Embed Size (px)
Citation preview

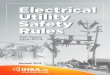
Fleming's left hand rule for motors
Fleming's left hand rule
Alternate representation of Fleming's LHR
Fleming's left hand rule (for electric motors) shows the direction of the thrust on a conductor
carrying a current in a magnetic field.
The left hand is held with the thumb, index finger and middle finger mutually at right angles. It
can be recalled by remembering that "motors drive on the left, in Britain anyway."
The First finger represents the direction of the magnetic Field. (north to south)
The Second finger represents the direction of the Current (the direction of the current is
the direction of conventional current; from positive to negative).
The Thumb represents the direction of the Thrust or resultant Motion.

This can also be remembered using "FBI" and moving from thumb to second finger.
The thumb is the force F.
The first finger is the magnetic field B.
The second finger is that of current I.
There also exists Fleming's right hand rule (for generators). The appropriately-handed rule can be
recalled by remembering that the letter "g" is in "right" and "generator".
Both mnemonics are named after British professional engineer John Ambrose Fleming who
invented them.
Other mnemonics also exist that use a left hand rule or a right hand rule for predicting resulting
motion from a pre-existing current and field.
De Graaf's translation of Fleming's left-hand rule - which also uses thrust, field and current - and
the right-hand rule, is the FBI rule. The FBI rule changes Thrust into F (Lorentz force), B
(direction of the magnetic field) and I (current). The FBI rule is easily remembered by US
citizens because of the commonly known abbreviation for the Federal Bureau of Investigation.
This works for both dynamos and motors. If electrons flow forwards (away from us) in a wire
held horizontally between a south pole on its left and a north pole on its right, the electrons will
try to move to their left, through the lines of force ("forest") running across from the north pole.
This will pull the wire downwards.
If the wire itself is pulled downwards the electrons in it will be moving down through the lines of
force and will wish to move to their left, ie towards us (the opposite direction from the previous
one) which is exactly as it should be.
Hold a north pole at the left side of a cathode ray tube tv, in which electrons are rushing toward
the screen. The lines of force run, roughly, from left to right across the tube. The electrons will
turn to their left in this "forest", ie downwards, and therefore the image will move down. A south
pole will make the image rise.
Fleming's right hand rule

Fleming's right hand rule
Fleming's right hand rule (for generators) shows the direction of induced current when a
conductor moves in a magnetic field.
The right hand is held with the thumb, first finger and second finger mutually perpendicular to
each other (at right angles), as shown in the diagram .
The Thumb represents the direction of Motion of the conductor.
The First finger represents the direction of the Field. (north to south)
The Second finger represents the direction of the induced or generated Current (the
direction of the induced current will be the direction of conventional current; from
positive to negative).
Faraday's law of induction
History
Electromagnetic induction was discovered independently by Michael Faraday and Joseph Henry
in 1831; however, Faraday was the first to publish the results of his experiments.[2][3]
Faraday's disk

In Faraday's first experimental demonstration of electromagnetic induction (August 1831), he
wrapped two wires around opposite sides of an iron torus (an arrangement similar to a modern
transformer). Based on his assessment of recently-discovered properties of electromagnets, he
expected that when current started to flow in one wire, a sort of wave would travel through the
ring and cause some electrical effect on the opposite side. He plugged one wire into a
galvanometer, and watched it as he connected the other wire to a battery. Indeed, he saw a
transient current (which he called a "wave of electricity") when he connected the wire to the
battery, and another when he disconnected it.[4]
Within two months, Faraday had found several
other manifestations of electromagnetic induction. For example, he saw transient currents when
he quickly slid a bar magnet in and out of a coil of wires, and he generated a steady (DC) current
by rotating a copper disk near a bar magnet with a sliding electrical lead ("Faraday's disk").[5]
Faraday explained electromagnetic induction using a concept he called lines of force. However,
scientists at the time widely rejected his theoretical ideas, mainly because they were not
formulated mathematically.[6]
An exception was Maxwell, who used Faraday's ideas as the basis
of his quantitative electromagnetic theory.[6][7][8]
In Maxwell's papers, the time varying aspect of
electromagnetic induction is expressed as a differential equation which Oliver Heaviside referred
to as Faraday's law even though it is slightly different in form from the original version of
Faraday's law, and doesn't cater for motionally induced EMF. Heaviside's version is the form
recognized today in the group of equations known as Maxwell's equations.
Lenz's law, formulated by Heinrich Lenz in 1834, describes "flux through the circuit", and gives
the direction of the induced electromotive force and current resulting from electromagnetic
induction (elaborated upon in the examples below).
Faraday's experiment showing induction between coils of wire: The liquid battery (right)
provides a current which flows through the small coil (A), creating a magnetic field. When the
coils are stationary, no current is induced. But when the small coil is moved in or out of the large
coil (B), the magnetic flux through the large coil changes, inducing a current which is detected
by the galvanometer (G).[9]
Faraday's law as two different phenomena

Some physicists have remarked that Faraday's law is a single equation describing two different
phenomena: The motional EMF generated by a magnetic force on a moving wire, and the
transformer EMF generated by an electric force due to a changing magnetic field. James Clerk
Maxwell drew attention to this fact in his 1861 paper On Physical Lines of Force. In the latter
half of part II of that paper, Maxwell gives a separate physical explanation for each of the two
phenomena. A reference to these two aspects of electromagnetic induction is made in some
modern textbooks.[10]
As Richard Feynman states:[11]
So the "flux rule" that the emf in a circuit is equal to the rate of change of the magnetic flux
through the circuit applies whether the flux changes because the field changes or because the
circuit moves (or both).... Yet in our explanation of the rule we have used two completely
distinct laws for the two cases – for "circuit moves" and for "field
changes".
We know of no other place in physics where such a simple and accurate general principle
requires for its real understanding an analysis in terms of two different phenomena.
– Richard P. Feynman, The Feynman Lectures on Physics
Reflection on this apparent dichotomy was one of the principal paths that led Einstein to develop
special relativity:
It is known that Maxwell’s electrodynamics—as usually understood at the present time—when
applied to moving bodies, leads to asymmetries which do not appear to be inherent in the
phenomena. Take, for example, the reciprocal electrodynamic action of a magnet and a
conductor. The observable phenomenon here depends only on the relative motion of the
conductor and the magnet, whereas the customary view draws a sharp distinction between the
two cases in which either the one or the other of these bodies is in motion. For if the magnet is in
motion and the conductor at rest, there arises in the neighbourhood of the magnet an electric field
with a certain definite energy, producing a current at the places where parts of the conductor are
situated. But if the magnet is stationary and the conductor in motion, no electric field arises in
the neighbourhood of the magnet. In the conductor, however, we find an electromotive force, to
which in itself there is no corresponding energy, but which gives rise—assuming equality of
relative motion in the two cases discussed—to electric currents of the same path and intensity as
those produced by the electric forces in the former case.
– Albert Einstein, On the Electrodynamics of Moving Bodies[12]
Flux through a surface and EMF around a loop

The definition of surface integral relies on splitting the surface Σ into small surface elements.
Each element is associated with a vector dA of magnitude equal to the area of the element and
with direction normal to the element and pointing outward.
A vector field F(r, t) defined throughout space, and a surface Σ bounded by curve ∂Σ moving
with velocity v over which the field is integrated.
Faraday's law of induction makes use of the magnetic flux ΦB through a surface Σ, defined by an
integral over a surface:
where dA is an element of surface area of the moving surface Σ(t), B is the magnetic field, and
B·dA is a vector dot product. The surface is considered to have a "mouth" outlined by a closed
curve denoted ∂Σ(t). When the flux changes, Faraday's law of induction says that the work
done (per unit charge) moving a test charge around the closed curve ∂Σ(t), called the
electromotive force (EMF), is given by:
where is the magnitude of the electromotive force (EMF) in volts and ΦB is the magnetic flux
in webers. The direction of the electromotive force is given by Lenz's law.
For a tightly-wound coil of wire, composed of N identical loops, each with the same ΦB,
Faraday's law of induction states that

where N is the number of turns of wire and ΦB is the magnetic flux in webers through a single
loop.
In choosing a path ∂Σ(t) to find EMF, the path must satisfy the basic requirements that (i) it is a
closed path, and (ii) the path must capture the relative motion of the parts of the circuit (the
origin of the t-dependence in ∂Σ(t) ). It is not a requirement that the path follow a line of current
flow, but of course the EMF that is found using the flux law will be the EMF around the chosen
path. If a current path is not followed, the EMF might not be the EMF driving the current.
Example: Spatially varying Magnetic field
Figure 3: Closed rectangular wire loop moving along x-axis at velocity v in magnetic field B that
varies with position x.
Consider the case in Figure 3 of a closed rectangular loop of wire in the xy-plane translated in the
x-direction at velocity v. Thus, the center of the loop at xC satisfies v = dxC / dt. The loop has
length ℓ in the y-direction and width w in the x-direction. A time-independent but spatially
varying magnetic field B(x) points in the z-direction. The magnetic field on the left side is B( xC
− w / 2), and on the right side is B( xC + w / 2). The electromotive force is to be found by using
either the Lorentz force law or equivalently by using Faraday's induction law above.
Lorentz force law method
A charge q in the wire on the left side of the loop experiences a Lorentz force q v × B k = −q v
B(xC − w / 2) j ( j, k unit vectors in the y- and z-directions; see vector cross product), leading to
an EMF (work per unit charge) of v ℓ B(xC − w / 2) along the length of the left side of the loop.
On the right side of the loop the same argument shows the EMF to be v ℓ B(xC + w / 2). The two
EMF's oppose each other, both pushing positive charge toward the bottom of the loop. In the

case where the B-field increases with increase in x, the force on the right side is largest, and the
current will be clockwise: using the right-hand rule, the B-field generated by the current opposes
the impressed field.[13]
The EMF driving the current must increase as we move counterclockwise
(opposite to the current). Adding the EMF's in a counterclockwise tour of the loop we find
Faraday's law method
At any position of the loop the magnetic flux through the loop is
The sign choice is decided by whether the normal to the surface points in the same direction as
B, or in the opposite direction. If we take the normal to the surface as pointing in the same
direction as the B-field of the induced current, this sign is negative. The time derivative of the
flux is then (using the chain rule of differentiation or the general form of Leibniz rule for
differentiation of an integral):
(where v = dxC / dt is the rate of motion of the loop in the x-direction ) leading to:
as before.
The equivalence of these two approaches is general and, depending on the example, one or the
other method may prove more practical.
Example: Moving loop in uniform Magnetic field

Figure 4: Rectangular wire loop rotating at angular velocity ω in radially outward pointing
magnetic field B of fixed magnitude. Current is collected by brushes attached to top and bottom
discs, which have conducting rims.
Figure 4 shows a spindle formed of two discs with conducting rims and a conducting loop
attached vertically between these rims. The entire assembly spins in a magnetic field that points
radially outward, but is the same magnitude regardless of its direction. A radially oriented
collecting return loop picks up current from the conducting rims. At the location of the collecting
return loop, the radial B-field lies in the plane of the collecting loop, so the collecting loop
contributes no flux to the circuit. The electromotive force is to be found directly and by using
Faraday's law above.
Lorentz force law method
In this case the Lorentz force drives the current in the two vertical arms of the moving loop
downward, so current flows from the top disc to the bottom disc. In the conducting rims of the
discs, the Lorentz force is perpendicular to the rim, so no EMF is generated in the rims, nor in
the horizontal portions of the moving loop. Current is transmitted from the bottom rim to the top
rim through the external return loop, which is oriented so the B-field is in its plane. Thus, the
Lorentz force in the return loop is perpendicular to the loop, and no EMF is generated in this
return loop. Traversing the current path in the direction opposite to the current flow, work is
done against the Lorentz force only in the vertical arms of the moving loop, where
where v= velocity of moving charge [14]
Consequently, the EMF is
where v = velocity of conductor or magnet [14]
and l = vertical length of the loop. In this case the
velocity is related to the angular rate of rotation by v = r ω, with r = radius of cylinder. Notice
that the same work is done on any path that rotates with the loop and connects the upper and
lower rim.

Faraday's law method
An intuitively appealing but mistaken approach to using the flux rule would say the flux through
the circuit was just ΦB = B w ℓ, where w = width of the moving loop. This number is time-
independent, so the approach predicts incorrectly that no EMF is generated. The flaw in this
argument is that it fails to consider the entire current path, which is a closed loop.
To use the flux rule, we have to look at the entire current path, which includes the path through
the rims in the top and bottom discs. We can choose an arbitrary closed path through the rims
and the rotating loop, and the flux law will find the EMF around the chosen path. Any path that
has a segment attached to the rotating loop captures the relative motion of the parts of the circuit.
As an example path, let's traverse the circuit in the direction of rotation in the top disc, and in the
direction opposite to the direction of rotation in the bottom disc (shown by arrows in Figure 4).
In this case, for the moving loop at an angle θ from the collecting loop, a portion of the cylinder
of area A = r ℓ θ is part of the circuit. This area is perpendicular to the B-field, and so contributes
to the flux an amount:
where the sign is negative because the right-hand rule suggests the B-field generated by the
current loop is opposite in direction to the applied B field. As this is the only time-dependent
portion of the flux, the flux law predicts an EMF of
in agreement with the Lorentz force law calculation.
Now let's try a different path. Follow a path traversing the rims via the opposite choice of
segments. Then the coupled flux would decrease as θ increased, but the right-hand rule would
suggest the current loop added to the applied B-field, so the EMF around this path is the same as
for the first path. Any mixture of return paths leads to the same result for EMF, so it is actually
immaterial which path is followed.
Direct evaluation of the change in flux

Figure 5: A simplified version of Figure 4. The loop slides with velocity v in a stationary,
homogeneous B-field.
The use of a closed path to find EMF as done above appears to depend upon details of the path
geometry. In contrast, the Lorentz-law approach is independent of such restrictions. The
following discussion is intended to provide a better understanding of the equivalence of paths
and escape the particulars of path selection when using the flux law.
Figure 5 is an idealization of Figure 4 with the cylinder unwrapped onto a plane. The same path-
related analysis works, but a simplification is suggested. The time-independent aspects of the
circuit cannot affect the time-rate-of-change of flux. For example, at a constant velocity of
sliding the loop, the details of current flow through the loop are not time dependent. Instead of
concern over details of the closed loop selected to find the EMF, one can focus on the area of B-
field swept out by the moving loop. This suggestion amounts to finding the rate at which flux is
cut by the circuit.[15]
That notion provides direct evaluation of the rate of change of flux, without
concern over the time-independent details of various path choices around the circuit. Just as with
the Lorentz law approach, it is clear that any two paths attached to the sliding loop, but differing
in how they cross the loop, produce the same rate-of-change of flux.
In Figure 5 the area swept out in unit time is simply dA / dt = v ℓ, regardless of the details of the
selected closed path, so Faraday's law of induction provides the EMF as:[16]
This path independence of EMF shows that if the sliding loop is replaced by a solid conducting
plate, or even some complex warped surface, the analysis is the same: find the flux in the area
swept out by the moving portion of the circuit. In a similar way, if the sliding loop in the drum
generator of Figure 4 is replaced by a 360° solid conducting cylinder, the swept area calculation
is exactly the same as for the case with only a loop. That is, the EMF predicted by Faraday's law
is exactly the same for the case with a cylinder with solid conducting walls or, for that matter, a
cylinder with a cheese grater for walls. Notice, though, that the current that flows as a result of
this EMF will not be the same because the resistance of the circuit determines the current.
The Maxwell-Faraday equation

