Embed Size (px)
Citation preview

Benoit Pigneur and Kartik Ariyur
School of Mechanical Engineering
Purdue University
June 2013
Inexpensive Sensing For Full State Estimation of Spacecraft

Benoit Pigneur - Purdue University 2
Outline
• Background & Motivation
• Methodology
• Test Cases
• Conclusion & Future Work

Benoit Pigneur - Purdue University 3
Background & Motivation
• Next generation/future missions– Increase landing mass (ex: human mission)
MPF MER-A MER-B MSL0
500
1000
1500
2000
2500
3000
3500
entry mass (kg)mass landed (kg)

Benoit Pigneur - Purdue University 4
Background & Motivation
• Next generation/future missions– Increase precision landing
MPF MER-A MER-B MSL0
50
100
150
200
250
300
350
landing ellipse semimajor axis(km)landing ellipse semiminor axis (km)

Benoit Pigneur - Purdue University 5
Background & Motivation
• Next generation/future missions– Reduce operational costs– Improve autonomous GNC
normal nav-igation
Mars Odyssey
01234567
full-time-equivalent navigators

Benoit Pigneur - Purdue University 6
Background & Motivation
• State of the art of GNC algorithms for EDLS
1960 2010MSL: Convex optimization of power-descent
2000
Terminal point controller (Apollo)
Numerical Predictor-CorrectorAnalytical Predictor-Corrector
Gravity Turn
Profile Tracking

Benoit Pigneur - Purdue University 7
Background & Motivation
• Current 2 main directions in development in sensing and state estimation
– Development of better sensor accuracy• Ex: Hubble’s Fine Guidance Sensors
– Improvement in processing inertial measurement unit data• Ex: Mars Odyssey aerobraking maneuver

Benoit Pigneur - Purdue University 8
Background & Motivation
• Improve sensing and state estimation– Develop next generation of autonomous GNC algorithms– Answer some of the challenges for future missions
• Reduce costs– Reduce operational cost during spacecraft operational
life by increasing the autonomy – Reduce cost by using low SWAP (size weight and power)
sensors

Benoit Pigneur - Purdue University 9
Outline
• Background & Motivation
• Methodology
• Test Cases
• Conclusion & Future Work
Benoit Pigneur - Purdue University 10
Methodology
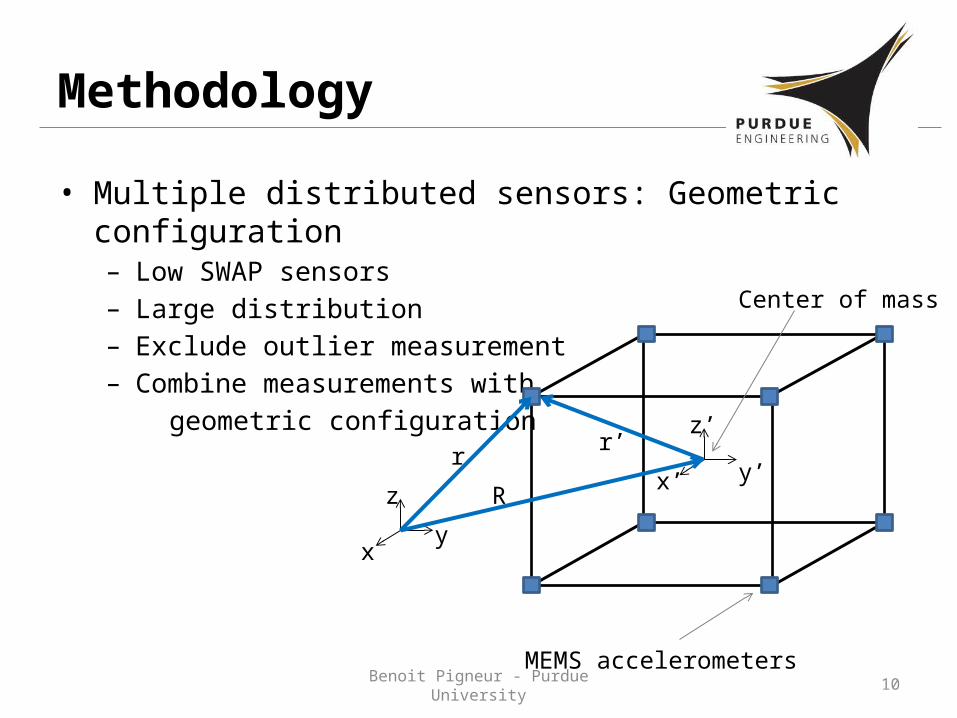
• Multiple distributed sensors: Geometric configuration– Low SWAP sensors– Large distribution– Exclude outlier measurement– Combine measurements with geometric configuration
Center of mass
MEMS accelerometers
x
z
y
x’
z’
y’R
r’r

Benoit Pigneur - Purdue University 11
Methodology
• Mathematical model: rigid body with constant mass– Acceleration equation with inertial to non-inertial frame
conversion formula
– R is the distance in the inertial frame– r’ is the distance in the non-inertial frame (rotating
frame)– ω is the angular velocity– is the angular acceleration
2 2
2 2
'' 2 '
d r d R drr r
dt dt dt

Benoit Pigneur - Purdue University 12
Methodology
• Mathematical model: change of inertia– Inertia -> angular acceleration – Angular velocity -> attitude (Euler angles)
1.Euler equations of motion 2.Kinematic equations
( )
( )
( )
z yxx y z
x x
y x zy x z
y y
y xzz x y
z z
I IM
I I
M I I
I I
I IM
I I
( sin cos ) tan
cos sin
1( sin cos )
cos
x y z
y z
y z

