-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAILINDEX
MARGARIDA BRITO, LAURA CAVALCANTE, AND ANA CRISTINA MOREIRA
FREITAS
Abstract. The estimation of the tail index is a central topic in
extreme value analy-sis. We consider a geometric-type estimator for
the tail index and study its asymptoticproperties. We propose here
two asymptotic equivalent bias-corrected geometric-typeestimators
and establish the corresponding asymptotic behaviour. We also apply
thesuggested estimators to construct asymptotic confidence
intervals for this tail parame-ter. Some simulations in order to
illustrate the finite sample behaviour of the proposedestimators
are provided.
1. Introduction
We consider the problem of estimating the Pareto-tail index of a
distribution functionF , with tail function F = 1−F ∈ RV−1/γ , γ
> 0, where RVα denotes the class of regularlyvarying functions
with index of regular variation equal to α, that is,
limt→∞
F (tx)
F (t)= x−1/γ , for all x > 0.
Equivalently,
(1) 1− F (x) = x−1/γ l (x) for x > 0,where l is a slowly
varying function at infinity, that is, l satisfies the condition l
(tx) /l (t)→1 as t → ∞ for all x > 0. Denoting by F−1 the left
continuous inverse of F , F−1 (s) =inf {y : F (y) ≥ s}, the
condition (1) is equivalent to the regular variation of the tail
functionU (x) = F−1 (1− 1/x), i.e.(2) U (x) = xγL (x) ,
where L is a slowly varying function at infinity. Our main goal
here is the estimationof γ, namely the construction of
bias-corrected asymptotically normal estimators,
usinggeometric-type estimators.
The class of distributions F verifying condition (1) plays an
important role in extremevalue statistics. The univariate extreme
value theory (EVT) and its applications is intro-duced and
developed in several general texts, such as, for instance in
Leadbetter et al.(1983) and Coles (2001). In order to provide the
theoretical background of our resultsin this context, we briefly
review some basic concepts and results from classic univariateEVT.
First, we recall that two distribution functions F1 and F2 are of
the same type if,for some constants a > 0 and b, F1(x) = F2(ax+
b), for all x. Consider now a sequence of
2010 Mathematics Subject Classification. Primary 62G32;
Secondary 62G30, 62E20, 62F12.Key words and phrases. Bias
reduction; extreme value theory; heavy tails; tail index
estimation.
1
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX 2
independent and identically distributed (i.i.d.) random
variables (r.v.) X1, X2, . . . withdistribution function (d.f.) F
and let X(1,n) ≤ X(2,n) ≤ · · · ≤ X(n,n) denote the corre-sponding
order statistics (o.s.) based on the n first observations. For
simplicity writeMn = X(n,n) and assume that there exist sequences
(an), an > 0 and (bn) such that
P (Mn ≤ anx+ bn) = Fn(anx+ bn)→ G(x),where G is a non degenerate
d.f.. If F satisfies the above condition, we say that F belongsto
the domain of attraction for maxima of G and write F ∈ DA(G).
According to theextremal types theorem, if F ∈ DA(G), then G must
have the same type as one of thefollowing three families
Type I: Λ(x) = exp (−e−x), x ∈ R;
Type II: Φα(x) =
{exp (−x−α), x > 0, α > 0,0, x ≤ 0,
Type III: Ψα(x) =
{exp (−(−x)α), x < 0, α > 0,1, x ≥ 0.
The three types of distributions are known as the Gumbel,
Fréchet and Weibull distri-butions, respectively.
This result for maxima may be viewed as a counterpart of the
Central Limit Theoremfor sums. Using the reparametrization of von
Mises, the above three types may be writtenin the following form,
called generalized extreme value distribution (GEV):
Gγ(x) = exp
(−(
1 + γ(x− µσ
)
)−1/γ), 1 + γ(
x− µσ
) > 0,
where, for γ = 0, G(x) = exp(− exp(−(x−µσ ))) and µ and σ > 0
are location and scaleparameters, respectively. The shape parameter
γ, widely known as the tail index orextreme value index, is a key
parameter in extreme value statistics, as it determines thegeneral
tail behaviour of the underlying d.f. F . The case where γ = 0,
corresponds to theGumbel family and the distributions belonging to
its domain of attraction have light ormoderate upper tails, such as
the exponential, gamma, normal or lognormal distributions.For γ =
−1/α < 0, corresponding to the Weibull family, the distributions
have moderateand short tails, with finite right endpoint, like the
uniform and beta distributions. Thesecond type of distributions,
where γ = 1/α > 0, corresponds to the Fréchet
family.Distributions with an upper heavy tail, such as, the
Student-t, loggamma, F, Pareto andBurr are well known examples of
distributions belonging to the domain of attraction formaxima of
this family.
The generalized Pareto distribution (GPD) is the other
fundamental class of distribu-tions in univariate extreme value
statistics, given by
Hγ(x) = 1− (1 + γx/σ)−1/γ , 1 + γx/σ > 0,where σ > 0 and,
for γ = 0, the above expression is again interpreted as the limit
of Hγas γ → 0, that is, H(x) = 1− exp(−x/σ).
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX 3
The GPD is related to the GEV, and arises as a limit
distribution for excesses over ahigh threshold u. More precisely,
there is a function σ() such that
limu→x0
sup0≤x≤x0−u
| P (X − u ≤ x | X > u)−Hγ,σ(u)(x) |= 0,
where x0 denotes the upper endpoint, if and only if F ∈ DA(Gγ).
The shape parameterγ is then the same for GEV and GPD and the GPD
class is also a reparametrization ofthree different families of
distributions, corresponding to the cases γ = 0, γ < 0 and γ
> 0,respectively.
Several characterisations of the domains of attraction have been
established. For in-stance, condition (1) is necessary and
sufficient for F ∈ DA(Gγ), γ > 0. Thus, thedistributions we
consider here, the Pareto-type distributions, belong to the domain
ofattraction of the heavy-tailed Fréchet distribution with tail
index γ.
The problem of estimating the tail index has received
considerable attention and com-mon applications may be found in a
big variety of domains such as in geology, hydrology,meteorology,
oceanography, economics, telecommunications and sociology. In
particular,we developed, in Brito, Cavalcante and Freitas (2015),
an important application in thefield of seismology, where we
estimate tail parameters of the seismic moment distribution.We also
mention here that the estimation of the tail index has a relevant
application to theestimation of the dimension of strange
attractors, including attractors of meteorologicalmodels. See for
example Lucarini et al. (2012) and Faranda et al. (2012).
Consider now intermediate sequences k = kn of positive integers
(1 ≤ k < n), that is
(3) k →∞, kn→ 0 as n→∞.
One of the most well known estimators for the tail index has
been suggested by Hill(1975) and is given by
Ĥ (k) =1
k
k∑
i=1
log X(n−i+1,n) − log X(n−k,n).
The asymptotic properties of the Hill estimator have been much
studied and it is wellknown that, under certain conditions, Ĥ is a
strongly consistent estimator (see, e.g.,Deheuvels et al. (1988))
with asymptotic normal distribution (see, e.g., Haeusler andTeugels
(1985)).
We recall that the above problem of tail index estimation of a
Pareto type distributionis equivalent to the estimation of the
exponential tail coefficient. Setting Zi = logXi,i = 1, 2, . . . ,
with Xi as above, we have
(4) 1−G (z) = P (Z1 > z) = r (z) e−Rz, z > 0,where r (z) =
l (ez) is a regularly varying function at infinity and R = 1/γ is
calledexponential tail coefficient. Equivalently we have
G−1 (1− s) = − 1R
log s+ log L̃ (s) , 0 < s < 1,
where L̃ (s) = L (1/s) is a slowly varying function at 0.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX 4
We focus on the problem of estimating the tail index using a
geometric-type estimatorof the exponential tail coefficient R,
proposed by Brito and Freitas (2003), given by
(5) R̂ (k) =
√√√√√√
∑ki=1 log
2(n/i)− 1k(∑k
i=1 log(n/i))2
∑ki=1 Z
2(n−i+1,n) −
1k
(∑ki=1 Z(n−i+1,n)
)2 .
This estimator arises from the study of two estimators based on
the least squares methodintroduced by Schultze and Steinebach
(1996). One of these estimators was also intro-duced by Kratz and
Resnick (1996) in an independent but equivalent way. In
general,when compared with other tail index estimators, it is
reported that the estimators pro-posed by Schultze and Steinebach
have a very good behaviour, with a better performancein several
situations (see Csörgő and Viharos (1998)). Namely one of the
interestingcharacteristics of the least squares estimators is the
smoothness of the realizations asa function of k. It should be
noted that the high variability that some tail estimatorspresent
makes more difficult the proper selection of the number of upper
o.s. involvedin the estimation. In this sense, the stability
presented in almost all examples can beconsidered a prominent
advantage of the least squares estimators over the classical
Hillestimator, whose plots often exhibit strong trends and a
considerable lack of smoothnessresulting in different estimates for
neighbouring values of k and an extreme sensitivity tothe choice of
the ideal k-value (see, e.g., Csörgő and Viharos (1998)). On the
other hand,it can be shown that the asymptotic variance of the
geometric-type estimator is twice theasymptotic variance of the
Hill estimator. However, given the sensitivity to the choice of
kpresented by the Hill estimator, the asymptotic variance should
not be the only criterionto be considered.
