Embed Size (px)
Citation preview
[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap and Jackknife
• in Statistics, we deal with the difficulty of finding the distribution /
standard errors of uncommon test statistics
• Bootstrap and Jackknife are general recipes to attack this problem
• Bootstrap offers much more, as we will find out
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 1

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Plug-in Estimators I
• we have independent observations Xn := (X1, X2, . . . , Xn) from an
unknown density f(·) with c.d.f. F (·)
• want to estimate an interesting feature of the distribution θ = T (F ), where
T (·) is a function of the c.d.f., e.g.,
– mean: if θ = E(X1) =∫xf(x) dx =
∫x dF (x) then T (G) =
∫x dG(x),
where G(·) is any c.d.f.
– median: if θ = F−1(0.5) then T (F ) = G−1(0.5), where G(·) is any c.d.f.
• say Fn(·) is the empirical c.d.f. of the data Xn, i.e., Fn(·) puts mass 1/n on
each of the data points Xi, i = 1, 2, . . . , n
• then one could use the plug-in estimator of θ: θn := T (Fn) = t(Xn), e.g.,
– mean: if T (F ) =∫x dG(x) then
T (Fn) =∫x dFn(x) = 1
n
∑ni=1Xi = Xn = t(Xn), the sample mean
– median: if T (G) = G−1(0.5) then T (Fn) = F−1n (0.5) = t(Xn), the sample
median
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 2

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Plug-in Estimators II
• plug-in estimator of the variance:
θ = E(X1 − E(X1))2 = E(X2
1 ) − (E(X1))2
=
∫x2 dF (x) −
{∫x dF (x)
}2
= T (F ) and hence
T (Fn) =
∫x2 dFn(x) −
{∫x dFn(x)}
2
}=
1
n
n∑
i=1
X2i −
{1
n
n∑
i=1
Xi
}2
=1
n
n∑
i=1
(Xi − Xn)2 =
n− 1
ns2n
• note here E(T (Fn)) = n−1n E(s2n) = n−1
n θ 6= θ, i.e., the plug-in estimator is
biased
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 3

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap Principle
• inference on θ is usually based on the distribution of T (Fn) = t(Xn) or of
R(Xn, F ) := T ( bFn)−T (F )
S( bFn), where S(·) is a functional, which estimates
V ar(T (Fn)) or for other forms of R(Xn, F )
• both of the above distributions may be intractable and it also may depend
on the unknown F (·)
• bootstrap provides a way out using random bootstrap samples or pseudo-data
sets denoted by X ?n := (X?
1 , X?2 , . . . , X
?n), we’ll see how to generate these in a
bit
• let F ?n(·) be the empirical c.d.f. of the data X ?n , i.e., F ?n(·) puts mass 1/n on
each of the data points X?i , i = 1, 2, . . . , n
• since X ?n is randomly generated, F ?n(·) is a random variable
• now the bootstrap principle says that approximate the distribution of
– T (Fn) = t(Xn) by the bootstrap distribution of T (F ?n) = t(X ?n)
– R(Xn, F ) by the bootstrap distribution of R(X ?n , Fn)
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 4

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap Sample or Pseudo-data Set
• Non-parametric Bootstrap:
data world: Xn := (X1, X2, . . . , Xn), Xii.i.d.∼ F (·), i = 1, 2, . . . , n
bootstrap world: X ?n := (X?
1 , X?2 , . . . , X
?n), X
?ii.i.d.∼ Fn(·), i = 1, 2, . . . , n
here the pseudo-data set is a simple random sample of size n with
replacement from Xn := (X1, X2, . . . , Xn)
• Parametric Bootstrap: let θ and θn be a parameter and it’s reasonable
estimator below (may not necessarily be the plug-in estimator!)
data world: Xn := (X1, X2, . . . , Xn), Xii.i.d.∼ F (·, θ), i = 1, 2, . . . , n
bootstrap world: X ?n := (X?
1 , X?2 , . . . , X
?n), X
?ii.i.d.∼ F (·, θn), i = 1, 2, . . . , n
here the pseudo-data set is a random sample of size n from F (·, θn)
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 5

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap Distribution
• note that both in non-parametric and in parametric bootstrap, the bootstrap
samples are generated “using” the observed data Xn, i.e., conditioned on Xn
• for non-parametric bootstrap the number of possible bootstrap samples is
nn(≈ ∞, for large n)
• for parametric bootstrap the number of possible bootstrap samples is ∞
• since it’s not possible or efficient to consider all possible bootstrap samples
we work with B-many bootstrap samples
X ?n,b = {X?
1,b, X?2,b, . . . , X
?n,b}, b = 1, 2, . . . , B
• then the bootstrap distribution of T (F ?n) = t(X ?n) and of R(X ?
n , Fn) can be
approximated by the following empirical distributions of
G?B,T (·) is the c.d.f. of{T (F ?n,b) = t(X ?
n,b) | b = 1, 2, . . . , B}
and
G?B,R(·) is the c.d.f. of{R(X ?
n,b, Fn) | b = 1, 2, . . . , B}
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 6

