Embed Size (px)
Citation preview
Full Terms & Conditions of access and use can be found athttp://www.tandfonline.com/action/journalInformation?journalCode=lsst20
Download by: [University of Western Ontario] Date: 25 January 2017, At: 09:24
Separation Science and Technology
ISSN: 0149-6395 (Print) 1520-5754 (Online) Journal homepage: http://www.tandfonline.com/loi/lsst20
APPLICATION OF EXTENDED KALMAN FILTER TO ABATCH COOLING CRYSTALLIZER
W. Xie & S. Rohani
To cite this article: W. Xie & S. Rohani (2001) APPLICATION OF EXTENDED KALMAN FILTER TOA BATCH COOLING CRYSTALLIZER, Separation Science and Technology, 36:13, 3049-3069, DOI:10.1081/SS-100107645
To link to this article: http://dx.doi.org/10.1081/SS-100107645
Published online: 15 Feb 2007.
Submit your article to this journal
Article views: 23
View related articles
Citing articles: 3 View citing articles

APPLICATION OF EXTENDED KALMANFILTER TO A BATCH COOLING
CRYSTALLIZER
W. Xie and S. Rohani*
Department of Chemical and Biochemical Engineering,University of Western Ontario, London,
Ontario N6A 5B9, Canada
ABSTRACT
The application of the extended Kalman filter (EKF) to a batchcooling crystallization process is presented. The simulation resultspoint out that the feasibility of the on-line application of this non-linear state estimation technique to a noisy nonlinear system heav-ily depends on the accurate measurement of the crystallizer tem-perature and the dissolved solute concentration. The EKF canreduce the effect of significant amounts of random noise in themeasurements.
Key Words: Extended Kalman filter; Batch cooling crystallizer;Simulation study
SEPARATION SCIENCE AND TECHNOLOGY, 36(13), 3049–3069 (2001)
Copyright © 2001 by Marcel Dekker, Inc. www.dekker.com
3049
*Corresponding author. E-mail: [email protected]

ORDER REPRINTS
INTRODUCTION
The implementation of modern control theory requires knowledge of thestate variable values in the system of interest. In many process situations, due tothe lack of complete measurements of the states, state estimation problems arecommon.
In 1960, Kalman (1) first developed an optimal, sequential, discrete-time es-timation technique. A year later, Kalman and Bucy derived maximum likelihoodestimates of measured and unmeasured process states (2). This approach combinedthe information from a mathematical model of the process with actual process mea-surements. Since then, many theoretical and applied extensions of state identifica-tion have been presented. The extended Kalman filter (EKF), as an approximatefilter for nonlinear systems, was applied by Gavalas and Seinfeld (3) to tubular re-actors, by Seinfeld (4) to a continuous stirred tank reactor (CSTR) with a first-order exothermic reaction, by Wells (5) to a 6-dimension nonlinear well-stirred re-actor, and by Wismer and Wells (6) to the basic oxygen furnace. Coggan and Wil-son (7) demonstrated the applications of the Kalman sequential estimator to in-dustrial processes for on-line state estimation. In Hamilton, Seborg, and Fisher (8),simulation and experimental studies were carried out for the comparison of theKalman filter with an exponential filter. In 1986, Jang, Joseph, and Muka (9) com-pared the EKF approach with the horizon approach to the on-line parameter andstate estimation of the nonlinear systems of Seinfeld (4). Simultaneous state andparameter identification was successfully presented by Stephanopoulos and San(10) and San and Stephanopoulos (11) in a biochemical reactor. Ramirez (12)showed the advantages of coupling a sequential parameter identification algorithmwith the Kalman filter state identification algorithm in a batch fermentation pro-cess. The EKF as a state estimator was employed by Dimitratos et al. (13) for anemulsion copolymerization reactor and by Kozub and Macgregor (14) for semi-batch polymerization reactors. Myers and Luecke (15) described an efficient newalgorithm of the EKF. This new algorithm exploited the decoupled nature of thestate estimate and error covariance equations along with the symmetry of the errorcovariance matrix. Lee and Ricker (16) illustrated the EKF-based nonlinear-modelpredictive control technique using successive linearization. Recently, Ahn, Park,and Rhee (17) successfully applied the EKF-based nonlinear-model predictivecontrol for a continuous methyl methacrylate (MMA) polymerization reactor.Jazwinski (18) and Gelb (19) present 2 good books that discuss the theory of fil-tering and the applications of optimal estimation in detail.
The objective of this study was to find a useful way to overcome the majorobstacles of the lack of direct on-line measurements in the batch cooling crystal-lization process and make the implementation of the advanced-model based con-trol strategies possible.
In this study, the standard algorithm of the EKF is presented. The possibil-ity of EKF application as a nonlinear estimator of the batch cooling crystallizationprocess is discussed. We found that crystallizer temperature and dissolved solute
3050 XIE AND ROHANI

