Embed Size (px)
Citation preview

BEAM AND NULL STEERING IN FDA RADARS
AND OTHER CHARACTERISTICS WITH
DIFFERENT GEOMETRIES
SARAH SAEED
A Thesis
Submitted in Partial Fulfillment of the requirements
for the Degree of
Doctor of Philosophy
DEPARTMENT OF ELECTRICAL ENGINEERING
AIR UNIVERSITY
2016

BEAM AND NULL STEERING IN FDA RADARS
AND OTHER CHARACTERISTICS WITH
DIFFERENT GEOMETRIES
Ph.D. Dissertation
SUBMITTED BY
SARAH SAEED REG. NO. Ph.D.-EE-091316
SUPERVISOR
PROF. DR. IJAZ MANSOOR QURESHI
DEPARTMENT OF ELECTRICAL ENGINEERING AIR UNIVERSITY
ISLAMABAD 2016

CERTIFICATE OF APPROVAL
Department of Electrical Engineering
It is hereby certified that Sarah Saeed (Reg # Ph.D.-EE-091316) has successfully completed her
dissertation.
_____________________________
Dr. Ijaz Mansoor Qureshi Air University
Supervisor
____________________________ ____________________________ Dr. Fida Muhammad Khan Dr. Shahryar Saleem
Internal Examiner 1 Internal Examiner 2
Guidance and Evaluation Committee Guidance and Evaluation Committee
____________________________ __________________________
Dr. Aqdas Naveed Malik Dr. Khurram Saleem Alamgir External Examiner External Examiner
Guidance and Evaluation Committee Guidance and Evaluation Committee
____________________________ ___________________________
AVM Saleem Tariq Dr. Zafar Ullah Koreshi Chair Department Dean

BEAM AND NULL STEERING IN FDA RADARS
AND OTHER CHARACTERISTICS WITH
DIFFERENT GEOMETRIES
Ph.D. Dissertation
SARAH SAEED
REG. NO. Ph.D.-EE-091316
SUPERVISOR
PROF. DR. IJAZ MANSOOR QURESHI
FOREIGN RESEARCH EVALUATION EXPERTS
Prof. Dr. WANG HAOQUAN, North University of China, CHINA.
Prof. Dr. AMIR HUSSAIN, University of Stirling, UK
DEPARTMENT OF ELECTRICAL ENGINEERING
AIR UNIVERSITY ISLAMABAD
2016

ABSTRACT
Frequency diverse array (FDA) radars have gained exceptional attention from the researchers
during the past decade, due to their unique range-angle and time modulated beampatterns. This
range–angle dependent beampattern provides additional degrees of freedom in the spatial domain
as compared to a conventional phased array radar that offers only an angle dependent
beampattern. The range-angle- time dependent beampattern with the aid of advanced signal
processing algorithms, has been exploited for interference suppression, beamforming, direction
of arrival estimation, target tracking, and localization in radar environments.
In this dissertation, utilizing the extra degrees of freedom in FDA, new beamforming schemes have
been proposed. In linear frequency diverse array radars (LFDA), null steering in cognitive radar
system has been proposed. This work is a ‘near to implementable form’ of cognitive radar system
that offers a null steering solution both in range and angle dimensions. Similarly frequency offset
selection based 3D adaptive transmit beamforming has been proposed for planar frequency diverse
array radars (PFDA). The proposed scheme outsmarts other existing techniques in terms of
concentrated maxima, deeper nulls and enhanced system signal to interference plus noise ratio
(SINR).
Previous researches have focused largely on evaluating FDA system performance in uniform linear
array (ULA) and uniform rectangular arrays. Despite the advantages and implementation
convenience of other array geometries, they have not been extensively investigated. In this thesis,
new geometries like “circular” and “elliptical” have also been explored in the domain of frequency
diversity. Normally, 3D localization of targets can be achieved with PFDA, but investigation in
this dissertation validates that uniform circular frequency diverse array (UCFDA) offers much
sharper localization, improved directivity and better adaptive beamforming performance as
compared to PFDA. Despite the fact that UCFDA offers much improved beamforming
performance and signal to interference plus noise ratio than PFDA, circular geometry is a high side

lobe geometry. Investigation into elliptical frequency diverse arrays (EFDA) reveals that, much
better range selectivity and reduced side lobe levels can be achieved. Extending the domain of
frequency diversity further, the thesis also focuses on UCFDA and EFDA with non-uniform
frequency offset. The non-uniform function selected for this purpose is tangent hyperbolic
function. The proposed systems not only offers a highly configurable type array system but also
outsmarts the existing non-uniform frequency offset scheme in terms of significantly reduced side
lobe levels.

Copyright by
SARAH SAEED
2016
All rights reserved. No part of the material protected by this copyright notice may be reproduced or
utilized in any form or by any means, electronic or mechanical, including photocopying, recording
or by any information storage and retrieval system, without the permission from the author.

DEDICATED TO
My Family.

CERTIFICATE OF APPROVAL FROM SUPERVISOR
It is certified that the research work contained in this Ph.D. dissertation has been carried out
under my supervision in the Department of Electrical Engineering, Air University, Islamabad. It
is based on original work carried out by the student individually and has not been submitted for
any other degree anywhere else. Moreover, all the other requirements mentioned in the road map
of PhD have been completed. The thesis has also undergone plagiarism test using Turnitin. Its
similarity index is 07.
Signature: _____________________
Supervisor:
Prof. Dr. Ijaz Mansoor Qureshi
Department of Electrical Engineering
Air University,
Islamabad.

i
LIST OF PUBLICATIONS AND SUBMISSIONS
1. S. Saeed, I. M. Qureshi, A.Basit, W.Khan and A.Salman, “Cognitive Null Steering in
Frequency Diverse Array radars,” International Journal of Microwaves and Wireless
Technologies, 2015, (ISI indexed, impact factor 0.46)
2. S. Saeed, I. M. Qureshi, W.Khan, A.Salman (2015). An investigation into uniform
circular frequency diverse array (UCFDA) radars. Remote Sensing Letters, 6(9):707–
714. (ISI indexed, impact factor 1.57)
3. S. Saeed, I. M. Qureshi, W.Khan, A.Salman (2016). Tangent hyperbolic circular
frequency diverse array (TH-CFDA) radars. IET Journal of Engineering. DOI:
10.1049/joe.2015.0194
4. S. Saeed, I. M. Qureshi, W.Khan, A.Salman, “An investigation into elliptical
frequency diverse arrays (EFDA) with uniform and non-uniform frequency offset’,
submitted in Remote Sensing Letters.
5. S. Saeed, I. M. Qureshi, W.Khan, A.Salman “Frequency offset selection based 3D
adaptive beamforming in planar frequency diverse arrays” submitted in IET
Microwaves , Antennas and Propagation.
6. W. Khan, I. M. Qureshi, K.Sultan and S. Saeed, Properties of ambiguity
function of frequency diverse array radar, Remote Sensing Letters, 5(9), 2014,
813-822 (ISI Impact Factor: 1.57)
7. W. Khan, I. M. Qureshi, K. Sultan and S. Saeed, Frequency Diverse Array Radar
with Logarithmically Increasing Frequency Offset, IEEE Antennas and Wireless
Propagation Letters, vol. 14, 2015, pp. 499-502 (ISI Impact Factor: 1.948)
8. A.Salman, I.M.Qureshi, K.Sultan and S. Saeed ,” Joint Spectrum Sensing for
Detection of Primary Users using Cognitive Relays with Evolutionary Computing”,
IET communications, 2015, 9 (13), pp. 1643-1648 (ISI Impact Factor: 0.7) .
The material presented in this dissertation is based on the published papers 1,2 and 3 and the
submitted paper No. 4 and 5.

ii
ACKNOWLEDGMENTS
Thanks to Almighty Allah Whose blessings have encouraged and provided me strength to
conduct this research and to complete this dissertation. There have been moments when I felt it
impossible to complete my research but Almighty Allah has always shown me the way how to
do it.
I am extremely thankful to my supervisor Dr. Ijaz Mansoor Qureshi whose continuous guidance,
and support made it possible to complete this dissertation. His pushing attitude and
encouragement was the key factor throughout my course and research work.
I am highly thankful to AVM Saleem Tariq whose fatherly attitude provided me help and moral
support. I have to give strong credit to Dr. Waseem Khan whose consistent help was a key factor
throughout my work. I also wish to express my gratitude to Dr. Shahryar Saleem who rendered
his help during the final stages of my thesis.
I am grateful to Ms. Ayesha Salman and Mr. Bahman R. Alyaie whose moral support has enabled
me to complete the work. I am extremely thankful to my husband Mohammad Sohail whose
support and cooperation throughout my research work has enabled me to complete the
dissertation. Last but not the least my sincere gratitude to my ailing old parents who kept on
praying for their daughter.
Sarah Saeed.
Jan, 2016

iii
TABLE OF CONTENTS
List Of Publications .............................................................................................................................. i
Acknowledgments ............................................................................................................................... ii
Table of Contents .............................................................................................................................. iii
Lis of Figures ...................................................................................................................................... ix
List Of Tables..................................................................................................................................... xi
List of Abbreviaions .......................................................................................................................... xii
List of Symbols ................................................................................................................................ xiii
Chapter 1: Introducion. ...................................................................................................................... 1
1.1 Applications And Types Of Radar. .................................................................................. 1
1.2 Beamforming .................................................................................................................... 3
1.3 Performance Metrics Of A Radar System. ....................................................................... 4
1.4 Significance Of Array Geometry In Radar Performance: ................................................ 4
1.5 Contributions Of The Thesis. ........................................................................................... 5
1.6 Thesis Organization.......................................................................................................... 7
Chapter 2: Background and Literature Review ............................................................................. 9
2.1 Inroduction ....................................................................................................................... 9
2.2 History Of Radar. ............................................................................................................. 9
2.3 Radar Classifications ...................................................................................................... 12
2.4 Phased Array Radar. ....................................................................................................... 13
2.5 Frequency Diverse Array Radar. .................................................................................... 18

iv
2.5.1 Linear Frequency Diverse Arrays. .......................................................................... 19
2.5.2 Planar Frequency Diverse Arrays. .......................................................................... 23
2.5.3 Array Factor Of PFDA; .......................................................................................... 24
Chapter 3 : Cognitive Null Steering in Linear Frequency Diverse Array Radars ................... 28
3.1 Introduction .................................................................................................................... 28
3.2 System Model ................................................................................................................. 30
3.2.1 Transmitter Processing Unit. .................................................................................. 30
3.2.2 Radar Environment. ................................................................................................ 34
3.2.3 Receiver Processing Unit. ....................................................................................... 35
3.3 Simulations And Results. ............................................................................................... 40
3.3.1 NN Predictor Results .............................................................................................. 40
3.3.2 Null Steering Results .............................................................................................. 44
Chapter 4 : Frequency Offset Selecion Based 3D Adapive Beamforming in Planar FDA
Radars ................................................................................................................................................. 48
4.1 Introduction .................................................................................................................... 48
4.2 Preliminaries And Geometry. ......................................................................................... 50
4.3 Array Signal Processing Model...................................................................................... 51
4.4 Proposed Frequency Offset Selection (FOSS) ............................................................... 53
4.4.1 Condition For Maximum Field ............................................................................... 53
4.4.2 Condition For Null .................................................................................................. 54
4.5 SINR Analysis. ............................................................................................................... 56
4.5.1 MVDR Beamformer. .............................................................................................. 56
4.5.2 Conventional Beamformer. ..................................................................................... 57
4.5.3 FOSS Beamformer .................................................................................................. 58

v
4.6 Simulation Results And Discussion ............................................................................... 58
Chapter 5 : Uniform Circular Frequency Diverse Arrays. ......................................................... 65
5.1 Introduction .................................................................................................................... 65
5.2 Transmit Spatial Beampattern. ....................................................................................... 66
5.3 Beam Steering ................................................................................................................ 67
5.4 Beampattern comparison of UCFDA with LFDA and PFDA. ...................................... 70
5.5 Analysis .......................................................................................................................... 74
5.6 Effect of variation of different parameters on beampattern. .......................................... 76
5.6.1 Case 1. Increasing Radius While Keeping Number Of Elements Fixed: ............... 78
5.6.2 Case 2. Increasing Radius By Increasing Number Of Elements While Keeping
Inter-Element Spacing Fixed ................................................................................................ 78
5.6.3 Case 3. Increasing Number Of Elements While Keeping Radius Fixed. ............... 79
5.7 Adaptive Beamforming and SINR Analysis .................................................................. 83
5.7.1 Simulation Results .................................................................................................. 85
Chapter 6: Tangent Hyperbolic Circular Frequency Diverse Arrays. ...................................... 89
6.1 Inroduction. .................................................................................................................... 89
6.2 Tangent Hyperbolic Function In CFDA......................................................................... 90
6.3 Proposed System Model. ................................................................................................ 92
6.4 Simulations, Results And Discussion ............................................................................ 95
6.5 Scenarios. ....................................................................................................................... 99
Chapter 7: Elliptical Frequency Diverse Arrays......................................................................... 103
7.1 Introduction .................................................................................................................. 103
7.2 Elliptical Frequency diverse arrays (EFDA). ............................................................... 104
7.2.1 Beam Steering ....................................................................................................... 107

vi
7.2.2 Directivity ............................................................................................................. 109
7.2.3 Side Lobe Levels (SLL) ........................................................................................ 110
7.3 EFDA with Non- Uniform Frequency Offset .............................................................. 114
7.3.1 Proposed System Model. ...................................................................................... 115
7.3.2 Simulations, results and discussion....................................................................... 118
Chapter 8 : Conclusions and Future Work. ................................................................................ 120
8.1 Conclusions. ................................................................................................................. 122
8.2 Future Work ................................................................................................................. 124

vii
LIST OF FIGURES
Fig 1.1: Basic antenna beampattern ................................................................................................ 4
Fig 2.1: Würzburg A and Würzburg-Riese [106] ......................................................................... 10
Fig 2.2:A typical air traffic control Radar [108] ........................................................................... 11
Fig 2.3: PAVE PAWS Phased Array Radar [109] ........................................................................ 12
Fig 2.4: Block diagram of radar classification [11] ...................................................................... 13
Fig 2.5: Geometry of uniform linear array. ................................................................................... 16
Fig 2.6: Geometry of uniform rectangular array. .......................................................................... 16
Fig 2.7: Geometry of uniform circular array. ............................................................................... 17
Fig 2.8: Beampattern of linear phased array. (N=10, d=λ/2 ) ....................................................... 17
Fig 2.9: Beampattern of linear frequency diverse array. (N=10, d=λ/2, ∆f=1kHz) ...................... 21
Fig 2.10 : Variation of field intensity with respect to time in LFDA. (N=10, d=λ/2, ∆f=1kHz, R
=3km, Ɵ = 20° ) ........................................................................................................................... 22
Fig 2.11: Variation of field intensity with respect to range in LFDA. (N=10, d=λ/2, ∆f=1kHz,
t=0.3msec, Ɵ = 20° ) .................................................................................................................... 22
Fig 2.12: Variation of field intensity with respect to 𝑠𝑖𝑛𝜃 in LFDA. (N=10, d=λ/2, ∆f=1kHz,
t=0.3 msec R =3km) ...................................................................................................................... 23
Fig 2.13: Geometry of Planar frequency diverse array. ................................................................ 24
Fig 2.14: (a) Range-elevation profile of PFDA. (b) Range-azimuth profile of PFDA. (N=8, M=8,
dx=dy=λ/2 , ∆fx=∆fy=1 kHz ) ...................................................................................................... 27
Fig 3.1: Block Diagram of FDA radar for cognitive null steering................................................ 31
Fig 3.2: FDA transmitter. .............................................................................................................. 32
Fig 3.3: Range angle plot of the assumed trajectory. .................................................................... 34
Fig 3.4: Block diagram of NARX model. ..................................................................................... 38
Fig 3.5: Prediction plots (a) for range time series (b) angle time series. ...................................... 43
Fig 3.6: (a) Field versus angle with time and range fixed. (b) Field versus range with time and
angle fixed ..................................................................................................................................... 45
Fig 3.7 : Periodicity of nulls (a) 2D representation (b) 3D representation. .................................. 46

viii
Fig 3.8: Range angle beampattern of FDA with proposed offset for (a) (−49°, 3𝑘𝑚), (b)
(−40°, 4𝑘𝑚), (c) (−20°, 2.5𝑘𝑚), (d) (0°, 2.8𝑘𝑚), (e) (10°, 4.5𝑘𝑚), (f) (20°, 5𝑘𝑚). ................ 47
Fig 4.1: Geometry of PFDA.......................................................................................................... 51
Fig 4.2: 4D sliced visualization of field obtained by FOSS beamformer (M=8, N=8, 𝑑𝑥 = 𝑑𝑦 =
𝜆2, ∆𝑓𝑥 = 9kHz and ∆𝑓𝑦 = −6.4 kHz (a) Range –elevation beampattern at fixed azimuth angle
of target and interference. (b) Range azimuth field pattern at fixed target and interferer elevation
angles (c) Field pattern at fixed target and interferer ranges. ....................................................... 60
Fig 4.3: 4D sliced visualization of field obtained by MVDR beamformer (M=8, N=8, 𝑑𝑥 = 𝑑𝑦 =
𝜆2 ∆𝑓𝑥 = 10kHz, ∆𝑓𝑦 = 1kHz) (a) Range –elevation beampattern at fixed azimuth angle of
target and interference. (b)Range azimuth field pattern at fixed target and interferer elevation
angles (c) Field pattern at fixed target and interferer ranges. ....................................................... 61
Fig 4.4: Null depth comparison (M=8, N=8, 𝑑𝑥 = 𝑑𝑦 = 𝜆2 ) (a) CB (∆𝑓𝑥 = 10kHz, ∆𝑓𝑦 =
1kHz) (b) MVDR beamformer (∆𝑓𝑥 = 10kHz, ∆𝑓𝑦 = 1kHz) (c) FOSS beamformer (∆𝑓𝑥 =
9kHz and ∆𝑓𝑦 = −6.4 kHz ) ........................................................................................................ 63
Fig 4.5: Output SINR versus input SNR of CB (∆𝑓𝑥 = 10kHz, ∆𝑓𝑦 = 1kHz), MVDR (∆𝑓𝑥 =
10kHz, ∆𝑓𝑦 = 1kHz) beamformer, and FOSS beamformer (∆𝑓𝑥 = 9kHz and ∆𝑓𝑦 = −6.4 kHz )
for PFDA with (M=8, N=8, 𝑑𝑥 = 𝑑𝑦 = 𝜆2, INR =30dB). .......................................................... 64
Fig 5.1: Geometry of UCFDA. ..................................................................................................... 67
Fig 5.2: 4D beampattern of UCFDA at (30°, 4𝑘𝑚, 60°). (a) at fixed target azimuthal angle of
60°. (b) at fixed target elevation angle of 30°. (c) at fixed target range of 4km. .......................... 69
Fig 5.3: 3 D Transmit spatial beampattern of UCFDA. (a) Range-elevation profile for fixed 𝜑 =
60°. (b) Range-azimuth profile for fixed 𝜃 = 30°. ....................................................................... 71
Fig 5.4: (a) Range-elevation profile of LFDA. (b) Range-elevation profile of PFDA at 𝜑 = 60°.
(c) Range-azimuth profile of PFDA at 𝜃 = 30°. .......................................................................... 72
Fig 5.5: 2D beampattern of LFDA, UCFDA and PFDA for Δf= 1kHz,and N=9. ........................ 73
Fig 5.6: Periodic pattern of time in UCFDA with (a) Δf= 1kHz (b) Δf= 2kHz ............................ 75
Fig 5.7: Periodic pattern of range in UCFDA with (a) (a) Δf= 1kHz (b) Δf= 2kHz .................... 76
Fig 5.8: (a) Range-angle beampattern in LFDA. (b) Range –elevation profile for fixed azimuth
angle in UCFDA. (c) Range –azimuth profile for fixed elevation angle in UCFDA. .................. 77

ix
Fig 5.9: Beampattern of UCFDA for Case 1 with N=10, Δf= 2kHz and (a) a=1λ (b) a=3λ, (c)
a=5λ ............................................................................................................................................... 80
Fig 5.10: Beampattern of UCFDA for Case 2 with d=0.5λ, Δf= 2kHz and (a) N=10, (b) N=20, (c)
N=30. ............................................................................................................................................ 81
Fig 5.11: Beampattern of UCFDA for Case 3 with a=5λ, Δf= 2kHz and (a) N=10, (b) N=20, (c)
N=30. ............................................................................................................................................ 82
Fig 5.12: Adaptive beampattern for ULPA .................................................................................. 86
Fig 5.13: ABF pattern of PFDA .................................................................................................... 87
Fig 5.14: Comparative curve of input SNR versus output SINR, with input INR=30dB. ........... 88
Fig 6.1: Tangent hyperbolic function............................................................................................ 91
Fig 6.2: (a). Frequency offset distribution along the elements of CFDA. (b). Geometry of CFDA
in spherical coordinate system ...................................................................................................... 93
Fig 6.3: For N=20, Δf= 20 kHz (a) Range-elevation beampattern of TH-CFDA with 𝛾 = 0.03.
(b). Range-azimuth beampattern of TH-CFDA with 𝛾 = 0.03. ................................................... 95
Fig 6.4: For N=20, Δf= 5 kHz (a) Range-elevation profile of TH-CFDA = 0.5 (b) Range-
elevation profile of log-CFDA (c) Range-elevation profile of TH-CFDA with = 5. (d) Range-
azimuth profile of Tan-hyperbolic CFDA = 0.5. (e) Range-azimuth profile of log-CFDA (f)
Range-azimuth profile of TH-CFDA with = 5 ........................................................................... 97
Fig 6.5: 2D comparison of TH-CFDA and Log –FDA for N=20, Δf= 3 kHz and = 0.5 . ........ 98
Fig 6.6: (a) 𝑅, 𝜃 response of TH-CFDA in scenario A. (b) 𝑅, 𝜑 response of TH-CFDA in
scenario A. .................................................................................................................................. 100
Fig 6.7: (a) (𝑅, 𝜃) response of TH-CFDA in scenario B. (b) (𝑅, 𝜑) response of TH-CFDA in
scenario B.................................................................................................................................... 102
Fig 7.1:Geometry of EFDA ........................................................................................................ 106
Fig 7.2: For an EFDA (N= 16, e = 0.5, Δf= 3 kHz) (a) Range-elevation profile (b) Range –
azimuth profile ............................................................................................................................ 108
Fig 7.3: Radiation pattern of EFDA along elevation angle axis with N=16, Δf= 3kHz (a) e=0,
(b) e=0.5, (c) e=0.9 ..................................................................................................................... 111

x
Fig 7.4: Radiation pattern of EFDA along azimuthal angle axis with N=16, Δf= 3kHz (a) e=0,
(b) e=0.5, (c) e=0.9 ..................................................................................................................... 111
Fig 7.5: Radiation pattern of EFDA along range axis with N=16, Δf= 3kHz (a) e=0, (b) e=0.5, (c)
e=0.9 ........................................................................................................................................... 112
Fig 7.6: Radiation pattern along range axis for N=16, Δf= 3kHz (a) UCFDA (b) PFDA (c)
EFDA(e=0.5) .............................................................................................................................. 113
Fig 7.7: Directivity versus eccentricity in EFDA (b) Side lobe levels in elevation angle versus
eccentricity in EFDA .................................................................................................................. 113
Fig 7.8: Periodicity of EFDA in time for N=16, Δf= 3kHz. ...................................................... 114
Fig 7.9: For N=16, Δf= 30kHz (a) Range-elevation beampattern of TH-EFDA with = 0.03. (b).
Range-azimuth beampattern of TH-EFDA with = 0.03. .......................................................... 117
Fig 7.10: For N=16, Δf= 3kHz (a) Range-elevation profile of TH-EFDA = 0.1 (b) Range-
elevation profile of log-EFDA (c) Range-elevation profile of TH-EFDA with = 5. (d) Range-
azimuth profile of TH-EFDA = 0.1 (e) Range-azimuth profile of Log-EFDA (f) Range-azimuth
profile of TH-EFDA with = 5. ................................................................................................. 118
Fig 7.11: Radiation pattern of TH-EFDA along elevation angle axis with N=16, Δf= 3kHz, =
0.1 (a) e=0, (b) e=0.5, (c) e=0.9 .................................................................................................. 119
Fig 7.12: Radiation pattern of TH-EFDA along azimuthal angle axis with N=16, Δf= 3kHz, =
0.1 (a) e=0, (b) e=0.5, (c) e=0.9 .................................................................................................. 120
Fig 7.13: Radiation pattern of TH-EFDA along range axis with N=16, Δf= 3kHz, = 0.1 (a) e=0,
(b) e=0.5, (c) e=0.9 ..................................................................................................................... 121

xi
LIST OF TABLES
Table 3.1: Locations of the interference source and the frequency offsets so obtained……… 44
Table 5.1: Simulation Parameters:(a and d expressed in wavelength λ)……………………… 73
Table 5.2: HPBW and PSLR for all the three cases…………………………………………… 79
Table 5.3: Simulation parameters for adaptive beamforming and SINR analysis……………….86

xii
LIST OF ABBREVIATIONS
AF Array factor
EFDA Elliptical frequency diverse array
FDA Frequency-diverse array
LFDA Linear frequency diverse array
MIMO Multiple-input-multiple-outputPAR Phased-array radar
MVDR Minimum Variance Distortionless Response
PFDA Planar frequency diverse array
SINR Signal-to-interference-plus-noise ratio
SNR Signal-to-noise ratio
TH-CFDA Tangent hyperbolic circular frequency diverse array
TH-EFDA Tangent hyperbolic elliptical frequency diverse array
UCFDA Uniform circular frequency diverse array

xiii
LIST OF SYMBOLS
N Number of antennas in an array
d Inter-antenna distance in an array of antennas
c Speed of light
T Pulse duration
θ Elevation angle
θ0 Specific value of θ at which the radar expecting a target
R Range of a target
R0 Specific value of R at which the radar is expecting a target
φ Azimuth angle
φ0 Specific value of φ at which the radar expecting a target
λ Wavelength
f0 Working frequency of the radar.
k Wavenumber