Figure 6: An illustration of Kelvin-Stokes theorem with surface Σ its boundary ∂Σ and
orientation n set by the right-hand rule.
A changing magnetic field creates an electric field; this phenomenon is described by the
Maxwell-Faraday equation:[17]
where:
denotes curl
E is the electric field
B is the magnetic field
This equation appears in modern sets of Maxwell's equations and is often referred to as Faraday's
law. However, because it contains only partial time derivatives, its application is restricted to
situations where the test charge is stationary in a time varying magnetic field. It does not account
for electromagnetic induction in situations where a charged particle is moving in a magnetic
field.
It also can be written in an integral form by the Kelvin-Stokes theorem:[18]
where the movement of the derivative before the integration requires a time-independent surface
Σ (considered in this context to be part of the interpretation of the partial derivative), and as
indicated in Figure 6:

Σ is a surface bounded by the closed contour ∂Σ; both Σ and ∂Σ are fixed, independent of
time
E is the electric field,
dℓ is an infinitesimal vector element of the contour ∂Σ,
B is the magnetic field.
dA is an infinitesimal vector element of surface Σ , whose magnitude is the area of an
infinitesimal patch of surface, and whose direction is orthogonal to that surface patch.
Both dℓ and dA have a sign ambiguity; to get the correct sign, the right-hand rule is used, as
explained in the article Kelvin-Stokes theorem. For a planar surface Σ, a positive path element dℓ
of curve ∂Σ is defined by the right-hand rule as one that points with the fingers of the right hand
when the thumb points in the direction of the normal n to the surface Σ.
The integral around ∂Σ is called a path integral or line integral. The surface integral at the right-
hand side of the Maxwell-Faraday equation is the explicit expression for the magnetic flux ΦB
through Σ. Notice that a nonzero path integral for E is different from the behavior of the electric
field generated by charges. A charge-generated E-field can be expressed as the gradient of a
scalar field that is a solution to Poisson's equation, and has a zero path integral. See gradient
theorem.
The integral equation is true for any path ∂Σ through space, and any surface Σ for which that
path is a boundary. Note, however, that ∂Σ and Σ are understood not to vary in time in this
formula. This integral form cannot treat motional EMF because Σ is time-independent. Notice as
well that this equation makes no reference to EMF , and indeed cannot do so without
introduction of the Lorentz force law to enable a calculation of work.
Figure 7: Area swept out by vector element dℓ of curve ∂Σ in time dt when moving with velocity
v.
Using the complete Lorentz force to calculate the EMF,
a statement of Faraday's law of induction more general than the integral form of the Maxwell-
Faraday equation is (see Lorentz force):

where ∂Σ(t) is the moving closed path bounding the moving surface Σ(t), and v is the velocity of
movement. See Figure 2. Notice that the ordinary time derivative is used, not a partial time
derivative, implying the time variation of Σ(t) must be included in the differentiation. In the
integrand the element of the curve dℓ moves with velocity v.
Figure 7 provides an interpretation of the magnetic force contribution to the EMF on the left side
of the above equation. The area swept out by segment dℓ of curve ∂Σ in time dt when moving
with velocity v is (see geometric meaning of cross-product):
so the change in magnetic flux ΔΦB through the portion of the surface enclosed by ∂Σ in time dt
is:
and if we add these ΔΦB-contributions around the loop for all segments dℓ, we obtain the
magnetic force contribution to Faraday's law. That is, this term is related to motional EMF.
Example: viewpoint of a moving observer
Revisiting the example of Figure 3 in a moving frame of reference brings out the close
connection between E- and B-fields, and between motional and induced EMF's.[19]
Imagine an
observer of the loop moving with the loop. The observer calculates the EMF around the loop
using both the Lorentz force law and Faraday's law of induction. Because this observer moves
with the loop, the observer sees no movement of the loop, and zero v × B. However, because the
B-field varies with position x, the moving observer sees a time-varying magnetic field, namely:
where k is a unit vector pointing in the z-direction.[20]
Lorentz force law version
The Maxwell-Faraday equation says the moving observer sees an electric field Ey in the y-
direction given by:

Here the chain rule is used:
Solving for Ey, to within a constant that contributes nothing to an integral around the loop,
Using the Lorentz force law, which has only an electric field component, the observer finds the
EMF around the loop at a time t to be:
which is exactly the same result found by the stationary observer, who sees the centroid xC has
advanced to a position xC + v t. However, the moving observer obtained the result under the
impression that the Lorentz force had only an electric component, while the stationary observer
thought the force had only a magnetic component.
Faraday's law of induction
Using Faraday's law of induction, the observer moving with xC sees a changing magnetic flux,
but the loop does not appear to move: the center of the loop xC is fixed because the moving
observer is moving with the loop. The flux is then:
where the minus sign comes from the normal to the surface pointing oppositely to the applied B-
field. The EMF from Faraday's law of induction is now:

the same result. The time derivative passes through the integration because the limits of
integration have no time dependence. Again, the chain rule was used to convert the time
derivative to an x-derivative.
The stationary observer thought the EMF was a motional EMF, while the moving observer
thought it was an induced EMF.[21]
Electrical generator
Figure 8: Faraday's disc electric generator. The disc rotates with angular rate ω, sweeping the
conducting radius circularly in the static magnetic field B. The magnetic Lorentz force v × B
drives the current along the conducting radius to the conducting rim, and from there the circuit
completes through the lower brush and the axle supporting the disc. Thus, current is generated
from mechanical motion.
The EMF generated by Faraday's law of induction due to relative movement of a circuit and a
magnetic field is the phenomenon underlying electrical generators. When a permanent magnet is
moved relative to a conductor, or vice versa, an electromotive force is created. If the wire is
connected through an electrical load, current will flow, and thus electrical energy is generated,
converting the mechanical energy of motion to electrical energy. For example, the drum
generator is based upon Figure 4. A different implementation of this idea is the Faraday's disc,
shown in simplified form in Figure 8. Note that either the analysis of Figure 5, or direct
application of the Lorentz force law, shows that a solid conducting disc works the same way.
In the Faraday's disc example, the disc is rotated in a uniform magnetic field perpendicular to the
disc, causing a current to flow in the radial arm due to the Lorentz force. It is interesting to
understand how it arises that mechanical work is necessary to drive this current. When the
generated current flows through the conducting rim, a magnetic field is generated by this current
through Ampere's circuital law (labeled "induced B" in Figure 8). The rim thus becomes an
electromagnet that resists rotation of the disc (an example of Lenz's law). On the far side of the
figure, the return current flows from the rotating arm through the far side of the rim to the bottom
brush. The B-field induced by this return current opposes the applied B-field, tending to decrease
the flux through that side of the circuit, opposing the increase in flux due to rotation. On the near
side of the figure, the return current flows from the rotating arm through the near side of the rim
to the bottom brush. The induced B-field increases the flux on this side of the circuit, opposing

the decrease in flux due to rotation. Thus, both sides of the circuit generate an emf opposing the
rotation. The energy required to keep the disc moving, despite this reactive force, is exactly equal
to the electrical energy generated (plus energy wasted due to friction, Joule heating, and other
inefficiencies). This behavior is common to all generators converting mechanical energy to
electrical energy.
Although Faraday's law always describes the working of electrical generators, the detailed
mechanism can differ in different cases. When the magnet is rotated around a stationary
conductor, the changing magnetic field creates an electric field, as described by the Maxwell-
Faraday equation, and that electric field pushes the charges through the wire. This case is called
an induced EMF. On the other hand, when the magnet is stationary and the conductor is rotated,
the moving charges experience a magnetic force (as described by the Lorentz force law), and this
magnetic force pushes the charges through the wire. This case is called motional EMF. (For
more information on motional EMF, induced EMF, Faraday's law, and the Lorentz force, see
above example, and see Griffiths.)[22]
Electrical motor
An electrical generator can be run "backwards" to become a motor. For example, with the
Faraday disc, suppose a DC current is driven through the conducting radial arm by a voltage.
Then by the Lorentz force law, this traveling charge experiences a force in the magnetic field B
that will turn the disc in a direction given by Fleming's left hand rule. In the absence of
irreversible effects, like friction or Joule heating, the disc turns at the rate necessary to make d
ΦB / dt equal to the voltage driving the current.
Electrical transformer
The EMF predicted by Faraday's law is also responsible for electrical transformers. When the
electric current in a loop of wire changes, the changing current creates a changing magnetic field.
A second wire in reach of this magnetic field will experience this change in magnetic field as a
change in its coupled magnetic flux, a d ΦB / d t. Therefore, an electromotive force is set up in
the second loop called the induced EMF or transformer EMF. If the two ends of this loop are
connected through an electrical load, current will flow.
Magnetic flow meter
Faraday's law is used for measuring the flow of electrically conductive liquids and slurries. Such
instruments are called magnetic flow meters. The induced voltage ℇ generated in the magnetic
field B due to a conductive liquid moving at velocity v is thus given by:
,
where ℓ is the distance between electrodes in the magnetic flow meter.

Parasitic induction and waste heating
All metal objects moving in relation to a static magnetic field will experience inductive power
flow, as do all stationary metal objects in relation to a moving magnetic field. These power flows
are occasionally undesirable, resulting in flowing electric current at very low voltage and heating
of the metal.
There are a number of methods employed to control these undesirable inductive effects.
Electromagnets in electric motors, generators, and transformers do not use solid metal,
but instead use thin sheets of metal plate, called laminations. These thin plates reduce the
parasitic eddy currents, as described below.
Inductive coils in electronics typically use magnetic cores to minimize parasitic current
flow. They are a mixture of metal powder plus a resin binder that can hold any shape.
The binder prevents parasitic current flow through the powdered metal.
Electromagnet laminations
Eddy currents occur when a solid metallic mass is rotated in a magnetic field, because the outer
portion of the metal cuts more lines of force than the inner portion, hence the induced
electromotive force not being uniform, tends to set up currents between the points of greatest and
least potential. Eddy currents consume a considerable amount of energy and often cause a
harmful rise in temperature.[23]
Only five laminations or plates are shown in this example, so as to show the subdivision of the
eddy currents. In practical use, the number of laminations or punchings ranges from 40 to 66 per
inch, and brings the eddy current loss down to about one percent. While the plates can be
separated by insulation, the voltage is so low that the natural rust/oxide coating of the plates is
enough to prevent current flow across the laminations.[24]

This is a rotor approximately 20mm in diameter from a DC motor used in a CD player. Note the
laminations of the electromagnet pole pieces, used to limit parasitic inductive losses.
Parasitic induction within inductors
In this illustration, a solid copper bar inductor on a rotating armature is just passing under the tip
of the pole piece N of the field magnet. Note the uneven distribution of the lines of force across
the bar inductor. The magnetic field is more concentrated and thus stronger on the left edge of
the copper bar (a,b) while the field is weaker on the right edge (c,d). Since the two edges of the
bar move with the same velocity, this difference in field strength across the bar creates whirls or
current eddies within the copper bar.[25]
This is one reason high voltage devices tend to be more efficient than low voltage devices. High
voltage devices use many turns of small-gauge wire in motors, generators, and transformers.
These many small turns of inductor wire in the electromagnet break up the eddy flows that can
form within the large, thick inductors of low voltage, high current devices.
Maxwell's equations
Maxwell's equations are a set of four partial differential equations that, together with the
Lorentz force law, form the foundation of classical electrodynamics, classical optics, and electric

circuits. These in turn underlie the present radio-, television-, phone-, and information-
technologies.
Maxwell's equations have two major variants. The "microscopic" set of Maxwell's equations uses
total charge and total current including the difficult to calculate atomic level charges and currents
in materials. The "macroscopic" set of Maxwell's equations defines two new auxiliary fields that
can sidestep having to know these 'atomic' sized charges and currents.
Maxwell's equations are named after the Scottish physicist and mathematician James Clerk
Maxwell, since they are all found in a four-part paper, On Physical Lines of Force, which he
published between 1861 and 1862. The mathematical form of the Lorentz force law also
appeared in this paper.
It is often useful to write Maxwell's equations in other forms which are often called Maxwell's
equations as well. A relativistic formulation in terms of covariant field tensors is used in special
relativity. While, in quantum mechanics, a version based on the electric and magnetic potentials
is preferred.
Conceptual description
Conceptually, Maxwell's equations describe how electric charges and electric currents act as
sources for the electric and magnetic fields. Further, it describes how a time varying electric field
generates a time varying magnetic field and vice versa. (See below for a mathematical
description of these laws.) Of the four equations, two of them, Gauss's law and Gauss's law for
magnetism, describe how the fields emanate from charges. (For the magnetic field there is no
magnetic charge and therefore magnetic fields lines neither begin nor end anywhere.) The other
two equations describe how the fields 'circulate' around their respective sources; the magnetic
field 'circulates' around electric currents and time varying electric field in Ampère's law with
Maxwell's correction, while the electric field 'circulates' around time varying magnetic fields in
Faraday's law.
Gauss's law
Gauss's law describes the relationship between an electric field and the generating electric
charges: The electric field points away from positive charges and towards negative charges. In
the field line description, electric field lines begin only at positive electric charges and end only
at negative electric charges. 'Counting' the number of field lines in a closed surface, therefore,
yields the total charge enclosed by that surface. More technically, it relates the electric flux
through any hypothetical closed "Gaussian surface" to the electric charge within the surface.

Gauss's law for magnetism: magnetic field lines never begin nor end but form loops or extend to
infinity as shown here with the magnetic field due to a ring of current.
Gauss's law for magnetism
Gauss's law for magnetism states that there are no "magnetic charges" (also called magnetic
monopoles), analogous to electric charges.[1]
Instead, the magnetic field due to materials is
generated by a configuration called a dipole. Magnetic dipoles are best represented as loops of
current but resembles a positive and negative 'magnetic charges' inseparably bound together and
having no net 'magnetic charge'. In terms of field lines, this equation states that magnetic field
lines neither begin nor end but make loops or extend to infinity and back. In other words, any
magnetic field line that enters a given volume must somewhere exit that volume. Equivalent
technical statements are that the total magnetic flux through any Gaussian surface is zero, or that
the magnetic field is a solenoidal vector field.
Faraday's law
In a geomagnetic storm, a surge in the flux of charged particles temporarily alters Earth's
magnetic field, which induces electric fields in Earth's atmosphere, thus causing surges in our
electrical power grids.
Faraday's law describes how a time varying magnetic field creates ("induces") an electric
field.[1]
This aspect of electromagnetic induction is the operating principle behind many electric
generators: for example a rotating bar magnet creates a changing magnetic field, which in turn
generates an electric field in a nearby wire. (Note: there are two closely related equations which
are called Faraday's law. The form used in Maxwell's equations is always valid but more
restrictive than that originally formulated by Michael Faraday.)

