Embed Size (px)
Citation preview

Ad Hoc Networks xxx (2014) xxx–xxx
Contents lists available at ScienceDirect
Ad Hoc Networks
journal homepage: www.elsevier .com/locate /adhoc
Bridge protection algorithms – A technique for fault-tolerancein sensor networks
http://dx.doi.org/10.1016/j.adhoc.2014.08.0161570-8705/� 2014 Elsevier B.V. All rights reserved.
⇑ Corresponding author. Tel.: +1 407 823 2320; fax: +1 407 823 5835.E-mail addresses: [email protected] (S.A. Khan), [email protected].
edu (L. Bölöni), [email protected] (D. Turgut).
Please cite this article in press as: S.A. Khan et al., Bridge protection algorithms – A technique for fault-tolerance in sensor netwoHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
Saad Ahmad Khan, Ladislau Bölöni ⇑, Damla TurgutDepartment of Electrical Engineering & Computer Sciences, University of Central Florida, 4000 University Blvd, Orlando, FL 32816, USA
a r t i c l e i n f o
Article history:Received 13 February 2014Received in revised form 8 July 2014Accepted 28 August 2014Available online xxxx
Keywords:Sensor networkFault toleranceBridge protection
a b s t r a c t
Sensor networks operating in the field might be subject to catastrophic events whichdestroy a large number of nodes in the geographic area. Often, the aftermath of such anevent is the creation of a network of bridged fragments where connectivity is maintainedby one or several bridge nodes. These networks are vulnerable, because the bridge nodeswill soon exhaust their energy resources leading to the fragmentation of the network. Thispaper describes a bridge protection algorithm (BPA), a combination of techniques which, inresponse to a catastrophic event, change the behavior of a set of topologically importantnodes in the network. These techniques protect the bridge node by letting some nodes takeover some of the responsibilities of the sink. At the same time, they relieve some otheroverwhelmed nodes and prevent the apparition of additional bridge nodes. To achieve this,the algorithm sacrifices the length of some routes in order to distribute routes away fromcritical areas. In a variation on the BPA algorithm, we show that if geographic informationabout the nodes is available, replacing shortest path routing with a routing model whichfollows the edges of the relational neighborhood graph will lead to further improvementsin the expected connected lifetime of the network.
� 2014 Elsevier B.V. All rights reserved.
1. Introduction
The nodes of a sensor network must be deployed insuch a way that both the sensing and the communicationrequirements of the overall network are met. Sensor nodescan go off-line for a variety of reasons: running out ofenergy, environmental events (e.g. forest fire, landslides)as well as the activity of opposing forces (e.g. intruders dis-abling or compromising the sensor nodes which theydetected through visual observation or radio-location). Insuch scenarios, naturally, the sensing quality suffers, asthe off-line nodes do not contribute their sensing to the
overall picture. The sensing quality loss is proportionalwith the number of off-line nodes.
The worst case scenario, however, happens when theloss of a single node can lead to the fragmentation of thenetwork into disjoint subsets of nodes. This way, the lossof a single node can lead to a catastrophic loss of function-ality, because even from areas where the sensors are intact,data cannot reach the sink. A well-engineered network willnever fragment due to the energy consumption during thenormal course of operation as the differences in the energyconsumption can be taken into account during design time.
If, however, a natural or man-made catastrophic eventdestroys a large subset of the nodes, the remaining net-work can emerge with a heavily unbalanced topologywhich could not have been predicted at deployment time.Let us consider a situation where the connectivity stillexists, but the network graph is split into several
rks, Ad

2 S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx
fragments, linked by bridge nodes. We define the bridgenode as a node whose removal disconnects the network.1
In contrast to nodes which have been engineered to handlea high load, bridge nodes are general purpose nodes whichended up in the bridge position due to unpredictable exter-nal circumstances. They do not have higher energy resourcesor longer transmission range, and yet they need to transportthe complete traffic of the fragment on the opposite sidefrom the sink.
In this paper we describe a series of techniques calledbridge protection algorithms (BPAs). An early version ofthis technique has been presented in [1]. BPAs form acoherent response of the network to a catastrophic eventwhich created a network topology of bridged fragments.The BPA changes the behavior of the bridge nodes and theirneighbors in such a way as to lower the energy consump-tion of the bridge and to prevent future failures in the areawhich could create new bridge nodes.
The reminder of the paper is organized as follows.Section 2 describes the scenario we are considering, theperformance metrics and the ways in which we can modelcatastrophic events. Section 3 describes the basic princi-ples behind bridge protection algorithms, including theclassification of specific nodes in the local area of a bridgenode. Section 4 proposes a technique where geographicalinformation about the nodes can be used to improve theefficiency of the BPA algorithm, by replacing shortest pathrouting with a routing in the network defined by the rela-tional neighborhood graph. Section 5 describes the resultsof a simulation study comparing the performance of theBPA variants with the baseline response of a sensor net-work to a catastrophic event. Related work is discussedin Section 6. We conclude in Section 7.
2. Scenario: catastrophic events in an intruder trackingsensor network
2.1. The sensing task and the physical network
The scenario we are considering is that of an intruderdetection system protecting an area of interest such asthe surroundings of a high value military installation. Insuch a scenario the ‘‘smartdust’’ model where disposablenodes are deployed randomly (e.g. thrown out from air-planes) is not appropriate. Instead, the area is protectedby a permanently deployed wireless sensor network, wheresensor nodes costing hundreds or thousands of dollarseach are deployed in carefully chosen locations. The nodesneed to be in position for many years, requiring regularbattery changes, with nodes expected to have largerenergy consumption (for instance by being closer to thesink) being given batteries of larger capacity. In such a per-manent sensor network, under normal conditions, we donot have the extreme energy limitations of the ‘‘smartdust’’type of nodes. This, however, changes in the case of a
1 Our usage of the term ‘‘bridge’’ differs slightly from the standard usagein graph theory. In graph theory a ‘‘bridge’’ is defined as an edge whoseremoval fragments the graph, while a node whose removal disconnects thegraph is called a ‘‘cut-node’’.
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
catastrophic event when the bridge node needs to takeon traffic many times larger than what it was designed for.
The ideal arrangement of nodes would be a rectangularor hexagonal regular grid. The density of the grid dependson the sensing and transmission range of the nodes. Thesensing range determines how well the interest area willbe covered by the sensors. We would prefer that every loca-tion to be covered, even by multiple nodes: but this is a softpreference: an intruder detection system can operate withpartial coverage. The transmission range dependency, how-ever, is hard: if a node cannot communicate with its neigh-bors, the system will not be operational. One reasonablecompromise is to determine the grid size such that the nodeis within transmission range of all neighboring nodes,including along the diagonal, but it is not in the transmis-sion range of nodes two hops away. In an ideal connection,this would imply that each node would have eight neigh-bors. Common sense engineering considerations dictatethat arrangement to be chosen such that the transmissionrange of the nodes to be somewhat higher than the requiredminimum to maintain connectivity.