1
Chapter 1
INTRODUCTION
Radar is a remote sensing system that transmits electromagnetic waves. These waves after being
reflected can be detected by the radar receiver system to extract the required information [1].
Normal functions of radar include measuring range, speed and angular position of a target.
However, more complex functions include target signature analysis in order to get information
about target size, shape and material composition. Radars find their wide usage in many
commercial applications such as weather, terrain avoidance, tracking, early warning systems,
track-while-scan, fire control, and over the horizon applications. On the other hand, radar also
finds a wide usage in military applications as it is an integral part of nearly all aircrafts, ships,
missiles, tanks, ground stations and helicopters etc.
1.1 APPLICATIONS AND TYPES OF RADAR.
On the basis of specific radar characteristics, such as waveforms used, antenna type, frequency
band, and missions, radars can be classified into diverse categories. As far as the waveforms are
concerned, radars can be categorized as continuous wave (CW) radars, and pulsed wave (PW)
radars. CW radars emit electromagnetic waves continuously; however, PW radars emit a train of
pulsed waveforms. Regarding the categorization based on frequency bands, radars lying in
different frequency bands have different applications. For example, high frequency (HF) radars
are used for the target detection beyond the horizon. The Early Warning Radars (EWR) mostly
utilize very high frequency (VHF) and ultra-high frequency (UHF) bands. The ground and
marine based systems operate in L band (long range applications) and S band (medium range

2
applications). Radars in C band are employed in fire control military operations and weather
detection systems while those in X band are used for very fine target detections. Traffic police
radars and terrain avoidance radars are Ku, Ka and K band radars [2].
On the basis of distances between the transmitter and receiver, radars can be categorized as
monostatic, bistatic and quasi-monostatic radars. Considering target as a reference point, in
monostatic radars, the transmitter and receiver are collocated as viewed from the reference point
(i.e., transmit and receive antennas are same). In bistatic radars, however the transmit and receive
antennas are located at different locations with respect to the reference point (e.g., an airborne
receiver and a ground based transmitter). In quasi-monostatic form of radars, the transmit and
receive antennas are located at slightly distant locations but still appear to be at the same location
as viewed from the reference point (e.g., an aircraft with separate transmit and receive antennas)
[3]. Depending upon the number of antennas, there are two basic categories, conventional single-
antenna radars and multiple-antenna radar. The conventional single antenna radars rotate
mechanically in order to scan entire angular space. However, the modern form of radar is the
multiple antenna radar, most commonly known as phased array radars where beam steers
electronically. There exists another very popular form of radar systems known as multiple-input-
multiple-output (MIMO) radar. MIMO radar is different from phased array radar (PAR) in the
sense that every antenna emits different waveform, unlike phased array radar where every single
antenna emits the same waveform.
Now in both the above mentioned multi-antenna radar systems, each element of the array
transmits same frequency. In 2005, a new concept of radar system was originated, known as
frequency diverse array (FDA) radar. In FDA each element of the array transmits a different
frequency. The inter element frequency difference is termed as frequency offset. This frequency
offset can be small or large. Small frequency offset has been employed in beamforming
applications. The beampattern generated as result of this small inter element frequency offset is
quite unique in the sense that it is range-angle dependent, unlike the beampattern of PAR
systems, which is only angle dependent. This range-angle dependent beampattern has resulted in
numerous benefits which include increased range resolution and effective mitigation of range-
angle dependent interference sources and clutter. This suppression of undesired sources in turn

3
increases the signal to interference noise ratio (SINR) of the system. Furthermore, the
beampattern is time and space modulated. The maxima of beampattern do not stay at a particular
point, rather it drifts in space as well as in time. This drift in time however helps the radar to scan
the entire space without use of phase shifters and this phenomenon is known as ‘auto scanning
feature”. Regarding large inter element frequency offsets, independent echoes of the target can
be effectively achieved. Thus in both cases, FDA offer greater degree of freedom and a highly
effective radar scene information utilization.
1.2 BEAMFORMING
Beamforming plays the most crucial role in a wide range of applications such as wireless
communications, sensor networks, radar, satellite navigation, and biomedical engineering. In
particular, with the extensive research activities devoted to the radar systems, from airborne
systems to ground surveillance radars, and from avian surveillance to weapon location
applications, an unprecedented attention has been devoted to robust beamforming techniques,
antenna array design and signal processing. Adaptive beamforming focuses maximum gain at the
aim point while countering the jamming threats or other unwanted interferences by significantly
nullifying power from the undesired directions [4]. This is accomplished by combining waves
emitted by the array elements in such a way that signals at specific angles combine
constructively to form a main directional beam while, the waves emitted in other directions
experience destructive interference to form nulls of the beampattern [5]. In communications,
beamforming is employed to point an antenna at the desired signal source while reducing
interferences and hence improving the communication quality. Moreover, beamforming is also
used in all the direction finding applications [6]. Usually in classical ABF, the weighs for each
antenna elements are adjusted with phase variation using different algorithms and optimizing
techniques, amplitude and element position control.

4
1.3 PERFORMANCE METRICS OF A RADAR SYSTEM.
The performance of radar can be judged by a number of parameters, for example range
resolution, angular resolution, Doppler resolution, probability of false alarms, maximum
detection range, received SINR etc. Since antenna array systems are the front end players of a
radar system, improvement in the antenna array performance in turn results in an enhanced
performance of the radar systems.
As far as beamforming and array radiation pattern analysis is concerned, the performance of an
array is evaluated by the directional gain, half power beam width, side lobe level and null depths.
1.4 SIGNIFICANCE OF ARRAY GEOMETRY IN RADAR
PERFORMANCE:
Apart from different beamforming techniques, geometries of the antenna array configurations
also play a key role in overall system performance [7]. For example, linear arrays have the
highest directivity as compared to other configurations. However, the main drawback of linear
arrays is that beam does not scan well in all the azimuthal directions. Thus all the applications
Fig 1.1: Basic antenna beampattern [115]

5
where 2D radar imaging is employed and the system requires angular information in azimuth as
well as in elevation; rectangular arrays are used. In rectangular arrays the beam scans around
360° azimuthally, but still a major disadvantage of the rectangular geometry is that an additional
major lobe of the same intensity appears on the opposite side [8]. Here the symmetry of the
circular array structure outsmarts the rectangular arrays. The beampattern synthesized using
circular array can be rotated electronically without a major lobe replica [9]. On the other hand, a
circular array is high side-lobe geometry. Thus in order to reduce the side lobes if the inter-
element spacing is decreased, the mutual coupling effect becomes more pronounced. For the
mitigation of high side-lobe levels, multi-ring structures and hexagonal array are utilized for
smart antenna applications. In short, different array configurations can be employed in different
radar missions, depending upon the operational requirements.
Since this thesis focusses on performance of different geometries in FDA radars, the
performance parameters e.g., directional gain, half power beam width, side lobe level, null
depths and SINR are considered.
1.5 CONTRIBUTIONS OF THE THESIS.
This thesis focuses on performance of the proposed beamforming schemes in existing FDA
geometries. Despite the advantages and implementation convenience of different other array
geometries, FDA are limited to linear and rectangular arrays only. The thesis hence makes a
contribution in bringing a single unit 3D radar system into realization by investigating different
other geometries of antenna arrays in the domain of frequency diversity. Objectives achieved in
this thesis include:
A cognitive null steering technique has been developed using linear frequency
diverse arrays (LFDA) in a non-stationary radar environment. The radar system
scheme presented not only estimates the direction of arrival of the signal source, but
also predicts the next possible location with the result that the system is able to
maintain the deepest null at the interferer location. The proposed null steering

6
technique localizes the null at the interference not only in angle but also in range,
and hence outsmarts other existing null steering techniques in PAR.
A new and simple approach to 3D transmit adaptive beamforming (ABF) in planar
frequency diverse array (PFDA) using frequency offset selection scheme (FOSS) has
been proposed. MVDR (Minimum Variance Distortionless Response) beamformer
capability has also been explored in PFDA in order to make an in depth comparison
of the beamforming performance of the proposed scheme. The beamforming
performance has been evaluated in terms of null depths and SINR.
Circular arrays have been explored in a frequency diverse perspective and a new
class of FDA, by the name uniform circular frequency diverse arrays (UCFDA) has
been proposed. Theory, analysis, basic beam steering, adaptive beamforming and
SINR analysis in uniform circular frequency diverse arrays (UCFDA) is presented
along with comparison with linear and rectangular counterparts.
Circular frequency diverse array (CFDA), with non-uniform frequency offset has
been proposed. The non-uniform function selected for this purpose is tangent
hyperbolic function. Investigation reveals a 3D single maximum beampattern, which
promises to enhance system detection capability and SINR. Furthermore, by utilizing
the properties of tangent hyperbolic function, a highly configurable type array
system is achieved, where beampatterns of three different configurations of FDA can
be generated, by just adjusting a single function parameter. The proposed non-
uniform frequency offset scheme also offers reduced side lobe levels as compared to
other existing non-uniform frequency offset schemes.
A new geometry by the name of Elliptical frequency diverse array (EFDA) has been
proposed. The foresaid geometry has been analyzed with a uniform and non-uniform
frequency offset. Analysis reveals highly range selective beampatterns with
decreasing side lobe levels. A beampattern comparison with all existing 2D FDA

7
geometries proves that EFDA has the narrowest beam and lowest side lobe levels
along range axis. Furthermore, thesis investigates tangent hyperbolic function for
non-uniform frequency offset scheme in EFDA and reveals lower side lobe levels
and significant range selective beampatterns.
1.6 THESIS ORGANIZATION.
The thesis has been organized as follows:
In chapter 1, an overview of the radar and radar performance has been presented. Moreover, the
goals, objectives and achievements of the research work done in this thesis have been
highlighted.
In chapter 2, a brief history of radar, radar classification and an overview of phased-array radar
have been given. Afterwards, latest research work in FDA radar, and different existing
geometries of FDA radars has been discussed in detail.
In chapter 3, a cognitive 2D null steering technique in linear frequency diverse array radars has
been proposed that not only localizes the interference source but also predicts its next location
while placing and maintaining the deepest null of the beampattern at the desired location.
In chapter 4, frequency offset selection based 3D adaptive beamforming in planar FDA radars
has been proposed. Proposed methodology places maximum of the beampattern at the target and
null at the interferer simultaneously. The proposed scheme outsmarts other adaptive
beamforming schemes in terms of null depths and improved SINR values.
In chapter 5, Circular geometry has been explored in frequency diverse arrays and an extensive
investigation into the proposed system has been conducted. Comparisons of the beampattern,
adaptive beamforming and SINR performance have also been made with other existing
geometries.

8
In chapter 6, a tangent hyperbolic based non uniform frequency offset selection scheme has been
proposed for circular frequency diverse arrays. The chapter focuses on exploration of tangent
hyperbolic function performance and its particular benefits when employed in circular frequency
diverse arrays.
In chapter 7, elliptical frequency diverse arrays have been investigated with uniform frequency
offset and non-uniform frequency offset. Effect of eccentricity of the ellipse on beampatterns has
been thoroughly investigated. For a non-uniform frequency offset scheme, again the function
chosen is tangent hyperbolic function.
In chapter 8, we have concluded our thesis and also suggested some future directions for research
in this field.

9
Chapter 2
BACKGROUND AND LITERATURE
REVIEW
2.1 INRODUCTION.
This chapter presents a brief history of radar technology with emphasis on very common types of
radar systems i.e. phased array radars. The chapter further focusses on a relatively new
generation of radar systems i.e. frequency diverse array radars. Along with the fundamentals of
the aforementioned radar configurations, a comprehensive review of past and current research
has also been presented.
2.2 HISTORY OF RADAR.
The engineers of the 20th century can count themselves lucky that the bat left the technical
invention of radar to them [10]. Formally, however, the origins of radar technology had their
roots back in the year 1900. In 1934 that Dr. Kuhnhold developed first radio ranging system,
more commonly called radar system. In March 1939 TELEFUNKEN introduced Würzburg, an
anti-aircraft artillery radar with its characteristic 3m parabolic reflector antenna as shown in Fig.
2.1.
At the end of World War II, in USA radar development proceeded significantly. Since then,
radar technology has witnessed a series of innovations. The area of coherent system operation
and Doppler signal processing, for instance, saw much advancement. Another breakthrough in
the field of radar tracking technology was the “monopulse tracking system”. In June 1951, real

10
milestone was achieved in the form of the idea of Synthetic Aperture Radar (SAR) by C. Wiley
of Goodyear Aircraft Corporation. His postulate resulted in extremely high angular resolution of
radar. Although the radar technology was basically flourished by military, several civilian
applications also benefited from the technology. Most significant of these civilian applications
include air traffic control (ATC) and marine navigation safety. TELEFUNKEN developed the
first ATC in 1955. This ATC radar remained in use under the name Ground Radar System (GRS)
between 1955-1957.
Fig 2.1: Würzburg A and Würzburg-Riese [111]

11
The successor of GRS is SRE-M (Surveillance Radar Equipment-Medium Range) and is in
operation since 1976 until today. The radar technology experienced a quantum leap in 1990, with
the invention of phased array radars (PAR). As compared to a classical, mechanically moved
antenna based radar system, PAR is capable of producing a beam, which can switch from one
angular sector to another without perceptible delay. Thus mechanically moved antennas were
upgraded to electronically steered antennas. Because of this capability PAR finds immense usage
in diverse practical radar systems like ship borne and ground based radars, fighter radars.
Fig 2.2:A typical air traffic control Radar [113]

12
2.3 RADAR CLASSIFICATIONS
This section deals with the classification of radars, depending upon the functions performed. The
block diagram in Fig.2.4 [11] shows a simple radar classification hierarchy.
A Primary radar, as the name indicates performs the primary function of radar, which is to
transmit high-frequency signals toward the target and process the returned signals to extract
related target information. Primary radar can be further classified as continuous wave (CW) radar
and pulsed radar.
CW radars continuously transmit and receive high-frequency signals. CW radars may be bistatic
or monostatic. They can further be categorized as un-modulated CW radars and modulated CW
radars. Unmodulated CW radar is the one that uses the waves with constant amplitude and a
constant frequency. It can only measure speed and has no ranging or target classification ability.
Fig 2.3: PAVE PAWS Phased Array Radar [114]

13
In modulated CW radar, frequency is repeatedly swept between 𝑓1 and 𝑓2. The received echoes
then help in range calculations. Secondary radar system works with active echoes. It can be
termed as an interrogator.
2.4 PHASED ARRAY RADAR.
Phased array radar (PAR) is the most popular and common form of radar. In its simplest form it
is an arrangement of an array with relative phase difference between the successive elements.
From the date of its origin in 1930’s [12], PAR had been in the focus of researchers till to date
[13], [14] and has undergone through many phases of maturity and advancement [15]. PAR
systems find immense utility in different applications like multi-function radar for military use,
airborne radar for surveillance (RBE2), space borne synthetic aperture radar (SAR),
communications for remote sensing and radio astronomy etc. [16]. In PAR, beam is steered in
the desired direction electronically i.e. each transmit antenna has a phase shifter and the resultant
beam is formed by shifting the phase of the signal emitted by each radiating element [17]. As far
as geometry is concerned, the radiating elements can be arranged in either a straight line in 1D or
in a 2D plane i.e. rectangular or circular array [18], with either uniform inter-element spacing
[19] or non-uniform inter-element spacing [20]. Mathematically the array factor of an N element
linear array, shown in Fig. 2.5 is given by
Fig 2.4: Block diagram of radar classification [11]

14
𝐴𝐹 = ∑ 𝑤𝑛∗𝑒𝑗𝑛𝑘𝑑𝑠𝑖𝑛𝜃𝑁−1
𝑛=0 (2.1)
Where n is the element index, 𝑘 = 2𝜋𝜆⁄ is the wave number, 𝑑 is the inter element spacing, 𝜃 is
the elevation angle, 𝑤𝑛 is the complex weight associated with nth element.
In vector form:
𝐴𝐹 = 𝐰𝐻𝐚(𝜃) (2.2)
where w is the N× 1 weight vector.
𝐚(𝜃) is the array steering vector of the form
𝐚(𝜃) = [1 𝑒𝑗𝑘𝑑𝑠𝑖𝑛𝜃 𝑒2𝑘𝑑𝑠𝑖𝑛𝜃 ……… . 𝑒(𝑁−1)𝑘𝑑𝑠𝑖𝑛𝜃]𝑇 (2.3)
Note that (. )∗, (. )𝐻, (. )𝑇 represent conjugate, hermitian and transpose of a vector or matrix
respectively.
The weight vector described above can be set in order to form a desirable beampattern. For
uniform weights, i.e. 𝑤𝑛 = 1; the beampattern of linear phased array, defined as the magnitude
square of the array factor, is given by
𝐵𝑇(𝜃) = |sin𝑁𝜓
2⁄
𝑠𝑖𝑛𝜓2⁄
|
2
(2.4)
where 𝜓 = 𝑘𝑑 𝑠𝑖𝑛𝜃.
The phenomenon of pointing beam in the desired direction is called beam steering or
conventional beamforming. Adaptive beamforming (ABF) is a real time processing which
encounters unwanted sources by pointing null of the pattern towards undesired sources while still
maintaining main lobe towards the intended point [18]. Main difference between adaptive and
conventional beamforming (CBF) is that, ABF can focus null in the undesired direction while
CBF cannot [21]. The weight vector of a conventional beamformer is 𝐰 = 𝐚(𝜃0), where 𝜃0 is

15
the desired look angle where the main lobe of the pattern is to be focused. Similarly many
adaptive beamformer techniques exist in the literature i.e. Linear Constraint Minimum Variance
(LCMV) [22]-[26], Minimum Variance Distortion-less Response (MVDR) [27]-[31] are some of
the most popular ABF techniques.
As far as geometries of arrays are concerned, elements of the array are either arranged linearly
i.e. linear phased arrays or in a plane i.e. rectangular phased arrays, circular phased arrays and
hexagonal phased arrays [32]. Fig. 2.5 – Fig 2.7 shows the respective geometries. For the given
geometry of rectangular phased array in Fig. 2.6, the beampatterns is given as [33]:
𝐵𝑇(𝜃, 𝜑) = |{sin(
𝑀𝛷𝑥2⁄ )
sin(𝛷𝑥
2⁄ )} × {
sin (𝑁𝛷𝑦)⁄2)
sin(𝛷𝑦
2⁄ )
}|
2
(2.5)
Where
𝛷𝑥 = 𝑘𝑑𝑥𝑠𝑖𝑛𝜃0𝑐𝑜𝑠𝜑0 (2.6)
𝛷𝑦 = 𝑘𝑑𝑦 𝑠𝑖𝑛𝜃0𝑠𝑖𝑛𝜑0
Similarly, for the geometry of circular array in Fig. 2.7., the beampatterns of circular phased
array is given as:
𝐵𝑇(𝜃, 𝜑) = |∑ exp {j2π( 𝑓0𝑎
csin𝑁−1
𝑛=0 𝜃 cos(𝜑 − 𝜑𝑛)}|2
(2.7)
As apparent from Eq. (2.5), the beampattern of a conventional linear PAR depends upon
elevation angle 𝜃 only, while Eq. (2.6) and Eq. (2.7) show that beampattern depends upon
elevation as well as azimuth angle 𝜑. Thus the planar geometries provide elevation as well as
azimuthal coverage of the radar scene i.e. 2D beam scanning capability.

16
Fig 2.6: Geometry of uniform rectangular array.
Fig 2.5: Geometry of uniform linear array.

17
Fig 2.7: Geometry of uniform circular array.
Fig 2.8: Beampattern of linear phased array. (N=10, d=λ/2 )

18
2.5 FREQUENCY DIVERSE ARRAY RADAR.
The concept of a Frequency Diverse Array (FDA) is different to PAR, in the sense that every
element of the array transmits and receives a different frequency unlike PAR where all the array
elements are working at the same frequency. The concept of FDA, for the very first time, was
presented by Dr. M.C. Wicks, Senior Scientist in Air Force Research Laboratory (AFRL) Rome
NY, during a keynote address in 2005. Since then FDA had been an attraction for the researchers
[34]-[38]. In the standard form of FDA, there is a linear, progressive frequency shift along the
aperture of the array. The unique frequencies at each antenna element produce a “range-angle
dependent” beampattern, unlike PAR, where the beampattern is only angle dependent [39].
Furthermore [40] proposed that the system designers may enjoy an additional degree of freedom
due to time-range and angle modulated beampattern. This range-angle –time dependent
beampattern allows the radar system to focus the transmitted power in a desired range-angular
sector [41]. This feature finds immense utility in suppressing the range-dependent clutter and
interferences [42]; improving SAR imaging resolution [43], range angle estimation [44] and
imaging [45] in turn, improving received SINR. Secondly the time dependency of the
beampattern facilitates an auto scanning feature i.e. beam rotates through all range angle pairs
without the use of phase shifters. However, [46] proposed time dependent frequency offset
scheme to achieve a time-independent beampattern for a specific range-angle pair. The
beampattern is time-independent for only a specific location, thereby ensuring maximum signal
reflection from the specific point; rest of the beampattern however remains time- modulated. The
concept of frequency diversity has been utilized in many radar applications like high resolution
imaging of targets in SAR [47], [48], MIMO systems for multi target detection [49], [50] ground
moving target indication in forward-looking radar [51]. The progressive frequency offset has
further been categorized as small frequency offset and large frequency offset. Small frequency
offset has been exploited for beamforming application [52]-[54] while large frequency offset has
been utilized to achieve independent target echoes [55], [56]. FDA radar full-wave simulation
and implementation with linear frequency modulated continuous waveform were presented in
[57]. Recently FDA with non-uniform i.e. logarithmically increasing frequency offset has been
proposed [58], where beampattern with a single maximum at the target location is achieved. The

19
single-maximum beampattern improves SINR and detectability of the radar system as compared
to multiple maximum beampattern. The multi-path characteristics of FDA radar over a ground
plane were investigated and compared with phased-array in [59]. FDA radar full-wave
simulation and implementation with linear frequency modulated continuous waveform were
presented in [57], [60]. In [61], [62] FDA Cram´er-Rao lower bounds (CRLB) for estimating
direction, range and velocity have been analyzed. Generalized ambiguity function of FDA radar
has been formulated by Brady [63] and receiver for FDA radar has been proposed by Jones [64].
Most part of the literature deals with FDA in uniform linear arrays (ULA), even the recent
research concentrates on linear geometries [65]-[69]. However minimum attention has been put
towards other geometries like rectangular apertures.
2.5.1 LINEAR FREQUENCY DIVERSE ARRAYS.
The LFDA is quite unique in the sense that its beampattern is range-angle-selective, in contrast
to angle-selective pattern of a PAR. Furthermore, the beampattern is range, angle and time
modulated [52]. In order to explore the range, angle and time periodicity of LFDA, we have to
look into the array factor of LFDA. In linear FDA, a uniform frequency offset is applied across
the length of the array. For an N element array with d inter-element spacing and 𝑓0 being the
radar operating frequency, a progressive frequency shift of Δf is employed along the length of
the array, such that the frequency at the nth element is given by:
𝑓𝑛 = 𝑓0 + 𝑛∆𝑓 (2.8)
Taking the zeroth element as reference as shown in Fig.2.5, the path length difference between
the waves of nth element and reference element is given by:
𝑅𝑛= 𝑅𝑜 − 𝑛𝑑𝑠𝑖𝑛𝜃 (2.9)
Let the signal transmitted by nth element be expressed as:
𝑆𝑛(𝑡) = 𝑎𝑜(𝑡)𝑒𝑥𝑝{−𝑗2𝜋𝑓𝑛𝑡} (2.10)

20
Where 𝑎𝑜(t) is a complex weight representing propagation and transmission effects and is
neglected here i.e. 𝑎𝑜(t) =1. Overall signal arriving at far field point (𝑅0, 𝜃0) can be expressed as:
𝑆𝑇(𝑡) = ∑ 𝑒𝑥𝑝 {−𝑗2𝜋𝑓𝑛(𝑡 −𝑅𝑛
𝑐}𝑁−1
𝑛=0 (2.11)
Putting in the values of 𝑓𝑛 and 𝑅𝑛,
𝑆𝑇(𝑡) = ∑ 𝑒𝑥𝑝 {−𝑗2𝜋(𝑓0 + 𝑛∆𝑓) (𝑡 −(𝑅0−𝑛𝑑𝑠𝑖𝑛𝜃0)
𝑐)}𝑁−1
𝑛=0 (2.12)
Making plane wave assumption: 𝑅0>> (N-1) d and narrowband FDA assumption
(𝑁 − 1)∆𝑓 ≪ 𝑓𝑜 , the expression reduces to:
𝑆𝑇(𝑡) = exp [𝑗2𝜋𝑓𝑜 (𝑡 −𝑅0
𝑐)]∑ 𝑒𝑗𝑛𝜓𝑁−1
𝑛=0 (2.13)
Where
𝜓 = 2𝜋∆𝑓𝑡 +2𝜋𝑓𝑜
𝑐𝑑𝑠𝑖𝑛𝜃0 −
2𝜋∆𝑓𝑅0
𝑐 (2.14)
Arriving at closed form expression, array factor of the FDA is:
𝐴𝐹𝑛 =|sin𝑁𝜓
2⁄ |
|𝑠𝑖𝑛𝜓
2⁄ | (2.15)
The array factor will achieve a maximum value of N by equating the phase of field to 2m𝜋.
This leads to:
𝜓 = 2𝜋∆𝑓𝑡 +2𝜋𝑓𝑜
𝑐𝑑𝑠𝑖𝑛𝜃0 −
2𝜋∆𝑓
𝑐𝑅0= ±2𝑚𝜋 (2.16)
where 𝑚 = 0,1,2, ….