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap Standard Error
• let us consider the problem of estimating θ = T (F ) by the plug-in estimator
T (Fn) = t(Xn), say
• interested in the standard error of the estimator T (Fn), i.e., we want to
estimate
√V arF (T (Fn)) =
√V arF (t(Xn))
• use the sample standard deviation of the c.d.f. G?B,T (·) or of the (bootstrap
sample) evaluations {t(X ?n,b) | b = 1, 2, . . . , B} as an estimator of√
V arF (T (Fn)) =√V arF (t(Xn)):
seboot,B(t) =
{1
B − 1
B∑
b=1
(t(X ?
n,b) − t?B)2
}1/2
where t?B =1
B
B∑
b=1
t(X ?n,b)
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 7

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Non-parametric Bootstrap: Regression I
• the model: Yi = XTi β + εi, i = 1, 2, . . . , n
• want the standard error of βOLS
• define Zi := (XTi , Yi), i = 1, 2, . . . , n
• generate B-many pseudo-data sets Z?n,b = {Z?1,b, Z
?2,b, . . . , Z
?n,b} by sampling
with replacement from {Z1, Z2, . . . , Zn} randomly
• for b = 1, 2, . . . , B, regress (OLS) {Y ?i,b | i = 1, 2, . . . , n} on
{X?Ti,b | i = 1, 2, . . . , n} to get β?b = t(Z?
n,b), say
• now compute bootstrap standard error seboot,B(t), to get the standard error
of βOLS
• this is also called paired bootstrapping
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 8

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Non-parametric Bootstrap: Regression II
• the model: Yi = XTi β + εi, i = 1, 2, . . . , n
• want standard error of βOLS
• the (OLS) estimated model: Yi = XTi βOLS + εi, i = 1, 2, . . . , n
• generate pseudo-data sets E?n,b = {ε?1,b, ε?2,b, . . . , ε
?n,b} by sampling with
replacement from {ε1, ε2, . . . , εn} randomly
• now define Z?i = (Y ?i := XTi βOLS + ε?i , Xi) and form
Z?n,b = {Z?1,b, Z
?2,b, . . . , Z
?n,b}
• for b = 1, 2, . . . , B, regress (OLS) {Y ?i,b | i = 1, 2, . . . , n} on
{Xi | i = 1, 2, . . . , n} to get β?b = t(Z?n,b), say
• now compute bootstrap standard error seboot,B(t), to get the standard error
of βOLS
• this is also called bootstrapping the residuals
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 9

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Parametric Bootstrap: Gamma model
• the model: Yii.i.d.∼ Γ(α, 1), i = 1, 2, . . . , n
• want the standard error of αMLE
• note αMLE is gotten by numerically solving the “score equation”
• generate B-many pseudo-data sets Y?n,b = {Y ?1,b, Y?2,b, . . . , Y
?n,b} by drawing
independently from the distribution Γ(αMLE, 1)
• now compute bootstrap standard error seboot,B(t), to get the standard error
of αMLE
• this is preferable than the non-parametric version if we strongly believe that
the data generation process, which is a Γ(·, 1) distribution here
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 10

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap Estimate Of Bias
• let us consider the problem of estimating θ = T (F ) by the plug-in estimator
T (Fn) = t(Xn) = θn
• want to estimate the bias in estimation:
EF (θn) − θ = EF (t(Xn)) − θ = EF (T (Fn)) − T (F ) = R(Xn, F ), say
• we estimate it by:
R(X ?n , Fn) = E bFn
(T (F ?n)) − T (Fn) = E bFn(t(X ?
n)) − t(Xn) = E bFn(θ?n) − θn
• use the c.d.f. G?B,R(·) or the (bootstrap sample) evaluations
{t(X ?n,b) = θ?n,b | b = 1, 2, . . . , B} to approximate by E bFn
(T (F ?n)) − θn
biasboot,B(t) :=1
B
B∑
b=1
t(X ?n,b) − t(Xn) =
1
B
B∑
b=1
θ?n,b − θn
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 11
[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Jackknife I• we have independent observations Xn := (X1, X2, . . . , Xn) from an
unknown density f(·) with c.d.f. F (·),
• consider the problem of estimating θ = T (F ) using θn = t(Xn)
• form the “leave-one” data sets:
X(−i) := {Xj | j = 1, 2, . . . , n, j 6= i}, i = 1, 2, . . . , n
• define θ(−i) = t(X(−i)), i = 1, 2, . . . , n and θ(·) = 1n
∑ni=1 θ(−i)
• then the Jackknife estimate of the bias EF (θn) − θ = EF (t(Xn)) − θ is given
by:
biasjack(t) = (n− 1)(θ(·) − θn)
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 12