Ampère's law with Maxwell's correction
An Wang's magnetic core memory (1954) is an application of Ampere's law. Each core stores
one bit of data.
Ampère's law with Maxwell's correction states that magnetic fields can be generated in two
ways: by electrical current (this was the original "Ampère's law") and by changing electric fields
(this was "Maxwell's correction").
Maxwell's correction to Ampère's law is particularly important: It means that a changing
magnetic field creates an electric field, and a changing electric field creates a magnetic field.[1][2]
Therefore, these equations allow self-sustaining "electromagnetic waves" to travel through empty
space (see electromagnetic wave equation).
The speed calculated for electromagnetic waves, which could be predicted from experiments on
charges and currents,[note 1]
exactly matches the speed of light; indeed, light is one form of
electromagnetic radiation (as are X-rays, radio waves, and others). Maxwell understood the
connection between electromagnetic waves and light in 1861, thereby unifying the previously-
separate fields of electromagnetism and optics.
Units and summary of equations
Maxwell's equations vary with the unit system used. Though the general form remains the same,
various definitions get changed and different constants appear at different places. The equations
in this section are given in SI units. Other units commonly used are Gaussian units (based on the
cgs system[3]
), Lorentz-Heaviside units (used mainly in particle physics) and Planck units (used
in theoretical physics). See below for CGS-Gaussian units.
For a description of the difference between the microscopic and macroscopic variants of
Maxwell's equations see the relevant sections below.
In the equations given below, symbols in bold represent vector quantities, and symbols in italics
represent scalar quantities. The definitions of terms used in the two tables of equations are given
in another table immediately following.
Table of 'microscopic' equations

Formulation in terms of total charge and current[note 2]
Name Differential form Integral form
Gauss's law
Gauss's law for
magnetism
Maxwell–Faraday
equation
(Faraday's law of
induction)
Ampère's circuital law
(with Maxwell's
correction)
Table of 'macroscopic' equations
Formulation in terms of free charge and current
Name Differential form Integral form
Gauss's law
Gauss's law for magnetism
Maxwell–Faraday equation
(Faraday's law of induction)
Ampère's circuital law
(with Maxwell's correction)
Table of terms used in Maxwell's equations
The following table provides the meaning of each symbol and the SI unit of measure:
Definitions and units
Symbol Meaning (first term is the most common) SI Unit of Measure
electric field
also called the electric field intensity
volt per meter or,
equivalently,

newton per coulomb
magnetic field
also called the magnetic induction
also called the magnetic field density
also called the magnetic flux density
tesla, or equivalently,
weber per square meter,
volt-second per square
meter
electric displacement field
also called the electric induction
also called the electric flux density
coulombs per square
meter or equivalently,
newton per volt-meter
magnetizing field
also called auxiliary magnetic field
also called magnetic field intensity
also called magnetic field
ampere per meter
the divergence operator per meter (factor
contributed by applying
either operator) the curl operator
partial derivative with respect to time
per second (factor
contributed by applying
the operator)
differential vector element of surface area A,
with infinitesimally small magnitude and
direction normal to surface S
square meters
differential vector element of path length
tangential to the path/curve meters
permittivity of free space, also called the
electric constant, a universal constant farads per meter
permeability of free space, also called the
magnetic constant, a universal constant
henries per meter, or
newtons per ampere
squared
free charge density (not including bound
charge)
coulombs per cubic
meter
total charge density (including both free and
bound charge)
coulombs per cubic
meter
free current density (not including bound
current)
amperes per square
meter
total current density (including both free and
bound current)
amperes per square
meter
net free electric charge within the three-
dimensional volume V (not including bound
charge)
coulombs
net electric charge within the three-
dimensional volume V (including both free
and bound charge)
coulombs

line integral of the electric field along the
boundary ∂S of a surface S (∂S is always a
closed curve).
joules per coulomb
line integral of the magnetic field over the
closed boundary ∂S of the surface S tesla-meters
the electric flux (surface integral of the
electric field) through the (closed) surface
(the boundary of the volume V)
joule-meter per coulomb
the magnetic flux (surface integral of the
magnetic B-field) through the (closed)
surface (the boundary of the volume V)
tesla meters-squared or
webers
magnetic flux through any surface S, not
necessarily closed
webers or equivalently,
volt-seconds
electric flux through any surface S, not
necessarily closed
joule-meters per
coulomb
flux of electric displacement field through
any surface S, not necessarily closed coulombs
net free electrical current passing through the
surface S (not including bound current) amperes
net electrical current passing through the
surface S (including both free and bound
current)
amperes
Proof that the two general formulations are equivalent
The two alternate general formulations of Maxwell's equations given above are mathematically
equivalent and related by the following relations:

where P and M are polarization and magnetization, and ρb and Jb are bound charge and current,
respectively. Substituting these equations into the 'macroscopic' Maxwell's equations gives
identically the microscopic equations.
Maxwell's 'microscopic' equations
The microscopic variant of Maxwell's equation expresses the electric E field and the magnetic B
field in terms of the total charge and total current present including the charges and currents at
the atomic level. It is sometimes called the general form of Maxwell's equations or "Maxwell's
equations in a vacuum". Both variants of Maxwell's equations are equally general, though, as
they are mathematically equivalent. The microscopic equations are most useful in waveguides
for example, when there are no dielectric or magnetic materials nearby.
Formulation in terms of total charge and current[note 3]
Name Differential form Integral form
Gauss's law
Gauss's law for
magnetism
Maxwell–Faraday
equation
(Faraday's law of
induction)
Ampère's circuital law
(with Maxwell's
correction)
With neither charges nor currents
In a region with no charges (ρ = 0) and no currents (J = 0), such as in a vacuum, Maxwell's
equations reduce to:
These equations lead directly to E and B satisfying the wave equation for which the solutions are
linear combinations of plane waves traveling at the speed of light,

In addition, E and B are mutually perpendicular to each other and the direction of motion and are
in phase with each other. A sinusoidal plane wave is one special solution of these equations.
In fact, Maxwell's equations explain how these waves can physically propagate through space.
The changing magnetic field creates a changing electric field through Faraday's law. In turn, that
electric field creates a changing magnetic field through Maxwell's correction to Ampère's law.
This perpetual cycle allows these waves, now known as electromagnetic radiation, to move
through space at velocity c.
Maxwell's 'macroscopic' equations
Unlike the 'microscopic' equations, "Maxwell's macroscopic equations", also known as
Maxwell's equations in matter, factor out the bound charge and current to obtain equations that
depend only on the free charges and currents. These equations are more similar to those that
Maxwell himself introduced. The cost of this factorization is that additional fields need to be
defined: the displacement field D which is defined in terms of the electric field E and the
polarization P of the material, and the magnetic-H field, which is defined in terms of the
magnetic-B field and the magnetization M of the material.
Bound charge and current
Left: A schematic view of how an assembly of microscopic dipoles produces opposite surface
charges as shown at top and bottom. Right: How an assembly of microscopic current loops add
together to produce a macroscopically circulating current loop. Inside the boundaries, the
individual contributions tend to cancel, but at the boundaries no cancellation occurs.
When an electric field is applied to a dielectric material its molecules respond by forming
microscopic electric dipoles—their atomic nuclei move a tiny distance in the direction of the
field, while their electrons move a tiny distance in the opposite direction. This produces a
macroscopic bound charge in the material even though all of the charges involved are bound to
individual molecules. For example, if every molecule responds the same, similar to that shown in
the figure, these tiny movements of charge combine to produce a layer of positive bound charge

on one side of the material and a layer of negative charge on the other side. The bound charge is
most conveniently described in terms of a polarization, P, in the material. If P is uniform, a
macroscopic separation of charge is produced only at the surfaces where P enter and leave the
material. For non-uniform P, a charge is also produced in the bulk.[5]
Somewhat similarly, in all materials the constituent atoms exhibit magnetic moments that are
intrinsically linked to the angular momentum of the atoms' components, most notably their
electrons. The connection to angular momentum suggests the picture of an assembly of
microscopic current loops. Outside the material, an assembly of such microscopic current loops
is not different from a macroscopic current circulating around the material's surface, despite the
fact that no individual magnetic moment is traveling a large distance. These bound currents can
be described using the magnetization M.[6]
The very complicated and granular bound charges and bound currents, therefore can be
represented on the macroscopic scale in terms of P and M which average these charges and
currents on a sufficiently large scale so as not to see the granularity of individual atoms, but also
sufficiently small that they vary with location in the material. As such, the Maxwell's
macroscopic equations ignores many details on a fine scale that may be unimportant to
understanding matters on a grosser scale by calculating fields that are averaged over some
suitably sized volume.
Equations
Formulation in terms of free charge and current
Name Differential form Integral form
Gauss's law
Gauss's law for magnetism
Maxwell–Faraday equation
(Faraday's law of induction)
Ampère's circuital law
(with Maxwell's correction)
Constitutive relations
In order to apply 'Maxwell's macroscopic equations', it is necessary to specify the relations
between displacement field D and E, and the magnetic H-field H and B. These equations specify

the response of bound charge and current to the applied fields and are called constitutive
relations.
Determining the constitutive relationship between the auxiliary fields D and H and the E and B
fields starts with the definition of the auxiliary fields themselves:
where P is the polarization field and M is the magnetization field which are defined in terms of
microscopic bound charges and bound current respectively. Before getting to how to calculate M
and P it is useful to examine some special cases, though.
Without magnetic or dielectric materials
In the absence of magnetic or dielectric materials, the constitutive relations are simple:
where ε0 and μ0 are two universal constants, called the permittivity of free space and permeability
of free space, respectively. Substituting these back into Maxwell's macroscopic equations lead
directly to Maxwell's microscopic equations, except that the currents and charges are replaced
with free currents and free charges. This is expected since there are no bound charges nor
currents.
Isotropic Linear materials
In an (isotropic[7]
) linear material, where P is proportional to E and M is proportional to B the
constitutive relations are also straightforward. In terms of the polarizaton P and the
magnetization M they are:
where χe and χm are the electric and magnetic susceptibilities of a given material respectively. In
terms of D and H the constitutive relations are:
where ε and μ are constants (which depend on the material), called the permittivity and
permeability, respectively, of the material. These are related to the susceptibilities by:

Substituting in the constitutive relations above into Maxwell's equations in linear, dispersionless,
time-invariant materials (differential form only) are:
These are formally identical to the general formulation in terms of E and B (given above),
except that the permittivity of free space was replaced with the permittivity of the material, the
permeability of free space was replaced with the permeability of the material, and only free
charges and currents are included (instead of all charges and currents). Unless that material is
homogeneous in space, ε and μ cannot be factored out of the derivative expressions on the left
sides.
General case
For real-world materials, the constitutive relations are not linear, except approximately.
Calculating the constitutive relations from first principles involves determining how P and M are
created from a given E and B.[note 4]
These relations may be empirical (based directly upon
measurements), or theoretical (based upon statistical mechanics, transport theory or other tools of
condensed matter physics). The detail employed may be macroscopic or microscopic, depending
upon the level necessary to the problem under scrutiny.
In general, though the constitutive relations can usually still be written:
but ε and μ are not, in general, simple constants, but rather functions. Examples are:
Dispersion and absorption where ε and μ are functions of frequency. (Causality does not
permit materials to be nondispersive; see, for example, Kramers–Kronig relations).
Neither do the fields need to be in phase which leads to ε and μ being complex. This also
leads to absorption.
Bi-(an)isotropy where H and D depend on both B and E:[8]
Nonlinearity where ε and μ are functions of E and B.
Anisotropy (such as birefringence or dichroism) which occurs when ε and μ are second-
rank tensors,

Dependence of P and M on E and B at other locations and times. This could be due to
spatial inhomogeneity; for example in a domained structure, heterostructure or a liquid
crystal, or most commonly in the situation where there are simply multiple materials
occupying different regions of space). Or it could be due to a time varying medium or
due to hysteresis. In such cases P and M can be calculated as:[9][10]
in which the permittivity and permeability functions are replaced by integrals over the
more general electric and magnetic susceptibilities.[11]
In practice, some materials properties have a negligible impact in particular circumstances,
permitting neglect of small effects. For example: optical nonlinearities can be neglected for low
field strengths; material dispersion is unimportant when frequency is limited to a narrow
bandwidth; material absorption can be neglected for wavelengths for which a material is
transparent; and metals with finite conductivity often are approximated at microwave or longer
wavelengths as perfect metals with infinite conductivity (forming hard barriers with zero skin
depth of field penetration).
It may be noted that man-made materials can be designed to have customized permittivity and
permeability, such as metamaterials and photonic crystals.
Calculation of constitutive relations
In general, the constitutive equations are theoretically determined by calculating how a molecule
responds to the local fields through the Lorentz force. Other forces may need to be modeled as
well such as lattice vibrations in crystals or bond forces. Including all of the forces leads to
changes in the molecule which are used to calculate P and M as a function of the local fields.
The local fields differ from the applied fields due to the fields produced by the polarization and
magnetization of nearby material; an effect which also needs to be modeled. Further, real
materials are not continuous media; the local fields of real materials vary wildly on the atomic
scale. The fields need to be averaged over a suitable volume to form a continuum approximation.
These continuum approximations often require some type of quantum mechanical analysis such
as quantum field theory as applied to condensed matter physics. See, for example, density
functional theory, Green–Kubo relations and Green's function. Various approximate transport
equations have evolved, for example, the Boltzmann equation or the Fokker–Planck equation or
the Navier–Stokes equations. Some examples where these equations are applied are
magnetohydrodynamics, fluid dynamics, electrohydrodynamics, superconductivity, plasma
modeling. An entire physical apparatus for dealing with these matters has developed. A different
set of homogenization methods (evolving from a tradition in treating materials such as
conglomerates and laminates) are based upon approximation of an inhomogeneous material by a

homogeneous effective medium[12][13]
(valid for excitations with wavelengths much larger than
the scale of the inhomogeneity).[14][15][16][17]
The theoretical modeling of the continuum-approximation properties of many real materials
often rely upon measurement as well,[18]
for example, ellipsometry measurements.
History
Relation between electricity, magnetism, and the speed of light
The relation between electricity, magnetism, and the speed of light can be summarized by the
modern equation:
The left-hand side is the speed of light, and the right-hand side is a quantity related to the
equations governing electricity and magnetism. Although the right-hand side has units of
velocity, it can be inferred from measurements of electric and magnetic forces, which involve no
physical velocities. Therefore, establishing this relationship provided convincing evidence that
light is an electromagnetic phenomenon.
The discovery of this relationship started in 1855, when Wilhelm Eduard Weber and Rudolf
Kohlrausch determined that there was a quantity related to electricity and magnetism, "the ratio
of the absolute electromagnetic unit of charge to the absolute electrostatic unit of charge" (in
modern language, the value ), and determined that it should have units of velocity.
They then measured this ratio by an experiment which involved charging and discharging a
Leyden jar and measuring the magnetic force from the discharge current, and found a value
3.107×108
m/s,[19]
remarkably close to the speed of light, which had recently been measured at 3.14×108
m/s by Hippolyte Fizeau in 1848 and at 2.98×108
m/s by Léon Foucault in 1850.[19]
However, Weber and Kohlrausch did not make the connection
to the speed of light.[19]
Towards the end of 1861 while working on part III of his paper On
Physical Lines of Force, Maxwell travelled from Scotland to London and looked up Weber and
Kohlrausch's results. He converted them into a format which was compatible with his own
writings, and in doing so he established the connection to the speed of light and concluded that
light is a form of electromagnetic radiation.[20]
The term Maxwell's equations
The four modern Maxwell's equations can be found individually throughout his 1861 paper,
derived theoretically using a molecular vortex model of Michael Faraday's "lines of force" and in
conjunction with the experimental result of Weber and Kohlrausch. But it wasn't until 1884 that
Oliver Heaviside,[21]
concurrently with similar work by Willard Gibbs and Heinrich Hertz,[22]
grouped the four together into a distinct set. This group of four equations was known variously