21
Fig.2.9 reveals a color-coded 3D beampattern of LFDA. The ‘s’ shaped maxima show that there
are infinite (𝑅, 𝜃) pairs of maximum field at a fixed time. Thus Eq. (2.13) reveals that
beampattern has multiple peaks in angle 𝜃 , range R, and time t; thus the beampattern drifts with
time and space. Each maximum (𝑅, 𝜃) location doesn’t stay illuminated for the entire pulse
duration i.e. an object placed at a specific location experiences the beampattern maxima and
minima periodically. This is in contrast to PAR in which an object receives a constant energy
from the radar.
Of these three parameters, one can observe the modulation in one parameter by keeping the
remaining two fixed. For example, by keeping the range and angle fixed, time modulation can be
clearly witnessed. Fig.2.10 shows periodicity of beam in time.
Fig 2.9: Beampattern of linear frequency diverse array. (N=10, d=λ/2, ∆f=1kHz)

22
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
Time (ms)
Norm
aliz
ed F
ield
inte
nsity
Fig 2.10 : Variation of field intensity with respect to time in LFDA. (N=10, d=λ/2, ∆f=1kHz, R
=3km, Ɵ = 𝟐𝟎° )
0 100 200 300 400 5000
0.2
0.4
0.6
0.8
1
Range (km)
Norm
alized F
ield
inte
nsity
Fig 2.11: Variation of field intensity with respect to range in LFDA. (N=10, d=λ/2, ∆f=1kHz,
t=0.3msec, Ɵ = 𝟐𝟎° )

23
Periodicity of beampattern in time is 1
∆𝑓., null to null beamwidth is
2
𝑁∆𝑓. Similarly, Fig. 2.11
shows the modulation of beampattern in range. Periodicity of beampattern in range is 𝑐
∆𝑓, null to
null beamwidth is 2𝑐
𝑁∆𝑓. Fig.2.12 demonstrates modulation of beampattern in angle. Periodicity
of beampattern in angle is 4𝜋
𝑁𝑘𝑑, null to null beamwidth is
2𝜋
𝑘𝑑.
2.5.2 PLANAR FREQUENCY DIVERSE ARRAYS.
Since LFDA radar, focusses energy in two dimensions i.e. range and elevation, the directionality
of the beampattern does not satisfy the demand of practical applications [70]. Planar arrays are
more commonly used in practical radar applications because of their several benefits, most
common of them being high directivity and improved gain. [64] performed the pioneering work
in PFDA by deriving the array factor of and also proposing receiver architectures for PFDA. [70]
analyzed the auto scanning ability of beampattern of PFDA, i.e. beam scanning in time. In the
next section we discuss the fundamentals of PFDA.
-1 -0.5 0 0.5 10
0.2
0.4
0.6
0.8
1
sin
Nor
mal
ized
Fie
ld in
tens
ity
Fig 2.12: Variation of field intensity with respect to 𝒔𝒊𝒏𝜽 in LFDA. (N=10, d=λ/2, ∆f=1kHz,
t=0.3 msec, R =3km)

24
2.5.3 ARRAY FACTOR OF PFDA
Consider, a planar array of M x N identical, isotropic elements, where the elements are uniformly
spaced and oriented in the x and y axes respectively, as depicted in Fig.2.13. 𝑑𝑥 is inter element
spacing along x direction and 𝑑𝑦 is the inter element spacing along y direction. Radar working
frequency is fo, with ∆𝑓𝑥 and ∆𝑓𝑦 being the incremental frequency offsets along the elements in
x and y directions, respectively. m and n be the element indices along x and y axes respectively
such that
m = 0,1,2,…..M-1
n = 0,1,2….N-1
Let the signal transmitted by mn th element is expressed as:
Fig 2.13: Geometry of Planar frequency diverse array.

25
𝑆𝑚𝑛(𝑡) = 𝑎𝑚𝑛(𝑡)𝑒𝑥𝑝{−𝑗2𝜋𝑓𝑚𝑛𝑡} (2.17)
Where
𝑎𝑚𝑛(t) is a complex baseband envelope and is neglected here i.e. 𝑎𝑚𝑛(t) =1.
𝑓𝑚𝑛 = 𝑓0 + 𝑚∆𝑓𝑥 + 𝑛∆𝑓𝑦 (2.18)
If the origin is considered as the reference point, then by making far field assumption, the
distance between mnth element and point of observation
(𝑅0, 𝜃0, 𝜑0) is given by
𝑅𝑚𝑛 ≅ (𝑅0 − 𝑛𝑑𝑥𝑠𝑖𝑛𝜃0𝑐𝑜𝑠𝜑0 − 𝑚𝑑𝑦𝑠𝑖𝑛𝜃0𝑠𝑖𝑛𝜑0) (2.19)
Substituting expressions of 𝑓𝑚𝑛 and 𝑅𝑚𝑛 in Eq. 2.17, we get
𝑆𝑚𝑛(𝑡) = exp {−j2π(𝑓0 + 𝑚∆𝑓𝑥 + 𝑛∆𝑓𝑦)(𝑡 −((𝑅0−𝑛𝑑𝑥𝑠𝑖𝑛𝜃0𝑐𝑜𝑠𝜑0− 𝑚𝑑𝑦𝑠𝑖𝑛𝜃0𝑠𝑖𝑛𝜑0))
c}
(2.20)
Overall signal arriving at point of observation, due to 𝑀 × 𝑁 array is given by
𝑆T(𝑡) = ∑ ∑ exp {−j2π(𝑓0 + 𝑚∆𝑓𝑥 + 𝑛∆𝑓𝑦)(𝑡 −((𝑅0−𝑛𝑑𝑥𝑠𝑖𝑛𝜃0𝑐𝑜𝑠𝜑0− 𝑚𝑑𝑦𝑠𝑖𝑛𝜃0𝑠𝑖𝑛𝜑0))
c}𝑁−1
𝑛=0𝑀−1𝑚=0
(2.21)
Making narrowband FDA assumption i.e. (𝑁 − 1)∆𝑓 ≪ 𝑓0 ,and (𝑀 − 1)∆𝑓 ≪ 𝑓0, the
expression reduces to:
𝑆T(𝑡) = exp [j2π𝑓0 (𝑡 −𝑅0
𝑐)]∑ exp [j2π𝑚{𝑀−1
𝑚=0 ∆𝑓𝑥 (𝑡 −𝑅0
𝑐) +
𝑑𝑥
𝑐 𝑠𝑖𝑛𝜃0𝑐𝑜𝑠𝜑0}] ×
∑ exp [j2π𝑛{𝑁−1𝑛=0 ∆𝑓𝑦 (𝑡 −
𝑅0
𝑐) +
𝑑𝑦
𝑐 𝑠𝑖𝑛𝜃0𝑠𝑖𝑛𝜑0} ] (2.22)

26
Or in closed form;
𝑆𝑇(𝑡; 𝑅, 𝜃, 𝜑) = {sin (
𝑀𝛷𝑥2⁄ )
sin (𝛷𝑥
2⁄ )} × {
sin (𝑁𝛷𝑦)⁄2)
sin (𝛷𝑦
2⁄ )
} (2.23)
Where
𝛷𝑥 = ∆𝑓𝑥 (𝑡 −𝑅0
𝑐) +
𝑑𝑥
𝑐 𝑠𝑖𝑛𝜃0𝑐𝑜𝑠𝜑0 (2.24)
𝛷𝑦 = ∆𝑓𝑦 (𝑡 −𝑅0
𝑐) +
𝑑𝑦
𝑐 𝑠𝑖𝑛𝜃0𝑠𝑖𝑛𝜑0 .
c=speed of light.
Eq. (2.23) can be considered as array factor of PFDA. The beampattern of PFDA is quite
different from that of LFDA. In contrast to infinite maximum (𝑅, 𝜃) pairs, there are few,
localized maxima. Secondly the beampattern is a 3D beampattern i.e. beam scans in range,
elevation and azimuth. However, the beampattern is periodic in range, time, and angle just like
LFDA. Thus range and angle dependent interferers can be suppressed more efficiently in PFDA.
Hence we can say that PFDA increases the degree of freedom in space domain [70].

27
(a)
Fig 2.14: (a) Range-elevation profile of PFDA. (b) Range-azimuth
profile of PFDA. (N=8, M=8, dx=dy=λ/2 , ∆fx=∆fy=1 kHz )

28
Chapter 3
COGNITIVE NULL STEERING IN
LINEAR FREQUENCY DIVERSE
ARRAY RADARS
3.1 INTRODUCTION
In this chapter a novel concept of cognitive null steering technique has been developed using
FDA. The concept is elaborated using a block diagram. Every block of the flow diagram has
been explained in detail. In transmitter processing unit, the formulation for null steering using
frequency offset selection is developed. The receiver processing unit not only estimates the
direction of arrival of the interferer but also predicts the next possible location with the result that
the system is able to maintain the null at the interferer location. Detailed working of DOA
estimator and predictor has also been presented. Finally, simulation results verify the validity of
the proposed approach.
Null Steering in radars and communications for interference cancellation [71], and multi-path
mitigation has been a focus of research for decades [72]. In literature various null steering
techniques have been deployed so far in PAR systems [68]-[76]. As described previously that
when it comes to localization of signal sources, PAR systems are limited to provide only angle
localization. This limits the performance of PAR system to mitigate undesirable range-dependent
interferences. Moreover, if we want to focus the transmit energy in the directions with different
ranges, multiple antennas or a multi beam antenna should be employed [77]. Above all the phase
shifters used for beam and null steering are very expensive amounting to almost half the budget.
The ‘range-angle’ dependent beampattern of frequency diverse array (FDA) localizes the targets

29
in two dimensions i.e. in terms of slant ranges and elevation angles and therefore provides
potential solution to suppress range-angle dependent clutter and interference [42].
Cognition, a phenomenon beyond ‘adaptivity’ [78], on part of a radar system encompasses three
basic capabilities [79].
Firstly, continuous and intelligent interaction of the transmitter and receiver with the
environment.
Secondly, a closed feedback loop between transmitter, receiver and environment.
Thirdly, memory system that preserves the information received in the form of radar returns.
In the proposed system, a single point target and single point interference source in a clutter free
environment has been assumed. Both the target and interference source are non-stationary. The
main objective of the cognitive radar system is to place and maintain the deepest null of the
pattern at the location of the interferer. Since a frequency offset selection based null steering
scheme is presented, the target could be illuminated by any level of radiation (which may or may
not be a maximum). It has been assumed that system has a prior knowledge of signal source
classification as an interferer. Some of the modern target classification techniques have been
listed in [80], [81]. The proposed null steering technique localizes the null at the interference not
only in angle but also in range, and hence outsmarts other existing null steering techniques in
PAR. Moreover, the lengthy iterative method based techniques like recursive least squares
(RLS), least mean square (LMS), minimum variance distortion-less response (MVDR) etc., have
been replaced by a simple and fast frequency offset selection based scheme. Above all, the
element of cognition in the proposed methodology makes it best suited for practical radar
environments, where the sources are non-stationary requiring prediction of next location. The
proposed scheme is suitable for the future needs of surveillance radar systems, where the system
has to make decisions of interest on possible target and unwanted sources, cognitively. The
proposed system can find its utility both in military as well as civil surveillance radar systems
that support air traffic control.

30
3.2 SYSTEM MODEL
Complete flow chart of the proposed system model is shown in the block diagram of Fig. 3.1.
The proposed cognitive radar system has an FDA transmitter and a conventional PAR receiver.
The transmitter selects the desired frequency offset cognitively, based on the feedback
information provided by the receiver, such that the deepest null of the pattern is placed at
interference source. The signal processing unit at the receiver localizes the interference source,
described by (range, elevation angle) tuple i.e. (𝑅, 𝜃). Direction of arrival (DOA) is estimated
using MUSIC algorithm which is well-known for its precision and high resolution capability.
However, range estimation is carried out by conventional propagation delay technique.
Knowledge obtained from previous illuminations is arranged in a time series manner and fed into
‘one step ahead neural network predictor’ to predict the next location i.e. (𝑅, 𝜃) of interference
source. This information is fed back to the transmitter processing unit, where the selector unit
again cognitively selects the required frequency offset and precisely places the null at the
estimated position of interference source, thus promising effective interference suppression. In
this way the cognitive loop keeps on estimating, predicting the interference source location and
succeeds in maintaining a deep null at the desired location. This interference mitigation
obviously enhances SINR of the system.
Block diagram in Fig. 3.1, consists of three parts, the radar environment, transmitter processing
unit and receiver processing unit. Each part is described in detail in the next sections.
3.2.1 TRANSMITTER PROCESSING UNIT.
The transmitter processing unit consists of an N element FDA and a frequency offset selector.
3.2.1.1 FDA Transmitted Signal Model.
Transmitter consists of an N element array with d inter-element spacing as shown in Fig. 3.2.
With 𝑓0 being the radar operating frequency, a progressive frequency shift of Δf is employed
along the length of the array, such that the frequency at the nth element is given by:

31
𝑓𝑛 = 𝑓0 + 𝑛∆𝑓 (3.1)
Taking the zeroth element as reference as shown in Fig. 3.2, the path length difference between
the waves of nth element and reference element is given by:
𝑅𝑛= 𝑅𝑜 − 𝑛𝑑𝑠𝑖𝑛𝜃 (3.2)
Fig 3.1: Block Diagram of FDA radar for cognitive null steering.

32
Let the signal transmitted by nth element be expressed as:
𝑆𝑛(𝑡) = 𝑎𝑜(𝑡)𝑒𝑥𝑝{−𝑗2𝜋𝑓𝑛𝑡} for 0 ≤ 𝑡 ≤ 𝑇 (3.3)
Where T is the pulse duration and 𝑎𝑜(t) is a complex weight representing propagation and
transmission effects and is neglected here i.e. 𝑎𝑜(t) =1. Overall signal arriving at far field point
(𝑅0, 𝜃0) can be expressed as:
𝑆𝑇(𝑡) = ∑ 𝑒𝑥𝑝 {−𝑗2𝜋𝑓𝑛(𝑡 −𝑅𝑛
𝑐}𝑁−1
𝑛=0 (3.4)
Putting in the values of 𝑓𝑛 and 𝑅𝑛,
𝑆𝑇(𝑡) = ∑ 𝑒𝑥𝑝 {−𝑗2𝜋(𝑓0 + 𝑛∆𝑓) (𝑡 −(𝑅0−𝑛𝑑𝑠𝑖𝑛𝜃0)
𝑐)}𝑁−1
𝑛=0 (3.5)
Making plane wave assumption: 𝑅0>> (N-1)d and narrowband FDA assumption
(𝑁 − 1)∆𝑓 ≪ 𝑓𝑜 , the expression reduces to:
Fig 3.2: FDA transmitter.

33
𝑆𝑇(𝑡) = exp [𝑗2𝜋𝑓𝑜 (𝑡 −𝑅0
𝑐)]∑ 𝑒𝑗𝑛𝜓𝑁−1
𝑛=0 (3.6)
Where
𝜓 = 2𝜋∆𝑓𝑡 +2𝜋𝑓𝑜
𝑐𝑑𝑠𝑖𝑛𝜃 −
2𝜋∆𝑓𝑅0
𝑐 (3.7)
Arriving at closed form expression, array factor of the FDA is:
𝐴𝐹𝑛 =|sin𝑁𝜓
2⁄ |
|𝑠𝑖𝑛𝜓
2⁄ | (3.8)
3.2.1.2 Frequency offset selector:
In [52], the propagation time of peak signal from transmit array to a target at some point is
found by equating the phase of field to 2m𝜋. But in order to create nulls, 𝐴𝐹𝑛 = 0 or
equivalently
sin (𝑁𝜓
2⁄ ) = 0 (3.9)
This leads to:
𝜓 = 2𝜋∆𝑓𝑡 +2𝜋𝑓𝑜
𝑐𝑑𝑠𝑖𝑛𝜃 −
2𝜋∆𝑓
𝑐𝑅0=
±2𝑛𝜋
𝑁 for N> n > -N (3.10)
Thus for the location of interferer at (𝑅𝑖−1,𝜃𝑖−1), the time of propagation of null of the field
pattern from the transmit array to the interferer location, can be calculated by Eq. (3.10) as:
𝑡𝑖−1 =𝑅𝑖−1
𝑐+
1
∆𝑓𝑖−1(𝑛
𝑁−
𝑑
𝜆𝑜𝑠𝑖𝑛𝜃𝑖−1) (3.11)
Similarly, for the location of interferer at (𝑅𝑖,𝜃𝑖), time of propagation of field null from the
transmit array to the interferer location is given by:
𝑡𝑖 =𝑅𝑖
𝑐+
1
∆𝑓𝑖(𝑛
𝑁−
𝑑
𝜆𝑜𝑠𝑖𝑛𝜃𝑖) (3.12)

34
Now from above expressions it is clear that time of propagation of null of the field pattern from
the transmit array to the interferer location depends upon corresponding offset Δf. So if we
equate time of null propagation from the transmit array to the interferer location, at instants i and
i-1 i.e.
𝑡𝑖−1 = 𝑡𝑖 (3.13)
Then we can calculate the required frequency offset ∆𝑓𝑖, which when applied in a progressive
incremental fashion to the FDA, places null at desired location (𝑅𝑖,𝜃𝑖). Its value in terms of
previous ∆𝑓𝑖−1 and other relevant parameters is given as follows.
∆𝑓𝑖 =
𝑛
𝑁−
𝑑
𝜆𝑜sin𝜃𝑖
(𝑅𝑖−1
𝑐−
𝑅𝑖𝑐)+
1
∆𝑓𝑖−1(𝑛
𝑁−
𝑑
𝜆𝑜sin𝜃𝑖−1)
(3.14)
3.2.2 RADAR ENVIRONMENT.
Fig. 3.3 depicts the assumed trajectory of the interferer in the far field. As mentioned earlier the
radar environment has a non-stationary target and a non-stationary interference source. Since the
proposed scheme estimates, predicts and maintains deepest nulls at the interference source, only
trajectory of the interference source is considered.
Fig 3.3: Range angle plot of the assumed trajectory.

35
3.2.3 RECEIVER PROCESSING UNIT.
Receiver array is a conventional phased array of M elements, such that M=N, with inter element
spacing d. The processing unit has two main parts. DOA estimator and neural network predictor
for the next location (𝑅, 𝜃).
3.2.3.1 DOA Estimator.
DOA encompasses, Angle(𝜃) and Range (R) estimation.
MUSIC (Multiple Signal Classification) algorithm has been used for angle of arrival estimation.
The MUSIC algorithm is counted amongst super resolution DOA estimation techniques as it can
resolve multiple signals simultaneously with much lesser computational time [82].
Receiver Signal Model.
Consider a general uniform linear phased array configuration of M elements with d inter element
spacing. Let 𝜃𝑖 be the angle of the source to be detected, with range 𝑅𝑖, as measured from
reference element, i.e. first element in our case. The signal received by first element is:
𝑟(𝑡) = 𝑆𝑇 (𝑡 −𝑅𝑖
𝑐) (3.15)
Similarly signal received by 2nd element
𝑟′(𝑡) = 𝑆𝑇 (𝑡 −𝑅𝑖
𝑐) exp (𝑗2𝜋
𝑓0
𝑐𝑑𝑠𝑖𝑛𝜃𝑖) (3.16)
where the additional phase is introduced due to the path length difference between the two
elements. Thus the input signal vector at the receiver array:
𝐱(𝑡) = 𝑟(𝑡) 𝒂(𝛷) + 𝒏(𝑡) (3.17)

36
Where 𝒂(𝛷) = [
exp (−𝑗2𝜋𝑓0
𝑐𝑑𝑠𝑖𝑛𝜃𝑖)
⋮
exp (−𝑗𝑀2𝜋𝑓0
𝑐𝑑𝑠𝑖𝑛𝜃𝑖)
] is the steering vector and 𝒏(𝑡) = [𝑛1(𝑡)
⋮𝑛𝑀(𝑡)
] is white
Gaussian noise vector with zero mean and variance σn2.
For L signals arriving at this array, the output of the array is the linear combination of L incident
waveforms.
𝐔 = 𝐀𝒓(𝑡) + 𝐧(t) (3.18)
Where 𝒓𝑇(𝑡) = [𝑟1(𝑡) 𝑟2(𝑡) ………𝑟𝐿(𝑡)] and A is M×L array steering matrix of the form
A=[
exp (−𝑗2𝜋𝑓0
𝑐𝑑𝑠𝑖𝑛𝜃1)
⋮
exp (−𝑗𝑀2𝜋𝑓0
𝑐𝑑𝑠𝑖𝑛𝜃1)
exp (−𝑗2𝜋𝑓0
𝑐𝑑𝑠𝑖𝑛𝜃2)
⋮
exp (−𝑗𝑀2𝜋𝑓0
𝑐𝑑𝑠𝑖𝑛𝜃2)
…… .
exp (−𝑗2𝜋𝑓0
𝑐𝑑𝑠𝑖𝑛𝜃𝐿)
⋮
exp (−𝑗𝑀2𝜋𝑓0
𝑐𝑑𝑠𝑖𝑛𝜃𝐿)
] (3.19)
Input covariance matrix is given as
𝐑𝑢 = 𝐀𝐑𝑟𝐀H + σn
2𝐈 (3.20)
If 𝜆1 ≥ 𝜆2 ≥ 𝜆3 ……… . 𝜆𝑀 be eigen values of 𝐑𝑢, 𝒒1, 𝒒2, 𝒒3 ……… . 𝒒𝑀 be eigen vectors of 𝐑𝑢 ,
𝑣1 ≥ 𝑣2 ≥ 𝑣3 ……… . 𝑣𝐿 be eigen values of 𝐀𝐑𝑟𝐀H, then
𝜆𝑖 = {𝑣𝑖 + 𝜎𝑛
2 𝑖 = 1,2, …… . . 𝐿
𝜎𝑛2 𝑖 = 𝐿 + 1, , …… . .𝑀
(3.21)
The eigen vector associated with a particular eigen value, is the vector such that,
(𝐑𝑢 − 𝜆𝑖𝐼)𝑞𝑖 = 0 (3.22)
For eigen vectors associated with smallest eigen values, we have
𝐀𝐑𝑟𝐀H𝒒𝑖 = 0 (3.23)

37
Since A has full rank and 𝐑𝐫 is non-singular, this shows that 𝐀H𝒒𝑖 = 0 or equivalently
𝑎𝑘𝐻(𝛷)𝑞𝑖 = 0 𝑖 = 𝐿 + 1,……𝑀 𝑎𝑛𝑑 𝑘 = 1,……𝐿 (3.24)
This means that Eigen vectors associated with the M-L smallest Eigen values are orthogonal to
the steering vectors that make up A. Thus by finding the steering vectors orthogonal to the Eigen
vectors associated with the Eigen values of 𝐑𝑢, one can estimate the steering vectors of received
signals.
Range Estimation. Range is calculated by the conventional propagation delay method. As
calculated in Eq. (3.12), null takes 𝑡𝑖 time to reach the interference source at location (𝑅𝑖,𝜃𝑖).
Now from the interference source to the receiver time taken is 𝑅𝑖
𝑐 . So the total delay between the
wave departure from transmitter to the arrival at the receiver is given by 𝑇𝑖 i.e. 𝑇𝑖 = 𝑡𝑖 +𝑅𝑖
𝑐 ,
where:
𝑇𝑖 =2𝑅𝑖
𝑐+
1
∆𝑓𝑖(𝑛
𝑁−
𝑑
𝜆𝑜𝑠𝑖𝑛𝜃𝑖) (3.25)
The range 𝑅𝑖 can be calculated as:
𝑅𝑖 =𝑐
2(𝑇𝑖 −
1
∆𝑓𝑖(𝑛
𝑁−
𝑑
𝜆𝑜𝑠𝑖𝑛𝜃𝑖) (3.26)
3.2.3.2 Neural Network Predictor.
Once the interference source is localized, the next step is predictor. Prediction is claiming future
value of a function depending upon past values. When dealing with predictions in real time, it is
necessary that the technique used for the prediction of next outcome should neither be too
complex nor such time consuming that the predicted event occurs before the prediction. We have
employed, for the prediction of location (𝑅𝑖,𝜃𝑖), neural networks (NN) as a time series predictor.

38
NN are a good choice for prediction for two basic reasons. They behave as a nonlinear and
nonparametric approach to approximate any continuous function to high degree of accuracy [83].
Secondly they are simpler to implement and outsmart other prediction techniques when the
functional relationship between independent and dependent variables are unknown [84] .Unlike
the Extended Kalman filters (EKF) implementation, NN do not require a model of the system
[85].
In the beginning of set up, consecutive interference source locations are noted down and
arranged in a form of time series sequence of ‘range’ and ‘angle’ independently. This input
sequence is given to NN which then adjusts its weights and trains itself to give a best fit until the
performance criterion is met. The network takes in previous input and output values and
continues to give required step ahead prediction by keeping the performance criterion as a
constraint and keeps on readjusting its weight in case of errors between the actual outcomes and
its estimates. In our case, we have used MATLAB neural network time series toolbox. The
model employed is non-linear autoregressive with exogenous inputs (NARX). The NARX model
describes any nonlinear model very conveniently [86], where nonlinear mapping is generally
approximated by a standard multilayer perceptron (MLP) network [87]. Fig. 3.4 explains the
architecture and working of NARX model.
Fig 3.4: Block diagram of NARX model.

39
The standard NARX is a two-layer feed forward network. The hidden layer uses sigmoid
function as transfer function while output layer uses a linear transfer function. NARX time series
predictor predicts y(t+1), i.e.
𝑦(𝑡 + 1) = 𝑓[𝑢(𝑡), 𝑢(𝑡 − 1), ……𝑢(𝑡 − 𝑝𝑢), 𝑦(𝑡), 𝑦(𝑡 − 1), … . . 𝑦(𝑡 − 𝑝𝑦)] (3.27)
where
u(t) and y(t) are input and output of the systems respectively. 𝑝𝑢 ≥ 1 𝑎𝑛𝑑 𝑝𝑦 ≥ 1 are the input
and output orders. Let x denote the system input vector with dimension𝑝 = 𝑝𝑢 + 𝑝𝑦, such that
𝒙 = [𝑢(𝑡), 𝑢(𝑡 − 1), ……𝑢(𝑡 − 𝑝𝑢), 𝑦(𝑡), 𝑦(𝑡 − 1), … . . 𝑦(𝑡 − 𝑝𝑦)]𝑇 (3.28)
f is a nonlinear function approximated by the following regression model.
𝑦(𝑡 + 1) = ∑ 𝑎(𝑖)𝑢(𝑡 − 𝑖) + ∑ 𝑏(𝑗)𝑦(𝑡 − 𝑗)𝑝𝑦
𝑗=1+ ∑ ∑ 𝑎(𝑖, 𝑗)𝑢(𝑡 − 𝑖)𝑢(𝑡 − 𝑗)
𝑝𝑢𝑗=𝑖
𝑝𝑢𝑖=1
𝑝𝑢𝑖=1 +
∑ ∑ 𝑏(𝑖, 𝑗)𝑦(𝑡 − 𝑖)𝑦(𝑡 − 𝑗)𝑝𝑦
𝑗=𝑖
𝑝𝑦
𝑖=1+ ∑ ∑ 𝑐(𝑖, 𝑗)𝑢(𝑡 − 𝑖)𝑦(𝑡 − 𝑗)
𝑝𝑦
𝑗=𝑖𝑝𝑢𝑖=1 (3.29)
where
a(i) and a(i, j) represent the linear and non-linear exogenous coefficients.
b(i) and b(i, j) represent the linear and non-linear autoregressive coefficients.
c(i, j) represent the nonlinear cross terms coefficients.
For storing past values of the u(t) and y(t) sequences, NARX uses tapped delay lines.
Performance criterion is MSE which is defined as the squared difference between actual and
estimated outcome. This is the most common criterion of estimators and is given by:
|𝑀𝑆𝐸| = |𝐴𝑐𝑡𝑢𝑎𝑙 − 𝐸𝑠𝑡𝑖𝑚𝑎𝑡𝑒𝑑|2 (3.30)

40
3.3 SIMULATIONS AND RESULTS.
In this section the simulation results of proposed system are presented. It is assumed that the
transmitter and receiver arrays are of 10 elements each, with uniform spacing of half wavelength.
The operating frequency selected is 10 GHz.
3.3.1 NN PREDICTOR RESULTS:
Time series sequences of successive range and angle locations of interference sources are loaded
into NN time series tool in MATLAB. NARX Model is selected. Number of hidden neurons is
set to 8 and number of tapped delay lines is 4. Default Levenberg-Marquardt back propagation
algorithm is used for training the network. System performance criterion is MSE. The input
autocorrelation curve for range and angle time series prediction are shown in Fig. 3.5(a) and Fig.
3.5(b) respectively. It relates prediction errors in time. Value of autocorrelation function at zero
lag is basically representing MSE, which is 0.01 and 0.02 for range and angle prediction
respectively. Secondly all the other correlations are within the tolerance boundary, so the system
is performing adequately.