The estimators provided by Schultze and Steinebach were
motivated by the fact that− log(1−G(z)), from (4), is approximately
linear with slope R, for large z, since z−1 log r(z)→0 as z →∞. It
is then expected that − log(1−Gn(z)) is also approximately linear
for highvalues of n and z, where Gn denotes the empirical d.f.
associated to the random sampleZ1, . . . , Zn. It was also assumed
that r(z) ≡ c, ∀z > 0, and thus
y := − log(1−G(z)) = Rz − log c = Rz − d,
or equivalently,
z = R−1(y + d) = ay + b,
where a = R−1, b = R−1d and d = log c.Denoting by zi :=
z(n−i+1,n), i = 1, . . . , k ≤ n, the k upper o.s. of the sample
Z1, . . . , Zn,
Schultze and Steinebach approximate − log(1−G(zi)) by yi := −
log(1−Gn(z−i )) = − log(1−(n− i)/n) = log(n/i), obtaining that yi
is “close” to Rzi − d, or equivalently, zi is “close”to ayi + b.
Following this approach, one of the estimators was obtained by
minimising
the function f1(a, b) =∑ki=1(zi − ayi − b)2 and the other one by
minimising the function
f2(R, d) =∑ki=1(yi −Rzi + d)2. These choices correspond to
determine the inverse of the
slope of the line by minimising the sum of the distances between
the points {(zi, yi), i =1, . . . , k} and the line, measured
horizontally or vertically, respectively.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX 5
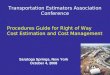
The R̂ estimator is obtained through a geometrical adaptation of
these two perspectives,minimising the sum of the areas of the
rectangles whose sides are the horizontal andvertical segments
between the points {(zi, yi), i = 1, . . . , k} and the line, in
Figure 1, whichis equivalent to minimise the function f(R, d) =
∑ki=1(yi−Rzi+d)(R−1yi+R−1d− zi). In
this way, a function of both the horizontal and the vertical
distance between the points{(zi, yi), i = 1, . . . , k} and the
line is minimised.
estacionárias, com uma estrutura de dependência semelhante à
considerada por Hsing, efaremos uma aplicação ao caso de
sucessões estacionárias m-dependentes.
Na secção 1.2, introduziremos o já referido estimador de tipo
geométrico, �R(kn), parao coeficiente de cauda exponencial,
relacionado com os estimadores �R1(kn) e �R3(kn) deSchultze e
Steinebach, e provaremos um resultado acerca da sua consistência.
Na secção1.3 mostraremos que, para sucessões kn que verifiquem
(1.1.5) e tais que kn/ log
4 n → ∞quando n → ∞, �R(kn) é assimptoticamente normal sobre
toda a classe de funções dedistribuição que satisfazem (1.1.1),
quando centrado numa certa sucessão determińısticaque converge
para R. Na secção 1.4 estabeleceremos um resultado acerca da
normalidadeassimptótica de �R(kn), quando centrado em R. Na
secção 1.5 iremos considerar o proced-imento bootstrap de cauda
introduzido por Bacro e Brito (1998) e mostrar que é
posśıvel,usando esse método, construir intervalos de confiança
para R, com base no estimador�R(kn). Por fim, na secção 1.6
estudaremos a consistência do novo estimador no caso dev.a.
dependentes, seguindo o estudo de Hsing (1991) para o estimador de
Hill.
1.2 Um estimador geométrico para coeficiente de cauda
exponencial, �RNo seguimento do estudo dos estimadores �R1(kn) e
�R3(kn) correspondentes às Figuras 1 e2, consideramos os dois
pontos de vista simultaneamente, minimizando a soma das áreasdos
rectângulos indicados na figura seguinte.
z
(z , y )
(ay + b , Rz - d)
y
i
i
i i i
i
y
z
Figura 3.
Assim, um novo estimador para R de tipo geométrico, �R(kn),
resulta da minimizaçãoda função
f(R, d) =kn�
i=1
(yi − Rzi + d)(R−1yi + R−1d − zi).
O estimador deduzido é o seguinte:
15
Figure 1. Geometric representation of the rectangles whose areas
will be minimised to obtain theestimator of R.
The asymptotic properties of R̂ were investigated in Brito and
Freitas (2003). In par-ticular, these authors established the
consistency of the estimator and proved that, under
general regularity conditions, the distribution of k1/2(R̂
(k)−R
)is asymptotically nor-
mal. This estimator also enjoys certain properties that make its
use specially attractivefor the case where R is expected to be
small (see, e.g., Csörgő and Viharos (1998) andBrito and Freitas
(2006)).
In the context of estimating the tail index γ, we will consider
the following geometric-type estimator:
(6) ĜT (k) =1
R̂ (k)=
√√√√√M(2)n −
[M
(1)n
]2
in(k).
where
(7) in(k) =1
k
k∑
i=1
log2(n/i)−
1k
k∑
i=1
log(n/i)
2
and
(8) M(j)n (k) =
1
k
k∑
i=1
(logX(n−i+1,n) − logX(n−k,n)
)j.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX 6
The asymptotic properties of ĜT arise naturally, through the
delta method (see, e.g.,Dudewicz and Mishra (1988), Theorem
6.3.18), from the corresponding properties of R̂studied in Brito
and Freitas (2003).
Here we assume there exists a positive function a such that, for
all x > 0,
(9) limt→∞
U (tx)− U (t)a (t)
=xγ − 1γ
.
From (2), we can choose a (t) = γU (t).The procedures analysed
in this work are formulated under second order conditions.
We suppose that there exists a function A (t), tending to zero
as t→∞, such that
(10) limt→∞
U(tx)U(t)
− xγ
A (t)= xγ
xρ − 1ρ
,
for all x > 0, where ρ < 0 is the shape parameter
governing the rate of convergence ofU (tx) /U (t) and the function
|A (t) | ∈ RVρ (see, e.g., Geluk and de Haan (1987)). A
veryimportant family satisfying (10) is the Hall’s class (Hall
(1982)), defined by:
(11) U (t) = Ctγ(
1 +A (t)
ρ(1 + o (1))
), as t→∞,
where
A (t) = γβtρ,
with γ > 0 and C > 0, and ρ < 0 and β 6= 0 are,
respectively, the shape and scaleparameters.
In order to obtain information about the upper tail of F , most
of the estimators areconstructed as functions of the upper k o.s.
of a sample of size n (see, e.g., Pickands(1975), Dekkers et al.
(1989)). When the number of upper o.s. used in the estimation of
γincreases, the bias in the estimation becomes larger. Bias
reduction is a complex problemand received considerable attention
in extreme value statistics (see, e.g., Beirlant et al.(2008) and
references therein). One of the procedures commonly used to deal
with thisproblem was formulated under second order properties of
the d.f. and gave rise to thesecond order reduced-bias
estimators.
In Section 2 we study some properties of the geometric-type
estimator and, in Sec-tion 3, we introduce two asymptotically
equivalent bias-corrected estimators and studytheir asymptotic
behaviour. We use the presented estimators to obtain asymptotic
con-fidence intervals. A simulation study is provided in Section 4,
in order to illustrate andcompare the finite sample behaviour of
the presented tail index estimators, including thegeometric-type
and Hill bias-corrected estimators. The simulations were performed
usingthe statistical programming language R (R Core Team (2015)).
Proofs are presented inSection 5. Some conclusions are given in
Section 6. The scripts used to perform thesimulations are provided
in the Appendix.
2. Asymptotic properties of the geometric-type estimator
In this section, we derive the asymptotic distributional
representation of the geometric-type estimator.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX 7
We begin by considering the asymptotic normality of the
following tail index estimatorof γ
γ̃ (k) =
√M
(2)n −
[M
(1)n
]2.
In the sequel,D−→ and D= stand, respectively, for convergence
and equality in distribution.
Theorem 2.1. Assume (10) holds. For sequences k such that (3)
holds, we have thefollowing asymptotic distributional
representation
γ̃ (k)D= γ +
γ
2√kQn −
γ√kPn +
A(nk
)
(1− ρ)2+ op
(A(nk
))+Op
(1
k
),
where Pn =√k(∑k
i=1 Zi/k − 1)
and Qn =√k(∑k
i=1 Z2i /k − 2
), (Pn, Qn) is asymptoti-
cally normal with mean equal to(
00
)and covariance matrix
(1 44 20
), and {Zi} denote i.i.d.
standard exponential r.v..
Corollary 2.2. Assume the conditions of Theorem 2.1 hold. If k
is such that√kA(n/k)→
λ finite, then√k (γ̃ (k)− γ) D−−−−→
n→∞ N(
λ
(1− ρ)2 , 2γ2).
In the following theorem, we present the asymptotic
distributional representation ofthe geometric-type estimator
Theorem 2.3. Assume (10) holds. For sequences k such that (3)
holds, we have thefollowing asymptotic distributional
representation
ĜT (k)D= γ +
γ
2√kQn −
γ√kPn +
A(nk
)
(1− ρ)2+ op
(A(nk
))+Op
(log2 k
k
),
where Pn =√k(∑k
i=1 Zi/k − 1)
and Qn =√k(∑k
i=1 Z2i /k − 2
), (Pn, Qn) is asymptoti-
cally normal with mean equal to(
00
)and covariance matrix
(1 44 20
), and {Zi} denote i.i.d.
standard exponential r.v..
Corollary 2.4. Assume the conditions of Theorem 2.3 hold. If k
is such that√kA(n/k)→
λ finite, then√k(ĜT (k)− γ
)D−−−−→
n→∞ N(
λ
(1− ρ)2 , 2γ2).