as the Hertz-Heaviside equations and the Maxwell-Hertz equations,[21]
and are sometimes still
known as the Maxwell–Heaviside equations.[23]
Maxwell's contribution to science in producing these equations lies in the correction he made to
Ampère's circuital law in his 1861 paper On Physical Lines of Force. He added the displacement
current term to Ampère's circuital law and this enabled him to derive the electromagnetic wave
equation in his later 1865 paper A Dynamical Theory of the Electromagnetic Field and
demonstrate the fact that light is an electromagnetic wave. This fact was then later confirmed
experimentally by Heinrich Hertz in 1887. The physicist Richard Feynman predicted that, "The
American Civil War will pale into provincial insignificance in comparison with this important
scientific event of the same decade."[24]
The concept of fields was introduced by, among others, Faraday. Albert Einstein wrote:
The precise formulation of the time-space laws was the work of Maxwell. Imagine his feelings
when the differential equations he had formulated proved to him that electromagnetic fields
spread in the form of polarised waves, and at the speed of light! To few men in the world has
such an experience been vouchsafed ... it took physicists some decades to grasp the full
significance of Maxwell's discovery, so bold was the leap that his genius forced upon the
conceptions of his fellow-workers
—(Science, May 24, 1940)
Heaviside worked to eliminate the potentials (electric potential and magnetic potential) that
Maxwell had used as the central concepts in his equations;[21]
this effort was somewhat
controversial,[25]
though it was understood by 1884 that the potentials must propagate at the
speed of light like the fields, unlike the concept of instantaneous action-at-a-distance like the
then conception of gravitational potential.[22]
Modern analysis of, for example, radio antennas,
makes full use of Maxwell's vector and scalar potentials to separate the variables, a common
technique used in formulating the solutions of differential equations. However the potentials can
be introduced by algebraic manipulation of the four fundamental equations.
On Physical Lines of Force
The four modern day Maxwell's equations appeared throughout Maxwell's 1861 paper On
Physical Lines of Force:
1. Equation (56) in Maxwell's 1861 paper is ∇ ⋅ B = 0.
2. Equation (112) is Ampère's circuital law with Maxwell's displacement current added. It is
the addition of displacement current that is the most significant aspect of Maxwell's work
in electromagnetism, as it enabled him to later derive the electromagnetic wave equation
in his 1865 paper A Dynamical Theory of the Electromagnetic Field, and hence show that
light is an electromagnetic wave. It is therefore this aspect of Maxwell's work which
gives the equations their full significance. (Interestingly, Kirchhoff derived the
telegrapher's equations in 1857 without using displacement current. But he did use
Poisson's equation and the equation of continuity which are the mathematical ingredients
of the displacement current. Nevertheless, Kirchhoff believed his equations to be

applicable only inside an electric wire and so he is not credited with having discovered
that light is an electromagnetic wave).
3. Equation (115) is Gauss's law.
4. Equation (54) is an equation that Oliver Heaviside referred to as 'Faraday's law'. This
equation caters for the time varying aspect of electromagnetic induction, but not for the
motionally induced aspect, whereas Faraday's original flux law caters for both
aspects.[26][27]
Maxwell deals with the motionally dependent aspect of electromagnetic
induction, v × B, at equation (77). Equation (77) which is the same as equation (D) in the
original eight Maxwell's equations listed below, corresponds to all intents and purposes to
the modern day force law F = q( E + v × B ) which sits adjacent to Maxwell's equations
and bears the name Lorentz force, even though Maxwell derived it when Lorentz was still
a young boy.
The difference between the B and the H vectors can be traced back to Maxwell's 1855 paper
entitled On Faraday's Lines of Force which was read to the Cambridge Philosophical Society.
The paper presented a simplified model of Faraday's work, and how the two phenomena were
related. He reduced all of the current knowledge into a linked set of differential equations.
Figure of Maxwell's molecular vortex model. For a uniform magnetic field, the field lines point
outward from the display screen, as can be observed from the black dots in the middle of the
hexagons. The vortex of each hexagonal molecule rotates counter-clockwise. The small green
circles are clockwise rotating particles sandwiching between the molecular vortices.
It is later clarified in his concept of a sea of molecular vortices that appears in his 1861 paper On
Physical Lines of Force. Within that context, H represented pure vorticity (spin), whereas B was
a weighted vorticity that was weighted for the density of the vortex sea. Maxwell considered
magnetic permeability µ to be a measure of the density of the vortex sea. Hence the relationship,
1. Magnetic induction current causes a magnetic current density

was essentially a rotational analogy to the linear electric current relationship,
2. Electric convection current
where ρ is electric charge density. B was seen as a kind of magnetic current of vortices aligned in
their axial planes, with H being the circumferential velocity of the vortices. With µ representing
vortex density, it follows that the product of µ with vorticity H leads to the magnetic field
denoted as B.
The electric current equation can be viewed as a convective current of electric charge that
involves linear motion. By analogy, the magnetic equation is an inductive current involving spin.
There is no linear motion in the inductive current along the direction of the B vector. The
magnetic inductive current represents lines of force. In particular, it represents lines of inverse
square law force.
The extension of the above considerations confirms that where B is to H, and where J is to ρ,
then it necessarily follows from Gauss's law and from the equation of continuity of charge that E
is to D. i.e. B parallels with E, whereas H parallels with D.
A Dynamical Theory of the Electromagnetic Field
In 1864 Maxwell published A Dynamical Theory of the Electromagnetic Field in which he
showed that light was an electromagnetic phenomenon. Confusion over the term "Maxwell's
equations" is exacerbated because it is also sometimes used for a set of eight equations that
appeared in Part III of Maxwell's 1864 paper A Dynamical Theory of the Electromagnetic Field,
entitled "General Equations of the Electromagnetic Field,"[28]
a confusion compounded by the
writing of six of those eight equations as three separate equations (one for each of the Cartesian
axes), resulting in twenty equations and twenty unknowns. (As noted above, this terminology is
not common: Modern references to the term "Maxwell's equations" refer to the Heaviside
restatements.)
The eight original Maxwell's equations can be written in modern vector notation as follows:
(A) The law of total currents
(B) The equation of magnetic force
(C) Ampère's circuital law
(D) Electromotive force created by convection, induction, and by static electricity. (This is in
effect the Lorentz force)

(E) The electric elasticity equation
(F) Ohm's law
(G) Gauss's law
(H) Equation of continuity
or
Notation
H is the magnetizing field, which Maxwell called the magnetic intensity.
J is the current density (withJtot being the total current including displacement
current).[note 5]
D is the displacement field (called the electric displacement by Maxwell).
ρ is the free charge density (called the quantity of free electricity by Maxwell).
A is the magnetic potential (called the angular impulse by Maxwell).
E is called the electromotive force by Maxwell. The term electromotive force is
nowadays used for voltage, but it is clear from the context that Maxwell's meaning
corresponded more to the modern term electric field.
υ is the electric potential (which Maxwell also called electric potential).
σ is the electrical conductivity (Maxwell called the inverse of conductivity the specific
resistance, what is now called the resistivity).
It is interesting to note the μv × H term that appears in equation D. Equation D is therefore
effectively the Lorentz force, similarly to equation (77) of his 1861 paper (see above).
When Maxwell derives the electromagnetic wave equation in his 1865 paper, he uses equation D
to cater for electromagnetic induction rather than Faraday's law of induction which is used in
modern textbooks. (Faraday's law itself does not appear among his equations.) However,
Maxwell drops the μv × H term from equation D when he is deriving the electromagnetic wave
equation, as he considers the situation only from the rest frame.
A Treatise on Electricity and Magnetism
In A Treatise on Electricity and Magnetism, an 1873 treatise on electromagnetism written by
James Clerk Maxwell, eleven general equations of the electromagnetic field are listed and these
include the eight that are listed in the 1865 paper.[29]

Maxwell's equations and relativity
Maxwell's original equations are based on the idea that light travels through a sea of molecular
vortices known as the 'luminiferous aether', and that the speed of light has to be respective to the
reference frame of this aether. Measurements designed to measure the speed of the Earth through
the aether conflicted, though.[30]
A more theoretical approach was suggested by Hendrik Lorentz along with George FitzGerald
and Joseph Larmor. Both Larmor (1897) and Lorentz (1899, 1904) derived the Lorentz
transformation (so named by Henri Poincaré) as one under which Maxwell's equations were
invariant. Poincaré (1900) analyzed the coordination of moving clocks by exchanging light
signals. He also established mathematically the group property of the Lorentz transformation
(Poincaré 1905).
Einstein dismissed the aether as unnecessary and concluded that Maxwell's equations predict the
existence of a fixed speed of light, independent of the speed of the observer, and as such he used
Maxwell's equations as the starting point for his special theory of relativity. In doing so, he
established the Lorentz transformation as being valid for all matter and not just Maxwell's
equations. Maxwell's equations played a key role in Einstein's famous paper on special relativity;
for example, in the opening paragraph of the paper, he motivated his theory by noting that a
description of a conductor moving with respect to a magnet must generate a consistent set of
fields irrespective of whether the force is calculated in the rest frame of the magnet or that of the
conductor.[31]
General relativity has also had a close relationship with Maxwell's equations. For example,
Theodor Kaluza and Oskar Klein showed in the 1920s that Maxwell's equations can be derived
by extending general relativity into five dimensions. This strategy of using higher dimensions to
unify different forces remains an active area of research in particle physics.
Modified to include magnetic monopoles
Maxwell's equations of electromagnetism relate the electric and magnetic fields to the motions of
electric charges. The standard form of the equations provide for an electric charge, but posit no
magnetic charge. There is no known magnetic analog of an electron, however recently scientists
have described behavior in a crystalline state of matter known as spin-ice which have
macroscopic behavior like magnetic monopoles.[32][33]
(in accordance with the fact that magnetic
charge has never been seen and may not exist). Except for this, the equations are symmetric
under interchange of electric and magnetic field. In fact, symmetric equations can be written
when all charges are zero, and this is how the wave equation is derived (see immediately above).
Fully symmetric equations can also be written if one allows for the possibility of magnetic
charges.[34]
With the inclusion of a variable for these magnetic charges, say ρm, there will also be
a "magnetic current" variable in the equations, Jm. The extended Maxwell's equations (in cgs-
Gaussian units) are as follows:

Name Without magnetic
monopoles
With magnetic monopoles
(hypothetical)
Gauss's law:
Gauss's law for
magnetism:
Maxwell–Faraday
equation
(Faraday's law of
induction):
Ampère's law
(with Maxwell's
extension):
If magnetic charges do not exist, or if they exist but where they are not present in a region, then
the new variables are zero, and the symmetric equations reduce to the conventional equations of
electromagnetism such as ∇ · B = 0.
Boundary conditions using Maxwell's equations
Like all sets of differential equations, Maxwell's equations cannot be uniquely solved without a
suitable set of boundary conditions[35][36][37]
and initial conditions.[38]
For example, consider a region with no charges and no currents. One particular solution that
satisfies all of Maxwell's equations in that region is that both E and B = 0 everywhere in the
region. This solution is obviously false if there is a charge just outside of the region. In this
particular example, all of the electric and magnetic fields in the interior are due to the charges
outside of the volume. Different charges outside of the volume produce different fields on the
surface of that volume and therefore have a different boundary conditions. In general, knowing
the appropriate boundary conditions for a given region along with the currents and charges in
that region allows one to solve for all the fields everywhere within that region. An example of
this type is a an electromagnetic scattering problem, where an electromagnetic wave originating
outside the scattering region is scattered by a target, and the scattered electromagnetic wave is
analyzed for the information it contains about the target by virtue of the interaction with the
target during scattering.[39]
In some cases, like waveguides or cavity resonators, the solution region is largely isolated from
the universe, for example, by metallic walls, and boundary conditions at the walls define the
fields with influence of the outside world confined to the input/output ends of the structure.[40]
In
other cases, the universe at large sometimes is approximated by an artificial absorbing
boundary,[41][42][43]
or, for example for radiating antennas or communication satellites, these
boundary conditions can take the form of asymptotic limits imposed upon the solution.[44]
In
addition, for example in an optical fiber or thin-film optics, the solution region often is broken up
into subregions with their own simplified properties, and the solutions in each subregion must be
joined to each other across the subregion interfaces using boundary conditions.[45][46][47]
A
particular example of this use of boundary conditions is the replacement of a material with a

volume polarization by a charged surface layer, or of a material with a volume magnetization by
a surface current, as described in the section Bound charge and current.
Following are some links of a general nature concerning boundary value problems: Examples of
boundary value problems, Sturm–Liouville theory, Dirichlet boundary condition, Neumann
boundary condition, mixed boundary condition, Cauchy boundary condition, Sommerfeld
radiation condition. Needless to say, one must choose the boundary conditions appropriate to the
problem being solved. See also Kempel[48]
and the book by Friedman.[49]
Gaussian units
Gaussian units is a popular electromagnetism variant of the centimetre gram second system of
units (cgs). In gaussian units, Maxwell's equations are:[50]
where c is the speed of light in a vacuum. The microscopic equations are:
The relation between electric displacement field, electric field and polarization density is:
And likewise the relation between magnetic induction, magnetic field and total magnetization is:
In the linear approximation, the electric susceptibility and magnetic susceptibility are defined so
that:
,

(Note: although the susceptibilities are dimensionless numbers in both cgs and SI, they differ in
value by a factor of 4π.) The permittivity and permeability are:
,
so that
,
In vacuum, ε = μ = 1, therefore D = E, and B = H.
The force exerted upon a charged particle by the electric field and magnetic field is given by the
Lorentz force equation:
where q is the charge on the particle and v is the particle velocity. This is slightly different from
the SI-unit expression above. For example, the magnetic field B has the same units as the electric
field E.
Some equations in the article are given in Gaussian units but not SI or vice-versa. Fortunately,
there are general rules to convert from one to the other; see the article Gaussian units for details.
Alternative formulations of Maxwell's equations
Special relativity motivated a compact mathematical formulation of Maxwell's equations, in
terms of covariant tensors. Quantum mechanics also motivated other formulations.
For example, consider a conductor moving in the field of a magnet.[51]
In the frame of the
magnet, that conductor experiences a magnetic force. But in the frame of a conductor moving
relative to the magnet, the conductor experiences a force due to an electric field. The following
formulation shows how Maxwell's equations take the same form in any inertial coordinate
system.
Covariant formulation of Maxwell's equations
In special relativity, in order to more clearly express the fact that Maxwell's ('microscopic')
equations take the same form in any inertial coordinate system, Maxwell's equations are written
in terms of four-vectors and tensors in the "manifestly covariant" form. The purely spatial
components of the following are in SI units.
One ingredient in this formulation is the electromagnetic tensor, a rank-2 covariant
antisymmetric tensor combining the electric and magnetic fields:

and the result of raising its indices
The other ingredient is the four-current:
where ρ is the charge density and J is the current density.
With these ingredients, Maxwell's equations can be written:
and
The first tensor equation is an expression of the two inhomogeneous Maxwell's equations,
Gauss's law and Ampere's law with Maxwell's correction. The second equation is an expression
of the two homogeneous equations, Faraday's law of induction and Gauss's law for magnetism.
The second equation is equivalent to
where is the contravariant version of the Levi-Civita symbol, and
is the 4-gradient. In the tensor equations above, repeated indices are summed over according to
Einstein summation convention. We have displayed the results in several common notations.