ORDER REPRINTS
concentration are critical measurements that determine the feasibility of EKF ap-plication to a batch cooling crystallizer.
ALGORITHM OF THE EKF
The EKF is a recursive state estimator providing minimum-variance stateestimation. To develop the EKF, one should formulate a dynamic model of thesystem as a set of ordinary differential equations with the observation equations:
x· � ƒ (x,t) � w(1)
Zk � h(xk) � vk
where, x is the state variable; Zk is the measured output; w is the process error; andvk describes the measurement error. Both are uncorrelated zero-mean Gaussiannoise processes with covariance matrix Q and Rk, respectively. Because the pro-cess is continuous and the system outputs are discrete, as measured at samplingtimes, the model is defined in the continuous-discrete form.
The EKF is comprised of 2 recursive update stages: the model-based updatestage and the measurement-based update stage.
Model-Based Update Stage
Based on the model, the estimates of the new states are updated over thetime interval from k � 1 to k in the absence of new measurements. In this stage,the predictions of xk(–) and P(�), used in the measurement-based update stage, arecalculated.
x.(t) � ƒ(x,t)
(2)x(0) � x0
P(t) � F(x,t) P(t) � P(t) F T (x,t) � Q(t)(3)
P(0) � P0
where, P is the derivative of the state error covariance matrix; x0 is the initial statewith the error covariance P0; F is the Jacobian matrix of ƒ defined by
F(x,t) � ����ƒx��x�x
(4)
Measurement-Based Update Stage
Once the new measurements become available, corrections to the estima-tions xk(–) and Pi(�) are made by minimizing the estimation error. These cor-rected estimations are represented by xk(�) and Pi(�), respectively.
KALMAN FILTER APPLICATION 3051

ORDER REPRINTS
3052 XIE AND ROHANI
xk(�) � x(�) � Kk {Zk � h [x(�)]} (5)
Pk(�) � {I � KkHk [xk (�)]} Pk(�) (6)
where, Hk is the Jacobian matrix of h
Hk [xk(�)] � ����hx��x�x (�)
(7)
and Kk is the Kalman gain matrix
Kk � Pk(�) HkT [xk(�)]{Hk [xk(�)] Pk(�) Hk
T [xk(�)] � Rk}�1 (8)
At each integration step, solution of the EKF equations starts with integra-tion of the model-based state estimate (Eq. 2) and the model-based state-error co-variance (Eq. 4) through the use of the fourth-order Runge-Kutta method. Basedon the new available measurements, corrections of the new predictions are thencalculated through Eqs. (5) and (6).
SIMULATION STUDIES AND DISCUSSION
The EKF was used as an on-line nonlinear estimator to both provide esti-mates for the unmeasured states and to reduce the effect of measurement noise inthe batch cooling crystallization process. The development of the dynamic modelfor the batch cooling crystallizer model is discussed in detail by Xie, Rohani, andPhoenix (20). The state space form of the model is given by
x � ƒ(x) (9)
where
xT � [x1 ��� x8] � [Tc Tj C mN,0 mN,1 mN,2 mN,3 Ls]
ƒ(x) � �
�UA(x1 � x2) � 3W�H�ckvG(Nsx2
8 � x6)
Wcpw (1 � x3) � W�ckvcpc (Nsx38 � x7)
�FV
w
j� (Tj,in � x2) � �
�w
UVj
Acpw� (x1 � x2)
�3�ckvG(Nsx28 � x6)
Bx4G2x5G3x6GG
ƒ1(x)ƒ2(x)ƒ3(x)ƒ4(x)ƒ5(x)ƒ6(x)ƒ7(x)ƒ8(x)

ORDER REPRINTS
KALMAN FILTER APPLICATION 3053
where the subscript T represents the transpose of a matrix; Tc is the crystallizertemperature; Tj is the inside cooling jacket temperature; Tj,in is the inlet coolingjacket temperature; C is the dissolved solute concentration; mN,0, mN,1, mN,2, andmN,3 are the first 4 leading moments of the newly generated crystals; Ls is the sizeof the seed crystals; and B and G are the nucleation and growth kinetics of thecrystallization as deduced by Tavare and Garside (21). Table 1 gives the physicaland kinetic parameters of the potash-alum-water system used in the simulationstudy.
The normalized model of the batch cooling crystallizer is derived by substi-tuting the normalized state variables into the original model of Eq. (9).
Z1 � Tc / Tc,max Z2 � Tj / Tj,max Z3 �C / Cmax
Z4 � m0,N / m0,N,max Z5 � m1,N / m1,N,max
Z6 � m2,N / m2,N,max Z7 � m3,N / m3,N,max Z8 � Ls / Ls,max � t/tf
The resulting equation is
Z � ƒ(Z) (10)
where
ƒ1 � �Tc
t
,
ƒ
max�
ƒ2 � ��FV
w
j� (Tj,in � Tj,max Z2) � �
�w
UVj
Acpw� (Tc,max Z1 � Tj,max Z2)� �
Tj,
t
m
ƒ
ax�
ƒ3 � {�3�ckvG [Ns(Ls,max Z8)2 � m2,N,max Z6]} �C
t
m
ƒ
ax�
�UA(Tc,max Z1 � Tj,max Z2) � 3W�H�ckvG [Ns (Ls,max Z8)2 � m2,N,max Z6]
�����Wcpw (1 � CmaxZ3) � W�ckvcpc
[Ns (Ls,max Z8)3 � m3,N,max Z7]
Table 1. The Operating Conditions and the Physical Properties of the Potash-Alum-Water System.
Initial Saturation Temperature 45°C � c 1760 kg/m3 crystalInitial temperature 40°C kv 1Stirrer speed 13.2 rps U�A 800 J/°C�sWs 10 g � H 44.5 kJ/kg crystal(23)� Ls 10 �m cp,c 0.84 kJ/°C�kg crystalLs0 150 �m cp,s 3.8 kJ/°C�kg solutionCrystallizer volume 27 L Batch time 4600 secondsG(t) � kgR2.76� C 0.765 m/s, where �C � C � C*, kg � 1.25 10�9
B(t) � kbMTG1.88 no./ kg solvent�s; kb � 5.0 1018
C* � a0 � a1[Tc (t) � 273.15] � a2 [Tc (t) � 273.15]2 kg solute/ kg solvent (24); a0
� 6.063 10�2, a1 � 9.584 10�4, a2 � 5.85 10�5.