3. Bias-corrected geometric-type estimation
In this section we improve the geometric-type estimator in the
sense of reducing itsbias. For this we propose two asymptotic
equivalent bias-corrected estimators for the tailindex, and study
the corresponding asymptotic behaviour.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX 8
3.1. Bias-corrected geometric-type estimators.
Bias-corrected estimators may be constructed in a natural way
(see, e.g., Caeiro etal. (2005)) from the asymptotic representation
of the geometric-type estimator given inTheorem 2.3,
ĜT (k)D= γ +
γ
2√kQn −
γ√kPn +
A(nk
)
(1− ρ)2+ op
(A(nk
))+Op
(log2 k
k
)
The bias dominant component can be written as
A(nk
)
(1− ρ)2=γβ(nk
)ρ
(1− ρ)2.
and thus, removing this component, we obtain a bias-corrected
estimator of ĜT given by
(12) ĜT (k) = ĜT (k)
1−
β(nk
)ρ
(1− ρ)2
.
Considering now the exponential expansion e−x = 1 − x + o (x) as
x → 0, we may getthe asymptotically equivalent bias-corrected
estimator
(13) ĜT (k) = ĜT (k) exp
{− β
(1− ρ)2(nk
)ρ}.
We can easily note that the bias dominant component is dependent
of the shape ρ andscale β second order parameters. Thus, it is
important to consider an adequate estimationof the second order
parameters, ρ and β, in order to remove the bias dominant
componentand obtain bias-corrected estimators.
We remark that the geometric-type estimator has a lower bias
dominant componentthan the Hill estimator when evaluated at the
same threshold, i.e. for the same k.
Estimation of the second order parameters.
Here, we consider the class of estimators of the parameter ρ
(depending on a parameterτ whose role is explained below) proposed
by Fraga Alves et al. (2003)
(14) ρ̂(τ)n (k) = −
∣∣∣∣∣∣∣∣
3
(T
(τ)n (k)− 1
)
T(τ)n (k)− 3
∣∣∣∣∣∣∣∣,
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX 9
where
T(τ)n (k) =
(M
(1)n (k)
)τ−(M
(2)n (k)/2
)τ/2
(M
(2)n (k)/2
)τ/2−(M
(3)n (k)/6
)τ/3 , if τ > 0
log(M
(1)n (k)
)−12 log
(M
(2)n (k)/2
)
12 log
(M
(2)n (k)/2
)−13 log
(M
(3)n (k)/6
) , if τ = 0,
with Mjn as in (8), and the β estimator obtained in Gomes and
Martins (2002)
(15) β̂ρ̂ (k) =
(k
n
)ρ̂
(1k
k∑i=1
(ik
)−ρ̂)
1k
k∑i=1
Ui − 1kk∑i=1
(ik
)−ρ̂Ui
(1k
k∑i=1
(ik
)−ρ̂)
1k
k∑i=1
(ik
)−ρ̂Ui − 1k
k∑i=1
(ik
)−2ρ̂Ui
,
where
Ui = i
(log
X(n−i+1,n)X(n−i,n)
),
with 1 ≤ i ≤ k < n.We remark that the class of estimators of
ρ presented above, and consequently also the
β estimator, is dependent on a tuning parameter τ ≥ 0. In the
literature (see, e.g., FragaAlves et al. (2003)) it has been
suggested the use of the tuning parameter τ = 0 whenρ ∈ [−1, 0) and
τ = 1 when ρ ∈ (−∞,−1). This parameter must be chosen
appropriatelyin order to provide a higher stability for the
estimator of ρ and as such, a graphical studysupporting this choice
must always be seen as a relevant tool.
Choice of the kh level to be used in the second order parameters
estimation.
It is important to ensure that the bias reduction is achieved
without increasing theasymptotic variance. For that purpose, the
external estimation of ρ and β should be doneat a high level k
(larger than the one used for γ-estimation), denoted here by kh
(see, e.g.,Caeiro et al. (2005) and Gomes et al. (2004)). In fact,
the simulation studies presentedin the next section show that the
estimator of ρ only stabilizes at high levels of k.
As observed in other studies (see, e.g., Gomes et al. (2007))
the level that seems appro-priate to be used in applications is
(16) kh =⌊n1−�
⌋, for some � > 0 small,
where bxc denotes the integer part of x.
3.2. Asymptotic properties of geometric-type bias-corrected
estimators.
We begin by assuming that only the tail index parameter γ is
unknown and that ĜT∗
is one of the estimators ĜT or ĜT .
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
10
Theorem 3.1. Assume (11) holds. For sequences k such that (3)
holds, we have thefollowing asymptotic distributional
representation
ĜT∗
(k)D= γ +
γ
2√kQn −
γ√kPn + op
(A(nk
))+Op
(log2 k
k
),
where Pn =√k(∑k
i=1 Zi/k − 1)
and Qn =√k(∑k
i=1 Z2i /k − 2
), (Pn, Qn) is asymptoti-
cally normal with mean equal to(
00
)and covariance matrix
(1 44 20
), and {Zi} denote i.i.d.
standard exponential r.v..
Remark 3.2. We note that, under (11), we may write the first
remainder term of theasymptotic distributional representation of
Theorem 2.3 explicitly, i.e.
ĜT (k)D= γ +
γ
2√kQn −
γ√kPn +
γβ
(1− ρ)(nk
)ρ(1 + op(1)) +Op
(log2 k
k
),
and, from Theorem 3.1, we may write
ĜT∗
(k)D= γ +
γ
2√kQn −
γ√kPn + op
((nk
)ρ)+Op
(log2k
k
).
Then, for sequences k such that kρ−1 log2 k = o(nρ), we have
ĜT (k)D= γ +
γ
2√kQn −
γ√kPn +
γβ
(1− ρ)(nk
)ρ(1 + op(1)),
and
ĜT∗
(k)D= γ +
γ
2√kQn −
γ√kPn + op
((nk
)ρ).
Analogously, we obtain that the distributional representation of
γ̃ of Theorem 2.1 isthe same of that of ĜT . These computations
allows us to conclude that, for the Hall’smodel, the bias-corrected
geometric-type estimators with adequate sequences k, present
anasymptotic distributional representation with a smaller remainder
term than the originalestimator.
Corollary 3.3. Assume the conditions of Theorem 3.1 hold. If we
choose k such that√kA(n/k)→ λ finite, then
√k(ĜT∗
(k)− γ)
D−−−−→n→∞ N
(0, 2γ2
).
Assuming now that ĜT∗∗
denotes the version of ĜT∗
where the parameters ρ and β areestimated externally, we have
the following result.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
11
Theorem 3.4. Under the conditions of Theorem 3.1 and assuming
consistent estimatorsfor ρ and β computed at a level that implies
ρ̂ − ρ = op(1/ log n), we have the followingasymptotic
distributional representation
ĜT∗∗
(k)D= γ +
γ
2√kQn −
γ√kPn + op
(A(nk
))+Op
(log2 k
k
),
where Pn =√k(∑k
i=1 Zi/k − 1)
and Qn =√k(∑k
i=1 Z2i /k − 2
), (Pn, Qn) is asymptoti-
cally normal with mean equal to(
00
)and covariance matrix
(1 44 20
), and {Zi} denote i.i.d.
standard exponential r.v..
Corollary 3.5. Assume the conditions of Theorem 3.4 hold. If we
choose k such that√kA(n/k)→ λ finite, then
√k(ĜT∗∗
(k)− γ)
D−−−−→n→∞ N
(0, 2γ2
).
4. Simulation results
In this section we present some simulations in order to examine
the finite sample be-haviour of the proposed tail index estimators.
We began by generating s = 2000 inde-pendent replicates of sample
size n = 1000 from the Generalised Pareto Distribution withd.f.
F (x) = 1− (1 + γx)−1/γ , x ≥ 0, γ = 1,
and from the Burr distribution with d.f.
F (x) = 1−(
1 + x−ρ/γ)1/ρ
, x ≥ 0, γ = 1 and ρ = −2.
Remark that β = 1 for both families, and for GPD ρ = −γ.The
results were compared using mean values of the estimates and
through relative
root mean square error (RRMSE), with the expression
̂RRMSE(θ̂)
=
√1s∑si=1
(θ̂i − θ
)2
θ,
where θ is the value we want to estimate.The main purpose of the
simulations performed in this section is to provide, for nice
cases, an illustration of the behaviour of the proposed
geometric-type bias-corrected tailindex estimators. We compare the
new estimators with the Hill ones since the Hill esti-mator is one
of the most used in applications.
We start by presenting the behaviour of the original
geometric-type and Hill estimators,which is illustrated in Figures
2 and 3.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
12
GT H
k
Mea
n es
timat
es
0 200 400 600 800
0.9
1.0
1.1
1.2
1.3
1.4
k
RRMSE
0 200 400 600 800
0.0
0.1
0.2
0.3
0.4
0.5
Figure 2. Mean estimates (left) and RRMSE (right) of ĜT and Ĥ,
for a sample size n = 1000 (and
2000 replicates), as a function of k, from a GPD given by F (x)
= 1− (1 + γx)−1/γ , x ≥ 0 with γ = 1.
