Embed Size (px)
Citation preview

Brian Su 蘇千翔 2020. 1. 13
Sr. Project Manager / Keysight Technologies
Keysight AV自駕車 x EV電動車 Seminar

2
Keysight’s
Contribution
to Address the
Automotive Radar
Challenges
Autonomous
Vehicle and
Automotive Radar
Market Overview
Automotive Radar
Standards and
Regulatory
Testing
Keysight Radar
Solution Portfolio
Keysight AV自駕車 x EV電動車 Seminar

3Keysight AV自駕車 x EV電動車 Seminar

4
E N A B L I N G T E C H N O L O G Y A N D T Y P I C A L S E N S O R S C O N T E N T
Autonomous Driving
Level / Type of Sensors
Level 1
(Drive Assistance)
Level 2
(Partial Automation)
Level 3
(Conditional Automation)
Level 4
(High Automation)
Level 5
( Automation)
Human level monitoring
of Environment
Driver maintains overall
control but can cede
limited authority
Driver responsible for
monitoring the roadway
and control at all times
Driver must be available to
take control of the vehicle
at all times with short notice
Vehicle is capable of
performing all driving
functions with conditions.
Driver may have the option
to control the vehicle
Vehicle is capable of
performing all driving
functions unconditionally.
Driver may have the option
to control the vehicle
Application Example Adaptive Cruise Control
or Lane Centering
Adaptive Cruise Control
and Lane Centering at
the same time
Traffic jam chauffeur • Driverless Taxi
• Driving with or without pedals or steering wheel
Ultrasonic 4 8 8 8 8 to 10
Long Radar 1 1 2 2 2 to 4
Short Radar 2 2 to 4 2 to 4 4 to 6 4 to 8
Camera / Short Lidar 1 2 to 4 7 7 to 8 9 to 10
Long Lidar 0 to 1 0 to 1 1 to 2 2 to 4 4
V2X 0 to 1 0 to 1 1 1 1 to 2
GNSS 0 to 1 0 to 1 1 1 1
Total 8 to 11 13 to 20 22 to 25 25 to 30 29 to 39
Rollout Timing 2012 2016 2018 2021 > 2025
Keysight AV自駕車 x EV電動車 Seminar
5
R A D A R T R E N D S A N D O U T L O O K
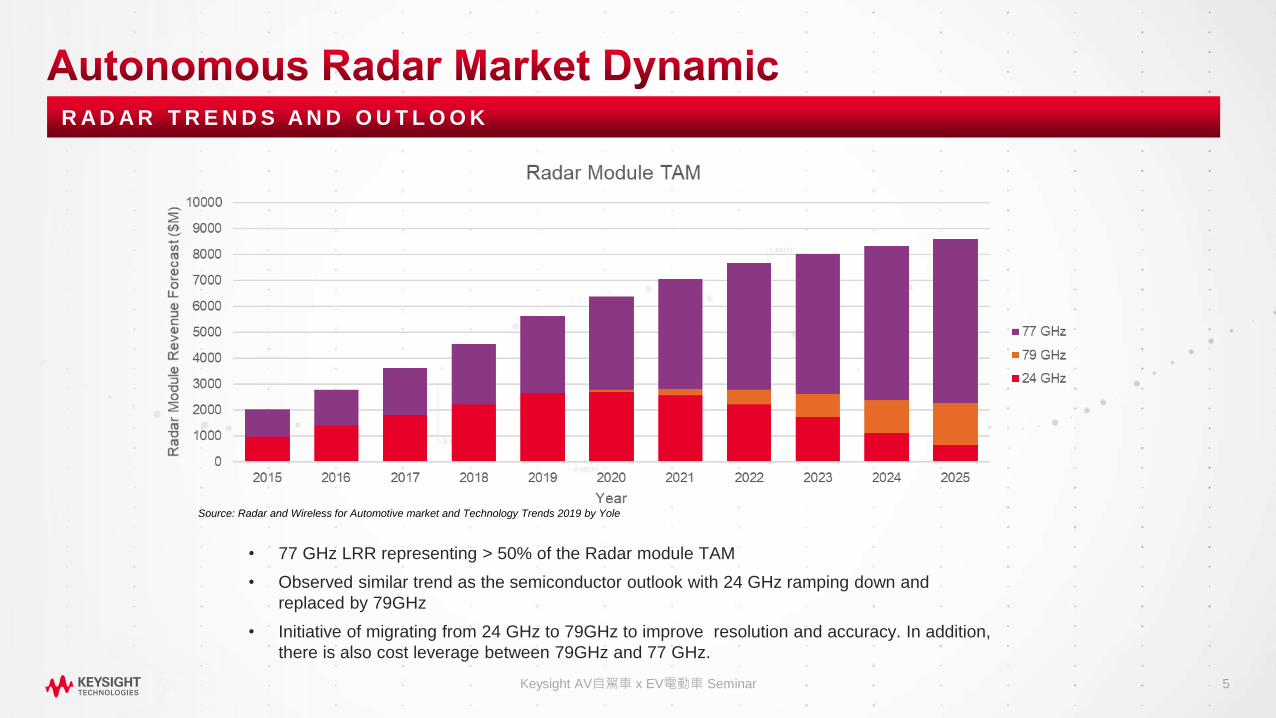
Source: Radar and Wireless for Automotive market and Technology Trends 2019 by Yole
• 77 GHz LRR representing > 50% of the Radar module TAM
• Observed similar trend as the semiconductor outlook with 24 GHz ramping down and
replaced by 79GHz
• Initiative of migrating from 24 GHz to 79GHz to improve resolution and accuracy. In addition,
there is also cost leverage between 79GHz and 77 GHz.
Keysight AV自駕車 x EV電動車 Seminar