ORDER REPRINTS
3054 XIE AND ROHANI
ƒ4 � B �m0,N
tƒ,max�
ƒ5 � m0,N,max Z4G �m1,N
tƒ,max�
ƒ6 � 2m1,N,max Z5G �m2,N
tƒ,max�
ƒ7 � 3m2,N,max Z5G �m3,N
tƒ,max�
ƒ8 � G �Ls
t
,m
ƒ
ax�
And the measured output is defined by
yk � hk (Z) � vk � � vk (11)
The Jacobian matrix of F and H may be obtained by computing the partialderivatives with respect to each normalized state variables (see the Appendix).
F(t, Z(t)) �
Z�Z (t)
(12)
H(t,Z(t)) �
Z�Z (t)
(13)
In the following section, we discuss the strategy of selecting measured vari-ables and their influence on the performance of the EKF in a potash-alum batchcooling crystallizer. All measurements used are assumed to be sampled at an in-terval of 1 second and to be corrupted with Gaussian noise with a zero mean. Xieet al. (20) considered the performance of the EKF in the presence of mismatch (nu-cleation and growth kinetics constants) between the process model and the plant.
First, crystallizer temperature is chosen as the only measured variable be-cause it can be measured conventionally and on-line. Based on the measurementof crystallizer temperature, other important state variables are estimated by theEKF.
Figures 1–7 show the tracking of each estimated state. Figure 1 shows thatthe EKF gives a very good prediction for the inside cooling-jacket temperature.
001
010
000
��
�
ƒx1
1�…�
�
�
ƒx8
1�
� �
��
�
ƒx1
8�…�
�
�
ƒx8
8�
Z1k
Z2k
Z3k

ORDER REPRINTS
KALMAN FILTER APPLICATION 3055
Figure 1. Inside cooling-jacket temperature and its estimation based on the measurementof crystallizer temperature.
Figure 2. Dissolved solute concentration and its estimation based on the measurement ofcrystallizer temperature.

ORDER REPRINTS
3056 XIE AND ROHANI
Figure 3. Zero moment of the newly generated crystals and its estimation based on themeasurement of crystallizer temperature.
Figure 4. First moment of the newly generated crystals and its estimation based on themeasurement of crystallizer temperature.

ORDER REPRINTS
KALMAN FILTER APPLICATION 3057
Figure 5. Second moment of the newly generated crystals and its estimation based on themeasurement of crystallizer temperature.
Figure 6. Third moment of the newly generated crystals and its estimation based on themeasurement of crystallizer temperature.