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Jackknife II• then the Jackknife estimate of the standard error√
V arF (θn) =√V arF (t(Xn)) is given by:
sejack(t) =
{n− 1
n
n∑
i=1
(θ(−i) − θ(·)
)2}1/2
• why do the formulas for biasjack(t) and sejack(t) make sense?
– define the pseudo-values θi := nθn − (n− 1)θ(−i), i = 1, 2, . . . , n and their
mean ¯θ = 1
n
∑ni=1 θi
– now note,
biasjack(t) = (n− 1)(θ(·) − θn) = θn −¯θ and
sejack(t) =
{n− 1
n
n∑
i=1
(θ(−i) − θ(·)
)2}1/2
=
{1
n(n− 1)
n∑
i=1
(θi −
¯θ)2
}1/2
(1)
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 13

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Jackknife III• note if θn = Xn, the sample mean then θi = Xi, i = 1, 2, . . . , n and ¯
θ = Xn
• here the above formulas in equation (1) become
biasjack(t) = θn −¯θ = 0 and
sejack(t) =
{1
n(n− 1)
n∑
i=1
(θi −
¯θ)2
}1/2
=
{1
n(n− 1)
n∑
i=1
(Xi − Xn
)2
}1/2
• thus the formulas in equation (1) “does the right thing” in case of θn = Xn
• hope is they will do a good job for a general statistic θn as well
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 14
[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap Confidence Intervals I
• let us consider the problem of estimating θ = T (F ) by the plug-in estimator
T (Fn) = t(Xn) = θn, say
• let R(Xn, F ) := T ( bFn)−T (F )
S( bFn)be roughly “pivotal” for the problem, (i.e. we
expect the distribution of R(Xn, F ) under F (·) to be free of θ)
• want a 100(1 − α)% confidence interval for θ
• let we have the c.d.f.s G?B,T (·) and G?B,R(·) from B-many pseudo-data sets
X ?n,b = {X?
1,b, X?2,b, . . . , X
?n,b}
• let, in general, ζγ(G) denote the γ-th percentile of the c.d.f.: G(·), γ ∈ (0, 1)
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 15
[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap Confidence Intervals II
• then one could use one of three kinds of confidence intervals:
– Percentile interval: the most basic one:
[ζα/2(G
?B,T ), ζ1−α/2(G
?B,T )
]
– Accelerated bias-corrected percentile interval or BCa interval:
percentile based but has better coverage:
[ζβ1
(G?B,T ), ζβ2(G?B,T )
],
where β1, β2 ∈ (0, 1) and have complicated expressions, we’ll see later
– Bootstrap t interval: in case we have a rough pivot:
[T (Fn) − S(Fn)ζ1−α/2(G
?B,R), T (Fn) − S(Fn)ζα/2(G
?B,R)
]
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 16

