-
BeamSensorModels
PieterAbbeelUCBerkeleyEECS
ManyslidesadaptedfromThrun,BurgardandFox,ProbabilisAcRoboAcs
TexPoint fonts used in EMF. Read the TexPoint manual before you
delete this box.: AAAAAAAAAAAAA
-
n
ThecentraltaskistodetermineP(z|x),i.e.,theprobabilityofameasurementzgiventhattherobotisatposiAonx.
n Ques0on:WheredotheprobabiliAescomefrom?
n Approach:Let’strytoexplainameasurement.
ProximitySensors
-
Beam-basedSensorModeln ScanzconsistsofKmeasurements.
n IndividualmeasurementsareindependentgiventherobotposiAon.
},...,,{ 21 Kzzzz =
∏=
=K
kk mxzPmxzP
1
),|(),|(
-
Beam-basedSensorModel
∏=
=K
kk mxzPmxzP
1
),|(),|(
-
TypicalMeasurementErrorsinRangeMeasurements
1. Beamsreflectedbyobstacles
2. Beamsreflectedbypersons/causedbycrosstalk
3. Randommeasurements
4. Maximumrangemeasurements
-
Beam-basedProximityModel
Measurement noise
zexp zmax 0
bzz
hit ebmxzP
2exp )(
21
21),|(
−−
=π
η⎭⎬⎫
⎩⎨⎧ <
=−
otherwisezz
mxzPz
0e
),|( expunexpλλη
Unexpected obstacles
zexp zmax 0
-
Beam-basedProximityModel
Random measurement Max range
max
1),|(z
mxzPrand η=smallz
mxzP 1),|(max η=
zexp zmax 0 zexp zmax 0
-
ResulAngMixtureDensity
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
),|(),|(),|(),|(
),|(
rand
max
unexp
hit
rand
max
unexp
hit
mxzPmxzPmxzPmxzP
mxzP
T
α
α
α
α
How can we determine the model parameters?
-
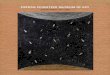
RawSensorData
Measured distances for expected distance of 300 cm.
Sonar Laser
-
ApproximaAonn Maximizeloglikelihoodofthedata
n Searchspaceofn-1parameters.n Hillclimbing
n Gradientdescent
n GeneAcalgorithms
n …
n
DeterminisAcallycomputethen-thparametertosaAsfynormalizaAonconstraint.
)|( expzzP
-
ApproximaAonResults
Sonar
Laser
300cm 400cm
-
ApproximaAonResults
Laser
Sonar
-
"sonar-0"
0 10 20 30 40 50 60 70 01020
30405060
700
0.050.10.150.20.25
InfluenceofAngletoObstacle
-
"sonar-1"
0 10 20 30 40 50 60 70 01020
30405060
700
0.050.10.150.20.250.3
InfluenceofAngletoObstacle
-
"sonar-2"
0 10 20 30 40 50 60 70 01020
30405060
700
0.050.10.150.20.250.3
InfluenceofAngletoObstacle
-
"sonar-3"
0 10 20 30 40 50 60 70 01020
30405060
700
0.050.10.150.20.25
InfluenceofAngletoObstacle
-
n Assumesindependencebetweenbeams.
n JusAficaAon?
n Overconfident!
n Modelsphysicalcausesformeasurements.
n MixtureofdensiAesforthesecauses.
n Assumesindependencebetweencauses.Problem?
n ImplementaAon
n Learnparametersbasedonrealdata.
n
Differentmodelsshouldbelearnedfordifferentanglesatwhichthesensorbeamhitstheobstacle.
n Determineexpecteddistancesbyray-tracing.
n Expecteddistancescanbepre-processed.
SummaryBeam-basedModel