6
R A D A R S E N S O R S C H A R A C T E R I S T I C
LRR76 GHz – 77 GHz
1 GHz BW
MRR76 GHz – 77 GHz
77 GHz – 81 GHz
4 GHz BW
• Operating Freq 76 – 81 GHz
• Support up to 4GHz BW
• Simulate up to 300m
• FOV up to 80 degree
Mid-range radar
Range of 30m to 60m
Long-range radar
Range 200m Camera
Visual range of up to 500m
Short-range radar
Range of 0.2m to 30m
80◦ 60◦ 18◦ 35◦
SRR24 GHz
77 GHz – 81 GHz
4 GHz BW
Keysight AV自駕車 x EV電動車 Seminar

7
K E Y S I G H T B R I N G I N G R E A L W O R L D T E S T E N V I R O N M E N T T O L A B
Radar Target Simulator
Emulating Real World Object
Arbitrary Waveform Generator
Emulating Interference Source
Spectrum Analyzer
Enabling Signal Analysis
Victim Radar
D: distance to object
Object size
RCS (dBsm)
Dblock: distance between DUT and interference source
Keysight AV自駕車 x EV電動車 Seminar

8
F U T U R E R A D A R T O WA R D S L E V E L 5 A U T O N O M O U S D R I V I N G
Emulate dynamic real world simulation: Complex multi-target scenario simulation
Differentiate nearby objects from one to another: High resolution testing
Enable imaging radar sensor far field simulation: Cost effective ways to test imaging radar
Contrast large object: 3D elevation testing and characterization
Zero missed, ensuring all objects are accountable:
Interference mitigation
Keysight AV自駕車 x EV電動車 Seminar

9Keysight AV自駕車 x EV電動車 Seminar

10
K E Y S I G H T M U LT I TA R G E T F L E X I B L E R E M O T E H E A D R T S
-90deg.
+90deg.
DUT: Radar
76.5GHz
OR 79GHz
0deg.
Dynamic variable
distance simulator
4 – 300m
Static fixed Xm
Static fixed Ym
Dynamic variable
distance simulator
4 – 300m
Keysight AV自駕車 x EV電動車 Seminar

