Embed Size (px)
Citation preview

MEKATRONIKA
Jurusan Sistem Komputer Fakultas Ilmu Komputer
UNIVERSITAS GUNADARMA
2011
Disusun Oleh :
Dr. Lussiana ETP, Ssi., MT.
Hustinawati, SKom., MMSI.
Atit Pertiwi Skom., MMSI.
Ary Bima Kurniawan, ST., MT.
Yogi Permadi, SKom.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 1
BAB I
Pengenalan Mekatronika POKOK BAHASAN:
1. Pendahuluan 2. Pengertian Mekatronika 3. Aplikasi-Aplikasi Mekatronika
TUJUAN BELAJAR: Setelah mempelajari materi dalam bab ini, mahasiswa diharapkan mampu: Memahami tentang Mekatronika dan dapat menjelaskan contoh-contoh aplikasi yang termasuk mekatronika 1.1. Pendahuluan
Mekatronika adalah kata baru yang lahir di Jepang pada awal tahun 1970an yang merupakan gabungan antara 2 kata yaitu mechanics dan electroinics. Sekarang ini sering terlihat barang barang mekatronik seperti robot, mesin bubut NC, kamera digital, printer dan lain sebagainya. Persamaan dari barang-barang mekatronik ini adalah objek yang dikendalikan adalah gerakan mesin. Jika dibandingkan dengan gerakan mesin konvensional maka gerakan mesin tersebut lebih bersifat fleksibel dan lebih memiliki kecerdasan. Hal ini dimungkinkan karena memanfaatkan kemajuan iptek micro-electronics. Artinya dengan bantuan micro-electronics mesin dapat bergerak dengan lebih cerdas. Jika seseorang memberikan sebuah perintah, lalu semua dapat dipasrahkan ke mesih yang dapat bererak secara otomatis. Ini santat membantu menciptakan mesiha tau alat yang praktis dan mudah digunakan. Sehigga

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 2
sumber daya manusia seperti waktu dan otak dapat dipakai untuk pekerjaan yang lain, sehingga daapt menciptakan nilai tambah.
Pada awalnya mekatronik diarahkan pada 3 target yaitu: penghematan
energi (energi saving), pengecilan dimensi dan peringanan berat dan peningkatan kehandalan (reliability). Sekarang, setelah 30 tahun lebih berlalu dari kelahirannya, perlu dirumuskan kembali arah mekatronik sesuai dengan perkembangan jaman. Dan khususnya untuk Indonesia sebagai negara yang masih berkembang dengan segudang permasalahnnya, rasanya arah mekatronik perlu ditentukan agar dapat membantu memecahkan masalah-masalah yang ada dengan tetap memperhatikan lingkungan regional dan global.
1.2 Pengertian Mekatronika
Mekatronik adalah teknologi atau rekayasa yang menggabungkan teknologi tentang mesin, elektronika, dan informatika untuk merancang, memproduksi, mengoperasikan dan memelihara sistem untuk mencapai tujuan yang diamanatkan. Seperti diketahui dari definisi mekatronika adalah gabungan disiplin teknik mesin, teknik elektro, teknik informatika, dan teknik kendali. Pada awalnya, secara khusus tidak ada disiplin mekatronika. Untuk menggabungkan beberapa disiplin iptek tersebut, mekatronika memerlukan teori kendali dan teori sistem.
Secara sempit pengertian mekatronika mengarah pada teknologi kendali numerik yaitu teknologi mengendalikan mekanisme menggunakan aktuator untuk mencapi tujuan tertentu dengan memonitor informasi kondisi gerak mesin menggunakan sensor, dan memaukan informasi tersebut ke dalam mikro-prosesor. Ini menumbangkan kemajuan yang spektakuler jika dibandingkan dengan kontrol otomatis menggunakan instrumen analog, karena dapat merubah skenario kontrol secara fleksibel dan dapat memiliki fungsi pengambilan keputusan tingkat tinggi.
Contoh klasik barang mekatronik adalah lengan robot dan mesin bubut kontrol numerik. Barang-barang ini dapat melakukan pekerjaan-pekerjaan yang berbeda-beda dengan cara merubah program mereka sesuai kondisi yang diminta, karena telah ditambahkan kemampuan kendali aktif yang canggih terhadap mekanisme yang telah ada. Beberapa manfaat penerapan mekatronik adalah sebagai berikut:

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 3
1. Meningkatakan fleksibiltas Manfaat terbesar yang dapat diperoleh dari penerapan mekatronik adalah
meningkatkan fleksibilitas mesin dengan menambahkan fungsi-fungsi baru yang mayoritas merupakan kontribusi mikro-prosessor. Sebagai contoh, lengan robot industri dapat melakukan bebagai jenis pekerjaan dengan merubah program peranti lunak di mikro-processornya seperti halnya lengan manusia. Ini yuang menjadi faktor utama dimungkinkannya proses produksi produk yang beraneka ragam tipenya dengan jumlah yang sedikit-sedikit. 2. Meningkatakan Kehandalan
Pada mesin-mesin konvensional (manual) muncul berbagai masalah yang diakibatkan oleh berbagai jenis gesekan pada mekanisme yang digunakan seperti: keusangan, masalah sentuhan, getaran dan kebisingan. Pada penggunaan mesin mesin tersebut diperlukan sarana dan operator yang jumlahnya banyak untuk mencegah timbulanya masalah-masalah tersebut. Dengan menerapkan switch semikonduktor misalnya, maka masalah-masalah akibat sentuhan tersebut dapat diminimalkan sehingga meningkatkan kehandalan. Selain itu dengan menggunakan komponen-komponen mesin sebagai pengendali gerak, tingkat presisi dan kecepatan telah mencapai garis saturasi yang sulit untuk diangkat lagi. Dengan menerapkan kendali digital dan teknologi elektronika maka tingkat presisi mesin dan kecepatan gerak mesin dapat diangkat lebih tinggi lagi sampai batas tertentu. Batas ini misalnya adalah rigiditas mesin yang menghalangi kecepatan lebih tinggi karena munculnya getaran. Hal ini melahirkan tantangan baru yaitu menciptakan sistem mesin yang memiliki rigditas mesin yang menghalangi kecepatan lebih tinggi karena munculnya getaran. Hal ini melahirkan tatangan baru yaitu menciptakan sistem mesin yang memiliki rigiditas lebih tinggi.
Struktur mekatronika dapat dipilah menjadi 2 buah dunia yaitu dunia mekanika dan dunia elektronika. Di dunia mekanika terdapat mekansime mesin sebagai objek yang dikendalikan. Di dunia elektronika terdapat beberapa elemen mekatronika yaitu : sensor, kontroler, rangkaian pengerak aktuator dan sumber energi.
Elemen-elemen mekatronika dapat dijejalaskan sebagai berikut:

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 4
Mekanisme mesin. Ini adalah objek kendali yang bisa berupa lengan robor, mekanisme penggerak otomotif, generator pembangkit listrik dan lain sebagainya. Sensor. Ini adalah elemen yang bertugas memonitor keadaan objek yang dikendali. Sensor ini dilengkapi dengan rangkaian pengkondisi sinyal berfungsi memproses sinyal listrik menjadi sinyal yang mengandung informasi yang bisa dimanfaatkan. Kontroler. Ini adalah elemen yang mengambil keputusan apakah keadaan ojek kendali telah sesuai dengan nilai referensi yang diinginkan, dan kemudian memproses infromasi untuk menetapkan nilai komando guna merefisi keadaan objek kendali.
Rangkaian. Ini adalah elemen yang berfungsi menerima sinyal komando dari kontroler dan mengkonversinya menjadi energi yang mampu menggerakkan aktuator untuk melaksanakan komando dari kontroler. Elemen ini selain menerima informasi dari konroler juga menerima catu daya berenergi tinggi. Aktutor. Ini adalah elemen yang berfungsi mengkonversi energi dari energi listrik ke energi mekanik. Bentuk konkrit aktuator ini misalnya:motor listrik, tabung hidrolik, tabung penematik. Dan lain sebagainya. Sumber energi. Ini adalah elemen yang mencatu energi listrik ke semua element yang membutuhkannnya. Salah satu bentuk konkrit sumber energi adalah batere untuk sistem berpindah tempat, atau adaptor AC-DC untuk sistem yang stasionari(tetap di tempat).
Struktur mekatronik yang digambarkan disini dari segi teori kendali disebut sistem umpan balik (closed loop). Sistem umpan balik ini meyerupai makhluk hidup, dimana dalam melakukan kegiatan selalu merevisi tindakannya berdasarkan informasi umpan balik yang dikirim oleh indar ke otak. Dengan demikian mekatronik adalah merealisasikan sistem mekanik yang mampu melakukan pekerjaan seperti halnya seorang manusi yang memiliki kondisi yang sempurna.
Batas formal antara berbagai disiplin ilmu rekayasa (enggineering) saati ini semakin kabaru seiring dengan perkembangan teknologi IC (Integrated Circuit = rangkaian elektronika terpadu) dan komputer. Hal ini terutama terlihat jelas pada bidang mekanik dan elektronik yaitu semakin banyak produk yang merupakan integrasi dari kedua bidang tersebut, sehingga berkembang suatu bidang yang disebut mekatronika, yang merupakan perluasan cakupan dari bidang elektromekanik.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 5
Beberapa definisi dari yang diambil dari berbagai sumber diantaranya: “Integration of micropocessor control system, electrical systems and mechanical system” (Bolton, Mechtronics). The synergistic combination fo precision mechanical engineering, electronic control and systems thinking in the design of products and manufacturing processes”(Journal of Mechatornics). “The synergistic use of precision engineering, control and procesess (ME Magazine). “The interdisciplinary field of engineering dealing with the design of products whose function relies on the synergistic integration of mechanical and electronic components coordinated by a control architecture. “(A Iciatore, D.G. and Histand, M.B.)
Dari berbagai pengertian diatas maka dicoba disusun pengertian dari mekatronika yaitu integrasi dari sistem mekanik dan elektronik yang dikendalikan dengan komputer dan dimanfaatkan pada produk maupun proses produksi. Saat ini mekatronika sudah dianggap sebagai bidang tersendiri, meskipun tidak terlepas hubungannya dengan bidang lainnya.
1.3 Aplikasi Aplikasi Mekatronika Saat ini pengendalian sistem mekanik hampir seluruhnya dilakukan
menggunakan sistem kendali elektronik dan sebagian besar diantaranya menggunakan komputer. Contohnya adalah mesin mobil. Dahulu sistem pembakaran yang terjadi pada silinder dikendalikan sepenuhnya secara mekanis. Banyak bahan bakar dan udara diataur langsung dari pedal lewat perantraaan kabel dengan perbandingan yang telah dissetel sebelumnya. Katup terbuka dan tertutup diatur secara mekanik menggunkana camshaft tergantung posisi piston.
Saat ini banyak sekali sensor yang terlibat pada sistem pembakaran mobil yaitu di antaranya sensor kecepatan dan posisi poros engkol, sensor temperatur udara dan bahan bakar, dan sensor pada pedal gas. Semua informasi dari sensor tersebut diolah oleh sistem pengendali berupa komputer yang disebut Engine Control Unit untuk digunakan mengatur waktu dan besarnya bukaan katup serta perbandingan bahan bakar-udara yang dapat disesuaikan dengan kondisi mesin ataupun pengendara.
Pada mobil juga terdapat berbagai sistem lain yang saat ini menerapkan sistem mekatronika, yaitu sistem transmisi automatis, sistem suspensi aktif,

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 6
sistem anti-lock braking system(ABS), sistem pengkondisi udar, serta display kecepatan, putraran mesin dan level bahan bakar.
Selain kendaraaan bermotor, mekatronika juga diterapkan pada berbagai hal antra lain :
a. Perancancang sensor/transduser b. Peralatan rumah tangga dan perkantoran :mesin cuci, mesin isap
debut, timbangan digital, micarowave, remote control, pembuat kopi, sistem HVAC, kamera, mesin foto kopi dan masih banyak lagi
c. Berbagai peranti pada komputer : mouse, printer. Disk drive, CD ROM drive, keyboard.
d. Dunia penerbangan : pengendalian pesawat tebang secara Fly By Wire(FBW)
e. Peralatan medis dan laboratorium f. Bidang Industri : monitoring dan kendali berbagai peralatan industri g. Bidang robotika Komponen utama pada suatu sistem mekatronika adalah sensor, aktuator,
dan kontroler. Sensor digunakan untuk mendeteksi variabel pada sistem. Aktuator befungsi untuk memberikan aksi pada sistem yang dikendalikan.
1.4. Aspek Pengendalian Elektrik
Sistem Kendali mempunyai tiga unsur yaitu input, proses dan output.
Gambar 1.1. Unsur-unsur sistem kendali
Input pada umumnya berupa sinyal dari sebuth transduser, yaitu alat yang dapat merubah besaran fisik menjadi besaran listrik, misalnya tombol tekan, saklar batas, termostat, dan lain-lain. Transduser memberikan informasi mengenai besaran yang diukur, kemudian infomrasi ini diproses oleh bagian proses. Bagian proses dapat beruapa rangkaian kendali yang menggunakan
Input Output
Proses

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 7
peralatan yang dirangkai secara listrik, atau juga berupa suatu sistem kendali yang dapat diprogram mislanya sistem berbasis mikroprosesor, mikrokontroler atau PLC.
Pemrosesan informasi(sinyal input) menghasilkan sinyal Output yang selanjutnya digunakan untuk mengaktifkan aktuator (peralatan Output) yang dapat berupa motor listrik, kontaktor, katup selenoid, lampu dan sebagainya. Dengan peralatan output, besar listrik diubah kembali menjadi besar fisik.
Sistem Kendali dibedakan menjadi dua, yaitu sistem kendali loop terbukan dan sistem kendali loop tertutup.
1.4.1 Sistem Kendali Loop Terbuka
Sistem kendali loop terbuka adalah proses pengendali dimana variabel Input mempengaruhi output yang dihasilkan. Gambar 2 menunjukkan diagram blok sistem kendali loop terbuka.
Gambar 1.2. sistem kendali loop Terbuka
Dari gambar 3 diatas, dapat dipahami bahwa tidak ada informasi yang diberikan oleh peralatan output kepada bagian proses sehingga tidak diketahui apakah hasil output sesuai dengan yang dikehendaki.
1.4.2 Sistem Kendali Loop Tertutup Sistem Kendali loop tertutup adalah suatu proses pengendalian di mana
variabel yang dikendalikan (output) disensor secara kontinyu, kemduian dibandingkan dengan besaran acuan.
Variabel yang dikendalikan dapat berupa hasil pengukuran temperatur, kelembaban, posisi mekanik, kecepatan putaran, dan sebagainya. Hasil pengukuran tersebut diumpan-balikkan ke pembanding (komparator) yang dapat berupa peralatan mekanik, listrik, elektronik atau peneumatik. Pemanding membandingkan sinyal sensor yang berasal dari variabel yang
Gangguan
Setting Output Peralatan Kendali
Sistem yang dikendalikan