GT H
k
Mea
n es
timat
es
0 200 400 600 800
0.9
1.0
1.1
1.2
1.3
1.4
k
RRMSE
0 200 400 600 800
0.0
0.1
0.2
0.3
0.4
0.5
Figure 3. Mean estimates (left) and RRMSE (right) of ĜT and Ĥ,
for a sample size n = 1000 (and
2000 replicates), as a function of k, from a Burr distribution
given by F (x) = 1 −(1 + x−ρ/γ
)1/ρ,
x ≥ 0, with γ = 1 and ρ = −2.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
13
To illustrate the behaviour of the corrected estimators, we
consider the suitable estima-tors of the parameter ρ proposed by
Fraga Alves et al. (2003), in (14), and the β estimatorobtained in
Gomes and Martins (2002), in (15). Firstly we need to choose the
tuning pa-rameter τ , in which we will support the estimation of
the second order parameters ρ andβ. The use of τ = 0 when ρ ∈ [−1,
0) and τ = 1 when ρ ∈ (−∞,−1) is recommended forsome other
estimators (see, e.g., Fraga Alves et al. (2003)). This leads to
the choice ofτ = 0 for the GPD (ρ = −1) and τ = 1 for Burr
distribution (ρ = −2). For our estimator,the behaviour of ρ̂τ for
the values of the control parameter τ ∈ {0, 0.5, 1} for both
distri-butions is shown in Figure 4. This figure confirms the
prevalent choice of τ = 0 for GPDbut suggests that the choice of τ
= 0.5 instead of τ = 1 seems to be more suitable for
Burrdistribution, leading to better estimates of β and ρ.
ρ0 ρ0.5 ρ1
k
Mea
n es
timat
es
0 200 400 600 800 1000
-4.0
-3.5
-3.0
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
k
Mea
n es
timat
es
0 200 400 600 800 1000
-4.0
-3.5
-3.0
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
Figure 4. Mean estimates of ρ̂τ , τ = {0, 0.5, 1}, for GPD
(left) and Burr (right) distributions.GPD given by F (x) = 1 − (1 +
γx)−1/γ , x ≥ 0 (ρ = −1), and Burr distribution given by F (x)
=1−
(1 + x−ρ/γ
)1/ρ, x ≥ 0 and ρ = −2, both with γ = 1 (β = 1).
We also remark that the estimator of ρ presents a high variation
for most k values,stabilizing only at very high levels of k, for
which the estimates get closer to the true valueof the parameter.
This fact confirms that the estimation of ρ at a high level is
favourableand highly recommended. For exploring the results we
consider in (16) � = 0.005 and� = 0.001, i.e. we use the following
kh levels:
(17) kh1 =⌊n0.995
⌋and kh2 =
⌊n0.999
⌋.
To give an idea about the behaviour of β̂ according to the
choice of τ and the level kh, wepresent in Figure 5 the estimates
of β computed with ρ̂τ (kh1) and ρ̂τ (kh2), τ ∈ {0, 0.5, 1},for
both distributions. This figure indicates that the estimates of β
present a better
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
14
behaviour for larger values of k. The adequate estimation of the
second order parametersis crucial in order to get better estimates
of the tail index using corrected estimators.Following what seems
to be more appropriate graphically, we chose to estimate ρ and
βusing τ = 0 for GPD and τ = 0.5 for Burr distribution, both
computed at the same levelkh1 or kh2.
βρ0(kh1) βρ0.5(kh1) βρ1(kh1) βρ0(kh2) βρ0.5(kh2) βρ1(kh2)
k
Mea
n es
timat
es
0 200 400 600 800 1000
0.0
0.5
1.0
1.5
2.0
k
Mea
n es
timat
es
0 200 400 600 800 1000
0.0
0.5
1.0
1.5
2.0
Figure 5. Mean estimates of β̂ρ̂τ (kh1) and β̂ρ̂τ (kh2), τ = {0,
0.5, 1}, for GPD (left) and Burr (right)distributions. GPD given by
F (x) = 1 − (1 + γx)−1/γ , x ≥ 0 (ρ = −1), and Burr distribution
givenby F (x) = 1−
(1 + x−ρ/γ
)1/ρ, x ≥ 0 and ρ = −2, both with γ = 1 (β = 1).
From Figures 6 and 7, in which the behaviour of the
geometric-type estimator is pre-sented as well as its new corrected
versions, we observe that using both GPD and Burrdistribution, the
performance of the geometric-type estimator was improved by bias
cor-rection and the resulting geometric-type bias-corrected
estimators show a very good be-haviour. We also note that, for
sample size n = 1000, the performance of the correctedestimators
are slightly better when we calculate the second order parameters
using thelevel kh2 instead of using the kh1 level.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
15
GT GT(ρ(kh1), β(kh1)) GT(ρ(kh1), β(kh1)) GT(ρ(kh2), β(kh2))
GT(ρ(kh2), β(kh2))
k
Mea
n es
timat
es
0 200 400 600 800
0.9
1.0
1.1
1.2
1.3
1.4
k
RRMSE
0 200 400 600 800
0.0
0.1
0.2
0.3
0.4
0.5
Figure 6. Mean estimates (left) and RRMSE (right) of ĜT , ĜT
and ĜT , with ρ̂ and β̂ computedat the levels kh1 =
⌊n0.995
⌋and kh2 =
⌊n0.999
⌋, for a sample size n = 1000 (and 2000 replicates), as
a function of k, from a GPD given by F (x) = 1 − (1 + γx)−1/γ ,
x ≥ 0 with γ = 1 (ρ = −1, β = 1;τ = 0).
GT GT(ρ(kh1), β(kh1)) GT(ρ(kh1), β(kh1)) GT(ρ(kh2), β(kh2))
GT(ρ(kh2), β(kh2))
k
Mea
n es
timat
es
0 200 400 600 800
0.9
1.0
1.1
1.2
1.3
1.4
k
RRMSE
0 200 400 600 800
0.0
0.1
0.2
0.3
0.4
0.5
Figure 7. Mean estimates (left) and RRMSE (right) of ĜT , ĜT
and ĜT , with ρ̂ and β̂ computedat the levels kh1 =
⌊n0.995
⌋and kh2 =
⌊n0.999
⌋, for a sample size n = 1000 (and 2000 replicates), as a
function of k, from a Burr distribution given by F (x) = 1−(1 +
x−ρ/γ
)1/ρ, x ≥ 0, with γ = 1, ρ = −2
(β = 1; τ = 0.5).
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
16
Using the asymptotic normality of the geometric-type estimator,
we may constructasymptotic confidence intervals for the tail index,
with (1− α)-level, in the usual way:
IĜT
(k, α) =
{γ :
1√2γ
k1/2|ĜT − γ| ≤ Φ−1(
1− α2
)}.
The confidence bounds for the corresponding geometric-type
bias-corrected estimators aresimilar to the previous ones. The 95%
confidence bounds for the geometric-type estimatorand for the
corresponding bias-corrected estimators are reported in Tables 1
and 2. Foreach distribution, we present three values of k for the
illustration of the influence of thechoice of k.
Table 1. Confidence bounds (α = 0.05) using the geometric-type
estimator and the correspondingbias-corrected estimators, with ρ̂
and β̂ computed at the levels kh1 =
⌊n0.995
⌋and kh2 =
⌊n0.999
⌋, for
a sample size n = 1000 (and 2000 replicates), as a function of
k. GPD F (x) = 1− (1 + γx)−1/γ , x ≥ 0with γ = 1 (ρ = −1, β = 1; τ
= 0).
k ĜT ĜT ρ̂(kh1),β̂(kh1) ĜT ρ̂(kh2),β̂(kh2) ĜT
ρ̂(kh1),β̂(kh1) ĜT ρ̂(kh2),β̂(kh2)
300 1.125 ± 0.180 1.013 ± 0.162 1.002 ± 0.160 1.018 ± 0.163
1.008 ± 0.161500 1.198 ± 0.149 1.011 ± 0.125 0.997 ± 0.124 1.025 ±
0.127 1.013 ± 0.126700 1.310 ± 0.137 1.037 ± 0.109 1.020 ± 0.107
1.063 ± 0.111 1.050 ± 0.110
Table 2. Confidence bounds (α = 0.05) using the geometric-type
estimator and the correspondingbias-corrected estimators, with ρ̂
and β̂ computed at the levels kh1 =
⌊n0.995
⌋and kh2 =
⌊n0.999
⌋,
for a sample size n = 1000 (and 2000 replicates), as a function
of k. Burr distribution F (x) =
1−(1 + x−ρ/γ
)1/ρ, x ≥ 0, with γ = 1 and ρ = −2 (β = 1; τ = 0.5).
k ĜT ĜT ρ̂(kh1),β̂(kh1) ĜT ρ̂(kh2),β̂(kh2) ĜT
ρ̂(kh1),β̂(kh1) ĜT ρ̂(kh2),β̂(kh2)
300 1.044 ± 0.167 1.026 ± 0.164 1.022 ± 0.164 1.026 ± 0.164
1.022 ± 0.164500 1.055 ± 0.131 1.012 ± 0.125 1.005 ± 0.125 1.013 ±
0.126 1.006 ± 0.125700 1.089 ± 0.114 1.011 ± 0.106 1.000 ± 0.105
1.014 ± 0.106 1.004 ± 0.105
We may note that when using corrected estimators, the amplitude
of the asymptoticconfidence intervals is smaller than when using
the original one.
In order to have an idea of the good behaviour of the
geometric-type bias-corrected esti-mators, we compared them with
the corresponding Hill bias-corrected estimators (Caeiroet al.