Upper and lower components of a vector, vα and v
α respectively, are interchanged with the
fundamental tensor g, e.g., g = η = diag(−1, +1, +1, +1).
Alternative covariant presentations of Maxwell's equations also exist, for example in terms of the
four-potential; see Covariant formulation of classical electromagnetism for details.
Potential formulation
In advanced classical mechanics and in quantum mechanics (where it is necessary) it is
sometimes useful to express Maxwell's equations in a 'potential formulation' involving the
electric potential (also called scalar potential), υ, and the magnetic potential, A, (also called
vector potential). These are defined such that:
With these definitions, the two homogeneous Maxwell's equations (Faraday's Law and Gauss's
law for magnetism) are automatically satisfied and the other two (inhomogeneous) equations
give the following equations (for "Maxwell's microscopic equations"):
These equations, taken together, are as powerful and complete as Maxwell's equations.
Moreover, if we work only with the potentials and ignore the fields, the problem has been
reduced somewhat, as the electric and magnetic fields each have three components which need to
be solved for (six components altogether), while the electric and magnetic potentials have only
four components altogether.
Many different choices of A and υ are consistent with a given E and B, making these choices
physically equivalent – a flexibility known as gauge freedom. Suitable choice of A and υ can
simplify these equations, or can adapt them to suit a particular situation.
Four-potential
In the Lorentz gauge, the two equations that represent the potentials can be reduced to one
manifestly Lorentz invariant equation, using four-vectors: the four-current defined by

formed from the current density j and charge density ρ, and the electromagnetic four-potential
defined by
formed from the vector potential A and the scalar potential . The resulting single equation, due
to Arnold Sommerfeld, a generalization of an equation due to Bernhard Riemann and known as
the Riemann–Sommerfeld equation[52]
or the covariant form of the Maxwell equations,[53]
is:
,
where is the d'Alembertian operator, or four-Laplacian, ,
sometimes written , or , where is the four-gradient.
Differential formulations
In free space, where ε = ε0 and μ = μ0 are constant everywhere, Maxwell's equations simplify
considerably once the language of differential geometry and differential forms is used. In what
follows, cgs-Gaussian units, not SI units are used. (To convert to SI, see here.) The electric and
magnetic fields are now jointly described by a 2-form F in a 4-dimensional spacetime manifold.
Maxwell's equations then reduce to the Bianchi identity
where d denotes the exterior derivative — a natural coordinate and metric independent
differential operator acting on forms — and the source equation
where the (dual) Hodge star operator * is a linear transformation from the space of 2-forms to the
space of (4-2)-forms defined by the metric in Minkowski space (in four dimensions even by any
metric conformal to this metric), and the fields are in natural units where 1/4πε0 = 1. Here, the 3-
form J is called the electric current form or current 3-form satisfying the continuity equation
The current 3-form can be integrated over a 3-dimensional space-time region. The physical
interpretation of this integral is the charge in that region if it is spacelike, or the amount of charge
that flows through a surface in a certain amount of time if that region is a spacelike surface cross
a timelike interval. As the exterior derivative is defined on any manifold, the differential form
version of the Bianchi identity makes sense for any 4-dimensional manifold, whereas the source
equation is defined if the manifold is oriented and has a Lorentz metric. In particular the
differential form version of the Maxwell equations are a convenient and intuitive formulation of
the Maxwell equations in general relativity.

In a linear, macroscopic theory, the influence of matter on the electromagnetic field is described
through more general linear transformation in the space of 2-forms. We call
the constitutive transformation. The role of this transformation is comparable to the Hodge
duality transformation. The Maxwell equations in the presence of matter then become:
where the current 3-form J still satisfies the continuity equation dJ = 0.
When the fields are expressed as linear combinations (of exterior products) of basis forms θp,
the constitutive relation takes the form
where the field coefficient functions are antisymmetric in the indices and the constitutive
coefficients are antisymmetric in the corresponding pairs. In particular, the Hodge duality
transformation leading to the vacuum equations discussed above are obtained by taking
which up to scaling is the only invariant tensor of this type that can be defined with the metric.
In this formulation, electromagnetism generalises immediately to any 4-dimensional oriented
manifold or with small adaptations any manifold, requiring not even a metric. Thus the
expression of Maxwell's equations in terms of differential forms leads to a further notational and
conceptual simplification. Whereas Maxwell's Equations could be written as two tensor
equations instead of eight scalar equations, from which the propagation of electromagnetic
disturbances and the continuity equation could be derived with a little effort, using differential
forms leads to an even simpler derivation of these results.
Conceptual insight from this formulation
On the conceptual side, from the point of view of physics, this shows that the second and third
Maxwell equations should be grouped together, be called the homogeneous ones, and be seen as
geometric identities expressing nothing else than: the field F derives from a more "fundamental"
potential A. While the first and last one should be seen as the dynamical equations of motion,

obtained via the Lagrangian principle of least action, from the "interaction term" A J (introduced
through gauge covariant derivatives), coupling the field to matter.
Often, the time derivative in the third law motivates calling this equation "dynamical", which is
somewhat misleading; in the sense of the preceding analysis, this is rather an artifact of breaking
relativistic covariance by choosing a preferred time direction. To have physical degrees of
freedom propagated by these field equations, one must include a kinetic term F *F for A; and
take into account the non-physical degrees of freedom which can be removed by gauge
transformation A → A' = A − dα. See also gauge fixing and Faddeev–Popov ghosts.
Geometric Algebra (GA) formulation
In geometric algebra, Maxwell's equations are reduced to a single equation,
[54]
where F and J are multivectors
and
with the unit pseudoscalar I2 = −1
The GA spatial gradient operator ∇ acts on a vector field, such that
In spacetime algebra using the same geometric product the equation is simply
the spacetime derivative of the electromagnetic field is its source. Here the (non-bold) spacetime
gradient
is a four vector, as is the current density
For a demonstration that the equations given reproduce Maxwell's equations see the main article.

Classical electrodynamics as the curvature of a line bundle
An elegant and intuitive way to formulate Maxwell's equations is to use complex line bundles or
principal bundles with fibre U(1). The connection on the line bundle has a curvature
which is a two-form that automatically satisfies and can be interpreted as a
field-strength. If the line bundle is trivial with flat reference connection d we can write
and F = dA with A the 1-form composed of the electric potential and the magnetic
vector potential.
In quantum mechanics, the connection itself is used to define the dynamics of the system. This
formulation allows a natural description of the Aharonov-Bohm effect. In this experiment, a
static magnetic field runs through a long magnetic wire (e.g., an iron wire magnetized
longitudinally). Outside of this wire the magnetic induction is zero, in contrast to the vector
potential, which essentially depends on the magnetic flux through the cross-section of the wire
and does not vanish outside. Since there is no electric field either, the Maxwell tensor F = 0
throughout the space-time region outside the tube, during the experiment. This means by
definition that the connection is flat there.
However, as mentioned, the connection depends on the magnetic field through the tube since the
holonomy along a non-contractible curve encircling the tube is the magnetic flux through the
tube in the proper units. This can be detected quantum-mechanically with a double-slit electron
diffraction experiment on an electron wave traveling around the tube. The holonomy corresponds
to an extra phase shift, which leads to a shift in the diffraction pattern.[55][56]
Curved spacetime
Traditional formulation
Matter and energy generate curvature of spacetime. This is the subject of general relativity.
Curvature of spacetime affects electrodynamics. An electromagnetic field having energy and
momentum also generates curvature in spacetime. Maxwell's equations in curved spacetime can
be obtained by replacing the derivatives in the equations in flat spacetime with covariant
derivatives. (Whether this is the appropriate generalization requires separate investigation.) The
sourced and source-free equations become (cgs-Gaussian units):
and
Here,

is a Christoffel symbol that characterizes the curvature of spacetime and Dγ is the covariant
derivative.
Formulation in terms of differential forms
The formulation of the Maxwell equations in terms of differential forms can be used without
change in general relativity. The equivalence of the more traditional general relativistic
formulation using the covariant derivative with the differential form formulation can be seen as
follows. Choose local coordinates xα which gives a basis of 1-forms dx
α in every point of the
open set where the coordinates are defined. Using this basis and cgs-Gaussian units we define
The antisymmetric infinitesimal field tensor Fαβ, corresponding to the field 2-form F
The current-vector infinitesimal 3-form J
Here g is as usual the determinant of the metric tensor gαβ. A small computation that uses the
symmetry of the Christoffel symbols (i.e., the torsion-freeness of the Levi Civita connection) and
the covariant constantness of the Hodge star operator then shows that in this coordinate
neighborhood we have:
the Bianchi identity
the source equation
the continuity equation
Notes

1. ^ The quantity we would now call , with units of velocity, was directly measured before
Maxwell's equations, in an 1855 experiment by Wilhelm Eduard Weber and Rudolf Kohlrausch.
They charged a leyden jar (a kind of capacitor), and measured the electrostatic force associated
with the potential; then, they discharged it while measuring the magnetic force from the current in
the discharge-wire. Their result was 3.107×108
m/s, remarkably close to the speed of light. See The story of electrical and magnetic
measurements: from 500 B.C. to the 1940s, by Joseph F. Keithley, p115
2. ^ In some books *e.g., in [4]
), the term effective charge is used instead of total charge, while free
charge is simply called charge.
3. ^ In some books *e.g., in [4]
), the term effective charge is used instead of total charge, while free
charge is simply called charge.
4. ^ The free charges and currents respond to the fields through the Lorentz force law and this
response is calculated at a fundamental level using mechanics. The response of bound charges
and currents is dealt with using grosser methods subsumed under the notions of magnetization
and polarization. Depending upon the problem, one may choose to have no free charges
whatsoever.
5. ^ Here it is noted that a quite different quantity, the magnetic polarization, μ0M by decision of an
international IUPAP commission has been given the same name J. So for the electric current
density, a name with small letters, j would be better. But even then the mathematicians would still
use the large-letter-name J for the corresponding current-twoform (see below).
References
1. ^ a b c J.D. Jackson, "Maxwell's Equations" video glossary entry
2. ^ Principles of physics: a calculus-based text, by R.A. Serway, J.W. Jewett, page 809.
3. ^ David J Griffiths (1999). Introduction to electrodynamics (Third ed.). Prentice Hall. pp. 559–
562. ISBN 013805326X. http://worldcat.org/isbn/013805326X.
4. ^ a b U. Krey and A. Owen's Basic Theoretical Physics (Springer 2007)
5. ^ See David J. Griffiths (1999). Introduction to Electrodynamics (third ed.). Prentice Hall. for a
good description of how P relates to the bound charge.
6. ^ See David J. Griffiths (1999). Introduction to Electrodynamics (third ed.). Prentice Hall. for a
good description of how M relates to the bound current.
7. ^ The generalization to non-isotropic materials is straight forward; simply replace the constants
with tensor quantities.
8. ^ In general materials are bianisotropic. TG Mackay and A Lakhtakia (2010). Electromagnetic
Anisotropy and Bianisotropy: A Field Guide. World Scientific.
http://www.worldscibooks.com/physics/7515.html.
9. ^ Halevi, Peter (1992). Spatial dispersion in solids and plasmas. Amsterdam: North-Holland.
ISBN 978-0444874054.
10. ^ Jackson, John David (1999). Classical Electrodynamics (3rd ed.). New York: Wiley. ISBN 0-
471-30932-X.
11. ^ Note that the 'magnetic susceptibility' term used her is in terms of B and is different from the
standard definition in terms of H.
12. ^ Aspnes, D.E., "Local-field effects and effective-medium theory: A microscopic perspective,"
Am. J. Phys. 50, p. 704-709 (1982).
13. ^ Habib Ammari & Hyeonbae Kang (2006). Inverse problems, multi-scale analysis and effective
medium theory : workshop in Seoul, Inverse problems, multi-scale analysis, and homogenization,
June 22–24, 2005, Seoul National University, Seoul, Korea. Providence RI: American
Mathematical Society. p. 282. ISBN 0821839683.

http://books.google.com/?id=dK7JwVPbUkMC&printsec=frontcover&dq=%22effective+mediu
m%22.
14. ^ O. C. Zienkiewicz, Robert Leroy Taylor, J. Z. Zhu, Perumal Nithiarasu (2005). The Finite
Element Method (Sixth ed.). Oxford UK: Butterworth-Heinemann. p. 550 ff. ISBN 0750663219.
http://books.google.com/?id=rvbSmooh8Y4C&printsec=frontcover&dq=finite+element+inauthor
:Zienkiewicz.
15. ^ N. Bakhvalov and G. Panasenko, Homogenization: Averaging Processes in Periodic Media
(Kluwer: Dordrecht, 1989); V. V. Jikov, S. M. Kozlov and O. A. Oleinik, Homogenization of
Differential Operators and Integral Functionals (Springer: Berlin, 1994).
16. ^ Vitaliy Lomakin, Steinberg BZ, Heyman E, & Felsen LB (2003). "Multiresolution
Homogenization of Field and Network Formulations for Multiscale Laminate Dielectric Slabs".
IEEE Transactions on Antennas and Propagation 51 (10): 2761 ff.
doi:10.1109/TAP.2003.816356. http://www.ece.ucsd.edu/~vitaliy/A8.pdf.
17. ^ AC Gilbert (Ronald R Coifman, Editor) (2000-05). Topics in Analysis and Its Applications:
Selected Theses. Singapore: World Scientific Publishing Company. p. 155. ISBN 9810240945.
http://books.google.com/?id=d4MOYN5DjNUC&printsec=frontcover&dq=homogenization+date
:2000-2009.
18. ^ Edward D. Palik & Ghosh G (1998). Handbook of Optical Constants of Solids. London UK:
Academic Press. p. 1114. ISBN 0125444222.
http://books.google.com/?id=AkakoCPhDFUC&dq=optical+constants+inauthor:Palik.
19. ^ a b c The story of electrical and magnetic measurements: from 500 B.C. to the 1940s, by Joseph
F. Keithley, p115
20. ^ "The Dictionary of Scientific Biography", by Charles Coulston Gillispie
21. ^ a b c but are now universally known as Maxwell's equations. However, in 1940 Einstein referred
to the equations as Maxwell's equations in "The Fundamentals of Theoretical Physics" published
in the Washington periodical Science, May 24, 1940. Paul J. Nahin (2002-10-09). Oliver
Heaviside: the life, work, and times of an electrical genius of the Victorian age. JHU Press.
pp. 108–112. ISBN 9780801869099.
http://books.google.com/?id=e9wEntQmA0IC&pg=PA111&dq=nahin+hertz-heaviside+maxwell-
hertz.
22. ^ a b Jed Z. Buchwald (1994). The creation of scientific effects: Heinrich Hertz and electric
waves. University of Chicago Press. p. 194. ISBN 9780226078885.
http://books.google.com/?id=2bDEvvGT1EYC&pg=PA194&dq=maxwell+faraday+time-
derivative+vector-potential.
23. ^ Myron Evans (2001-10-05). Modern nonlinear optics. John Wiley and Sons. p. 240.
ISBN 9780471389316. http://books.google.com/?id=9p0kK6IG94gC&pg=PA240&dq=maxwell-
heaviside+equations.
24. ^ Crease, Robert. The Great Equations: Breakthroughs in Science from Pythagoras to
Heisenberg, page 133 (2008).
25. ^ Oliver J. Lodge (November 1888). "Sketch of the Electrical Papers in Section A, at the Recent
Bath Meeting of the British Association". Electrical Engineer 7: 535.
26. ^ J. R. Lalanne, F. Carmona, and L. Servant (1999-11). Optical spectroscopies of electronic
absorption. World Scientific. p. 8. ISBN 9789810238612. http://books.google.com/?id=7rWD-
TdxKkMC&pg=PA8&dq=maxwell-faraday+derivative.
27. ^ Roger F. Harrington (2003-10-17). Introduction to Electromagnetic Engineering. Courier
Dover Publications. pp. 49–56. ISBN 9780486432410.
http://books.google.com/?id=ZlC2EV8zvX8C&pg=PR7&dq=maxwell-faraday-equation+law-of-
induction.
28. ^ page 480.
29. ^ http://www.mathematik.tu-darmstadt.de/~bruhn/Original-MAXWELL.htm