In practice, however, environmental conditions (e.g. theobstacles and camouflage opportunities in the environ-ment) make the achievement of a perfect grid unfeasible.The customer would prefer to position the node to a loca-tion at some distance from the exact grid position, if thislocation offers advantages. In the resulting ‘‘grid withnoise’’ arrangement of the nodes, some nodes might notreach all the near neighbors, but they might possibly reachone hop away neighbors. The main flow of information onthe network is directed from the sensor nodes to the sink.The nodes detect intruders in their sensor range and sendtheir observations with a hop-by-hop approach to the sinknode, which has the ability to directly transmit the data tothe customer.
Let us now discuss the nature of the routing algorithmused in a permanently deployed sensor network. In anintruder tracking system the overriding design require-ment is that the information about intruders is transmittedas quickly as possible to the sink. This requires that therouting algorithm must converge to the shortest path inthe number of hops. Note that this does not determine aunique routing algorithm – many routing algorithms usedin wireless networks converge to this or closely relatedmetrics. These include distributed techniques using varia-tions of Bellman Ford (DSDV, OLSR and Babel), gradientbased techniques such as directed diffusion, as well as cen-tralized techniques where the neighborhood information isflooded until it reaches the sink, which calculates all theroutes and transmits them back to the nodes. On-demandrouting protocols such as AODV also choose shortest path,although on-demand routing does not offer advantages ina permanent sensor network. Different routing algorithmsdifferentiate themselves in the way they handle changes inthe network topology triggered by node failures or mobilenodes, as well as by the routing overhead, the cost of thesignaling necessary to establish and modify the routes.However, for a sensor network with nodes deployed foryears in the same position there is little to differentiatebetween proactive routing algorithms: the calculatedroutes will be the same and the cost of overhead will be
orithms – A technique for fault-tolerance in sensor networks, Ad

S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx 3
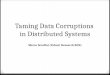
amortized by the long timespan over which the routingtables remain unchanged. In the reminder of this paper,we will consider as our baseline algorithm a genericshortest path algorithm SP, which can stand-in for anyalgorithm which generates a shortest path route. With thisassumption, the forwarding paths in the sensor networkwill look like in Fig. 1.
The sink node is interested in (a) intruder tracking and(b) monitoring the health of the sensor network.
2.1.1. Intruder trackingThe sink node is interested in tracking intruders: in par-
ticular, for each intruder it wants to know whether it is insidethe interest area or not and, for intruders inside the interestarea, their most recent location. The sink is also interested inindependent confirmations of the location of a certainintruder. We will make the assumption that the nodes willtransmit their own observations at fixed time intervals, butimmediately forward other node’s transmissions.
Although simple, this policy has several important prac-tical consequences. If an intruder leaves the interest area,the sensor node will send exactly one transmission report-ing it. It will continue to track the intruder, as long as it is inthe sensor range, but it will not report its location, unless itre-enters the interest area. If the sensor makes severalsuccessive observations before the next scheduled trans-mission, it will transmit only the most recent observation(as the sink is not interested in historical information).
Note that in any well-engineered deployment, thisdefault algorithm will be augmented with a number ofadditional strategies to lower the energy consumption ofthe network. These might include temporal and/or spatialaggregation of reports, selective transmission based onvalue of information or estimates of the sink’s knowledge.The algorithms we propose in this paper are orthogonal toand can be combined freely with aggregation and selectivetransmission. Nevertheless, with many simultaneous tech-niques applied diminishing returns will inevitably set in.Other techniques, such as clustering, require moreextensive changes to be combined with BPA.
2.1.2. Sensor network health monitoringIn order to correctly interpret the received data, the sink
node also needs to monitor the health and integrity of the
Fig. 1. Forwarding paths in the SP routing before
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
sensor network, i.e. the sink needs to know which nodesare functional. If a node is not sending data, it can meaneither that the node is not seeing any intruders or thatthe node is down.
To maintain the state of the network we will require thenodes to send heartbeat messages at specific intervalswhen they do not have anything else to send. Any reportedobservation automatically replaces the heartbeat signal.
2.2. Modeling catastrophic events
In the introduction of this paper we discussed the ideaof a catastrophic event damaging a network and creatingbridge nodes. In the following, we will discuss moreprecisely what type of catastrophic events we consider.
We define a catastrophic event (CE) as a sudden loss of asignificant number of sensor nodes. We will concentrate ongeographically limited catastrophic events, in which all thenodes in a given, well specified geographic area are lost.Such events can be the result of forest fires, floods,chemical contamination or the action of opponent forces.
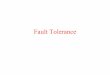
Depending on the relative position of the geographicarea of the CE and the interest area, we consider severalcases based on the ability of a network to collect usefuldata. For each case, we will also consider the ways in whichthe network and its customer can respond to a CE. In gen-eral, a non-physical intervention (such as recomputing therouting tables) is a comparatively cheap way to handle aCE. On the other hand, physical intervention, such as thedeployment of new nodes, is expensive and intrusive.The five cases listed below are illustrated in Fig. 2.
Case 1: Total loss. In this case, all the nodes in the net-work as well as the sink are lost. There is no remainingability to collect data, and the only way to recover datacollection is to deploy a new sensor network and sink.Case 2: Sink loss. In this case, not all the nodes are lost,but the sink is part of the geographic area of the CE.Thus, although some of the nodes are functional andcommunicating, no data is reaching the customer. Theimmediate solution for this situation is to install anew sink node in the functioning area of the network.This might require multiple sinks for disconnected frag-ments. Unless regular sensor nodes can be converted to
the catastrophic event (YAES screenshot).
orithms – A technique for fault-tolerance in sensor networks, Ad

Case 1: Total loss Case 2: Sink loss Case 3: Area loss
Case 4: Fragmented network Case 5: Bridged fragments
Fig. 2. Possible impacts on the network by a catastrophic event.
4 S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx
act as sink nodes, this requires physical intervention inthe network.Case 3: Area loss. The network had lost significant areas,but the sink is functional and the remaining part of thenetwork is strongly connected. The network can recoverits remaining functionality through an update of therouting tables.Case 4: Fragmented network. The CE divided the networkinto two or more fragments, only one being connectedto the sink. The network can recover data collectionfrom the fragment connected to the sink, but to collectdata from the disconnected fragments, it needs physicalintervention. This can take either the form of deployingnew sensor nodes to bridge the fragments or by install-ing a new sink in the disconnected fragment.Case 5: Bridged fragments. In this case, the network isclose to be fragmented, however, the fragments are stillconnected by a narrow bridge. This situation also ariseswhen a fragmented network is repaired by adding aminimal number of bridge nodes. A network of bridgedfragments is still functional, provided that the routingtables had been appropriately recalculated. However,a bridged network is vulnerable, because the transmis-sion of a complete fragment depends on the bridgenode (or a small number of bridge nodes).
