronization 38
fashion. The carrier frequency impairments can be modeled as
x→ TX(ωs)→ RX(ωr)→ TX(ωr)→ RX(ωs)→ y (4.11)
The expected CFO of y is therefore ωs − ωr + ωr − ωs = 0. In the experiment, the received signal at
the transmitter y was observed to be roughly constant without any CFO impairments, confirming the
assumption that the CFO effects between modulation and demodulation were being canceled.
4.2 Synchronization for Compress-Forward
We can perform a similar analysis for compress-forward relaying as we did for amplify-forward. This
time we will consider three signal paths. The first path is the source-destination path, the same as
before:
x→ TX (ωs)→ RX (ωd)→ yd (4.12)
The second path is the source-relay path:
x→ TX (ωs)→ RX (ωr)→ yr (4.13)
The received signal at the relay yr is quantized and sent to the destination. The third path is the
relay-destination path, which is used for transmitting the quantized signal message:
xr → TX (ωr)→ RX (ωd)→ yrd (4.14)
The CFO for yd is ωs − ωd, the CFO for yr is ωs − ωr, and the CFO for yrd is ωr − ωd. A diagram of
the signal paths and the CFOs for compress-forward is illustrated in Figure 4.2.
Unlike amplify-forward relaying, there is no cancellation of the relay’s frequency component in the
carrier frequency offsets, but, as will be shown, the destination can still correct for the relay’s impairment
to ensure yd and the quantized signal share the same CFO.
The destination has immediate access to the signal yd. Moreover, after detection of the relay’s signal
yrd, the destination estimates the CFO ωr − ωd. This estimate is acquired immediately after detection
of the signal from relay to destination. If the signal yd was modulated with the correction CFO ωd −ωrto produce a new signal yd(t) = yd(t)e
i(ωd−ωr)t. The CFO of yd is therefore ωs−ωd+ωd−ωr = ωs−ωr,which shares the same CFO with yr.
Unlike amplify-forward, this adjustment cancels the effect of the destination on the CFO, rather than
the relay. This adjustment of yd can be made after synchronization with the relay-destination signal,
but before source decoding. Therefore, the adjusted signal yd can then be used as side information for
decoding of yr with Wyner-Ziv coding because yr and yd share the same CFO.
Another consideration is that of timing alignment between the signals yr and yrd at the destination. If
Wyner-Ziv coding is being applied for transmission of the relay’s quantized signal, then timing alignment
will have to be done before decoding of the relay’s message to ensure proper usage of the side information
yd. This can be managed by having the relay fix the time difference between the time of reception of
relay’s received signal yr, and the transmission time of its signal xr. The destination can then use the
detection time of xr to align the quantized signal by subtracting the delay from the signal from the
source yd.

Chapter 4. Synchronization 39
These considerations show how the synchronization values acquired for reception of the relay’s mes-
sage at the destination play an important role in further synchronization of the quantized signal with the
primary signal received at the destination. In summary, the CFO estimate is used for synchronizing the
frequencies between the two signals, and detection timing is using for timing synchronization between
the signals.
There is another consideration regarding the out-of-band assumption for the operation of the relay.
This analysis assumes a coherency (i.e. timing and frequency synchronization) between transmission and
reception at the relay, and reception over the primary and out-of-band channels at the destination. This
may not be achievable with completely separate RF chains for the primary and secondary bands. For
the implementation presented in this thesis, the primary and secondary bands will be placed adjacently
in frequency, and will be modulated to the carrier frequency using a shared LO.

Chapter 5
Design of the Compress-Forward
Relay Network
This chapter outlines the design of the cooperative relay network for interference mitigation based on
the results from the previous chapters. The setup consists of a transmitter node, a relay node, a receiver
node, and a single interfering node. The transmitter node and interfering nodes transmit packets in
an ad hoc manner (i.e. no frequency, time or coding division, so they interfere with one another). A
compress-forward relaying scheme is used between the relay and destination nodes to decode the signal
from the transmitter node while treating the signals from the interfering nodes as noise. There is a
separate out-of-band channel used by the relay to send its compressed samples to the destination node.
The out-of-band channel is unused by the transmitter and interfering nodes. The “primary band” refers
to the band used by the transmitter and interfering nodes, while the “secondary band” refers to be band
used by the relay.
In this setup, there is a single interfering node. The transmitter, relay, receiver, and interfering node
each have a single antenna. In Section 3.5, it was concluded that multiple antennas at the relay can
be beneficial if the relay optimizes the quantization noise on the received signal at the relay. Optimal
quantization would require channel estimation at the relay and feedback of the destination’s CSI. As
this will add substantial complexity to the implementation, having multiple relay antennas is outside
the scope of the thesis. Instead, the implementation is intended to demonstrate how certain practical
considerations may be managed.
Three additional design decisions are made to permit synchronization. First, it is assumed that the
same local oscillator is used at the relay to demodulate the received signal over the primary band as to
modulate the relay’s transmitted signal over the secondary band. Second, it is assumed that the same
local oscillator is used at the destination to demodulate the signal from both the primary and secondary
band. Third, it is assumed that all nodes are physically stationary to one another so that Doppler
effects are negligible. Presuming these constraints allows for convenient frequency synchronization at
the receiver node between the samples received over the primary band and the decoded samples from the
relay. The synchronization implication of these constraints for compress-forward relaying was presented
in Section 4.2.
The rest of this chapter outlines the compress-forward relay setup for the transmitter, relay, and
destination. The design is influenced by the theoretical description of compress-forward presented in
40

Chapter 5. Design of the Compress-Forward Relay Network 41
Section 2.1 and Section 3.2.
The transmitter node transmits data in distinct packets. A detailed description of these packets is
presented in Section 5.1. The operator of the relay is presented in Section 5.2.
The receiver’s decoding scheme can be separated into two distinct parts. The first part consists of
decoding the compressed data stream received over the out-of-band channel from the relay and synchro-
nizing it with the source-destination stream, resulting in a single two-dimensional stream. Synchroniza-
tion of the two streams occurs in time (by aligning the stream samples appropriately relative to one
another), and in frequency (by modulating the streams so that the carrier-frequency offset is the same
between the source and all the sub-streams). Details of decoding the relay’s compressed data stream is
presented in Section 5.3.
The second part of the receiver’s decoding scheme involves decoding the transmitted message using
the multi-dimensional stream. The main factor to consider here is the application of receiver beamform-
ing techniques so that the correlated interference can be mitigated when the number of transmitting
antennas at the source is less than the sum of relay and receiver antennas. Decoding the source’s
transmitted message is explained in more detail in Section 5.4.
The two distinct decoding stages attempt to solve two separate problems. The problem solves by the
first stage is relay decoding and synchronization. This is independent of the interference on the primary
band. The second stage is mitigates the interference and recovers the transmitted signal. This stage
works independently from the relay..
5.1 Transmitter
The transmitter takes a stream of binary data and maps it onto a stream of packets, which are then
transmitted over the primary channel. The packets are formatted using OFDM and each packet is
prefixed by a pilot signal used for detection, synchronization, and initial channel estimation as described
in Section 2.4.
The payload follows the pilot signal in the packet structure. For this thesis, the payload does not
undergo channel coding, and is generated randomly. The binary data representing the payload is first
mapped onto complex-valued constellation points (either QPSK or 16-QAM in this work), and these
points are mapped onto OFDM subcarriers. Some of the OFDM subcarriers are used for channel
estimation and each OFDM frame has a cyclic prefix (see Section 2.3). Because channel coding is not
used, the performance measure used in this thesis will be the bit error rate between the transmitted
payload data and the received payload data. The packet parameters are provided in Table 5.1.