ORDER REPRINTS
3058 XIE AND ROHANI
The results are derived from the direct relationship between crystallizer tempera-ture (the measurement) and inside cooling-jacket temperature (see ƒ2 in Eq. 9).Figure 2 demonstrates that the estimation of dissolved solute concentration canfollow its actual value without offset at the end of the batch time. In batch coolingcrystallization, supersaturation is represented by the difference between dissolvedsolute concentration and equilibrium concentration. Supersaturation is generatedby reducing the solubility of the dissolved solute with a decrease of crystallizertemperature. The solubility equation [C*(Tc)] in Table 1 gives a one-to-one rela-tionship between crystallizer temperature and equilibrium concentration. So, anindirect but strong relationship exists between dissolved solute concentration andcrystallizer temperature, which results in good convergence. The other states, suchas the first 4 leading moments of the newly generated crystals and size of the seedcrystals, have weak relationships with the crystallizer temperature. Moreover, theimplementation of the EKF requires the linearization (by first-order Taylor seriesexpansion) of the model at current estimated states, which eliminates some im-portant information. Therefore, the predictions of these states are not very good.Figures 3–7 show that the predictions contain oscillations at the beginning andoffset at the end.
Figure 7. Size of the seed crystals and its estimation based on the measurement of crys-tallizer temperature.
ORDER REPRINTS
KALMAN FILTER APPLICATION 3059
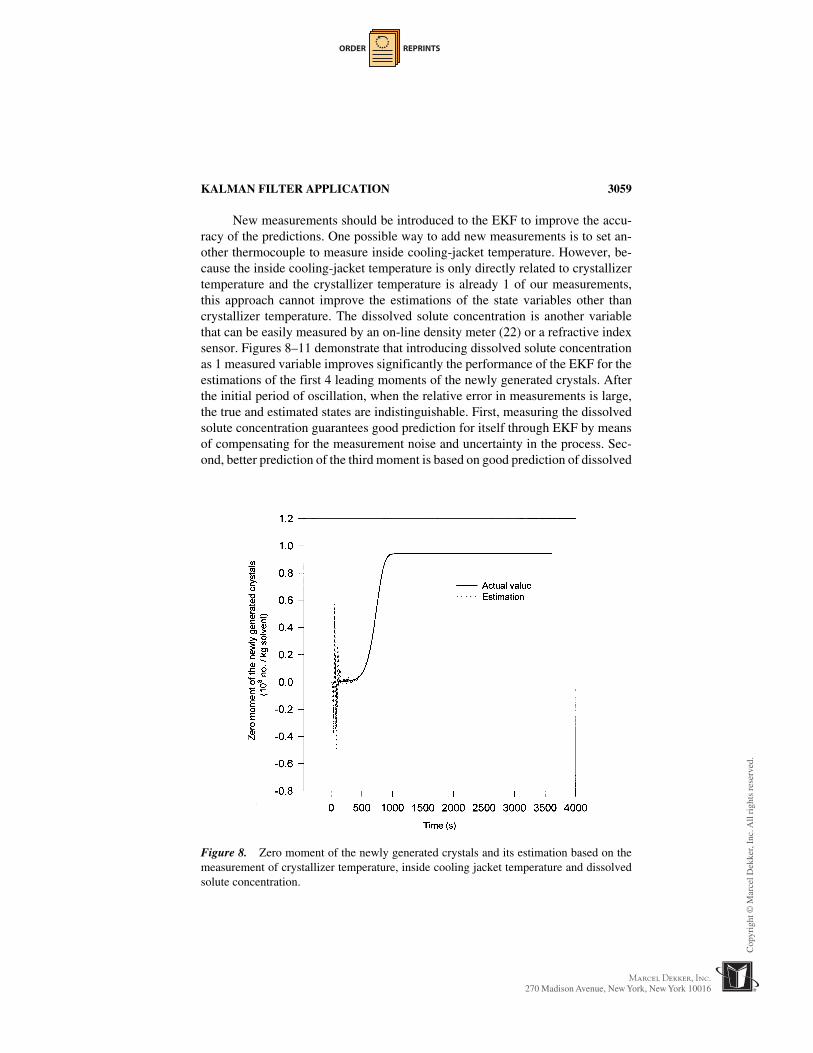
New measurements should be introduced to the EKF to improve the accu-racy of the predictions. One possible way to add new measurements is to set an-other thermocouple to measure inside cooling-jacket temperature. However, be-cause the inside cooling-jacket temperature is only directly related to crystallizertemperature and the crystallizer temperature is already 1 of our measurements,this approach cannot improve the estimations of the state variables other thancrystallizer temperature. The dissolved solute concentration is another variablethat can be easily measured by an on-line density meter (22) or a refractive indexsensor. Figures 8–11 demonstrate that introducing dissolved solute concentrationas 1 measured variable improves significantly the performance of the EKF for theestimations of the first 4 leading moments of the newly generated crystals. Afterthe initial period of oscillation, when the relative error in measurements is large,the true and estimated states are indistinguishable. First, measuring the dissolvedsolute concentration guarantees good prediction for itself through EKF by meansof compensating for the measurement noise and uncertainty in the process. Sec-ond, better prediction of the third moment is based on good prediction of dissolved
Figure 8. Zero moment of the newly generated crystals and its estimation based on themeasurement of crystallizer temperature, inside cooling jacket temperature and dissolvedsolute concentration.

ORDER REPRINTS
Figure 9. First moment of the newly generated crystals and its estimation based on themeasurement of crystallizer temperature, inside cooling jacket temperature, and dissolvedsolute concentration.
Figure 10. Second moment of the newly generated crystals and its estimation based onthe measurement of crystallizer temperature, inside cooling jacket temperature, and dis-solved solute concentration.