The techniques we described in the remainder of thispaper are mitigating the vulnerability of a network ofbridged fragments – a scenario which can appear eitheras the direct result of a CE or as a result of the repairsfollowing a CE which created a fragmented network.
3. Basic principles of bridge protection
3.1. The topology of a network of bridged fragments
Our techniques described in the remainder of this paperwill be based on specialized routing and processing tech-niques in sensor nodes function of their topological position
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
in the network. In this section we will identify the type ofnodes which will receive differentiated responsibilities.
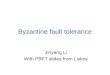
We assumed that prior to the CE the network usesshortest path routing from each node to the sink (Fig. 1).The first step after the CE is the recomputing of the routingtables. An example of this, for the case of a CE creating anetwork of bridged fragments is shown in Fig. 3. For theremainder of this discussion, we shall assume that thereare exactly two bridged fragments (the generalization tomultiple fragments is immediate). We will call the frag-ment which contains the sink the near side while the frag-ment which does not contain the sink the far side fragment.We call a node a bridge node if removing it from the net-work will disconnect the far side fragment from the sink.There may be more than one bridge node. We call gatenodes the non-bridge neighbors of a bridge node on thefar side. Intuitively, the bridge nodes are heavily loaded,because they need to handle the complete informationflow from the far side. Similarly, we call fan-out nodes thenon-bridge neighbors of a bridge node on the near side.There are always at least two gate nodes and two fan-outnodes because if there would be only one, that node wouldbe a bridge node. See Fig. 4 for an example of the locationof the bridge node, gate nodes and fan-out nodes.
3.2. The objectives of the bridge protection algorithm
We designed the bridge protection algorithm with thefollowing objectives in mind:
� Bridge node protection: the BPA should be able to protectthe bridge nodes from prematurely exhausting theirenergy resources.� Prevent the creation of new bridge nodes: we have seen
that there are at least two of the gate and fan-out nodes,thus the failure of a gate or fan-out node will not dis-connect the network. However, such a node might betransformed into a bridge node if all the other gate orfan-out nodes fail.
orithms – A technique for fault-tolerance in sensor networks, Ad

Fig. 3. Forwarding paths reconfigured by the baseline algorithm after the catastrophic event (YAES screenshot).
Fig. 4. Forwarding paths using the bridge protection algorithm after the catastrophic event. The special nodes are marked as follows: bridge solid blacksquare, gate: black border surrounding gray square, fan-out: black border surrounding white square (YAES screenshot).
S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx 5
� Minimal intrusion and sustaining the main functionality ofthe network: the BPA algorithm should be able to sus-tain the normal operation of the network with minimalintrusion. The algorithm should not intervene with thefunctionality of the rest of the network.
In the following we discuss the behavior of a routingalgorithm we label BPA-SP (bridge protection running ontop of shortest path routing).
3.3. BPA functionality at the gate nodes
The BPA algorithm changes the functionality of the gatenodes (see Algorithm 2), in order to reduce the amount ofdata reaching the bridge nodes. Intuitively, this must bedone one step before the bridge node, because once thedata reached the bridge, any processing will inevitablyconsume from the bridge node’s energy. The overall tech-nique we will deploy involves shifting some of the reason-ing about the messages which happen at the sink node tothe gate nodes. Thus the gate nodes will treat differentlythe following message types:
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
� Heartbeat messages: normally, heartbeat messages fromall the nodes reach the sink, which will infer that a quietnode which sends neither observations nor heartbeatmessages over a period of time is likely a failed node.While heartbeat messages are transmitted at relativelylong intervals, they can present a significant load onthe bridge which must forward all the heartbeat mes-sages of the far side nodes. To avoid this, the gate nodeswill perform the reasoning about the live status of thefar side nodes and only send node failure messages (ifnecessary) through the bridge node. On the other hand,the gate nodes will continue to send their own heart-beat messages through the bridge as before.� Occlusion reasoning (see Algorithm 2 lines 3–13): in our
scenario, the sink is not interested in historical observa-tions about the intruders. Due to the different paths ofthe messages in the network, the sink often receivesduplicate or obsolete messages about a given intruder.These messages are discarded, but by that time, theyhad used up resources in the bridge node. The occlusionreasoning (similar to that deployed in [2]) brings thisprocess to the gate nodes. The gate node will delay
orithms – A technique for fault-tolerance in sensor networks, Ad

6 S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx
the forwarding of messages about every intruder for atime Dt after the last report about the same intruder.During this time, the node collects reports about theintruder received from various sensing nodes and sortsthem by observation time (a timestamp added by theobserving node). After the delay, the gate node will onlyforward the most recent observation about the givenintruder.
Although occlusion reasoning decreases the number ofmessages passing through the node, it introduces a delayin the transmission of the messages, and thus it shouldnot be deployed at every regular node if the goal is to havea fast reporting of the intruders. Its application, however, isappropriate at the gate nodes due to two reasons. First, thegate nodes sit just before the bottleneck of the bridge, witha large majority of the far side messages passing throughthem. It is thus more likely that a gate node will be ableto find opportunities for occlusion reasoning by eliminat-ing messages coming from different nodes. Second, at thegate node the cost-benefit analysis is different, as the ben-efit of protecting the bridge and thus the ability of collect-ing data from the far side outweigh the cost of the delay inreporting.
3.4. BPA functionality at the bridge node
The bridge node is a bottleneck between the far andnear side of the network: all the observations transmittedfrom the far side will pass through the bridge. All thesemessages have a common destination, the sink node, thusif the bridge node uses a deterministic routing model, suchas shortest path, the next hop, which is necessarily be oneof the fan-out nodes will also receive this complete load. Inaddition, this node must also forward messages it mightreceive from other near-side nodes and its own observa-tions. Thus, this fan-out node is under even higher dangerof exhausting its resources than the bridge node.
To avoid loading a single fan-out node with the com-plete traffic of the far side, the bridge node will split thetraffic between the fan-out nodes (see Algorithm 3), per-forming a round robin technique when deciding whichfan-out node should receive any given observation.
Fig. 4 illustrates the gate, bridge and fan-out nodes aftera catastrophic event and the fact that, in contrast to othernodes which forward to unique next hops, the bridge nodesplits its traffic over its three fan-out nodes.