11
K E Y S I GH T OB J E C T M OV E M E N T GE N E R ATOR S E QU E N C E C ON T R OL
OMGenerator
➢ A standalone tool to assist user to create object movement
sequence before import to RTS SFP
➢ Option to control either distance or speed
• Auto Distance: Define object speed and time duration
and interval
• Auto Speed: Define object distance and time duration
and interval
➢ With preview graph display
Simulate moving Object
➢ Configurable sequence setting for , RCS and Doppler
➢ Sequence table will display all sequence list up to 1024
(0 to 1023 sequences)
➢ Option to use OMGenerator to create sequence list or load
from predefined text or excel spreadsheet
Sequence Control UI OMGenerator
Keysight AV自駕車 x EV電動車 Seminar
12
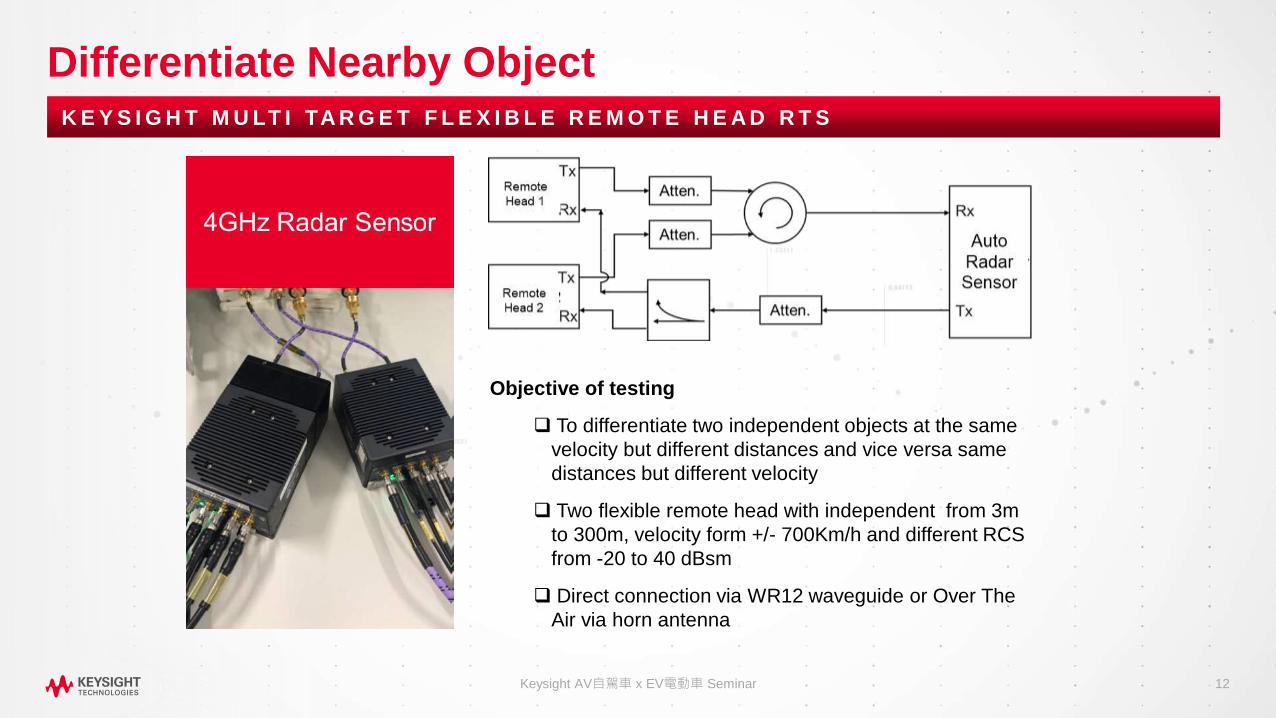
K E Y S I G H T M U LT I TA R G E T F L E X I B L E R E M O T E H E A D R T S
Objective of testing
❑ To differentiate two independent objects at the same
velocity but different distances and vice versa same
distances but different velocity
❑ Two flexible remote head with independent from 3m
to 300m, velocity form +/- 700Km/h and different RCS
from -20 to 40 dBsm
❑ Direct connection via WR12 waveguide or Over The
Air via horn antenna
Differentiate Nearby Object
Keysight AV自駕車 x EV電動車 Seminar

13
K E Y S I GH T M U LT I TAR GE T S I M U LAT I ON S OFTWAR E GU I
Keysight Multi Target GUI
Radar Target Simulator
Up to 4 Targets
LAN
Simulator1 Simulator2
Simulator3
Remote Desktop
or
Webpage service
Multi
Target
GUI
Simulator4
Keysight AV自駕車 x EV電動車 Seminar

14
DescriptionFixed distance
RTS
+ variable
distance+ Doppler + SA
+ Multi AoA
variable & fixed
distance
+ Multi AoA
variable
distance RTS
Key Features • Dual Horn
• 76-81GHz
• 4GHz BW
• 75 & 150m
• RCS
• Laser
alignment
• 4 – 300m
with 0.1m
resolution
• 0,03m
resolution
step (future
option)
• +/- 360
Km/h with
0.1Km/h
resolution
• Enable DUT
EIRP and
OBW
parallel
measureme
nt
• 3 AoA with
1x Dynamic
Scenario
2x Fixed
Distance
• 76-81GHz
with 4GHz
BW, distance
& Doppler
• Multi AoA
with
Dynamic
Scenario
• 76-81GHz
with 4GHz
BW,
distance &
Doppler
Hardware
Configuration
Core System Core system internal HW or SW upgrade Multi-Head Multi RTS
K E Y S I GH T E 8 7 1 8 A H I GH R E S OLU TI ON R TS
Keysight AV自駕車 x EV電動車 Seminar

15
K e ys i g h t ’s R a d a r Ta r g e t S i m u l a t o r
DEMO
E8718A Radar Target Simulator, 76-81GHz
, with Remote Front End
Keysight AV自駕車 x EV電動車 Seminar

16
C O S T E F F E C T I V E S I M U L AT I O N W I T H K E Y S I G H T C AT R A N E C H O I C C H A M B E R
Keysight CATR Chamber
• Operate up to 110 GHz
• Quite Zone 30cm
• Amplitude Tape 1 dB
• Amplitude Ripple < +/- 0.5 dB
• Phase Variation < 10 deg
Imaging Radar Challenges
• Parabolic reflector converts the diverging
beam into a plane-wave (far-field) beam
• DUT to be placed in the Quite Zone
• Rotation allows Azimuth characterization
• Reciprocal operation enables Tx and Rx test
• Integrated and calibrated OTA test solution
Radar
Target
Simulator
Radar DUT
Keysight AV自駕車 x EV電動車 Seminar