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Percentile Interval I• H(·) is a continuous and symmetric (around 0) distribution
• let ψ(·) be a continuous, strictly increasing transformation such that
ψ(θn) − ψ(θ) ∼ H(·), e.g. ψ(·) could be a normalizing transformation
• then we have, by symmetry of H(·):
Phζα/2(H) ≤ ψ(bθn) − ψ(θ) ≤ ζ1−α/2(H)
i= 1 − α (2)
=⇒ Phψ
−1(−ζ1−α/2(H) + ψ(bθn)) ≤ θ ≤ ψ−1(−ζα/2(H) + ψ(bθn))
i= 1 − α
=⇒ Phψ
−1(ζα/2(H) + ψ(bθn)) ≤ θ ≤ ψ−1(ζ1−α/2(H) + ψ(bθn))
i= 1 − α (3)
• using the bootstrap principle on equation (2) we have,
P?
hζα/2(H) ≤ ψ(bθ?
n) − ψ(bθn) ≤ ζ1−α/2(H)i
≈ 1 − α
=⇒ P?
hψ
−1(ζα/2(H) + ψ(bθn)) ≤ bθ?n ≤ ψ
−1(ζ1−α/2(H) + ψ(bθn))i≈ 1 − α (4)
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 17
[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
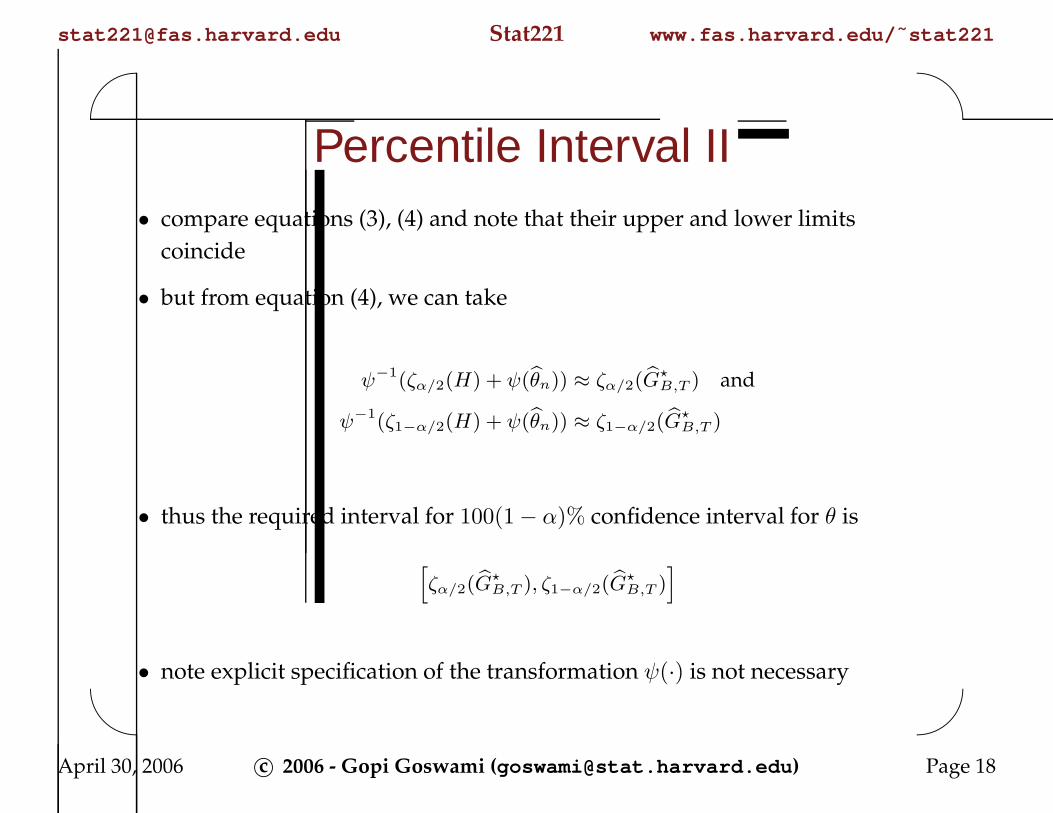
Percentile Interval II• compare equations (3), (4) and note that their upper and lower limits
coincide
• but from equation (4), we can take
ψ−1(ζα/2(H) + ψ(bθn)) ≈ ζα/2( bG?
B,T ) and
ψ−1(ζ1−α/2(H) + ψ(bθn)) ≈ ζ1−α/2( bG?
B,T )
• thus the required interval for 100(1 − α)% confidence interval for θ is
hζα/2( bG?
B,T ), ζ1−α/2( bG?B,T )
i
• note explicit specification of the transformation ψ(·) is not necessary
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 18