41
Fig 3.5: Input autocorrelation curve for (a) Range time series prediction. (b) Angle time series prediction.
(a)
-20 -15 -10 -5 0 5 10 15 20
-2
0
2
4
6
8
10
12
14x 10
-3 Autocorrelation of Error 1
Co
rrela
tio
n
Lag
Correlations
Zero Correlation
Confidence Limit
-20 -15 -10 -5 0 5 10 15 20
0
5
10
15
20
x 10-3 Autocorrelation of Error 1
Co
rrelatio
n
Lag
Correlations
Zero Correlation
Confidence Limit
(b)

42
Fig 3.6: Validation performance for (a) Range time series prediction. (b) Angle time series
prediction.
(a)
0 5 10 15 2010
-2
10-1
100
101
102
Best Validation Performance is 0.01894 at epoch 14
Me
an
Sq
ua
re
d E
rro
r (m
se
)
20 Epochs
Train
Validation
Test
Best
0 10 20 30 40 50
10-2
100
102
Best Validation Performance is 0.020338 at epoch 52
Me
an
Sq
ua
re
d E
rro
r (m
se
)
58 Epochs
Train
Validation
Test
Best
(b)

43
Performance plots are shown in Fig. 3.6(a) and Fig. 3.6(b) for range and angle time series
prediction respectively. These plots shows that all errors (testing, validation and training) are
decreasing until best validation is met and so there is no over fitting i.e. errors are continuously
being reduced with every iteration and predicted values are getting closer to the original values.
Thus the NN is predicting next location of the interferer more and more precisely.
Prediction plots are shown in Fig. 3.7(a) and Fig. 3.7(b) for range and angle time series
respectively. This plot shows the prediction performance of NARX predictor.
Fig 3.7: Prediction performance plots (a) for range time series (b) angle time series.
0 20 40 60 80 100 120 1402
2.5
3
3.5
4
4.5
5
Time Samples
Range (
km
)
orignal
predicted
0 20 40 60 80 100 120 140-60
-40
-20
0
20
40
Time Samples
Angle
(degre
es)
orignal
predicted
. (a) (b)

44
3.3.2 NULL STEERING RESULTS:
For simulation purpose, we have considered a 10 GHz FDA, consisting of 10 elements with 𝜆 2⁄
inter-element spacing and an initial frequency offset of 10 kHz. As can be inferred from Fig. 3.4,
few locations of the interference source are given below. In Table 3.1, for every location, the
frequency offset so obtained from Eq. 3.14 has also been mentioned.
Table 3.1: Locations of the interference source and the frequency offsets so obtained.
Location
Number
𝑅𝑖(km) 𝜃𝑖(deg) ∆𝑓𝑖 (𝑘𝐻𝑧)
Location 1 3 −49° 10.15
Location 2 4 −40° 10.47
Location 3 2.5 −20° 19.49
Location 4 2.8 0° 21.82
Location 5 4.5 10° -28.71
Location 6 5 20° -19.94
Fig. 3.8 (a) shows nulls of beampattern in angle keeping range fixed, while Fig. 3.8(b) shows
null placement in range keeping angle fixed. Sharp nulls of the order -300 dB in all the cases
validate the proposed methodology and also show the versatility of the proposed formulation,
which can cast nulls at any combination of (𝑅, 𝜃). Due to the periodic nature of FDA
beampattern, one can notice periodic nulls at different (𝑅, 𝜃) pairs. However, deepest nulls
appear only at the specified locations of the interferer as obtained by the proposed methodology.

45
-100 -50 0 50 100-300
-250
-200
-150
-100
-50
0
50
Elevation angle (°)
Fie
ld in
ten
sity
(d
B)
Nulls in elevation
location1
location2
location3
location4
location5
location6
(a)
0 1 2 3 4 5 6-350
-300
-250
-200
-150
-100
-50
0
50
Range (km)
Fie
ld in
ten
sity
(d
B)
Nulls in Range
location1
location2
location3
location4
location5
location6
(b)
Fig 3.8: For LFDA with N=10, d =0.5λ, (a) Field versus angle with time and range fixed. (b)
Field versus range with time and angle fixed

46
In order to present a clear view of the nulls, position of the interferer with coordinates
(3km, −49°) is considered. In Fig. 3.9(a), clear nulls at locations other than the desired locations
can be witnessed, of the order -40 to -50 dB. Periodicity of the null in LFDA beampattern
is 𝑐 𝑁∆𝑓⁄ , as deduced from Eq.3.10. For ∆𝑓 of 10.15 kHz and 10 element array, nulls are
repeated every 3km. This can be verified from the Fig 3.9(a). So not only other nulls are
appearing but are also periodic. In Fig. 3.9(b) 3D absolute field representation also verifies nulls
at other range-angle pairs, as shown by the data tips.
Fig 3.10 (a-f) shows 3D range angle dependent beampatterns for null placement at all the six
selected locations of the interferer. For the purpose of clarity, absolute values of the field are
plotted which show sharp nulls with extremely low values.
(a) (b)
Fig 3.9 : For LFDA with N=10, d =0.5λ, Periodicity of nulls (a) 2D representation
(b) 3D representation.

47
(a) (b)
(c) (d)
(e) (f)
Fig 3.10: For LFDA with N=10, d =0.5λ, Range angle beampattern with proposed offset for (a)
(−49°, 3𝑘𝑚), (b) (−40°, 4𝑘𝑚), (c) (−20°, 2.5𝑘𝑚), (d) (0°, 2.8𝑘𝑚), (e) (10°, 4.5𝑘𝑚), (f)
(20°, 5𝑘𝑚).

48
Chapter 4
FREQUENCY OFFSET SELECTION
BASED ADAPTIVE 3D
BEAMFORMING IN PLANAR FDA
RADARS.
4.1 INTRODUCTION
In this chapter a new and simple approach to 3D transmit adaptive beamforming (ABF) in PFDA
using frequency offset selection scheme (FOSS) has been proposed. Considering a single target
and a single interference source in a clutter free environment the proposed frequency offset
selection scheme beam steers at the aim point and at the same time offers null steering to
mitigate undesired interference. Thus as per this capability, the proposed methodology is claimed
to be adaptive. The chapter further presents array signal processing model of the proposed
beamformer, followed by SINR analysis. Moreover, the chapter compares the beamforming
capability of the proposed method, not only with published work in PFDA as [64], but also with
a robust minimum variance distortion-less response (MVDR) beamformer technique in PFDAs
(although it has also not been published in the literature to the best of our knowledge).
Comparisons are made in terms of beamforming capability, null depths and SINR performance,
which give a quantified proof of the superiority of the proposed method.
In complex electromagnetic environments, the presence of unwanted interfering signals,
electronic countermeasures, clutter returns etc. severely degrade the SINR of the system.

49
Adaptive beamforming focuses maximum gain at the aim point while countering the jamming
threats or other unwanted interferences by significantly nullifying power from the undesired
directions [8]. Main difference between adaptive and conventional beamforming (CBF) is that,
ABF can focus null in the interference direction while CBF cannot [21]. Several adaptive
beamforming techniques, both for linear and planar geometries, already exist in the literature for
PAR [88]. However, as mentioned previously, PAR beampattern is only angle dependent;
therefore it cannot suppress range dependent interferences. ABF has also been proposed for FDA
but it has been solely analyzed in linear geometries i.e. LFDA. In the previous chapter frequency
offset selection based null steering in LFDA has been proposed. Similarly, [89] proposed
cognitive beam steering in LFDA using frequency offset calculation. However, the beam steering
achieved is 2D i.e. the target is localized in range and elevation only. Thus ABF in 3D i.e. range
R, elevation 𝜃 and azimuth angle 𝜑, has not been established so far, especially in planar
frequency diverse array (PFDA). Planar FDA geometries have been investigated in [64] which
propose a conventional transmit beamforming that steers the beam only at target location by
applying beamforming weights. Since system anti-jam and interference cancellation performance
has become an essential requirement for the military and high resolution radars, adaptive
beamforming is incomplete without encountering unwanted sources i.e. null steering. The PFDA
outsmarts LFDA, in the sense that it offers 3D beam steer which is not possible with planar PAR
even. Secondly the generated beampattern comprises of a few periodic sharp localized maxima,
unlike ‘s’ shaped patterns in LFDA that consist of infinite (𝑅, 𝜃) points of maximum field. Thus
PFDA can offer better range angle dependent interference suppression than LFDA.
The proposed system is basically a transmit beamforming scheme which results in maximum
reflections from the target and suppressed reflections from the interferer, at the receiver input,
unlike conventional and MVDR beamformers, where the reflections from the unwanted sources
are never guaranteed to be nullified at the receiver input. Thus the proposed scheme results in an
improved SINR of the system. In addition to this, the proposed formulation is very fast and
imposes least computation load as it bypasses use of phase shifters and lengthy iterative methods
of other ABF techniques, where beampattern is shaped by means of weights, adaptive algorithms
and optimization criteria.

50
4.2 PRELIMINARIES AND GEOMETRY.
Consider, a planar array of M x N identical, isotropic elements, where the elements are uniformly
spaced and oriented along the x, y axes respectively, as depicted in Fig. 4.1. 𝑑𝑥 and 𝑑𝑦 is the
inter element spacing along x and y directions respectively. Radar working frequency is 𝑓0, with
∆𝑓𝑥 and ∆𝑓𝑦 being the incremental frequency offsets along the elements in x and y directions,
respectively. Array factor of PFDA as derived in Eq (2.23) is given as:
𝐴𝐹 = {sin (
𝑀𝛷𝑥2⁄ )
sin (𝛷𝑥
2⁄ )} × {
sin (𝑁𝛷𝑦)⁄2)
sin (𝛷𝑦
2⁄ )
} (4.1)
Where: 𝛷𝑥 = ∆𝜔𝑥 (𝑡 −𝑅
𝑐) + 𝑘𝑜𝑑𝑥 𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜑 (4.2)
𝛷𝑦 = ∆𝜔𝑦 (𝑡 −𝑅
𝑐) + 𝑘𝑜𝑑𝑦 𝑠𝑖𝑛𝜃 𝑠𝑖𝑛𝜑 (4.3)
𝑘𝑜 =2𝜋𝑓𝑜
𝑐⁄ = 2𝜋𝜆𝑜
⁄ and c is the speed of light and
If
sin (
𝑀𝛷𝑥2⁄ )
sin (𝛷𝑥
2⁄ )= 𝐴𝐹𝑥
and
sin (𝑁𝛷𝑦)⁄2)
sin (𝛷𝑦
2⁄ )= 𝐴𝐹𝑦
then, the composite array factor is the product of array factors along x-axis and along y-axis i.e.
𝐴𝐹 = 𝐴𝐹𝑥 × 𝐴𝐹𝑦.

51
4.3 ARRAY SIGNAL PROCESSING MODEL
We now develop transmit-receive signal structure for an M×N element PFDA. The transmitter
and receiver array are assumed to be collocated and the PFDA receiver architecture presented in
[90] is considered. Let s(t) be the baseband signal transmitted from each element of the array.
Considering point sources, let we have apriori knowledge of the respective locations of the target
at (𝑅𝑜, 𝜃𝑜 , 𝜑𝑜), and an interference source at (𝑅𝑖 , 𝜃𝑖 , 𝜑𝑖) such that 𝑅𝑖 ≠ 𝑅𝑜 in a clutter free
Fig 4.1: Geometry of PFDA

52
environment. Then the signal seen at the target location (𝑅𝑜, 𝜃𝑜 , 𝜑𝑜) in the far field is expressed
as:
𝑇(𝑅, 𝜃, 𝜑, ∆𝑓𝑥, ∆𝑓𝑦) = [𝐰tH𝐚𝑜(𝑅𝑜, 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥, ∆𝑓𝑦) ]𝑠(𝑡) (4.4)
Where 𝐰𝑡 is the MN×1 transmit weight vector and 𝐚𝑜(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥, ∆𝑓𝑦) is the transmit
steering vector of PFDA and is given as:
𝐚𝑜(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥, ∆𝑓𝑦) = 𝑣𝑒𝑐[𝒖(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥)𝒗𝑇(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑦)] (4.5)
Where:
vec (⋅) stands for the operator that stacks the columns of a matrix in one column vector,
(. )𝑇denotes the transpose, u and v are vectors of dimension M×1 and N×1, respectively, that are
defined as follows
𝒖(𝑅𝑜, 𝜃𝑜, 𝜑𝑜, ∆𝑓𝑥) = [1, exp2𝑗𝜋(𝑓𝑜
𝑐𝑑𝑥sin𝜃𝑜𝑐𝑜𝑠𝜑𝑜 −
∆𝑓𝑥𝑅𝑜
𝑐), … . , exp2𝑗𝜋(
𝑓𝑜
𝑐(𝑀 − 1)𝑑𝑥sin𝜃𝑜𝑐𝑜𝑠𝜑𝑜 −
∆𝑓𝑥𝑅𝑜(𝑀−1)
𝑐)]𝑇
(4.6)
𝒗(𝑅𝑜, 𝜃𝑜, 𝜑𝑜 , ∆𝑓𝑦) = [1, exp2𝑗𝜋(𝑓𝑜
𝑐𝑑𝑦sin𝜃𝑜𝑠𝑖𝑛𝜑𝑜 −
∆𝑓𝑦𝑅𝑜
𝑐), … . . , exp2𝑗𝜋(
𝑓𝑜
𝑐(𝑁 − 1)𝑑𝑦sin𝜃𝑜𝑠𝑖𝑛𝜑𝑜 −
∆𝑓𝑦𝑅𝑜(𝑁−1)
𝑐)]𝑇
(4.7)
Now let there is an interference source at (𝑅𝑖, 𝜃𝑖 , 𝜑𝑖) in the environment. At receiver side,
received data vector x at time t is given by:
𝐱(𝑡) = 𝛼0𝐰𝑡𝐻𝐚𝑜(𝑅𝑜 , 𝜃𝑜, 𝜑𝑜 , ∆𝑓𝑥 , ∆𝑓𝑦) 𝐛𝑜(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥 , ∆𝑓𝑦)𝑠(𝑡) +
𝛼𝑖𝒘𝑡𝐻𝐚𝑖(𝑅𝑖 , 𝜃𝑖 , 𝜑𝑖 , ∆𝑓𝑥 , ∆𝑓𝑦)𝐛𝑖(𝑅𝑖 , 𝜃𝑖 , 𝜑𝑖 , ∆𝑓𝑥 , ∆𝑓𝑦)𝑠(𝑡) + 𝐧(𝑡) (4.8)
Where 𝛼0 and 𝛼𝑖 are the reflection coefficients of target and the interference, respectively such

53
that 𝜎𝑜2 = 𝐸|𝛼𝑜𝛼𝑜
𝐻| is the desired signal variance and 𝜎𝑖2 = 𝐸|𝛼𝑖𝛼𝑖
𝐻| is the variance of
interference signal. 𝐛𝑜 and 𝐛𝑖 denote the receive steering vectors of the target and interferer
respectively, and have same form as Eq. (4.5). n(t) signifies an additive white Gaussian noise
vector with variance 𝜎𝑛2.
After matched filtering, the output vector y is:
𝐲 = 𝛼𝑜𝐠𝒐(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥, ∆𝑓𝑦) + 𝛼𝑖𝐠𝒊(𝑅𝑖, 𝜃𝑖 , 𝜑𝑖, ∆𝑓𝑥, ∆𝑓𝑦) + 𝐧 (4.9)
Where 𝐠𝒐 and 𝐠𝒊 are MNx1 vectors, expressed as:
𝐠𝒐(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥, ∆𝑓𝑦) = 𝐰𝑡𝐻𝐚𝑜(𝑅𝑜, 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥, ∆𝑓𝑦) 𝐛𝑜(𝑅𝑜, 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥, ∆𝑓𝑦)
𝐠𝒊(𝑅𝑖 , 𝜃𝑖 , 𝜑𝑖, ∆𝑓𝑥 , ∆𝑓𝑦) = 𝐰𝑡𝐻𝐚𝑖(𝑅𝑖 , 𝜃𝑖 , 𝜑𝑖, ∆𝑓𝑥, ∆𝑓𝑦) 𝐛𝑖(𝑅𝑖, 𝜃𝑖 , 𝜑𝑖, ∆𝑓𝑥 , ∆𝑓𝑦) (4.10)
4.4 PROPOSED FREQUENCY OFFSET SELECTION SCHEME
(FOSS)
Main objective of our planar FDA is to adaptively choose the frequency offset such that resultant
transmit beampattern has its maximum at target location (𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜) and a null, at interferer
location (𝑅𝑖, 𝜃𝑖 , 𝜑𝑖), at the same time.
4.4.1 CONDITION FOR MAXIMUM FIELD
Referring back to Eq (4.1-4.3), field or the array factor is maximum when:
∆𝜔𝑥 (𝑡 −𝑅0
𝑐) + 𝑘𝑜𝑑𝑥 𝑠𝑖𝑛𝜃𝑜 𝑐𝑜𝑠𝜑𝑜 = 2𝜋𝑢 ; 𝑢 = 0, ±1,±2
(4.11)

54
∆𝜔𝑦 (𝑡 −𝑅𝑜
𝑐) + 𝑘𝑜𝑑𝑦 𝑠𝑖𝑛𝜃𝑜 𝑠𝑖𝑛𝜑𝑜 = 2𝜋𝑣 ; 𝑣 = 0, ±1,±2
(4.12)
4.4.2 CONDITION FOR NULL
However, field is minimum when:
{sin(
𝑁 𝛷𝑥2⁄ )
sin(𝛷𝑥
2⁄ )} = 0 or {
sin (𝑀 𝛷𝑦)⁄2)
sin (𝛷𝑦
2⁄ )
} = 0 (4.13)
For {sin(
𝑁 𝛷𝑥2⁄ )
sin(𝛷𝑥
2⁄ )} = 0 (4.14)
∆𝜔𝑥 (𝑡 −𝑅𝑖
𝑐) + 𝑘𝑜𝑑𝑥 𝑠𝑖𝑛𝜃𝑖 𝑐𝑜𝑠𝜑𝑖 =
2𝜋𝑞
𝑁 ; 𝑞 = ±1,±2 ; 𝑞 ≠ 0,𝑁, 2𝑁, 3𝑁 …. (4.15)
The two phases 𝛷𝑥 and 𝛷𝑦 in Eq (4.2) and (4.3), respectively, are independent of each other, so
in order to place composite maximum at the target location, maxima of both the array factors
𝐴𝐹𝑥 and 𝐴𝐹𝑦 should be directed simultaneously towards (𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜). Let the time of propagation
of maximum of the field pattern 𝐴𝐹𝑥 from the transmit array to the target location be 𝑡𝑥 and is
calculated by Eq (4.11) as:
𝑡𝑥 =𝑅𝑜
𝑐+
1
∆𝑓𝑥(𝑢 −
𝑑𝑥
𝜆𝑜𝑠𝑖𝑛𝜃𝑜𝑐𝑜𝑠𝜑𝑜) (4.16)
Similarly the time of propagation of maximum of the field pattern 𝐴𝐹𝑦 from the transmit array to
the target location be 𝑡𝑦 and is calculated by Eq (4.12) as:
𝑡𝑦 =𝑅𝑜
𝑐+
1
∆𝑓𝑦(𝑣 −
𝑑𝑦
𝜆𝑜𝑠𝑖𝑛𝜃𝑜𝑠𝑖𝑛𝜑𝑜) (4.17)

55
Thus in order to achieve a maximum gain of M×N at (𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜): 𝑡𝑥 = 𝑡𝑦 = 𝑡𝑚𝑎𝑥 . This
condition leads to the relationship between both the frequency offsets, as
∆𝑓𝑦 =∆𝑓𝑥×[𝑣−
𝑑𝑦
𝜆𝑜𝑠𝑖𝑛𝜃𝑜𝑠𝑖𝑛𝜑𝑜]
[𝑢− 𝑑𝑥
𝜆𝑜𝑠𝑖𝑛𝜃𝑜𝑐𝑜𝑠𝜑𝑜]
(4.18)
Let 𝑡𝑛𝑢𝑙𝑙 be the time of propagation of null from the transmit array to the interferer location and
is calculated by Eq (4.15),
𝑡𝑛𝑢𝑙𝑙 =𝑅𝑖
𝑐+
1
∆𝑓𝑥(
𝑞
𝑀−
𝑑𝑥
𝜆𝑜𝑠𝑖𝑛𝜃𝑖𝑐𝑜𝑠𝜑𝑖) (4.19)
Thus for maximum of the beampattern to be placed at (𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜) and null at (𝑅𝑖, 𝜃𝑖 , 𝜑𝑖),
simultaneously:
𝑡𝑚𝑎𝑥 = 𝑡𝑛𝑢𝑙𝑙 (4.20)
This leads to:
∆𝑓𝑥 =[𝑢−
𝑑𝑥𝜆𝑜
𝑠𝑖𝑛𝜃𝑜𝑐𝑜𝑠𝜑𝑜−𝑞
𝑀+
𝑑𝑥𝜆𝑜
𝑠𝑖𝑛𝜃𝑖𝑐𝑜𝑠𝜑𝑖]
[1
𝑐×(𝑅𝑖−𝑅𝑜)]
𝑓𝑜𝑟 𝑅𝑖 ≠ 𝑅𝑜 (4.21)
.
Values of frequency offset ∆𝑓𝑥 so obtained from Eq. (4.21), give values of frequency offset ∆𝑓𝑦
in Eq. (4.18), and hence guarantee desired 3D ABF. The proposed method, as discussed above is
a transmit beamforming scheme. Frequency offsets are selected on the transmitter side, which
results in the placement of maximum of the beam at target and null at the interferer. This results
in enhanced reflections from the target and diminished reflections of interferer at the receiver
input, which dispenses the need of any lengthy iterative beamforming scheme to nullify the
interferer reflections.

56
4.5 SINR ANALYSIS.
The signal-to-interference and noise ratio SINR is defined as the ratio of the desired signal power
to the undesired signal power [91]:
SINR = 𝜎𝑜
2|𝐰𝒓𝑯𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)|
𝟐
𝒘𝒓𝑯𝐑𝐈+𝐍𝒘
𝒓
(4.22)
where 𝐰𝑟 is the receive weight vector while
𝐑𝐈+𝐍 = [𝜎𝑖2𝐠𝒊(𝑅𝑖, 𝜃𝑖 , 𝜑𝑖 , ∆𝑓𝑥, ∆𝑓𝑦)𝐠𝒊
𝐇(𝑅𝑖 , 𝜃𝑖 , 𝜑𝑖, ∆𝑓𝑥, ∆𝑓𝑦).+ 𝜎𝑛
2𝐈] is the interference plus noise
covariance matrix.
Expanding Eq (4.22)
SINR = 𝜎𝑜
2|𝐰𝒓𝑯𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)|
𝟐
𝒘𝒓𝑯[𝜎𝑖
2𝐠𝒊(𝑅𝑖,𝜃𝑖,𝜑𝑖,∆𝑓𝑥,∆𝑓𝑦)𝐠𝒊𝐇(𝑅𝑖,𝜃𝑖,𝜑𝑖,∆𝑓𝑥,∆𝑓𝑦)
.+𝜎𝑛
2𝐈]𝒘𝒓 (4.23)
or
SINR =
𝜎𝑜2
𝜎𝑛2 |𝐰𝒓
𝑯𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)|𝟐
𝒘𝒓𝑯[
𝜎𝑖2
𝜎𝑛2 𝐠𝒊(𝑅𝑖,𝜃𝑖,𝜑𝑖,∆𝑓𝑥,∆𝑓𝑦)𝐠𝒊
𝐇(𝑅𝑖,𝜃𝑖,𝜑𝑖,∆𝑓𝑥,∆𝑓𝑦).
+𝐈]𝒘𝒓
(4.24)
Here 𝜎𝑜
2
𝜎𝑛2 is the input signal to noise ratio (SNR) and
𝜎𝑖2
𝜎𝑛2 is the input interference to noise ratio
(INR).
4.5.1 MVDR BEAMFORMER FOR PFDA.
The MVDR beamformer is one of the most popular ABF systems. It minimizes the array output
power subjected to a linear constraint that the signal of interest stays distortion less; it minimizes
the array output power. This is achieved via adaptive selection of the weighting vector. In PFDA,

57
MVDR beamformer achieves ABF by adaptively selecting receive weight vector, however the
frequency offsets ∆𝑓𝑥 and ∆𝑓𝑦 stay fixed. For an MVDR beamformer employed at the receiver
side, the transmit and receive weight vector are given by [92]:
𝐰𝒕 =𝐚𝑜(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)
‖𝐚(𝑅,𝜃,𝜑,∆𝑓𝑥,∆𝑓𝑦)‖ (4.25)
𝐰𝑟 = 𝐰𝑀𝑉𝐷𝑅 =𝐑𝐈+𝐍
−𝟏 𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)
𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)𝐻
𝐑𝐈+𝐍−𝟏 𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)
(4.26)
Thus the SINR for PFDA using MVDR beamformer weights is achieved as:
SINR𝑀𝑉𝐷𝑅 = 𝜎𝑜2 [𝐠𝒐
𝐇(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥, ∆𝑓𝑦)[𝐑𝐈+𝐍]−1𝐠𝒐(𝑅𝑜, 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥, ∆𝑓𝑦)] (4.27)
4.5.2 CONVENTIONAL BEAMFORMER FOR PFDA.
For a conventional beamformer, the transmit weight vector is same as Eq (4.25). However the
receive weight vector is given by:
𝐰𝑟,𝐶𝐵 =𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)
|𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)𝐻
𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)|
12
(4.28)
Thus
SINR𝐶𝐵 =𝜎𝑠
2|𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)|4
𝜎𝑖2|𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)
𝐻𝐠𝑖(𝑅𝑖,𝜃𝑖,𝜑𝑖,∆𝑓𝑥,∆𝑓𝑦)|
2
+𝜎𝑛2|𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)|
2
(4.29)

58
4.5.3 FOSS BEAMFORMER FOR PFDA:
FOSS beamformer is a frequency offset selection method that selects offsets ∆𝑓𝑦 and ∆𝑓𝑥 by
using Eq 4.18 and 4.21 respectively. However, it utilizes unit weighting for both transmit as well
as receive weight vectors such that
𝐰𝒕 = 𝐰𝒓=𝐰𝐹𝑂𝑆𝑆 = [1] MNx1𝑇 (4.30)
Finally, the SINR comes out to be;
SINRFOSS =𝜎𝑠
2|∑ g𝑜𝑘(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓𝑥,∆𝑓𝑦)𝑀𝑁−1𝑘=0 |
𝜎𝑖2[∑ ∑ g𝑖𝑚(𝑅𝑖,𝜃𝑖,𝜑𝑖,∆𝑓𝑥,∆𝑓𝑦)g𝑖𝑛(𝑅𝑖,𝜃𝑖,𝜑𝑖,∆𝑓𝑥,∆𝑓𝑦)]+𝑀𝑁𝜎𝑛
2𝑀𝑁−1𝑛=0
𝑀𝑁−1𝑚=0
(4.31)
where g𝑜𝑘(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓𝑥 , ∆𝑓𝑦) is the kth element of the steering vector of desired signal source.
g𝑖𝑚(𝑅𝑖, 𝜃𝑖 , 𝜑𝑖, ∆𝑓𝑥, ∆𝑓𝑦) and g𝑖𝑛(𝑅𝑖, 𝜃𝑖 , 𝜑𝑖 , ∆𝑓𝑥, ∆𝑓𝑦) is the is the mth element and nth element of
the steering vector of interference source respectively.
4.6 SIMULATION RESULTS AND DISCUSSION
In order to compare the adaptive beampatterns of MVDR and proposed FOSS beamformer, we
assume PFDA radar, in a clutter free environment, at 3GHz frequency, with 8 elements along x
axis and y axis each; inter element spacing of half wavelength. Noise is modeled as white
Gaussian. Let the respective location (𝑅, 𝜃, 𝜑) of target be (7km, 50𝑜 , 60𝑜) and that of interferer
be (20km,−20𝑜 , 80𝑜). Frequency offset for MVDR beam former is taken as ∆𝑓𝑥 = 10kHz, ∆𝑓𝑦 =
1kHz. However, for proposed FOSS, frequency offsets calculated are ∆𝑓𝑥 = 9kHz and ∆𝑓𝑦 =
−6.4 kHz. 4D, sliced visualization of field obtained using proposed FOSS beamformer are
presented in Fig. 4.2. The three axes represent spherical coordinates (𝑅, 𝜃, 𝜑), while the field
intensity is represented by the colors in the beampattern. Fig. 4.2(a) represents the slices of
range–elevation beampattern at fixed azimuth angle of target (60𝑜), and interference (80𝑜).