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 8
dikendalikan dengan besaran acuan, dan hasilnya beruapa sinyal kesalahan. Selanjutnya, sinyal kesalahan diumpankan kepada peralatan kendali dan diproses untuk memperbaiki kesalahan sehingga menghasilkan output sesuai dengan yang dikehendaki. Dengan kata lain, kesalahan sama dengan nol.
Gambar 1.3. sistem kendali loop Tertutup
1.5. Peran Teknologi Digital dalam Pengendalian
Perkembangan Teknologi rangkaian terintegrasi khususnya sistem mikroprosesor memberikan kontribusi yang signifikan terhadap bidang kendali digital Teknologi mikroprosesor telah banyak diterapkan untuk pengendalian berbagai peralatan baik industri hingga rumah tangga. Kehadiran mikrokontroler menjadi penerapan pengendali digital relatif mudah diterapkan pada berbagai aplikasi yang portabel.
Hingga akhir tahun 1970, sistem otomasi mesin dikendalikan oleh rali elektromagnet. Dengan semakin meningkatnya perkembangan teknologi, tugas-tugas pengendalian dibuat dalam bentuk pengendalian terprogram yang
Gangguan
Error
Setting Output
Umpan Balik
Peralatan Sistem yang dikendalikan (Proses)
Senso

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 9
dapat dilakukan antara lain menggunakan PLC(Programmable Logic Controller). Dengan PLC, sinyal dari berbagai peralatan luar diinterfis sehingga fleksibel dalam mewujudkan sistem kendali. Disamping itu, kemampuannya dalam komunikasi jaringan memungkinkan penerapan yang luas dalam berbagai operasi pengendalian sistem.
Dalam sistem otomasi, PLC merupakan ‘Jantung’ ssitem kendali. Dengan program yang disimpan dalam memori PLC, dalam ekskusinya, PLC dapat memonitor keadaan sistem melalui sinyal dari peralatan input, kemudian didasarkan atas logika program menentukan rangkaian untuk pengendalian peralatan output luar.
PLC dapat digunakan untuk mengendalikan tugas tugas sederhana yang berulang-ulang, atau di-interkoneksi dengan yang lain menggunakan komputer melalui sejenis jaringan komunikasi untuk mengintegrasikan pengendalian proses yang kompleks.
Cara Kerja sistem kendali PLC dapat dipahami dengan diagram blik seperti ditunjukan pada Gambar 1.4.
Gambar 1.4. Diagram Blok PLC
1.6. Aspek Mekanika
Otomotif adalah ilmu yang mempelajari tentang alat-alat transportasi darat yang menggunakan mesin, terutama mobil dan sepeda motor. Otomotif mulai berkembang sebagai cabang ilmu seiring dengan diciptakannya mesin
DAYA PENUNJANG
I N P U T
O U T P U T
MEMORI
CPU PERALATA
N OUTPUT
PERALATA
N IN
PUT

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 10
mobil. Dalam perkembangannya, mobil menjadi alat transportasi kompleks yang terdiri dari ribuan komponen yang tergolong dalam puluhan sistem dan subsistem.
Pompa bahan bakar adalah komponen penting dalam sebuah mobil atau mesin kombusi dalam lainnya. Bahan bakar harus dipompa dari tangki bensin ke mesin dan diantar dalam tekanan rendah ke karburator atau dalam tekanan tinggi ke sistem injeksi bahan bakar. Beberapa mesin injeksi bahan bakar memilki 2 macam pompa untuk tujuan ini: satu pompa tekanan rendah/volume besar di tangki dan satu tekanan tinggi/volume rendah di atau dekat mesin.
Suspensi adalah kumpulan komponen tertentu yang berfungsi meredam kejuatan, getaran yang terjadi pada kendaraan akibat permukaan jalan yang tidak rata yang dapat mengingkatkan kenyamanan berkendara dan pengendalian kendaraan. Ada dua jenis utama suspensi yaitu sistem suspensi dependen dan sistem suspensi independen.
Peredam kejut, shock absorber, shock breaker, atau damper adalah sebuah alat mekanik yang didesain utuk meredam hentakan yang disebabkan oleh energi kenetik. Peredam kejut adalah bagian penting dalam suspensi kendaraan bermotor, roda pendaratan pesawat terbang, dan mendukung banyak mesin industri. Peredam kejut berurukuran besar juga digunakan dalam arsitek dan teknik sipil untuk mengurangi kelemahan struktur akibat gempa bumi dan resonansi.
Dalam kendaraan, alat ini berfungsi untuk mengurangi efek dari kasarnya permukaan jalan. Tanpa peredam kejut, kendaraan dapat terlempar, seperti energi yang disimpan dalam per/pegas, kemudian dilepaskan pada kendaraan, barangkali melebihi gerakan suspensi. Kontrol gerakan berlebih pada suspensi tanpa peredam kejut diredam secara paksa oleh per yang kaku, yang dapat menyebabkan ketidaknyamanan dalam berkendara. Peredam kejut diperkenankan menggunakan per yang lembut yang mengontrol gerakan suspensi dalam merespon gundukan atau lubang. Dan juga, berhubungan dengan pelambatan efek fisik dalam ban itu sendiri, mengurangi grakan naik turun per. Karena ban tidak selembut per, untuk meredam hendakan ban mungkin dibutuhkan shock yang kaku yang lebih ideal untuk kendaraan.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 11
Peredam kejut pneumatik dan hidraulik umumnya mengambil bentuk sebuah silinder dengan piston yang bergerak didalamnya. Silinder harus diisi dengan cairan kentalm, seperti minyak hidraulik atau udara. Cairan ini diisikan ke dalam dashpot. Peredam kejut berbasi per umumnya menggunakan per keong atau per daun Per ideal itu sendiri, bukanlah peredam kejut seperti per yang hanya menyimpan dan tidak menghilangkan atau menyerap energi. Kendaraan biasanya menggunakan dua per atau pelang torsi yang berfungsi sebagaimana peredam kejut hidraulik. Dalam kombinasi ini, peredam kejut secara khusus menyediakan psiton hidroaulik yang menyerap dan menghilangkan getaran. Per tidak dianggap sebagai peredam kejut.
Peredam kejut harus menyerap atau menghilangkan energi. Desaiinya harus dipertimbangkan, oleh karena itu harus dibuat ketika mendesain atau memilih sebuath peredam kejut adalah ke mana energi akan pergi. Umumnya, dalam kebanyakan dashpot, energi diubah ke dalam panas di dalam cairan kental. Dalam silinder hidraulik, minyak hidraulik akan memanas. Dalam silinder udara, udara panas selalu dilepaskan ke atmosfer. Dalam tipe dashpot yang lain, seperti elektromagnetik, energi yang hilang dapat disimpan dan bisa digunakan kemudian jika diperlukan.
Sistem transmisi dalam otomotif, adalah sistem yang menjadi penghantar energi dari mesin ke diferensial dan as. Dengan memutar as, roda dapat berputar dan menggerakan mobil.
Transmisi diperlukan karena mesih pembakaran yang umumnya digunakan dalam mobil merupakan mesin pembakaran internal yang menghasilkan putaran (rotasi) antara 600 sampai 6000 rmp. Sedangkan, roda berputar pada kecapatan rotasi 0 sampai 2500 rmp.
Sekarang ini, terdapat dua sistem transmisi yang umum, yaitu transmisi manual dan transmisi otomatis. Terdapat juga sistem-sistem transmisi yang merupakan gabungan antara kedua sistem tersebut, namun ini merupakan perkembangan terakhir yang baru dapat ditemukan pada mobil-mobil berteknologi tinggi.
Transmisi manual merupakan salah satu jenis transmisi yang banyak dipergunakan dengan alasan perawatan yang lebih mudah. Biasanya pada transmisi manual terdiri dari 3 sampai dengan 7 speed.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 12
Transmisi semi otomatis adalah transmisi yang dapat membuat kita dapat merasakan sistem transmisi manual atau otomatis, bila kita sedang menggunakan sistem transmisi manual kita tidak perlu menginjak pedal kopling karena pada sistem ini pedal kopling sudah teratur secara otomatis.
Transmisi otomatis terdiri dari 3 bagian utama yaitu : Torque converter, planetrai gerar unit, dan Hydraulic control unit. Trorque converter berfungsi sebgai kopling otomatis dan dapat memperbesar momen mesin. Sedangkan Torque conventer terdiri dari Pump impeller, Turbine runner, dan Stator. Stator terletak diantar impeller dan turbine. Torque converter diisi dengan ATF (Automatic Transmition Fluid). Momen mesin dipindahkan dengan adanya aliran fluida.
Begitu banyaknya penggunaan sistem mekantronika dalam kehidupan kita memperkuat salah satu sifatnya yang multiguna(aplikatif). Sebagai contoh sistem mekatronik pada kendaraan bermotor adalah sistem rem ABS (Anti-block Breaking system) atau sistem pengeraman yang menghindari terkuncinya roda sehingga mobil tetap dapat dikendalikan dalam pengereman mendadak, ESP(Elektronik Stability Programm), ABC(Active Body Control) dan Motor-System. Contoh pada Teknologi Penerbangan. Dalan teknologi penerbangan moderen digunakan Comfort-In-Turbulence System sehinga dapat menginkatkan kenyamanan penumpang walau ketika terjadi turbelensi. Gust Load Alleviation serta banyak contoh lainnya. Pada Teknik Produksi :Contoh dalam teknik produksi adalah penggunaan sensor pada robot. Sistem kendali umpan balik pada eletromoto berkecapatan rotasi tinggi dengan ‘pemegang as. tenaga magnet.
Serta pemutar CD, Harddisk serta mesin pencetak berkecepatan tinggi, atau alat-alat elektronika yang biasa kita gunakan sehari-hari aplikasi mekantronika akan sangat sering kita jumpai

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 13
.
Gambar 1.5. Potensi pernerapan Sistem Cerdas dibidang mekatronika
Pada mobil juga terdapat berbagai sistem lain yang saat ini menerapkan sistem mekatronika, yaitu sistem transmisi autotamatis, sistem suspensi aktif, sistem anti-lock braking system (ABS), ssitem pengkondisi udara, serta display kecepatan, putaran mesin dan level bahan bakar.
Sistem pada kendaraan bermotor, mekatronika juga diterapkan pada berbagai hal antara lain :
• Perancangan sensor/transduser
Bila sukses, modifikasi
kontroler untuk aplikasi lain
yang diinginkan Sirkuit Cerdas Smart Circuit Uji coba
Kendaraan mini Kendaraan mini
Bidang Stasiun Pembangkit Listrik
Bidang Mekanisasi Pertanian
Bidang Otomasi pabrik
Bidang Industri Otomotif
Bidang Mekatronika yang lain
........

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 14
• Peralatan rumah tangga dan perkantoran :mesin cuci, mesin isap debu
timbangan digital, microwabe, remoter control, pembuat kopi, sistem
HVAC, kamera, mesin foto kopi dan masih banyak lagi.
• Berbagai peranti pada komputer :mouser, printer, disk drive, CD ROM
drive, keyboard
• Dunia penerbangan : pengendalian pesawat terbang secara Fly by Wire
(FBW)
• Peralatan medis dan laboratorium
• Bidang industri : monitoring dan kendali berbagai peralatan industri
• Bidang robotika

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 14
BAB II
Mekanika Statistika POKOK BAHASAN:
1. Pendahuluan 2. Momen lengan 3. Momen kesetimbangan 4. Torsi 5. Gear 6. Friksi
TUJUAN BELAJAR: Setelah mempelajari materi dalam bab ini, mahasiswa diharapkan mampu: Dapat memahami gaya yang ada didalam mesin (mekatronika) yang timbul dari berbgai sumber 2.1. Pendahuluan
Mekanika statistika adalah aplikasi teori probabilitas, yang memasukkan matematika untuk menangani populasi besar, ke bidang mekanika, yang menangani gerakan partikel atau objek yang dikenai suatu gaya. Bidang ini memberikan kerangka untuk menghubungkan sifat mikroskopis atom dan molekul individu dengan sifat makroskopis atau limbak (bulk) materi yang diamati sehari-hari, dan menjelaskan termodinamika sebagai produk alami dari statistika dan mekanika (klasik dan kuantum) pada tingkat mikroskopis. Mekanika statistika khususnya dapat digunakan untuk menghitung sifat termodinamika materi limbak berdasarkan data spektroskopis dari molekul individual.
Kemampuan untuk membuat prediksi makroskopis berdasarkan sifat mikroskopis merupakan kelebihan utama mekanika statistika terhadap termodinamika. Kedua teori diatur oleh hukum kedua termodinamika melalui

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 15
media entropi. Meskipun demikian, entropi dalam termodinamika hanya dapat diketahui secara empiris, sedangkan dalam mekanika statistika, entropi merupakan fungsi distribusi sistem pada kondisi mikro.
2.2.Momen Lengan
Pada gerak lurus atau gerak translasi, faktor yang menyebabkan adanya gerak adalah gaya (F). Sedangkan pada gerak rotasi atau gerak melingkar, selain gaya (F), ada faktor lain yang menyebabkan benda itu bergerak rotasi yaitu lengan gaya (l) yang tegak lurus dengan gaya. Secara matematis, momen gaya dirumuskan
τ = F x l
= F l Sin θ
Dimana θ adalah sudut antara lengan gaya l dengan gaya F. Jika antara lengan gaya l dan gaya F tidak tegak lurus maka
τ = F l
Lengan gaya merupakan jarak antara titik tumpuan atau poros ke titik dimana gaya itu bekerja. Jika gaya dikenakan berada di ujung lengan maka bisa kita katakan lengan gaya ( l ) sama dengan jari-jari lingkaran (r).
Sehingga momen gaya dapat juga kita tulis
τ = F . r
2.3. Momen Kesetimbangan
Syarat kesetimbangan dan Momen gaya adalah benda dikatakan berada dalam kesetimbangan apabila :
- Benda itu sebagai satu keseluruhan tetap diam atau bergerak menurut garis lurus dengan kecepatan konstan

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 16
- Benda itu tidak berotasi sama sekali atau berotasi dengan kecepatan tetap
Dalam kesetimbangan resultan dari semua gaya yang bekerja pada
benda tersebut sama dengan nol. Σ Fx = 0 dan Σ Fy = 0 Fx komponen-komponen gaya pada sumbu X Fy komponen-komponen gaya pada sumbu Y Resultannya : 22
yx FFF +=
Arahnya : FxFytg =θ
Momen gaya : perkalian antara besarnya gaya dengan lengan dari gaya tersebut : M = F. l
F1 l F2 O
Gambar 2.1. Suatu benda dalam kesetimbangan Suatu benda dikatakan dalam keadaan setimbang sempurna bila :
Σ F = 0 dan Σ M = 0
disini M adalah momen gaya F terhadap titk sembarang O. Jika gaya : F = Fx i + Fy j+ Fz k Vector posisi titik tangkap gaya : r = x i + y j+ z k Dan momen gaya : M = Mx i + My j+ Mz k Maka : M = r x F