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
BCa Interval I
• let ψ(·) be a continuous, strictly increasing transformation and a, b ∈ R1 such
that 1 + aψ(θ) > 0 and
U :=ψ(bθn) − ψ(θ)
1 + aψ(θ)+ b ∼ Normal1(0, 1)
• note a = b = 0 takes us back to the simple percentile method
• with zγ denote the γ-th percentile of the Normal1(0, 1) distribution we
have,
Pˆzα/2 ≤ U ≤ z1−α/2
˜= 1 − α (5)
=⇒ Phk1(a, b, 1 − α/2, bθn) ≤ θ ≤ k1(a, b, α/2, bθn)
i= 1 − α, where (6)
k1(a, b, γ, bθn) = ψ−1
ψ(bθn) +
(b− zγ)[1 + aψ(bθn)]
1 − a(b− zγ)
!
(7)
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 19
[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
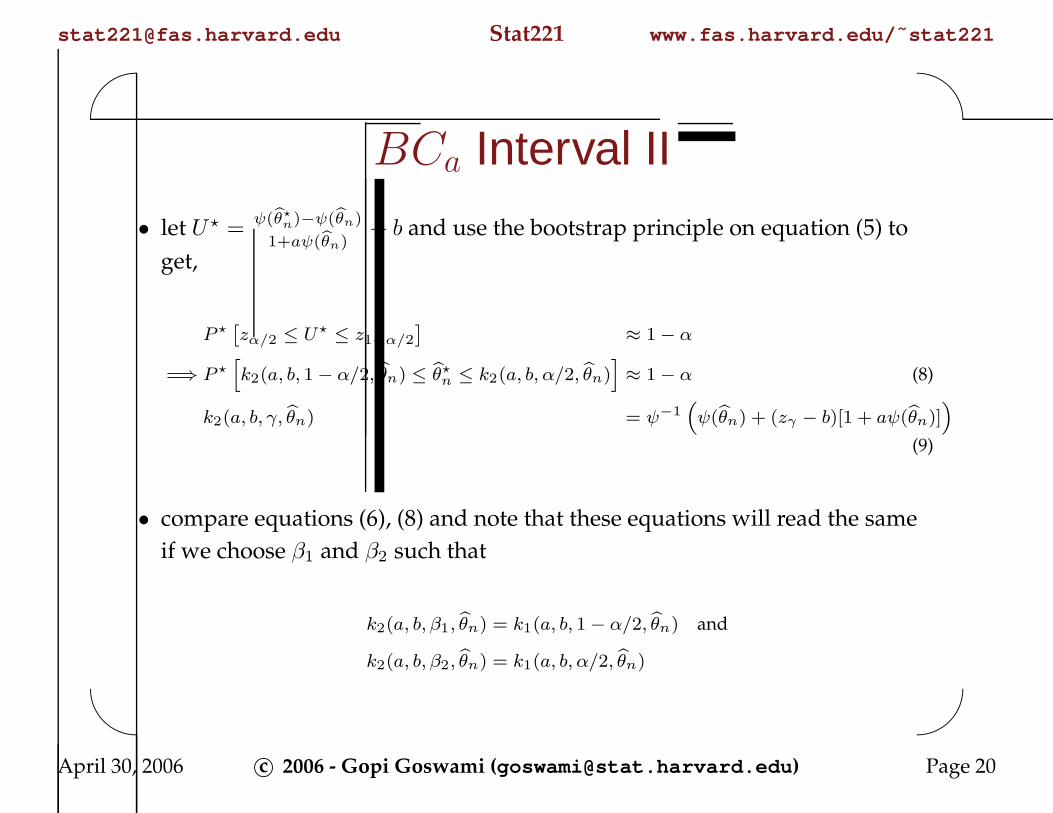
BCa Interval II
• let U? =ψ(bθ?
n)−ψ(bθn)
1+aψ(bθn)+ b and use the bootstrap principle on equation (5) to
get,
P ?ˆzα/2 ≤ U? ≤ z1−α/2
˜≈ 1 − α
=⇒ P ?hk2(a, b, 1 − α/2, bθn) ≤ bθ?
n ≤ k2(a, b, α/2, bθn)i≈ 1 − α (8)
k2(a, b, γ, bθn) = ψ−1
“ψ(bθn) + (zγ − b)[1 + aψ(bθn)]
”
(9)
• compare equations (6), (8) and note that these equations will read the same
if we choose β1 and β2 such that
k2(a, b, β1, bθn) = k1(a, b, 1 − α/2, bθn) and
k2(a, b, β2, bθn) = k1(a, b, α/2, bθn)
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 20

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
BCa Interval III
• choice of β1 boils down to (below Φ(·) is the c.d.f. of the Normal1(0, 1)
distribution):
ψ−1
“ψ(bθn) + (zβ1
− b)[1 + aψ(bθn)]”
= ψ−1
ψ(bθn) +
(b− z1−α/2)[1 + aψ(bθn)]
1 − a(b− z1−α/2)
!
⇐⇒zβ1− b =
(b− z1−α/2)
1 − a(b− z1−α/2)⇐⇒ β1 = Φ
b+
b− z1−α/2
1 − a(b− z1−α/2)
!
• similarly, we get, β2 = Φ(b+
b−zα/2
1−a(b−zα/2)
)
• but from equation (8), we can take
k2(a, b, β1, bθn) ≈ ζβ1( bG?
B,T ) and
k2(a, b, β2, bθn) ≈ ζβ2( bG?
B,T )
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 21