59
Similarly, in Fig. 4.2(b), sliced 4D field visualization for 𝜃0 = 50𝑜 , 𝜃𝑖 = −20𝑜 have been
plotted while in Fig. 4.2(c) sliced 4D field visualization for 𝑅0 = 7 km, 𝑅𝑖 = 20 km are shown.
Fig. 4.2 implies that highly localized maxima and nulls are induced at precise location of target
and interferer respectively. Beampatterns of the MVDR beamformer are presented in Fig. 4.3.
Though, MVDR achieves accurate beamforming, however this can be clearly seen that, the
maxima are slightly spread in range and angular axis. Broad maxima, however are considered as
a threat in radar applications, as they can make the antenna vulnerable to noise and interference
signals coming near from the desired signal direction. Any undesired source of signal, in the near
vicinity of desired signal source gets equally illuminated, by the array. Thus it can be claimed
that, FOSS based PFDA provides much sharper and directive maxima as compared MVDR
beamformer in PFDA.

60
(a)
(b) (c)
Fig 4.2: 4D sliced visualization of field obtained by FOSS beamformer (M=8, N=8, 𝑑𝑥 = 𝑑𝑦 =𝜆
2, ∆𝑓𝑥 =
9𝑘𝐻𝑧 and ∆𝑓𝑦 = −6.4 𝑘𝐻𝑧 (a) Range –elevation beampattern at fixed azimuth angle of target and
interference. (b) Range azimuth field pattern at fixed target and interferer elevation angles (c) Field pattern
at fixed target and interferer ranges.

61
(a)
(b) (c)
Fig 4.3: 4D sliced visualization of field obtained by MVDR beamformer (M=8, N=8, 𝑑𝑥 = 𝑑𝑦 =
𝜆
2 ∆𝑓𝑥 =
10𝑘𝐻𝑧, ∆𝑓𝑦 = 1𝑘𝐻𝑧) (a) Range –elevation beampattern at fixed azimuth angle of target and interference. (b)Range
azimuth field pattern at fixed target and interferer elevation angles (c) Field pattern at fixed target and interferer
ranges.

62
Now in order to get into a deeper comparison of the beamforming performance of CB and
MVDR beamformer with FOSS beamformer, Fig. 4.4 shows comparative null placement
capability and null depths by the three beamformers. The 3D adaptive radiation pattern
demonstrated field intensity in dB with respect to range and elevation angle, keeping azimuth
angle fixed. Fig. 4.4(a, b, c) depict 3D radiation pattern of CB, MVDR beamformer and FOSS
beamformer respectively. As mentioned earlier, CB fails to steer nulls. In Fig. 4.4(a) nulls are not
only less deep but also misplaced. The MVDR beamformer, a highly robust adaptive
beamformer places nulls accurately at the desired locations. However, one can clearly see that
null depth of the proposed FOSS in Fig. 4.4(c) is more than that of MVDR beamformer in Fig.
4.4(b). The nulls of proposed FOSS are much deeper than that of MVDR beamformer nulls.
FOSS, thus is more capable of suppressing interference and clutter as compared to CB and
MVDR beamformer.
Finally, Fig. 4.5 presents output SINR versus input SNR for CB, MVDR beamformer and
proposed FOSS. It can be seen that the FOSS has 20dB higher SINR gain than MVDR
beamformer and nearly 30 dB more SINR gain than that of CB. This SINR gain is attributed to
deeper nulls and better suppression of interference than the other two techniques.

63
(a)
(b) (c)
Fig 4.4: Null depth comparison (M=8, N=8, 𝑑𝑥 = 𝑑𝑦 =
𝜆
2 ) (a) CB (∆𝑓𝑥 = 10𝑘𝐻𝑧, ∆𝑓𝑦 = 1𝑘𝐻𝑧) (b) MVDR
beamformer (∆𝑓𝑥 = 10𝑘𝐻𝑧, ∆𝑓𝑦 = 1𝑘𝐻𝑧) (c) FOSS beamformer (∆𝑓𝑥 = 9𝑘𝐻𝑧 and ∆𝑓𝑦 = −6.4 𝑘𝐻𝑧 )

64
Fig 4.5: Output SINR versus input SNR of CB (∆𝑓𝑥 = 10𝑘𝐻𝑧, ∆𝑓𝑦 =
1𝑘𝐻𝑧), MVDR (∆𝑓𝑥 = 10𝑘𝐻𝑧, ∆𝑓𝑦 = 1𝑘𝐻𝑧) beamformer, and FOSS
beamformer (∆𝑓𝑥 = 9𝑘𝐻𝑧 and ∆𝑓𝑦 = −6.4 𝑘𝐻𝑧 ) for PFDA with (M=8,
N=8, 𝑑𝑥 = 𝑑𝑦 =𝜆
2, INR =30dB).
-30 -20 -10 0 10 20 30-20
0
20
40
60
80
100
Input SNR (dB)
Ou
tpu
t S
INR
(d
B)
FOSS
MVDR beamformer
CB

65
Chapter 5
UNIFORM CIRCULAR FREQUENCY
DIVERSE ARRAYS.
5.1 INTRODUCTION
In this chapter, circular arrays have been investigated in the domain of frequency diversity,
theoretically and analytically, for the first time. The proposed geometry is termed as uniform
circular frequency diverse arrays (UCFDA). First of all, the array factor of UCFDA has been
derived. The 3D spatial beampatterns are compared with those of existing LFDA and PFDA. For
a deeper comparison, the 2D patterns are also presented comparing beam widths, directivities,
side lobe levels and null depths of the three geometries. In addition to investigating periodicities
in time, range and angle, effect of variation of different parameters on the beampattern have also
been discussed. Finally, the chapter presents ABF and SINR analysis in order to compare the
performance of UCFDA with ULPA, LFDA, and PFDA. For this purpose, MVDR beamformer
has been chosen.
The interest in FDA had mainly been limited to linear geometries i.e. LFDA and in planar
geometries i.e. PFDA. Although circular arrays are a very common and easy to implement
geometries in radars, however they remain unexplored in FDA. Thus there is still a need to
investigate the range-angle-dependent FDA beampattern in circular geometries. Numerous
studies for uniform circular arrays (UCA) have been conducted so far in PAR systems. Adaptive
beamforming in UCA has been investigated for different applications like CDMA systems [93],
smart antenna systems and wideband applications [94]. Optimized performance of UCA in terms

66
of directivity, beam widths, power consumption and ambiguity resolutions by varying number of
elements [95], element locations [7] and complex excitations using different evolutionary
algorithms like genetic algorithm, particle swarm optimization [96] are found widely in the
literature. Different other configurations of circular geometries like concentric circular arrays,
planar circular arrays [32] have been widely explored in terms of ABF capability, directivity,
side lobe levels, null gain margins and residual powers etc. However, in all these studies, UCA
has come up with a conventional limitation of range independent beampattern. Thus UCA in
FDA’s may provide a potential solution of 3D steeribility. Motivation behind this work is some
benefits of UCA i.e. beam scan azimuthally through 360𝑜, better spatial resolution [18] than
ULA and URA, and more directional beams [33].
Simulations provide comparatively better performance features of UCFDA than LFDA and
PFDA. LFDA gives 2D localization of targets i.e. range and elevation, but in UCFDA
beampattern is localized in range R, elevation 𝜃 and azimuthal angle 𝜑. The ‘s’ shaped patterns
of LFDA have infinite (𝑅, 𝜃) pairs of maximum field. However, in UCFDA, few narrow maxima
promise enhanced source localization. Thus UCFDA may offer much better interference
suppression and clutter rejection than LFDA. Though PFDA provides 3D scanning capability but
at the cost of comparatively higher number of antennas.
5.2 TRANSMIT SPATIAL BEAMPATTERN.
This section discusses expression of transmit spatial pattern in UCFDA and then, graphically
depicts the shape of the main beam. Consider a circular array of N antenna elements uniformly
spaced on a circle with radius a as shown in Fig. 5.1. With 𝑓0 being the radar operating
frequency, a progressive frequency shift of Δf is employed along the length of the array such that
the frequency at the nth element is given by:
𝑓𝑛 = 𝑓0 + 𝑛∆𝑓 (5.1)
Taking the center of the circle as reference, if R is the distance of center of circle from
observation point, then the distance between nth element and point of observation is given by:

67
𝑅𝑛 = 𝑅 − 𝑎 sin𝜃cos (𝜑 − 𝜑𝑛) (5.2)
Where 𝜃 is the elevation angle of the observation point with reference to z axis, 𝜑 is the azimuth
angle of the observation point with reference to x-axis and 𝜑𝑛 =2π𝑛
𝑁. Let the signal transmitted
by nth element at time t is expressed as:
𝑆𝑛(𝑡) = 𝛼𝑛exp{−j2π𝑓𝑛𝑡} for 0 ≤ 𝑡 ≤ 𝑇 (5.3)
Where T is the pulse duration and 𝛼𝑛 is a complex excitation for each element n.. Overall signal
arriving at far field point (𝑅, 𝜃, 𝜑) can be expressed as:
𝑆T(𝑡) = ∑ 𝛼𝑛exp {−j2π𝑓𝑛 (𝑡 −𝑅𝑛
c)}𝑁−1
𝑛=0 (5.4)
Where c is the speed of light. Putting in the values of 𝑓𝑛 and 𝑅𝑛
𝑆T(𝑡) = ∑ 𝛼𝑛exp {−j2π(𝑓0 + 𝑛∆𝑓)(𝑡 −(𝑅−𝑎 sin𝜃cos (𝜑−𝜑𝑛))
c}𝑁−1
𝑛=0 (5.5)
Making plane wave assumption i.e. 𝑅 ≫ (𝑁 − 1)𝑎 and narrowband FDA assumption i.e. (𝑁 −
1)∆𝑓 ≪ 𝑓0, the expression reduces to:
Fig 5.1: Geometry of UCFDA.

68
𝑆T(𝑡) = exp [j2π𝑓0 (𝑡 −𝑅
𝑐)]∑ 𝛼𝑛exp [j2π{𝑁−1
𝑛=0 𝑓0𝑎
csin𝜃 cos(𝜑 − 𝜑𝑛) + 𝑛∆𝑓(𝑡 −
𝑅
c)}] (5.6)
|𝑆T| = |∑ 𝛼𝑛exp [j2π{ 𝑓0𝑎
csin𝑁−1
𝑛=0 𝜃 cos(𝜑 − 𝜑𝑛) + 𝑛∆𝑓(𝑡 −𝑅
c)}]| (5.7)
5.3 BEAM STEERING
Now to direct the maximum radiation toward a point target in far-field with
coordinates (𝑅𝑜, 𝜃𝑜, 𝜑𝑜), the complex excitation 𝛼𝑛 for each element is given by
𝛼𝑛(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜) = exp( j2π[𝑓0𝑎
csin𝜃𝑜 cos(𝜑𝑜 − 𝜑𝑛) + 𝑛∆𝑓
𝑅0
c] ) (5.8)
Re-writing Eq (5.6) with additional phase term gives the total array factor for the transmit
beamforming in the direction (𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜) is:
𝐴𝐹 = |∑ exp [j2π{ 𝑓0𝑎
c(sin𝑁−1
𝑛=0 𝜃 cos(𝜑 − 𝜑𝑛) − sin𝜃𝑜cos (𝜑0−𝜑𝑛)) + 𝑛∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}]| (5.9)
Taking absolute square of the array factor gives transmit beampattern B(𝑡, 𝑅, 𝜃, 𝜑) of the
proposed UCFDA.
𝐵(𝑡, 𝑅, 𝜃, 𝜑) = |∑ exp [j2π{ 𝑓0𝑎
c(sin𝑁−1
𝑛=0 𝜃 cos(𝜑 − 𝜑𝑛) − sin𝜃𝑜cos (𝜑0−𝜑𝑛)) + 𝑛∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}]| 2
. (5.10)
Let our target be at (30°, 4km, 60°). Fig. 5.2(a, b, c) gives 4D visualizations of the beampattern
with main beam steered at the desired location. The three axes represent spherical
coordinates (𝑅, 𝜃, 𝜑), while the normalized field intensity |𝑆T| 𝑁⁄ , is represented by the colors in
the beampattern. The slices of field are positioned at planes, showing fixed values of azimuth,

69
(a) (b)
(c)
Fig 5.2: 4D beampattern of UCFDA (N=9, Δf =2kHz, d =0.5λ) at (30°, 4𝑘𝑚, 60°). (a) at
fixed target azimuthal angle of 60°. (b) at fixed target elevation angle of 30°. (c) at fixed
target range of 4km.

70
elevation and range respectively, to reveal the field beampattern in the regions of interest. Fig
5.2(a), demonstrates range-elevation beampattern for fixed azimuth angle of 60𝑜. A localized
maximum can be witnessed accurately at the desired location. In Fig. 5.2(b), generated
beampattern is sliced at fixed 𝜃 = 30°while in Fig. 5.2(c), elevation-azimuth profile at fixed
target range of 4km is shown. Sharp and 3D localized maxima can be witnessed at the desired
locations.
5.4 BEAMPATTERN COMPARISON OF UCFDA WITH LFDA
AND PFDA.
It is evident that the transmit spatial beampattern of UCFDA depends upon many factors, i.e.
time, range, elevation and azimuth angle. Now Table 5.1 gives the parameters for the transmit
spatial beampattern of UCFDA and comparative beampatterns of LFDA and PFDA. In Fig. 3,
transmit spatial beampattern obtained by Eq (5.6) is presented.
Fig. 5.3(a) represents range-elevation profile of UCFDA for fixed azimuth values. Highly
directional maxima are accurately placed at the desired location (𝑅, 𝜃, 𝜑), unlike LFDA where
pattern is only range-angle (𝑅, 𝜃) dependent and widely spread in angular axis as shown in Fig.
5.4. There are infinite (𝑅, 𝜃) pairs of maximum field. However, in Fig. 5.3(a), only few periodic
maxima appear along range axis. Hence, when it comes to clutter rejection and interference
suppression of ‘range and angle dependent sources’, UCFDA provides a better solution than
LFDA. Moreover, UCFDA outsmarts LFDA in providing beam scan for applications which
require 3D field of view.
Comparing the beampattern of UCFDA with range-elevation beampattern of PFDA in Fig. 5.4(b)
it is clear that though maxima are 3D localized, the localization is not as sharp as in UCFDA. In
PFDA maxima are quite wide. For PFDA to achieve comparable beam width as that of UCFDA,
more number of antennas are required which in turn requires more space and an increased cost.

71
(a)
(b)
Fig 5.3: 3D Transmit spatial beampattern of UCFDA (N =9, Δf =1kHz, d =0.5λ). (a)
Range-elevation profile for fixed 𝜑 = 60°. (b) Range-azimuth profile for fixed 𝜃 = 30°.

72
(a)
(b) (c)
Fig 5.4: (a) Range-elevation profile of LFDA (N =9, Δf =1kHz, d =0.5λ). (b) Range-elevation
profile of PFDA (∆𝑓𝑥 = 1𝑘𝐻𝑧, ∆𝑓𝑦 = 1𝑘𝐻𝑧 (M=3, N=3, 𝑑𝑥 = 𝑑𝑦 =𝜆
2) at 𝜑 = 60°. (c) Range-
azimuth profile of PFDA at 𝜃 = 30°.

73
Table 5.1. Simulation Parameters: (a and d expressed in wavelength λ)
Parameters UCFDA LFDA PFDA
Number of antennas 9 9 9 (i.e. 3×3)
Radius of circle, a 0.9λ - -
Carrier frequency 3GHz 3GHz 3GHz
Inter-element spacing, d - 0.5λ 0.5λ along each x and y axis.
Frequency offset 1kHz 1kHz 1kHz along x- axis, 1kHz along
y-axis
In order to make in depth comparison of the beampattern characteristics, Fig. 5.5 demonstrates
2D patterns of UCFDA, PFDA and LFDA. The patterns are plotted for fixed values of range and
azimuth angle of the target i.e. 4 km, 60° respectively. Beam width of PFDA, UCFDA and
LFDA are 50°, 25°and 14°respectively. Thus as compared to PFDA, the UCFDA places sharper
Fig 5.5: 2D beampattern of LFDA, UCFDA and PFDA for
Δf= 1kHz, and N=9.

74
maxima at the aim point. Directivity of UCFDA, PFDA and LFDA are 18.8dBi (gain in dB with
respect to isotropic antenna), 12dBi and 23dBi respectively. So when it comes to 3D target
tracking, UCFDA provides a better directional solution than PFDA. However LFDA, being most
directional of all the three geometries is still limited by its 2D steering capability. Comparing the
null depths, the first null depths of UCFDA, LFDA and PFDA are -23.07dB, -17.4dB and 30dB
respectively. This means that UCFDA achieves 6dB deeper nulls as compared to LFDA;
however, PFDA achieves deepest nulls. Since the pattern in LFDA is periodic in angle therefore
slightly deeper nulls are achieved at other angles.
5.5 ANALYSIS
According to the beampattern derived in Eq (5.6), there is a modulation in time, range and angle.
The maximum value of 𝑆T(𝑡) is the addition of magnitudes of the N complex exponentials. The
maximum radiation direction (𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜) is therefore achieved when:
2π[𝑓0𝑎
csin𝜃0 cos(𝜑0 − 𝜑𝑛) + 𝑛∆𝑓(𝑡 −
𝑅0
c)] = ±2𝑚π (5.11)
Where m = 0,1,2,3….
In-depth investigation of UCFDA beampattern reveals that the periodicity of pattern in time and
range is the same as in case of LFDA. The periodicity of beampattern in time is 1 ∆𝑓⁄ . This is
demonstrated in Fig. 5.6(a) where pattern is repeating after every 1ms for ∆𝑓 = 1 kHz and in
Fig. 5.6(b) after 0.5ms for ∆𝑓 = 2 kHz. Similarly, periodicity of maxima in range is c ∆𝑓⁄ .This
is validated in Fig. 5.7(a) where the maximum repeats after 300km for ∆𝑓 = 1 kHz while in Fig.
5.7(b), after every 150km for ∆𝑓 = 2 kHz. But the case is different when it comes to the
periodicities in angles. In LFDA, periodicity in angle, for wavelength 𝜆 and inter-element
spacing d is given by [97],
𝜆 𝑑⁄ = 𝑠𝑖𝑛𝜃1 − 𝑠𝑖𝑛𝜃2 (5.12)
However, no periodicity of pattern in elevation and azimuth is established in UCFDA.

75
(a)
(b)
Fig 5.6: Periodic pattern of time in UCFDA with (a) Δf= 1kHz (b) Δf= 2kHz

76
(a)
(b)
Fig 5.7: Periodic pattern of range in UCFDA with (a) (a) Δf= 1kHz (b) Δf= 2kHz

77
(a)
(b) (c)
Fig 5.8: (a) Range-angle beampattern in LFDA. (b) Range –elevation profile for fixed
azimuth angle in UCFDA. (c) Range –azimuth profile for fixed elevation angle in UCFDA.

78
Fig. 5.8(a) shows the range-angle beampattern in LFDA with 2 kHz offset. Pattern repeats along
angular axis. However, in UCFDA, Fig. 5.8(b) and Fig. 5.8(c) show that the periodicity neither
exists along elevation axis, nor along azimuthal axis. Thus adaptive multi-target detection and
multiple null steering can be facilitated by this feature of UCFDA, as there is no forced repetition
of beampattern after regular angular intervals.
5.6 EFFECT OF VARIATION OF DIFFERENT PARAMETERS
ON BEAMPATTERN.
Now the effect of increasing different parameters like number of elements N, inter-element
spacing d and radius of the circle a are discussed. These parameters are related through;
𝑁𝑑 = 2𝜋𝑎
5.6.1 CASE 1. INCREASING RADIUS WHILE KEEPING NUMBER OF
ELEMENTS FIXED:
Fig. 5.9 (a-c) demonstrates beampattern generated for UCFDA with Δf= 2kHz for different circle
radii (expressed in wavelength λ) i.e. 1λ, 3λ and 5λ. Fig. 5.9 shows that increasing the circle
diameter, while keeping number of elements fixed at 10, obviously increases the inter element
spacing and therefore introduces high amplitude side lobes.
5.6.2 CASE 2. INCREASING RADIUS BY INCREASING NUMBER OF
ELEMENTS WHILE KEEPING INTER-ELEMENT SPACING FIXED:
If the radius of the circle increases by increasing number of elements while keeping inter element
spacing fixed at 𝜆
2 ; it is quite evident form Fig 5.10 (a-c) that HPBW are decreasing while peak
to side lobe ratios have dramatically improved.

79
5.6.3 CASE 3. INCREASING NUMBER OF ELEMENTS WHILE KEEPING
RADIUS FIXED.
Now this case discusses a condition where the radius of the circular arrays stays constant at 5λ,
while an increase in number of elements decreases the inter element spacing. This is
demonstrated in Fig 5.11 (a-c), where a gradual increase in number of elements, results in higher
directivities and lower side lobe levels. It is evident from the above discussion that if the inter-
element spacing increases the radiation pattern suffers from high side lobe levels. This is in
accordance with the condition that 𝑑 ≤𝜆
2 in order to avoid side lobes at all frequencies [16].
Table 5.2 shows HPBW and peak to side lobe ratios (PSR) for all the three cases.
Table 5.2: HPBW and PSR for all the three cases.
N d(λ) a (λ) HPBW (°) PSR (dB)
Case 1
10 0.66 1 20 4.29
10 1.8 3 11 3.47
10 3.1416 5 07 3.22
Case 2
10 0.5 0.5 44 4.4
20 0.5 1.59 21 4.5
30 0.5 2.3 11 4.7
Case 3
10 1.6 5 05 3.6
20 1.0 5 05 3.9
30 0.7 5 05 4.3

80
(a)
(b) (c)
Fig 5.9: Beampattern of UCFDA for Case 1 with N=10, Δf= 2kHz and (a) a=1λ (b) a=3λ, (c)
a=5λ

81
(a)
(b) (c)
Fig 5.10: Beampattern of UCFDA for Case 2 with d=0.5λ, Δf= 2kHz and (a) N=10, (b) N=20, (c)
N=30.

82
(a)
(b) (c)
Fig 5.11: Beampattern of UCFDA for Case 3 with a=5λ, Δf= 2kHz and (a) N=10, (b) N=20, (c)
N=30.

83
5.7 ADAPTIVE BEAMFORMING AND SINR ANALYSIS
Consider a co-located UCFDA system with 𝑁𝑡 transmit elements and 𝑁𝑟 receiving elements,
such that 𝑁𝑡=𝑁𝑟=N. Let s(t) be the transmit waveform from each element of the array at time t.
In a clutter free environment, the signal seen at the point target location (𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜) in far field is
expressed as
[𝐰tH𝐚𝑜(𝑅𝑜, 𝜃𝑜 , 𝜑𝑜 , ∆𝑓) ]𝑠(𝑡) (5.13)
Where 𝐰𝑡 the Nx1 is transmit weight vector i.e. 𝐰𝐭𝐇 =
𝐚0(𝑅0,𝜃0,𝜑0,∆𝑓)
‖𝐚(𝑅,𝜃,𝜑,∆𝑓)‖ and 𝐚𝑜(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓) is
the transmit spatial beampattern of UCFDA, expressed as
𝐚𝑜(𝑅𝑜, 𝜃𝑜 , 𝜑𝑜 , ∆𝑓) =
[
1
exp2𝑗𝜋 (𝑓𝑜𝑎
𝑐sin𝜃𝑜 cos (𝜑𝑜 −
2𝜋
𝑁) −
∆𝑓𝑅𝑜
𝑐)
⋮ exp2𝑗𝜋 (𝑓𝑜2𝑎
𝑐sin𝜃𝑜 cos (𝜑𝑜 −
4𝜋
𝑁) −
2∆𝑓𝑅𝑜
𝑐)
⋮⋮
exp2𝑗𝜋(𝑓𝑜𝑎
𝑐(𝑁 − 1)sin𝜃𝑜 cos (𝜑𝑜 −
2𝜋(𝑁−1)
𝑁) −
(𝑁−1)∆𝑓𝑅𝑜
𝑐 ]
. (5.14)
Suppose there are D interference sources at different (𝑅𝑖, 𝜃𝑖 , 𝜑𝑖) in the environment, such that
i=1,2,…D, then at receiver side, the Nx1 received data vector x at time t is given by:
𝐱(𝑡) = 𝛼0𝐰𝑡𝐻𝐚𝑜(𝑅𝑜, 𝜃𝑜 , 𝜑𝑜 , ∆𝑓) 𝐛𝑜(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓)𝑠(𝑡) +
∑ 𝛼𝑖𝒘𝑡𝐻𝐚𝑖(𝑅𝑖, 𝜃𝑖 , 𝜑𝑖, ∆𝑓)𝐛𝑖(𝑅𝑖, 𝜃𝑖 , 𝜑𝑖, ∆𝑓)𝑠(𝑡)𝐷
𝑖=1 + 𝐧(𝑡) (5.15)
Where 𝛼0 and 𝛼𝑖 are the reflection coefficients of target and the ith interference, respectively. All
𝛼𝑖 ′𝑠 are mutually uncorrelated with zero mean and variance 𝜎𝑖2 . 𝐛𝑜 and 𝐛𝑖 denote the receive
steering vectors of the target and ith interferer respectively, and have same form as Eq. (5.14).