Chapter 5. Design of the Compress-Forward Relay Network 42
Packet Specification
FFT length 64Cyclic Prefix Length 16samplesframe
= FFT + C.P. length 80pilot frames
packet2
payload framespacket
4
framespacket
=pilot + payload frames
packet6
samplespacket
= framespacket
× samplesframe
480
# occupied subcarriers =symbolsframe
48
# of pilot subcarriers 4samplessecond
5× 106
packetssecond
=samplessecond
/ samples
packet10 416.67
Payload ConstellationQPSK 16-QAM
bitssymbol
2 4
bitsframe
= bitssymbol
× symbolsframe
96 192
bitspacket
= bitsframe
× packetsframe
384 768
bitssecond
= bitspacket
× packetssecond
4× 106 8× 106
Table 5.1: Packet specification over the primary channel used by the transmitting node. It should alsobe noted that the DC subcarrier and the subcarriers at the edge are unused, as discussed in Section 2.3.

Chapter 5. Design of the Compress-Forward Relay Network 43
Relay Message Encoding & Transmission
SR RX
SignalFragmentation
AGC QuantizationSource
EncodingChannelEncoding
RD TX
ysr xrd
Figure 5.1: Processing of the received signal at the relay and re-transmission. The signal is partitionedinto fixed-sized fragments, each fragment has its gain normalized, each fragment is quantized, and thenthe quantized codeword is mapped to its binary representation, which is then encoded for transmissionover the channel.
The omission of channel coding also means that feedback is not required at the transmitter for
choosing a suitable coding rate. It should be noted that the transmitter design is essentially a standard
OFDM transmitter design and is not aware of the relay in any way. In a real network, the communication
protocol at the base-station would therefore not have to change due to the presence of relays.
In the implementation, sources of interference will take the same design as the transmitter. The source
of interference will generate data and simply transmit it. Another consideration in the implementation
is the delay between consecutive packets, which can also be adjusted. This is important because the
destination needs a certain number of samples to estimate the noise and interference covariance before
it can detect the signal from the transmitter. This will be described in more detail with the testbed
experiments in Chapter 6.
5.2 Relay Encoding and Transmission
The relay is responsible for quantizing its observed samples, source encoding these quantized samples,
and sending the encoded samples to the destination over the secondary channel.
As previously mentioned, there is no channel estimation at the relay, nor is there feedback from the
destination. Before quantization, the stream of received samples at the relay is fragmented, so that the
signal can be forwarded to the destination using a sequence of payloads. This fragmentation simply splits
the received signal into fixed sized fragments. The fragment length should be chosen based how much
data can be fit into a single out-of-band link packet. For this reason, the fragment length is inversely
proportional to the number of quantization bits per sample.
Each fragment is then processed independently. A gain factor is applied to each fragment so that each
fragment has the same variance after normalization. The differential gain between the current fragment
and the previous fragment needs to be sent to the destination as part of the fragment metadata so that
the destination can undo the gain adjustment to prevent spurious changes in gain between fragments
when the calculated gain changes.
The next step is to quantize the fragment. In this thesis only a scalar quantizer was considered.
Once the fragment is compressed into a binary representation, it can be transmitted over the out-
of-band channel to the destination. The implementation mirrors a typical OFDM implementation, as
described in Chapter 2.
The relay has to fix the transmission time of the first sample relative to the first sample of the
fragment so that the destination can synchronize the fragment. This time delay parameter is fixed
beforehand and is known to both the relay and destination. The time delay parameter that is chosen for
re-transmission must be greater than the duration of the fragment plus the time that it takes to quantize

Chapter 5. Design of the Compress-Forward Relay Network 44
Relay Message Decoding and Synchronization at Destination
ysdSD RX Synchronization
ysd
(ysdysr
)
syncedRX
yrdRD RX
ChannelDecoding
mr
ωrd, t0
SourceDecoding
ysr
Σysdysrsource
statistics
Figure 5.2: Data from the source-destination channel and the out-of-band relay-destination channel areprocessed to produce a synchronized stream of source-destination and decoded source-relay data.
and encode it. The receiver delays its own received signal from the primary channel by this same delay
so that it can synchronize the two signal streams. This is discussed in the next section.
5.3 Receiver Relay Decoding
The first stage of decoding at the receiver is to decode the compressed samples sent from the relay and
to synchronize these samples with those received on the primary channel. The routine that is used for
this operation expands upon a typical OFDM receiver. The primary changes in this implementation is
the synchronization stage, which uses the timing offset and carrier frequency offset estimate calculated
on reception of the out-of-band-message to synchronize the forwarded signal from the relay with the
received signal at the destination over the primary band.
The first step is to detect the signal and estimate the CFO and timing offsets. This follows the
approach of [25] as discussed in Section 2.4. Next, the receiver finds a fragment of its own received
signal that will be synchronized with the relay’s quantized signal. The timing offset from detection is
used to pick the starting point of the fragment. Next, the entire fragment has a CFO correction based
on the estimated CFO from the relay. This allows for both the relay’s and destination’s fragments to be
synchronized in time and frequency, as in Chapter 4. The receiver fragment is also normalized based on
the AGC correction made by the relay, as mentioned in Section 5.2.
At this point, the compressed fragment from the relay can be recovered. Channel decoding first takes
place. In this implementation, there was only a sum-check using the CRC32 routine. This was sufficient
for this application because the SNR on the out-of-band channel was low. This could be replaced with
a forward error-correcting code if necessary.
Next, the fragment can be uncompressed. As previously mentioned, distributed source coding was not
used in the final implementation; therefore, the signal can be uncompressed without the fragment from
the primary band. If distributed source coding was used, the primary band fragment could effectively
be used as side information because both fragments are already synchronized.
The two fragments are now joined together to make a single two-dimensional fragment. The fragments
can now be passed to the decoding stage to recover the signal from the transmitter. The fragment
boundaries are removed so that the second decoding stage has a continuous stream of samples.

Chapter 5. Design of the Compress-Forward Relay Network 45
5.4 Receiver Source Decoding
At this stage, the forwarded signal from the relay and the destination’s received signal are merged
together and are processed jointly. If there was no interference, a typical one-input two-output OFDM
receiver algorithm could be applied to recover the transmitted message. This algorithm is adjusted to
first correct for the interference before recovery of the message.
The outline of this process is as follows. First the joint interference statistics are estimates for both
signals. These statistics are then used to design a filter that mitigates the interference by rejecting the
signal dimension with the highest interference variance. This filter outputs a single-dimensional stream,
which is mostly orthogonal to the interference. This output is then passed to a single-input single-output
OFDM decoder.
The outline of the scheme is shown in Figure 5.3.

Chapter5.
Desig
noftheCompress-F
orward
RelayNetwork
46
Transmitter Message Decoding at Destination
SpectralEstimation
sourcestatistics
syncedRX
InterferenceCancellation
y Detection+Timing+CFO
ω, t0
Synchronization EqualizationChannelDecoding
m DecodedMessage
Σysdysr
(ysdysr
)
Figure 5.3: Data from the source-destination channel and the out-of-band relay-destination channel are processed to produce a synchronized streamof source-destination and decoded source-relay data.