17
K E Y S I GH T AU TOM OT I V E I N TE R FE R E N CE TE S T S OLU T I ON
E8718A
Radar Target Simulator
M8195A of
E8740A-080
N9041B/N9040B
of E8740A-060
DSOS804 of
E8740A-060
Radar Rx signalRadar Tx signal
Radar
Interference
signal
Radar
DUTRadar Rx signal
using smart mixer
Keysight AV自駕車 x EV電動車 Seminar
18Keysight AV自駕車 x EV電動車 Seminar

19
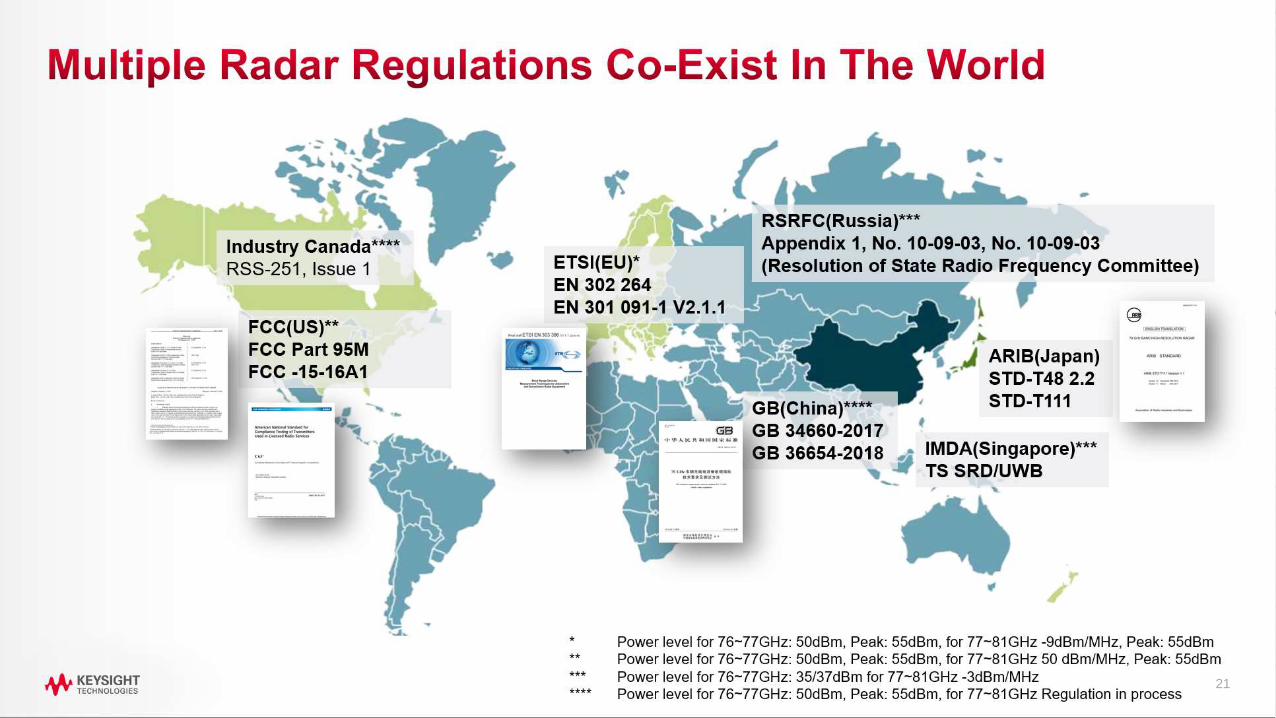
• RF Regulatory Test Standards
• FCC, ETSI, TELEC, GB, and ARIB
• ETSI Regulations in Europe
• RF Regulatory test items
• Measurement Setup and Test Procedure
• ETSI Test set-up requirements
• Test signal creation
• Transmitter conformance test
• Emissions test
• Functional Test
• Signal Quality Measurement
• Receiver / Interference Test
• Test Automation Software and Test Report
A U T O M O T I V E R A D A R S TA N D A R D S A N D R E G U L AT O R Y T E S T I N G
Keysight AV自駕車 x EV電動車 Seminar