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 17
= FzFyFxzyxkji
= (Fz .y – Fy.z) i+(Fx .z – Fz.x).j+(Fy . x – Fx. y).k disini : Mx = (Fz . y – Fy. z)
My = (Fx . z – Fz. x) Mz = (Fy . x – Fx. y)
Besar momen gaya M adalah : M = rxF = Fr sin θ = F.l Efek gaya F1 ialah rotasi berlawanan arah putaran jarum jam terhadap sumbu putar di O, biasanya diberi tanda positif, sedangkan efek gaya F2 ialah rotasi searah dengan jarum jam dan diberi tanda negative.
Satuan momen gaya adalah Newton – meter (N-m) atau (lb-ft) Jika garis gaya F1 dan F2 sejajar dan tidak berimpit seperti gambar dibawah ini, maka pasangan gaya tersebut dinamakan kopel, contoh umum sebuah kopel adalah gaya-gaya pada jarum kompas didalam medan magnet bumi. Pada kutub utara dan selatan jarum itu bekerja gaya yang sama besar, yang satu mengarah ke utara dan yang satu mengarah ke selatan F1 l r F2 Momen resultan dari kopel terhadap titik sembarang O adalah : C = ΣM = r1xF + r2x(-F) = (r1 - r2) F = r x F Besar momen Kopel C = rxF = r F sin θ = F.l Sebuah benda yang padanya bekerja sebuah kopel hanya dapat dalam keadaan seimbang bila ada kopel lain yang bekerja pada benda tersebut yang besarnya sama dan berlawanan arah.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 18
1.3.1. Gaya-gaya sebidang Gaya-gaya sebidang terletak dalam satu bidang datar, suatu sistem yang berpotongan terdiri dari gaya-gaya yang berpotongan di suatu titik yang disebut tititk perpotongan. Gaya-gaya berpotongan : gaya-gaya yang garis kerjanya berpotongan di suatu titik. Besar vektor resultannya adalah : 22 )()( YX FFR ∑+∑=
Dengan arah : X
Yx F
Ftg∑∑
=θ
Sebuah benda berada dalam keadaan setimbang jika dibawah pengaruh gaya-gaya yang berpotongan, maka :
- Benda itu diam dan tetap diam (disebut keadaan kesetimbang statik - Benda itu bergerak dengan vektor kecepatan yang tetap (disebut
kesetimbangan translasi) Syarat kesetimbangan : R = ΣF = 0 atau ΣFX = ΣFY = 0
Gaya – gaya paralel : gaya - gaya yang berpotongan di sutu titik tak berhingga. Gaya resultan ini mungkin :
- sebuah gaya R yang sejajar dengan sistem - suatu kopel - nol
Jika sitem paralel ini sejajar dengan sumbu Y maka : R = ΣF dan R . x = M0 disini x adalah jarak tegak lurus dari pusat momen O ke resultan R dan besarnya :
FMx
∑∑
= 0 =n
nn
FFFFFXFxFxFx
++++++++
.......................
321
332211
Jika ΣF = 0, kopel resultan jika ada besarnya sama dengan : xRMC .0 =∑= Gaya – gaya yang tidak berpotongan dan tidak sejajar adalah gaya – gaya yang garis kerjanya tidak berpotongan di satu titik dan tidak sejajar. Gaya resultan sistem mungkin :
- gaya tunggal R - suatu kopel dalam bidang sitem atau bidang sejajar - nol

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 19
Secara aljabar : 22 )()( YX FFR ∑+∑= dan X
Yx F
Ftg∑∑
=θ
Disini θx adalah sudut antara resultan R dengan sumbu x positif. Garis kerja gaya resultan R di peroleh dari persamaan : R . a = ΣM0 Disini a adalah jarak tegak lurus pusat momen O terhadap gaya resultan R . Sitem gaya yang bekerja pada benda tegar pada umumnya sitem tidak berpotongan dan tidak sejajar. Syarat kesetimbangan benda tegar di bawah pengaruh gaya – gaya bidang adalah : ΣF = 0 atau ΣFX = ΣFY = ΣFz 0 dan ΣM0 = 0 1.3.2.Pusat Massa Pusat massa : titik tangkap dari resultan gaya – gaya berat pada setiap anggota
sistem, yang jumlah momen gayanya terhadap titik tangkap ini (pusat massa ) sama dengan nol. Setiap benda titik mengalami gaya tarik bumi dengan gaya w = mg disebut gaya berat, arah gaya ini menuju pusat bumi, gaya ini akan berpotongan di tempat yang jauh sekali, arahnya dapat dikatakan sejajar.
Jadi : wsistem = Σmg
gmrgmr
i
iipm .
..∑∑
= =i
ii
mrm
∑∑ .
atau ditulis menurut komponen-komponennya :
i
iipm m
xmx∑∑
=. ,
i
iipm m
ymy∑∑
=. ,
i
iipm m
zmz∑∑
=.
(xpm, ypm, zpm), adalah koordinat dari pusat massa
Perhatikan : i
iipmpm m
rmdtdr
dtdv
∑∑
==.
=i
ii
i
ii
mvm
m
rdtdm
∑∑
∑).()(
).(i
iipmpm m
vmdtdv
dtda
∑∑
==

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 20
=i
ii
i
ii
mam
m
vdtdm
∑∑
∑).()(
untuk benda rigid : ∫∑ =∆→∆
∞
=
dmmm i
i 10lim
benda rigid adalah benda yang terdiri dari banyak sekali titik-titik massa. Jadi
koordinat titik massa benda rigid : ∫= dmdmxxpm. , ∫= dm
dmyypm. , ∫= dm
dmzzpm.
dm = ρ.dv atau dm = σ.dA, atau dm = λ.dl jika : ρ = massa persatuan volume (v)
σ = massa persatuan luas (A) λ = massa persatuan panjang (l)
jadi kordinat titik pusat massa juga dapat ditulis sebagai berikut :
∫= vdvxxpm. atau ∫= A
dAxxpm. atau ∫= l
dlxxpm.
∫= vdvyypm. atau ∫= A
dAyypm. atau ∫= l
dlyypm.
∫= vdvzzpm. atau ∫= A
dAzzpm. atau ∫= l
dlzzpm.
Jika benda rigid yang homogen mempunyai bentuk simetri, pusat massa akan berimpit dengan pusat simetrinya, misalnya bola, parallel epipedum(balok), kubus, dan lain-lain.Jika benda rigid yang homogen mempunyai sumbu simetri misalnya kerucut, silinder, maka pusat massanya akan berada pada sumbu simetrinya. 1.3.3. Titik Berat Titik berat : titik-titik yang dilalui oleh garis kerja dari resultan gaya berat
sitem benda titik, berarti merupakan titik potong dari garis kerja gaya berat bila letak dari sitem ini berubah – ubah. Misal benda rigid seperti gambar dibawah ini :
PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 21
tali 01 t
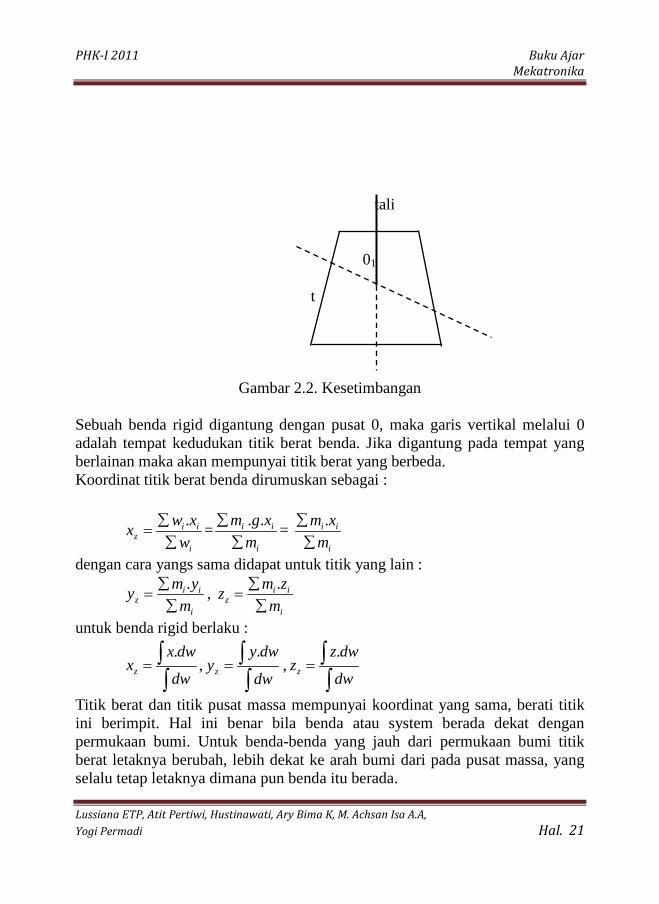
Gambar 2.2. Kesetimbangan Sebuah benda rigid digantung dengan pusat 0, maka garis vertikal melalui 0 adalah tempat kedudukan titik berat benda. Jika digantung pada tempat yang berlainan maka akan mempunyai titik berat yang berbeda. Koordinat titik berat benda dirumuskan sebagai :
i
iiz w
xwx∑∑
=. =
i
ii
mxgm
∑∑ .. =
i
ii
mxm
∑∑ .
dengan cara yangs sama didapat untuk titik yang lain :
i
iiz m
ymy∑∑
=. ,
i
iiz m
zmz∑∑
=.
untuk benda rigid berlaku :
∫∫=
dw
dwxxz
.,
∫∫=
dw
dwyyz
.,
∫∫=
dw
dwzzz
.
Titik berat dan titik pusat massa mempunyai koordinat yang sama, berati titik ini berimpit. Hal ini benar bila benda atau system berada dekat dengan permukaan bumi. Untuk benda-benda yang jauh dari permukaan bumi titik berat letaknya berubah, lebih dekat ke arah bumi dari pada pusat massa, yang selalu tetap letaknya dimana pun benda itu berada.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 22
2.4. Torsi
Definisi Torsi adalah Suatu batang dijepit dengan kuat pada salah satu
ujungnya dan ujung yang lainnya diputar dengan suatu torsi (momen puntir, twisting moment) T = Fd yang bekerja pada bidang tegaklurus sumbu batang seperti terlihat pada Gb. 5-1. Batang tersebut dikatakan dalam kondisi kena torsi. T adalah torsi (Nm), F adalah gaya (N) dan d adalah diameter lengan putar (m). Alternatif lain untuk menyatakan adanya torsi adalah dengan dua tanda vektor dengan arah sejajar sumbu batang.
Gambar 2.3. Torsi yang bekerja pada bidang tegak lurus sumbu batang
1.4.1. Momen kutub inersia
Untuk suatu batang bulat berlobang (pipa) dengan diameter luar Do dan diameter dalam Di, momen kutub inersia (polar moment of inertia) penampang melintang luasnya, biasanya dinotasikan dengan J, diberikan dengan:
)(32
44io DDJ −=
π
Momen kutub inersia untuk batang bulat tanpa lubang (batang pejal) dapat diperoleh dengan memberi nilai Di = 0. Kuantitas dari J merupakan sifat matematis dari geometri penampang melintang yang muncul dalam kajian tegangan pada batang atau poros bulat yang dikenai torsi.
Sering untuk tujuan praktis, persamaan diatas ditulis kembali dalam bentuk:
))((32
2222ioio DDDDJ −−=
π
d T
F
F

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 23
))()((32
22ioioio DDDDDD −−−=
π
Bentuk terakhir dari persamaan diatas sangat berguna khususnya pada evaluasi numeris J dimana perbedaan antara )( io DD − adalah kecil. 1.4.2. Torsi tegangan geser
Baik untuk poros pejal maupun poros berlubang yang dikenai momen puntir T torsi tegangan geser (torsional shearing stress) τ pada jarak p dari titik pusat poros dinyatakan dengan:
J
Tp=τ
Gambar 2.4. Distribusi tegangan bervariasi
Penjabarannya diberikan dalam contoh 1. Distribusi tegangan bervariasi dari nol pada pusat poros sampai dengan maksimum pada sisi luar poros seperti diilustrasikan pada Gb. 2.4
1.4.3.Regangan geser Suatu garis membujur a-b digambarkan pada permukaan poros tanpa
beban. Setelah suatu momen puntir T dikenakan pada poros, garis a-b bergerak menjadi a-b’ seperti ditunjukkan pada Gb. 2.5. Sudut γ, yang diukur dalam radian, diantara posisi garis akhir dengan garis awal didefinisikan sebagai regangan geser pada permukaan poros. Definisi yang sama berlaku untuk setiap titik pada batang poros tersebut.
Do
p τ

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 24
Gambar 2.5. Garis a-b bergerak menjadi a-b’
1.4.4. Modulus elastisitas geser
Rasio tegangan geser τ terhadap regangan geser γ disebut modulus elastisitas geser dan, seperti pada bab 4, diformulasikan dengan:
γτ
=G
Lagi, dimensi untuk G adalah sama dengan dimensi tegangan geser, karena regangan geser tak berdimensi. 1.4.5.Sudut puntir
Jika suatu poros dengan panjang L dikenai momen puntir T secara konstan dikeseluruhan panjang poros, maka sudut puntir (angle of twist) θ yang terbentuk pada ujung poros dapat dinyatakan dengan
GJTL
=θ
dimana J menunjukkan momen inersia pada penampang melintang poros. Lihat Gb. 5-4. Persamaan ini hanya berlaku untuk poros dalam kondisi elastis.
Gambar 2.6. Penampang melintang poros
1.4.6.Torsi plastis Apabila momen puntir yang bekerja baik pada poros pejal maupun poros
berlubang dinaikkan terus, nilai momen puntir mungkin akan mencapai titik
T T
b a b’
γ
T T
θ L

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 25
lelah geser dari bahan bagian luar. Ini adalah batas maksimum untuk momen puntir elastis dan dinyatakan dengan Te. Kenaikan selanjutnya dari momen puntir menyebabkan tercapainya titik-titik lelah pada bahan untuk posisi lapis yang semakin kedalam, sampai keseluruhan lapisan bahan mencapai titik lelahnya; dan ini menunjukkan terjadinya momen puntir plastis penuh (fully plastic twisting moment) Tp. Kita tidak bicarakan tegangan yang lebih besar dari batas titik lelah, karena ini adalah batas momen puntir yang dapat diberikan oleh poros. Dari hasil beberapa pengujian diperoleh bahwa Tp = 4/3(Te).
Gambar 2.7. Momen puntir yang bekerja pada poros pejal
dimana sudut α diukur dalam radian. Berdasarkan geometri pada gambar diperoleh
Contoh 1. Jabarkan hubungan antara momen puntir yang bekerja pada poros pejal
dan regangan geser yang terjadi pada sembarang titik pada poros tersebut.
Lr
LAB θα ==
atau Lrθγ =
Tetapi karena diameter poros oleh pengaruh pembebanan adalah tetap setelah torsi, unit regangan geser pada jarak ρ dari pusat poros dapat dinyatakan dengan Lp /ρθγ = . Konsekuensinya regangan geser pada titik titik arah longitudinal bervariasi secara linier sebagai fungsi jarak dari pusat poros.
Jika hanya kita perhatikan pada rentang linier dimana tegangan geser proporsional dengan regangan geser, maka terbukti bahwa tegangan geser pada arah longitudinal bervariasi linier terhadap jarak dari pusat poros. Distribusinya adalah simetris pada sekeliling sumbu poros, seperti ditunjukkan pada gambar (d). Untuk kesetimbangan, jumlah momen distribusi gaya geser pada potongan
T T
(a)

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 26
melintang ini sama dengan besarnya momen puntir. Juga jumlah momen gaya-gaya adalah sama dengan besarnya torsi T . Dengan demikian
∫=r
pdaT0τ
Gambar 2.8. Luasan elemen bidang cincin yang diarsir
dimana da menyatakan luasan elemen bidang cincin yang diarsir pada gambar 2.8.. Namun demikian, tegangan geser bervariasi terhadap jarak dari sumbu poros; maka C
rrp ==
τρτ
dimana subskrip pada tegangan geser menunjukkan jarak elemen dari sumbu poros. Konsekuensinya kita dapat menulis ∫ ∫==
r rdadaT
0 0
22 )( ρρτ
ρρτ ρρ
karena rasio τρ/ρ adalah konstanta. Namun, pernyataan ∫r
da0
2ρ berdasarkan
definisi adalah momen inersia luasan penampang melintang. Dengan demikian diperoleh:
ρτ ρ J
T = atau J
Tρτ ρ =
r ρ
dρ
τ