Chapter 5. Design of the Compress-Forward Relay Network 47
5.4.1 Spectral Estimation
At this stage the power spectrum across is estimated across the multi-dimensional signal. As it is
assumed that both the relay and destination each have one receive antenna, we are therefore presented
with a two-dimensional complex-valued time series; however, the method presented in this section can
be used with any number of signals.
The purpose of the spectral estimation is to construct interference-plus-noise covariance matrices
for each subcarrier that can be used to mitigate the influence of interference. This nulling must take
place before detection of the signal from the source transmitter because the presence of interference may
prevent detection or adequate estimate of the channel parameters. The estimation is unguided, in the
sense that it does not require a pilot signal from the interference source, and the estimation is done using
only the statistics of the received signal.
More formally, we can presume we are given a sequence x(t) ∈ Cn, where n is the dimension of the
multi-variate time series and we would like to derive a spectral covariance estimate Σ(f, t) ∈ Cn×n. The
time index t is discrete and matches the sample rate of the transmitted signal, while the frequency index
f is equal to the number of OFDM subcarriers. This way there is a noise covariance matrix that can be
used for equalization of each subcarrier.
The time variation in the power spectrum is derived from two sources: the first source of time
variation is due to the fact that the transmitter and sources of interference transmit each packet as a
burst, with a delay between packets. This leads to instantaneous changes in the power spectrum due
to the transmitters turning on and off. The second source of time variation is caused by variations in
channel state.
The performance of the SDR relay network turned out to be very sensitive to the accuracy of the PSD
estimation when subjected to correlated interference. The reason for this is because suitable performance
of many of the other components in the receiver is dependent on an accurate PSD estimation. Specifically,
the PSD estimation is used to construct an interference-nulling filter for detection of the received signal,
as well as timing and frequency synchronization. The PSD estimate is also used in channel estimation
from the pilot signal. Finally, the PSD estimate must be accurate enough to null a sufficient amount of
any correlated interference. The large influence of the PSD estimation, therefore, lends to the importance
of its accurate performance.
Substantial empirical testing took place to find the best method for PSD estimation in the context
of interference cancellation. One conclusion that was drawn was that it is necessary to detect the
abrupt changes in energy level associated with transmission bursts (both from the source transmitter
and interfering transmitters), both at the beginning and end of a burst, in order to achieve suitable
performance.
The initial implementation did not account for these transitions, and instead the PSD estimate was
calculated using data over a fixed-sized moving window around the given point in time. The reason why
this method fails is because each packet begins with a pilot signal which is used for detection, synchro-
nization, and channel estimation. Furthermore, when a packet is transmitted there is an instantaneous
change in energy level so the PSD estimate at the point of detection is very inaccurate, as it is calculated
from samples from both before and during the transmission. This inaccurate PSD estimate calculated
over the duration of the pilot signal therefore negatively affects the ability for detection, synchronization,
and channel estimation; and overall performance is significantly reduced.
For this reason, the initial implementation for PSD estimation was improved by including the ability

Chapter 5. Design of the Compress-Forward Relay Network 48
fft fft fft fft fft fft fft fft fft t
f
t
Figure 5.4: Construction of the time-frequency samples ψ(t, f) used for PSD estimation. Overlappingwindows are first applied to the time series by multiplying the time series by the shifted window function.The FFT is then applied to each window to produce time-frequency samples.
to detect PSD changes at discrete points in time. Therefore, before producing the final PSD estimate,
the incoming signal is first fragmented around the detection of change-points corresponding to an instan-
taneous change in the PSD. Each fragment is an interval of the signal bounded by two change-points.
The PSD estimation at any point in time was then calculated using only the data contained in its
corresponding fragment.
The detection of these change-points is independent from the detection of pilot signals, despite the
fact that each pilot signal should also lead to a PSD change-point. There are a few reasons for this
approach: The first is that it minimizes coupling between components (specifically the PSD estimator
and the pilot signal detector), therefore leading to a simpler design. Secondly, the pilot signal detection
takes place after interference filtering, which requires the PSD estimate. Thirdly, change-points need to
be detected at the start of a burst, as well as at the end, so there are more change-points than pilot
signals. Fourthly, a separate detection allows for the scheme to work with sources of interference whose
pilot signals are not detected.
The method that ended up being used is based roughly on Welch’s method for power spectral es-
timation as in [26] and is outlined as follows: First, the multi-variate time series x(t) is broken up
into overlapping blocks in time. Each block is then multiplied by a Blackman window [27] across every
dimension, and then a 1D FFT is applied to each of these blocks across every dimension. It is important
to multiply the data by a suitable windowing function in order to minimize the effects of sidelobes in the
power spectral estimate (multiplication by a window function in the time domain leads to a convolution
in the frequency domain). To summarize, the multi-dimensional time series has been transformed into
a set of samples that are referenced both in time and frequency. This is visualized in Figure 5.4.
Mathematically, this operation is given by
ψ(t, f) =
N−1∑
n=0
e−2πifn/Nw(n)x
(Mt+ n−
⌈N
2
⌉)(5.1)

Chapter 5. Design of the Compress-Forward Relay Network 49
for 0 ≤ f < N where
w(n) =
0.42− 0.5 cos 2πnN−1 + 0.08 cos 4πn
N−1 , 0 ≤ n <⌈N2
⌉
w(⌈N2
⌉− n
),
⌈N2
⌉≤ n < N
(5.2)
is the Blackman window. It is important to note that the time index does not translate directly to the
same scaled time index for the original time series, and the time scale is determined by the parameter M :
the stride distance between windows. The resolution of the frequency is determined by the number of
points in the window N . A reasonable value for M is to make it roughly half of N , so there is about 50%
overlap of samples between adjacent windows. Making M too small will lead to excessive correlation
between samples. M can also be made larger to reduce computational cost if the PSD is expected to
change slowly. The parameter N should be chosen to achieve the desired spectral resolution. In an
OFDM system, N should be equal to the number of OFDM subcarriers.
The power spectral estimate at a given frequency and time is produced by estimating the covariance
of the samples at the given frequency referenced around the given point in time, while taking into account
the locations of the previously mentioned change-points. Appropriate selection of the samples in time is
crucial for an accurate power-spectral estimation, as mentioned above.
We now consider the question of how to detect the instantaneous changes in the PSD. An initial
attempt was made using the change-point algorithm in [28], which has an existing implementation in
MATLAB. The basic idea behind the formal change-point problem is to partition a time-series into
intervals, and a cost is assigned to each interval based on how a model fits the data in the given interval.
The goal is to find a partitioning so that the sum total of all the costs is minimized. The number of
intervals may either be fixed, or there may be a cost associated with introducing each new interval for
regularization purposes.
Using the MATLAB change-point function, a partitioning program was designed for finding the
changes in the PSD. The routine was able to accurately locate the changes, but it still has a few
disadvantages: the first is that the MATLAB implementation of the change-point function was very
slow (too slow for real-time computation in the SDR setup when processing at 10 Msps). The change-
point algorithm also works with blocks of data, whereas it would be preferable to have a streaming
algorithm.
Based on these limitations, a new approach was taken to find the changes in the PSD. To motivate
the approach a related problem will be first considered. Suppose one has two multi-variate data sets
x1, . . . ,xn ∼ CN (0,Σ1) and y1, . . . ,ym ∼ CN (0,Σ2) where it is assumed that x1, . . . ,xn,y1, . . . ,ym
are independent and Σ1 and Σ2 are unknown. Then suppose we propose the hypothesis: does Σ1 = Σ2?
This problem is a well-studied statistical problem whose solution can be found in [29]. It is fairly
easy to show that the likelihood ratio criterion for testing the hypothesis is
φ({x1, . . . ,xn}, {y1, . . . ,ym}) =|n−1A1|n|m−1A2|m
|(n+m)−1
(A1 +A2) |n+m(5.3)