3.5. BPA functionality at the fan-out nodes
With the technique described above, the fan-out nodesreceive only a fraction of the traffic of the far side. How-ever, in large networks, where the fan-out nodes are farfrom the sink, there is still a danger that the far side trafficwill re-coalesce at an intermediary node which was notengineered to handle large traffic. This can happen, forinstance, if all the fan-out nodes forward to the same com-mon successor. In these cases, we can replicate the load
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
splitting behavior of the bridge at successive layers offan-out nodes (see Algorithm 4), until we reach a desirablespread of the far side traffic. Note that a later coalescing ofthe far side traffic is not a problem, as in an engineered net-work the nodes close to the sink have the resources to han-dle large amounts of traffic.
Algorithm 1. Default behavior of a sensor node
1: When received intruder report m do2: forwardMessage(m)3: reset heartbeat timer4: End When5: When received heartbeat message m do6: forwardMessage(m)7: reset heartbeat timer8: End When9: When intruder i sighted do
10: m0 = new message11: m0 = intruder identifier, location, time of sighting12: forwardMessage(m0)13: reset heartbeat timer14: End When15: When heartbeat timer expired do16: m0 = new heartbeat message17: forwardMessage(m0)18: End When
Algorithm 2. Behavior of a gate node in BPA
1: When received intruder report m about intruder ifrom node x originating in y do
2: reset heartbeat timer for x and y3: p = most recent report about intruder i4: if p == null then5: set a delayed transmission timer for i6: end if7: if m.sightingTime > p.sightingTime then8: set m as the most recent report about intruder i9: discard p
10: else11: discard m12: end if13: End When14: When timer for intruder i expired do15: m = most recent report about intruder i16: forwardMessage(m)17: End When18: When received heartbeat message m from node x
originating in y do19: reset heartbeat timer for x and y20: End When21: When heartbeat timer expired for x22: m = heartbeat failed for x23: forwardMessage(m)24: End When25: // other events handled as default
orithms – A technique for fault-tolerance in sensor networks, Ad

4
6
8
10
12x 104 Number of transmitted messages
Mes
sage
Cou
nt
Sensor Transmission Range 110mSensor Transmission Range 120mSensor Transmission Range 130m
S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx 7
Algorithm 3. Behavior of a bridge node in BPA
1: When received intruder report m about intruder ido
2: choose next hop f from the fan-out nodes usinground-robin
3: forward m to f4: reset heartbeat timer5: End When6: // other events handled as default
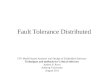
0 5 10 15 20 25 30 35 40 452
Number of mobile targets
Fig. 5. The number of messages function of the number of intruders fortransmission range values of 110, 120 and 130 m respectively for shortestpath routing.
Algorithm 4. Behavior of a fan-out node in BPA
1: When received intruder report m about intruder ido
2: choose next hop f using the load splitting routes(e.g. none or BPA-RNG)
3: forward m to f4: reset heartbeat timer5: End When6: // other events handled as default
0 5 10 15 20 25 30 35 40 450
5
10
15
20
25
30
35
40Bridge node energy consumption
Number of mobile targets
Tran
smis
sion
Ene
rgy
(J)
Sensor Transmission Range 110mSensor Transmission Range 120mSensor Transmission Range 130m
Fig. 6. The energy consumption of the bridge node function of thenumber of intruders for transmission range values of 110, 120 and 130 mrespectively for shortest path routing.
4. Improving BPA with routing in the relationalneighborhood graph
4.1. The impact of the transmission range
In this section we aim to improve the BPA techniques byreconsidering the underlying routing algorithm. We startby showing that a routing algorithm which is optimal fora well-deployed sensor network might not necessarily bethe best choice for protecting the bridge of a network ofbridged fragments.
Let us now consider the impact of the transmissionrange of the nodes on the shortest path routing. We willrestrict our consideration to sensor nodes which haveadjustable power levels (for instance, TelosB node allowsthe setting of 32 levels from �24 dBm to 0 dBm) andassume that the power level is adjusted function of thetransmission distance. For a given network deployment,we will consider the cases where the sensor nodes havetransmission ranges of 110, 120 and 130 m respectively.Our intuition tells us that the larger the transmissionrange, the better the network will perform. Indeed inFig. 5 which shows the number of messages generated asa function of the number of intruders operating in the area,the number of messages is consistently smaller for longervalues of the transmission range.
Unfortunately, if we measure the energy consumptionof the bridge node, we reach a different conclusion. Fig. 6shows that the energy consumption of the bridge nodeincreases consistently with the increase of the transmissionrange. This result, which is contrary to our first intuition isdue to the interaction of several facts. First, the increasingtransmission distance allows nodes to access moreneighbors and they would select the one that would be
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
the farthest from themselves on the way towards the sinknode. The longer distance over which the transmission ismade requires more transmission energy, furthermore,due to the nature of signal attenuation, the energyincreases super-linearly with the distance [3]. This energyincrease might be cancelled out for the overall network bythe smaller number of messages which need to be trans-mitted. However, the decrease in the number of messagesdoes not apply to the bridge node, which must transmit allthe messages from the far side of the network.
In conclusion, as most sensor networks actually usenodes with transmission ranges longer than the minimumnecessary to ensure connectivity, they will behave sub-optimally with respect to the protection of the bridge.
4.2. A computational geometry-based solution: routing in therelative neighborhood graph
In the following we will describe an approach toreduce the graph over which the routing takes place byusing techniques of computational geometry. We startfrom the concept of the Delaunay triangulation [4] of aset of points X, which is a subdivision of the plane intotriangles in such a way that no point will be in the
orithms – A technique for fault-tolerance in sensor networks, Ad

X2
X3
X4
X5
X1
(a) The sensor network nodesbeled from X1 · · ·X5
X2
X3
X4
X5
X1
(b) A valid delaunay triangulabetween the nodes
X2
X3
X4
X5
X1
(c) A non-valid triangulationtween the nodes
X2
X3
X4
X5
X1
(d) Complete formation forlaunay triangulation betweennodes
lation
be thede
Fig. 7. Examples of configurations which qualify and which does not qualify as Delauney triangles.
8 S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx
circumcircle of any of the triangles. Fig. 7 shows severalexamples which illustrate what qualifies and what doesnot qualify as a Delaunay triangle. Intuitively, Delaunaytriangulation tries to avoid ‘‘skinny’’ triangles, in generalpreferring triangles with comparatively short edges fortheir given size.