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 27
Gambar 2.9. Sudut Puntir
Misalkan L adalah panjang poros, dan J adalah momen inersia penampang melintang, T adalah momen puntir (diasumsikan konstan sepanjang poros), dan G adalah modulus elastisitas geser. Sudut puntir pada panjang L adalah θ seperti ditunjukkan gambar disamping. Dari contoh 1, kita dapatkan bahwa untuk posisi dimana ρ = r:
Contoh 2. Jabarkan penyataan untuk sudut puntir suatu poros sebagai fungsi momen puntir. Asumsikan bahwa poros bekerja pada rentang elastis.
Lr
rθγ = dan
JTr
r =τ
Berdasarkan definisi, modulus geser diberikan dengan θθγ
τJTL
LrJTrG ===
// ,
dimana selanjutnya kita peroleh GJTL
=θ . Disini θ dinyatakan dalam radian.
Kadang-kadang sudut puntir juga dinyatakan dalam unit panjang; sering dinyatakan dengan φ , dan dinyatakan dengan GJTL // ==θφ Contoh 3. Suatu poros dijepit di salah satu ujungnya, ujung lainnya bebas, dan dibebani dengan momen putir secara seragam disepanjang poros dengan besar t per satuan panjang gambar 2.10.a Kekakuan poros adalah GJ. Tentukan besarnya sudut puntir pada ujung bebas poros.
T T
θ L
PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 28
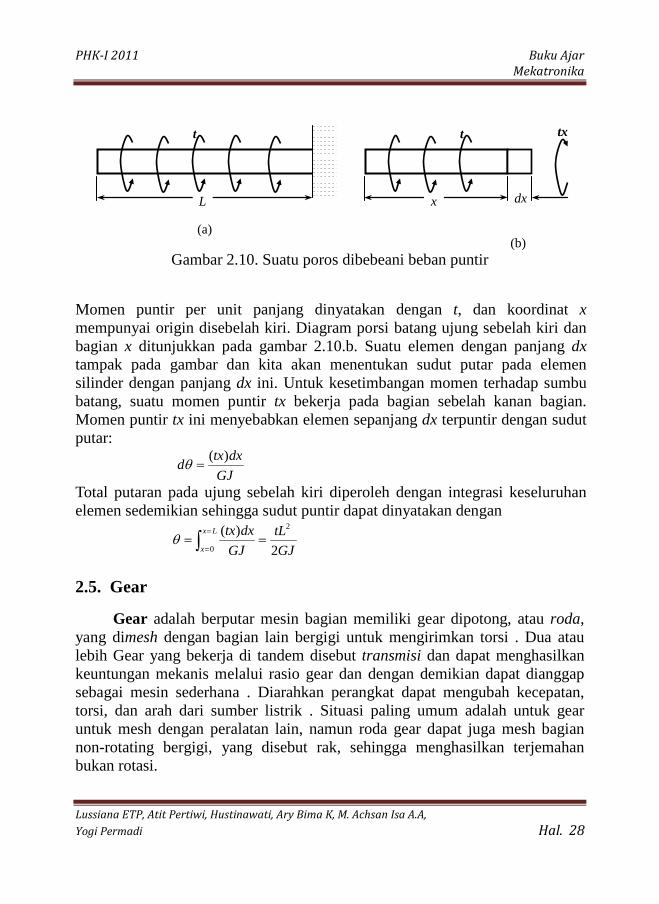
Gambar 2.10. Suatu poros dibebeani beban puntir
Momen puntir per unit panjang dinyatakan dengan t, dan koordinat x mempunyai origin disebelah kiri. Diagram porsi batang ujung sebelah kiri dan bagian x ditunjukkan pada gambar 2.10.b. Suatu elemen dengan panjang dx tampak pada gambar dan kita akan menentukan sudut putar pada elemen silinder dengan panjang dx ini. Untuk kesetimbangan momen terhadap sumbu batang, suatu momen puntir tx bekerja pada bagian sebelah kanan bagian. Momen puntir tx ini menyebabkan elemen sepanjang dx terpuntir dengan sudut putar:
GJdxtxd )(
=θ
Total putaran pada ujung sebelah kiri diperoleh dengan integrasi keseluruhan elemen sedemikian sehingga sudut puntir dapat dinyatakan dengan
∫=
===
Lx
x GJtL
GJdxtx
0
2
2)(
θ
2.5. Gear
Gear adalah berputar mesin bagian memiliki gear dipotong, atau roda, yang dimesh dengan bagian lain bergigi untuk mengirimkan torsi . Dua atau lebih Gear yang bekerja di tandem disebut transmisi dan dapat menghasilkan keuntungan mekanis melalui rasio gear dan dengan demikian dapat dianggap sebagai mesin sederhana . Diarahkan perangkat dapat mengubah kecepatan, torsi, dan arah dari sumber listrik . Situasi paling umum adalah untuk gear untuk mesh dengan peralatan lain, namun roda gear dapat juga mesh bagian non-rotating bergigi, yang disebut rak, sehingga menghasilkan terjemahan bukan rotasi.
(a)
L
t
(b)
x
t
dx
tx
PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 29
Roda gear dalam transmisi analog dengan roda di katrol . Keuntungan dari gigi adalah bahwa gear dari roda gigi mencegah tergelincir. Ketika dua gear dari jumlah tidak sama gear digabungkan. Keuntungan mekanik yang dihasilkan, dengan baik kecepatan rotasi dan torsi dari dua roda gear yang berbeda dalam suatu hubungan yang sederhana.
Dalam transmisi yang menawarkan beberapa rasio gigi, seperti sepeda dan mobil, istilah gear, seperti pada gear satu, mengacu pada rasio gear daripada gear fisik yang sebenarnya. Istilah ini digunakan untuk menggambarkan perangkat sejenis bahkan ketika rasio gear terus menerus bukan diskrit , atau bila perangkat tidak benar-benar mengandung gear, seperti dalam transmisi continuously variable . [1]
Referensi paling awal yang diketahui adalah sekitar gigi AD 50 oleh Pahlawan dari Alexandria , [2] tetapi mereka dapat ditelusuri kembali ke Yunani mekanik dari sekolah Aleksandria pada abad ke-3 SM dan itu sangat dikembangkan oleh Yunani polymath Archimedes (287-212 SM). [3] Para mekanisme Antikythera adalah contoh dari perangkat diarahkan sangat awal dan rumit, yang dirancang untuk menghitung astronomi posisi. Waktu konstruksi sekarang diperkirakan antara 150 dan 100 SM. [4]
Gambar 2.11. Gear
1.5.1.Perbandingan dengan mekanisme drive Rasio kecepatan tertentu yang hasil dari memiliki gigi persneling
memberikan keuntungan lebih dari drive lain (seperti traksi drive dan V-sabuk ) dalam mesin presisi seperti jam tangan yang bergantung pada rasio kecepatan yang tepat. Dalam kasus di mana driver dan pengikut berada di dekat gigi juga memiliki keuntungan lebih dari drive lain dalam berkurangnya jumlah bagian yang diperlukan; downside adalah bahwa roda gigi yang lebih mahal untuk memproduksi dan persyaratan pelumasan mereka dapat mengenakan biaya

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 30
operasi yang lebih tinggi. Para mobil transmisi memungkinkan pemilihan antara gigi untuk memberikan keuntungan mekanik berbagai. Jenis Bentuk Keterangan Eksternal vs internal yang gigi
Sebuah gigi eksternal adalah satu dengan gigi yang terbentuk pada permukaan luar dari silinder atau kerucut. Sebaliknya, sebuah gigi internal adalah satu dengan gigi yang terbentuk pada permukaan dalam dari silinder atau kerucut. Untuk roda gigi bevel, sebuah gigi internal adalah salah satu dengan sudut pitch melebihi 90 derajat. Internal gigi tidak menyebabkan pembalikan arah. [5]
Memacu
Spur gear Spur gigi atau gigi lurus dipotong adalah tipe sederhana gigi. Mereka terdiri dari sebuah silinder atau disk dengan gigi memproyeksikan radial, dan meskipun mereka tidak lurus-sisi dalam bentuk, tepi tiap gigi lurus dan sejajar sejajar dengan sumbu rotasi. Gigi ini dapat menyatu bersama-sama dengan benar hanya jika mereka dipasang ke poros paralel
Spiral
Helical gigi Top: konfigurasi paralel Bawah: Konfigurasi menyeberangi Helical atau "kering tetap" gigi menawarkan perbaikan atas gir pendorong. Tepi terkemuka dari gigi tidak sejajar dengan sumbu rotasi, namun ditetapkan di sudut. Karena gigi melengkung, memancing ini menyebabkan bentuk gigi menjadi segmen dari heliks . Gigi heliks dapat menyatu dalam orientasi paralel atau menyeberang. Yang pertama mengacu pada ketika poros yang sejajar satu sama lain, ini adalah orientasi yang paling umum. Pada yang terakhir, poros non-paralel, dan dalam konfigurasi ini kadang-kadang dikenal sebagai "roda gigi miring".

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 31
Gigi miring terlibat lebih bertahap daripada memacu gigi gigi menyebabkan mereka untuk berjalan lebih lancar dan tenang. [6] Dengan roda gigi heliks paralel, setiap pasangan gigi pertama membuat kontak pada satu titik di salah satu sisi roda gigi; kurva bergerak kontak kemudian tumbuh secara bertahap di seluruh muka gigi secara maksimal maka surut sampai gigi memutuskan kontak pada satu titik di seberang. Dalam memacu gigi gigi tiba-tiba bertemu di kontak baris di seluruh lebar mereka menyebabkan stres dan kebisingan. Spur gigi membuat merengek karakteristik pada kecepatan tinggi. Sedangkan gir pendorong digunakan untuk aplikasi kecepatan rendah dan situasi-situasi di mana kontrol kebisingan tidak masalah, penggunaan gigi heliks diindikasikan bila aplikasi melibatkan kecepatan tinggi, transmisi listrik yang besar, atau di mana pengurangan kebisingan adalah penting. Kecepatan dianggap tinggi ketika kecepatan melebihi garis lapangan 25 m / s. [7] Kelemahan dari heliks gigi adalah resultan dorong sepanjang sumbu roda gigi, yang perlu diakomodasi oleh tepat bantalan dorong , dan gelar yang lebih besar dari geser gesekan antara meshing gigi, sering ditangani dengan aditif dalam pelumas. 1.5.2. Skew gigi Untuk konfigurasi 'menyeberangi' atau 'miring' roda gigi harus memiliki sudut tekanan yang sama dan pitch normal, namun sudut heliks dan wenangan dapat berbeda. Hubungan antara dua shaft sebenarnya ditentukan oleh sudut heliks (s) dari dua shaft dan wenangan, seperti yang didefinisikan: [8]
E = β 1 + β 2 untuk gigi dari wenangan yang sama E = β 1 - β 2 untuk gigi dari wenangan yang berlawanan
Di mana β adalah sudut heliks untuk gigi. Konfigurasi menyeberangi kurang mekanis suara karena hanya ada titik kontak antara roda gigi, sedangkan dalam konfigurasi paralel ada kontak baris. [8] Roda gigi heliks cukup umum digunakan dengan sudut heliks dari satu memiliki negatif dari sudut heliks yang lain; seperti sepasang mungkin juga disebut sebagai memiliki heliks kanan dan heliks kidal dari sudut yang sama. Dua sudut yang sama tetapi berlawanan menambah nol: sudut antara poros adalah nol - yaitu, poros sejajar. Dimana jumlah atau perbedaan (seperti yang dijelaskan dalam persamaan di atas) tidak nol poros disilangkan. Untuk shaft menyilang di sudut kanan sudut heliks adalah dari tangan yang sama karena mereka harus menambah 90 derajat.
• 3D Animasi roda gigi heliks (sumbu paralel) • Animasi 3D roda gigi heliks (sumbu melintasi)

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 32
2.6. Friksi
Friksi adalah gaya yang menahan gerakan sliding atau rolling satu benda terhadap benda lainnya. Friksi merupakan faktor yang penting dalam mekanisme operasi sebagian besar peralatan atau mesin.
Friksi besar (high friction) dibutuhkan untuk bekerjanya mur dan baut, klip kertas, penjepit (tang catut), sol sepatu, alat pemegang dll. Gaya friksi dibutuhkan pada saat kita jalan agar tidak terpeleset. Friksi juga dibutuhkaan agar dapat menumpuk pasir, apel dll. Namun friksi juga merupakan tahanan tehadap gerakan yang bersifat merugikan.20% tenaga mesin mobil dipergunakan untuk mengatasi gaya friksi pada elemen mesin yang bergerak. Oleh karena itu friksi kecil (low friction), dikehendaki untuk benda yang bergerak seperti mesin tenaga (engine), ski, elemen arloji/jam dll.
Disamping itu juga dibutuhkan friksi konstan (constant friction ) yaitu untuk rem, dan kopling agar geakkan tidak tersendat sendat. Friksi telah dipelajari sebagai cabang mekanika beberapa ratus tahun yang lalu, dan hukum dan metode untuk memperkirakan besarnya friksi telah diketahui 2 abad lalu. Manun mekanisme friksi, yaitu proses hilangnya energi jika dua permukaan saling bergesek tidak dapat diterangkan dengan baik. Penyebab utama friksi antara dua logam kelihatannya adalah gaya tarik (adesi) daerah kontak (contact region) dari permukaan yang secara mokroskopik tidak beraturan. Jika diperbesar permukaan menyerupai bukit dan lembah. Jika ada beban, ketika 2 permukaan bersinggungan, dua bukit menempel (adesi atau menyatu) atau terkunci dilembah permukaan dihadapannya. Friksi timbul akibat adanya geseran (shearing) bukit yang menyatu tersebut dan jua akibat ketidak teraturan permukaan.tersebut, bagian yang keras tertanam kepada bagian lunak. Friksi dari slidding dua benda padat yang diperoleh dari ekperimen sederhana menghasilkan kesimpulan sbb : 1. Besarnya friksi hampir tidak bergantung pada luas kontak .
Jika sebuah bata ditarik diatas meja, gaya friksi tetap sama, baik posisi bata berdidri ataupun tidur. (Leonardo da Vinci (1452-1519)
2. Friksi berbanding lurus dengan beban yang bekerja pada permukaan. Jika bata ditumpuk empat ditarik diatas meja, besarnya friksi empatkalinya friksi satu batayang ditarik.. Jadi rasio gaya friksi F terhadap beban L adalah tetap.
PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 33
Rasio yang tetap tersebut disebut koefisen friksi (coefficient of friction ) dan biasanya diberi simbol huruf Yunani mu (μ ). Secara matematik persamaan dapat ditulis sbb :
Koefisien friksi tidak punya satuan, karena friksi dan beban yang diukur dalam satuan gaya (pound atau Newton) saling meniadakan. Sebagai contoh : Harga koefisien friksi μ=0,5 untuk kasus bata ditarik diatas kayu yang berarti bahwa dibtuhkan gaya sebesar setengah dari berat bata untuk mengatasi friksi, dan menjaga bata bergerak secara konstan. Gaya friksi arahkan berlawanan dengan arah gerak bata. Karena friksi timbul antara permukaan yang bergerak maka ini disebut friksi kinetik (kinetic friction). Ini untuk membedakan dengan friksi statik (static friction), yang bekerja pada permukaan yang diam. Harga friksi statik selalu lebih besar dari friksi kinetik Friksi rolling (rolling friction) terjadi jika suatu roda, slinder ataupun bola menggelinding bebas diatas permukaan, sepertihalnya pada ball tau roller bearing. Sumber friksi utama dalam gerakan rolling adalah disipasi energi yang meilbatkan deformasi benda. Jika bola keras menggelinding diatas permukaan, bola sedikit peyang dan permukaan sedikit legok pada daerah kontak. Deformasi elastik atau kompresi pada daerah kontak tersebut merupakan penghambat gerakan dan energinya tidak kembali saat benda kembali ke bentuk semula. Enegi yang hilang pada kedua bagian permukaan sama dengan energi yang hilang pada bola yang jatuh dan terpantul. Besarny friksi slidding pada umumnya 100 sampai 1000 kali lebih besar dibandingkan dengan friksi rolling.Keuntungan gerakan rolling dipahami oleh manusia pendahulu sehingga ditemukan roda.
PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 34
BAB III
Mekanika Dinamika POKOK BAHASAN:
1. Perpindahan 2. Kecepatan 3. Percepatan 4. Momentum
TUJUAN BELAJAR: Setelah mempelajari materi dalam bab ini, mahasiswa diharapkan mampu memahami mengenai konsep dan analisa dinamik pada mesin (robot)