Chapter 5. Design of the Compress-Forward Relay Network 50
where
A1 =
n∑
i=1
xixTi
A2 =
m∑
i=1
yiyTi .
are the sample covariance matrices of the two data-sets, without normalization.
It should be noted that this test statistic φ may become unstable when there is large variation among
the eigenvalues of either A1 or A2 due to instability in their determinants. This circumstance may be
encountered in practice when there is heavy interference power along a subspace of the xi samples, and
substantially less power in the null-space. In these circumstances, it may make sense to regulate the
test statistic by replacing A1 with A1 + δ trA1
M I for some δ ∈ (0, 1], for example. The same replacement
should be made with A2.
This likelihood ratio test can then be used to construct a test for finding changes in the PSD. To
check for a change-point at time t, we first take samples from ψ before and after t for each frequency f :
S1(t, f) = {ψ(t− τ, f) : 1 ≤ τ ≤M}S2(t, f) = {ψ(t+ τ, f) : 1 ≤ τ ≤M}.
These are then used to calculate the detection statistic at time t:
α(t) =1
N
N−1∑
f=0
log φ(S1(t, f), S2(t, f)). (5.4)
This statistic can be interpreted as a log-likelihood. By testing the statistic against a threshold, the
change-points in the signal are detected. The change-points are used to partition the incoming signal
into fragments. A fragment is also output if the current fragment exceeds a given threshold.
The individual fragments are then processed separately. Let t0 and t1 be the endpoints of the current
fragment. There is a uniform PSD estimate over the fragment given as
Σt0,t1(f) =
t1∑
t=t0
ψ(t, f)ψT (t, f) (5.5)
These PSD estimates are used for interference cancellation before detection purposes and for equalization
before channel decoding, as illustrated in Figure 5.3. Interference cancellation is covered in the next
subsection.
5.4.2 Interference Cancellation
The purpose of the interference cancellation block is to remove any correlated interference within the
received signals to allow for detection and synchronization. The interference cancellation is done using
an adaptive FIR filter using the PSD estimate described in Section 5.4.1. The resulting FIR filter is
multiple-input, single-output. Therefore, the detection and synchronization components that follow are
themselves single-input.
As previously mentioned, the interference cancellation occurs before detection of the signal from the

Chapter 5. Design of the Compress-Forward Relay Network 51
source. This mitigates the impact that the interference would otherwise have on detection and estimation
performance.
In addition to nulling the correlated interference, the FIR filter also needs to be designed to minimize
temporal dispersion on the output stream. In other words, the effective number of taps in the filter
should be small. The reason for this is because if the filter is too long, it can lead to inter-symbol
interference from the symbols following the pilot signal onto the pilot signal itself during detection,
which can reduce performance. To prevent this phenomenon, the total dispersion induced by multi-path
propagation in the channel combined with the interference-canceling FIR filter must be less than the
length of the cyclic prefix.
Another factor that needs to be considered is the arrival times between packets from the transmitter.
There are two possible scenarios: in the first scenario, there is a considerable delay between packets; in
the second scenario, packets are sent directly one after the other. The nature of the packet transmissions
influences the interpretation of the PSD estimate. When there is a long delay between packets, the PSD
estimate leading up to the point of detection is composed only of noise and interference. When there is
no delay between packets, the PSD estimate is also composed with the PSD of the previous packet.
Therefore, to construct an interference-nulling FIR filter, it is necessary to first subtract the influence
of the intended transmitter from the PSD estimate so that the desired signal itself is not canceled. This
leads to a PSD estimate that consists only of noise and interference.
The SDR implementation did not support this signal subtraction stage due to time constraints. For
this reason, the implementation can only deal with decoding of single packets at a time followed by a
delay so that the PSD estimator can acquire an accurate estimate of the correlated interference. To
allow for decoding of packets without any intermittent delay, the aforementioned strategy would also
need to be implemented.
We now turn our attention back the question of the actual FIR design. The spectral estimate from
Section 5.4.1 is used to construct the filter, as shown in Figure 5.3.
Based on the previous discussion, it is assumed that the incoming signal was broken into fragments
around change-points. Let Σ(f) denote the PSD estimate for the current fragment for 0 ≤ f < N as in
(5.5). Let v(f) be the eigenvector of Σ(f) corresponding to the smallest eigenvalue. Moreover, assume
that v(f) is normalized so that its first component is equal to 1. Using an IFFT, the eigenvectors are
translated into the time domain:
w(τ) =
N−1∑
k=0
e2πiτk/Nv(k), 0 ≤ τ < N. (5.6)
Note that because of the normalization of v(f), the first component of w is a δ-function with a peak
at τ = 0. This is because v(t) is constant 1 in its first component, so its representation in the time
domain must be a δ-function. We move the peak to the center of the window M = dN2 e with a circular
time-shift:
w(τ) = w(τ +M mod N), 0 ≤ τ < N. (5.7)
Now the peak is at τ = M . Let wi(τ) be the value of w(τ) along the ith dimension for i ∈ {1, . . . ,K}.
Let x(t) be the time-series to be filtered. The filtered time series is constructed by applying a

Chapter 5. Design of the Compress-Forward Relay Network 52
convolution to each dimension and then summing resulting signals:
x =
K∑
i=1
wi ∗ xi. (5.8)
This operator can be interpreted in the frequency domain as projecting each frequency component of
x onto the dimension with minimal interference (i.e. the smallest eigenvalue v(f)). In the time domain,
this operator can be interpreted as subtracted from x1 the correlated interference found in x2, . . . , xK .
There are two other benefits of this interference cancellation technique: The first is that it presents
a simple way of translating time indices between the filtered time series and the original set of unfiltered
time series due to the time domain interpretation of the filtering (subtracting correlated interference
from x1). This is necessary because the filtered time series is used for timing offset synchronization, and
so it is therefore necessary to translate the calculated timing offset back to the original set. Let t0 be
the timing offset calculated in the filtered time series. This would translate back to t0 = t0 +M in the
original series. The offset of M is due to the shift induced by the δ-function time-shift filter w1.
The other benefit of this technique is that it can also account for timing offset errors in the relay
network between the relay and receiver. Suppose, for example, that the effects of multipath propagation
are negligible, and we can express the signal at the receiver as x1(t) = h1s(t), and the signal from the
relay as x2(t) = h2s(t − τ), where s(t) is a source of interference to be canceled, and τ is a timing
alignment error between the destination and decompressed relay signals. Furthermore, assume that the
s(t) is zero-mean white noise and the PSD is perfectly estimated. In this example, the interference
canceling filter will give
x(t+M) = x1(t)− h1h2x2(t+ τ) = 0, (5.9)
so the interference is perfectly canceled. Therefore, time-shifted correlated interference is also properly
dealt with. This was important in the SDR implementation because the time-shift error turned out to
be much more significant than multi-path effects due to the relatively close proximity of the USRPs and
lower bit rate.
5.4.3 Detection and Synchronization
The interference-canceled, univariate signal x(t) described in Section 5.4.2 is used for detection with a
signal sent from the transmitter, and also frequency and timing synchronization. After the timing offset
has been calculated the OFDM samples can be taken for each subcarrier.
It is sufficient to use standard SISO detection and synchronization routines at this point on the signal
x(t), assuming a single transmit antenna at the transmitter. These routines have already been discussed
in Section 2.4.
After detection and synchronization, we are provided with a timing value for the start of the packet
t0, and a carrier frequency offset ω. At this point, there is no further use for the interference-cancelled
series x(t). We calculate the timing offset for the original series: t0 = t0 +M (see Section 5.4.2), apply
the frequency correction, and then apply an IFFT to recover the samples on each subcarrier. The jth
sample on subcarrier k is given by
xk(j) =
N−1∑
n=0
e2πikn/Nx′((N + C)j − t0 + n). (5.10)

Chapter 5. Design of the Compress-Forward Relay Network 53
where
x′(t) = e−2πiωtx(t) (5.11)
is the CFO-corrected signal.
The OFDM samples xk(j) are then passed over for equalization.
5.4.4 Equalization
The purpose of equalization is to first estimate the channel parameters from the pilot signal for each
OFDM subcarrier, and to then use these values to combine the multiple-output OFDM samples across
each subcarrier for decoding. The initial channel estimates h(f) are calculated for each subcarrier as
in [25] using the pilot signal.
We can now apply MMSE equalization to the signal xk(i) to recover the transmitted signal sk(i)
using the channel estimates and the interference plus noise covariance estimate:
sk(i) = hTk (hkhTk + Σk)
−1xk(i). (5.12)
5.4.5 Channel Decoding
With the estimates of the transmitted signal sk(i), it is now possible to decode the transmitted message.
This process should of course inverse the encoding step performed at the encoder. A SISO decoding
routine can be applied to sk(i) at this point. There may also be additional information within the packet
apart from the payload that will need to be managed, such as MAC related data, packet sequence index
etc. However, this is not within the scope of this thesis.