20Keysight AV自駕車 x EV電動車 Seminar
2121

2222

2323

24
E T S I E N 3 0 1 0 9 1 F O R 7 6 ~ 7 7 G H Z
Keysight AV自駕車 x EV電動車 Seminar
25Keysight AV自駕車 x EV電動車 Seminar
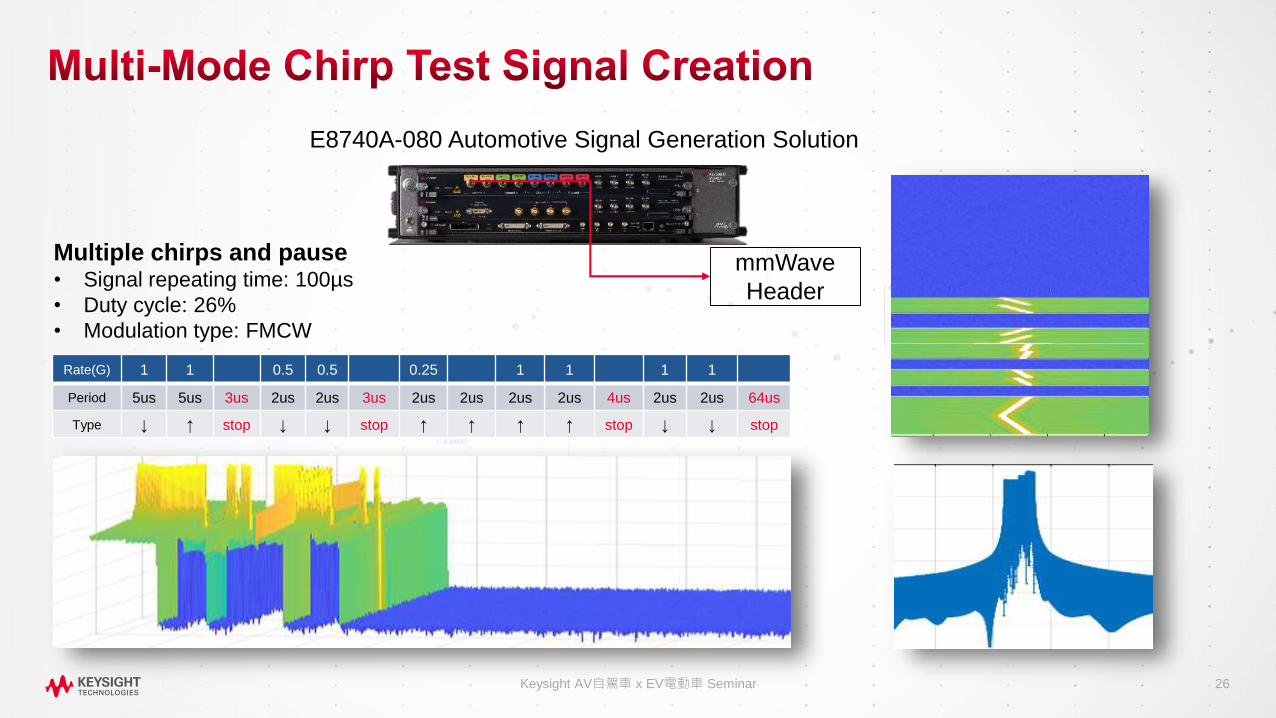
26
Multiple chirps and pause• Signal repeating time: 100µs
• Duty cycle: 26%
• Modulation type: FMCW
Rate(G) 1 1 0.5 0.5 0.25 1 1 1 1
Period 5us 5us 3us 2us 2us 3us 2us 2us 2us 2us 4us 2us 2us 64us
Type ↓ ↑ stop ↓ ↓ stop ↑ ↑ ↑ ↑ stop ↓ ↓ stop
E8740A-080 Automotive Signal Generation Solution
mmWave
Header
Keysight AV自駕車 x EV電動車 Seminar

27Keysight AV自駕車 x EV電動車 Seminar

28
E 8 7 4 0 A - 0 4 0 A N A LY S I S S O L U T I O N
Transmitter Conformance Requirements
• Operating Frequency range
• Mean Power (EN 301 091-1)
• Mean Power spectral density (EN 302-
264)
• Peak Power
• Unwanted emission in the out-of-band
domain
• Unwanted emission in the spurious
domain Keysight AV自駕車 x EV電動車 Seminar