(2005)), given by
Ĥ (k) = Ĥ (k)
1−
β̂(nk
)ρ̂
1− ρ̂
and
Ĥ (k) = Ĥ (k) exp
{− β̂
1− ρ̂(nk
)ρ̂},
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
17
where ρ̂ and β̂ are the estimators of the shape and scale
parameters, respectively.We present here the results for sample
sizes n = 300 and n = 1000 with a number of
replications s = 2000. For larger number of replications, the
simulation results were verysimilar and so they are not reported
here.
From Figures 8, 9, 10 and 11 we observe that, for the considered
GPD and Burrdistribution, both the geometric-type and the Hill
bias-corrected estimators present a goodperformance. Particularly,
we note that, in general, the geometric-type estimator has abetter
performance for intermediate k values, while the best behaviour of
the Hill estimatoris observed for small values of k. Estimates
given by the geometric-type estimator arequite far from the target
value for small values of k, while, for the Hill estimator, the
sameis observed for large k values. Moreover, both Hill corrected
estimators present a betterperformance when the second order
parameters are based on level kh1. For the geometric-type
estimators, the results are slightly better for the level kh2, with
the exception of theBurr distribution with n = 300.
We may also note that, in general, the corrected geometric-type
estimators present,as a function of k, a smoother behaviour than
the Hill estimators. In particular, thegeometric estimators are
more stable and less sensitive to the choice of the number
oflargest observations taken into account for the estimation than
the Hill ones.
GT(ρ(kh1), β(kh1))GT(ρ(kh1), β(kh1))
GT(ρ(kh2), β(kh2))GT(ρ(kh2), β(kh2))
H(ρ(kh1), β(kh1))H(ρ(kh1), β(kh1))
H(ρ(kh2), β(kh2))H(ρ(kh2), β(kh2))
k
Mea
n es
timat
es
0 60 120 180 240 300
0.9
1.0
1.1
1.2
1.3
1.4
k
RRMSE
k
RRMSE
0 60 120 180 240 300
0.0
0.1
0.2
0.3
0.4
0.5
Figure 8. Mean estimates (left) and RRMSE (right) of ĜT , ĜT ,
Ĥ and Ĥ, with ρ̂ and β̂ computedat the levels kh1 =
⌊n0.995
⌋and kh2 =
⌊n0.999
⌋, for a sample size n = 300 (and 2000 replicates), as
a function of k, from a GPD given by F (x) = 1 − (1 + γx)−1/γ ,
x ≥ 0 with γ = 1 (ρ = −1, β = 1;τ = 0).
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
18
GT(ρ(kh1), β(kh1))GT(ρ(kh1), β(kh1))
GT(ρ(kh2), β(kh2))GT(ρ(kh2), β(kh2))
H(ρ(kh1), β(kh1))H(ρ(kh1), β(kh1))
H(ρ(kh2), β(kh2))H(ρ(kh2), β(kh2))
k
Mea
n es
timat
es
0 200 400 600 800
0.9
1.0
1.1
1.2
1.3
1.4
k
RRMSE
k
RRMSE
0 200 400 600 800
0.0
0.1
0.2
0.3
0.4
0.5
Figure 9. Mean estimates (left) and RRMSE (right) of ĜT , ĜT ,
Ĥ and Ĥ, with ρ̂ and β̂ computedat the levels kh1 =
⌊n0.995
⌋and kh2 =
⌊n0.999
⌋, for a sample size n = 1000 (and 2000 replicates), as
a function of k, from a GPD given by F (x) = 1 − (1 + γx)−1/γ ,
x ≥ 0 with γ = 1 (ρ = −1, β = 1;τ = 0).
GT(ρ(kh1), β(kh1))GT(ρ(kh1), β(kh1))
GT(ρ(kh2), β(kh2))GT(ρ(kh2), β(kh2))
H(ρ(kh1), β(kh1))H(ρ(kh1), β(kh1))
H(ρ(kh2), β(kh2))H(ρ(kh2), β(kh2))
k
Mea
n es
timat
es
0 60 120 180 240 300
0.9
1.0
1.1
1.2
1.3
1.4
k
RRMSE
k
RRMSE
0 60 120 180 240 300
0.0
0.1
0.2
0.3
0.4
0.5
Figure 10. Mean estimates (left) and RRMSE (right) of ĜT , ĜT
, Ĥ and Ĥ, with ρ̂ and β̂ computedat the levels kh1 =
⌊n0.995
⌋and kh2 =
⌊n0.999
⌋, for a sample size n = 300 (and 2000 replicates), as a
function of k, from a Burr distribution given by F (x) = 1 −(1 +
x−ρ/γ
)1/ρ, x ≥ 0, with γ = 1 and
ρ = −2 (β = 1; τ = 0.5).
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
19
GT(ρ(kh1), β(kh1))GT(ρ(kh1), β(kh1))
GT(ρ(kh2), β(kh2))GT(ρ(kh2), β(kh2))
H(ρ(kh1), β(kh1))H(ρ(kh1), β(kh1))
H(ρ(kh2), β(kh2))H(ρ(kh2), β(kh2))
k
Mea
n es
timat
es
0 200 400 600 800
0.9
1.0
1.1
1.2
1.3
1.4
k
RRMSE
k
RRMSE
0 200 400 600 800
0.0
0.1
0.2
0.3
0.4
0.5
Figure 11. Mean estimates (left) and RRMSE (right) of ĜT , ĜT
, Ĥ and Ĥ, with ρ̂ and β̂ computedat the levels kh1 =
⌊n0.995
⌋and kh2 =
⌊n0.999
⌋, for a sample size n = 1000 (and 2000 replicates), as a
function of k, from a Burr distribution given by F (x) = 1 −(1 +
x−ρ/γ
)1/ρ, x ≥ 0, with γ = 1 and
ρ = −2 (β = 1; τ = 0.5).
As expected, all the estimators present a better behaviour for
the largest sample sizen = 1000.
Overall, we may conclude that the performance of the
geometric-type estimator isimproved by bias correction and the
corresponding corrected versions present a very goodbehaviour.
5. Proofs
For the proof of Theorem 2.1 we need the following lemma.
Lemma 5.1 (Dekkers and de Haan (1993), Lemma 3.1). Let Y(1,n) ≤
Y(2,n) ≤ · · · ≤ Y(n,n)denote the o.s. based on the n first
observations of the sequence Y1, . . . , Yn of i.i.d. r.v.with
common d.f. 1− 1/x (x > 1). Let k be such that (3) holds. For γ
> 0, define
Tn =√k
1
k
k∑
i=1
log Y(n−i+1,n) − log Y(n−k,n) − 1
,
Vn =√k
1
k
k∑
i=1
(log Y(n−i+1,n) − log Y(n−k,n)
)2− 2
.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
20
Then (Tn, Vn) is asymptotically normal with mean equal to(
00
)and covariance matrix(
1 44 20
).
Proof of Theorem 2.1. Note that the condition (10) is equivalent
to
limt→∞
logU (tx)− logU (t)− γ log xA (t)
=xρ − 1ρ
.
Consequently, we have that
logU (tx)− logU (t) = γ log x+A (t) xρ − 1ρ
(1 + o (1)) ,
and so
(logU (tx)− logU (t))2 = (γ log x)2 + 2γ xρ − 1ρ
(log x)A (t) + o (A (t)) ,
as t→∞.Let us consider the variables presented in Lemma 5.1.
Using the probability integral
transform, we have (X1, X2, · · · , Xn)D= (U (Y1) , U (Y2) , · ·
· , U (Yn)), n ≥ 1, and so, we can
write, without loss of generality,(X(i,n)
)=(U(Y(i,n)
)).
Then,
M(1)n =
1
k
k∑
i=1
logX(n−i+1,n) − logX(n−k,n)
=1
k
k∑
i=1
logU
(Y(n−i+1,n)Y(n−k,n)
Y(n−k,n)
)− logU
(Y(n−k,n)
)
= γ +γ√kTn +
A(Y(n−k,n)
)
1− ρ + op(A(Y(n−k,n)
)),
since
1
k
k∑
i=1
(Y(n−i+1,n)Y(n−k,n)
)ρ− 1
ρ
D=
1
k
k∑
i=1
(Yρi − 1ρ
),
which tends to E
(Yρ1 −1ρ
)= 11−ρ .
We have also
M(2)n =
1
k
k∑
i=1
[logX(n−i+1,n) − logX(n−k,n)
]2
= 2γ2 +γ2√kVn +A
(Y(n−k,n)
) 2γ (2− ρ)(1− ρ)2
+ op
(A(Y(n−k,n)
)),
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
21
since
1
k
k∑
i=1
(Y(n−i+1,n)Y(n−k,n)
)ρ− 1
ρlog
Y(n−i+1,n)Y(n−k,n)
D=
1
k
k∑
i=1
(Yρi − 1ρ
log Yi
),
which tends to E
(Yρ1 −1ρ log Y1
)= 2−ρ
(1−ρ)2 .
Considering h(x) = x2 and the Taylor expansion of h
(M
(1)n
)around γ, we obtain
[M
(1)n
]2= γ2 +
2γ2√kTn +
2γ
1− ρA(Y(n−k,n)
)+ op
(A(Y(n−k,n)
))+Op
(1
k
).
Using the above representations we obtain that
γ̃2 (k) = M(2)n −
[M
(1)n
]2
= γ2 +γ2√k
(Vn − 2Tn) + d A(Y(n−k,n)
)+ op
(A(Y(n−k,n)
))+Op
(1
k
),
where d = 2γ/ (1− ρ)2.Since A (t) ∈ RVρ, then A (tx) = xρA (t)
(1 + o (1)). Noting now that (k/n)Y(n−k,n) =
1 + op (1), we have
A(Y(n−k,n)
)= A
(nk
(1 + op (1)
))
= A(nk
)+ op
(A(nk
)).