Chapter 6
Experimental Results
This chapter outlines the experimental methodology and results from the compress-forward relay imple-
mentation based on the design criteria from the previous chapter. The main objective is to show that
compress-forward relaying can improve data rates under the presence of interference.
The chapter is outlined as follows. Some of the development details in working with the USRPs and
the associated software is presented in Section 6.1. The configuration of the testbed and its physical
layout is presented in Section 6.2. In addition to the cooperative relaying experiment, a few additional
side-experiments were conducted to validate some of the theoretical assumptions about the RF environ-
ment. The interference-as-noise model is explored in Section 6.3, and validation of the synchronization
assumptions is explored in Section 6.4. Details of a point-to-point communication experiment is con-
ducted without interference are provided in Section 6.5, and finally results for cooperative relaying with
interference are presented in Section 6.6.
6.1 Development Details
This section outlines some of the issues that were encountered while developing the software used for
conducting the experiments. The design was implementation using GNURadio, and some of USRP
specific code used the UHD library provided by Ettus Research for configuring the USRPs. Some of
the required functionality was already present in GNURadio. This includes the transmitter and receiver
functionality for handling OFDM packets such as encoding the data onto a packet, detection of the
packet, and decoding.
The relay design requires simultaneously receiving IQ data from the USRP and sending IQ data to
the USRP for transmission. The timing difference between receiving and sending data needs to be fixed
in order for the receiver USRP to properly align the relay’s data in time with its own received signal as
discussed in Section 5.2.
This functionality did not exist in GNURadio so a program was written which could interface with
GNURadio to provide this functionality as well as some other important features. This program can
be invoked from the command-line and is called usrp_server. When usrp_server is invoked from
the command-line, it connects to a USRP and configures its settings such as transmission gain, which
antennas to use, the carrier frequency, and sample rate. It can also connect to multiple USRPs if they
are synchronized with a MIMO expansion cable or Octoclock, meaning they share the same PPS clock
54

Chapter 6. Experimental Results 55
signal and a REF signal for coherent modulation. The USRP can be configured either for transmission,
reception, or both. This configuration is specified based on the command-line arguments passed to
usrp_server.
After the USRP is configured, other programs, including GNURadio, can connect to usrp_server
to send and receive IQ samples. There are a few options in terms of how this connection between
usrp_server and GNURadio is made. The connection can be made using interprocess communication
(IPC) tools plike UNIX domain sockets or named pipes, or the connection can be made from a remote
machine using a TCP connection.
Once the connection is made with a client usrp_server, starts streaming samples from the USRP
and sends them to the client. The client also sends sampled to usrp_server for transmission. The
reception and transmission streaming is synchronized within usrp_server so that there is a fixed timing
offset between the first received sample and the first transmitted sample. This is crucial for the relay
implementation. This timing offset can be specified when usrp_server is invoked and should be large
enough so that the transmitted samples are ready on time.
Here is an example of how usrp_server may be invoked from the command-line:
usrp_server --rx-chans=0,1 --tx-chans=0 \
--rate=1.0e6 --freq=4.2e9 --delay=1e5 --soc-path=usrp.soc
This configures the USRP to use two receive antennas (indexed 0 and 1), and a single transmit antenna
(index 0), operate at a rate of 1 million samples per second, use a carrier frequency of 4.2 GHz, delays
transmission by 105 samples (or 0.1 seconds), and create a UNIX domain socket at the path usrp.soc
which can be connected to from GNURadio.
The other functionality outlined in Chapter 5 was implemented in GNURadio. It was necessary to
implement new processing blocks in GNURadio for the relay and destination. These blocks were written
in C++, which interfaces with GNURadio.
6.2 Testbed Setup
The experiments were conducted using the three B210 USRPs and one N210 connected to separate
laptops for processing. The B210 USRPs were connected to the laptops via the USB-3.0 ports, which
provided a higher data transfer rate than the USB-2.0 ports.
One of the B210s played the role of the source transmitter, and the N210 played the role of the
interference. These two USRPs were placed in the same room. The other two B210s played the role
of the destination and relay. They were placed in an adjacent room to the transmitter and source of
interference.
The source of interference and the transmitter USRPs were roughly colocated in the first room, while
the relay and destination USRPs were placed so that an equilateral triangle of roughly 5 meters was
formed between the transmitter/interference pair in the first room, the relay, and the destination. This
setup was done so that the signal strength between all the transmitting and receiving USRP pairs would
be roughly the same (the relay being capable of both transmitting and receiving).
The two receive antennas of the destination and relay were both 45° from the vertical, and 90°from each other. The two transmit antennas for the source transmitter and interference were angled
horizontally and vertically, respectively.

Chapter 6. Experimental Results 56
6.3 Interference Analysis Experiment
A few side experiments were also conducted to validate certain theoretical assumptions made about the
network. The first of these experiments is to validate the interference-as-noise assumption. Specifically,
suppose a source of interference has Ni antennas, and a receiver has Nr > Ni antennas. The receiver does
not synchronize with the interference source. If the receiver is to treat the interference as noise, then the
distribution of the interference should be roughly Gaussian and the majority of the received interference
power should lie within a Ni dimensional subspace, and its Nr−Ni dimensional nullspace should be free
of interference. If in practice the interference does not lie in this subspace, then interference mitigation
with receiver beamforming will be limited in its viability.
In this section, the interference-as-noise model is examined with an experimental setup. It was
assumed during analysis of the relay network that the interference was uncorrelated through time and
across OFDM subcarriers. It was also assumed that the rank of the interference covariance matrix
(across all receiver and relay antennas) was equal to number of dominant interference antennas in the
network.
An experiment was conducted to validate these assumptions. A network was setup with a single
transmitter and receiver with the transmitter sending a constant stream of packets. The transmitter has
one transmit antenna and the receiver has two receive antennas. The receiver uses the PSD estimation
algorithm from Section 5.4.1 to calculate the PSD and the interference-nulling filter from Section 5.4.2
was also applied. As mentioned in Section 5.4.2, the filter design involves an eigen decomposition of the
covariance matrices at each subcarrier frequency. The ratio between the largest and smallest eigenvalues
were collected and analyzed to determine the proportion of interference energy that was rejected by
the filter, and how much of the energy falls along a single dimensional subspace. The experiment
results concluded that the ratio was typically between 80 and 110 (or 19 dB and 20 dB). In practice, this
reduction in power was deems sufficient for transmission in the presence of interference.
6.4 Local Oscillator Experiment
Another assumption to validate is the CFO relationship during transmission and reception under a
shared local oscillator, as presented in Chapter 4. Under the compress-forward relaying, the CFO used
in the out-of-band link can be used for synchronizing the received signal on the primary band with the
compressed signal from the relay, as discussed in Section 4.2. This is reliant on the fact that the CFO
on the compressed signal at the relay matches the CFO on the transmitted signal from the relay. As
mentioned in Section 4.1, this assumption was validated in a wireless SDR testbed in [14]. As a part of
this thesis, a similar experiment was undertaken using USRPs to validate the CFO assumptions.
A simple setup with two USRPs was used where one USRP acted as the transmitter, and the other
as a receiver. The transmitter was configured to transmit a constant value 1 for 10 seconds, while the
receiver used a phase-locked loop (PLL) for estimation of the received frequency. The output of the PLL
is an estimation of the CFO between the two USRPs. The transmitter and receiver nodes then changed
roles and the CFO was again estimated using a PLL.
The resulting CFO had minor fluctuations but tended to lie around −255.3 Hz for the first case, and
255.3 Hz when the roles of the USRPs was reversed. This confirms the CFO assumptions.