29
4.3.1.2 Description (ETSI EN 303 396 [1], clause 6.2.2)
The operating frequency range is the frequency
range over which the equipment is transmitting. The
occupied frequency range of the equipment is
determined by the lowest (fL) and highest frequency
(fH) as occupied by the power envelope.
4.3.1.4 Conformance (clause 6.3.2 of ETSI EN 303 396 [1])
A spectrum analyzer with the following settings is used
as measuring receiver in the test set-up described in
clause 5:
• Resolution Bandwidth: 1 MHz
• Detector mode: RMS
• Display mode: Maxhold
E T S I E N 3 0 1 0 9 1 - 1 V 2 . 1 . 1 ( 2 0 1 7 - 0 1 ) 7 6 ~ 7 7 G H Z
Keysight AV自駕車 x EV電動車 Seminar
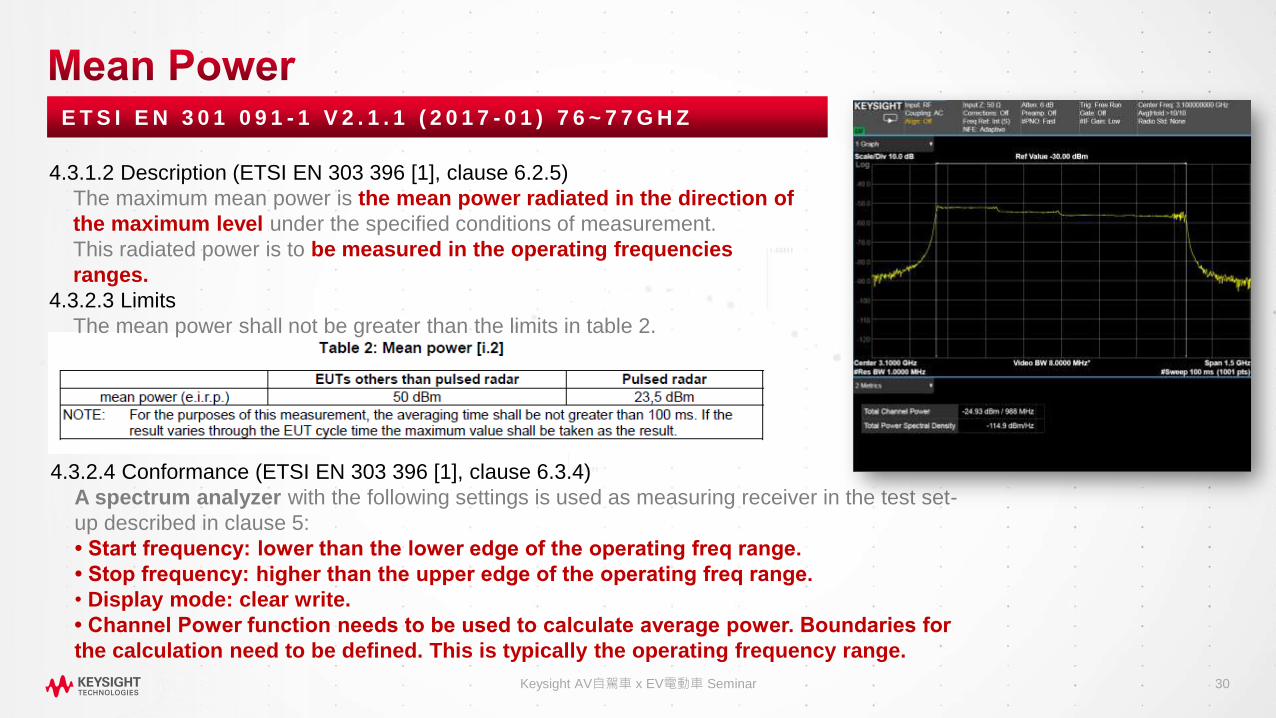
30
4.3.1.2 Description (ETSI EN 303 396 [1], clause 6.2.5)
The maximum mean power is the mean power radiated in the direction of
the maximum level under the specified conditions of measurement.
This radiated power is to be measured in the operating frequencies
ranges.
4.3.2.3 Limits
The mean power shall not be greater than the limits in table 2.
4.3.2.4 Conformance (ETSI EN 303 396 [1], clause 6.3.4)
A spectrum analyzer with the following settings is used as measuring receiver in the test set-
up described in clause 5:
• Start frequency: lower than the lower edge of the operating freq range.
• Stop frequency: higher than the upper edge of the operating freq range.
• Display mode: clear write.
• Channel Power function needs to be used to calculate average power. Boundaries for
the calculation need to be defined. This is typically the operating frequency range.
E T S I E N 3 0 1 0 9 1 - 1 V 2 . 1 . 1 ( 2 0 1 7 - 0 1 ) 7 6 ~ 7 7 G H Z
Keysight AV自駕車 x EV電動車 Seminar

31
4.3.3.2 Description (ETSI EN 303 396 [1], clause 6.2.4)
The radiated peak power (e.i.r.p.) is the highest instantaneous
power radiated by the equipment. It is measured in the permitted
range of operating frequencies.
4.3.3.4 Conformance (ETSI EN 303 396 [1], clause 6.3.3)
A spectrum analyzer with the following settings is used as
measuring receiver in the test set-up described in clause 5:
• Resolution bandwidth: 1 MHz for EUT with a frequency
sweep rate less than < 1 000 MHz/ms.
NOTE: For EUT with a higher frequency sweep rate, the RBW
has to be increased until a stable peak power reading is obtained.
• Detector mode: Peak or auto peak detector.
• Display mode: Maxhold.
• Sweep time: averaging time × number of sweep points.
The peak power to be considered is the maximum value
recorded.
E T S I E N 3 0 1 0 9 1 - 1 V 2 . 1 . 1 ( 2 0 1 7 - 0 1 ) 7 6 ~ 7 7 G H Z
Keysight AV自駕車 x EV電動車 Seminar