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 35
3.1. Pendahuluan Apabila kita membicarakan tentang mekatronika, maka persepsi
yang muncul tidak lepas dari mesin yang dapat bergerak ke segala arah, baik bergerak lurus maupun bergerak melingkar. Seperti diketahui bahwa pergerakan muncul apabila terjadi perubahan gaya pada suatu benda. Dengan demikian dalam membahas mekatronika, maka erat hubungannya dengan mekanika seperti kinematika dan dinamika. Besaran-besaran fisis yang timbul antara lain: perpindahan atau perubahan posisi, kecepatan, percepatan, momentum, dan lainnya.
Gerak didefinisikan sebagai keadaan benda yang melakukan perpindahan akibat adanya perubahan gaya. Di dalam ilmu Fisika gerak dibedakan menjadi gerak lurus, gerak proyektil, dan gerak melingkar. Gerak lurus dibedakan menjadi gerak lurus beraturan dan gerak lurus berubah beraturan. Untuk mengukur besarnya perpindahan (jarak) direpresentasikan sebagai S, yang menunjukkan perpindahan posisi dari satu posisi ke posisi yang lain, sedangkan kecepatan benda dinyatakan dalam v, dan percepatan yang ditimbulkan direpresentasikan dalam a.
3.2. Perpindahan
3.2.1. Perpindahan dalam gerak lurus beraturan Seperti diketahui bahwa perpindahan erat kaitannya dengan
pergerakan, sedangkan pergerakan dapat dibedakan menurut jenis lintasannya dan perubahan kecepatan yang terjadi. Apabila lintasan benda berupa garis lurus, maka dikategorikan ke dalam gerak lurus. Untuk kecepatan yang konstan disebut dengan Gerak Lurus Beraturan, sedangkan bila terjadi perubahan kecepatan, maka gerak tersebut termasuk dalam Gerak Lurus Berubah Beraturan.
Perpindahan S, dalam gerak lurus beraturan dinyatakan dengan hubungan:
tvS ∆= (3.1)

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 36
S: menyatakan besar perpindahan v: Kecepatan benda
∆t:waktu yang diperlukan untuk melakukan perpindahan
3.2.2. Perpindahan dalam gerak lurus berubah
beraturan Selain Gerak Lurus Beraturan, dapat pula berada pada kondisi
Gerak Lurus Berubah Beraturan. Gerak ini bercirikan memiliki kecepatan yang tidak konstan, sehingga dapat berubah menjadi lebih cepat atau sebaliknya menjadi lebih lambat. Apabila kecepatan bertambah maka terjadi percepatan, sedangkan bila kecepatan berkurang sebaliknya terjadi pelambatan.
3.3. Percepatan, Kecepatan, dan Perpindahan Di dalam fisika besar percepatan dinotasikan dengan a. Besar a
diukur dari perbandingan perubahan kecepatan terhadap perubahan waktu, dan direpresentasikan dalam persamaan (3.2):
tva∆∆
= (3.2)
∆v: perubahan kecepatan ∆t: waktu yang diperlukan
Bila kecepatan awal dinotasikan sebagai vo, dan kecepatan selang waktu ∆t adalah vt, maka besar perubahan kecepatan adalah ∆v sebesar:
ot vvv −=∆ Dari persamaan (3.2) didapatkan:
tav ∆=∆ )( otot ttavv −=− , apabila to =0 maka
atvv ot += (3.3)

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 37
Besar perpindahan S diukur berdasarkan hubungan: dtvdS t=
∫= dtvS t
2
21 attvS o += (3.4)
Pada kenyataannya dalam performa mekatronika, selain gerak lurus yang banyak digunakan adalah gerak melingkar. Seperti pada gerak lurus, gerak melingkar terbagi ke dalam Gerak Melingkar Beraturan dan Gerak Melingkar Berubah Beraturan.
3.4. Gerak Melingkar Beraturan
Jika benda bergerak di sepanjang lintasan yang berbentuk lingkarang atau di sekeliling lingkaran dengan kelajuan konstan, maka benda tersebut dinyatakan melakukan gerak melingkar beraturan. Kecepatan pada gerak melingkar selalu konstan, namun arahnya berubah-ubah dan menyinggung lingkaran. Dengan demikian v selalu tegak lurus garis yang ditarik melalui titik pusat lingkaran ke sekeliling lingkaran tersebut. Gerak melingkar ini seperti diilustrasikan pada Gambar 3.1.
Gambar 3.1. Gerak melingkar beraturan
Dari Gambar 3.1. diasumsikan benda mulai bergerak dari titik P, dan melakukan pergerakan satu lingkaran penuh, maka waktu yang diperlukan untuk melakukan gerak satu lingkaran disebut sebagai waktu edar atau perioda. Perioda dinotasikan dalam T. Banyaknya putaran yang

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 38
dihasilkan dalam satu detik menyatakan besar frekuensi (f) yang dinyatakan dalam Hz atau cps (cycle per second).
3.4.1. Kecepatan Linier dan Kecepatan Sudut
Jika waktu yang dibutuhkan untuk menempuh lintasan satu lingkaran adalah T dan menempuh jarak sejauh 2πR, maka kelajuan
benda untuk mengelilingi lintasan dinyatakan dalam Tsv = , inilah yang
dinyatakan sebagai kecepatan linier. Kecepatan sudut (angular) dinotasikan sebagai ω merupakan perubahan perpindahan sudut per satuan waktu. Untuk menyatakan kecepatan sudut seringkali dinyatakan dalam radian. Sebagai contoh radian per detik (rps) atau radian per menit (rpm). Keadaan tersebut dapat diekspresikan sebagai:
iperlukanwaktuyangdradianbesarsudut )(
=ω (3.5)
Jika benda melakukan perpindahan sebanyak satu putaran maka:
Tπω 2
= rad/detik
fπω 2= Secara umum hubungan kecepatan linier (v) dengan kecepatan
angular (ω) dapat dinyatakan sebagai berikut:
ttπθω 2
== (3.6)
persamaan (3.6) menyatakan besar perubahan arah gerak per satu satuan waktu, sedangkan untuk kecepatan linier dinyatakan dengan:
tR
tsv π2== (3.7)
persamaan (3.7), s menyatakan jarak yang ditempuh selama satu lingkaran penuh. Dengan demikian didapatkan:

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 39
Rv ω= (3.8)
Berkaitan dengan aplikasi mekatronika, sering kali penggunaannya pada susunan roda. Gerak pada susunan roda ini dapat dibedakan menjadi sistem gerak langsung, sistem gerak tidak langsung, dan sistem gerak dalam satu sumbu. 3.4.2. Sistem Gerak Susunan Roda Secara Langsung
Sistem gerak melingkar ini seperti pada ilustrasi Gambar 3.2.
Gambar 3.2. Sistem gerak susunan roda secara langsung
Pergerakan pada sistem langsung adalah melalui persinggungan
roda I dan roda II. Pada pergerakan ini jelas bahwa kecepatan linier yang terjadi pada roda I dengan roda II adalah sama, sedangkan untuk kecepatan angularnya berbeda, atau:
21 vv =
21 ωω ≠
3.4.3. Sistem Gerak Susunan Roda Secara Tidak Langsung Contoh gerak melingkar dengan susunan roda tidak langsung
adalah pada ban berjalan (conveyer), yaitu roda yang dikaitkan dengan ban, tali, atau rantai yang digunakan untuk mengangkut beban. Sistem gerak tersebut seperti diilustrasikan pada Gambar 3.3.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 40
Gambar 3.3. Sistem gerak susunan roda secara tidak langsung
Berdasarkan Gambar 3.3. pergerakan dengan sistem ini
memiliki kecepatan linier yang sama, sedangkan kecepatan angularnya berbeda, dengan demikian berlaku seperti pada sistem langsung, yaitu:
21 vv = dan 21 ωω ≠
3.4.4. Gerak Melingkar pada Sistem Roda dengan Satu Sumbu Jenis gerak melingkar lain yang sering digunakan untuk
kebutuhan rekayasa dan mekatronika adalah sistem roda dengan menggunakan satu sumbu untuk melakukan gerak, seperti yang diilustrasikan pada Gambar 3.4.
Gambar 3.4. Gerak melingkar pada sistem roda dengan satu sumbu
Pada Gambar 3.4. tampak bahwa roda I memiliki jari-jari lebih
kecil dibanding jari-jari roda II. Kedua roda tersebut disusun dalam titik pusat yang sama atau berada dalam satu poros putar. Apabila roda tersebut diputar, maka kecepatan linier roda I berbeda dengan roda II, sedangkan kecepatan angular dari masing-masing roda adalah sama besar. Hal ini ditunjukkan oleh titik A, B, dan C yang berada pada sudut yang sama, dengan demikian:

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 41
21 vv ≠ dan 21 ωω = Atau dengan kata lain:
CBA vvv ≠≠ dan CBA ωωω == (3.9)
3.5. Percepatan pada Gerak Melingkar Jika benda melakukan gerak melingkar dengan kelajuan tetap, maka
arah gerak benda tersebut memiliki perubahan yang tetap, dengan demikian harus ada yang mengubah arah dari kecepatan tersebut. Seperti yang telah diketahui bahwa perubahan kecepatan erat kaitannya dengan percepatan, sehingga untuk mengubah arah kelajuan pada gerak ini tidak lain adalah percepatan geraknya. Arah percepatan yang timbul selalu tegak lurus dengan arah kecepatan yang dimiliki, oleh karena arah kecepatan linier selalu menyinggung lingkaran, sedangkan arah percepatan adalah tegak lurus terhadap kecepatannya, maka jelaslah bahwa arah percepatan yang timbul adalah menuju pusat lingkaran. Arah yang menuju pusat lingkaran ini disebut dengan centripetal, sehingga percepatan yang memiliki arah ke pusat lingkaran dinamakan sebagai percepatan centripetal. Besar percepatan centripetal didefinisikan sebagai:
( )R
va linier
cp
2
= (3.10)
3.6. Momentum
Momentum benda yang dinotasikan dengan p didefinisikan sebagai perkalian massa dengan besar kecepatan gerak benda. Apabila benda bergerak dengan lintasan lurus, disebut dengan momentum linier, maka:
p = m v sedangkan apabila benda bergerak melingkar, maka momentumnya
disebut dengan momentum sudut, dan besarnya adalah: l = r x p 𝑙𝑙 = 𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 (3.11)
Ilustrasi untuk mencari momentum sudut seperti pada Gambar 3.5.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 42
Gambar 3.5. Momentum sudut benda
Dari definisi momentum sudut, apabila didefferensialkan menghasilkan:
𝑑𝑑𝑙𝑙𝑑𝑑𝑑𝑑
= 𝑑𝑑(𝑟𝑟𝑟𝑟𝑟𝑟 )𝑑𝑑𝑑𝑑
(3.12)
𝑑𝑑𝑙𝑙𝑑𝑑𝑑𝑑
= �𝑟𝑟 × 𝑑𝑑𝑟𝑟𝑑𝑑𝑑𝑑� + (𝑑𝑑𝑟𝑟
𝑑𝑑𝑑𝑑× 𝑟𝑟)
𝑑𝑑𝑙𝑙𝑑𝑑𝑑𝑑
= (𝑟𝑟 × 𝐹𝐹) + (𝑣𝑣 × 𝑚𝑚𝑣𝑣)
𝑑𝑑𝑙𝑙𝑑𝑑𝑑𝑑
= 𝜏𝜏 (3.13)
Berdasarkan pada persamaan tersebut, dapat dinyatakan bahwa laju perubahan momentum sudut terhadap waktu sebanding dengan torsi yang bekerja pada benda tersebut.
PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 43
BAB IV
Sistem Sensor POKOK BAHASAN:
1. Sensor Categories 2. Binary Sensor 3. Analog versus Digital Sensors 4. Shaft Encoder 5. A/D Converter 6. Position Sensitive Device 7. Compass 8. Gyroscope, Accelerometer, Inclinometer 9. Vision Sensor
TUJUAN BELAJAR: Setelah mempelajari materi dalam bab ini, mahasiswa diharapkan mampu:
• Memahami pengertian sensor dan penggunaan dalam sistem kendali • Menjelaskan jenis sensor yang ada di industri.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 44
4.1. Pendahuluan
Untuk menghasilkan performa yang optimal, hampir di berbagai divais elektronik digunakan sensor yang sesuai dengan hasil yang diinginkan. Menurut definisi sensor adalah suatu elemen atau piranti yang dapat mengubah besaran fisik (kecepatan, cahaya, tekanan) menjadi besaran elektrik, misal arus, tegangan, atau resistansi.
4.2. Kategori Sensor
Saat ini telah banyak tersedia berbagai macam sensor yang digunakan untuk menyelesaikan masalah tertentu. Di dalam dunia elektronik sensor dapat di kategorikan berdasarkan pada:
1. Aktivitas Berdasarkan aktivitas sensor, dikenal antara lain untuk keamanan, biomedical, agrikultur, industri, kontrol iklim, otomasi, dan otomotif.
2. Teknologi sensor dan prinsip pengukuran Pada kategori ini sensor terbagi menjadi berdasarkan pada teknologi:
• Akustik, seperti bimetallic, capacitive, chemical, conductivity, differential temperature, gyroscopic, dan masih banyak yang lain.
• Amperometric, di antaranya biological, doppler, electrostatic, field effect, hall, laser, magnetic, dan mechanical.
• AMR (anisotropic magnetoresistive), biometric, CCD, CMOS, differential pressure, dan lain-lain.
3. Aplikasi sensor menurut parameter yang diukur Berdasarkan kategori ini, sensor dibedakan atas aplikasi untuk:
• Posisi dan dimensi, seperti sensor sudut, inklinasi, kontur (2D/3D), posisi, GPS, jarak, topografi, ukuran, volome, dll.
• Mekanik atau dinamik, dibedakan atas akselerasi, akselerasi rotasi, dan akselerasi yang berkaitan dengan vibrasi.
• Tekanan, aliran, dan level

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 45
• Sensor yang dipergunakan untuk yang berkaitan dengan kimia, biologi, dan lingkungan
• Sensor yang ditujukan untuk yang berkaitan dengan temperatur, kelembaban, cuaca, dan lingkungan,
• Sensor yang berkaitan dengan tubuh, manusia, dan kedokteran, seperti fingerprint, bloodpressure, human identification, dll.
4.3. Sensor Biner (Binary Sensor)
Berdasarkan output yang dihasilkan, sensor dibedakan menjadi sensor biner dan sensor analog. Sensor biner menghasilkan dua output sinyal, yaitu status “on” dan status “off”. Status-status tersebut dikonversikan ke dalam bilangan biner 1 untuk “on” dan 0 untuk “off”. Untuk mendapatkan output biner, dapat menggunakan sistem threshold atau komparasi pada outputnya. Jenis sensor biner yang sering digunakan antara lain: • Sensor manual (push button), contoh normally open/closed contact dan
changeover contact. Sensor jenis ini memberikan logika “0” atau “1” selama penekakanan. Gambar sensor push button seperti pada Gambar 4.1.
Gambar 4.1. Push Button Sumber: Kilian, Christopher T, Modern Control Technology, (West Publishing
Co : 1996)