Chapter 6. Experimental Results 57
5 5.2 5.4 5.6 5.8 6 6.2 6.4 6.6 6.8 7 7.2 7.4
10−5
10−4
10−3
10−2
10−1
SNR (dB)
BER
Bit Error Rate for Point-to-Point Transmission
QPSK 1QPSK 216-QAM 116-QAM 2
QPSK theory
Figure 6.1: BER under the point-to-point test for different modulation schemes for the two receivers.The red and blue lines are associated with receiver 1 and 2, respectively.
6.5 Baseline Transmission Experiment
As a baseline case for OFDM transmission, the performance of a point-to-point network without in-
terference was analyzed. The transmission power was adjusted to control the SNR and the achieved
BER was compared to theoretical values. The SNR was adjusted at the transmitter by changing the
transmission gain.
In this experiment, the results were collected from two receiving USRPs, as described in Section 6.2.
The reason for doing so was to also see how the channel impacted the received signal between the two
receivers. It was anticipated that they would roughly have the same received gain, so their BER curves
should be roughly the same as the transmitter gain was varied.
The transmitter sent packets in the form as described in Section 5.1, and a standard OFDM receiver
was used. There were two modulation schemes used for encoding the payload: QPSK and 16-QAM.
The results of the experiment are shown in Figure 6.1. Under QPSK, the gap is largest from the
theoretical bounds in the low SNR regime. The reason for this appeared to be because as the SNR
decreased, estimation performance of the synchronization and equalization parameters from the pilot
signal was reduced, which would further reduce the BER. The 16-QAM performance was lower than the
QPSK performance, as expected. The BER under 16-QAM is not suitable for practical purposes under
the setup. The transmit power on the USB-powered B210s was at its maximum at the right-hand side
of the figure, and could not be made higher. It was possible to increase the BER under 16-QAM by
reconfiguring the setup, but these results are omitted because 16-QAM was still not found to be viable
in the cooperative relay setup, as will be discussed in Section 6.6.

Chapter 6. Experimental Results 58
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4
10−3
10−2
10−1
Interference Gain (dB)
BER
Bit Error Rate under Cooperative Relaying with Interference
QPSK 1QPSK 2
CF combined (QPSK)
Figure 6.2: BER with a single source of interference. The red and blue lines show the BER with separatedecoding at the relay and destination, respectively. The black line shows the BER with cooperativerelay decoding at the destination. Receiver 1 is the destination (associated with the plot QPSK 1), andreceiver 2 is the relay.
6.6 Cooperative Relaying with Interference Experiment
Finally, the relay network model with interference is studied. This involves a transmitter with fixed
transmit power and a source of interference with variable transmit power. The relay and destination
nodes cooperate to mitigate the correlated interference. The scheme follows the description outlined in
Chapter 5. The USRPs are set up as outlined in Section 6.2.
In this experiment, the source transmitter was set to maximum power. From the previous experiment,
this translates to an SNR of 7.5 dB. The source of interference was introduced and its transmit power was
varied for each trial, starting with a baseline of 0 dB, and going up to 2.5 dB. The relay and destination
were both active. As a baseline, the relay and destination attempted to separately decode the packets
without cooperation. It was anticipated that the BER in this case would decrease as the transmit
power of the interference increased. The relay also sent its compressed signal to the destination, where
the destination combined the signals to mitigate the interference. In this case, it would be anticipated
that most of the interference would be mitigated based on the results of the previous experiment on
interference analysis presented in Section 6.3, and there would therefore be negligible change in BER as
the interference power increased.
The results of the analysis are presented in Figure 6.2. The first thing to note is that with low
interference power, there is a significant gap in the BER between the relay and destination with separate
decoding. At 0 dB, the destination is still able to reliably decode with a BER of roughly 10−4, while the
relay has a much higher BER of roughly 1.1 × 10−2. The reason for this was because of the difference
in gain from the source and interference at the relay and destination due to the random nature of the

Chapter 6. Experimental Results 59
RF environment. As the gain was increased at the interference, the BER for the destination quickly
rose. Considering the fact that the BER gap between the two receivers was much lower in the previous
experiment, one can conclude that the introduction of interference makes the RF environment much
more variable. Intuitively, this is because there is now a random component to the noise (due to the
interference). Without interference, the noise power is less variable.
With cooperation, the destination was able to successfully mitigate the interference. From the figure,
it can be seen that the BER is roughly constant. From the figure it is also clear that cooperation does
not necessarily lead to a reduction in BER, as the BER with interference gain of 0.5 dB was higher
without cooperation for the destination. The reason for this is because the BER under the relay is
already low, so it can not be very beneficial to the destination, which already has a low BER before
combining. Introduction of the relay’s compressed signal leads to a degradation when the synchronization
and channel parameters are not estimated accurately.
The cooperative BER dropped between interference gain of 1.0 dB and 1.5 dB. There are two possible
explanations: the first is that the higher interference lead to a better interference-canceling filter, so the
estimation of the synchronization and channel parameters was more accurate. The second explanation
is that the drop is within the error margins for the BER calculation, since the BER is more dynamic
with the introduction of interference (i.e. instead of being i.i.d., the bit errors occur in bursts with
interference).

Chapter 7
Summary and Conclusions
This thesis explored the theory and implementation of a cooperative relay network.
The theoretical results were covered in Chapter 3. These results were presented in the context of a
relay network experiencing correlated at the relay and destination with an orthogonal out-of-band link
between the relay and destination. For compress-forward relaying, the benefit of Wyner-Ziv coding was
analyzed. An interpretation was given that omitting Wyner-Ziv coding leads to a loss of a constant
number of bits in the out-of-band link which depends only on the correlation between the signal at
the destination and relay. Amplify-forward relaying was shown to yield the same achievable rate as
compress-forward without Wyner-Ziv coding. It was also shown that amplify-forward could be modified
by subtracting the correlated portion of the signal at the relay before amplification in order to achieve
the same set of rates as compress-forward. This scheme could be of practical interest because it omits
channel coding between the relay and destination, and it less reliant on feedback from the destination
to relay.
A simulation of a cooperative relay network was also presented in Chapter 3. It was shown that
cooperative relaying can be beneficial for cell-edge users, but performance is linked to the number of
antennas at the relay. With multiple antennas present at the relay, it is essential that the quantization
covariance is optimally shaped otherwise the additional antennas do not improve performance.
The problem of synchronization in a cooperative relay network was presented in Chapter 4. Prior
results based on an amplify-forward setup were used as a reference to provide similar synchronization
results for compress-forward; with and without Wyner-Ziv coding. The synchronization strategy required
that the same local oscillator was used at the relay for reception and transmission.
An implementation was outlined in Chapter 5 for a compress-forward relay network that could
mitigate correlated interference. A standard point-to-point OFDM strategy was used as the starting
point and the changes to the design were considered as two separate components. The first component
involved the compression and forwarding of the relay’s signal to the destination, and the decoder at the
destination for recovery of the signal and synchronization with its own signal. The second component of
the implementation was the interference mitigation at the destination. This involved estimation of the
interference power spectrum prior to decoding, and design of a filter for rejecting interference.
The experimental results were presented in Chapter 6. Before testing the cooperative relay network,
some initial testing was done to validate the theoretical assumptions made about the network. The
cooperative relaying results showed that the interference could successfully be nulled at the destination,
60

Chapter 7. Summary and Conclusions 61
and the BER remained roughly constant as the interference power increased, which was expected. It
was observed that the RF environment with interference was much more random than without (Sec-
tion 6.6). This suggests that cooperative relays should operate opportunistically, based on observed
channel conditions.
There is room for further work in the implementation. Performance under 16-QAM was lower than
expected, and this could be improved upon. Specifically, testing the setup with the X-300 USRPs
would potentially be promising because of their higher transmission power, allowing for higher SNRs,
and more stable LOs, which would lead to a lower CFO. The quantization of the signal at the relay
could also be significantly improved to make better use of the out-of-band link. Feedback between
the relay and destination could permit multiple antennas at the relay with an optimized quantization
covariance matrix. The redundancy between the relay and destination’s signal could also be exploited. If
these improvements were implemented, one could also consider the replacement of the compress-forward
strategy with the hybrid amplify-forward compress-forward scheme from Chapter 5.