84
n(t) signifies an additive white Gaussian noise vector with variance 𝜎𝑛2. After matched filtering,
the output vector y is:
𝐲 = 𝛼0𝐠𝒐(𝑅𝑜 , 𝜃𝑜 , ∆𝑓) + ∑ 𝛼𝑖𝐠𝒊(𝑅𝑖, 𝜃𝑖 , 𝛷𝑖, ∆𝑓)𝐷𝑖=1 + 𝐧 (5.16)
Where 𝐠𝒐 and 𝐠𝒊 are Nx1 vectors, expressed as:
𝐠𝒐(𝑅0, 𝜃0, 𝜑0, ∆𝑓) = 𝐰𝑡𝐻𝐚0(𝑅0, 𝜃0, 𝜑0, ∆𝑓) 𝐛0(𝑅0, 𝜃0, 𝜑0, ∆𝑓) (5.17)
𝐠𝒊(𝑅𝑖, 𝜃𝑖 , 𝜑𝑖, ∆𝑓) = 𝐰𝑡𝐻𝐚𝑖(𝑅𝑖 , 𝜃𝑖 , 𝜑𝑖, ∆𝑓) 𝐛𝑖(𝑅𝑖, 𝜃𝑖 , 𝜑𝑖, ∆𝑓) (5.18)
In the receive array, the receive MVDR weight vector is given by:
𝐰𝑟 = 𝐰𝑀𝑉𝐷𝑅 =𝐑𝐈+𝐍
−𝟏 𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓)
𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓)𝐻𝐑𝐈+𝐍−𝟏 𝐠𝒐(𝑅𝑜,𝜃𝑜,𝜑𝑜,∆𝑓)
(5.19)
Where 𝐑𝐈+𝐍 = [∑ 𝜎𝑖2𝐠𝒊(𝑅𝑖, 𝜃𝑖 , 𝜑𝑖, ∆𝑓)𝐠𝒊
𝐇(𝑅𝑖, 𝜃𝑖 , 𝜑𝑖, ∆𝑓)𝑫𝒊=𝟎 .
+ 𝜎𝑛2𝐈] is the interference plus noise
covariance matrix. The SINR is defined as the ratio of the desired signal power to the undesired
signal power
SINR=𝜎𝑜
2|𝐰𝒓𝑯𝐠𝒐(𝑅𝑜,𝜃𝑜,𝛷𝑜,∆𝑓)|
𝟐
𝒘𝒓𝑯𝐑𝐈+𝐍𝒘𝒓
(5.20)
Where 𝜎𝑜2 = 𝐸|𝛼0|
2 and 𝜎𝑖2 = 𝐸|𝛼𝑖|
2 is the desired signal and ith interference variance
respectively. Thus the SINR for UCFDA using MVDR beamformer weights is achieved as:
SINR = 𝜎𝑜2 [𝐠𝒐
𝐇(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓)[𝐑𝐈+𝐍]−1𝐠𝒐(𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜 , ∆𝑓)] (5.21)

85
5.7.1 SIMULATION RESULTS:
In a clutter free environment, single target and two interference sources are assumed. For
comparison, 3GHz, 9 element and 0.5λ inter-element spacing ULPA, LFDA, PFDA (3× 3) ,
UCFDA arrays, are considered. Other simulation parameters with locations of sources are shown
in Table 5.3.
In order to emphasize the superiority of UCFDA over LFDA, PFDA and ULPA in terms of 3D
beam scanning, the scenario considered is such that one of the interferer shares same elevation
and azimuth angle with the target. Fig. 5.12- Fig. 5.15 compare adaptive beampatterns of ULPA,
LFDA, PFDA and UCFDA respectively.
In Fig. 5.12, ULPA fails to locate a minimum at the interferer location with same elevation angle
as target. Similarly, in Fig. 5.13, the LFDA only provides 2D beam scanning independent of
azimuth angle. An infinite (𝑅, 𝜃) maxima pairs can be noticed in the area of maximum field.
In Fig. 5.14 however, PFDA does offer 3D beam scanning as depicted by the sliced 4D
beampattern. The nulls are sharply placed at the respective locations, but the maximum is extra
wide. Wide maximum is an unwanted feature in radar communications as one of the interferer
sharing same angles with the target, is also receiving quite high radiation level due to the wide
maximum.
However in Fig. 5.15, the UCFDA offers much sharper maxima and minima at the desired
locations than PFDA. Both the interferers are well in the dark region. Hence, UCFDA provides
adaptive beampattern for the case when target and interferer share same angles, a phenomenon
seldom achieved in radar systems [98] with ULPA and LFDA. Thus UCFDA promises to offer
much better interference suppression and clutter rejection than its linear and planar counterparts.
SINR comparison in Fig. 5.16 clearly shows that UCFDA outsmarts ULPA, LFDA and PFDA.
This result indicates UCFDA has an advantage in offering sharper maxima and preventing the
interfering signals from deteriorating the smart antenna arrays performance as compared to
ULPA, LFDA and PFDA.

86
Table 5.3: Simulation parameters for adaptive beamforming and SINR analysis.
Parameters UCFDA LFDA ULPA PFDA
Radius of circle, a in
wavelengths λ
5
2𝜋λ(for d=0.5 λ) - - -
Frequency offset 2kHz 2kHz 0 2kHz
Target location (7𝑘𝑚, 100 , 80𝑜)
Interferer 1 (20𝑘𝑚, 100 , 80𝑜)
Interferer 2 (12𝑘𝑚,−900 , 200𝑜)
Fig 5.12: Adaptive beampattern for ULPA (N =9, Δf =0, d =0.5λ)

87
Fig 5.13. Adaptive beampattern for LFDA (N =9, Δf =2kHz,
d =0.5λ)
Fig 5.13: ABF pattern of PFDA (∆𝒇𝒙 = 𝟐𝒌𝑯𝒛, ∆𝒇𝒚 = 𝟐𝒌𝑯𝒛
M=3, N=3, 𝒅𝒙 = 𝒅𝒚 =𝝀
𝟐)

88
Fig 5.14: Comparative curve of input SNR versus output SINR,
with input INR=30dB (Simulation parameters of Table 5.3).
Fig 5.15: ABF pattern of UCFDA (N =9, Δf =2kHz, d =0.5λ)

89
Chapter 6
TANGENT HYPERBOLIC CIRCULAR
FREQUENCY DIVERSE ARRAYS
6.1 INRODUCTION.
In this chapter, we have proposed circular frequency diverse array (CFDA), with non-uniform
frequency offset. The non-uniform function selected for this purpose is tangent hyperbolic
function. The proposed system is termed as Tangent hyperbolic circular frequency diverse arrays
(TH-CFDA). The chapter deeply investigates the impact of tangent hyperbolic function
‘tanh(𝛾𝑛)’ on the frequency offset in CFDA. Array factor of TH-CFDA has been derived.
Transmit spatial beampatterns of the three configurations of TH-CFDA have been probed into.
Furthermore, in order to emphasize the superiority of TH-CFDA over existing non-uniform
frequency offset techniques i.e. Log-FDA, comparisons of 3D and 2D beampatterns have been
presented. The chapter further examines the utility of the proposed TH-CFDA in some practical
radar scenarios.
Most of the work done in FDA is with uniform frequency offset, where the frequency offset
applied is a linear function of the element index.
𝑓𝑛 = 𝑓0 + 𝑛∆𝑓 (6.1)

90
The beampattern so obtained is periodic in range, angle and time. Due to this multiple- maxima
beampattern, signal to interference plus noise ratio (SINR) can suffer severe degradation as there
is chance that any potential interferers, located at any of the maxima, can come into the radar
scene. To improve SINR, recently FDA with non-uniform frequency offset has been proposed.
i.e. frequency offset applied is a non-linear function of the element index.
𝑓𝑛 = 𝑓0 + 𝑔(𝑛)∆𝑓 (6.2)
where 𝑔(𝑛) is any non-linear function.
So far the non-linear function investigated is logarithmic function i.e. Log-FDA [58], where
beampattern with a single maximum at the target location is achieved. The single-maximum
beampattern improves SINR and detectability of the radar system as compared to multiple
maximum beampattern. However, the logarithmically increasing frequency offset has been
applied to linear frequency diverse array (LFDA) which fails to provide 3D target localization
and also results in beampattern with high side lobe levels.
6.2 TANGENT HYPERBOLIC FUNCTION IN CFDA.
In this chapter, for the proposed TH-CFDA
𝑔(𝑛) = tanh (𝛾𝑛) (6.3)
i.e. the frequency increments are employed as tangent hyperbolic function of the element index.
Tangent hyperbolic function ‘tanh(𝛾𝑛)’ is a commonly used non-linear function. By varying
parameter 𝛾, different realizations of tangent hyperbolic function can be obtained as illustrated in
Fig.6.1. The figure has been plotted for different values of 𝛾. For lower value of 𝛾, function is
quite linear in the region visible in the plot. Curve for 𝛾 = 0.03 shows that the function is almost
linear in the region from n = 0 to 10. For 𝛾 = 0.08, the function stays alomost linear. However,
as the value of 𝛾 approaches 0.1 and beyond, function starts losing its linearity. At 𝛾 = 0.5, the
non-linearity becomes obvious as the curve starts to attain a non-linear behavior after n =2.
When 𝛾 increases above unity, the function approaches signum function. Thus we can categorize

91
the behavior of tangent hyperbolic function in three different ranges. For 0 < 𝛾 ≤ 0.1, the
function is almost linear. For 0.1 < 𝛾 ≤ 1, the function starts getting non-linear, and finally for
𝛾 ≥ 1, the function approaches a signum function.
Since n refers to the element index here, therefore from the above discussion it is clear
that, frequency offset when applied as tangent hyperbolic function of the element index,
will result in different configurations of CFDA. i.e
1. For 0 < 𝛾 ≤ 0.1 ;
Function is almost linear resulting in a uniform frequency offset.
TH-CFDA acts as CFDA with uniform frequency offset (UFO).
2. For 0.1 < 𝛾 ≤ 1 ;
Function starts getting nonlinear resulting in a non-uniform frequency offset.
TH-CFDA acts as CFDA with non-uniform frequency offset (NUFO).
3. For 𝛾 ≥ 1;
Function approaches a signum function with effectively no frequency offset.
TH-EFDA acts as Circular phased array radar (CPAR).
-10 -5 0 5 10-1
-0.5
0
0.5
1
n
tan
h n
-1
-0.5
0
0.5
1
-10 -5 0 5 10
=0.03
=0.08
=0.1
=0.5
=1
Fig 6.1: Tangent hyperbolic function.

92
6.3 PROPOSED SYSTEM MODEL
Consider a circular array of N antenna elements uniformly spaced on a circle with radius a as
shown in Fig. 6.2a, where N is an even number. With 𝑓0 being the radar operating frequency, a
non-uniform frequency offset based on tangent hyperbolic function is applied along the length of
the array such that the frequency of the nth element is given by:
𝑓𝑛 = [𝑓0 + tanh(𝛾𝑛)∆𝑓 ∶ 0 ≤ 𝑛 ≤
𝑁
2
𝑓0 + tanh(𝛾(𝑁 − 𝑛)) ∆𝑓 ∶𝑁
2+ 1 ≤ 𝑛 ≤ 𝑁 − 1
(6.4)
As shown in the Fig. 6.2a, frequency offsets are symmetrical along the radial line i.e. offsets
along the lower half of the circle, are the reflection of the offsets along upper semi-circle. Fig.
6.2b, represents CFDA in spherical coordinate system. Taking the center of the circle as
reference, if R is the distance from the reference point to an observation point, then the distance
between nth element and point of observation is given by:
𝑅𝑛 = 𝑅 − 𝑎 sin𝜃cos (𝜑 − 𝜑𝑛) (6.5)
Where 𝜃 and 𝜑 are the elevation and azimuth angles of the observation point with reference to z
and x-axes respectively and 𝜑𝑛 =2π𝑛
𝑁. Let the signal transmitted by nth element at time t is
expressed as:
𝑆𝑛(𝑡) = 𝛼𝑛exp{−j2π𝑓𝑛𝑡} for 0 ≤ 𝑡 ≤ 𝑇 (6.6)
Where T is the pulse duration and 𝛼𝑛 is a complex excitation for each element n. Overall signal
arriving at far field point (𝑅, 𝜃, 𝜑) can be expressed as:
𝑆T(𝑡) = ∑ 𝛼𝑛exp {−j2π𝑓𝑛 (𝑡 −𝑅𝑛
c)}𝑁−1
𝑛=0 (6.7)
Where c is the speed of light. Putting in the values of 𝑓𝑛and 𝑅𝑛

93
(a)
(b)
Fig 6.2: (a). Frequency offset distribution along the elements of CFDA. (b). Geometry
of CFDA in spherical coordinate system

94
𝑆T(𝑡) = ∑ 𝛼𝑛exp {−j2π(𝑓0 + tanh(𝛾𝑛)∆𝑓)(𝑡 −(𝑅−𝑎 sin𝜃cos (𝜑−𝜑𝑛))
c}
𝑁/2𝑛=0 +
∑ 𝛼𝑛exp {−j2π(𝑓0 + tanh(𝛾(𝑁 − 𝑛))∆𝑓)(𝑡 −(𝑅−𝑎 sin𝜃cos (𝜑−𝜑𝑛))
c}𝑁−1
𝑛=𝑁
2+1
(6.8)
Making plane wave assumption i.e. 𝑅 ≫ (𝑁 − 1)𝑎 and narrowband FDA assumption i.e.
tanh [𝛾 (𝑁
2)]∆𝑓 ≪ 𝑓0, the expression can be approximated to:
𝑆T(𝑡) = exp [−j2π𝑓0 (𝑡 −𝑅
𝑐)] [∑ 𝛼𝑛exp [j2π{
𝑁
2𝑛=0 𝑓0
𝑎
csin𝜃 cos(𝜑 − 𝜑𝑛) + (tanh(𝛾𝑛))∆𝑓(𝑡 −
𝑅
c)}] + ∑ 𝛼𝑛exp [j2π{𝑁−1
𝑛=𝑁
2+1
𝑓0𝑎
csin𝜃 cos(𝜑 − 𝜑𝑛) + {tanh(𝛾(𝑁 − 𝑛))}∆𝑓(𝑡 −
𝑅
c)}]] (6.9)
Thus the array factor of the proposed TH-CFDA can be expressed as:
AF(𝑡, 𝑅, 𝜃, 𝜑)= [∑ 𝛼𝑛exp [j2π{𝑁
2𝑛=0 𝑓0
𝑎
csin𝜃 cos(𝜑 − 𝜑𝑛) + (tanh(𝛾𝑛))∆𝑓(𝑡 −
𝑅
c)}] +
∑ 𝛼𝑛exp [j2π{𝑁−1
𝑛=𝑁
2+1
𝑓0𝑎
csin𝜃 cos(𝜑 − 𝜑𝑛) + {tanh(𝛾(𝑁 − 𝑛))}∆𝑓(𝑡 −
𝑅
c)}]] (6.10)
In order to steer the beam towards a target location (𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜), the complex excitation 𝛼𝑛 for
each element is given by:
𝛼𝑛(𝑅𝑜, 𝜃𝑜 , 𝜑𝑜) =
[exp( j2π[𝑓0
𝑎
csin𝜃𝑜 cos(𝜑𝑜 − 𝜑𝑛) + tanh (𝛾𝑛)∆𝑓
𝑅0
c] ) ∶ 0 ≤ 𝑛 ≤
𝑁
2
exp( j2π[𝑓0𝑎
csin𝜃𝑜 cos(𝜑𝑜 − 𝜑𝑛) + tanh (𝛾(𝑁 − 𝑛))∆𝑓
𝑅0
c] ) ∶
𝑁
2+ 1 ≤ 𝑛 ≤ 𝑁 − 1
(6.11)
Re-writing Eq. (6.10) with additional phase term:
𝐴𝐹(𝑡, 𝑅, 𝜃, 𝜑) =
∑ exp [j2π{ 𝑓0𝑎
c(sin
𝑁
2𝑛=0 𝜃 cos(𝜑 − 𝜑𝑛) − sin𝜃𝑜cos (𝜑0−𝜑𝑛)) + (tanh(𝛾𝑛))∆𝑓(𝑡 −
𝑅−𝑅𝑜
c)}] +
∑ exp [j2π{ 𝑓0𝑎
c(sin𝑁−1
𝑛=𝑁
2+1
𝜃 cos(𝜑 − 𝜑𝑛) − sin𝜃𝑜cos (𝜑0−𝜑𝑛)) + {tanh(𝛾(𝑁 − 𝑛))}∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}]
(6.12)

95
Taking absolute square of the array factor gives transmit beampattern B(𝑡, 𝑅, 𝜃, 𝜑) of the
proposed TH-CFDA.
B(𝑡, 𝑅, 𝜃, 𝜑) =
|∑ exp [j2π{ 𝑓0𝑎
c(sin
𝑁
2𝑛=0 𝜃 cos(𝜑 − 𝜑𝑛) − sin𝜃𝑜cos (𝜑0−𝜑𝑛)) + (tanh(𝛾𝑛))∆𝑓(𝑡 −
𝑅−𝑅𝑜
c)}] +
∑ exp [j2π{ 𝑓0𝑎
c(sin𝑁−1
𝑛=𝑁
2+1
𝜃 cos(𝜑 − 𝜑𝑛) − sin𝜃𝑜cos (𝜑0−𝜑𝑛)) + {tanh(𝛾(𝑁 − 𝑛))}∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}]|
2
(6.13)
(a) (b)
Fig 6.3: For N=20, Δf= 20 kHz (a) Range-elevation beampattern of TH-CFDA with 𝛾 = 0.03. (b).
Range-azimuth beampattern of TH-CFDA with 𝛾 = 0.03.

96
6.4 SIMULATIONS, RESULTS AND DISCUSSION
Here, the beampattern obtained in Eq. (6.10) are simulated for target location (R=300km,
𝜃 =20°, 𝜑 =80°) and for different values of 𝛾 to validate the configurable behavior of TH-
CFDA as discussed previously. We assume TH-CFDA with 𝑁 = 20, 𝑎 = 0.9 λ where λ is the
working wavelength of the radar. Radar operating frequency is assumed to be 10GHz.
Now for 𝛾 = 0.03, ∆𝑓 =20 kHz beampatterns are plotted in Fig. 6.3. Fig. 6.3a demonstrates
range-elevation beampattern, while Fig. 6.3b shows range-azimuth profile of the proposed
system. As discussed previously the system behaves as CFDA with UFO. 3D highly localized
and periodic maxima can be observed which is in accordance with the beampattern of CFDA
with linear frequency offset [99].
Now when 𝛾 = 0.5, ∆𝑓 =5 kHz, Fig.6.4a shows single maxima at the target location. Periodicity
of the pattern vanishes and there appears only a single maximum in the visible range. In a
periodic beampattern, the interferers or other undesirable signal sources located at any of the
periodic maxima will be highly illuminated by the beampattern, rather than getting suppressed.
This will result in severe degradation of SINR of the system. Furthermore the clutter and noise
present in the radar environment makes radar echo returns rich in undesired signal power. This
imposes a heavy computational load on the signal processing units to detect and estimate desired
signal sources. By configuring TH-CFDA as NUFO based CFDA, single-maximum beampattern
is generated with considerably reduced side lobes. Thus any undesirable signal source located
other than target location will be effectively suppressed. This will not only increase system’s
SINR but also make detection very easy by converting it to a binary hypothesis testing problem.
Log-FDA [58] also provides a single maximum beampattern. Now for comparison, beampattern
of Log-FDA in CFDA has also been provided. The Log-FDA technique when applied to CFDA
also eliminates periodicity but generates beampattern with considerably raised side lobes, and in
the near vicinity of the target.

97
(f)
(a) (b). (c)
(d) (e) (f)
Fig 6.4: For N=20, Δf= 5 kHz (a) Range-elevation profile of TH-CFDA = 0.5 (b) Range-elevation profile of
log-CFDA (c) Range-elevation profile of TH-CFDA with = 5. (d) Range-azimuth profile of Tan-hyperbolic
CFDA = 0.5. (e) Range-azimuth profile of log-CFDA (f) Range-azimuth profile of TH-CFDA with = 5

98
Fig.6.4a and Fig. 6.4b compare range-elevation beampatterns of TH-CFDA and Log-CFDA
respectively. Comparison shows quite pronounced off-peak maxima or side lobes in Log-CFDA.
TH-CFDA therefore outsmarts Log-CFDA due to comparatively reduced side lobes. Same
comparison can be witnessed in Fig. 6.4d and Fig. 6.4e. Higher side lobes can make the antenna
vulnerable to interference and noise. Figure 6.5 provides a quantified proof of 2db lower side
lobes in TH-CFDA as compared to Log –FDA. Secondly deeper nulls of TH-CFDA also make it
a better candidate for null steering and beamforming applications.
0 500 1000 1500 2000-70
-60
-50
-40
-30
-20
-10
0
X: 526.2
Y: -9.647
Range (km)
Fie
ld in
ten
sity (
dB
)
X: 541.4
Y: -11.62
Log-CFDA
TH-CFDA
Fig 6.5: 2D comparison of TH-CFDA and Log –FDA for N=20, Δf= 3 kHz and = 0.5

99
Although log and tangent hyperbolic both are non-linear functions and both when employed in
FDA generate a single-maximum beampattern, however the TH-CFDA is quite a flexible system
with an adjustable parameter 𝛾, unlike log-FDA which is a fixed beampattern configuration.
Now as 𝛾 has been further increased beyond unity i.e. 𝛾 = 5, spatial beampattern of CPAR is
achieved, as shown in Fig.6.4c and Figure 6.4f. A slight difference in the beampattern with that
of CPAR is because of the frequency difference between the first element and rest of the array.
6.5 SCENARIOS.
Following are some scenarios in which the proposed TH-CFDA may offer additional flexibility
in different radar applications.
A. One Target, one interferer with same range but different elevation and azimuth angles.
In this scenario we assume that the radar environment comprises of a target and an interferer at
(40km, -40°, 80°) and (40km, 20°, 170°) respectively. The target and interferer are at the same
slant range but different elevation and azimuth angles. In order to localize the target, we use the
double-pulse transmission technique proposed by [100]. As mentioned earlier, the proposed FDA
can be configured as CFDA with UFO and a CPAR. In the first step transmitter sends a pulse as
a CPAR. Elevation and azimuth angles can be directly estimated by processing the radar returns.
Literature provides several direction of arrival estimation techniques in UCA [101], [102], [103].
Thereafter, the second pulse is transmitted based on the estimated angle of the target as CFDA
with UFO. Fig. 6.6(a) and 6.6(b) depict the 𝑅, 𝜃 response and 𝑅, 𝜑 response of TH-CFDA. The

100
(b)
(a)
Fig 6.6: (a) 𝑅, 𝜃 response of TH-CFDA in scenario A. (b) 𝑅, 𝜑 response of TH-CFDA in
scenario A.

101
Figures clearly demonstrate that the reflections from the interference source are diminished,
while the reflected signal from the target is enhanced, improving SINR at the receiver.
B. One Target, one interferer with different range but same elevation and azimuth angles.
In this scenario, the radar environment is assumed to be comprising of a single target and single
interferer, located at ( 400𝑘𝑚,−40°, 80°) and ( 650𝑘𝑚,−40°, 80°) respectively. The target
and interferer are located at different ranges but in the same angular sector. Again employing the
double pulse technique, the first pulse is transmitted in CPAR mode. The presence of target and
an interferer is detected in the respective angle (elevation and azimuth) cells. In contrast to
scenario A, second pulse is transmitted as CFDA with NUFO, where the beampattern comprises
of a single maximum. The reason, we have not employed second pulse transmission as CFDA
with UFO is that the periodic maxima of the beampattern appear in the same angular sectors.
Thus there is a chance that the interferer may lay at one of the periodic maxima locations. This
will cause an enhanced interference level at the receiver, causing severe degradation of SINR.
Therefore, for this case second pulse is transmitted as CFDA with NUFO. Fig. 6.7(a) and 6.7(b)
depict the 𝑅, 𝜃 response and 𝑅, 𝜑 response of TH-CFDA for this scenario. The radar return will
give quite an accurate estimate of the range of target; however, the returns from the interferer
will be suppressed resulting in enhanced SINR of the system because of a single maximum
beampattern.

102
(a)
(b)
Fig 6.7: (a) (𝑅, 𝜃) response of TH-CFDA in scenario B. (b) (𝑅, 𝜑) response of TH-CFDA in
scenario B.

103
Chapter 7
ELLIPTICAL FREQUENCY DIVERSE
ARRAYS (WITH UNIFORM AND
NON-UNIFORM FREQUENCY
OFFSETS)
7.1 INTRODUCTION
In this chapter elliptical arrays have been investigated in the domain of frequency diversity.
Frequency diversity gives the beampattern an extra dimension of range- dependency. The
chapter has been divided into two parts. The first part deals with elliptical frequency diverse
arrays (EFDA) with uniform frequency offset (UFO). Expression for the array factor of EFDA
with UFO has been derived. Effect of increasing eccentricity on beampatterns has been
investigated and compared in terms of beam widths, directivities and side lobe level (SLL). In
addition, the periodicities in time, range and angle, have also been discussed.
In the second part, EFDA with non-uniform frequency offset (NUFO) has been considered. The
function selected for this purpose is tangent hyperbolic function. The array factor for Tangent
hyperbolic Elliptical frequency diverse arrays (TH-EFDA) has been derived. Beampatterns for
three different configurations of TH-EFDA for three regions of 𝛾 have been explored. The
beampattern of TH-EFDA in non-linear region is compared with existing Log-FDA in elliptical
geometries. Furthermore, effect of increasing eccentricity on the beampattern has been
investigated in the non-linear region.