32
E 8 7 4 0 A A U T O M O T I V E R A D A R T E S T S O L U T I O N
Transmitter Conformance RequirementsUnwanted emission in the out-of-band domain
Unwanted emission in the spurious domain
Receiver Conformance RequirementsReceiver spurious emissions
Keysight AV自駕車 x EV電動車 Seminar

33
4.3.4.2 Description (ETSI EN 303 396 [1], clause 6.2.11)
OOB emissions are emissions on a frequency or frequencies immediately outside the necessary
bandwidth, resulting from the modulation process, but excluding spurious emissions.
• fC = (fL+ fH) / 2
• F1 = fC - (2,5 × (fH - fL))
• F2 = fC + (2,5 × (fH - fL))
4.3.4.3 Limits
The RMS mean power spectral density radiated in the calculated out-of-band domain
(between F1 to fL and fH to F2 band) shall not be greater than the values given in table 4.
4.3.4.4 Conformance (ETSI EN 303 396, clause 6.3.10)
• Resolution bandwidth (RBW):
• 100 kHz between 30MHz and 1 GHz.
• 1 MHz above 1 GHz.
• Detector mode:
• Quasi-peak between 30 MHz and 1 GHz.
• RMS > 1 GHz.
E T S I E N 3 0 1 0 9 1 - 1 V 2 . 1 . 1 ( 2 0 1 7 - 0 1 ) 7 6 ~ 7 7 G H Z
F1= 76.5GHz - 2.5 × 0.988GHz =73.112GHzF2 = 76.5GHz + 2.5 × 0.988GHz =78.052GHz
Keysight AV自駕車 x EV電動車 Seminar

34
60-90 GHz
140-220 GHz
220-330 GHz
90-140 GHz
N9041B UXA
Signal
Analyzer
30MHz-60 GHz @
E8740A-090 Automotive Emission Test up to ~330GHz
Sw
itchin
g
Box
Keysight AV自駕車 x EV電動車 Seminar

35
E8740A-090
H/W
configuration
Spurious
emission
spectrum
DC~330 GHz
X-SA
spectrum
Keysight AV自駕車 x EV電動車 Seminar

36
E8740A-040 Analysis Solution
Keysight AV自駕車 x EV電動車 Seminar
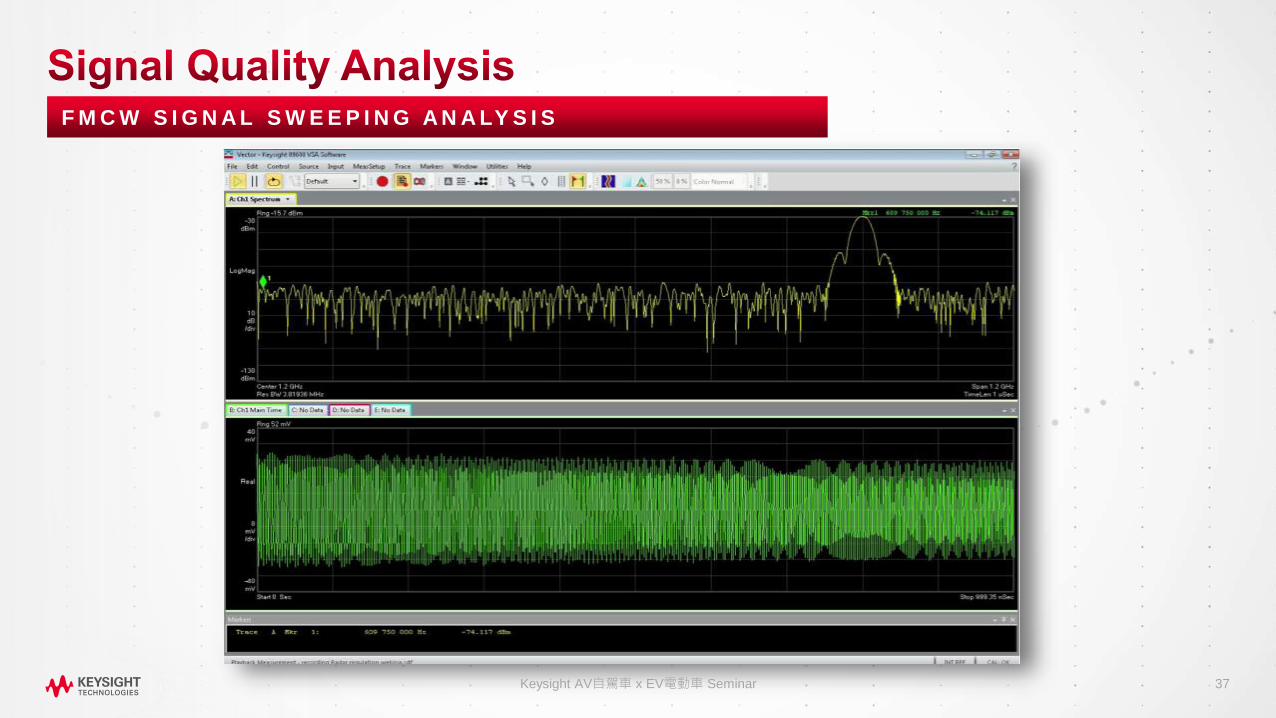
37
F M C W S I G N A L S W E E P I N G A N A LY S I S
Keysight AV自駕車 x EV電動車 Seminar