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 46
• Sensor batas (limit switch) Limit Switch adalah sensor peraba yang bersifat mekanis dan mendeteksi sesuatu setelah terjadi kontak fisik. Penggunaan sensor ini biasanya digunakan untuk membatasi gerakan maksimum sebuah mekanik. Contohnya pada penggerak lengan di mana limit switch akan aktif dan memberikan masukan pada CPU untuk menghentikan gerak motor di saat lengan sudah ditarik maksimum.Pada umumnya limit switch digunakan untuk mengetahui ada tidaknya suatu obyek di lokasi tertentu. Gambar 4.2. merupakan bentuk-bentuk dari sensor limit switch
Gambar 4.2. Limit Switch Sumber: Kilian, Christopher T, Modern Control Technology,
(West Publishing Co : 1996)
• Sensor proximity Sensor ini biasanya digunakan untuk mendeteksi ada atau tidak nya suatu objek, tanpa melakukan kontak fisik. Jenis sensor proximity meliputi limit switch (saklar mekanik), ultrasonic proximity, infra merah, kamera dan lain sebagainya. Contoh sensor proximity jenis infra merah seperti pada Gambar 4.3.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 47
Gambar 4.3. Sensor Infra Red Proximity
Sumber: http://2.bp.blogspot.com/IR_proximity.jpg
4.4. Sensor Analog
Setelah mengenal sensor biner, tentu dengan mudah kita dapat mendefinisikan sensor analog. Sensor analog merupakan sensor yang mengukur atau menentukan informasi kontinyu. Dengan kata lain sensor analog merupakan sensor yang dapat membangkitkan atau menghasilkan perubahan sinyal elektrik berupa perubahan arus atau perubahan tegangan. Contoh dari sensor analog antara lain adalah LDR (sensor cahaya) yang memonitor jumlah intensitas cahaya, sensor untuk mengukur temperatur, jarak dan tekanan.
Gambar 4.4. Sensor cahaya (LDR)
Sumber: http://vegasuz.wordpress.com

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 48
4.5. Sensor Analog vs Sensor Digital
Pada dasarnya penggunaan sensor sangat bergantung pada permasalahan yang ingin diselesaikan. Pemilihan sensor yang tepat menghasilkan unjuk kerja yang lebih optimal. Berdasarkan pada dua kategori sensor (analog dan digital) dapat disarikan seperti tabel 4.1 berikut:
Tabel 4.1. Sensor Analog versus Sensor Digital SENSOR OUT PUT APLIKASI Analog • Berupa tegangan (0-5)
volt • Berupa arus (4-20) mA
Sensor temperatur, sensor cahaya, sensor accelerometer
Digital • 2 kondisi: “1” dan “0” Dapat menggunakan thresholding untuk membatasi output • Pulsa (PWM)
Limit Switch, Infra Red Giroskop Digital
4.6. Shaft Encoder
Shaft encoder, sering disebut juga dengan rotary encoder, merupakan divais elektro mekanik yang berfungsi mengubah atau mengkonversi posisi gerakan angular dari batang atau pangkal ke dalam kode analog atau digital. Output deret sensor ini berupa informasi gerak seperti kecepatan, jarak, RPM, dan posisi, sedangkan output absolut menunjukkan arus dari posisi shaft. Encoder ini banyak digunakan di berbagai aplikasi yang membutuhkan ukuran yang presisi, seperti robotik,lensa fotografi, trackball, pengendali tekanan (rheometer), dan radar.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 49
Gambar 4.5. Rotary Encoder
Sumber: http://en.wikipedia.org/wiki/File:Gray_code_rotary_encoder_13-track_opened.jpg
4.7. A/D Converter
A/D Converter atau Analog to Digital converter berfungsi sebagai pengubah sinyal/data analog menjadi sinyal/data digital. Biasanya oputput dari ADC ini masuk ke dalam komponen digital seperti mikrokontroller. Terdapat dua input ADC, yaitu input positif (+) dan input negatif (-). Sebagai contoh ADC 0804 yang terdiri dari 8 bit microprocessor Analog to Digital Converter. V(+) dan V(-) merupakan input tegangan analog differensial, sehingga data tegangan yang diproses adalah selisih dari kedua tegangan tersebut. Vref merupakan tegangan referensi ADC yang digunakan untuk mengatur tegangan input pada Vi+ dan Vi-. Besar tegangan referensi adalah setengah dari tegangan input maksimum, ini bertujuan agar pada saat input maksimum data digital juga maksimum. Frekuensi clock dapat diatur dengan menggunakan komponen R dan C eksternal pada pin Rclk dan Cclk, dengan mengikuti persamaan:
𝐹𝐹𝑐𝑐𝑐𝑐𝑐𝑐 = 11,1𝑅𝑅𝑅𝑅 (4.1)

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 50
Chip select berfungsi untuk mengaktifkan ADC yang diaktifkan dengan logika low. Read adalah input yang digunakan untuk membaca data digital hasil konversi yang aktif pada kondisi low, sedangkan Write berfungsi untuk memulai konversi ADC yang diaktifkan pada kondisi low. Instruksi berfungsi utnuk mendeteksi apakah konversi sudah selesai atau masih berlangsung, jika sudah selesai maka pin instruksi mengeluarkan logika low. Output berupa digital sebanyak 8 byte (DB0-DB7), dengan biner dari 0000 0000 sampai dengan 1111 1111, dengan demikian bilangan decimal yang muncul berkisar dari 0 sampai dengan 255, diambil dari pin D0 sampai D7.
Gambar 4.6. ADC0804
4.8. Positive Sensitive Device
Positive sensitive device merupakan fotodiode sederhana, yaitu sensor posisi bersifat optik yang dapat mengukur atau mendeteksi seberkas cahaya yang jatuh di permukaan sensor. Posisi dihitung dari besar (magnitudo) signal photocurrent yang dikandung PSD.PSD terdiri atas sebuah photodiode PIN monolitik dengan resistansi uniform, baik satu atau dua dimensi. PSD memiliki banyak keuntungan dibanding Discrete Element Detector, yaitu memiliki resolusi tinggi, respon yang tinggi, dan rangkaian operasi yang sederhana. Salah satu aplikasi PSD ini adalah untuk penjejakan objek (optical tracking object).

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 51
(a) Sumber: http://sirad.pd.infn.it Sumber: (b) www.aculux.com
Gambar 4.7. Sensor PSD (a) dan Disain Sensor PSD (b)
4.9. Compass Sensor
Sensor compass merupakan alat yang dapat digunakan untuk navigasi atau penunjuk arah. Salah satu sensor tersebut adalah modul magnetic compass CMPS03. Modul ini sering digunakan dalam membuat robot yang berfungsi untuk memberikan referensi keberadaan robot dan arah dari robot tersebut, kemudian posisi dan arah yang telah ditentukan dijadikan acuan untuk gerakan robot selanjutnya. Modul Magnetic Compass menggunakan jalur komunikasi data 12C ke mikrokontroller.
(a) (b)
Gambar 4.8. Modul CMP03 (a), dan Rangkaian aplikasi modul CMP03 (b)

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 52
4.10. Gyroscope, Accelerometer, Inclinometer 4.10.1. Gyroscope
Giroskop (Gyroscope) adalah alat yang memiliki prinsip kerja yang sama dengan prinsip kerja sebuah gasing. Gasing berputar pada sumbunya untuk menjaga gerak rotasi agar tetap seimbang. Pada kapal dan pesawat, girokompas digunakan untuk navigasi. Giroskop dipasang khusus sehingga tidak terpengaruh pada berputarnya kapal atau pesawat. Selain itu giroskop juga digunakan untuk menjaga peralatan navigasi agar tetap stabil. Giroskop yang berputar selalu berusaha untuk tetap mengarah pada arah yang ditentukan sehingga perputaran tetap seimbang, Inilah yang disebut dengan gaya giroskopik. Contoh aplikasi giroskop adalah pada ban sepeda atau motor. Ban dapat terus seimbang berputar karena pengaruh gaya giroskopik.
Gambar 4.9. Giroskop
Sumber: http://en.wikipedia.org/wiki/File:3D_Gyroscope.png
4.10.2. Accelerometer
Accelerometer merupakan sensor yang berfungsi untuk mengukur percepatan, mendeteksi dab mengukur adanya getaran. Sensor ini juga dapat digunakan untuk mengukur percepatan akibat gravitasi bumi. Prinsip kerja accelerometer mengikuti hukum fisika, yaitu seperti peristiwa timbulnya medan magnet. Bila medan magnet digerakkan melalui komduktor, maka timbul tegangan induksi pada

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 53
accelerometer tersebut, sehingga dapat dilakukan pengukuran percepatan. Bentuk sensor accelerometer ditunjukkan pada Gambar 4.10.
Gambar 4.10. Accelerometer
Sumber: www. ai.ia.agh.edu.pl
4.10.3. Inclinometer
Inclinometer atau clinometer adalah instrumen yang digunakan untuk mengukur kemiringan atau sudut kemiringan objek yang berkaitan dengan gravitasi. Sensor ini dapat digunakan pada kamera, pengendali pesawat terbang, sistem keamanan mobil dan lain sebagainya. Contoh inclinometer seperti ilustrasi gambar 4.11.
Gambar 4.11. Inclinometer
Sumber: www. shzhichuan.51ev.org

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 54
4.11. Sensor Vision
Saat ini pada aplikasi robot banyak sekali penggunaan sensor vision, demikian juga pada mekatronika. Sensor vision erat kaitannya dengan pendeteksian atau pengenalan suatu objek, sehingga di dalamnya terkandung sistem kecerdasan buatan (AI), yang digunakan sebagai pengambilan keputusan. Dengan demikian sensor vision dapat dinyatakan sebagai sensor yang berfungsi menganalisis citra (image) untuk pengenalan atau pendeteksian objek, pengenalan karakter, pendeteksian posisi, dan pendeteksian kerusakan atau cacat. Terdapat setidaknya 13 macam poduk sensor vision, antara lain sensor untuk menentukan posisi, sensor untuk penjejakan (tracking), dan sensor camera. Gambar 4.12. adalah berbagai bentuk fisik dari sensor vision:
Sensor jenis FQ Jenis FZ3 Jenis FL Jenis FQ-M Jenis FZM1
Gambar 4.12. Berbagai jenis sensor vision Sumber: http://www.ia.omron.com/product/29.html

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 90
BAB 6
SISTEM KONTROL POKOK BAHASAN: 1. Pengenalan Sistem Kontrol 2. Jenis – Jenis Sistem Kontrol
a. Logic Control b. On-Off Control c. Linear Control : PID d. Fuzzy Logic e. PLC
TUJUAN BELAJAR: Setelah mempelajari materi dalam bab ini, mahasiswa diharapkan mampu:
1. Memahami jenis-jenis system control 2. Mengaplikasikan jenis-jenis system control pada robotic
6.1. Pengenalan Sistem Kontrol Istilah "sistem kontrol" dapat diterapkan dengan kontrol manual yang memungkinkan dasarnya operator, misalnya, untuk menutup dan membuka tekan hidrolik, mungkin termasuk logika sehingga tidak dapat dipindahkan kecuali penjaga keselamatan di tempat. Sebuah sistem kontrol otomatis sekuensial dapat memicu serangkaian aktuator mekanik dalam urutan yang benar untuk melakukan tugas. Misalnya berbagai transduser listrik dan pneumatik dapat lipat dan lem kotak karton, mengisinya dengan produk dan kemudian segel dalam sebuah mesin kemasan otomatis.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 91
Kontrol otomatik telah memainkan peranan penting dalam sains dan rekayasa modern. Disamping untuk kepentingan khusus seperti space-vehicle system, missile-guidance system, robotic system, kontrol otomatik telah menjadi bagian integral yang penting dalam manufaktur modern dan industri proses. Sebagai contoh, kontrol otomatik merupakan esensi dalam numerical control mesin-mesin presisi pada industri manufaktur, disain sistem auto pilot pada industri penerbangan, disain mobil dalam industri otomotif. Juga dapat diterapkan pada operasi-operasi industri seperti mengontrol tekanan, temperatur, kelembaban, viskositas, aliran dalam industri proses. Beberapa istilah yang banyak digunakan:
• Controlled Variable: kuantitas atau kondisi yang diukur dan dikontrol • Manipulated Variable: kuantitas atau kondisi yang divariasikan oleh
pengontrol sehingga mempengaruhi variabel yang dikontrol. Biasanya variabel yang dikontrol adalah output dari sistem. Kontrol dapat berarti mengukur controlled variable dari sistem dan menerapkan manipulated variable pada sistem untuk mengoreksi dan membatasi deviasi harga terukur (output) dari harga yang diinginkan.
• Plant: Obyek yang akan dikontrol • Proses: Operasi dan pengembangan kontinu yang ditandai oleh
perubahan gradual dari variabelnya dengan cara tertentu sehingga sampai pada suatu hasil atau keadaan tertentu.
• Sistem: Kombinasi dari berbagai komponen yang beraksi bersama-sama dan menghasilkan suatu performansi tertentu.
• Gangguan: Sinyal yang mempengaruhi sistem sehingga mempengaruhi harga output dari harga yang diinginkan.
Dalam kasus sistem umpan balik linear, loop kontrol, termasuk kontrol algoritma sensor, dan aktuator, diatur sedemikian rupa untuk mencoba untuk mengatur variabel di sebuah setpoint atau nilai referensi. Sebuah contoh dari ini dapat meningkatkan pasokan bahan bakar ke tungku ketika suhu diukur tetes. PID kontroler yang umum dan efektif dalam kasus-kasus seperti ini. Kontrol sistem yang mencakup beberapa penginderaan dari hasil yang mereka