A Delauney triangulation of the nodes in a sensornetwork will still contain many routing alternatives. Wechoose to further reduce the graph by considering therelative neighborhood graph (RNG) [5], which is always asubset of the Delaunay triangulation. By definition, twonodes xi and xj are relative neighbors if they are at leastas close neighbors to each other as they are to any otherneighboring node. Hence, we obtain the relative neighborsxi and xj 8i; j ¼ 1;2; . . . n; i – j() xi and xj. This meansthat for two-dimensional space where R ¼ 2, the RNGG ¼ ðV ; EÞ having relative neighbors xi; xj is given as:
ðxi; xjÞ 2 E() 8xz 2 V n fxi; xjg ) dðxi; xjÞ> dðxi; xzÞ ^ dðxi; xjÞ > dðxj; xzÞ ð1Þ
Using Eq. (1) the nodes xi and xj will only be relativeneighbors if the lune of node xi and xj does not contain
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
any other node xz. The geometrical lune shape for theneighbors in the RNG graph can be seen in Fig. 8.
Algorithm 5 shows the pseudo-code for the creation ofthe relative neighbor graph for a specific node Nu of thesensor network. The algorithm for Relative NeighborhoodGraph (RNG) consists of two steps. First, we create theDelaunay triangulation of the network. For this, initiallywe need to find all the neighbors at 1-hop distance fromthe node Nu and initialize the 1-hop neighbor list (Q) forthe node Nu (Line 2–6). The next step is to calculate thelune shapes between the relative neighbors according toEq. (1). Afterwards we need to delete those edges forv 2 V which are within the lune of relative neighbors.Hence, the sensor node Nu calculates its distance to neigh-bor Ns and checks whether another neighbor node Nx
exists within the lune of Nu and Ns (Line 9). If Nx doesexist within the lune, then Nu discards Ns as Ns does notsatisfies the RNG graph property (see Eq. (1) and Line10). This process of neighbor selection continues for allof 1-hop neighbors of Nu and in the end we get a list ofneighbors that satisfy the relative neighbor graphy prop-erty, i.e., no third node can exist within the lune of twoconnected nodes.
orithms – A technique for fault-tolerance in sensor networks, Ad

X1
X2X3
(a) X1 and X2 are not relativeneighbors as X3 is inside theirlune.
X1
X2
(b) X1 and X2 are valid relativeneighbors as no other node existsinside their lune.
Fig. 8. The lune shape geometry for relative neighborhood graph nodes.
S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx 9
Algorithm 5. Relative neighbor selection for disjoint pathsfor node Nu
1: Q ;2: for all Ns 2 sensorNetwork do3: if connected [Nu, Ns] then4: Q = Q [ Ns
5: end if6: end for7: for all Ns 2 Q do8: for all Nx 2 Q & Nx – Ns do9: if dist[Nu, Ns] > max(dist[Nu, Nx], dist[Ns, Nx])
then10: Q ¼ Q � Ns
11: end if12: end for13: end for14: return Q
The RNG is a subset of the original connectivity graph ofthe sensor network which, in general, favors the shorteredges while still maintaining the connectivity of the graph.We implement a routing algorithm called BPA-RNG whichdiffers from BPA-SP by the fact that the underlying routingwill be performed exclusively in the RNG graph. In general,we expect that BPA-RNG will have longer paths than BPA-SP, but that it will have a lower energy consumption at thebridge and fan-out nodes, and thus extend the life of thenetwork.
2 Note that this is not the only possibility of the creation of a scenariowith bridged fragments. It is possible that the two events occur at differentpoints in time or that a bridge is created by a single circular event occurringnear the boundary of the sensor deployment.
5. Simulation study
5.1. Simulation scenario
In the following we describe a series of experimentswhich compare the performance of BPA-SP and BPA-RNG
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
with a baseline shortest path routing. The algorithms andthe experimental scenario have been implemented in theYAES simulator [6]. Table 1 summarizes the simulationparameters. The sensor network consists of 80 nodes dis-tributed in an interest area of 1000 � 500 m. The nodesare deployed using a ‘‘grid with noise’’ arrangement (seediscussion in Section 2.1), with a Gaussian noise with thestandard deviation of 0.1 times the length of the grid edgebeing added to the coordinates. We consider the sensornetwork deployment to track the presence of 5–30intruders. We assume that the intruders perform a randomwaypoint movement with a speed of 5–15 m/s. As we dis-cussed in Section 2, the sensor nodes report the movementof the intruders to the sink and, if no reports are sent for atime of 10 s, they send a heartbeat message. We use theenergy dissipation model from Rappaport [3].
5.2. Catastrophic events, recovery and bridge protection
As we are interested in the behavior of the network inresponse to a catastrophic event which leaves it as a net-work of bridged fragments, we have considered a scenariowhere the network starts up with shortest path routing,but very early in the scenario (at tk ¼ 5 s) the simultaneousoccurrence of two catastrophic events (as seen in Fig. 3)transform it into a network of bridged fragments.2 As ananswer to this, the network responds by transitioning toone of the following routing algorithms:
SP: shortest path routing over the recalculated graph. Inthis baseline scenario the only response of the networkis to recompute the shortest path routes, over which it
orithms – A technique for fault-tolerance in sensor networks, Ad

Table 1The parameters of the simulation experiments.
General settingsNumber of nodes 80Distribution area 1000 m � 500 mInterest area 1000 m � 500 mSensing range 150 mTransmission range 140 mSink node location (1100,600)Heartbeat message
interval10 s
Simulation time 100 s
Transmission power modelPath loss index n 4a11 45 nJ/bita2 0.001 pJ/bit/m4
Intruder specificationsIntruder speed 5–15 m/sNumber of intruders 5–30
Catastrophic eventsEvent 1 t = 5, circular area, range 400, center
(375,195)Event 2 t = 5, circular area, range 400, center
(375,450)
1.4
1.6x 105 Number of transmitted messages
Sensor Transmission Range 110mSensor Transmission Range 120m
10 S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx
would route messages as before without any specificbridge protection methods.BPA-SP: bridge protection algorithm over shortest path.In this scenario, the routing tables are recalculatedusing a shortest path model and the bridge, gate andfan-out nodes are identified. The nodes use the bridgeprotection techniques described in Section 3.BPA-RNG: bridge protection algorithm over the relativeneighborhood graph. In this scenario, we are using allthe bridge protection algorithms as described inSection 3 but the routing tables are calculated overthe relative neighborhood graph as described in Section 4.
The identification of bridge, gate and fan-out nodes ofthe network is done at the sink, using graph theoretic tech-niques. If the routing algorithm is a centralized one, thesink already has the necessary information. If the routingalgorithm is a decentralized one, the nodes will transmittheir neighborhood information to the sink in their firstheartbeat message after the catastrophic event. The sinkwill notify the nodes of their status as bridge, gate orfan-out node through the return path a trivially low over-head of only one message per special node.