ORDER REPRINTS
KALMAN FILTER APPLICATION 3061
solute concentration (see ƒ3 in Eq. 9). Third, good estimation of the third momentguarantees the accurate prediction of other moments possible by the intrinsic linkbetween moments.
In both systems discussed above, the effect on predictions of an addition of10% Gaussian noise to the measurements, due to the good filtering capability ofthe EKF, was reduced significantly.
CONCLUSIONS
In this study, the EKF as a nonlinear estimator for a batch cooling crystal-lization system was investigated. The feasibility of application of the EKF in thebatch cooling crystallization process heavily relied on the accurate on-line mea-surement of crystallizer temperature and dissolved solute concentration. Slowconvergence from poor initial state estimates was found, which mainly resultedfrom the recursive nature of the algorithm. The EKF could compensate for the in-fluence of the Gaussian noise in the measurement. Good prediction of the unmea-
Figure 11. Third moment of the newly generated crystals and its estimation based on themeasurement of crystallizer temperature, inside cooling jacket temperature, and dissolvedsolute concentration.
ORDER REPRINTS
3062 XIE AND ROHANI
sured variables provided by the EKF could facilitate the implementation of mod-ern control theory in noisy nonlinear systems such as a batch cooling crystalliza-tion process.
APPENDIX: THE JACOBIAN MATRIX
F(t, Z(t)) �
Z�Z (t)
where� ƒ1 /� Z1 � {�UA Tc,max � 2.295W� H�ckvkg R2.67[Ns(Ls,maxZ8)2
� m2,N,maxZ6] {� [a1Tc,max � 2a2(Tc,maxZ1
� 273.15)Tc,max] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] � [a0 � a1(Tc,maxZ1 � 273.15)� a2(Tc,maxZ1 � 273.15)2]
[�a1Tc,max � 2a2(Tc,maxZ1 � 273.15)Tc,max] / {[1 � a0
� a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] 2}} /{{Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2]} / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]0.235}} tƒ / {{Wcpw(1 � Z3Cmax) � W�ckvcpc[Ns(Ls,maxZ8)3 � m3,N,maxZ7])}Tc,max};
� ƒ1 /� Z2 � UA Tj,maxtf / {{Wcpw(1 � Z3Cmax) � W�ckvcpc[Ns(Ls,maxZ8)3
� m3,N,maxZ7]}Tc,max}� ƒ1 /� Z3 � � 2.295W� H�ckvkg R2.67[Ns(Ls,maxZ8)2 � m2,N,maxZ6]Cmaxtf
/{ {Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.235{Wcpw(1 � Z3Cmax) � W�ckvcpc[Ns(Ls,maxZ8)3 � m3,N,maxZ7]}Tc,max � {� UA (Tc,maxZ1 � Tj,maxZ2) � 3W� H�ckvkg R2.67{Z3Cmax �[a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] /[1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 �273.15)2]}0.765 [Ns(Ls,maxZ8)2 � m2,N,maxZ6]}tf WcpwCmax /{{Wcpw(1 � Z3Cmax) � W�ckvcpc[Ns(Ls,maxZ8)3
� m3,N,maxZ7]}2Tc,max};� ƒ1 /� Z4 � 0; �ƒ1 /� Z5 � 0;� ƒ1 /� Z6 � �3 W� H�ckvkg R2.67{Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15)
� a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15)
��
�
ƒx1
1�…�
�
�
ƒx8
1�
� �
��
�
ƒx1
8�…�
�
�
ƒx8
8�
ORDER REPRINTS
KALMAN FILTER APPLICATION 3063
� a2(Tc,maxZ1 � 273.15)2]}0.765 m2,N,max tf / {Wcpw(1 � Z3Cmax) � W�ckvcpc[Ns(Ls,maxZ8)3 � m3,N,maxZ7)]2Tc,max};
� ƒ1 /� Z7 � �{� UA (Tc,maxZ1 � Tj,maxZ2) �3W� H�ckvkg
R2.67(Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2]/[1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2]}0.765 [Ns(Ls,maxZ8)2 � m2,N,maxZ6)]tf W�ckvcpcm3,N,max / {{Wcpw(1 � Z3Cmax) � W�ckvcpc[Ns(Ls,maxZ8)3 � m3,N,maxZ7]}2Tc,max};
� ƒ1 /� Z8 � �6W� H�ckvkg R2.67{Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15)� a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15)� a2(Tc,maxZ1 � 273.15)2]}0.765 NsLs,max
2Z8tf / {{Wcpw(1 � Z3Cmax) � W�ckvcpc[Ns(Ls,maxZ8)3 � m3,N,maxZ7]}2Tc,max}� 3[ � UA (Tc,maxZ1 � Tj,maxZ2) � 3W� H�ckvkg
R2.67{Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2]}0.765 [Ns(Ls,maxZ8)2 � m2,N,maxZ6)]tf W�ckvcpcNsLs,max
3Z82 / {{Wcpw(1 � Z3Cmax) � W�ckvcpc
[Ns(Ls,maxZ8)3 � m3,N,maxZ7]}2Tc,max}� ƒ2 /� Z1 � UA Tc,max tf / (�cVjcpwTj,max);� ƒ2 /� Z2 � �Tj,maxFw / Vj � UA tf / (� Vjcpw);� ƒ2 /� Z3 � 0; �ƒ2 /� Z4 � 0; �ƒ2 /� Z5 � 0; �ƒ2 /� Z6 � 0; �ƒ2 /� Z7 � 0;
�ƒ2 /� Z8 � 0� ƒ3 /� Z1 � �2.295�ckvkgR2.67[Ns(Ls,maxZ8)2 � m2,N,maxZ6]tf
{�[a1Tc,max � 2a2(Tc,maxZ1 �273.15)Tc,max] / [1 � a0
� a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] � [a0
� a1(Tc,maxZ1 �273.15) � a2(Tc,maxZ1 � 273.15)2] [�a1Tc,max � 2a2(Tc,maxZ1 � 273.15)Tc,max] / {[1 � a0
� a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]2}} /{{Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2]}0.235Cmax}� ƒ3 /� Z2 � 0;� ƒ3 /� Z3 � �2.295�ckvkgR2.67[Ns(Ls,maxZ8)2�m2,N,maxZ6]tf / {{Z3Cmax
� [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] /[1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2]}0.235}� ƒ3 /� Z4 � 0; �ƒ3 /� Z5 � 0;� ƒ3 /� Z6 � �3�ckvkgR2.67{Z3Cmax � [a0 � a1(Tc,maxZ1�273.15)
� a2(Tc,maxZ1 � 273.15)2 ] / [1 � a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.765m2,N,max tf / Cmax
� ƒ3 /� Z7 � 0;
ORDER REPRINTS
3064 XIE AND ROHANI
� ƒ3 /� Z8 � �6�ckvkgR2.67{Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2 ] / [1 � a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.765NsLs,max2Z8 tf /
Cmax
� ƒ4 /� Z1 � 1.43820kb�ckv[Ns(Ls,maxZ8)3 � m3,N,maxZ7]{kgR2.67{Z3Cmax
[a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1� a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2]}0.765}0.88tf kbR2.67{� [a1Tc,max � 2a2(Tc,maxZ1
� 273.15)Tc,max] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] � [a0 � a1(Tc,maxZ1 � 273.15) � � a2(Tc,maxZ1 � 273.15)2]{� [a1Tc,max � 2a2(Tc,maxZ1
� 273.15)Tc,max] / {[1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]2}} / {m0,N,max{Z3Cmax � [a0
� a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1 � a0
� a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.235}� ƒ4 /� Z2 � 0;� ƒ4 /� Z3 � 1.43820kb�ckv[Ns(Ls,maxZ8)3 � m3,N,maxZ7]{kgR2.67{Z3Cmax
[a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1� a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2]}0.765}0.88tf kgR2.67Cmax / {m0,N,max{Z3Cmax � [a0
� a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1 � a0
� a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.235}� ƒ4 /� Z4 � 0; �ƒ4 /� Z5 � 0; �ƒ4 /� Z6 � 0;� ƒ4 /� Z7 � kb�ckv m3,N,max{kgR2.67{Z3Cmax � [a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2]/ [1 � a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.765}1.88tf / m0,N,max
� ƒ4 /� Z8 � 3 kb�ckvNsLs,max3Z8
2(kgR2.67{Z3Cmax � [a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2]/ [1 � a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.765}1.88tf / m0,N,max
� ƒ5 /� Z1 � 0.765m0,N,maxZ4kgR2.67tf{� [a1Tc,max � 2a2(Tc,maxZ1
� 273.15)Tc,max] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] � [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]*[� a1Tc,max � 2a2(Tc,maxZ1
� 273.15)Tc,max] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] / {{Z3Cmax � [a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.765}0.235m1,N,max}� ƒ5 /� Z2 � 0;� ƒ5 /� Z3 � 0.765 m0,N,maxZ4 kgR2.67tf Cmax / {{Z3Cmax � [a0
� a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2]}0.235m1,N,max}