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 92
capai yang membuat penggunaan umpan balik dan sehingga dapat, sampai batas tertentu, beradaptasi dengan berbagai keadaan. Loop terbuka sistem kontrol tidak menggunakan umpan balik, dan berjalan hanya dalam pre arrange way. 6.2. Jenis – Jenis Sistem Kontrol Ada beberapa jenis system control yang dapat digunakan pada mekatronika robotic, diantaranya; logic control, on-off control, linear control (PID), Fuzzy logic, dan Proggramable Logic Control (PLC). 6.2.1. Logic Control Sistem kontrol logika untuk mesin industri dan komersial secara historis diterapkan pada relay tegangan listrik menggunakan saling berhubungan, dirancang dengan menggunakan logika tangga. Saat ini, kebanyakan sistem tersebut dibangun dengan programmable logic controller (PLC) atau mikrokontroler. Notasi logika tangga masih digunakan sebagai idiom pemrograman untuk PLC. Logic controller dapat menanggapi switch, sensor cahaya, saklar tekanan, dll, dan dapat menyebabkan mesin untuk memulai dan menghentikan berbagai operasi. Sistem logika digunakan untuk operasi urutan mekanik di banyak aplikasi. PLC perangkat lunak dapat ditulis dalam berbagai cara - diagram tangga, SFC -. Grafik fungsi sekuensial atau dalam istilah bahasa yang dikenal sebagai daftar pernyataan Contoh termasuk lift, mesin cuci dan sistem lain dengan saling menghentikan operasi-pergi. Sistem logika yang cukup mudah untuk merancang, dan dapat menangani operasi yang sangat kompleks. Beberapa aspek dari desain sistem logika menggunakan logika Boolean. 6.2.2. On – Off Control Pada sistem kontrol dua posisi, elemen aktuasi hanya mempunyai dua posisi yang tetap. Kontrol on-off ini banyak digunakan di industri karena murah dan sederhana. Sinyal control akan tetap pada satu keadaan dan akan berubah ke keadaan lainnya bergantung pada nilai error positif atau negatif.
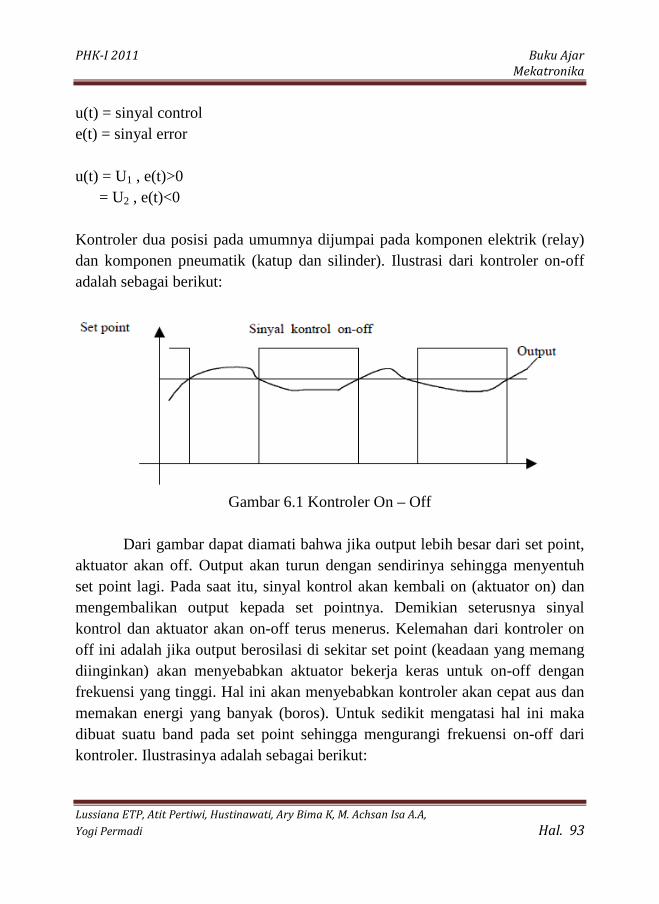
PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 93
u(t) = sinyal control e(t) = sinyal error u(t) = U1 , e(t)>0 = U2 , e(t)<0 Kontroler dua posisi pada umumnya dijumpai pada komponen elektrik (relay) dan komponen pneumatik (katup dan silinder). Ilustrasi dari kontroler on-off adalah sebagai berikut:
Gambar 6.1 Kontroler On – Off
Dari gambar dapat diamati bahwa jika output lebih besar dari set point, aktuator akan off. Output akan turun dengan sendirinya sehingga menyentuh set point lagi. Pada saat itu, sinyal kontrol akan kembali on (aktuator on) dan mengembalikan output kepada set pointnya. Demikian seterusnya sinyal kontrol dan aktuator akan on-off terus menerus. Kelemahan dari kontroler on off ini adalah jika output berosilasi di sekitar set point (keadaan yang memang diinginkan) akan menyebabkan aktuator bekerja keras untuk on-off dengan frekuensi yang tinggi. Hal ini akan menyebabkan kontroler akan cepat aus dan memakan energi yang banyak (boros). Untuk sedikit mengatasi hal ini maka dibuat suatu band pada set point sehingga mengurangi frekuensi on-off dari kontroler. Ilustrasinya adalah sebagai berikut:

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 94
Gambar 6.2. Frekuensi Kontroler On-Off
Sinyal kontrol akan off ketika output menyentuh batas atas dan baru on kembali ketika menyentuh batas bawah. Band dari set point ini disebut juga diferensial gap. Dengan keadaan seperti ini serta mengatur besarnya diferensial gap maka frekuensi on-off dapat dikurangi tetapi harus dibayar dengan penurunan akurasi terhadap set point. 6.2.3. Linear Control (PID) Operasi jangka panjang dari sistem apapun, besar atau kecil, mensyaratkan bahwa harus ada keseimbangan massa / energi antara masukan dan output. Jika proses dioperasikan pada ekuilibrium di setiap saat, kontrol akan sederhana. Karena perubahan tidak ada, yang penting parameter dalam kontrol proses adalah WAKTU, yaitu berapa lama waktu yang dibutuhkan untuk perubahan dalam input apapun untuk muncul dalam output. Sistem konstanta waktu dapat bervariasi dari sepersekian detik untuk berjam-jam. Kontroler PID adalah jenis yang paling banyak digunakan dari proses kontroler. Ini adalah kemampuan untuk menyempurnakan tindakan kontrol ke spesifik konstanta waktu proses dan oleh karena itu untuk menangani proses perubahan dari waktu ke waktu yang telah menerima kontroler PID penerimaan luas. Untuk mengukur output atau bentuk penyimpangan, apa yang diinginkan yang untuk mengukur perbedaan (kesalahan). Cara yang paling umum mengukur dan mengurangi kesalahan apapun adalah melalui kritik,

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 95
yang teknik pengukuran output dan makan kembali ke kontroler. Fungsi controller proses untuk menyesuaikan variabel proses input untuk menghilangkan kesalahan itu. PID kontroler yang paling sering jenis kontroler dipilih untuk melakukan hal ini.
Gambar 6.3. Blok Diagram Sistem Konrol PID
Proportional control Hubungan antara sinyal kontrol dan error adalah: u(t) = Kpe(t) Fungsi transfer dalam domain s:
Proportional controller tidak lain adalah amplifier dengan penguatan sebesar Kp. Kata proportional mempunyai arti bahwa besarnya aksi kontrol sesuai dengan besarnya error dengan faktor pengali tertentu. Kelemahan dari aksi kontrol ini adalah terdapatnya steady state error yaitu output mempunyai selisih terdapat set point. Integral control Pada pengontrol ini, kecepatan perubahan sinyal kontrol sebanding dengan sinyal error.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 96
, Fungsi transfer dalam domain s:
Jika e(t) diduakalikan, maka kecepatan perubahan u(t) adalah dua kali semula. Selama sinyal error masih ada, maka sinyal kontrol akan beraksi terus. Ketika sinyal error nol, u (t) tetap stasioner. Dengan demikian, aksi kontrol integral akan menghilangkan steady state error. Artinya output sistem akan selalu mengejar set point sedekat mungkin. Aksi kontrol integral sering disebut automatic reset control. Kerugian dari aksi kontrol ini adalah terjadi osilasi sehingga mengurangi kestabilan sistem. Proportional plus integral control
Fungsi transfer dalam domain s:
Kp adalah gain proporsional, Ti adalah integral time. Integral time mengatur aksi control integral sedangkan Kp akan mempengaruhi baik bagian integral maupun proporsional. Kebalikan dari Ti disebut reset rate yang artinya jumlah waktu per menit dimana bagian proporsional dari aksi kontrol diduplikasi. Proportional plus derivative control
Fungsi transfer dalam domain s:

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 97
Td adalah derivative time. Aksi kontrol derivative sering disebut rate control karena kecepatan perubahan error sebanding dengan sinyal kontrol. Artinya, apabila ada perubahan error, maka sinyal kontrol beraksi. Aksi kontrol ini memberikan respon terhadap perubahan sinyal error dan mampu mengoreksinya sebelum error bertambah besar. Aksi kontrol ini mampu mengantisipasi error, mempercepat respon sistem dan meningkatkan stabilitas sistem. Dengan demikian, apabila ada gangguan tiba-tiba, output akan berubah secara tiba-tiba menjauhi set point, menghasilkan perubahan error. Perubahan error yang tiba-tiba akan menghasilkan sinyal kontrol antisipasi sebelum error bertambah besar dan berusaha mengembalikan ke keadaan steady. Kekurangan dari aksi ini adalah terdapat steady state error karena error yang konstan tidak akan menghasilkan sinyal kontrol (sistem yang sudah steady tidak menghasilkan aksi kontrol walaupun jauh dari set point). Proportional plus integral plus derivative control Ini adalah kombinasi dari ketiga aksi kontrol:
Dalam bentuk fungsi transfer
Aksi kontrol gabungan seperti ini menghasilkan performansi serta keuntungan gabungan dari aksi kontrol sebelumnya. PID mempunyai karakteristik reset control dan rate control yaitu meningkatkan respon dan stabilitas sistem serta mengeliminasi steady state error.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 98
6.2.4. Fuzzy Logic
Fuzzy Logic adalah metodologi pemecahan masalah dengan beribu – ribu aplikasi dalam pengendali yang tersimpan dan pemrosesan informasi. Fuzzy logic menyediakan cara sederhana untuk menggambarkan kesimpulan pasti dari informasi yang ambigu, samar – samar, atau tidak tepat. Sedikit banyak, fuzzy logic menyerupai pembuatan keputusan pada manusia dengan kemampuannya untuk bekerja dari data yang ditafsirkan dan mencari solusi yang tepat. Fuzzy logic pada dasarnya merupakan logika bernilai banyak (multivalued logic) yang dapat mendefinisikan nilai diantara keadaan konvensional seperti ya atau tidak, benar atau salah, hitam atau putih, dan sebagainya. Penalaran fuzzy menyediakan cara untuk memahami kinerja dari system dengan cara menilai input dan output system dari hasil pengamatan. Dasar – Dasar Logika Fuzzy Fungsi keanggotaan dari suatu himpunan fuzzy dinyatakan dengan derajat keanggotaan suatu nilai terhadap nilai tegasnya yang berkisar antara 0,0 sampai dengan 1,0. Jika A: himpunan fuzzy, μA: fungsi keanggotaan dan X : semesta, maka fungsi keanggotaan dalam suatu himpunan fuzzy dapat dinyatakan dengan: A={(x,μA(x))|xЄX} Fungsi Keanggotaan suatu himpunan fuzzy dapat ditentukan dengan fungsi segitiga (Triangle),trapesium (Trapezoidal) atau Fungsi Gauss (Gaussian). Persamaan fungsi keangotaan segitiga adalah:

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 99
Persamaan tersebut dalam bentuk grafik ditunjukkan pada gambar berikut:
Gambar 6.4. Fungsi Kenaggotaan Segitiga
Persamaan fungs i keangotaan Trapes ium adalah:
Persamaan tersebut dalam bentuk grafik ditunjukkan pada gambar berikut:

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 100
Gambar 6.5. Fungsi Keanggotaan Trapesium
Persamaan fungs i keangotaan Gauss ian adalah
Persamaan tersebut dalam bentuk grafik ditunjukkan pada gambar berikut:
Gambar 6.5. Fungs i keanggotaan Gauss ian
Cara Kerja Kontrol logika fuzzy Dalam system control logika fuzzy terdapat beberapa tahapan operasional yang meliputi:
1. Fuzzyfikasi 2. Penalaran (Inference Machine) 3. Aturan Dasar (Rule Based) 4. Defuzzyfikas i
Blok diagram control logika fuzzy d itunjukkan pada gambar berikut:

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 101
Gambar 6.6. Diagram Kontrol Logika Fuzzy Kerangka operas ional control logika fuzzy ditunjukkan pada gambar berikut:
Gambar 6.7. Alur Kerja Kontrol Logika Fuzzy
Dari gambar 6.7. s inyal masukan dari KLF dapat berupa nilai tegas. Sinyal masukan KLF dapat diamb ilkan dari:
a) Selis ih antara rujukan (reference) dengan nilai keluaran

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 102
nyata dari KLF yang berupa nilai kesalahan (error=E). b) Turunan pertama dari nilai error yang d ikenal dengan delta
error=dE Fuzzyfikasi Fuzzifikasi adalah suatu proses pengubahan nilai tegas/real yang ada ke dalam fungsi keanggotaan Misal: merujuk pada gambar 6.8. fuzzifikasi dari suhu 35oC adalah:
Gambar 6.9. Fungs i Fuzzyfikasi suatu sinyal
Defuzzifikasi Merupakan proses pemetaan himpunan fuzzy ke himpunan tegas (crips). Proses ini merupakan kebalikan dari proses fuzzyfikasi. Proses defuzzyfikas i diekspres ikan sebagai berikut : Z* = defuzzifier (Z) Z = Hasil penalaran fuzzy Z* = Keluaran Kontrol FL Defuzzifier = Operasi defuzzier 6.2.5. Programmable Logic Control (PLC) PLC (kepanjangan Programmable Logic control) adalah sebuah alat yang digunakan untuk menggantikan rangkaian sederetan relay yang dijumpai pada sistem kontrol proses konvensional. PLC bekerja dengan cara mengamati masukan (melalui sensor-sensor terkait), kemudian melakukan proses dan melakukan tindakan sesuai yang dibutuhkan, yang berupa menghidupkan atau mematikan keluarannya (logika 0 atau 1, hidup atau mati). Pengguna membuat program (yang umumnya dinamakan diagram tangga atau ladder diagram )

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 103
yang kemudian harus dijalankan oleh PLC yang bersangkutan, Dengan kata lain, PLC menentukan aksi apa yang harus dilakukan pada instrumen keluaran berkaitan dengan status suatu ukuran atau besaran yang diamati. Program kendali PLC terdiri atas tiga unsur yaitu: alamat, instruksi, dan operand. Alamat adalah nomor yang menunjukkan lokasi, instruksi, atau data dalam daerah memori. Instruksi harus disusun secara berurutan dan menempatkannya dalam alamat yang tepat sehingga seluruh instruksi dilaksanakan mulai dari alamat terendah hingga alamat tertinggi dalam program. Instruksi adalah perintah yang harus dilaksanakan PLC. PLC hanya dapat melaksanakan instruksi yang ditulis menggunakan ejaan yang sesuai. Oleh karena itu, pembuat program harus memperhatikan tata cara penulisan instruksi. Operand adalah nilai berupa angka yang ditetapkan sebagai data yang digunakan untuk suatu instruksi. Operand dapat dimasukkan sebagai konstanta yang menyatakan nilai angka nyata atau merupakan alamat data dalam memori. Bahasa Pemrograman Program PLC dapat dibuat dengan menggunakan beberapa cara yang disebut bahasa pemrograman. Bentuk program berbeda-beda sesuai dengan bahasa pemrograman yang digunakan. Bahasa pemrograman tersebut antara lain: diagram ladder, kode mneumonik, diagram blok fungsi, dan teks terstruktur. Beberapa merk PLC hanya mengembangkan program diagram ladder dan kode mneumonik. Diagram Ladder Diagram ladder terdiri atas sebuah garis vertikal di sebelah kiri yang disebut bus bar, dengan garis bercabang ke kanan yang disebut rung. Sepanjang garis instruksi, ditempatkan kontak-kontak yang mengendalikan/mengkondisikan instruksi lain di sebelah kanan. Kombinasi logika kontak-kontak ini menentukan kapan dan bagaimana instruksi di sebelah kanan dieksekusi. Contoh diagram ladder ditunjukkan pada gambar di bawah ini.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 104
Gambar 6.10. Contoh Diagram Ladder
Terlihat dari gambar di atas bahwa garis instruksi dapat bercabang kemudian menyatu kembali. Sepasang garus vertikal disebut kontak (kondisi). Ada dua kontak, yaitu kontak NO (Normally Open) yang digambar tanpa garis diagonal dan kontak NC (Normally Closed) yang digambar dengan garis diagonal. Angka di atas kontak menunjukkan bit operand. Kode Mneumonik Kode mneumonik memberikan informasi yang sama persis seperti halnya diagram ladder. Sesungguhnya, program yang disimpan di dalam memori PLC dalam bentuk mneumonik, bahkan meskipun program dibuat dalam bentuk diagram ladder. Oleh karena itu, memahami kode mneumonik itu sangat penting. Berikut ini contoh program mneumonik:

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 105
Tabel 6.1. Contoh Program Mnemonic
Alamat Instruksi Operand 00000 LD HR 01 00001 AND 0.01 00002 OR 0.02 00003 LD NOT 0.03 00004 OR 0.04 00005 AND LD 00006 MOV(21) 0.00 DM 00 00007 CMP(20) DM (00) HR (00)
Struktur Daerah Memori Program pada dasarnya adalah pemrosesan data dengan berbagai instruksi pemrograman. Data disimpan dalam daerah memori PLC. Pemahaman daerah data, disamping pemahaman terhadap berbagai jenis instruksi merupakan hal yang sangat penting, karena dari segi inilah intisari pemahaman terhadap program. Data yang merupakan operand suatu instruksi dialokasikan sesuai dengan jenis datanya. Tabel di bawah ini ditunjukkan daerah memori PLC CPM2A sebagai berikut:
Tabel 6.2. Memori PLC Daerah Data Channel IWord Bit
IR Daerah Input IR 000 sd IR 009 IR 010 sd IR 019
IR 000.00 sd IR 009.15
Daerah Output IR 010.00 sd IR 019.15
Daerah ‘Kerja’ IR 010 sd 049
IR 020.00 sd IR 049.15

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 106
IR 200 sd IR 227 IR 200.00 sd IR 227.15
SR SR 228 sd 255 SR 228 sd SR 255.15 TR -- TR 0 sd TR 7 HR HR 00 sd HR 19 HR 00.00 sd HR
19.15 AR AR 00 sd AR 23 AR 00 sd AR 23.15 LR LR 00 sd LR 15 LR 00.00 sd LR 15.15 TIM! CNT TC 000 sd C 255 Instruksi Pemrograman Terdapat banyak instruksi untuk memrogram PLC, tetapi tidak semua instruksi dapat digunakan pada semua model PLC. Instruksi pemrograman dapat dikelompokkan sebagai berikut: Klasifikasi menurut pengkodean mneumonik:
• Instruksi dasar • Instruksi khusus
Klasifikasi menurut kelompok fungsi: • Instruksi sisi kiri (ladder) • Instruksi sisi kanan Klasifikasi menurut kelompok fungsi: • Instruksi ladder • Instruksi kendali bit • Instruksi timer/counter • Instruksi geser bit • Instruksi sub routine • Instruksi ekspansi
Pada dasarnya, tingkat pemahaman pemakai PLC ditentukan oleh seberapa banyak instruksi yang telah dipahaminya. Oleh karena itu, untuk pemula berikut ini hanya dijelaskan beberapa instruksi saja. Untuk pendalaman lebih lanjut dapat mempelajari manual pemrograman yang diterbitkan oleh pemilik merk PLC.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 107
Instruksi Diagram Ladder Instruksi diagram ladder adalah instruksi sisi kiri yang mengkondisikan instruksi lain di sisi kanan. Pada program diagram ladder instruksi ini disimbolkan dengan kontak-kontak seperti pada rangkaian kendali elektromagnet. Instruksi diagram ladder terdiri atas enam instruksi ladder dan dua instruksi blok logika. Instruksi blok logika adalah instruksi yang digunakan untuk menghubungkan bagian yang lebih kompleks. Instruksi LOD dimulai dengan barisan logic yang dapat diteruskan menjadi ladder diagram rung. Instruksi LOD digunakan setiap kali rung baru dimulai.
Diagram Ladder ( relay circuit )
List Program Address Instruction Word Data 0 LOD 0 1 - -
Key Operation
Instruksi AND
• Instruksi AND digunakan untuk membuat program kontak sirkuit seri. • Instruksi AND dimasukan sebelum set yang kedua yang berhubungan
dan selanjutnya • Dapat dilanjuti dengan instruksi NOT untuk contact normally closed

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 108
Gerbang Logic AND
Tabel kebenaran gerbang AND Input 1 Input 2 Input 3 OFF OFF OFF ON OFF OFF OFF ON OFF ON ON ON
Diagram Ladder (relay circuit)
List Program
Address Instruction Word Data 0 LOD 0 1 AND 1
Key Operation

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 109
Intruksi OR
• Instruksi OR digunakan untuk memprogram parallel contact circuit • Instruksi OR dimasukan sebelum set kedua dan selanjutnya • Instruksi ini dapat diikuti oleh instruksi NOT pada contact normaly
closed Gerbang Logic OR
Tabel Kebenaran Gerbang OR
Input 1 Input 2 Input 3 OFF OFF OFF ON OFF ON OFF ON ON ON ON ON
Diagram Ladder (relay circuit)
List Program
Address Instruction Word Data 0 LOD 0 1 OR 1

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 110
Key Operation
Instruksi AND LOD
• Instruksi AND LOD digunakan untuk menyambung dua atau lebih circuit seri yang di mulai dengan LOD ins truction.
• Instr uksi AND LOD sama dengan NODE pada ladder program. • Instr uksi AND LOD di mas ukan setelah memas ukkan circuit-circuit
yang akan disambung. Gerbang Logic AND LOD
Diagram Ladder (relay circuit)
AND LOD

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 111
List Program
Address Instruction Word Data 0 LOD 1 1 LOD 2 2 OR 3 3 AND LOD
Key Operation
Instruksi OR LOD
• Instruksi OR LOD digunakan untuk menyambung dua atau lebih circuit parallel yang dimulai dengan LOD instruction
• Instruksi OR LOD sama dengan NODE pada ladder diagram • Instruksi OR LOD dimasukan setelah memasukkan circuit yang akan
disambung

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 112
Gerbang Logic OR LOD
Diagram Ladder (relay circuit)
List Program
Address Instruction Word Data 0 LOD 1 1 AND 2 2 LOD 3 3 AND 4 4 OR LOD

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 113
Key Operation
Instruksi NOT • Instruksi NOT digunakan sebelum memasukan input address untuk
menyatakan kontak yang normaly closed • Instruksi NOT membuat pembacaan input menjadi kebalikannya • Instruksi ini dapat dimasukan setelah memasukkan instruksi LOD,
AND, OR Gerbang Logic NOT
Tabel Kebenaran Gerbang NOT
Input Output

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 114
OFF ON ON OFF
Diagram Ladder (relay circuit)
List Program
Address Instruction Word Data 0 LOD NOT 0 1 - -
Key Operation
Instruksi SET & RST
• Instruksi SET &RST digunakan untuk mengaktifkan atau mereset output dan internal relay
• Hanya memerlukan satu address • Output yang sama dapat di set dan reset berkali-kali dalam satu
program • Beroperasi pada setiap scan waktu input ON
Diagram Ladder (relay circuit)

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 115
List Program
Address Instruction Word Data 0 LOD 1 1 SET 00 2 LOD 2 3 SET 00 Key Operation
Timing SET & RST Instruction

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 116
Instruksi TIM (TIMER)
• 100-msec, Time down timer • Selalu diperlukan dua address • Instruksi timer dimasukkan pada address pertama yang diikuti oleh
nomer timer • Nilai preset dimasukan pada address kedua, preset timer antara 0
sampai 9999 • Nomer timer, T 0 sampai T 79
Diagram Ladder (relay circuit)
List Program

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 117
Address Instruction Word Data 0 LOD 1 1 TIM 5 2 50 3 OUT 00 Key Operation
Timing Chart
• Diagram Ladder
• Timing Chart
Persyaratan Instruksi Timer:

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 118
• Time down dari nilai yang telah ditentukan akan dimulai setelah timer input aktif.
• Output dari timer akan menyala jika nilai angka mencapai nol. • Nilai waktu kembali ke setting awal jika timer input mati. • Nomor timer yang sama tidak dapat di program lebih dari sekali, jika
dicoba maka akan ERROR MESSAGE. • Nilai preset timer dapat diubah tanpa harus mentransfer seluruh
program ke memory pack lagi. Jika nilai timer diubah pada waktu time down, perubahan akan mulai efektif pada siklus yang berikutnya.
• Jika nilai preset timer diubah menjadi nol, timer akan menghentikan operasi dan timer output akan langsung aktif.
Instruksi CNT (Counter) Adding (UP) Counter Persyaratan:
• Tersedia 100 Counter tambahan. • Counter di program dalam urutan RESET INPUT, PULSE INPUT dan
CNT. • Nilai preset Counter adalah 0 sampai 9999. • Dua address diperlukan, pertama untuk instruksi counter, kedua untuk
nilai presetnya. • Nomor Counter yang sama tidak dapat di program lebih dari sekali. • Ketika reset OFF, counter menghitung pulse input yang dibandingka
dengan nilai preset. • Ketika nilai terhitung mencapai nilai preset, output aktif dan tetap aktif
sampai reset itu dinyalakan. • Ketika input reset berubah dari OFF ke ON, nilai Counternya
terulang/reset. • Ketika reset input ON semua pulse input diabaikan. • Jika power mati, nilai counter dapat dipertahankan dengan
menggunakan konfigurasi CPU FUN7. • Nilai Counter preset dapat diubah tanpa mentransfer seluruh program
kembali.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 119
• Input reset mempunyai prioritas diatas input pulse. Satu scan setelah preset input akan mengubah dari ON ke OFF, counter akan mulai menghitungpulse input setelah berubah dari OFF ke ON.
List Program
Address Instruction Word Data 0 LOD 1 1 LOD 2 2 CNt 1 3 5

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 120
Key Operation
Timing Chart
Instruksi OUT
• Instruksi OUT akan mengakhiri logic Line yang berhubungan dengan ladder diagram baris
• Internal relay IR dapat digunakan dengan instruksi OUT Diagram Ladder (Relay Circuit)

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 121
List Program
Address Instruction Word Data 0 LOD 0 1 OUT 00 2 LOD NOT 1 3 OUT 01
Key Operation
Counter Reversible 1. Dual-pulse reversible Counter (CNT 45) 2. Up/Down selection Reversible Counter (CNT 46)
Persyaratan DUA L-PULSE REVERSIBLE COUNTER CNT 45 & CNT 46:
• Diperlukan 3 input • Preset input, Up-pulse Input, CNT 45 atau CNT 46, Preset Value • Nomor Counter yang sama tidak dapat digunakan lebih dari sekali • Jika pulse up dan pulse down aktif bergantian maka akan ERROR • Jika input ON, nilai preset sudah set • Up mode diplih jika UP/DOWN input ON • Down mode diplih jika UP/DOWN input OFF

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 122
• Perhitungan dimulai ketika preset input OFF • Counter output aktif jika nilai perhitungan mencapai nol • Setelah nilai counter mencapai nol, lalu akan berubah menjadi 9999
untuk perhitungan mundur berikutnya • Setelah nilai counter mencapai 9999, lalu akan berubah menjadi nol
untuk perhitungan naik berikutnya • Input preset harus diaktifkan sebelum programming agar nilai
perhitungan kembali ke nilai yang di set • Preset harus dimatikan sebelum perhitungan dimulai • Jika nilai preset diubah pada waktu operasi, perubahan langsung efektif • Perhitungan tidak akan berfungsi jika nilai preset diubah setelah nilai
presetnya telah tercapai Diagram Ladder
List Program
Address Instruction Word Data 0 LOD 1 1 LOD 2 2 LOD 3 3 CNT 45 4 50 5 OUT 00

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 123
Key Operation
Diagram Ladder
List Program
Address Instruction Word Data 0 LOD 1 1 LOD 2 2 LOD 3 3 CNT 46 4 50 5 OUT 00

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 124
Key Operation
Timing Chart CNT45 Dual-Pulse Reversible Counter

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 125
Timing Chart CNT45 Dual-Pulse Reversible Counter
Eksekusi Program Untuk mengurangi kemungkinan terjadinya kesalahan dalam merancang program kendali, perlu diingat hal-hal sebagai berikut:
a. Jumlah kondisi (kontak) yang digunakan seri atau paralel dan juga banyaknya perulangan penggunaan suatu bit tak terbatas sepanjang kapasitas memori PLC tidak dilampaui.
b. Diantara dua garis instruksi tidak boleh ada kondisi yang melintas secara vertikal.
c. Tiap garis instruksi harus memiliki sedikitnya satu kondisi yang menentukan eksekusi instruksi sisi kanan, kecuali untuk instruksi END (01), ILC (03) dan JME (05).
d. Dalam merancang diagram ladder harus memperhatikan kemungkinan instruksi yang diperlukan untuk memasukannya. Misalnya, pada gambar A di bawah ini diperlukan instruksi OR LOAD. Hal ini dapat dihindari dengan menggambar ulang diagram ladder seperti gambar B.

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 126
Gambar 6.11. Penyederhanaan Program Logika
Saat eksekusi program, PLC men-scan program dari atas ke bawah, mengecek semua kondisi, dan mengeksekusi semua instruksi. Instruksi harus ditempatkan dengan tepat, misalnya data yang dikehendaki dipindahkan ke words sebelum words tersebut digunakan sebagai operand instruksi. Ingat bahwa garis instruksi berakhir pada instruksi terminal sisi kanan, setelah itu baru mengeksekusi garis instruksi bercabang ke instruksi terminal yang lain. Eksekusi program semata-mata merupakan salah satu tugas yang dilakukan oleh PLC sebagai bagian dari waktu siklus. Langkah-langkah pembuatan program Untuk membuat program kendali PLC ditempuh melalui langkah-langkah sistematis sebagi berikut:
a. Menguraikan urutan kendali. Pembuatan program diawali dengan penguraian urutan kendali. Ini dapat dibuat dengan menggunakan kalimat-kalimat logika, gambar-gambar, diagram waktu, atau bagan alir (flow chart).
b. Menetapkan bit operand untuk peralatan input/output Bit operand untuk peralatan input/output mengacu pada daerah memori PLC yang

PHK-I 2011 Buku Ajar Mekatronika
Lussiana ETP, Atit Pertiwi, Hustinawati, Ary Bima K, M. Achsan Isa A.A, Yogi Permadi Hal. 127
digunakan. Bit operand dapat dipilih secara bebas sejauh berada pada jangkah daerah memori yang dialokasikan. Tetapi, penggunaan secara bebas sering menjadikan ketidak-konsistenan sehingga menjadikan program kendali keliru. Oleh sebab itulah penggunaan bit operand harus ditetapkan sebelum program dibuat. Inventarisir semua peralatan input dan output yang akan disambung ke PLC, kemudian tetapkan bit operandnya. Jumlah bit oprand yang tersedia bergantung kepada tipe PLC yang dispesifikasikan menurut jumlah input-outputnya. Perbandingan jumlah bit input dan output pada umumnya 3 : 2. Misalnya PLC dengan I/O 10 memiliki bit input sejumlah 6 dan bit output 4.
Di bawah ini diberikan contoh daerah memori PLC OMRON CPM1A-10CDRA.
Daerah Data Words Bit IR (Internal Relay)
Input 0 0.00 – 0.11 Output 10 10.00 – 10.07 Kerja (Internal) 200 – 231 200.00 – 231.15
TR (Temporeraly Relay) TR0 – TR7 Timer /Counter TC0 – TC7