Therefore, we may write
γ̃2 (k) = γ2 +γ2√k
(Vn − 2Tn) + d A(nk
)+ op
(A(nk
))+Op
(1
k
).
Considering g(x) =√x and the Taylor expansion of g
(γ̃2 (k)
)around γ2, we obtain
(18)
γ̃ (k) = γ +1
2γ
[γ2√k
(Vn − 2Tn) + d A(nk
)+ op
(A(nk
))+Op
(1
k
)]
= γ +γ
2√kVn −
γ√kTn +
A(nk
)
(1− ρ)2+ op
(A(nk
))+Op
(1
k
).
Now, we recall that log(Y(n−i+1,n)/Y(n−k,n)
)are exponential standard r.v., Exp (1). Us-
ing Lemma 5.1, from (18) we can write
γ̃ (k)D= γ +
γ
2√kQn −
γ√kPn +
A(nk
)
(1− ρ)2+ op
(A(nk
))+Op
(1
k
),
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
22
where Pn =√k(∑k
i=1 Zi/k − 1)
, Qn =√k(∑k
i=1 Z2i /k − 2
), with Zi i.i.d. exponential
standard r.v., are jointly asymptotically normal. This completes
the proof. �
Proof of Corollary 2.2. The result follows from the proof of
Theorem 2.1 noting that,
since (Pn, Qn)D−→ N
[(0
0
),
(1 4
4 20
)], then, in particular,
V(√
k (γ̃ (k)− γ))
= V(γ
2Qn
)+ V (γPn)− 2Cov
(γ2Qn, γPn
)−−−−→n→∞
2γ2.
�
For proving Theorem 2.3 we use the following auxiliary
lemma.
Lemma 5.2 (Brito and Freitas (2003), Lemma 2). Let k be a
sequence of positive integerssuch that 1 ≤ k ≤ n. For the sequence
in (k) defined in (7) we have
in (k) = 1 +O
(log2 k
k
).
Proof of Theorem 2.3. Recalling that
ĜT (k) =γ̃ (k)√in (k)
,
we can write
√k(ĜT (k)− γ
)=√k (γ̃ (k)− γ) +
√kγ̃ (k)
(1√in (k)
− 1).
As γ̃ (k)P−−−−→
n→∞γ, from Lemma 5.2 we get
√kγ̃ (k)
(1√in (k)
− 1)
= Op
(log2 k√
k
).
So, from the proof of Theorem 2.1 and Lemma 5.2, we have
ĜT (k) = γ +γ
2√kVn −
γ√kTn +
A(nk
)
(1− ρ)2+ op
(A(nk
))+Op
(log2 k
k
),
where Tn and Vn are the same as in proof of Theorem 2.1. �
Proof of Corollary 2.4. The result follows from the proof of
Theorem 2.3 noting that, as
(Pn, Qn)D−→ N
[(0
0
),
(1 4
4 20
)], then, in particular,
V(√
k(ĜT (k)− γ
))= V
(γ2Qn
)+ V (γPn)− 2Cov
(γ2Qn, γPn
)−−−−→n→∞
2γ2.
�
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
23
Proof of Theorem 3.1. Recall that ĜT (k)P−→ γ as n → ∞. If all
parameters are known,
except the tail index γ, we get
ĜT (k) = ĜT (k)
1−
β(nk
)ρ
(1− ρ)2
= ĜT (k)−A(nk
)
(1− ρ)2(1 + op (1)
)
= γ +γ
2√kVn −
γ√kTn + op
(A(nk
))+Op
(log2 k
k
).
With an easy calculation, we also have
ĜT (k) = ĜT (k) exp
−
β(nk
)ρ
(1− ρ)2
= ĜT (k)
1−
A(nk
)
γ (1− ρ)2+ op
A(nk
)
γ (1− ρ)2
= γ +γ
2√kVn −
γ√kTn + op
(A(nk
))+Op
(log2 k
k
).
�
Proof of Corollary 3.3. From the proof of Theorem 3.1 we
have
√k(ĜT∗
(k)− γ)
=γ
2Vn − γTn +
√kop
(A(nk
))+Op
(log2 k√
k
).
Since√kA(n/k)→ λ as n→∞, then
√k(ĜT∗
(k)− γ)
=γ
2Vn − γTn + op (1) .
It remains to compute the values of the asymptotic variance and
mean.
E[√
k(ĜT∗
(k)− γ)]
=γ
2E (Vn)− γE (Tn) −−−−→
n→∞0,
V[√
k(ĜT∗
(k)− γ)]
=γ2
4V (Vn) + γ
2V (Tn)− 2Cov(γ
2Vn, γTn
)−−−−→n→∞
2γ2.
�
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
24
Proof of Theorem 3.4. If ρ and β are estimated consistently, we
can use the Taylor’s ex-pansion for bivariate functions and get
β̂
(1− ρ̂)2(nk
)ρ̂=
β
(1− ρ)2(nk
)ρ+(β̂ − β
) 1(1− ρ)2
(nk
)ρ (1 + op (1)
)
+β
(1− ρ)2(ρ̂− ρ)
(nk
)ρ( 21− ρ + log
(nk
))(1 + op (1)
)
=A(n/k)
γ (1− ρ)2
(β̂
β+
2 (ρ̂− ρ)1− ρ + (ρ̂− ρ) log
(nk
))(1 + op (1)
),
where β̂ and ρ̂ are the estimators of β and ρ, respectively.
Therefore we have
ĜT (k)
1−
β̂(nk
)ρ̂
(1− ρ̂)2
= ĜT (k)−
A(nk
)
(1− ρ)2+ op
(A(nk
))
= γ +γ√k
(Vn2− Tn
)+ op
(A(nk
))+Op
(log2 k
k
)
and
ĜT (k) exp
−
β̂(nk
)ρ̂
(1− ρ̂)2
= γ + γ√
k
(Vn2− Tn
)+ op
(A(nk
))+Op
(log2 k
k
),
since ρ̂ and β̂ are consistent estimators of ρ and β computed at
a level such that ρ̂− ρ =op (1/ log n). �
Proof of Corollary 3.5. The result follows using the same
approach as in the proof ofCorollary 3.3. �
6. Conclusions
Most of the classic estimators of the tail Pareto-type index,
such as Hill-type estimators,show a moderate or severe bias,
presenting also in some cases an irregular behaviour,especially for
not large sample sizes. The geometric-type estimators of the tail
indexpresent, in general, a smooth behaviour, but may also suffer
from small sample bias.
In this paper we have introduced two bias-corrected estimators
of γ. These estimatorsare based on an asymptotic distributional
representation of the geometric-type estimator,derived under common
second order conditions. We also derived asymptotic
distributionalrepresentations of the new two bias-corrected
geometric-type estimators and establishedtheir asymptotic
normality. From these results we see that the asymptotic variance
is notincreased by the bias reduction.
The finite sample behaviour of the new bias-corrected estimators
was analised andcompared with other estimators through a small
scale simulation study, for the GPDand Burr distributions. Beside
the original geometric-type estimator, we considered
twobias-corrected Hill estimators. The reduced versions of both
estimators show a good
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
25
performance, but we may notice that, in general, the
bias-corrected geometric-type esti-mators present a smoother path
as a function of k, being less sensitive to the choice ofthe k
upper observations used in the estimation than the reduced-bias
Hill estimators,especially for small samples.
Overall, we may conclude that the empirical results show the
improvement obtainedwith the bias correction and the adequacy of
the new estimators for the considered dis-tributions. The better
performance of the bias-corrected comparatively to the
originalgeometric-type estimators is reflected in the obtained
confidence bounds, with smalleramplitudes and very similar bound
values for different choices of the number of o.s. k.
Finally, we note that the simulation study may be reproduced and
extended using theR-script in the Appendix.
Acknowledgements
ACMF was partially supported by FCT grant SFRH/BPD/66174/2009
and FCT projectFAPESP/19805/2014. LC was partially supported by FCT
grant SFRH/BD/60642/2009.All three authors were partially supported
by FCT project PTDC/MAT/120346/2010,which is funded by national and
European structural funds through the programs FEDERand COMPETE.
All authors were partially supported by CMUP
(UID/MAT/00144/2013),which is funded by FCT (Portugal) with
national (MEC) and European structural fundsthrough the programs
FEDER, under the partnership agreement PT2020.
The authors warmly thank the referees for their useful
suggestions, that greatly im-proved the presentation of the paper,
in particular the suggestions to include a conclusionssection and
an appendix with the used scripts.
References
Beirlant, J., Figueiredo, F., Gomes, M.I. and Vandewalle, B.
(2008). Improvedreduced-bias tail index and quantile estimators,
Journal of Statistical Planning and Infer-ence, 138, 1851–1870.
Brito, M., Cavalcante, L. and Freitas, A.C.M. (2015). Modelling
of extremal earthquakes.In “Mathematics of Energy and Climate
Change”, 39–60, Springer.
Brito, M. and Freitas, A.C.M. (2003). Limiting behaviour of a
geometric estimator for tailindices, Insurance: Mathematics and
Economics, 33, 221–226.
Brito, M. and Freitas, A.C.M. (2006). Weak convergence of a
bootstrap geometric-typeestimator with applications to risk theory,
Insurance: Mathematics and Economics, 38, 571–584.