ORDER REPRINTS
KALMAN FILTER APPLICATION 3065
� ƒ5 /� Z4 � m0,N,max kgR2.67 {Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15)� a2(Tc,maxZ1 � 273.15)2]}0.765 tf / m1,N,max
� ƒ5 /� Z5 � 0; �ƒ5 /� Z6 � 0; �ƒ5 /� Z7 � 0; �ƒ5 /� Z8 � 0;� ƒ6 /� Z1 � 1.530 m1,N,maxZ5 kgR2.67tf {� [a1Tc,max � 2a2(Tc,maxZ1
� 273.15)Tc,max] [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] � [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2][� a1Tc,max � 2a2(Tc,maxZ1
� 273.15)Tc,max] / {[1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]2}} / {{Z3Cmax � [a0 �a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1 � a0
� a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.235
m2,N,max};� ƒ6 /� Z2 � 0;� ƒ6 /� Z3 � 1.530 m1,N,maxZ5 kgR2.67tf Cmax /{{Z3Cmax � [a0
� a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2]}0.235 m2,N,max};� ƒ6 /� Z4 � 0;� ƒ6 /� Z5 � 2 m1,N,maxkgR2.67 {Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15)
� a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15)� a2(Tc,maxZ1 � 273.15)2]}0.765tf / m2,N,max;
� ƒ6 /� Z6 � 0; �ƒ6 /� Z7 � 0; �ƒ6 /� Z8 � 0;� ƒ7 /� Z1 � 2.295m2,N,maxZ6 kgR267tf { � [a1Tc,max � 2a2(Tc,maxZ1
� 273.15)Tc,max] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]� [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2] [� a1Tc,max � 2a2(Tc,maxZ1
� 273.15)Tc,max] / {[1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]2 / {{Z3Cmax � [a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.235 m3,N,max};� ƒ7 /� Z2 � 0;� ƒ7 /� Z3 � 2.295m2,N,maxZ6 kgR267tf Cmax / {{Z3Cmax � [a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.235 m3,N,max};� ƒ7 /� Z4 � 0; �ƒ7 /� Z5 � 0;� ƒ7 /� Z6 � 3 m2,N,max kgR267{Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15)
� a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15)� a2(Tc,maxZ1 � 273.15)2]0.765tf / m3,N,max};
� ƒ7 /� Z7 � 0; �ƒ7 /� Z8 � 0;� ƒ8 /� Z1 � 0.765kgR2.76 tf {� [a1Tc,max � 2a2(Tc,maxZ1 � 273.15)Tc,max]
[1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1