38
F M C H I R P S P E C T R O G R A M A N A LY S I S
Keysight AV自駕車 x EV電動車 Seminar

39
F M C H I R P L I N E A R I T Y A N A LY S I S
Keysight AV自駕車 x EV電動車 Seminar

40
E 8 7 4 0 A A U T O M O T I V E R A D A R T E S T S O L U T I O N
Keysight AV自駕車 x EV電動車 Seminar

41
… A N D W H AT D O E S T H I S M E A N F O R T E S T I N G ?
ETSI Group discussed test setup
CW
Noise
FMCW
Pulse
PMCW
OFDM
Custom waveform….
Victim Radar
A. Interferer is located at the boresight of victim radar
B. RTS is located at the boresight of victim Radar
C. RTS and interfere are located at the boresight of victim radar
Keysight AV自駕車 x EV電動車 Seminar

42Keysight AV自駕車 x EV電動車 Seminar

43
E8740A-040 Analysis Solution
KS83ST0A test S/W for ETSI
Keysight AV自駕車 x EV電動車 Seminar

44
Keysight KS83ST0A automation platform for automotive radar – transmission and emission tests works
with the KS83200A basic package to offer standards-compliant routines for testing and validation of
radar transceivers. Its automated routines simplify programming, customization and testing.

45
• The Review of Automotive Radar RF Regulatory Test standard
• FCC/ETSI/TELEC/GB/ARIB
• ETSI test items and Change History
• Automotive Radar RF Regulatory Measurement Setup and Test Procedure
• Sweep time needs to be align with signal repeating time of radar signal
• Can get more constant result with trigger and time gating setting
• ETSI Test set up requirement
• How to create Automotive radar test signal
• Conformance Test and correct parameter setting
• Automotive Radar Functional Test
• Automotive Radar Signal Quality Measurement
• Receiver/Interference Test
A U T O M O T I V E R A D A R S TA N D A R D A N D R E G U L AT I O N T E S T I N G
Keysight AV自駕車 x EV電動車 Seminar

46Keysight AV自駕車 x EV電動車 Seminar

47
K E Y S I GH T AU TOM OT I V E P R OD U C T P OR T F OL I O
PNA Network
Analyzers
Banded mmW Solution
E8740A-060 Radar
Signal Analysis
E8267D PSG Vector
Signal Generator
ADS / SystemVue
Simulation SW
M8190A Arbitrary
Waveform Generator
E8708A Radar
Target Simulator
Design Development Validation & Mfg.
89600 VSA SW
with FMCW and
PMCW Signal
Studio IQTools
Signal Studio
for Pulse
Building
Signal
Source
Analyzer
E-Band Power
Sensor and
Meter
Multi-targets
E8718A RTSE8740A-080 Radar
Interference Test
Automotive Radar
CATR Chamber
Keysight AV自駕車 x EV電動車 Seminar

48
S E E A N D H E A R T H E L AT E S T A N D G R E AT E S T F R O M I N D U S T R Y E X P E R T S
Dedicated Short-Range Communications
(DSRC)/ITS-G5
5G/LTE Cellular V2X (C-V2X)
e-Call
Radar Signal Analysis
Radar Signal Generation
Radar Target Simulator
SystemVue Radar Simulation Library
Scienlab EV Test Solutions
Battery Test Systems
HEV/EV Power Converter
Transceiver (Tx) Compliance
Receiver (Rx) Compliance
Link Segment (Lx) Solution
Ixia Level 2-7 Network and Application Testing
Keysight AV自駕車 x EV電動車 Seminar

49
F I N D T H E L AT E S T A N D G R E AT E S T F R O M I N D U S T R Y E X P E R T S
Automotive & Energy Solutions
Realize Your Vision Of Mobility Keysight.com/find/automotive
Keysight AV自駕車 x EV電動車 Seminar

50
Thank You
Keysight AV自駕車 x EV電動車 Seminar





