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
BCa Interval IV
• thus the required interval for 100(1 − α)% confidence interval for θ is
hζβ1
( bG?B,T ), ζβ2
( bG?B,T )
i
• note, both β1 and β2 depends on a and b and usually one takes
b = Φ−1(G?B,T (θn)
)and
a =
∑ni=1 τ
3i
6 (∑ni=1 τ
2i )
3/2where
τi = θ(·) − θ(−i) remember jackknife!
• note explicit specification of the transformation ψ(·) is not necessary
• this method just “corrects the percentiles”, i.e. uses β1 and β2 instead of
1 − α2 and α/2 from the percentile method
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 22
[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
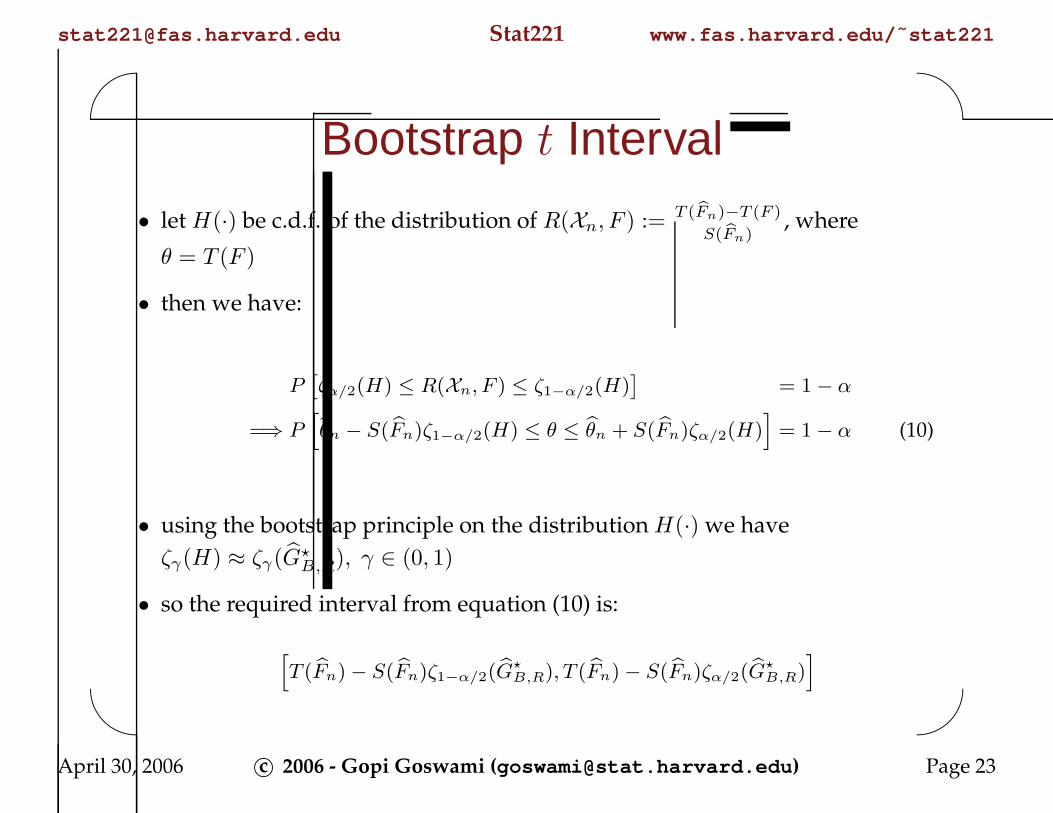
Bootstrap t Interval
• let H(·) be c.d.f. of the distribution of R(Xn, F ) := T ( bFn)−T (F )
S( bFn), where
θ = T (F )
• then we have:
Pˆζα/2(H) ≤ R(Xn, F ) ≤ ζ1−α/2(H)
˜= 1 − α
=⇒ Ph
bθn − S( bFn)ζ1−α/2(H) ≤ θ ≤ bθn + S( bFn)ζα/2(H)i
= 1 − α (10)
• using the bootstrap principle on the distribution H(·) we have
ζγ(H) ≈ ζγ(G?B,R), γ ∈ (0, 1)
• so the required interval from equation (10) is:
hT ( bFn) − S( bFn)ζ1−α/2( bG?
B,R), T ( bFn) − S( bFn)ζα/2( bG?B,R)
i
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 23

