Embed Size (px)
Citation preview

Building Rome in a Day
Sameer Agarwal1Noah Snavely2 Ian Simon1 Steven M. Seitz1 Richard Szeliski3
1University of Washington 2Cornell University
3Microsoft Research

Outline
• 1. Introduction• 2. System Design• 3. Result• 4. Conclusion

Introduction
• Entering the search term “Rome” on flickr returns more than two million photographs.
• 3D reconstruction• in Google Earth and Microsoft’s Virtual Earth

Exploring Photo Collection in 3D

Outline
• 1. Introduction• 2. System Design– 1.pre-processing & feature extraction– 2.matching– 3.geometric estimation
• 3. Result• 4. Conclusion

Scene reconstruction
• Automatically estimate • position, orientation, and focal length of cameras• 3D positions of feature points

Feature detectionDetect features using SIFT [Lowe, IJCV 2004]

Feature detectionDetect features using SIFT [Lowe, IJCV 2004]

Feature detectionDetect features using SIFT [Lowe, IJCV 2004]

Feature matchingMatch features between each pair of images
approximate nearest neighbor matching

Feature matchingRefine matching using RANSAC [Fischler & Bolles 1987] to estimate fundamental matrices between pairs

Structure from motion
structure for motion: automatic recovery of camera motion and scene structure from two or more images. It is a self calibration technique and called automatic camera tracking or match moving.
Unknowncameraviewpoints

Structure from motion
Camera 1
Camera 2
Camera 3R1,t1
R2,t2
R3,t3
p1
p4
p3
p2
p5
p6
p7
minimize
f (R, T, P)
rotations R, positions t, and 3D point locations P that minimize sum of squared reprojection errors f

Incremental structure from motion

Incremental structure from motion

Incremental structure from motion

Vocabulary trees (Nister & Stewenius, 2006)
• Computational efficiency• k-means tree is used to quantize the feature descriptors

TF-IDF( term frequency–inverse document frequency)
• Consider a document containing 100 words wherein the word cow appears 3 times.
• (TF) = (3 / 100) = 0.03.
• Assume we have 10 million documents and cow appears in one thousand of these.
• (IDF) = log(10 000 000 / 1 000) = 4.

• TF-IDF score is the product of these quantities: 0.03 × 4 = 0.12
• The word is important if the TF-IDF score is large某一特定文件內的高詞語頻率,以及該詞語在整個文件集合中的低文件頻率,可以產生出高權重的 TF-IDF。因此, TF-IDF傾向於過濾掉常見的詞語,保留重要的詞語。

Query expansion • Large-scale image matching• Better approach: use bag-of-words technique
to find likely matches• For each image, find the top M scoring other
images, do detailed SIFT matching with those






Outline
• 1. Introduction• 2. System Design• 3. Result• 4. Conclusion

Matching and reconstruction statics for the three sets

Building Rome in a Day
Rome, Italy. Reconstructed 150,000 in 21 hours on 496 machines
Colosseum
St. Peter’s Basilica
Trevi Fountain

Dubrovnik, Croatia. 4,619 images (out of an initial 57,845).Total reconstruction time: 23 hoursNumber of cores: 352
Dubrovnik, Croatia. 4,619 images (out of an initial 57,845).Total reconstruction time: 23 hoursNumber of cores: 352
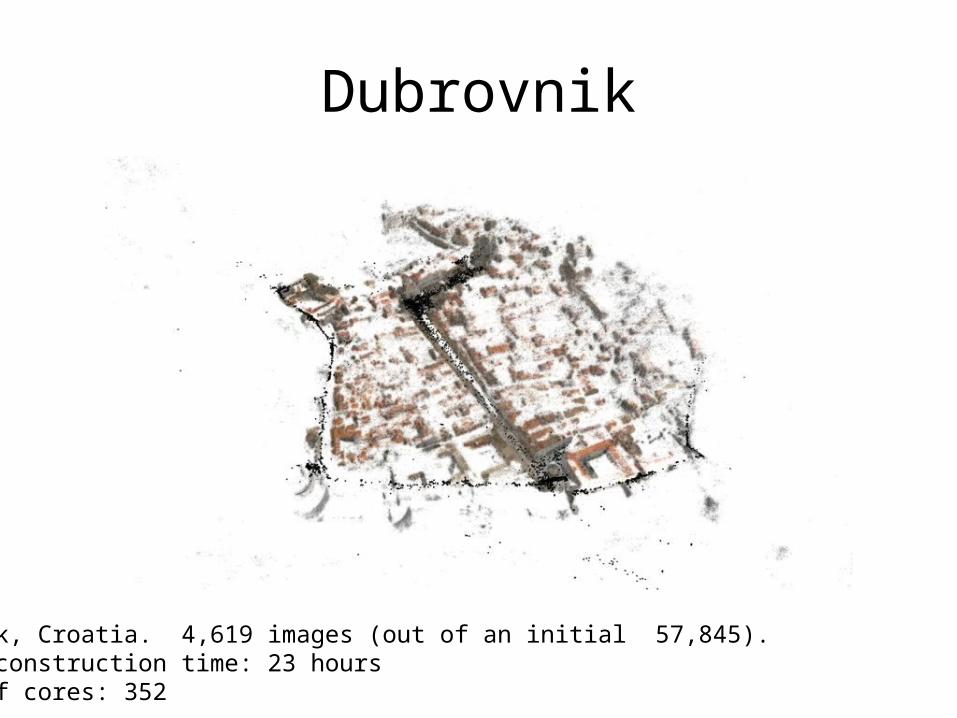
Dubrovnik
Dubrovnik, Croatia. 4,619 images (out of an initial 57,845).Total reconstruction time: 23 hoursNumber of cores: 352

San Marco Square
San Marco Square and environs, Venice. 14,079 photos, out of an initial 250,000. Total reconstruction time: 3 days. Number of cores: 496.

Outline
• 1. Introduction• 2. System Design• 3. Result• 4. Conclusion

Conclusion• Our experimental results demonstrate that it is now
possible to reconstruct cities consisting of 150K images in less than a day on a cluster with 500 compute cores.
Large-scale image matching
3D modelshttp://grail.cs.washington.edu/rome/http://phototour.cs.washington.edu/applet/index.html





