0 5 10 15 20 25 30 35 40 450.4
0.6
0.8
1
1.2
Number of mobile targets
Mes
sage
Cou
nt
Sensor Transmission Range 130m
Fig. 9. The total number of transmitted messages function of the numberof intruders for transmission range values of 110, 120 and 130 mrespectively for a routing model using BPA-RNG algorithm.
5.3. Behavior of BPA-RNG for different transmission ranges
Our main motivation for developing alternative tech-niques to BPA-SP was the observation that the shortestpath routing behaves in a suboptimal way when the trans-mission range exceeds the required minimum to keep thenetwork connected. In particular, we found that as thetransmission range was increasing, the number of mes-sages were decreasing, but the energy expenditure of thebridge node was increasing.
In this first experiment, we verify that the BPA-RNGalgorithm provides a more consistent behavior when thetransmission range is increased. Fig. 9 shows the number
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
of messages transmitted network-wide function of thenumber of intruders. The three graphs correspond to theBPA-RNG routing technique, for transmission ranges of110, 120 and 130 m respectively. We find that the numberof transmitted messages vary very little as a function of thetransmission range (in contrast to the BP algorithm inFig. 5) where the number of messages varies significantlywith the transmission range.
5.4. Total transmitted messages
In this experiment we compared the total number oftransmitted messages for the three algorithms as a func-tion of the number of intruders. The results of the experi-ment are shown in Fig. 10.
We find that the BPA-RNG algorithm sends the largestnumber of messages, followed by SP and BPA-SP. AlbeitSP and BPA-SP are using the same routing paths, theBPA-SP sends fewer messages due to the processing per-formed by the gate nodes. While this processing is alsoperformed for BPA-RNG, the overall number of messagesis still higher as the different routing tables prefer pathswhich might be longer in terms of the number of hopsbut consist of shorter individual hops.
5.5. Bridge node energy consumption
In this experiment, we compared the energy consump-tion of the bridge node function of the number of intrudersfor the three considered algorithms (see Fig. 11). In a net-work of bridged fragments with a bridge node with a lim-ited energy resource, this value directly determine themoment when the data collection from nodes on the farside is lost.
Overall, as expected, the energy consumption of thebridge node is increasing with the number of intrudersfor all protocols. In general, the BPA algorithm significantlylowers the energy consumption of the bridge node for boththe BPA-SP and BPA-RNG algorithms. In addition, the BPA-RNG algorithm further reduces the energy consumption byabout 25% in the specific experiments.
orithms – A technique for fault-tolerance in sensor networks, Ad

0 5 10 15 20 25 30 35 40 450
10
20
30
40
50Bridge node energy consumption
Number of mobile targets
Tran
smis
sion
Ene
rgy
(J)
SPBPA−SPBPA−RNG
Fig. 11. The energy consumption of the bridge node function of thenumber of intruders for the SP, BPA-SP and BPA-RNG algorithms.
100
Maximum energy consumption in the fanout nodes
SPBPA−SP
S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx 11
5.6. Maximum energy consumption of a fan-out node
As we noted before, it is not only the bridge node whichis in danger to exhaust its energy resources too soon due tooverload, but also the fan-out nodes, especially in the caseof SP where the traffic of the far side is concentrated to onefan-out node. It is thus of interest to investigate the energyconsumption of the fan-out node with the highest energyconsumption. The results of the experiment are shown inFig. 12.
In general, we find that the fan-out node energy con-sumption increases with the number of intruders for alltechniques. There are, however, accidental variations –for instance, if most intruders happen to be in the near-sideof the bridged fragments, then those intruders will notcontribute to the energy consumption of the fan-out nodes.
We find that the bridge protection techniques signifi-cantly reduce the fan-out energy consumption – bothBPA-SP and BPA-RNG have significantly lower values.Between these two values, BPA-RNG has a significantadvantage, especially in scenarios of more than 15 intrud-ers, where BPA-RNG consistently consumes only about halfof the energy of BPA-SP at the fan-out nodes.
0 5 10 15 20 25 30 35 40 450
20
40
60
80
Number of mobile targets
Tran
smis
sion
Ene
rgy
(J) BPA−RNG
Fig. 12. The highest fan-out node energy consumption function of thenumber of intruders for the SP, BPA-SP and BPA-RNG algorithms.
5.7. Network life extension ratio
The objective of the BPA algorithms is to extend the lifeof the network. Considering that energy exhaustion of thebridge node is the most likely cause of the network tobecome disconnected, the best way to illustrate the bene-fits of the BPA-SP and BPA-RNC algorithms is to study howmuch longer a network can maintain connectivity com-pared to the basic algorithm. (Note that this is a relativevalue – the absolute number depends on the remainingenergy in the bridge node at the moment of the cata-strophic event, a value which is not under the control ofthe networking algorithms.)
Fig. 13 shows the relative increase of the network life-time for BPA-SP and BPA-RNG compared to the SP algo-rithm. Overall, we find that ratio of the life extensiondecreases with the number of intruders. However, even
0 5 10 15 20 25 30 35 40 452
3
4
5
6
7
8
9
10
11x 104
Number of messages
Number of mobile targets
Tota
l num
ber o
f sen
t mes
sage
s in
the
netw
ork
SPBPA−SPBPA−RNG
Fig. 10. The total number of transmitted messages function of thenumber of intruders for the SP, BPA-SP and BPA-RNG algorithms.
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
for 40 intruders tracked, BPA-SP extends the lifetime about2 times, while BPA-RNG about 3 times. If the number ofintruders is low, these values are significantly higher: upto about 5 times for BPA-SP and about 7 times forBPA-RNG.
6. Related work
Early sensor network literature considered that thefragmentation of the sensor network (due to the exhaus-tion of the energy resources of a group of nodes) representsthe end of the life-cycle of the network [7]. Althoughsystem wide algorithms have been designed to postponefragmentation, for instance, by energy aware routing, therewas little consideration given to what can be done if thefragmentation already happened (or is about to happen).
In recent years, however, a series of papers have beeninvestigating the problem of federated sensor networks –systems whose topology is either separated in discon-nected graphs or it is connected with weak, narrow and/or intermittent connection. Existing work in the area canbe grouped into two distinct approaches.
orithms – A technique for fault-tolerance in sensor networks, Ad

0 5 10 15 20 25 30 35 40 451
2
3
4
5
6
7Network life extension ratio
Number of mobile targets
Rat
io
BPA−SPBPA−RNG
Fig. 13. The relative increase of the network lifetime for BPA-SP and BPA-RNG compared to the SP algorithm.
12 S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx
The first approach proposes the linking of the federatednetworks using mobile nodes. One of the earliestapproaches is the data mule architecture of Shah et al.[8] where randomly moving mobile nodes (mules) trans-port data among the nodes of a sparsely connected net-work. Recent work developed by Basagni et al. [9,10] uselinear optimization techniques and heuristics to maximizethe lifetime of the sensor network.