Caeiro, F., Gomes, M.I. and Pestana, D. (2005). Direct reduction
of bias of the classicalHill estimator, Revstat, 3, 113–136.
Coles, S. G. (2001). An introduction to statistical modelling of
extreme values, Springer Seriesin Statistics, Springer, New
York.
Csörgő, S. and Viharos, L. (1998). Estimating the tail index.
In “Asymptotic Methods inProbability and Statistics”, 833–881,
North Holland, Amesterdam.
Deheuvels, P., Haeusler, E. and Mason, D.M. (1988). Almost sure
convergence of the Hillestimator, Mathematical Proceedings of the
Cambridge Philosophical Society, 104, 371–381.
Dekkers, A.L.M. and de Haan, L. (1993). Optimal choice of sample
fraction in extreme-valueestimation, Journal of Multivariate
Analysis, 47, 173–195.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
26
Dekkers, A.L.M., Einmahl, J.H.J. and de Haan, L. (1989). A
moment estimator for theindex of an extreme-value distribution,
Annals of Statistics, 17, 1833–1855.
Dudewicz, E.J. and Mishra, S.N. (1988). Modern Mathematical
Statistics, Wiley, New York.Faranda, D., Lucarini, V., Turchetti,
G. and Vaienti, S. (2012). Generalized extreme
value distribution parameters as dynamical indicators of
stability, International Journal ofBifurcation and Chaos, 22,
1250276.
Fraga Alves, M.I., Gomes, M.I. and de Haan, L. (2003). A new
class of semi-parametricestimators of the second order parameter,
Portugaliae Mathematica, 60, 193–213.
Geluk, J. and de Haan, L. (1987). Regular Variation, Extensions
and Tauberian Theorems,CWI Tract 40, Center of Mathematics and
Computer Science, Amsterdam, Netherlands.
Gomes, M. I., Caeiro, F. and Figueiredo, F. (2004). Bias
reduction of a tail index estimatortrough an external estimation of
the second order parameter, Statistics, 38, 497–510.
Gomes, M.I. and Martins, M.J. (2002). “Asymptotically unbiased”
estimators of the tailindex based on external estimation of the
second order parameter, Extremes, 5, 5–31.
Gomes, M.I, Martins, M.J. and Neves, M. (2007). Improving second
order reduced biasextreme value index estimation, Revstat 5,
177–207.
Haeusler, E. and Teugels, J.L. (1985). On asymptotic normality
of Hill’s estimator for theexponent of regular variation, Annals of
Statistics, 13, 743–756.
Hall, P. (1982). On some simple estimates of an exponent of
regular variation, Journal of theRoyal Statistical Society: Series
B, 44, 37–42.
Hill, B.M. (1975). A simple approach to inference about the tail
of a distribution, Annals ofStatistics, 3, 1163–1174.
Kratz, M. and Resnick, S.I. (1996). The qq-estimator and heavy
tails, Communications inStatistics. Stochastic Models, 12,
699–724.
Leadbetter, M. R., Lindgren, G. and Rootzén, H.(1983). Extremes
and related propertiesof random sequences and processes, Springer,
New York.
Lucarini, V., Faranda, D., Turchetti, G. and Vaienti, S. (2012).
Extreme value theoryfor singular measures, Chaos, 22, 023135.
Pickands, J. (1975). Statistical inference using extreme order
statistics, Annals of Statistics,3, 119–131.
R Core Team (2015). R: A language and environment for
statistical computing, Vienna, Aus-tria: R Foundation for
Statistical Computing.
Schultze, J. and Steinebach, J. (1996). On least squares
estimates of an exponential tailcoefficient, Statistics &
Decisions 14, 353–372.
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
27
Appendix
## Companion material to
## Bias-corrected geometric-type estimators of the tail index,
by
## M. Brito, L. Cavalcante and A.C.M. Freitas, 2015.
## Can be freely distributed according to GNU license.
###########################
## SIMULATION FUNCTION ##
###########################
## SIMULATION FUNCTION
Simulation = function (n, s, f)
{
# Load libraries
library(actuar) #to qburr function
library(VGAM) #to qgpd function
# Range of order statistics
k1=1 #minimum
k2=n-1 #maxima
# Size of vector to save results
d=k2-k1+1
# High level to compute second order parameters
k1difKh1=floor(n^(0.995))
k1difKh2=floor(n^(0.999))
# Vectors of uniform distributed random values
u=rep(1,n)
u=as.vector(u)
u1=rep(1,n)
u1=as.vector(u1)
# Sample vector
x=rep(1,n)
x=as.vector(x)
# Matrices to save the estimated values for each k and for s
replicates
Gsvezes=array(0, dim=c(s,d)) #Geometric estimator
GRVk1difKh1svezes=array(0, dim=c(s,d)) #Reduced Bias Geometric
estimator (kh1)
GRVEk1difKh1svezes=array(0, dim=c(s,d)) #Reduced Bias Geometric
Exponential estimator (kh1)
GRVk1difKh2svezes=array(0, dim=c(s,d)) #Reduced Bias Geometric
estimator (kh2)
GRVEk1difKh2svezes=array(0, dim=c(s,d)) #Reduced Bias Geometric
Exponential estimator (kh2)
Hsvezes=array(0, dim=c(s,d)) #to Hill estimator
HRVk1difKh1svezes=array(0, dim=c(s,d)) #Reduced Bias Hill
estimator (kh1)
HRVEk1difKh1svezes=array(0, dim=c(s,d)) #Reduced Bias Hill
Exponential estimator (kh1)
HRVk1difKh2svezes=array(0, dim=c(s,d)) #Reduced Bias Hill
estimator (kh2)
HRVEk1difKh2svezes=array(0, dim=c(s,d)) #Reduced Bias Hill
Exponential estimator (kh2)
# Process to compute estimated values for s replicated
samples
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
28
for (j in 1:s)
{
# Seed for random generation
if (f=="GPD") {
set.seed(2000+j) #GPD
} else if (f=="BURR") {
set.seed(8000+j) #Burr
}
# Generate uniform distributed random values
u[n]=(runif(1, min=0, max=1))^(1/n)
for (i in 2:n) {
u1[i]=runif(1, min=0, max=1)
u[n-i+1]=u[n-i+2]*(u1[i]^(1/(n-i+1)))}
# Generate the (Burr or GPD) sample from u
if (f=="GPD") {
#GPD parameters: Location=1, Scale=1 and Gamma=1
x=qgpd(u, 0, 1, 1)
} else if (f=="BURR") {
#Burr parameters: Gamma=1 and Rho=-2 --> a=-1/Rho=0.5,
b=-Rho/Gamma=2 and s=1
x=qburr(u, 0.5, 2, 0, 1)
}
# True value of the tail index (Gamma)
truevalue=1
# Compute the estimated values and save them in the matrix for
each replicate
#Geometric estimator
gamma.G095=Geometric(x, k=k1:k2)
Gsvezes[j,]=gamma.G095$estimate
#Hill estimator
gamma.H095=Hill1(x, k=k1:k2)
Hsvezes[j,]=gamma.H095$estimate
#Reduced Bias Geometric estimator (kh1)
gamma.GRV095k1difKh1=GeometricredviesK1dif(x, k=k1:k2, k1difKh1,
fun=f)
GRVk1difKh1svezes[j,]=gamma.GRV095k1difKh1$estimate
#Reduced Bias Exponential Geometric estimator (kh1)
gamma.GRVE095k1difKh1=GeometricredviesexpK1dif(x, k=k1:k2,
k1difKh1, fun=f)
GRVEk1difKh1svezes[j,]=gamma.GRVE095k1difKh1$estimate
#Reduced Bias Hill estimator (kh1)
gamma.HRV095k1difKh1=Hill1redviesK1dif(x, k=k1:k2, k1difKh1,
fun=f)
HRVk1difKh1svezes[j,]=gamma.HRV095k1difKh1$estimate
#Reduced Bias Exponential Hill estimator (kh1)
gamma.HRVE095k1difKh1=Hill1redviesexpK1dif(x, k=k1:k2, k1difKh1,
fun=f)
HRVEk1difKh1svezes[j,]=gamma.HRVE095k1difKh1$estimate
#Reduced Bias Geometric estimator (kh2)
gamma.GRV095k1difKh2=GeometricredviesK1dif(x, k=k1:k2, k1difKh2,
fun=f)
GRVk1difKh2svezes[j,]=gamma.GRV095k1difKh2$estimate
#Reduced Bias Exponential Geometric estimator (kh2)
gamma.GRVE095k1difKh2=GeometricredviesexpK1dif(x, k=k1:k2,