104
As discussed in the previous chapters, the very obvious superiority of rectangular and circular
geometry in FDA is the 3D scanning capability i.e. (𝑅, 𝜃, 𝜑) as compared to LFDA which gives
only 2D i.e. (𝑅, 𝜃) scanning. However, the comparison between PFDA and UCFDA shows that
UCFDA offers the narrower main-lobe in a given direction, both in angle as well as in range as
compared to PFDA. For PFDA to achieve narrow beam width and higher directivity, quite more
number of elements are required, which obviously increases the cost of the system. However, a
major disadvantage of circular geometry is that it suffers from high side lobe levels (SLL). Side
lobes can be reduced by decreasing the inter-element spacing but, this will signify the effect of
mutual coupling between elements. [104] has used elliptical phased arrays in order to reduce the
SLL, utilizing the extra parameter of “eccentricity’ in optimization problem. So far elliptical
arrays have been investigated only in phased array systems [100-104]. Elliptical phased arrays,
with their different geometrical configurations have been investigated in [100], [105]-[109] and
it has been shown that elliptical phased arrays (EPAR) are useful for beamforming and smart
antenna applications. [109] further has mentioned that the directivity of an elliptical phased array
decreases with increasing eccentricity; however, the SLL stays constant. Investigation of EFDA
however validates that though directivity decreases with increasing eccentricity, but the side lobe
levels undergo a slight decrease with increasing eccentricity. Furthermore, the best feature of
EFDA, where it outsmarts UCFDA, PFDA and LFDA is its range selective beampattern. The
chapter produces graphical evidence, showing that along range axis not only peak is sharper but
also the side lobe concentration is minimum. This is a very important achievement as EFDA
reduces the spread of energy in the undesired regions. Thus EFDA are a more suited
configuration for range dependent applications as they may offer much better range dependent
interference suppression and clutter rejection than other FDA counterparts.
7.2 ELLIPTICAL FREQUENCY DIVERSE ARRAYS (EFDA).
Consider an elliptical array of N antenna elements uniformly spaced on an ellipse as shown in
Fig. 7.1, where N is an even number. The center of the ellipse is located at the origin on the x–y
plane, with a and b are the semi-major axis and semi-minor axis respectively. With 𝑓0 being the

105
radar operating frequency, a linear frequency offset is applied along the length of the array such
that the frequency at the nth element is given by:
𝑓𝑛 = [𝑓0 + 𝑛∆𝑓 ∶ 0 ≤ 𝑛 ≤
𝑁
2
𝑓0 + (𝑁 − 𝑛)∆𝑓 ∶𝑁
2+ 1 ≤ 𝑛 ≤ 𝑁 − 1
(7.1)
where n is the index of nth element. Taking the center of the ellipse as reference, if R is the
distance from the reference point to an observation point, then the distance between nth element
and point of observation is given by:
𝑅𝑛 ≅ 𝑅 − sin𝜃(𝑎cos𝜑 cos𝜑𝑛 + 𝑏sin𝜑 sin𝜑𝑛) (7.2)
Where 𝜃 and 𝜑 are the elevation and azimuth angles of the observation point with reference to z
and x-axes respectively and 𝜑𝑛 =2π𝑛
𝑁. Also the eccentricity e of the ellipse is given by:
𝑒 = √1 −𝑏2
𝑎2 (7.3)
The eccentricity of an ellipse is always less than 1. Thus circle is a special case of an ellipse with
zero eccentricity.

106
Where 𝜃 and 𝜑 are the elevation and azimuth angles of the observation point with reference to z
and x-axes respectively and 𝜑𝑛 =2π𝑛
𝑁. Also the eccentricity e of the ellipse is given by:
𝑒 = √1 −𝑏2
𝑎2 (7.3)
The eccentricity of an ellipse is always less than 1. Thus circle is a special case of an ellipse with
zero eccentricity.
Let the signal transmitted by nth element at time t is expressed as:
𝑆𝑛(𝑡) = 𝛼𝑛exp{j2π𝑓𝑛𝑡} for 0 ≤ 𝑡 ≤ 𝑇 (7.4)
n
a
R
nR
n
N
1
2
b
x
y
z
Fig 7.1:Geometry of EFDA

107
Where T is the pulse duration and 𝛼𝑛 is a complex excitation for each element n. Overall signal
arriving at far field point (𝑅, 𝜃, 𝜑) can be expressed as:
𝑆T(𝑡) = ∑ 𝛼𝑛exp {j2π𝑓𝑛 (𝑡 −𝑅𝑛
c)}𝑁−1
𝑛=0 (7.5)
Where c is the speed of light. Putting in the values of 𝑓𝑛and 𝑅𝑛
𝑆T(𝑡) = ∑ 𝛼𝑛exp {j2π(𝑓0 + 𝑛∆𝑓)(𝑡 −𝑅− sin𝜃(𝑎cos𝜑 cos𝜑𝑛+𝑏sin𝜑 sin𝜑𝑛))
c} +
𝑁/2𝑛=0
∑ 𝛼𝑛exp {j2π(𝑓0 + (𝑁 − 𝑛)∆𝑓)(𝑡 −𝑅− sin𝜃(𝑎cos𝜑cos𝜑𝑛+𝑏sin𝜑 sin𝜑𝑛))
c}𝑁−1
𝑛=𝑁
2+1
. (7.6)
Making narrowband FDA assumption i.e. (𝑁
2)∆𝑓 ≪ 𝑓0, the expression can be approximated to:
𝑆T(𝑡) = exp [j2π𝑓0 (𝑡 −𝑅
𝑐)] [∑ 𝛼𝑛exp [j2π{
𝑁
2𝑛=0 𝑓0
sin𝜃
c(𝑎cos𝜑 cos𝜑𝑛 + 𝑏sin𝜑 sin𝜑𝑛) + 𝑛∆𝑓(𝑡 −
𝑅
c)}] + ∑ 𝛼𝑛exp [j2π{𝑁−1
𝑛=𝑁
2+1
𝑓0sin𝜃
c(𝑎cos𝜑 cos𝜑𝑛 + 𝑏sin𝜑 sin𝜑𝑛) + (𝑁 − 𝑛)∆𝑓(𝑡 −
𝑅
c)}]]
(7.7)
Thus the array factor of EFDA can be expressed as:
AF(𝑡, 𝑅, 𝜃, 𝜑)= [∑ 𝛼𝑛exp [j2π{𝑁
2𝑛=0 𝑓0
sin𝜃
c(𝑎cos𝜑 cos𝜑𝑛 + 𝑏sin𝜑 sin𝜑𝑛) + 𝑛∆𝑓(𝑡 −
𝑅
c)}] +
∑ 𝛼𝑛exp [j2π{𝑁−1
𝑛=𝑁
2+1
𝑓0sin𝜃
c(𝑎cos𝜑 cos𝜑𝑛 + 𝑏sin𝜑 sin𝜑𝑛) + (𝑁 − 𝑛)∆𝑓(𝑡 −
𝑅
c)}]] (7.8)
7.2.1 BEAM STEERING:
In order to steer the beam towards a target location (𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜), the complex excitation 𝛼𝑛 for
each element is given by:

108
𝛼𝑛(𝑅𝑜, 𝜃𝑜 , 𝜑𝑜) =
[exp(− j2π[𝑓0
sin𝜃0
𝑐(𝑎cos𝜑0 cos𝜑𝑛 + 𝑏sin𝜑0 sin𝜑𝑛) + 𝑛∆𝑓
𝑅0
c] ) ∶ 0 ≤ 𝑛 ≤
𝑁
2
exp(−j2π[𝑓0𝑠𝑖𝑛𝜃0
𝑐(𝑎cos𝜑0 cos𝜑𝑛 + 𝑏sin𝜑0 sin𝜑𝑛) + (𝑁 − 𝑛)∆𝑓
𝑅0
c] ) ∶
𝑁
2+ 1 ≤ 𝑛 ≤ 𝑁 − 1
(7.9)
Re-writing Eq (7.8) with additional phase term:
𝐴𝐹(𝑡, 𝑅, 𝜃, 𝜑) = [∑ exp [j2π{𝑁
2𝑛=0
𝑓0
c{𝑎(sin𝜃cos𝜑 − sin𝜃𝑜cos𝜑0) cos𝜑𝑛 + 𝑏(sin𝜃sin𝜑 −
sin𝜃𝑜sin𝜑0 )sin𝜑𝑛} + 𝑛∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}] + ∑ exp [j2π{
𝑁
2𝑛=0
𝑓0
c{𝑎(sin𝜃cos𝜑 −
sin𝜃𝑜cos𝜑0) cos𝜑𝑛 + 𝑏(sin𝜃sin𝜑 − sin𝜃𝑜sin𝜑0 )sin𝜑𝑛} + (𝑁 − 𝑛)∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}]] (7.10)
Taking absolute square of the array factor gives transmit beampattern B(𝑡, 𝑅, 𝜃, 𝜑) of the
proposed TH-EFDA
(a) (b)
Fig 7.2: For an EFDA (N= 16, e = 0.5, Δf= 3 kHz) (a) Range-elevation profile (b) Range –azimuth profile

109
𝐵(𝑡, 𝑅, 𝜃, 𝜑) = |[∑ exp [j2π{𝑁
2𝑛=0
𝑓0
c{𝑎(sin𝜃cos𝜑 − sin𝜃𝑜cos𝜑0) cos𝜑𝑛 + 𝑏(sin𝜃sin𝜑 −
sin𝜃𝑜sin𝜑0 )sin𝜑𝑛} + 𝑛∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}] + ∑ exp [j2π{
𝑁
2𝑛=0
𝑓0
c{𝑎(sin𝜃cos𝜑 −
sin𝜃𝑜cos𝜑0) cos𝜑𝑛 + 𝑏(sin𝜃sin𝜑 − sin𝜃𝑜sin𝜑0 )sin𝜑𝑛} + (𝑁 − 𝑛)∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}]]|
2
(7.11)
We consider a 16-element EFDA operating at the carrier frequency of 10 GHz. Frequency offset
selected is 3 kHz. Fig. 7.2 demonstrates the 3D radiation pattern of an elliptical array with e=0.5,
(a) in range-elevation dimensions and (b) in range azimuth dimensions. Localized maxima can
be seen in both the figures which is in contrast to LFDA where the ‘s’ shaped patterns have
infinite (𝑅, 𝜃) pairs of maximum field. Thus the few narrow maxima of EFDA promise enhanced
source localization.
In order to investigate the EFDA radiation patterns deeply, we first look into the effect of
eccentricity on beampattern parameters i.e. directivity and SLL.
7.2.2 DIRECTIVITY:
Directivity of an array in the direction (𝜃0, 𝜑0) is given by:
𝐷 =4𝜋
∬𝑃𝑛(𝜃,𝜑)𝑑𝛺 (7.12)
where 𝑃𝑛(𝜃, 𝜑) is the normalized power density of the array pattern, and Ω represents the solid
angle. According to [110], if half power beam widths of an array are known, then directivity can
be approximated to
𝐷 =4125∎
𝜃𝐻𝑃°𝜑𝐻𝑃
° (7.13)

110
where
4125∎=number of square degrees in a sphere.
𝜃𝐻𝑃°=HPBW in elevation plane
𝜑𝐻𝑃°= HPBW in azimuth plane
7.2.3 SIDE LOBE LEVELS (SLL):
SLL is defined as the magnitude of the maximum of the largest minor lobe. It is mostly
expressed in dB relative to the major lobe peak .
Fig 7.3 (a-c). shows the radiation pattern of elliptical array with N=16, Δf= 3kHz in elevation
with e=0, e=0.5 and e=0.9 respectively. As the eccentricity is increasing the beam widths are
increasing. However a slight reduction in the SLL can be clearly seen. Along azimuth axis, there
is a slight increase in the beamwidthswhile SLL are nearly the same as in Fig. 7.4(a-c).

111
In Fig. 7.5 (a-c), an obvious effect of increasing eccentricity is observed. The beamwidth in
range is unaffected however a reduction in SLL is significant. The concentration of side lobes
between periodic maximas is significantly reduced. Thus any undesired sources, close to the
target can be effectively suppressed in range with EFDA, in contrast to UCFDA (EFDA with
e=0), where there is a considerable high density of side lobes between periodic maxima. Thus
EFDA can be deemed as the most suitable configuration for range selective applications among
all FDA counterparts. This is clearly witnessed in Fig.7.6. The three patterns are normalized
radiation intensities along range axis, for (a) UCFDA, (b) PFDA (4x4) and (c) EFDA (e=0.9) for
(a) (b)
(c)
Fig 7.3: Radiation pattern of EFDA along azimuthal angle axis with N=16, Δf= 3kHz (a) e=0,
(b) e=0.5, (c) e=0.9
(a) (b)
(c)
Fig 7.4: Radiation pattern of EFDA along elevation angle axis with N=16, Δf= 3kHz (a) e=0, (b)
e=0.5, (c) e=0.9

112
same number of elements i.e. 16, same inter element spacing of 𝜆 2⁄ and same frequency offset of
3kHz. PFDA offers a poor range selectivity, as not only the maximum is wider but side lobes are
widely spread along range axis. For UCFDA , though maxima are narrow but there is a high side
lobe density along the range axis. EFDA outperforms in range axis as the peaks are quite narrow,
with the least side lobe concentration along the range axis. According to Fig.7.6. any interferer,
for example at a range of 75km (with fixed azimuth and elevation angle) will be illuminated by a
radiation of more than 60% of the maximum in case of UCFDA, and 30% of maximum in PFDA
, however a clear null or radiation level of nearly 0% of maximum in case of EFDA is observed.
Now Fig.7.7 (a) summarizes the above discussion graphically. The results are consistent with
[109] where with increasing eccentricity, the directivity decreases. However, side lobe levels are
reduced near e=0.4 and then remain constant with increasing eccentricity. Since the design of
low SLL array systems is a subject of great interest and it has been observed that there is a
tendency of decrease in SLL with increasing eccentricity in EFDA, therefore different global
evolutionary optimization techniques can take advantage of an extra fitness function ‘e’ to
control the SLL.
(a) (b) (c)
Fig 7.5: Radiation pattern of EFDA along range axis with N=16, Δf= 3kHz (a) e=0, (b) e=0.5, (c)
e=0.9

113
Further in depth investigation into the beampttern reveals that the periodicity of pattern in time
and range is the same as in case of LFDA and UCFDA. The periodicity of beampattern in time is
1 ∆𝑓⁄ . This is demonstrated in Fig.7.8(a) where pattern is repeating after every 0.33ms for ∆𝑓 =
3 kHz . Similarly, periodicity of maxima in range is c ∆𝑓⁄ .This is validated in Fig. 7.5 where the
maximum repeats after 100k m for ∆𝑓 = 3 kHz .
(a) (b) (c)
Fig 7.6: Radiation pattern along range axis for N=16, Δf= 3kHz (a) UCFDA (b) PFDA (c)
EFDA(e=0.5)
Fig 7.7: Directivity versus eccentricity in EFDA (b) Side lobe levels in elevation angle versus
eccentricity in EFDA

114
However just like UCFDA, Fig. 7.3.and Fig.7.4. show that the periodicity neither exists along
elevation axis, nor along azimuthal axis. Thus adaptive multi-target detection and multiple null
steering can be facilitated by this feature of UCFDA, as there is no forced repetition of
beampattern after regular angular intervals [99].
7.3 EFDA WITH NON- UNIFORM FREQUENCY OFFSET
Now second part of the chapter deals with EFDA with non-uniform frequency offset. The
function selected is Tangent hyperbolic function. As discussed in Chapter 6, tangent hyperbolic
function ‘tanh(𝛾𝑛)’ exhibits nearly linear behavior when the 𝛾 is small. When 𝛾 increases, the
function becomes more and more non-linear until when 𝛾 reaches infinity, the function becomes
saturated i.e. attains the form of a signum function. Therefore, by employing tangent hyperbolic
function as frequency offset scheme and adjusting parameter 𝛾, there different configurations of
EFDA can be generated. i.e
Fig 7.8: Periodicity of EFDA in time for N=16, Δf= 3kHz.

115
1. For 0 < 𝛾 ≤ 0.1 ;
Function is almost linear resulting in a uniform frequency offset.
TH-EFDA acts as EFDA with UFO
2. For 0.1 < 𝛾 ≤ 1 ;
Function starts getting nonlinear resulting in a non-uniform frequency offset.
TH-EFDA acts as EFDA with NUFO
3. For 𝛾 ≥ 1;
Function approaches a signum function with effectively no frequency offset.
TH-EFDA acts as EPAR.
7.3.1 PROPOSED SYSTEM MODEL
The frequency offset at the nth element is given by
𝑓𝑛 = [𝑓0 + tanh(𝛾𝑛)∆𝑓 ∶ 0 ≤ 𝑛 ≤
𝑁
2
𝑓0 + tanh(𝛾(𝑁 − 𝑛)) ∆𝑓 ∶𝑁
2+ 1 ≤ 𝑛 ≤ 𝑁 − 1
(7.14)
Using the narrowband FDA assumption i.e. tanh [𝛾 (𝑁
2)]∆𝑓 ≪ 𝑓0, the Eq (7.6) can be
approximated to:
𝑆T(𝑡) = exp [−j2π𝑓0 (𝑡 −𝑅
𝑐)] [∑ 𝛼𝑛exp [j2π{
𝑁
2𝑛=0 𝑓0
sin𝜃
c(𝑎cos𝜑 cos𝜑𝑛 + 𝑏sin𝜑 sin𝜑𝑛) +
(tanh(𝛾𝑛))∆𝑓(𝑡 −𝑅
c)}] + ∑ 𝛼𝑛exp [j2π{𝑁−1
𝑛=𝑁
2+1
𝑓0sin𝜃
c(𝑎cos𝜑 cos𝜑𝑛 + 𝑏sin𝜑 sin 𝜑𝑛) +
{tanh(𝛾(𝑁 − 𝑛))}∆𝑓(𝑡 −𝑅
c)}]] (7.15)
Thus the array factor of TH-EFDA can be expressed as:

116
𝐴𝐹(𝑡, 𝑅, 𝜃, 𝜑) =
[∑ 𝛼𝑛exp [j2π{𝑁
2𝑛=0 𝑓0
sin𝜃
c(𝑎cos𝜑 cos𝜑𝑛 + 𝑏sin𝜑 sin𝜑𝑛) + (tanh(𝛾𝑛)) ∆𝑓(𝑡 −
𝑅
c)}] +
∑ 𝛼𝑛exp [j2π{𝑁−1
𝑛=𝑁
2+1
𝑓0sin𝜃
c(𝑎cos𝜑 cos𝜑𝑛 + 𝑏sin𝜑 sin𝜑𝑛) + {tanh(𝛾(𝑁 − 𝑛))}∆𝑓(𝑡 −
𝑅
c)}]]
(7.16)
In order to steer the beam towards a target location (𝑅𝑜 , 𝜃𝑜 , 𝜑𝑜), the complex excitation 𝛼𝑛 for
each element is given by:
𝛼𝑛(𝑅𝑜, 𝜃𝑜 , 𝜑𝑜) =
[exp( j2π[𝑓0
sin𝜃0
𝑐(𝑎cos𝜑0 cos𝜑𝑛 + 𝑏sin𝜑0 sin𝜑𝑛) + (tanh(𝛾𝑛)) ∆𝑓
𝑅0
c] ) ∶ 0 ≤ 𝑛 ≤
𝑁
2
exp( j2π[𝑓0𝑠𝑖𝑛𝜃0
𝑐(𝑎cos𝜑0 cos𝜑𝑛 + 𝑏sin𝜑0 sin𝜑𝑛) + {tanh(𝛾(𝑁 − 𝑛))}∆𝑓
𝑅0
c] ) ∶
𝑁
2+ 1 ≤ 𝑛 ≤ 𝑁 − 1
(7.17)
Re-writing Eq (7.15) with additional phase term:
𝐴𝐹(𝑡, 𝑅, 𝜃, 𝜑) =
[∑ exp [j2π{𝑁
2𝑛=0 𝑓0
(sin𝜃−sin𝜃𝑜)
c{𝑎(cos𝜑 − cos𝜑0) cos𝜑𝑛 + 𝑏(sin𝜑 − sin𝜑0 )sin𝜑𝑛} +
(tanh(𝛾𝑛))∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}] + ∑ exp [j2π{
𝑁
2𝑛=0 𝑓0
(sin𝜃−sin𝜃𝑜)
c{𝑎(cos𝜑 − cos𝜑0) cos𝜑𝑛 + 𝑏(sin𝜑 −
sin𝜑0 )sin𝜑𝑛} + {tanh(𝛾(𝑁 − 𝑛))}∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}]] (7.18)
The transmit beampattern B(𝑡, 𝑅, 𝜃, 𝜑) of the proposed TH-EFDA.
B(𝑡, 𝑅, 𝜃, 𝜑) =
|[∑ exp [j2π{𝑁
2𝑛=0 𝑓0
(sin𝜃−sin𝜃𝑜)
c{𝑎(cos𝜑 − cos𝜑0) cos𝜑𝑛 + 𝑏(sin𝜑 − sin𝜑0 )sin𝜑𝑛} +
(tanh(𝛾𝑛))∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}] + ∑ exp [j2π{
𝑁
2𝑛=0 𝑓0
(sin𝜃−sin𝜃𝑜)
c{𝑎(cos𝜑 − cos𝜑0) cos𝜑𝑛 + 𝑏(sin𝜑 −
sin𝜑0 )sin𝜑𝑛} + {tanh(𝛾(𝑁 − 𝑛))}∆𝑓(𝑡 −𝑅−𝑅𝑜
c)}]]|
2
(7.19)

117
(a)
(b)
Fig 7.9: For N=16, Δf= 30kHz (a) Range-elevation beampattern of TH-EFDA with =
0.03. (b). Range-azimuth beampattern of TH-EFDA with = 0.03.

118
7.3.2 SIMULATIONS, RESULTS AND DISCUSSION:
Here, we simulate the beampattern obtained in Eq (7.18) for target location (300km, 20°, 80°).
The beampattern will be simulated for different values of 𝛾 to validate the configurable behavior
of TH-EFDA as discussed previously. We assume TH-EFDA with 𝑁 = 16 and e= 0.5. Radar
operating frequency is assumed to be 10GHz. Now for 𝛾 = 0.03, and ∆𝑓 =30 kHz beampatterns
are plotted in Fig.7.9.
(a) (b). (c)
(d) (e) (f)
Fig 7.10: For N=16, Δf= 3kHz (a) Range-elevation profile of TH-EFDA = 0.1 (b) Range-elevation profile
of log-EFDA (c) Range-elevation profile of TH-EFDA with = 5. (d) Range-azimuth profile of TH-EFDA
= 0.1 (e) Range-azimuth profile of Log-EFDA (f) Range-azimuth profile of TH-EFDA with = 5.

119
Fig. 7.9a demonstrates range-elevation beampattern, while Fig.7.9b shows range-azimuth profile
of the proposed system. As discussed previously the system behaves as EFDA with uniform
frequency offset. 3D beam steer with localized and periodic maxima can be observed.
For 𝛾 = 0.1 and , ∆𝑓 =3 kHz, TH-EFDA configures as EFDA with NUFO. Fig. 7.10a shows
single maxima at the target location. Thus any undesirable signal source located other than target
location will be effectively suppressed thereby improving system’s SINR .
Fig. 7.10a and Fig. 7.10b compare range-elevation beampatterns of TH-EFDA and Log-EFDA
respectively. Comparison shows quite pronounced off-peak maxima or side lobes in Log-EFDA.
TH-EFDA therefore outsmarts Log-EFDA due to comparatively reduced side lobes. Same
comparison can be witnessed in Fig. 7.10d and Fig. 7.10e.
Now as 𝛾 has been further increased beyond unity i.e. 𝛾 = 5, , ∆𝑓 =3 kHz spatial beampattern of
EPAR is achieved, as shown in Fig. 7.10c and Fig. 7.10f. A slight difference in the beampattern
with that of EPAR is because of the frequency difference between the first element and rest of
the array.
(a) (b) (c)
Fig 7.11: Radiation pattern of TH-EFDA along elevation angle axis with N=16, Δf= 3kHz, = 0.1
(a) e=0, (b) e=0.5, (c) e=0.9

120
Finally effect of eccentricity on radiation pattern of TH-EFDA has been analyzed, with focus on
non-linear region.
In Fig.7.11 (a-c) and 7.12(a-c), it is evident that with increasing eccentricity, beams get wider in
angular dimensions, and side lobes nearly stay constant, however the best part can be observed
along range axis, in Fig.7.13(a-c), where increasing eccentricity doesn’t affect the beam width,
however the side lobe levels experience a fast taper until at e=0.9, where side lobe levels are at
minimum. This is a big advantage for all range selective applications, where any number of
undesired sources located at same angle or different angles but different ranges will be
effectively suppressed.
(a) (b) (c)
Fig 7.12: Radiation pattern of TH-EFDA along azimuthal angle axis with N=16, Δf= 3kHz, = 0.1
(a) e=0, (b) e=0.5, (c) e=0.9

121
(a) (b) (c)
Fig 7.13: Radiation pattern of TH-EFDA along range axis with N=16, Δf= 3kHz, = 0.1 (a) e=0, (b)
e=0.5, (c) e=0.9

122
Chapter 8
CONCLUSIONS AND FUTURE WORK
8.1 CONCLUSIONS.
In this dissertation we have developed new and simple approaches to beamforming in the already
existing geometries in FDA, i.e. LFDA and rectangular arrays normally referred as PFDA.
However the dissertation explores new geometries that stay untouched in FDAs like circular and
elliptical geometries.
In LFDA radars, we devised an implementable cognitive null steering solution. As the frequency
diversity provides extra maneuverability and higher degree of freedom, precise null placement in
angle as well as in range has been achieved which is not possible with PAR systems. DOA
estimation, next location prediction and precise and deepest nulls placement at the estimated next
positions of the interference source are the important features of the proposed scheme. The
unwanted returns from interferer are hence minimized and thus enhanced system performance in
terms of SINR can be promised.
In PFDA radars, we have proposed 3D adaptive transmit beamforming technique, a solution to
conventional 2D localization problems in PAR and LFDA. 3D localized maxima and nulls
promise high SINR of the system, better interference suppression and higher clutter rejection due
to their enhanced range and angle selectivity. The foresaid ABF technique is very fast with least
computational complexity and outperforms other discussed techniques in terms of sharp
localized high gain maxima, deeper nulls and obviously enhanced SINR.
The dissertation further devices “Uniform circular frequency diverse arrays (UCFDA)” for the
first time. The investigation reveals unique patterns, which prove that UCFDA provides much

123
higher capability of target localization as compared to LFDA and PFDA. With this feature, range
dependent clutter and interferences can be suppressed better in UCFDA, thus possibly,
improving received SINR. Hence, all the applications where pin point targets are to be localized,
UCFDA seems to be a better option. Normally, 3D localization of targets is achieved with
PFDAs with 2D rectangular geometry and more number of antennas. This drawback is dispensed
with UCFDA, where sharper localization, better peak to side-lobe ratio, improved directivity and
higher SINR is achieved with simple 1D circular geometry and lesser number (equal to that of
LFDA) of antennas, thus saving space and cost.
Apart from uniform frequency offset, the dissertation further investigates another variant of
UCFDA, which is tangent hyperbolic circular frequency diverse array (TH-CFDA). The
proposed TH-CFDA radar proves to be a highly configurable and simple radar system, where by
adjusting a single system parameter, beampatterns of three different CFDA configurations can be
achieved. This versatility of the proposed approach can be utilized in different practical radar
scenarios. Two of such scenarios are discussed in order to demonstrate the effectiveness of the
proposed system.
Last but not the least, the thesis explores another practical geometry i.e. elliptical array in the
domain of frequency diversity. Investigation reveals that the most outstanding feature of EFDA
(where it outperforms all the existing forms of FDA) is it’s highly range selective beampatterns
with least side lobe levels. A non-uniform frequency offset configuration based on tangent
hyperbolic function i.e. TH-EFDA has also been proposed. This TH-EFDA generates a single
maximum beampattern such that any interferer located other than target location will be
effectively suppressed. TH-EFDA also outsmarts other existing non-uniform frequency offset
schemes in terms of significantly reduced side lobe levels and highly range selective
beampatterns.