Almasaeid and Kamal [11,12] use mobile relay nodes(MRs) to act as data relays between fragments of a sensornetwork which became fragmented. The authors use steadystate probabilities to model the delays between the frag-ments and the delays between fragments-to-sink. Factorssuch as the sojourn time: time for the MRs to stay inbetween fragments to relay data is also taken into accountfor the optimized movement policy of the MRs. Mathemat-ical modeling of the movement policy was proposed usingclosed queueing network. Evaluating its performance usingTOSSIM [13] the authors emphasize the impact of sojourntime and other factors such as count and speed of MRs forthe fragmented network data delivery.
In the work by Abbasi et al. [14,15], the recovery of afragmented network is performed by moving some of theexisting nodes to positions where they can reconnect thefragments and provide connectivity at a specific level(one or two-connectivity). These techniques can be seenas hybrids between the mobile node-based and the relaynode-based approaches. The same problem is investigatedby Akkaya et al. [16] and Imran et al. [17–19].
Zhao et al. [20] describe an approach where a set of spe-cial nodes called message ferries are providing communi-cation services to networks of nodes (which can bethemselves mobile). The paper describes two differentapproaches depending on whether the movement is initi-ated by the nodes (nodes move close to ferries in orderto communicate) or whether the ferries pro-actively moveto meet the nodes.
In contrast to these approaches which consider that themobility of the specific nodes is explicitly designed toaddress the connection of the network fragments, opportu-nistic networking [21] designs routing protocols to take
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
advantage of opportunities created by moving nodes tobring the transmitted data closer to the destination. Inthese systems, it is possible for messages to reach their des-tination even if there is no moment in time when a fullyconnected route exists between the source and destination.
The idea of using cascaded node movement has alsobeen proposed to avoid possible fragmentation by Wanget al. [22]. The idea of cascaded network movement worksin two phases. The first phase is to locate a nearby sensornode (near the failure node) that has low activity and issuitable for replacement. The second phase is to use cas-caded movements between sensor nodes to rearrange thenetwork. Instead of having the direct movement of redun-dant sensor node to the point of fragmentation, the nearbynodes relocate themselves to cover the fragmented area.
Another approach to federated sensor networks investi-gates how the federations can be connected using a num-ber of nodes called relays. Relay nodes might have specialproperties, such as longer range or higher energyresources. The challenge is to choose the location of therelay nodes such that connectivity, and possibly, certainquality of service criteria are achieved with a minimumnumber of nodes.
Cheng et al. [23] show that even the simplest possibleformulation of the relay node problem (asking only forthe minimum number of relay nodes) is equivalent to theNP-hard problem.
Hou et al. [24] consider the response of the networkoperator to the fragmentation of the network, which canbe a combination of deploying new relay nodes and addingadditional energy resources to existing nodes. The result-ing joint problem of energy provisioning and relay nodeplacement can be formulated as a mixed-integer nonlinearprogramming problem. These class of problems being NP-hard, the authors propose a heuristic approach whichtransforms the problem into a linear programming prob-lem, without loosing important points of the search space.
Lee and Younis [25] solve the relay node placementproblem in a network where the requirement is not onlythe maintenance of connectivity but also a series of qualityof service requirements. As the problem is NP-hard, theproposed approach OQAP (Optimized QoS Aware Place-ment of relay-nodes) pursues a greedy heuristics whilemodeling the network as a grid.
The bridge protection algorithm described in this paperconsiders a scenario where the federations are connectedusing a very narrow and vulnerable link. Instead of consid-ering the situation after the fragmentation of the networkinto federations, BPA considers a network close to frag-mentation, and changes the behavior of the nodes in sucha way that they protect the bridge nodes, postponing, aslong as possible, the fragmentation of the network.
The BPA algorithm complements, rather than replaces,existing federated sensor network technologies. In our run-ning scenario, we have defined the bridge nodes as theremaining nodes which maintain connectivity after a cata-strophic event. However, bridge nodes can appear in a dif-ferent way as well: from the relay nodes introduced by therelay node placement algorithms. In fact, if a minimalnumber of relay nodes are chosen, these nodes will, by def-inition, be bridges. The BPA algorithm, applied in tandem
orithms – A technique for fault-tolerance in sensor networks, Ad

S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx 13
to a relay node placement algorithm, can maximize thebenefit of the repair, and postpones the necessity of addi-tional repairs in the future.
7. Conclusions
In this paper we considered the case of an intrudertracking sensor network faced with a catastrophic eventwhich result in a network topology of bridged fragments.Such networks are vulnerable as the exhaustion of theenergy resources of a bridge node can disconnect largefragments of the network. We have introduced two routingprotocols BPA-SP and BPA-RNG which protect the bridgeby imposing a differentiated behavior on nodes withspecial roles in the topology. Through a simulation study,we have shown that the proposed protocols can extendthe connected lifetime of the network 2–7 times over thedefault shortest path routing.
References
[1] L. Bölöni, D. Turgut, Protecting bridges: reorganizing sensornetworks after catastrophic events, in: Proc. of the 7thInternational Wireless Communications and Mobile ComputingConference (IWCMC-2011), 2011, pp. 2028–2033.
[2] D. Turgut, B. Turgut, L. Bölöni, Stealthy dissemination in intrudertracking sensor networks, in: Proc. of IEEE Local Computer Networks(LCN 2009), 2009, pp. 22–29.
[3] T. Rappaport, Wireless Communications: Principles & Practice,Prentice-Hall, 1996.
[4] D.-T. Lee, A.K. Lin, Generalized Delaunay triangulation for planargraphs, Discr. Comput. Geomet. 1 (1) (1986) 201–217.
[5] K.J. Supowit, The relative neighborhood graph, with an application tominimum spanning trees, J. ACM (JACM) 30 (3) (1983) 428–448.
[6] L. Bölöni, D. Turgut, YAES – a modular simulator for mobilenetworks, in: Proc. of the 8-th ACM/IEEE International Symposiumon Modeling, Analysis and Simulation of Wireless and MobileSystems (MSWIM 2005), 2005, pp. 169–173.
[7] J. Yick, B. Mukherjee, D. Ghosal, Wireless sensor network survey,Comput. Networks 52 (12) (2008) 2292–2330.
[8] R. Shah, S. Roy, S. Jain, W. Brunette, Data mules: modeling andanalysis of a three-tier architecture for sparse sensor networks, AdHoc Networks 1 (2–3) (2003) 215–233.
[9] S. Basagni, A. Carosi, C. Petrioli, Heuristics for lifetime maximizationin wireless sensor networks with multiple mobile sinks, in: Proc. ofthe IEEE ICC’09, 2009, pp. 1–6.