Appendices
62

Appendix A
Achievable Rate for HCAF
To analyze the achievable rate with HCAF, I will first outline its codebook construction in more detail.
A pdf p(x)p(u|yr) is fixed and is used to generate 2nR i.i.d. codewords according to p(x) which form the
source codebook C. 2nR′
i.i.d. codewords are generated according to p(u) to form the relay quantization
codebook Cr. C is revealed to the source and destination, and Cr is revealed to the relay and destination.
To send a message m, the source picks the codeword xn(m) ∈ C and sends it over the channel over
a block length of n. After the relay receives the signal ynr , it picks a codeword un(l) ∈ Cr such that ynr
and un(l) are jointly typical. By the Covering Lemma, such a codeword will exist with high probability
as n → ∞ if R′ > I(Yr;U). The relay then transmits the signal xnr = u(l)n − EYr [Un|Y nr = ynr ] over
the out-of-band relay-destination link. Note that if U takes the distributional form U = Yr + Q, then
Xr = Q. Also note that in the Gaussian case, Yr and Xr are independent because they are linearly
uncorrelated.
After the destination receives the signal ynd from the transmitter and ynrd from the relay, it picks
a codeword un(l) ∈ Cr such that un(l), ynd , and ynrd are jointly typical. By the Conditional Typical-
ity Lemma and the Packing Lemma, such a codeword will exist and un(l) will equal un(l) with high
probability as n→∞ if R′ < I(U ;Yd, Yrd).
After recovery of the quantization sequence, the destination recovers the source message by finding
a xn(m) ∈ C such that xn(m), un(l), ynrd, and ynd are jointly typical. By the joint typicality lemma and
packing lemma, such a codeword will exist and xn(m) will equal xn(m) as n→∞ if R < I(X;U, Yrd, Yd).
To summarize the results so far, a rate R is achievable if
R < I(X;U, Yrd, Yd) (A.1)
for a distribution p(x)p(u|yr) given that
I(U ;Yr) < I(U ;Yd, Yrd). (A.2)
63

Appendix A. Achievable Rate for HCAF 64
I will continue by re-expressing the constraint (A.2). Consider the following:
I(Yr;U, Yrd, Yd) = I(Yr;U) + I(Yr;Yrd, Yd|U) (A.3)
< I(Yd, Yrd;U) + I(Yr;Yrd, Yd|U) (A.4)
= I(Yr, U ;Yrd, Yd) (A.5)
= I(Yr, U ;Yrd) + I(Yr, U ;Yd|Yrd) (A.6)
= I(Xr;Yrd) + I(Yr, U, Yrd;Yd)− I(Yrd;Yd) (A.7)
= I(Xr;Yrd) + I(Yr;Yd) (A.8)
where (A.4) follows by the constraint (A.2), (A.7) follows because Xr is a function of U and Yr, and
(U, Yr)→ Xr → Yrd forms a Markov chain so I(Yr, U ;Yrd) = I(Xr;Yrd), and (A.8) follows because Yd →Yr → (U, Yrd) forms a Markov chain so I(Yr, U, Yrd;Yd) = I(Yr;Yd), and because Yd → Yr → Xr → Yrd
forms a Markov chain and Yr and Xr are independent (assuming Yr and U are jointly Gaussian) so
I(Yrd;Yd) = 0. This can be rearranged so that the constraint (A.2) can be alternatively expressed as
I(Yr;U, Yrd|Yd) < I(Xr;Yrd). (A.9)
Notice that this constraint is similar to the CF-WZ constraint, but with the pair (U, Yrd) taking the
place of the compressed signal Yr, and I(Xr;Yrd) taking the place of the out-of-band link capacity. If
the distribution of Xr matches the maximizing distribution of the out-of-band link, then I(Xr;Yrd)
will equal the out-of-band capacity C. For a Gaussian network, this will hold if Yr and U are jointly
Gaussian, as this implies Xr is also Gaussian. We can see another similarity for the rate constraint
R < I(X;U, Yrd, Yd), where again (U, Yrd) takes the place of Yr from the corresponding CF-WZ expres-
sion. Following similar arguments as made previously for the compress-forward relay, one can derive an
equivalent rate bound to (3.10) as
R < I(X;Yd) + I(Xr;Yrd)− I(Yr;U, Yrd|Yd, X). (A.10)
This bound on R can only be approached when the bound in (A.9) is closed. Consider now the last term
on the right hand side for the Gaussian network:
I(Yr;U, Yrd|Yd, X) = I(Yr;Yr +Q,Q+Nrd|Yd, X) (A.11)
= I(Yr;Yr +Q,Yr −Nrd|Yd, X) (A.12)
= I(Nr;Nr +Q,Nr −Nrd|Nd) (A.13)
= log2
(1 +
(1
σ2Q
+1
σ2Nrd
)σ2Nr|Nd
)(A.14)
The expression 1/σ2Q + 1/σ2
Nrdcan be solved by expanding (A.9):
C = I(Xr;Yrd) > I(Yr;U, Yrd|Yd) (A.15)
= log2
(1 +
(1
σ2Q
+1
σ2Nrd
)σ2Yr|Yd
). (A.16)

Appendix A. Achievable Rate for HCAF 65
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
2
4
6
8
10
I(Yr;Yd) (bits/symbol)
bits/symbol
Signal Fidelity of Reconstructed Yr
I(Xr;Yrd)
I(Yr;U, Yrd)
I(Yr;U)I(Xr;Yrd)−1I(Xr;Yrd)
I(Yr;Yd) + 1
Figure A.1: Reconstruction fidelity of Yr as a function of correlation between Yr and Yd, measured byI(Yr;Yd).
Solving for 1/σ2Q + 1/σ2
Nrdand substitution into (A.14) gives
I(Yr;U, Yrd|Yd, X) = log2
(1 +
σ2Nr|Ndσ2Yr|Yd
(2C − 1)
)(A.17)
which is equal to the corresponding term (3.13) derived for CF-WZ. Substitution into (A.10) leads to
the same rate bounds as for CF-WZ. Therefore, we can conclude that HCAF achieves the same set of
rates as CF-WZ in a Gaussian relay network.
We can also solve for the quantization noise variance σ2Q to get
σ2Q >
σ2Yr|Yd
1− 2−C. (A.18)
It is worth mentioning that for C > 1, the denominator quickly approaches 1, and σ2Q ≈ σ2
Yr|Yd . In
other words, the rate of the quantizer becomes independent of the out-of-band link, and only depends
on the correlation between Yr and Yd. A stronger out-of-band link improves the SNR of the forwarded
quantization noise, which improves the estimate of Yr at the destination.
Figure A.1 shows the mutual information between the relay signal and the reconstruction at the
destination I(Yr;U, Yrd) as a function of I(Yr;Yd). This quantity will equal the quantity I(Yr; Yr) under
CF-WZ. For CF-WZ, this quantity indicates the rate of the quantizer. In the case of the HCAF scheme,
the quantizer rate R′ is indicated by I(Yr;U); which is clearly much lower. When Yr and Yd are
uncorrelated (I(Yr, Yd) = 0), and C > 1, then R′ ≈ 1. The quantity I(Xr;Yrd) measured the capacity of
the out-of-band link and the reconstruction quality at the destination I(Yr; Yr) for the case of AF and