13
Methodology
• Mathematical model: – Assuming r’ is constant for a rigid body (accelerometers are fixed in
the body frame)
– The subscript represents the index of the measurement units– a : linear acceleration of the body in the inertial frame– is the accelerometer position– ω is the angular velocity– is the angular acceleration– is the accelerometer measurement
Benoit Pigneur - Purdue University
ir thi
iA thi
i
2 2
2 2
2 2
( )
( )
( )
xi x y z xi x y yi x z zi y zi z yi
yi y x z yi x y xi y z zi z xi x zi
zi z x y zi x z xi y z yi x yi y xi
A a r r r r r
A a r r r r r
A a r r r r r

Benoit Pigneur - Purdue University 14
Outline
• Background & Motivation
• Methodology
• Test Cases
• Conclusion & Future Work

Benoit Pigneur - Purdue University 15
Test Cases
• 3 different cases: – Circular 2D orbit– Entry, descent and landing– Change of inertia during descent phase
• Comparison between nominal trajectory, standard IMU simulation and distributed multi-accelerometers simulation
• Uncertainty in measurement of acceleration – Error ratio of 1/5 between the standard IMU and the
distributed multi-accelerometers

Benoit Pigneur - Purdue University 16
• Circular 2D orbit:– Simulation conditions:
• circular orbit at 95 km altitude around the Moon• no external force
Test Cases
Benoit Pigneur - Purdue University 17
Test Cases
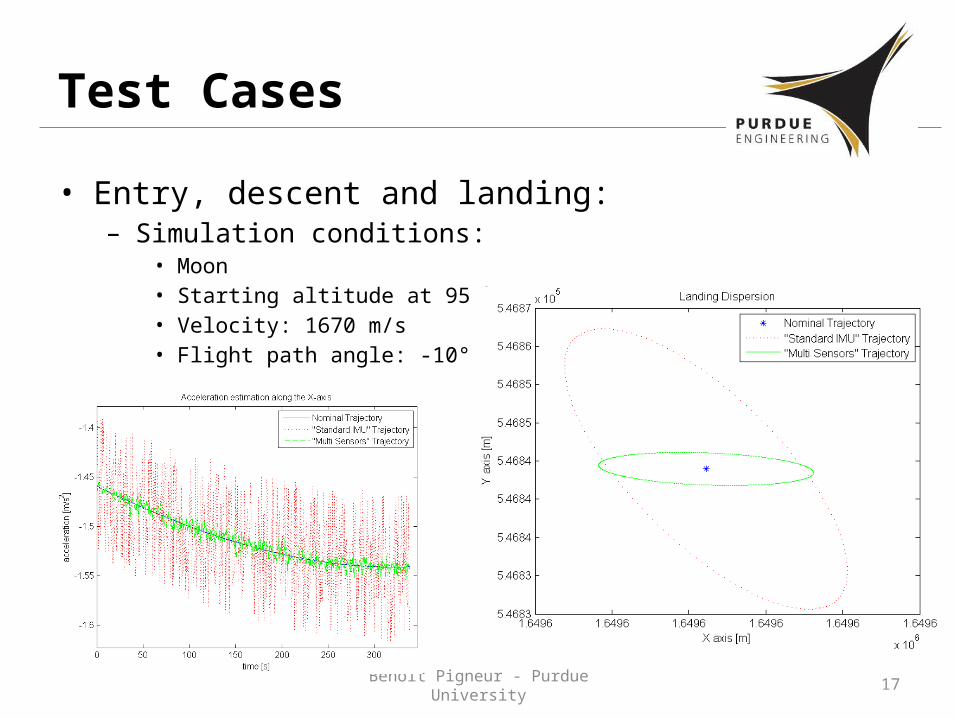
• Entry, descent and landing:– Simulation conditions:
• Moon • Starting altitude at 95 km • Velocity: 1670 m/s• Flight path angle: -10°

Benoit Pigneur - Purdue University 18
Test Cases
• Entry, descent and landing: change of inertia– Simulation conditions:
• Thrusters time: ON at 200s, OFF at 270s• single-axis stabilization along thrust direction

Benoit Pigneur - Purdue University 19
Outline
• Background & Motivation
• Methodology
• Test Cases
• Conclusion & Future Work

Benoit Pigneur - Purdue University 20
Conclusion & Future Work
• Advantages of the proposed method
– Low SWAP sensors reduce the cost
– Optimal geometric configuration and algorithm improve the state estimation
– Distributed sensors (accelerometers) give useful information about flexible and moving parts
– The methodology is applicable to different sensors: MEMS accelerometers, CMOS imagers…

Benoit Pigneur - Purdue University 21
Conclusion & Future Work
• Future Work
– Improve estimation algorithm by development of optimal geometric configuration
– Develop the technique for more challenging environment (atmospheric disturbances, gravity gradient, magnetic field, solar pressure, ionic winds…)
– Develop autonomous GNC based on the improvement of the state estimation
– Develop this method for other sensors
– Improve the attitude estimation for 3-axis stabilized spacecraft

Benoit Pigneur - Purdue University 22
Questions ?
Authors: Benoit Pigneur (speaker): [email protected] Kartik Ariyur
Thanks!





