k1difKh2, fun=f)
GRVEk1difKh2svezes[j,]=gamma.GRVE095k1difKh2$estimate
#Reduced Bias Hill estimator (kh2)
gamma.HRV095k1difKh2=Hill1redviesK1dif(x, k=k1:k2, k1difKh2,
fun=f)
HRVk1difKh2svezes[j,]=gamma.HRV095k1difKh2$estimate
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
29
#Reduced Bias Exponential Hill estimator (kh2)
gamma.HRVE095k1difKh2=Hill1redviesexpK1dif(x, k=k1:k2, k1difKh2,
fun=f)
HRVEk1difKh2svezes[j,]=gamma.HRVE095k1difKh2$estimate
}
# Vectors of the mean estimates of the s replicates
#Geometric estimator
VectormediaG=rep(0,d)
VectormediaG=as.vector(VectormediaG)
for (i in 1:k2) {VectormediaG[i]=mean(Gsvezes[,i],
na.rm=TRUE)}
#Hill estimator
VectormediaH=rep(0,d)
VectormediaH=as.vector(VectormediaH)
for (i in 1:k2) {VectormediaH[i]=mean(Hsvezes[,i],
na.rm=TRUE)}
#Reduced Bias Geometric estimator (kh1)
VectormediaGRVk1difKh1=rep(0,d)
VectormediaGRVk1difKh1=as.vector(VectormediaGRVk1difKh1)
for (i in 1:k2)
{VectormediaGRVk1difKh1[i]=mean(GRVk1difKh1svezes[,i],
na.rm=TRUE)}
#Reduced Bias Exponential Geometric estimator (kh1)
VectormediaGRVEk1difKh1=rep(0,d)
VectormediaGRVEk1difKh1=as.vector(VectormediaGRVEk1difKh1)
for (i in 1:k2)
{VectormediaGRVEk1difKh1[i]=mean(GRVEk1difKh1svezes[,i],
na.rm=TRUE)}
#Reduced Bias Hill estimator (kh1)
VectormediaHRVk1difKh1=rep(0,d)
VectormediaHRVk1difKh1=as.vector(VectormediaHRVk1difKh1)
for (i in 1:k2)
{VectormediaHRVk1difKh1[i]=mean(HRVk1difKh1svezes[,i],
na.rm=TRUE)}
#Reduced Bias Exponential Hill estimator (kh1)
VectormediaHRVEk1difKh1=rep(0,d)
VectormediaHRVEk1difKh1=as.vector(VectormediaHRVEk1difKh1)
for (i in 1:k2)
{VectormediaHRVEk1difKh1[i]=mean(HRVEk1difKh1svezes[,i],
na.rm=TRUE)}
#Reduced Bias Geometric estimator (kh2)
VectormediaGRVk1difKh2=rep(0,d)
VectormediaGRVk1difKh2=as.vector(VectormediaGRVk1difKh2)
for (i in 1:k2)
{VectormediaGRVk1difKh2[i]=mean(GRVk1difKh2svezes[,i],
na.rm=TRUE)}
#Reduced Bias Exponential Geometric estimator (kh2)
VectormediaGRVEk1difKh2=rep(0,d)
VectormediaGRVEk1difKh2=as.vector(VectormediaGRVEk1difKh2)
for (i in 1:k2)
{VectormediaGRVEk1difKh2[i]=mean(GRVEk1difKh2svezes[,i],
na.rm=TRUE)}
#Reduced Bias Hill estimator (kh2)
VectormediaHRVk1difKh2=rep(0,d)
VectormediaHRVk1difKh2=as.vector(VectormediaHRVk1difKh2)
for (i in 1:k2)
{VectormediaHRVk1difKh2[i]=mean(HRVk1difKh2svezes[,i],
na.rm=TRUE)}
#Reduced Bias Exponential Hill estimator (kh2)
VectormediaHRVEk1difKh2=rep(0,d)
VectormediaHRVEk1difKh2=as.vector(VectormediaHRVEk1difKh2)
for (i in 1:k2)
{VectormediaHRVEk1difKh2[i]=mean(HRVEk1difKh2svezes[,i],
na.rm=TRUE)}
# Vectors of the relative mean squared error of the s
replicates
#Geometric estimator
rmseGrel=rep(0,d)
rmseGrel=as.vector(rmseGrel)
for (i in 1:k2)
{rmseGrel[i]=sqrt(mean((Gsvezes[,i]-truevalue)^2,
na.rm=TRUE))/truevalue}
#Hill estimator
rmseHrel=rep(0,d)
rmseHrel=as.vector(rmseHrel)
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
30
for (i in 1:k2)
{rmseHrel[i]=sqrt(mean((Hsvezes[,i]-truevalue)^2,
na.rm=TRUE))/truevalue}
#Reduced Bias Geometric estimator (kh1)
rmseGRVrelk1difKh1=rep(0,d)
rmseGRVrelk1difKh1=as.vector(rmseGRVrelk1difKh1)
for (i in 1:k2)
{rmseGRVrelk1difKh1[i]=sqrt(mean((GRVk1difKh1svezes[,i]-truevalue)^2,
na.rm=TRUE))/truevalue}
#Reduced Bias Exponential Geometric estimator (kh1)
rmseGRVErelk1difKh1=rep(0,d)
rmseGRVErelk1difKh1=as.vector(rmseGRVErelk1difKh1)
for (i in 1:k2)
{rmseGRVErelk1difKh1[i]=sqrt(mean((GRVEk1difKh1svezes[,i]-truevalue)^2,
na.rm=TRUE))/truevalue}
#Reduced Bias Hill estimator (kh1)
rmseHRVrelk1difKh1=rep(0,d)
rmseHRVrelk1difKh1=as.vector(rmseHRVrelk1difKh1)
for (i in 1:k2)
{rmseHRVrelk1difKh1[i]=sqrt(mean((HRVk1difKh1svezes[,i]-truevalue)^2,
na.rm=TRUE))/truevalue}
#Reduced Bias Exponential Hill estimator (kh1)
rmseHRVErelk1difKh1=rep(0,d)
rmseHRVErelk1difKh1=as.vector(rmseHRVErelk1difKh1)
for (i in 1:k2)
{rmseHRVErelk1difKh1[i]=sqrt(mean((HRVEk1difKh1svezes[,i]-truevalue)^2,
na.rm=TRUE))/truevalue}
#Reduced Bias Geometric estimator (kh2)
rmseGRVrelk1difKh2=rep(0,d)
rmseGRVrelk1difKh2=as.vector(rmseGRVrelk1difKh2)
for (i in 1:k2)
{rmseGRVrelk1difKh2[i]=sqrt(mean((GRVk1difKh2svezes[,i]-truevalue)^2,
na.rm=TRUE))/truevalue}
#Reduced Bias Exponential Geometric estimator (kh2)
rmseGRVErelk1difKh2=rep(0,d)
rmseGRVErelk1difKh2=as.vector(rmseGRVErelk1difKh2)
for (i in 1:k2)
{rmseGRVErelk1difKh2[i]=sqrt(mean((GRVEk1difKh2svezes[,i]-truevalue)^2,
na.rm=TRUE))/truevalue}
#Reduced Bias Hill estimator (kh2)
rmseHRVrelk1difKh2=rep(0,d)
rmseHRVrelk1difKh2=as.vector(rmseHRVrelk1difKh2)
for (i in 1:k2)
{rmseHRVrelk1difKh2[i]=sqrt(mean((HRVk1difKh2svezes[,i]-truevalue)^2,
na.rm=TRUE))/truevalue}
#Reduced Bias Exponential Hill estimator (kh2)
rmseHRVErelk1difKh2=rep(0,d)
rmseHRVErelk1difKh2=as.vector(rmseHRVErelk1difKh2)
for (i in 1:k2)
{rmseHRVErelk1difKh2[i]=sqrt(mean((HRVEk1difKh2svezes[,i]-truevalue)^2,
na.rm=TRUE))/truevalue}
# List of outputs
out
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
31
}
##################################################################################
###############################
#### ESTIMATOR FUNCTIONS ####
###############################
## GEOMETRIC ESTIMATOR
Geometric = function (data, k = k1:k2)
{
X 0], decreasing = TRUE)
n
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
32
H
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
33
m=num^(-RO[k1dif])
T1=cumsum(m[1:max(k)])[k]
l
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
34
M3
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
35
out
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
36
l
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
37
tau1=0
numeradorT1=log(M1)-(1/2)*log(M2/2)
denominadorT1=(1/2)*log(M2/2) - (1/3)*log(M3/6)
T1=numeradorT1/denominadorT1
rho1=-abs((3*T1-3)/(T1-3))
tau2=0.5
numeradorT2=M1^(tau2)-(M2/2)^(tau2/2)
denominadorT2=(M2/2)^(tau2/2) - (M3/6)^(tau2/3)
T2=numeradorT2/denominadorT2
rho2=-abs((3*T2-3)/(T2-3))
tau3=1
numeradorT3=M1^(tau3)-(M2/2)^(tau3/2)
denominadorT3=(M2/2)^(tau3/2) - (M3/6)^(tau3/3)
T3=numeradorT3/denominadorT3
rho3=-abs((3*T3-3)/(T3-3))
# Beta estimates (Gomes and Martins (2002))
# at level k1dif
if (fun=="GPD") {
RO
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
38
out
-
BIAS-CORRECTED GEOMETRIC-TYPE ESTIMATORS OF THE TAIL INDEX
39
Sim$rrmseHRVKh1
Sim$rrmseHRVKh2
Sim$rrmseHRVEKh1
Sim$rrmseHRVEKh2
Margarida Brito, Centro de Matemática & Departamento de
Matemática, Faculdadede Ciências da Universidade do Porto, Rua do
Campo Alegre 687, 4169-007 Porto, Por-tugal
E-mail address: [email protected]
Laura Cavalcante, Centro de Matemática da Universidade do
Porto, Rua do CampoAlegre 687, 4169-007 Porto, Portugal
E-mail address: [email protected]
Corresponding Author: Ana Cristina Moreira Freitas, Centro de
Matemática & Fac-uldade de Economia da Universidade do Porto,
Rua Dr. Roberto Frias, 4200-464 Porto,Portugal
E-mail address: [email protected]