Appendix A. Achievable Rate for HCAF 66
CF-WZ relaying.
HCAF demonstrates that a modified amplify-forward relaying scheme can achieve the same set of
rates as CF-WZ. However, HCAF also has a few benefits over CF-WZ. First, the achievable rate is
insensitive to a lack of CSI information on relay-destination link at the relay. This is because the
quantization rate is dominated by the correlation between Yr and Yd, not the out-of-band capacity,
as mentioned above. Therefore, HCAF could be efficiently implemented without feedback from the
destination to relay. Secondly, HCAF may be easier to implement in practice because it does not involve
digital channel coding as in CF-WZ. The relay implementation would be easier because it just has to
quantize its received signal, instead of quantization, calculation of the bin index, and transmission of the
bin index as in CF-WZ. HCAF would also be a good choice in a scenario where a single relay is used to
simultaneously assist multiple users by broadcasting its message over the relay-destination link. HCAF
would perform well because the rate would be less limited by the weakest out-of-band link capacity
among all the users as in CF-WZ.
To the best of my knowledge, this relaying scheme has not been suggested in the published literature;
however, there have been a number of suggested schemes that are hybrid-digital-analog (HDA), as in
the case of HCAF. The primary advantage of HDA coding schemes is that they increase robustness
to channel mismatch in the absence of CSI. In [30], HDA cooperative relaying is considered when CSI
information in not available at the relay, and the channels are subject to random fading. Four HDA
schemes were considered that combined amplify-forward and compress-forward. The schemes involved
splitting the relays transmit signal into a digital and analog part. The digital part is constructed via
compress-forward, and the analog part is made with amplify-forward. The CF part is decoded first, and
then the analog part (which is a function of the quantization noise) is added back to it. In the HCAF
scheme suggested here however, there is only an analog part to the signal.

Bibliography
[1] M. H. A. Khan, J.-G. Chung, and M. H. Lee, “Downlink performance of cell edge using coop-
erative bs for multicell cellular network,” EURASIP Journal on Wireless Communications and
Networking, vol. 2016, no. 1, p. 56, 2016.
[2] G. Kramer, M. Gastpar, and P. Gupta, “Cooperative strategies and capacity theorems for relay
networks,” IEEE Transactions on Information Theory, vol. 51, no. 9, pp. 3037–3063, 2005.
[3] A. El Gamal and Y.-H. Kim, Network Information Theory. Cambridge University Press, 2011.
[4] N. I. Miridakis and D. D. Vergados, “A survey on the successive interference cancellation perfor-
mance for single-antenna and multiple-antenna OFDM systems,” IEEE Communications Surveys
& Tutorials, vol. 15, no. 1, pp. 312–335, 2013.
[5] M. Costa, “Writing on dirty paper (corresp.),” IEEE Transactions on Information Theory, vol. 29,
no. 3, pp. 439–441, 1983.
[6] T. C.-Y. Ng and W. Yu, “Joint optimization of relay strategies and resource allocations in co-
operative cellular networks,” IEEE Journal on Selected areas in Communications, vol. 25, no. 2,
2007.
[7] J. Huang, Z. Han, M. Chiang, and H. V. Poor, “Auction-based resource allocation for cooperative
communications,” IEEE Journal on Selected Areas in Communications, vol. 26, no. 7, 2008.
[8] A. Wyner and J. Ziv, “The rate-distortion function for source coding with side information at the
decoder,” IEEE Transactions on information Theory, vol. 22, no. 1, pp. 1–10, 1976.
[9] M. Haenggi, Stochastic geometry for wireless networks. Cambridge University Press, 2012.
[10] M. Haenggi, J. G. Andrews, F. Baccelli, O. Dousse, and M. Franceschetti, “Stochastic geometry
and random graphs for the analysis and design of wireless networks,” IEEE Journal on Selected
Areas in Communications, vol. 27, no. 7, 2009.
[11] N. Deng, S. Zhang, W. Zhou, and J. Zhu, “A stochastic geometry approach to energy efficiency
in relay-assisted cellular networks,” in Global Communications Conference (GLOBECOM), 2012
IEEE, IEEE, 2012, pp. 3484–3489.
[12] A. Marwanto, M. A. Sarijari, N. Fisal, S. K. S. Yusof, and R. A. Rashid, “Experimental study
of OFDM implementation utilizing GNU Radio and USRP-SDR,” in Communications (MICC),
2009 IEEE 9th Malaysia International Conference on, IEEE, 2009, pp. 132–135.
[13] D. C. Tucker and G. A. Tagliarini, “Prototyping with GNU Radio and the USRP-where to begin,”
in Southeastcon, 2009. SOUTHEASTCON’09. IEEE, IEEE, 2009, pp. 50–54.
67

BIBLIOGRAPHY 68
[14] P. Murphy, A. Sabharwal, and B. Aazhang, “On building a cooperative communication system:
Testbed implementation and first results,” EURASIP Journal on Wireless Communications and
Networking, vol. 2009, p. 7, 2009.
[15] P. Murphy and A. Sabharwal, “Design, implementation, and characterization of a cooperative
communications system,” IEEE Transactions on Vehicular Technology, vol. 60, no. 6, pp. 2534–
2544, 2011.
[16] Q. Zhang, J. Jia, and J. Zhang, “Cooperative relay to improve diversity in cognitive radio net-
works,” IEEE Communications Magazine, vol. 47, no. 2, pp. 111–117, 2009.
[17] S. S. Pradhan and K. Ramchandran, “Distributed source coding using syndromes (DISCUS):
Design and construction,” IEEE Transactions on Information Theory, vol. 49, no. 3, pp. 626–643,
2003.
[18] T. R. Fischer, “Trellis coded quantization,” in Speech Coding Proceedings, 1999 IEEE Workshop
on, IEEE, 1999, pp. 70–71.
[19] A. Heidarzadeh and F. Lahouti, “On robust syndrome-based distributed source coding over noisy
channels using LDPC codes,” Proc. of IEEE ICSPC, 2007.
[20] A. E. Gamal and Y. Kim, “Lecture notes on network information theory,” CoRR, vol. abs/1001.3404,
2010.
[21] X. Wu and L.-L. Xie, “On the optimal compressions in the compress-and-forward relay schemes,”
IEEE Transactions on Information Theory, vol. 59, no. 5, pp. 2613–2628, 2013.
[22] S. A. Ayoughi and W. Yu, “Optimized MIMO transmission and compression for interference mit-
igation with cooperative relay,” in Communications (ICC), 2015 IEEE International Conference
on, IEEE, 2015, pp. 4321–4326.
[23] P. Handel and P. Zetterberg, “Investigating the USRP: I/Q imbalance,” Mar. 2019.
[24] T. Pollet, M. Van Bladel, and M. Moeneclaey, “BER sensitivity of OFDM systems to carrier fre-
quency offset and wiener phase noise,” IEEE Transactions on Communications, vol. 43, no. 2/3/4,
pp. 191–193, 1995.
[25] T. M. Schmidl and D. C. Cox, “Robust frequency and timing synchronization for OFDM,” IEEE
Transactions on Communications, vol. 45, no. 12, pp. 1613–1621, Dec. 1997, issn: 0090-6778.
[26] P. Welch, “The use of fast fourier transform for the estimation of power spectra: A method based
on time averaging over short, modified periodograms,” IEEE Transactions on Audio and Electroa-
coustics, vol. 15, no. 2, pp. 70–73, 1967.
[27] R. B. Blackman and J. W. Tukey, “The measurement of power spectra from the point of view of
communications engineering-Part I,” Bell System Technical Journal, vol. 37, no. 1, pp. 185–282,
1958.
[28] R. Killick, P. Fearnhead, and I. A. Eckley, “Optimal detection of changepoints with a linear
computational cost,” Journal of the American Statistical Association, vol. 107, no. 500, pp. 1590–
1598, 2012.
[29] T. Anderson, An Introduction to Multivariate Statistical Analysis, ser. Wiley Series in Probability
and Statistics. Wiley, 2003, isbn: 9780471360919.

BIBLIOGRAPHY 69
[30] S. Yao and M. Skoglund, “Hybrid digital-analog relaying for cooperative transmission over slow
fading channels,” IEEE Transactions on Information Theory, vol. 55, no. 3, pp. 944–951, 2009.