ORDER REPRINTS
3066 XIE AND ROHANI
� 273.15)2]}� [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2] [� a1Tc,max � 2a2(Tc,maxZ1 � 273.15)Tc,max] /{[1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1 � 273.15)2]2}/{{Z3Cmax � [a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2] / [1 � a0 � a1(Tc,maxZ1 � 273.15) � a2(Tc,maxZ1
� 273.15)2]}0.235 Ls,max};� ƒ8 /� Z2 � 0;� ƒ8 /� Z3 � 0.765kgR2.76 tf Cmax / {{Z3Cmax � [a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2] / [1 � a0 � a1(Tc,maxZ1
� 273.15) � a2(Tc,maxZ1 � 273.15)2]}0.235 Ls,max}� ƒ8 /� Z4 � 0; �ƒ8 /� Z5 � 0; �ƒ8 /� Z6 � 0; �ƒ8 /� Z7 � 0; �ƒ8 /� Z8 � 0.
NOMENCLATURE
A heat transfer area (m2)a0,a1,a2 constantsB nucleation rate (no. / kg solvent�s)C solute concentration (kg solute / kg solvent)C* saturation solute concentration (kg solute / kg solvent)cp specific heat (kJ/ oC�kg crystal)� C supersaturation (kg solute / kg solvent)F Jacobian matrix of ƒ(x); volumetric flow rate of cooling medium
(m3/s)ƒ(x) nonlinear functionsG growth rate (m/s)H Jacobian matrix of h(x)h(x) linear functions� H heat of crystals (J/kg crystal)I Identity matrixK Kalman gain matrixkb nucleation rate coefficient, [(no./kg solute�s)(s/m)1.88]kc proportional gainkg growth rate coefficient, [(m/s)(kg solvent/kg solute)0.765(s/rev)2.76]kv volumetric shape factor of crystalsL crystal size (m)MT magma density (kg solute / kg solvent)mj jth moment of crystal size distribution ( j � 1,2,3,. . .)Ns number of seed crystals per unit weight of solvent (no. / kg solvent)P state error covariance matrixQ covariance matrix of process errorR covariance matrix of measurement error; stirrer rotational speed
(rev/s)
ORDER REPRINTS
KALMAN FILTER APPLICATION 3067
T temperature (K)Tj inside mean cooling jacket temperature (K)Tj,in inlet cooling jacket temperature (K)t time (seconds)tf batch time (seconds)U overall heat transfer coefficient, W / K (m2)V volume (m3)v measurement errorW solvent capacity of the crystallizer, kgWs initial weight of the seed crystals, kgw process noisex state vectorZ measurements; dimensionless state vector
Greek Symbols
� difference dimensionless time� density, kg/m3
� difference
Subscripts
c crystal; crystallizerj jth moment, cooling jacketk sampling instantmax maximum valueN newly generated crystalss seed crystals; solutionT Total numberw cooling water0 initial condition
Superscripts
T transpose of a vector* saturation condition^ estimate• time derivative