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap vs. Jackknife I
• the set up (from problem 4 on problem set 5):
– let we have Xn := (X1, X2, . . . , Xn)i.i.d.∼ f(·) with c.d.f. F (·)
– let we have a linear statistic of the form θn = µ+ 1n
∑ni=1 α(Xi)
• you showed that for this statistic that the variance of the ideal bootstrap
estimator V ar bFn(θ?n) and that of the jackknife estimator V arjack(θ
?n) differ
by only a factor of n−1n
• let we have a quadratic statistic of the form
θn = µ+ 1n
∑1≤i≤n α(Xi) + 1
n2
∑1≤i<j≤n β(Xi, Xj)
• the ideal bootstrap bias estimate, E bFn(θ?n) − θn and the jackknife bias
estimate, biasjack(t) differ by only a factor of n−1n
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 24
[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
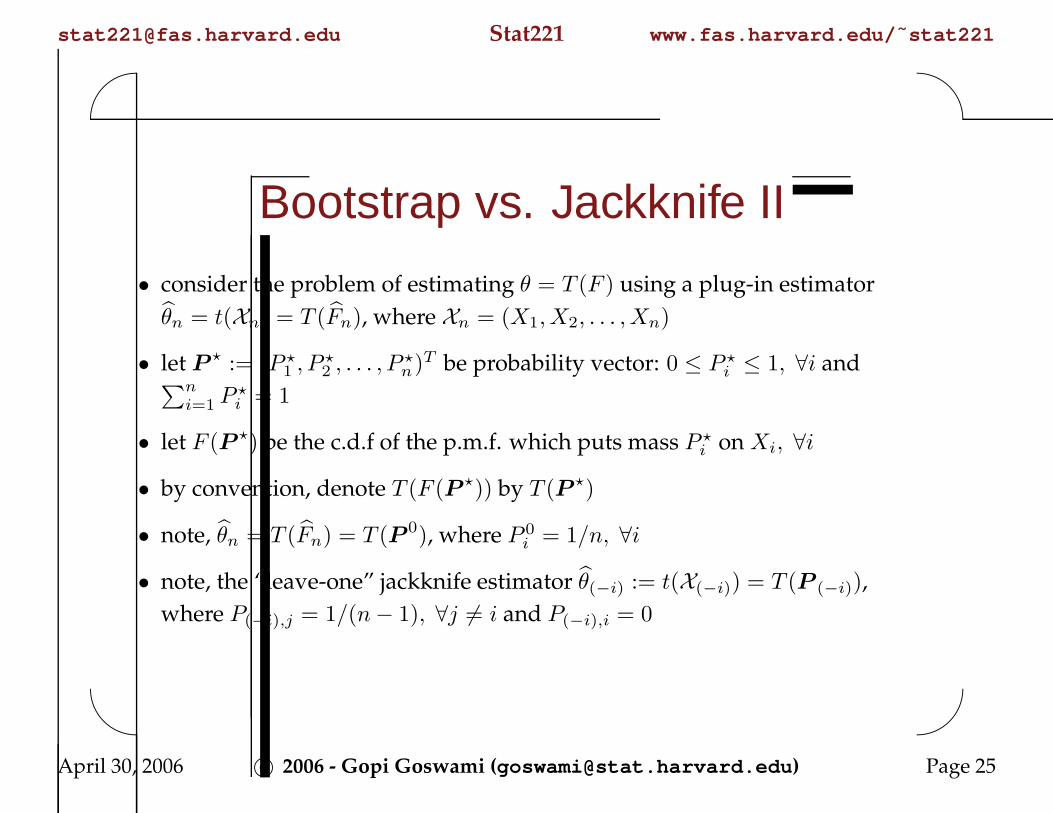
Bootstrap vs. Jackknife II
• consider the problem of estimating θ = T (F ) using a plug-in estimator
θn = t(Xn) = T (Fn), where Xn = (X1, X2, . . . , Xn)
• let P ? := (P ?1 , P?2 , . . . , P
?n)T be probability vector: 0 ≤ P ?i ≤ 1, ∀i and∑n
i=1 P?i = 1
• let F (P ?) be the c.d.f of the p.m.f. which puts mass P ?i on Xi, ∀i
• by convention, denote T (F (P ?)) by T (P ?)
• note, θn = T (Fn) = T (P 0), where P 0i = 1/n, ∀i
• note, the “leave-one” jackknife estimator θ(−i) := t(X(−i)) = T (P (−i)),
where P(−i),j = 1/(n− 1), ∀j 6= i and P(−i),i = 0
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 25

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap vs. Jackknife III
• consider the random variable P ? such that
n · P ? ∼ Multinomial(n,P 0)
• recall, a non-parametric bootstrap sample or pseudo-data set
X ?n := (X?
1 , X?2 , . . . , X
?n) is generated by X?
ii.i.d.∼ Fn(·), i = 1, 2, . . . , n
• the above procedure is equivalent to the following, which uses P ?:
generate M? := n · P ? ∼ Multinomial(n,P 0)
set X ?n = {M?
i many copies of Xi}, why?
thus F ?n = F (P ?)
• thus we have, θ?n = t(X ?n) = T (F ?n) = T (F (P ?)) = T (P ?)
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 26