[10] S. Basagni, A. Carosi, C. Petrioli, C.A. Phillips, Coordinated andcontrolled mobility of multiple sinks for maximizing the lifetime ofwireless sensor networks, Wireless Networks 17 (3) (2011) 759–778.
[11] H. Almasaeid, A. Kamal, Data delivery in fragmented wireless sensornetworks using mobile agents, in: Proc. of the ACM Int’l Symposiumon Modeling, Analysis and Simulation of Wireless and MobileSystems (MSWIM 2007), 2007, pp. 86–94.
[12] H. Almasaeid, A. Kamal, Modeling mobility-assisted data collectionin wireless sensor networks, in: Proc. of the IEEE GlobalCommunications Conference (GLOBECOM-2008), 2008, pp. 1–5.
[13] P. Levis, N. Lee, M. Welsh, D. Culler, TOSSIM: accurate and scalablesimulation of entire TinyOS applications, in: Proc. of the 1stInternational Conference on Embedded Networked Sensor Systems,2003, pp. 126–137.
[14] A.A. Abbasi, K. Akkaya, M. Younis, A distributed connectivityrestoration algorithm in wireless sensor and actor networks, in:Proc. of 32nd IEEE Conference on Local Computer Networks (LCN2007), 2007, pp. 496–503.
[15] A.A. Abbasi, M. Younis, K. Akkaya, Movement-assisted connectivityrestoration in wireless sensor and actor networks, IEEE Trans.Parallel Distrib. Syst. 20 (9) (2009) 1366–1379.
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
[16] K. Akkaya, F. Senel, A. Thimmapuram, S. Uludag, Distributedrecovery from network partitioning in movable sensor/actornetworks via controlled mobility, IEEE Trans. Comput. 59 (2)(2010) 258–271.
[17] M. Imran, M. Younis, A. Md Said, H. Hasbullah, Volunteer-instigatedconnectivity restoration algorithm for wireless sensor and actornetworks, in: Proc. of IEEE International Conference on WirelessCommunications, Networking and Information Security (WCNIS2010), 2010, pp. 679–683.
[18] M. Imran, M. Younis, A.M. Said, H. Hasbullah, Partitioning detectionand connectivity restoration algorithm for wireless sensor and actornetworks, in: Proc. of the 8th IEEE/IFIP International Conference onEmbedded and Ubiquitous Computing (EUC 2010), 2010, pp. 200–207.
[19] M. Imran, M. Younis, A. Md Said, H. Hasbullah, Localized motion-based connectivity restoration algorithms for wireless sensor andactor networks, J. Network Comput. Appl. 35 (2) (2012) 844–856.
[20] W. Zhao, M. Ammar, E. Zegura, A message ferrying approach for datadelivery in sparse mobile ad hoc networks, in: Proc. of the ACMInternational Symposium on Mobile Ad Hoc Networking andComputing (MobiHoc 2004), 2004, pp. 187–198.
[21] L. Pelusi, A. Passarella, M. Conti, Opportunistic networking: dataforwarding in disconnected mobile ad hoc networks, IEEE Commun.Mag. 44 (11) (2006) 134–141.
[22] G. Wang, G. Cao, T. La Porta, W. Zhang, Sensor relocation in mobilesensor networks, in: Proc. of 24th Annual Joint Conference of theIEEE Computer and Communications Societies (INFOCOM-2005), vol.4, 2005, pp. 2302–2312.
[23] X. Cheng, D. Du, L. Wang, B. Xu, Relay sensor placement in wirelesssensor networks, Wireless Networks 14 (3) (2008) 347–355.
[24] Y. Hou, Y. Shi, H. Sherali, S. Midkiff, On energy provisioning and relaynode placement for wireless sensor networks, IEEE Trans. WirelessCommun. 4 (5) (2005) 2579–2590.
[25] S. Lee, M. Younis, QoS-aware relay node placement in a segmentedwireless sensor network, in: Proc. of the IEEE Int’l Conference onCommunications (ICC 2009), 2009, pp. 1–5.
Saad Ahmad Khan completed his bachelorsin Electrical Engineering (specializing inTelecommunication) from University of Engi-neering & Technology, Lahore. During his MSche specialized in the area of Computer Engi-neering from the same university. After hisbachelors, in fall 2007, he joined Al-Khwariz-imi Institute of Computer Science as aresearch associate and worked in the area ofwireless sensor networks. He also joinedDepartment of Electrical Engineering in hismother institution as a lecturer in 2008. Cur-
rently he is completing his doctoral studies from University Of CentralFlorida where he is associated with NetMoc research lab. His currentresearch is under the supervision of Dr. Ladislau Bölöni and his area of
interests include, but no limited to, multi-agent systems and human-robot interaction, cognitive radio and sensor networks.Ladislau Bölöni is an associate professor atthe Dept of Electrical Engineering and Com-puter Science of University of Central Florida.He received a PhD degree from the ComputerSciences Department of Purdue University inMay 2000, an MSc degree from the ComputerSciences department of Purdue University in1999 and BSc. Computer Engineering withHonors from the Technical University of Cluj-Napoca, Romania in 1993. He received a fel-lowship from the Computer and AutomationResearch Institute of the Hungarian Academy
of Sciences for the 1994–1995 academic year. He is a senior member ofIEEE, member of the ACM, AAAI and the Upsilon Pi Epsilon honorarysociety. His research interests include cognitive science, autonomous
agents, grid computing and wireless networking.orithms – A technique for fault-tolerance in sensor networks, Ad

14 S.A. Khan et al. / Ad Hoc Networks xxx (2014) xxx–xxx
Damla Turgut is an Associate Professor in theDepartment of Electrical Engineering andComputer Science of University of CentralFlorida. She received her BS, MS, and PhDdegrees from the Computer Science andEngineering Department of University ofTexas at Arlington. Her research interestsinclude ad hoc, vehicular ad hoc and sensornetworks, with special focus on clustering,routing, MAC, and dissemination protocols aswell as considerations of stealth and value ofinformation. She is also interested in specific
applications such as urban sensing, human mobility models, intrudertracking and underwater sensor networks. She serves on the editorial
Please cite this article in press as: S.A. Khan et al., Bridge protection algHoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.016
boards of IEEE TPDS, Elsevier Journal of Ad Hoc Networks. She is currentlyserving as the TPC Chair for IEEE CCNC 2014 – Smart spaces and wirelessnetworks symposium and IEEE LCN 2013. She received the 2011 CollegeExcellence in Professional Service Award and she is also a co-recipient ofIEEE ICC 2013 Best Paper Award.
orithms – A technique for fault-tolerance in sensor networks, Ad