ORDER REPRINTS
3068 XIE AND ROHANI
ACKNOWLEDGMENT
The financial support of the Natural Science and Engineering ResearchCouncil of Canada is gratefully acknowledged.
REFERENCES
1. Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems.Trans. ASME J. Basic Eng. 1960, 82 (D), 35.
2. Kalman, R E.; Bucy, R.S. New Results in Linear Filtering and PredictionTheory. Trans. ASME J. Basic Eng. 1961, 83 (D), 95.
3. Gavalas, G.R.; Seinfeld, J.H. Sequential Estimation of States and KineticParameters in Tubular Reactors with Catalyst Decay. Chem. Eng. Sci. 1969,24 (4), 625.
4. Seinfeld, J.H. Optimal Stochastic Control of Nonlinear Systems. AIChE J.1970, 16 (4), 1016.
5. Wells, C.H. Application of Modern Estimation Methods and IdentificationTechniques to Chemical Process. AIChE J. 1971, 17 (4), 966.
6. Wismer, D.A.; Wells, C.H. A Modern Approach to Industrial Process Con-trol. Automatica 1972, 8 (2), 117.
7. Coggan, G.C.; Wilson, J.A. On-line State Estimation with a Small Com-puter. Computer J. 1971, 14 (7), 61.
8. Hamilton, J.C.; Seborg, D.E.; Fisher, D.G. A Experiment Evaluation ofKalman Filtering. AIChE J. 1973, 19 (5), 901.
9. Jang, S.S.; Joseph, B.; Muka, H. Comparison of Two Approaches to On-lineParameter and State Estimation of Nonlinear Systems. Ind. Eng. Chem. Pro-cesses Des. Dev. 1986, 25 (3), 809.
10. Stephanopoulos, G.; San, K.Y. Studies on On-line Bioreactor Identification.I. Theory. Biotechnol. Bioeng. 1984, 26 (10), 1176.
11. San, K.Y.; Stephanopoulos, G. Studies on On-line Bioreactor Identification.II. Numerical and Experimental Results. Biotechnol. Bioeng. 1984, 26 (10),1176.
12. Ramirez, W.F. Optimal State and Parameter Identification. An Applicationto Batch Fermentation. Chem. Eng. Sci. 1987, 42 (11), 2749.
13. Dimitratos, J.; Georgakis, C.; El-Aasser, M.S.; Klein, A. Dynamic Model-ing and State Estimation for an Emulsion Copolymerization Reactor. Com-puters Chem. Eng. 1989, 13 (1/2), 21.
14. Kozub, D.J.; Macgregor, J.F. State Estimation for Semi-Batch Polymeriza-tion Reactors. Chem. Eng. Sci. 1992, 47 (5), 1047.
15. Myers, M.A.; Luecke, R.H. Process Control Applications of an ExtendedKalman Filter Algorithm. Computers Chem. Eng. 1991, 15 (12), 853.

ORDER REPRINTS
16. Lee, J.H.; Ricker, N.L. Extended Kalman Filter Based Nonlinear Model Pre-dictive Control. Ind. Eng. Chem. Res. 1994, 33 (6), 1530.
17. Ahn, S.M.; Park, M.J.; Rhee, H.K. Extended Kalman Filter Based Nonlin-ear Model Predictive Control for a Continuous MMA Polymerization Reac-tor. Ind. Eng. Chem. Res. 1999, 38 (10), 3942.
18. Jazwinski, A.H. Stochastic Processes and Filtering Theory; AcademicPress: New York, 1970.
19. Gelb, A., Ed. Applied Optimal Estimation; The M.I.T. Press: Cambridge,Mass, 1974; 180–228.
20. Xie, W.; Rohani, S.; Phoenix, A. Dynamic Modeling and Operation of aSeed Batch Cooling Crystallizer. Chem. Eng. Commun. 2001, in press.
21. Tavare, N.S.; Garside, J. Simultaneous Estimation of Crystal Nucleation andGrowth Kinetics from Batch Experiments. Chem. Eng. Res. Des. 1986, 64(2), 109.
22. Redman, T.P.; Rohani, S. On-line Measurement of Supersaturation of aKCl-NaCl Aqueous Solution Based on Density Measurement. Can. J. Chem.Eng. 1994, 72 (1), 64–71.
23. Mullin, J.W. Crystallization, 3rd Ed.; Butterworth Heinemann Ltd: Oxford,UK, 1993.
24. Manjaly, J.M. Ph.D. diss. Crystallization Kinetics of Potash Alum., Univer-sity of London, 1978.
Received August 2000
KALMAN FILTER APPLICATION 3069

Order now!
Reprints of this article can also be ordered at
http://www.dekker.com/servlet/product/DOI/101081SS100107645
Request Permission or Order Reprints Instantly!
Interested in copying and sharing this article? In most cases, U.S. Copyright Law requires that you get permission from the article’s rightsholder before using copyrighted content.
All information and materials found in this article, including but not limited to text, trademarks, patents, logos, graphics and images (the "Materials"), are the copyrighted works and other forms of intellectual property of Marcel Dekker, Inc., or its licensors. All rights not expressly granted are reserved.
Get permission to lawfully reproduce and distribute the Materials or order reprints quickly and painlessly. Simply click on the "Request Permission/Reprints Here" link below and follow the instructions. Visit the U.S. Copyright Office for information on Fair Use limitations of U.S. copyright law. Please refer to The Association of American Publishers’ (AAP) website for guidelines on Fair Use in the Classroom.
The Materials are for your personal use only and cannot be reformatted, reposted, resold or distributed by electronic means or otherwise without permission from Marcel Dekker, Inc. Marcel Dekker, Inc. grants you the limited right to display the Materials only on your personal computer or personal wireless device, and to copy and download single copies of such Materials provided that any copyright, trademark or other notice appearing on such Materials is also retained by, displayed, copied or downloaded as part of the Materials and is not removed or obscured, and provided you do not edit, modify, alter or enhance the Materials. Please refer to our Website User Agreement for more details.



![Matrix - University of Cambridge · transpose-matrix == Abs-matrix o transpose-infmatrix o Rep-matrix declare transpose-infmatrix-def [simp] lemma transpose-infmatrix-twice[simp]:](https://img.dokumen.tips/doc/110x75/5d5772d988c993f74a8b7fb4/matrix-university-of-cambridge-transpose-matrix-abs-matrix-o-transpose-infmatrix.jpg)

