30. ^ Experiments like the Michelson-Morley experiment in 1887 showed that the 'aether' moved at
the same speed as Earth. While other experiments, such as measurements of the aberration of
light from stars, showed that the ether is moving relative to earth.
31. ^ "On the Electrodynamics of Moving Bodies". Fourmilab.ch.
http://www.fourmilab.ch/etexts/einstein/specrel/www/. Retrieved 2008-10-19.
32. ^ http://www.sciencemag.org/cgi/content/abstract/1178868
33. ^ http://www.nature.com/nature/journal/v461/n7266/full/nature08500.html
34. ^ "IEEEGHN: Maxwell's Equations". Ieeeghn.org.
http://www.ieeeghn.org/wiki/index.php/Maxwell%27s_Equations. Retrieved 2008-10-19.
35. ^ Peter Monk; ), Peter Monk (Ph.D (2003). Finite Element Methods for Maxwell's Equations.
Oxford UK: Oxford University Press. p. 1 ff. ISBN 0198508883.
http://books.google.com/?id=zI7Y1jT9pCwC&pg=PA1&dq=electromagnetism+%22boundary+c
onditions%22.
36. ^ Thomas B. A. Senior & John Leonidas Volakis (1995-03-01). Approximate Boundary
Conditions in Electromagnetics. London UK: Institution of Electrical Engineers. p. 261 ff.
ISBN 0852968493.
http://books.google.com/?id=eOofBpuyuOkC&pg=PA261&dq=electromagnetism+%22boundary
+conditions%22.
37. ^ T Hagstrom (Björn Engquist & Gregory A. Kriegsmann, Eds.) (1997). Computational Wave
Propagation. Berlin: Springer. p. 1 ff. ISBN 0387948740.
http://books.google.com/?id=EdZefkIOR5cC&pg=PA1&dq=electromagnetism+%22boundary+c
onditions%22.
38. ^ Henning F. Harmuth & Malek G. M. Hussain (1994). Propagation of Electromagnetic Signals.
Singapore: World Scientific. p. 17. ISBN 9810216890.
http://books.google.com/?id=6_CZBHzfhpMC&pg=PA45&dq=electromagnetism+%22initial+co
nditions%22.
39. ^ Fioralba Cakoni; Colton, David L (2006). "The inverse scattering problem for an imperfect
conductor". Qualitative methods in inverse scattering theory. Springer Science & Business. p. 61.
ISBN 3540288449. http://books.google.com/?id=7DqqOjPJetYC&pg=PR6#PPA61,M1.,
Khosrow Chadan et al. (1997). An introduction to inverse scattering and inverse spectral
problems. Society for Industrial and Applied Mathematics. p. 45. ISBN 0898713870.
http://books.google.com/?id=y2rywYxsDEAC&pg=PA45.
40. ^ S. F. Mahmoud (1991). Electromagnetic Waveguides: Theory and Applications applications.
London UK: Institution of Electrical Engineers. Chapter 2. ISBN 0863412327.
http://books.google.com/?id=toehQ7vLwAMC&pg=PA2&dq=Maxwell%27s+equations+wavegu
ides.
41. ^ Jean-Michel Lourtioz (2005-05-23). Photonic Crystals: Towards Nanoscale Photonic Devices.
Berlin: Springer. p. 84. ISBN 354024431X.
http://books.google.com/?id=vSszZ2WuG_IC&pg=PA84&dq=electromagnetism+boundary++-
element.
42. ^ S. G. Johnson, Notes on Perfectly Matched Layers, online MIT course notes (Aug. 2007).
43. ^ Taflove A & Hagness S C (2005). Computational Electrodynamics: The Finite-difference
Time-domain Method. Boston MA: Artech House. Chapters 6 & 7. ISBN 1580538320.
http://www.amazon.com/gp/reader/1580538320/ref=sib_dp_pop_toc?ie=UTF8&p=S008#reader-
link.
44. ^ David M Cook (2002). The Theory of the Electromagnetic Field. Mineola NY: Courier Dover
Publications. p. 335 ff. ISBN 0486425673. http://books.google.com/?id=bI-
ZmZWeyhkC&pg=RA1-PA335&dq=electromagnetism+infinity+boundary+conditions.
45. ^ Korada Umashankar (1989-09). Introduction to Engineering Electromagnetic Fields.
Singapore: World Scientific. p. §10.7; pp. 359ff. ISBN 9971509210.

http://books.google.com/?id=qp5qHvB_mhcC&pg=PA359&dq=electromagnetism+%22boundar
y+conditions%22.
46. ^ Joseph V. Stewart (2001). Intermediate Electromagnetic Theory. Singapore: World Scientific.
Chapter III, pp. 111 ff Chapter V, Chapter VI. ISBN 9810244703.
http://books.google.com/?id=mwLI4nQ0thQC&printsec=frontcover&dq=intitle:Intermediate+inti
tle:electromagnetic+intitle:theory.
47. ^ Tai L. Chow (2006). Electromagnetic theory. Sudbury MA: Jones and Bartlett. p. 333ff and
Chapter 3: pp. 89ff. ISBN 0-7637-3827-1.
http://books.google.com/?id=dpnpMhw1zo8C&pg=PA153&dq=isbn=0763738271.
48. ^ John Leonidas Volakis, Arindam Chatterjee & Leo C. Kempel (1998). Finite element method
for electromagnetics : antennas, microwave circuits, and scattering applications. New York:
Wiley IEEE. p. 79 ff. ISBN 0780334256.
http://books.google.com/?id=55q7HqnMZCsC&pg=PA79&dq=electromagnetism+%22boundary
+conditions%22.
49. ^ Bernard Friedman (1990). Principles and Techniques of Applied Mathematics. Mineola NY:
Dover Publications. ISBN 0486664449. http://www.amazon.com/Principles-Techniques-Applied-
Mathematics-
Friedman/dp/0486664449/ref=sr_1_1?ie=UTF8&s=books&qisbn=1207010487&sr=1-1.
50. ^ Littlejohn, Robert (Fall 2007). "Gaussian, SI and Other Systems of Units in Electromagnetic
Theory" (PDF). Physics 221A, University of California, Berkeley lecture notes.
http://bohr.physics.berkeley.edu/classes/221/0708/notes/emunits.pdf. Retrieved 2008-05-06.
51. ^ Albert Einstein (1905) On the electrodynamics of moving bodies
52. ^ Carver A. Mead (2002-08-07). Collective Electrodynamics: Quantum Foundations of
Electromagnetism. MIT Press. pp. 37–38. ISBN 9780262632607.
http://books.google.com/?id=GkDR4e2lo2MC&pg=PA37&dq=Riemann+Summerfeld.
53. ^ Frederic V. Hartemann (2002). High-field electrodynamics. CRC Press. p. 102.
ISBN 9780849323782.
http://books.google.com/?id=tIkflVrfkG0C&pg=PA102&dq=d%27Alembertian+covariant-
form+maxwell-lorentz.
54. ^ Oersted Medal Lecture David Hestenes (Am. J. Phys. 71 (2), February 2003, pp. 104--121)
Online:http://geocalc.clas.asu.edu/html/Oersted-ReformingTheLanguage.html p26
55. ^ M. Murray (5 September 2008). "Line Bundles. Honours 1996". University of Adelaide.
http://www.maths.adelaide.edu.au/michael.murray/line_bundles.pdf. Retrieved 2010-11-19.
56. ^ R. Bott (1985). "On some recent interactions between mathematics and physics". Canadian
Mathematical Bulletin 28 (2): 129–164.
Right-hand rule
The left-handed orientation is shown on the left, and the right-handed on the right.

Use of right hand.
In mathematics and physics, the right-hand rule is a common mnemonic for understanding
notation conventions for vectors in 3 dimensions. It was invented for use in electromagnetism by
British physicist John Ambrose Fleming in the late 19th century.[1][2]
When choosing three vectors that must be at right angles to each other, there are two distinct
solutions, so when expressing this idea in mathematics, one must remove the ambiguity of which
solution is meant.
There are variations on the mnemonic depending on context, but all variations are related to the
one idea of choosing a convention.
Direction associated with an ordered pair of directions
One form of the right-hand rule is used in situations in which an ordered operation must be
performed on two vectors a and b that has a result which is a vector c perpendicular to both a and
b. The most common example is the vector cross product. The right-hand rule imposes the
following procedure for choosing one of the two directions.
With the thumb, index, and middle fingers at right angles to each other (with the index
finger pointed straight), the middle finger points in the direction of c when the thumb
represents a and the index finger represents b.
Other (equivalent) finger assignments are possible. For example, the first (index) finger can
represent a, the first vector in the product; the second (middle) finger, b, the second vector; and
the thumb, c, the product.[3]
Direction associated with a rotation

Prediction of direction of field (B), given that the current I flows in the direction of the thumb.
A different form of the right-hand rule, sometimes called the right-hand grip rule, is used in
situations where a vector must be assigned to the rotation of a body, a magnetic field or a fluid.
Alternatively, when a rotation is specified by a vector, and it is necessary to understand the way
in which the rotation occurs, the right-hand grip rule is applicable.
This version of the rule is used in two complementary applications of Ampère's circuital law:
1. An electric current passes through a solenoid, resulting in a magnetic field. When you
wrap your right hand around the solenoid with your fingers in the direction of the
conventional current, your thumb points in the direction of the magnetic north pole.
2. An electric current passes through a straight wire. Here, the thumb points in the direction
of the conventional current (from positive to negative), and the fingers point in the
direction of the magnetic lines of flux.
The principle is also used to determine the direction of the torque vector. If you grip the
imaginary axis of rotation of the rotational force so that your fingers point in the direction of the
force, then the extended thumb points in the direction of the torque vector.
The right hand grip rule is a convention derived from the right-hand rule convention for vectors.
When applying the rule to current in a straight wire for example, the direction of the magnetic
field (counterclockwise instead of clockwise when viewed from the tip of the thumb) is a result
of this convention and not an underlying physical phenomenon
Applications
The first form of the rule is used to determine the direction of the cross product of two vectors.
This leads to widespread use in physics, wherever the cross product occurs. A list of physical
quantities whose directions are related by the right-hand rule is given below. (Some of these are
related only indirectly to cross products, and use the second form.)
The angular velocity of a rotating object and the rotational velocity of any point on the
object
A torque, the force that causes it, and the position of the point of application of the force

A magnetic field, the position of the point where it is determined, and the electric current
(or change in electric flux) that causes it
A magnetic field in a coil of wire and the electric current in the wire
The force of a magnetic field on a charged particle, the magnetic field itself, and the
velocity of the object
The vorticity at any point in the field of flow of a fluid
The induced current from motion in a magnetic field (known as Fleming's right hand
rule)
Symmetry
Vector Right-hand Right-hand Right-hand Left-hand Left-hand Left-Hand
a, x or I Thumb Fingers or
palm First or Index Thumb
Fingers or
palm First or index
b, y or
B First or index Thumb
Fingers or
palm
Fingers or
palm First or index Thumb
c, z or F Fingers or
palm First or index Thumb First or index Thumb
Fingers or
palm
Ohm's law
V, I, and R, the parameters of Ohm's law.
Ohm's law states that the current through a conductor between two points is directly
proportional to the potential difference or voltage across the two points, and inversely
proportional to the resistance between them.[1]
The mathematical equation that describes this relationship is:[2]
where I is the current through the resistance in units of amperes, V is the potential difference
measured across the resistance in units of volts, and R is the resistance of the conductor in units

of ohms. More specifically, Ohm's law states that the R in this relation is constant, independent
of the current.[3]
The law was named after the German physicist Georg Ohm, who, in a treatise published in 1827,
described measurements of applied voltage and current through simple electrical circuits
containing various lengths of wire. He presented a slightly more complex equation than the one
above (see History section below) to explain his experimental results. The above equation is the
modern form of Ohm's law.
In physics, the term Ohm's law is also used to refer to various generalizations of the law
originally formulated by Ohm. The simplest example of this is:
where J is the current density at a given location in a resistive material, E is the electric field at
that location, and σ is a material dependent parameter called the conductivity. This reformulation
of Ohm's law is due to Gustav Kirchhoff.[4]
Microscopic origins of Ohm's law
Drude Model electrons (shown here in blue) constantly bounce between heavier, stationary
crystal ions (shown in red).
The dependence of the current density on the applied electric field is essentially quantum
mechanical in nature; (see Classical and quantum conductivity.) A qualitative description leading
to Ohm's law can be based upon classical mechanics using the Drude model developed by Paul
Drude in 1900.[5][6]
The Drude model treats electrons (or other charge carriers) like pinballs bouncing between the
ions that make up the structure of the material. Electrons will be accelerated in the opposite
direction to the electric field by the average electric field at their location. With each collision,
though, the electron is deflected in a random direction with a velocity that is much larger than the
velocity gained by the electric field. The net result is that electrons take a tortuous path due to the
collisions, but generally drift in a direction opposing the electric field.