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap vs. Jackknife IV
• “jackknife is linearized bootstrap” in the following sense:
Theorem 0.1. Let us consider the problem of estimating θ = T (F ) by the plug-in
estimator T (Fn) = t(Xn) = θn. Here, θn may not a linear statistic. We know,
V arjack(t) =n− 1
n
n∑
i=1
(θ(−i) − θ(·)
)2
Let TLIN (P ?) := c0 + (P ? − P 0)TU , where∑n
i=1 Ui = 0 (so that only n among
c0,U are free to vary) be a linear statistic. So, TLIN (P ?) is a hyperplane defined
on the n-dimensional simplex,
Sn := {x ∈ Rn | 0 ≤ xi ≤ 1, i = 1, 2, . . . , n,
∑ni=1 xi = 1}. Solve for c0,U
under the n conditions T (P (i)) = θ(−i), i = 1, 2, . . . , n to get TLIN,bθn(P ?), the
“linearized” version of θ?n. Then, for the ideal bootstrap variance of TLIN,bθn(P ?),
we have
V ar(TLIN,bθn(P ?)) =
n− 1
nV arjack(t)
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 27

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap vs. Jackknife V
• the set up (from problem 3 on problem set 5):
– let d > 1 and X = (X1, X2, . . . , Xd)T ∼ Normald(µ, Id), where
µj = j, j = 1, 2, . . . , d and Id is the d-dimensional identity matrix
– consider n independent copies
Xi = (Xi,1, Xi,2, . . . , Xi,d)T , i = 1, 2, . . . , n of X
– let ζ1,j := V ar( 1n
∑ni=1Xi,j) and ζ2,j := V ar
(1n
∑ni=1X
2i,j
)and define
ζk := (ζk,1, ζk,2, . . . , ζk,d)T , k = 1, 2.
• note
V arF (ζboot,k,B,n) = V arF (E bFn(ζboot,k,B,n | Xn)) +EF (V ar bFn
(ζboot,k,B,n | Xn))
= V arF (ζk,n) + EF (V ar bFn(ζboot,k,B,n | Xn))
if E bFn(ζboot,k,B,n | Xn) = ζk,n
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 28

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap vs. Jackknife VI
• thus bootstrap introduces the extra source of variation, called the cushion
error, EF (V ar bFn(ζboot,k,B,n | Xn)) due to finite re-sampling (of size B) from
all possible bootstrap samples, see [4, Yatracos, 2002]
• the performance of ζboot,k,B,n will depend on the estimand (compare
ζboot,1,B,n and ζboot,2,B,n) and the dimension of the problem (e.g., compare
ζboot,1,B,n for different values of the underlying d) since the both of these
factors will contribute to the cushion error
• note for jackknife, the cushion error EF (V ar bFn(ζjack,k,n | Xn)) = 0, since
given a sample Xn, there is only one jackknife estimator ζjack,k,n!
• thus if we either use ζn or ζjack,k,n instead of ζboot,k,B,n, then we’ll not be
paying for the cushion error
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 29

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
Bootstrap vs. Jackknife VII
• one way to bring the cushion error down is to use a very large value of B,
especially for large dimensions, so that V ar bFn(ζboot,k,B,n | Xn) is small
• another way to would be to only use biased set of bootstrap samples for
which the F ?n(·)’s lie “close” to the Fn(·) in some sense, see [3, Hall et. al.,
1999]
• the later method is also called biased-bootstrap or b-bootstrap
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 30

[email protected] Stat221 www.fas.harvard.edu/˜stat221'
&
$
%
References
[1] B. Efron. Bootstrap methods: Another look at the jackknife. The Annals of
Statistics, 7:1–26, 1979.
[2] Bradley Efron and Robert Tibshirani. An Introduction to the Bootstrap.
Chapman & Hall Ltd, 1993.
[3] Peter Hall and Brett Presnell. Intentionally biased bootstrap methods.
Journal of the Royal Statistical Society, Series B: Statistical Methodology,
61:143–158, 1999.
[4] Yannis G. Yatracos. Assessing the quality of bootstrap samples and of the
bootstrap estimates obtained with finite resampling. Statistics & Probability
Letters, pages 281–292, 2002.
April 30, 2006 c© 2006 - Gopi Goswami ([email protected] ) Page 31











![Bootstrap [Modo de Compatibilidade] - USPecologia.ib.usp.br/curso/2009/pdf/AO1/Bootstrap.pdf · Title: Microsoft PowerPoint - Bootstrap [Modo de Compatibilidade] Author: Cac�](https://img.dokumen.tips/doc/110x75/604571877c1b2b099e6993e0/bootstrap-modo-de-compatibilidade-title-microsoft-powerpoint-bootstrap-modo.jpg)





![RESEARCH ARTICLE Open Access Using jackknife to assess the ... · please see [18]. Bootstrap and jackknife Bootstrap is commonly used to assess the quality of sequence-based phylogenies](https://img.dokumen.tips/doc/110x75/5ed7b18f86e8a75e3f2993c5/research-article-open-access-using-jackknife-to-assess-the-please-see-18.jpg)