124
8.2 FUTURE WORK
For a wide range of radar ABF issues, many areas still remain unexplored in FDA radars.
The frequency offset selection scheme can be extended for 3D multiple null steering.
The UCFDA can further be investigated for null steering and multi-target tracking in an
effort to explore its further capabilities.
Circular frequency diverse array radars with time independency feature are another
avenue to be explored.
Multi ring structures in circular geometry can be explored for better array system
performance especially peak to side lobe ratio.
Machine learning techniques can be employed in conjunction with frequency offset
selection scheme to address multi target beam steering issues.
Although only single signal sources are considered in this work, extension to multi-target
detection can be one of the future research directions.
In EFDA, minimizing SLL using different global evolutionary optimization techniques
with an extra fitness function eccentricity ‘e’ is also one of the future directions.
As PFDA enjoys an extra degree of freedom in terms of frequency offset along x axis and
y axis, a more robust frequency offset selection scheme can be developed to achieve
multiple beams pointing indifferent spatial regions.
Different other configurations of EFDA, for example multiple ellipses along horizontal
axis or multiple ellipses along vertical axis (cylinder like structure) can be studied for a
better array performance results i.e. directivity and SLL.
Planar FDA with time dependent frequency offset may result in a 3D time independent
beampattern. Thus range angle dependent clutter suppression can be achieved more
efficiently.

125
Hybridizing the concepts of waveform diversity with FDA in planar and circular
geometries may lead to new avenues of research in planar frequency diverse MIMO and
circular frequency diverse MIMO.
Planar frequency diverse MIMO with time dependent frequency offsets needs an
exploration.
In non-uniform frequency offset FDA, binomial function as a non-uniform frequency
offset function can be investigated.
Similarly, different other sinusoidal, quadratic and exponential functions can be
reconnoitered as non-uniform frequency offsets.
Several other geometries can be explored in the domain of frequency diversity like
parabolic geometries etc.

126
References
[1] M.I.Skolnik, Introduction to Radar Systems, 3rd ed., Singapore: Mc Graw Hill, 2001.
[2] B.R.Mahafza, Radar Systems Analysis and Design Using MATLAB, Third Edition, Boca
Raton,FL: CRC Press, 2013.
[3] "http://www.nps.navy.mil/faculty/jenn".
[4] "http://www.navsys.com/papers/07-11-002.pdf".
[5] "https://en.wikipedia.org/wiki/Beamforming".
[6] T.Haynes, "A Primer on Digital Beamforming," Spectrum Signal Processing, 1998.
[7] K. R. Mahmoud, M. El-Adawy, S. M. M. Ibrahem, R. Bansal and K. R. Mahmoud, "A
comparison between circular and hexagonal array geometries for smart antenna systems
using particle swarm optimization algorithm," PIER, no. 72, pp. 75-90, 2007.
[8] C.A.Balanis and P.Ioannides, "Uniform Circular and Rectangular Arrays for Adaptive
Beamforming Applications," IEEE Antennas and wireless propagation letters, vol. 4, pp.
351-354, 2005.
[9] C.A.Balanis and P. and, "Uniform circular arrays for smart antennas," IEEE Transactions
on Antennas and Propagation, vol. 47, no. 4, pp. 192-206, 2005.
[10] "http://www.100-jahre-radar.fraunhofer.de/vortraege/Holpp-The_Century_of_Radar.pdf".

127
[11] "http://www.engineersgarage.com/articles/types-of-radars(classification)".
[12] K.Milne, "Phased Arrays in radar," in IEEE Tutorial Meeting on Phased Array Radar,
London, 1989.
[13] Z. Spasojevic, S. Dedeo and R. Jensen, "Dwell Scheduling Algorithms for Phased Array
Antenna," IEEE Trans. Aerospace and Electronic Systems, vol. 49, no. 1, pp. 42-54, 2013.
[14] E. Yoshikawa, T. Ushio, Z. Kawasaki, S. Yoshida, T. Morimoto, F. Mizutani and M.
Wada, "MMSE Beamforminf on fast scanning phased array weather radar," IEEE Trans.
Geoscience and Remote sensing, vol. 51, no. 5, pp. 3077-3088, 2013.
[15] A. Fenn, D. Temme, W. Delaney and W. Courtney, "The Development of Phased Array
rechnology," Lincoln Lab journal, vol. 12, no. 2, pp. 321-340, 2000.
[16] P.Patel, "Fundamentals of phased arrays," Astron, Netherlands Organization of Scientific
Research, Netherlands, 2007.
[17] "www.radartutorial.eu/06.antennas/Phased%20Array%20Antenna.en.html".
[18] P.Ioannides and C. Balanis, "Uniform Circular and Rectangular Arrays for Adaptive
Beamforming Applications," IEEE Antennas and Wireless Propagation Letters, vol. 4, pp.
351-354, 2005.
[19] H.Unz, "Linear arrays with arbitrarily distributed elements," IRE Trans Antennas and
propagation, Vols. AP-8, pp. 222-223, 1960.
[20] D. D. King, R. F. Packard and R. K. Thomas, "Unequally spaced broad band antenna
arrays," IRE Trans Antennas and propagation, Vols. AP-8, pp. 380-385, 1960.
[21] C.Baixiao and W.Jianqi, Synthetic Impulse and Aperture Radar (SIAR): A Novel Multi-

128
Frequency MIMO Radar, 1st ed., Singapore: Wiley and Sons, 2014.
[22] A.Hakam, R.Shubair, S.Jimaa and E.Salahat, "Robust interference suppression using a new
LMS-based adaptive beamforming algorithm," in IEEE Mediterrranian Electrotechnical
Conference, Beirut, 2014.
[23] R.M.Shubair and A.Hakam, "Adaptive beamforming using variable step-size LMS
algorithm with novel ULA array configuration," in IEEE International Conference on
Communication Technology, Guilin, 2013.
[24] J.A.Srar, K.S.Cheng and A.Mansour, "Adaptive Array Beamforming Using a Combined
LMS-LMS Algorithm," IEEE Transactions on Antennas and Propagation, vol. 58, no. 11,
pp. 3545-3554, 2010.
[25] W.Shao, Y.Yu and Z.Qian, "An effective variable step size CS-LMS algorithm for
adaptive beamforming," in International conference on Signal processing Systems, Dalian,
2010.
[26] A.Senapati, K.Ghatak and J. Roy, "A Comparative Study of Adaptive Beamforming
Techniques in Smart Antenna Using LMS Algorithm and Its Variants," in IEEE
International conference on Computational Intelligence and Networks, Bhubaneswar,
2015.
[27] G.Lin, Y.Li and B.Jin, "Research on the algorithms of robust adaptive beamforming," in
International Conference on Mechtronics and Automation, Xi'an, 2010.
[28] R.Qian, M.Sellathurai and D.Wilcox, "A Study on MVDR Beamforming Applied to an
ESPAR Antenna," IEEE Signal Processing Letters, vol. 22, no. 1, pp. 67-70, 2015.
[29] S. Salem, T.S.Kiong, J.K.S.Paw and G.C.Hock, "Artificial immune system assisted
Minimum Variance Distortionless Response beamforming technique for adaptive antenna

129
system," in IEEE International Conference on Convergence, Jeju, 2013.
[30] Y.Wang and A.Tennant, "MVDR beamforming applied to a time-modulated reflector-
array," in Loughborough Antennas and Propagation Conference, Loughborough, 2013.
[31] M.Sharma and K.K.Sharma, "GA-aided MVDR beamforming in wide band MISO wireless
channel," in IEEE International conference on Signal processing and Integrated
Metworks, Noida, 2014.
[32] N.Noordin, V.Zuniga, A.El-rayis, N.Haridas, Ahmet.Erdogan and T.Arslan, "Uniform
circular arrays for phased array antenna," in Loughborough Antennas and Propagation
Conference, Loughborough, 2011.
[33] C.A.Balanis, Antenna Theory,Analysis and Design, 2005.
[34] P.Antonik and M. C. Wicks, "Frequency diverse array with independent modulation of
frequency, amplitude and phase," U.S. Patent 7319427, 15 Jan 2008.
[35] P. Antonik, M. C. Wicks, H. Griffiths and C. J. Baker, "Frequency Diverse Array Radars,"
in IEEE Radar Conference, Verona, NY, 2006.
[36] P. Antonik, M. Wicks, H. Griffiths and C. Baker, "Range Dependent Beamforming Using
Element Level Waveform Diversity," in International Waveform Diversity and Design
Conference, 2006.
[37] P.Antonik and M. C.Wicks, "Method and apparatus for simultaneous synthetic aperture
and moving target indication," U.S.Patent 0129584, June 2008.
[38] M. C. Wicks and P. Antonik, "Method and apparatus for a frequency diverse array,"
U.S.Patent 7511665B2, 31 March 2009.

130
[39] A.Aytun, "Frequency Diverse Array Radars," Master's thesis, Naval Postgraduate School,
2010.
[40] P. Antonik, M. C. Wicks, H. Griffiths and C. J. Baker, "Multi-mission multi mode
waveform diversity," in IEEE Radar Conference, Verona, Italy, 2006.
[41] J. Huang, K. F. Tong, K. Woodbridge and C. Baker, "Frequency diverse Array: Simulation
and Design," in IEEE Radar Conference, Pasadena, USA, 2009.
[42] W. Q. Wang, "―Range-Angle Dependent Transmit Beampattern Synthesis for linear
frequency diverse arrays," IEEE Trans. Antennas and Propagation, vol. 61, no. 08, pp.
4073-4081, 2013.
[43] J. Farooq, M. A. Temple and M. A. Saville, "Exploiting frequency diverse array processing
to improve SAR imaging resolution," in IEEE radar Conf, Rome, Italy, 2008.
[44] W.Q.Wang, "Transmit subaperturing for range and angle estimation in frequency diverse
array radar," IEEE Transactions on Signal Processing, vol. 62, no. 8, pp. 2000-1011, 2014.
[45] W.Wang, "Non-uniform Frequency Diverse Array for Range-Angle Imaging of Targets,"
IEEE Sensors Journal, vol. 14, no. 8, pp. 2469-2476, 2014.
[46] W.Khan and I.M.Qureshi, "Frequency Diverse Array Radar With Time-Dependent
Frequency Offset," IEEE Antennas and Wireless Propagation Letters, vol. 13, pp. 758-
761, 2014.
[47] J.Farooq, "Frequency diversity for improving synthetic aperture radar imaging," PhD
Dissertation, OH,USA, 2009.
[48] J. Farooq, M. A. Temple and M. A. Saville, "Application of frequency diverse arrays to
synthetic aperture radar imaging," in International conference on Electromagnetics,

131
Torino,Italy, 2007.
[49] X.He, B. Liu and D. Wang, "Sparcity-driven frequency diverse MIMO radar imaging for
moving targets," International Journal of Information and Electronics Engineering, vol. 3,
no. 4, pp. 409-413, 2013.
[50] P.F.Sammartino, C.J.Baker and H.D.Griffiths, "Frequency diverse MIMO techniques for
radar," IEEE Trans. Aerospace and Electronic Systems, vol. 49, no. 1, pp. 201-222, 2013.
[51] P.Baizert, T.B.Hale, M.A.Temple and M.C.Wicks, "Forward-looking radar GMTI benefits
using a linear frequency diverse array," IET Electronics Letters, vol. 42, no. 22, pp. 1311-
1312, 2006.
[52] M. Secmen, S. Demir, A. Hizal and T. Eker, "Frequency diverse array antenna with
periodic time modulated pattern in range and angle," in IEEE Radar Conf., 2007.
[53] X.Z.Liu and L. Zhuang, "Precisely beam steering for frequency diverse arrays based on
frequency offset selection," in Proc Int. Radar Conf, 2009.
[54] J. Huang, K.-F. Tong and C.Baker, "Frequency diverse arrays with beam scanning
feature," in IEEE Int. Symposium on Antennas and Propagation, San Diego, USA, 2008.
[55] C.Yong-guang, L. Yun-tao, W. Yan-hong and C. Hong, "Research on the Linear
Frequency Diverse Array Performance," in IEEE 10Th Int Conf on Signal Processing,
Beijing, 2010.
[56] K. Shanbhag, D.Deb and M.Kulkarni, "MIMO radar with spatial frequency diversity for
improved detection performance," in IEEE Int. Communication, Control
Computation,Technology Conf, 2010.
[57] J.Shin, J.H.Choi, J.Kim, J.Yang, W.Lee, J.So and C.Cheon, "Full-wave simulation of

132
frequency diverse array antenna using the FDTD method," in Asia Pacific Microwave
Conference, Seoul, 2013.
[58] W.Khan, I.M.Qureshi and S.Saeed, "Frequency diverse array radar with logarithmically
increasing frequency offset," IEEE Antennas and Wireless Propagation Letters, vol. 14,
2015.
[59] C. a. S.Demir, "Multipath characteristics of frequency diverse arrays over a ground plane,"
IEEE Transactiona on Antennas and propagation, vol. 62, no. 7, pp. 3567-3574, 2014.
[60] T.Eker, S.Demir and A.Hizal, "Exploitation of linear frequency modulation continuous
waveform (LFMCW) for frequency diverse arrays," IEEE Transactions on Antennas and
Propagation, vol. 61, no. 7, pp. 3546-3553, 2013.
[61] Y.B.Wang, W.Q.Wang and H.Z.Shao, "Frequency diverse array radar Cram´er-Rao lower
bounds for estimating direction, range and velocity.," Internal Journal of Antennas and
Propagation, pp. 1-15, 2014.
[62] W.Q.Wang, "Frequency diverse array antenna: New opportunites.," IEEE Antennas and
Propagation Magazine, vol. 57, no. 2, pp. 145-152, 2015.
[63] S.Brady, "Frequency Diverse Array Radar: Signal Characterization and Measurement
Accuracy," MS Thesis, Air Force Institute of Technology, Air University, USA, 2010.
[64] A.M.Jones, "Frequency diverse array receiver architectures," MS thesis, Department of
Electrical Engineeringt and Computer Science, Wright Dtate University, 2011.
[65] W.Q.Wang, "Overview of frequency diverse array in radar and navigation applications,"
IET Radar, Sonar and Navigation, vol. 10, no. 6, pp. 1001-1012, 2016.
[66] J.Xiong, W. Wang, H.shao and H. Chen, "Frequency diverse array transmit beampattern

133
optimization with genetic algoritm," IEEE Antennas and Wireless Propagation Letters, no.
99, p. 1, 2016.
[67] K.Gao, W.Wang and a. J. X. J.Cai, "Decoupled frequency diverse array range–angle-
dependent beampattern synthesis using non-linearly increasing frequency offsets," IET
Microwave Antennas and Propagation, vol. 10, no. 8, pp. 880-884, 2016.
[68] H. Shao, X. Li, W. Wang, J. Xiong and H. Chen, "Time invarant transmit beampattern
synthesis via weight designfor FDA radar," in IEEE Radar Conference 2016, 2016.
[69] S. Qin, Y. D. Zhang and M. G. Amin, "Multi- target Localization using frequency diverse
coprime arrats with coprime frequency offsets," in IEEE Radar Conference 2016, 2016.
[70] Y. Xu, X.Shi, J.Xu and W. Li, "Beampattern analysis of planar frequency diverse array.,"
International Journal of RF and Microwave Computer aided Engineering, vol. 25, no. 5,
pp. 436-444, 2015.
[71] H.Steyskal, "Synthesis of antenna pattern with prescribed nulls," IEEE Transactions on
antennas and Propagation, vol. 30, no. 2, pp. 273-279, 1982.
[72] S.Irteza, E. Schafer, R.Stephan and A. Hornbostel, "Compact antenna array receiver for
robust satellite navigation system," Int.J.Microw. Wirel.Technol., pp. 1-11, 2014.
[73] S.Mehmood, Z.Khan, F.Zaman and B. Shoaib, "Performance analysis of the different null
steering techniques in the field of adaptive beamforming," Research Journal of applied
Siciences, Engineering and Technology, vol. 5, no. 15, pp. 4006-4012, 2013.
[74] D.Baird and G.Rassweiler, "Adaptive sidelobe nulling using digitally controlled phase
shifters," IEEE Transactions on Antennas and Propagaion, vol. 24, no. 5, pp. 638-649,
1976.

134
[75] R.Vescovo, "Null synthesis by phase control for antenna array," IET Electronics Letters,
vol. 36, no. 3, pp. 198-199, 2000.
[76] N.Karaboga, K. Guney and A. Akdagli, "Null steering of linear antenna arrays with use of
modified touring Ant Colony optimization algorithm," Intl. Journal of Microwaves and
Wireless Technologies, vol. 12, no. 4, pp. 4006-4012, 2013.
[77] W.Q.Wang, H.Shao and J.Cai, "Range-angle dependent beamforming by frequency
diverse array antenna," International Journal of Antennas and Propagation, vol. 2012, pp.
1-10, 2012.
[78] S.Haykin, "Cognitive radar, a way of the future," IEEE Signal Processing magazine, vol.
23, no. 1, pp. 30-40, 2006.
[79] X.Zhang and C.Cui, "Range-spread target detecting for cognitive radar based on track-
before-detect.," TnF International Journal of Electronics, vol. 101, no. 1, pp. 74-87, 2014.
[80] N. Ince, E. E. Topuz, E. E. Panayirci and C. C. Isik, Principles of integrated Maritime
Surveillance Systems, Massachusetts,USA: Kluwer Academic Publishers., 2000.
[81] G.Kouemou, Radar Technology, Croatia: InTech Publishers, 2010.
[82] L.Osman, I. Sfar and A. Gharsallah, "The application of high-resolution methods for DOA
estimation using a linear antenna array," International Journal of Microwaves and
Wireless Technologies, vol. 7, no. 1, pp. 1-8, 2014.
[83] B.Islam, "Comparison of Conventional and Modern Load Forecasting Techniques Based
on Artificial Intelligence and Expert Systems.," International Journal of Computer Science
Issues, vol. 8, no. 5, pp. 504-513, 2011.
[84] M.A.Raji and K.Athappilly, "A comparative predictive analysis of neural networks (NNs),

135
nonlinear regression and classification and regression tree (CART) models.," Expert
Systems with Applications, vol. 29, no. 1, pp. 65-74, 2005.
[85] A.S.Bashi and E.J.Kaminsky, "Comparison of Neural Network and Extended Kalman
Filter Determination of Kinematics from Impact Acceleration Tests," in IEEE
International conference on Computational Cybernetics and Simulation., Orlanado,FL,
1997.
[86] F. Awadz, I. Yassin, M. Rahiman, M. Taib and A. Zabidi., "System Identification of
Essential Oil Extraction System Using Non-Linear Autoregressive Model with Exogenous
Inputs (NARX)," in IEEE Control and System Graduate Research Colloquium, Shah
Alam, 2010.
[87] H.Xie, H.Tang and Y.H.Liao, "Time series prediction based on NARX neural networks:
An advanced approach.," in IEEE 8th International conference on Machine learning and
Cybernetics, Boading, 2009.
[88] P.J.Bevelacqua and C. Balanis., "Optimizing antenna geometry for interference
suppression," IEEE Trans. Antennas and Propagation, vol. 55, no. 3, pp. 637-641, 2007.
[89] A.Basit, I.M.Qureshi, W.Khan and S.U.Khan, "Cognitive frequency offset calculation for
frequency diverse array radar," in IEEE International conference on Applied Sciences and
Technology, Bhurban, 2015.
[90] A. M. Jones and B.D.Rigling, "Planar frequency diverse array receiver architecture," in
IEEE Radar Conf, 2012.
[91] A. B. Gershman, E. Németh and J. F. Böhme, "Experimental Performance of Adaptive
Beamforming in a Sonar Environment with a Towed Array," IEEE Transactions on SIgnal
Processing, vol. 48, no. 1, pp. 246-250, 2000.

136
[92] H.Shao, J. Li, H.Chen and W. Wang, "Adaptive frequency offset selection in FDA radar,"
IEEE antennas and wireless propagation letters, vol. 13, pp. 1405-1408, 2014.
[93] J.A.Tsai and B. Woerner, "Adaptive beamforming of uniform circular arrays (UCA) for
wireless CDMA system," in IEEE Signals, Systems and Computer Conference, Pacific
Grove, CA, USA, 2001.
[94] W.Lei, "Blind adaptive beamforming for wideband circular arrays," in IEEE International
Conference on Acoustics, Speech and Signal Processing, Taipei, 2009.
[95] A.R.Khulaib, R.M.Shubair, M.A.Al-Qutayri and N.G.JWP, "Performance evaluation of
linear and circular arrays in wireless sensor localization," in IEEE International
Conference on Electronics, Circuits and Systems, Beirut, 2011.
[96] T.B.Chen, Y.L.Dong, Y. Jiao and F.S.Zhang, "Synthesis of circular antenna array using
partcle swarm optimization algorithm," Journal of Electromagnetic Waves and
Applications, vol. 20, no. 13, pp. 1785-1795, 2006.
[97] P.Antonik, "An Investigation of a Frequency Diverse Array," PhD Thesis, London, 2009.
[98] M.Feldmann, U.Nickel and W.Koch, "Adaptive air to air target tracking in severe jamming
environment," in 14th International Conference on information fusion, 2011.
[99] S.Saeed, I.M.Qureshi, W.Khan and A.Salman, "An investigation into uniform circular
frequency diverse array (UCFDA) radars.," Remote Sensing Letters, vol. 6, no. 9, pp. 707-
714, 2015.
[100] W.Q.Wang and H.Shao, "Range-angle localization of targets by a double pulse frequency
diverse array radar," IEEE Journal of selected topics in signal processing, vol. 8, no. 1, pp.
106-114, 2014.

137
[101] B.R. Jackson, S. Rajan, B.J. Liao and S. Wang, "Direction of arrival estimation using
directive antennas in uniform circular arrays," Ieee Transactions on Antennas and
Propagation, vol. 63, no. 2, pp. 736-747, 2015.
[102] S.Astapov, J. Berdnikova and J.S. Preden, "A two stage approach to 2D DOA estimation
for a compact circular microphone array," in International Conference on Informatics,
Electronics and Vision, 2015.
[103] M.I. AlHajri, R.M. Shubair, L. Weruaga, A.R. Kulaib, A. Goian, M. Darweesh and R.
AlMemari, "Hybrid method for enhanced detection of coherent signals using circular
antenna arrays," in IEEE National Symposium on Antennas and Propagation &
USNC/URSI, 2015.
[104] R.Bera and J.S.Roy, "Optimization of thinned elliptical antenna arrays using Particle
Swarm Optimization," in International Conference on Communications, Devices and
Intelligent systems, Kolkata, 2012.
[105] Z. G, "Gain enhancement of printed log-periodic dipole array antenna using an elliptical
patch," in IEEE 4th Asia Pacific Conference on Antennas and Propagation, 2015.
[106] M.A.baumgartner, M.T.Ghasr and R.Zoughi, "Wideband Imaging Array Using
Orthogonally Fed Dual Varactor-Loaded Elliptical Slots," IEEE Transactions on
Instrumentation and Measurement, vol. 64, no. 3, pp. 740-749, 2015.
[107] A.Sharaqa and N.Dib, "Position-Only Side Lobe Reduction Of A Uniformly Excited
Elliptical Antenna Array Using Evolutionary Algorithms," IET Microwaves ,Antennas and
Propagation, vol. 7, no. 6, pp. 452-457, 2013.
[108] B. L, N. Carvalho and P. P, "Circular Polarized Planar Elliptical Array," in European
Conference on Antennas and Propagation, 2013.

138
[109] R. A.Sadeghzadeh, A. A. L. Neyestanak, Naser-Moghadasi and Ghiamy, "A Comparison
of Various Hybrid Elliptical Antenna Arrays," Iranian Journal of Electrical and Computer
Engineering, vol. 7, no. 2, 2008.
[110] J.D.Kraus, R.J.Marhefka and A.S.Khan., Antennas for all applications, New York: Mc
Graw Hill Companies ,Inc., 2002.
[111] W. Muller, Ground Radar Systems of the German Luftwaffe to 1945, Atglen, PA: Schiffer
Publishing Ltd., 1998.
[112] H.Steyskal, "Simple method for pattern nulling by phase perturbation.," IEEE
Transactions in Antennas and propagation, vol. 31, no. 1, pp. 163-166, 1983.
[113] "http://www.radartutorial.eu/19.kartei/pic/img2061.jpg(ATC".
[114] "http://mostlymissiledefense.com/2012/04/12/pave-paws-and-bmews-radars-april-12-
2012".
[115] "http://wtlab.iis.u-tokyo.ac.jp/~wataru/lecture/rsgis/rsnote/cp3/cp3-7.htm".

139


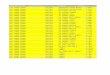










![QSVV Radars TR[1]](https://img.dokumen.tips/doc/110x75/5571fa964979599169929322/qsvv-radars-tr1.jpg)






![UWB Radars [EDocFind.com]](https://img.dokumen.tips/doc/110x75/577d2b9c1a28ab4e1eaae39f/uwb-radars-edocfindcom.jpg)