The drift velocity then determines the electric current density and its relationship to E and is
independent of the collisions. Drude calculated the average drift velocity from p = −eEτ where p
is the average momentum, −e is the charge of the electron and τ is the average time between the
collisions. Since both the momentum and the current density are proportional to the drift
velocity, the current density becomes proportional to the applied electric field; this leads to
Ohm's law.
Hydraulic analogy
A hydraulic analogy is sometimes used to describe Ohm's Law. Water pressure, measured by
pascals (or PSI), is the analog of voltage because establishing a water pressure difference
between two points along a (horizontal) pipe causes water to flow. Water flow rate, as in liters
per second, is the analog of current, as in coulombs per second. Finally, flow restrictors — such
as apertures placed in pipes between points where the water pressure is measured — are the
analog of resistors. We say that the rate of water flow through an aperture restrictor is
proportional to the difference in water pressure across the restrictor. Similarly, the rate of flow of
electrical charge, that is, the electric current, through an electrical resistor is proportional to the
difference in voltage measured across the resistor.
Flow and pressure variables can be calculated in fluid flow network with the use of the hydraulic
ohm analogy.[7][8]
The method can be applied to both steady and transient flow situations. In the
linear laminar flow region, Poiseuille's law describes the hydraulic resistance of a pipe, but in the
turbulent flow region the pressure–flow relations become nonlinear.
Circuit analysis
Ohm's law triangle
In circuit analysis, three equivalent expressions of Ohm's law are used interchangeably:
Each equation is quoted by some sources as the defining relationship of Ohm's law,[2][9][10]
or all
three are quoted,[11]
or derived from a proportional form,[12]
or even just the two that do not
correspond to Ohm's original statement may sometimes be given.[13][14]
The interchangeability of the equation may be represented by a triangle, where V (voltage) is
placed on the top section, the I (current) is placed to the left section, and the R (resistance) is

placed to the right. The line that divides the left and right sections indicate multiplication, and the
divider between the top and bottom sections indicates division (hence the division bar).
Resistive circuits
Resistors are circuit elements that impede the passage of electric charge in agreement with Ohm's
law, and are designed to have a specific resistance value R. In a schematic diagram the resistor is
shown as a zig-zag symbol. An element (resistor or conductor) that behaves according to Ohm's
law over some operating range is referred to as an ohmic device (or an ohmic resistor) because
Ohm's law and a single value for the resistance suffice to describe the behavior of the device
over that range.
Ohm's law holds for circuits containing only resistive elements (no capacitances or inductances)
for all forms of driving voltage or current, regardless of whether the driving voltage or current is
constant (DC) or time-varying such as AC. At any instant of time Ohm's law is valid for such
circuits.
Resistors which are in series or in parallel may be grouped together into a single "equivalent
resistance" in order to apply Ohm's law in analyzing the circuit. This application of Ohm's law is
illustrated with examples in "How To Analyze Resistive Circuits Using Ohm's Law" on
wikiHow.
Reactive circuits with time-varying signals
When reactive elements such as capacitors, inductors, or transmission lines are involved in a
circuit to which AC or time-varying voltage or current is applied, the relationship between
voltage and current becomes the solution to a differential equation, so Ohm's law (as defined
above) does not directly apply since that form contains only resistances having value R, not
complex impedances which may contain capacitance ("C") or inductance ("L").
Equations for time-invariant AC circuits take the same form as Ohm's law, however, the
variables are generalized to complex numbers and the current and voltage waveforms are
complex exponentials.[15]
In this approach, a voltage or current waveform takes the form Aest, where t is time, s is a
complex parameter, and A is a complex scalar. In any linear time-invariant system, all of the
currents and voltages can be expressed with the same s parameter as the input to the system,
allowing the time-varying complex exponential term to be canceled out and the system described
algebraically in terms of the complex scalars in the current and voltage waveforms.
The complex generalization of resistance is impedance, usually denoted Z; it can be shown that
for an inductor,
and for a capacitor,

We can now write,
where V and I are the complex scalars in the voltage and current respectively and Z is the
complex impedance.
This form of Ohm's law, with Z taking the place of R, generalizes the simpler form. When Z is
complex, only the real part is responsible for dissipating heat.
In the general AC circuit, Z varies strongly with the frequency parameter s, and so also will the
relationship between voltage and current.
For the common case of a steady sinusoid, the s parameter is taken to be jω, corresponding to a
complex sinusoid Aejωt. The real parts of such complex current and voltage waveforms describe
the actual sinusoidal currents and voltages in a circuit, which can be in different phases due to
the different complex scalars.
Linear approximations
Ohm's law is one of the basic equations used in the analysis of electrical circuits. It applies to
both metal conductors and circuit components (resistors) specifically made for this behaviour.
Both are ubiquitous in electrical engineering. Materials and components that obey Ohm's law are
described as "ohmic" [16]
which means they produce the same value for resistance (R = V/I)
regardless of the value of V or I which is applied and whether the applied voltage or current is
DC (direct current) of either positive or negative polarity or AC (alternating current).
In a true ohmic device, the same value of resistance will be calculated from R = V/I regardless of
the value of the applied voltage V. That is, the ratio of V/I is constant, and when current is
plotted as a function of voltage the curve is linear (a straight line). If voltage is forced to some
value V, then that voltage V divided by measured current I will equal R. Or if the current is
forced to some value I, then the measured voltage V divided by that current I is also R. Since the
plot of I versus V is a straight line, then it is also true that for any set of two different voltages V1
and V2 applied across a given device of resistance R, producing currents I1 = V1/R and I2 = V2/R,
that the ratio (V1-V2)/(I1-I2) is also a constant equal to R. The operator "delta" (Δ) is used to
represent a difference in a quantity, so we can write ΔV = V1-V2 and ΔI = I1-I2. Summarizing, for
any truly ohmic device having resistance R, V/I = ΔV/ΔI = R for any applied voltage or current
or for the difference between any set of applied voltages or currents.

Plot of I–V curve of an ideal p-n junction diode at 1μA reverse leakage current. Failure of the
device to follow Ohm's law is clearly shown since the curve is not a straight line.
There are, however, components of electrical circuits which do not obey Ohm's law; that is, their
relationship between current and voltage (their I–V curve) is nonlinear. An example is the p-n
junction diode (curve at right). As seen in the figure, the current does not increase linearly with
applied voltage for a diode. One can determine a value of current (I) for a given value of applied
voltage (V) from the curve, but not from Ohm's law, since the value of "resistance" is not
constant as a function of applied voltage. Further, the current only increases significantly if the
applied voltage is positive, not negative. The ratio V/I for some point along the nonlinear curve is
sometimes called the static, or chordal, or DC, resistance[17][18]
, but as seen in the figure the
value of total V over total I varies depending on the particular point along the nonlinear curve
which is chosen. This means the "DC resistance" V/I at some point on the curve is not the same
as what would be determined by applying an AC signal having peak amplitude ΔV volts or ΔI
amps centered at that same point along the curve and measuring ΔV/ΔI. However, in some diode
applications, the AC signal applied to the device is small and it is possible to analyze the circuit
in terms of the dynamic, small-signal, or incremental resistance, defined as the one over the
slope of the V–I curve at the average value (DC operating point) of the voltage (that is, one over
the derivative of current with respect to voltage). For sufficiently small signals, the dynamic
resistance allows the Ohm's law small signal resistance to be calculated as approximately one
over the slope of a line drawn tangentially to the V-I curve at the DC operating point.[19]
Temperature effects
Ohm's law has sometimes been stated as, "for a conductor in a given state, the electromotive
force is proportional to the current produced." That is, that the resistance, the ratio of the applied
electromotive force (or voltage) to the current, "does not vary with the current strength ." The
qualifier "in a given state" is usually interpreted as meaning "at a constant temperature," since
the resistivity of materials is usually temperature dependent. Because the conduction of current is
related to Joule heating of the conducting body, according to Joule's first law, the temperature of
a conducting body may change when it carries a current. The dependence of resistance on
temperature therefore makes resistance depend upon the current in a typical experimental setup,
making the law in this form difficult to directly verify. Maxwell and others worked out several
methods to test the law experimentally in 1876, controlling for heating effects.[20]
Relation to heat conductions

Ohm's principle predicts the flow of electrical charge (i.e. current) in electrical conductors when
subjected to the influence of voltage differences; Jean-Baptiste-Joseph Fourier's principle
predicts the flow of heat in heat conductors when subjected to the influence of temperature
differences.
The same equation describes both phenomena, the equation's variables taking on different
meanings in the two cases. Specifically, solving a heat conduction (Fourier) problem with
temperature (the driving "force") and flux of heat (the rate of flow of the driven "quantity", i.e.
heat energy) variables also solves an analogous electrical conduction (Ohm) problem having
electric potential (the driving "force") and electric current (the rate of flow of the driven
"quantity", i.e. charge) variables.
The basis of Fourier's work was his clear conception and definition of thermal conductivity. He
assumed that, all else being the same, the flux of heat is strictly proportional to the gradient of
temperature. Although undoubtedly true for small temperature gradients, strictly proportional
behavior will be lost when real materials (e.g. ones having a thermal conductivity that is a
function of temperature) are subjected to large temperature gradients.
A similar assumption is made in the statement of Ohm's law: other things being alike, the
strength of the current at each point is proportional to the gradient of electric potential. The
accuracy of the assumption that flow is proportional to the gradient is more readily tested, using
modern measurement methods, for the electrical case than for the heat case.
Other versions of Ohm's law
Ohm's law, in the form above, is an extremely useful equation in the field of electrical/electronic
engineering because it describes how voltage, current and resistance are interrelated on a
"macroscopic" level, that is, commonly, as circuit elements in an electrical circuit. Physicists
who study the electrical properties of matter at the microscopic level use a closely related and
more general vector equation, sometimes also referred to as Ohm's law, having variables that are
closely related to the V, I, and R scalar variables of Ohm's law, but are each functions of position
within the conductor. Physicists often use this continuum form of Ohm's Law:[21]
where "E" is the electric field vector with units of volts per meter (analogous to "V" of Ohm's
law which has units of volts), "J" is the current density vector with units of amperes per unit area
(analogous to "I" of Ohm's law which has units of amperes), and "ρ" (Greek "rho") is the
resistivity with units of ohm·meters (analogous to "R" of Ohm's law which has units of ohms).
The above equation is sometimes written[22]
as J = σE where "σ" is the conductivity which is the
reciprocal of ρ.

Current flowing through a uniform cylindrical conductor (such as a round wire) with a uniform
field applied.
The potential difference between two points is defined as:[23]
with the element of path along the integration of electric field vector E. If the applied E field
is uniform and oriented along the length of the conductor as shown in the figure, then defining
the voltage V in the usual convention of being opposite in direction to the field (see figure), and
with the understanding that the voltage V is measured differentially across the length of the
conductor allowing us to drop the Δ symbol, the above vector equation reduces to the scalar
equation:
Since the E field is uniform in the direction of wire length, for a conductor having uniformly
consistent resistivity ρ, the current density J will also be uniform in any cross-sectional area and
oriented in the direction of wire length, so we may write:[24]
Substituting the above 2 results (for E and J respectively) into the continuum form shown at the
beginning of this section:
The electrical resistance of a uniform conductor is given in terms of resistivity by:[24]

where l is the length of the conductor in SI units of meters, a is the cross-sectional area (for a
round wire a = πr2 if r is radius) in units of meters squared, and ρ is the resistivity in units of
ohm·meters.
After substitution of R from the above equation into the equation preceding it, the continuum
form of Ohm's law for a uniform field (and uniform current density) oriented along the length of
the conductor reduces to the more familiar form:
A perfect crystal lattice, with low enough thermal motion and no deviations from periodic
structure, would have no resistivity,[25]
but a real metal has crystallographic defects, impurities,
multiple isotopes, and thermal motion of the atoms. Electrons scatter from all of these, resulting
in resistance to their flow.
The more complex generalized forms of Ohm's law are important to condensed matter physics,
which studies the properties of matter and, in particular, its electronic structure. In broad terms,
they fall under the topic of constitutive equations and the theory of transport coefficients.
Magnetic effects
The continuum form of the equation is only valid in the reference frame of the conducting
material. If the material is moving at velocity v relative to a magnetic field B, a term must be
added as follows:
See Lorentz force for more on this and Hall effect for some other implications of a magnetic
field. This equation is not a modification to Ohm's law. Rather, it is analogous in circuit analysis
terms to taking into account inductance as well as resistance.
History
In January 1781, before Georg Ohm's work, Henry Cavendish experimented with Leyden jars
and glass tubes of varying diameter and length filled with salt solution. He measured the current
by noting how strong a shock he felt as he completed the circuit with his body. Cavendish wrote
that the "velocity" (current) varied directly as the "degree of electrification" (voltage). He did not
communicate his results to other scientists at the time,[26]
and his results were unknown until
Maxwell published them in 1879.[27]
Ohm did his work on resistance in the years 1825 and 1826, and published his results in 1827 as
the book Die galvanische Kette, mathematisch bearbeitet (The galvanic Circuit investigated
mathematically).[28]
He drew considerable inspiration from Fourier's work on heat conduction in
the theoretical explanation of his work. For experiments, he initially used voltaic piles, but later
used a thermocouple as this provided a more stable voltage source in terms of internal resistance
and constant potential difference. He used a galvanometer to measure current, and knew that the

voltage between the thermocouple terminals was proportional to the junction temperature. He
then added test wires of varying length, diameter, and material to complete the circuit. He found
that his data could be modeled through the equation
where x was the reading from the galvanometer, l was the length of the test conductor, a
depended only on the thermocouple junction temperature, and b was a constant of the entire
setup. From this, Ohm determined his law of proportionality and published his results.
Ohm's law was probably the most important of the early quantitative descriptions of the physics
of electricity. We consider it almost obvious today. When Ohm first published his work, this was
not the case; critics reacted to his treatment of the subject with hostility. They called his work a
"web of naked fancies"[29]
and the German Minister of Education proclaimed that "a professor
who preached such heresies was unworthy to teach science."[30]
The prevailing scientific
philosophy in Germany at the time asserted that experiments need not be performed to develop
an understanding of nature because nature is so well ordered, and that scientific truths may be
deduced through reasoning alone. Also, Ohm's brother Martin, a mathematician, was battling the
German educational system. These factors hindered the acceptance of Ohm's work, and his work
did not become widely accepted until the 1840s. Fortunately, Ohm received recognition for his
contributions to science well before he died.
In the 1850s, Ohm's law was known as such, and was widely considered proved, and alternatives
such as "Barlow's law" discredited, in terms of real applications to telegraph system design, as
discussed by Samuel F. B. Morse in 1855.[31]
While the old term for electrical conductance, the mho (the inverse of the resistance unit ohm), is
still used, a new name, the siemens, was adopted in 1971, honoring Ernst Werner von Siemens.
The siemens is preferred in formal papers.
In the 1920s, it was discovered that the current through an ideal resistor actually has statistical
fluctuations, which depend on temperature, even when voltage and resistance are exactly
constant; this fluctuation, now known as Johnson–Nyquist noise, is due to the discrete nature of
charge. This thermal effect implies that measurements of current and voltage that are taken over
sufficiently short periods of time will yield ratios of V/I that fluctuate from the value of R
implied by the time average or ensemble average of the measured current; Ohm's law remains
correct for the average current, in the case of ordinary resistive materials.
Ohm's work long preceded Maxwell's equations and any understanding of frequency-dependent
effects in AC circuits. Modern developments in electromagnetic theory and circuit theory do not
contradict Ohm's law when they are evaluated within the appropriate limits.
References

1. ^ Consoliver, Earl L., and Mitchell, Grover I. (1920). Automotive ignition systems. McGraw-Hill.
p. 4.
http://books.google.com/?id=_dYNAAAAYAAJ&pg=PA4&dq=ohm%27s+law+current+proport
ional+voltage+resistance.
2. ^ a b Robert A. Millikan and E. S. Bishop (1917). Elements of Electricity. American Technical
Society. p. 54.
http://books.google.com/?id=dZM3AAAAMAAJ&pg=PA54&dq=%22Ohm%27s+law%22++cur
rent+directly+proportional.
3. ^ Oliver Heaviside (1894). Electrical papers. 1. Macmillan and Co. p. 283. ISBN 0821828401.
http://books.google.com/?id=lKV-
AAAAMAAJ&pg=PA284&dq=ohm%27s+law+constant+ratio&q=ohm's%20law%20constant%
20ratio.
4. ^ Olivier Darrigol, Electrodynamics from Ampère to Einstein, p.70, Oxford University Press,
2000 ISBN 0198505949.
5. ^ Drude, Paul (1900). "Zur Elektronentheorie der metalle". Annalen der Physik 306 (3): 566.
doi:10.1002/andp.19003060312. http://www3.interscience.wiley.com/cgi-
bin/fulltext/112485959/PDFSTART.
6. ^ Drude, Paul (1900). "Zur Elektronentheorie der Metalle; II. Teil. Galvanomagnetische und
thermomagnetische Effecte". Annalen der Physik 308 (11): 369. doi:10.1002/andp.19003081102.
http://www3.interscience.wiley.com/cgi-bin/fulltext/112485893/PDFSTART.
7. ^ A. Akers, M. Gassman, & R. Smith (2006). Hydraulic Power System Analysis. New York:
Taylor & Francis. Chapter 13. ISBN 0-8247-9956-9.
http://books.google.com/?id=Uo9gpXeUoKAC&pg=PA299&dq=ohm+intitle:Hydraulic+intitle:P
ower+intitle:System+intitle:Analysis.
8. ^ A. Esposito, "A Simplified Method for Analyzing Circuits by Analogy", Machine Design,
October 1969, pp. 173–177.
9. ^ James William Nilsson and Susan A. Riedel (2008). Electric circuits. Prentice Hall. p. 29.
ISBN 9780131989252.
http://books.google.com/?id=sxmM8RFL99wC&pg=PA29&dq=%22Ohm%27s+law+expresses+
the+voltage%22++%22V+%3D+iR%22.
10. ^ Alvin M. Halpern and Erich Erlbach (1998). Schaum's outline of theory and problems of
beginning physics II. McGraw-Hill Professional. p. 140. ISBN 9780070257078.
http://books.google.com/?id=vN2chIay624C&pg=PA140&dq=%22Ohm%27s+law+that+R%3D
+V/I+is+a+constant%22.
11. ^ Dale R. Patrick and Stephen W. Fardo (1999). Understanding DC circuits. Newnes. p. 96.
ISBN 9780750671101.
http://books.google.com/?id=wyC5SFtZskMC&pg=PA96&dq=%22Ohm%27s+law%22+%22R+
%3D%22+%22V+%3D%22+%22I+%3D%22.
12. ^ Thomas O'Conor Sloane (1909). Elementary electrical calculations. D. Van Nostrand Co.
p. 41.
http://books.google.com/?id=e89IAAAAIAAJ&pg=PA41&dq=R%3D+%22Ohm%27s+law%22
+proportional.
13. ^ Linnaeus Cumming (1902). Electricity treated experimentally for the use of schools and
students. Longman's Green and Co. p. 220.
http://books.google.com/?id=3iUJAAAAIAAJ&pg=PA220&dq=V%3DIR+%22Ohm%27s+law
%22.
14. ^ Benjamin Stein (1997). Building technology (2nd ed.). John Wiley and Sons. p. 169.
ISBN 9780471593195.
http://books.google.com/?id=J_RSbj_KzAQC&pg=PA169&dq=%22Ohm%27s+law+that+V%3
D%22.

15. ^ Rajendra Prasad (2006). Fundamentals of Electrical Engineering. Prentice-Hall of India.
ISBN 9788120327290.
http://books.google.com/?id=nsmcbzOJU3kC&pg=PA140&dq=ohm%27s-
law+complex+exponentials.
16. ^ Hughes, E, Electrical Technology, pp10, Longmans, 1969.
17. ^ Forbes T. Brown (2006). Engineering System Dynamics. CRC Press. p. 43.
ISBN 9780849396489.
http://books.google.com/?id=UzqX4j9VZWcC&pg=PA43&dq=%22chordal+resistance%22.
18. ^ Kenneth L. Kaiser (2004). Electromagnetic Compatibility Handbook. CRC Press. pp. 13–52.
ISBN 9780849320873.
http://books.google.com/?id=nZzOAsroBIEC&pg=PT1031&dq=%22static+resistance%22+%22
dynamic+resistance%22+nonlinear.
19. ^ Horowitz, Paul; Winfield Hill (1989). The Art of Electronics (2nd ed.). Cambridge University
Press. p. 13. ISBN 0-521-37095-7.
http://books.google.com/?id=bkOMDgwFA28C&pg=PA13&dq=small-
signal+%22dynamic+resistance%22.
20. ^ Normal Lockyer, ed (September 21, 1876). "Reports". Nature (Macmillan Journals Ltd) 14:
452. http://books.google.com/?id=-8gKAAAAYAAJ&pg=PA452&dq=ohm%27s-
law+temperature&q=ohm's-law%20temperature.
21. ^ Lerner, Lawrence S. (1977). Physics for scientists and engineers. Jones & Bartlett. p. 736.
ISBN 9780763704605. http://books.google.com/?id=Nv5GAyAdijoC&pg=PA736.
22. ^ Seymour J, Physical Electronics, Pitman, 1972, pp 53–54
23. ^ Lerner L, Physics for scientists and engineers, Jones & Bartlett, 1997, pp. 685–686
24. ^ a b Lerner L, Physics for scientists and engineers, Jones & Bartlett, 1997, pp. 732–733
25. ^ Seymour J, Physical Electronics, pp 48–49, Pitman, 1972
26. ^ "Electricity". Encyclopedia Britannica. 1911. http://www.1911encyclopedia.org/Electricity.
27. ^ Sanford P. Bordeau (1982) Volts to Hertz...the Rise of Electricity. Burgess Publishing
Company, Minneapolis, MN. pp.86–107, ISBN 0-8087-4908-0
28. ^ G. S. Ohm (1827). Die galvanische Kette, mathematisch bearbeitet. Berlin: T. H. Riemann.
http://www.ohm-hochschule.de/bib/textarchiv/Ohm.Die_galvanische_Kette.pdf.
29. ^ Davies, B, "A web of naked fancies?", Physics Education 15 57–61, Institute of Physics, Issue
1, Jan 1980 [1]
30. ^ Hart, IB, Makers of Science, London, Oxford University Press, 1923. p. 243. [2]
31. ^ Taliaferro Preston (1855). Shaffner's Telegraph Companion: Devoted to the Science and Art of
the Morse Telegraph. Vol.2. Pudney & Russell.
http://books.google.com/?id=TDEOAAAAYAAJ&pg=RA1-PA43&dq=ohm%27s-law+date:0-
1860.
Kirchhoff's circuit laws
Kirchhoff's circuit laws are two equalities that deal with the conservation of charge and energy
in electrical circuits, and were first described in 1845 by Gustav Kirchhoff. Widely used in
electrical engineering, they are also called Kirchhoff's rules or simply Kirchhoff's laws (see also
Kirchhoff's laws for other meanings of that term).
Both circuit rules can be directly derived from Maxwell's equations, but Kirchhoff preceded
Maxwell and instead generalized work by Georg Ohm.

Kirchhoff's current law (KCL)
The current entering any junction is equal to the current leaving that junction. i1 + i4 = i2 + i3
This law is also called Kirchhoff's point rule, Kirchhoff's junction rule (or nodal rule), and
Kirchhoff's first rule.
The principle of conservation of electric charge implies that:
At any node (junction) in an electrical circuit, the sum of currents flowing into that node
is equal to the sum of currents flowing out of that node.
or
The algebraic sum of currents in a network of conductors meeting at a point is zero.
(Assuming that current entering the junction is taken as positive and current leaving the
junction is taken as negative).
Recalling that current is a signed (positive or negative) quantity reflecting direction towards or
away from a node, this principle can be stated as:
n is the total number of branches with currents flowing towards or away from the node.
This formula is also valid for complex currents:
The law is based on the conservation of charge whereby the charge (measured in coulombs) is
the product of the current (in amperes) and the time (which is measured in seconds).
Changing charge density

Physically speaking, the restriction regarding the "capacitor plate" means that Kirchhoff's current
law is only valid if the charge density remains constant in the point that it is applied to. This is
normally not a problem because of the strength of electrostatic forces: the charge buildup would
cause repulsive forces to disperse the charges.
However, a charge build-up can occur in a capacitor, where the charge is typically spread over
wide parallel plates, with a physical break in the circuit that prevents the positive and negative
charge accumulations over the two plates from coming together and cancelling. In this case, the
sum of the currents flowing into one plate of the capacitor is not zero, but rather is equal to the
rate of charge accumulation. However, if the displacement current dD/dt is included, Kirchhoff's
current law once again holds. (This is really only required if one wants to apply the current law
to a point on a capacitor plate. In circuit analyses, however, the capacitor as a whole is typically
treated as a unit, in which case the ordinary current law holds since exactly the current that enters
the capacitor on the one side leaves it on the other side.)
More technically, Kirchhoff's current law can be found by taking the divergence of Ampère's law
with Maxwell's correction and combining with Gauss's law, yielding:
This is simply the charge conservation equation (in integral form, it says that the current flowing
out of a closed surface is equal to the rate of loss of charge within the enclosed volume
(Divergence theorem). Kirchhoff's current law is equivalent to the statement that the divergence
of the current is zero, true for time-invariant ρ, or always true if the displacement current is
included with J.
Uses
A matrix version of Kirchhoff's current law is the basis of most circuit simulation software, such
as SPICE.
Kirchhoff's voltage law (KVL)
The sum of all the voltages around the loop is equal to zero. v1 + v2 + v3 - v4 = 0

This law is also called Kirchhoff's second law, Kirchhoff's loop (or mesh) rule, and
Kirchhoff's second rule.
The principle of conservation of energy implies that
The directed sum of the electrical potential differences (voltage) around any closed
circuit is zero.
or
More simply, the sum of the emfs in any closed loop is equivalent to the sum of the
potential drops in that loop.
or
The algebraic sum of the products of the resistances of the conductors and the currents in
them in a closed loop is equal to the total emf available in that loop.
Similarly to KCL, it can be stated as:
Here, n is the total number of voltages measured. The voltages may also be complex:
This law is based on the conservation of "energy given/taken by potential field" (not including
energy taken by dissipation). Given a voltage potential, a charge which has completed a closed
loop doesn't gain or lose energy as it has gone back to initial potential level.
This law holds true even when resistance (which causes dissipation of energy) is present in a
circuit. The validity of this law in this case can be understood if one realizes that a charge in fact
doesn't go back to its starting point, due to dissipation of energy. A charge will just terminate at
the negative terminal, instead of positive terminal. This means all the energy given by the
potential difference has been fully consumed by resistance which in turn loses the energy as heat
dissipation.
To summarize, Kirchhoff's voltage law has nothing to do with gain or loss of energy by
electronic components (resistors, capacitors, etc). It is a law referring to the potential field
generated by voltage sources. In this potential field, regardless of what electronic components
are present, the gain or loss in "energy given by the potential field" must be zero when a charge
completes a closed loop.
Electric field and electric potential

Kirchhoff's voltage law could be viewed as a consequence of the principle of conservation of
energy. Otherwise, it would be possible to build a perpetual motion machine that passed a
current in a circle around the circuit.
Considering that electric potential is defined as a line integral over an electric field, Kirchhoff's
voltage law can be expressed equivalently as
which states that the line integral of the electric field around closed loop C is zero.
In order to return to the more special form, this integral can be "cut in pieces" in order to get the
voltage at specific components.
Limitations
This is a simplification of Faraday's law of induction for the special case where there is no
fluctuating magnetic field linking the closed loop. Therefore, it practically suffices for explaining
circuits containing only resistors and capacitors.
In the presence of a changing magnetic field the electric field is not conservative and it cannot
therefore define a pure scalar potential—the line integral of the electric field around the circuit is
not zero. This is because energy is being transferred from the magnetic field to the current (or
vice versa). In order to "fix" Kirchhoff's voltage law for circuits containing inductors, an
effective potential drop, or electromotive force (emf), is associated with each inductance of the
circuit, exactly equal to the amount by which the line integral of the electric field is not zero by
Faraday's law of induction.
References
Paul, Clayton R. (2001). Fundamentals of Electric Circuit Analysis. John Wiley & Sons.
ISBN 0-471-37195-5.
Serway, Raymond A.; Jewett, John W. (2004). Physics for Scientists and Engineers (6th
ed.). Brooks/Cole. ISBN 0-534-40842-7.
Tipler, Paul (2004). Physics for Scientists and Engineers: Electricity, Magnetism, Light,
and Elementary Modern Physics (5th ed.). W. H. Freeman. ISBN 0-7167-0810-8.
External links
http://www.sasked.gov.sk.ca/docs/physics/u3c13phy.html
MIT video lecture on the KVL and KCL methods

TRANSFORMER FUNDAMENTALS
A transformer is a device that transfers electrical energy from one circuit to another through
inductively coupled conductors—the transformer's coils. A varying current in the first or primary
winding creates a varying magnetic flux in the transformer's core and thus a varying magnetic
field through the secondary winding. This varying magnetic field induces a varying
electromotive force (EMF) or "voltage" in the secondary winding. This effect is called mutual
induction.
If a load is connected to the secondary, an electric current will flow in the secondary winding and
electrical energy will be transferred from the primary circuit through the transformer to the load.
In an ideal transformer, the induced voltage in the secondary winding (Vs) is in proportion to the
primary voltage (Vp), and is given by the ratio of the number of turns in the secondary (Ns) to the
number of turns in the primary (Np) as follows:
By appropriate selection of the ratio of turns, a transformer thus allows an alternating current
(AC) voltage to be "stepped up" by making Ns greater than Np, or "stepped down" by making Ns
less than Np.
Basic principles a simple single phase (1υ) Transformer consists of two electrical conductors
called the primary coil and the secondary coil. The primary is fed with a varying (alternating or
pulsed direct current) electric current which creates a varying magnetic field around the
conductor. According to the principle of mutual inductance, the secondary, which is placed in
this varying magnetic field, will develop a potential difference called an electromotive force or
EMF. If the ends of the secondary are connected together to form an electrical circuit, this EMF
will cause a current to flow in the secondary. Thus, some of the electrical power fed into the
primary is delivered to the secondary.
In practical Transformers, the primary and secondary conductors are coils of wire because a coil
creates a denser magnetic field (higher magnetic flux) than a straight conductor.
A Transformer winding should never be energised from a constant DC voltage source, as this
would cause a large direct current to flow. In such a situation, in an ideal Transformer, the
current would rise indefinitely as a linear function of time. In practice, the series resistance of the
winding limits the amount of current that can flow, until the Transformer either reaches thermal
equilibrium or is destroyed.
Transformers alone cannot do the following: Convert DC to AC or vice versa Change the voltage

or current of DC Change the frequency (the "cycles") of AC. However, transformers are
components of the systems that perform all these functions.
Electrical laws consider the following two laws: According to the law of conservation of energy,
the power delivered by a Transformer cannot exceed the power fed into it. The power dissipated
in a load at any instant is equal to the product of the voltage across it and the current passing
through it (see also Ohm's law). It follows from the above two laws that a Transformer is not a
power amplifier. If the Transformer is used to change transfer power from one voltage level to
another, the magnitudes of the currents in the two windings must also be different, in inverse
ratio to the voltages. Thus if current were to be brought down by the Transformer, voltage would
go up. If voltage were to be brought down by the Transformer, current would go up. For
example, suppose 50 watts is fed into a transformer with a ratio of 25:2.
P = I*E (Power = Current * Electromotiveforce) 50 W = 25 A * 2 V in the primary circuit
Now with Transformer change: 50 W = 2 A * 25 V in the secondary circuit.
The high-current low-voltage windings have fewer turns of wire. The high-voltage, low-current
windings have more turns of wire.
The electromotive force (EMF) developed in the secondary is proportional to the ratio of the
number of turns in the secondary coil to the number of turns in the primary coil. Neglecting all
leakage flux, an ideal transformer follows the equation: Vp/Vs = Np/Ns
Where Vp is the voltage in the primary coil, Vs is the voltage in the secondary coil, Np is the
number of turns of wire on the primary coil, and Ns is the number of turns of wire on the
secondary coil. This leads to the most common use of the transformer: to convert power at one
voltage to power at a different voltage.
Again, neglecting leakage flux, the relationship between voltage, number of turns, magnetic flux
intensity and core area is given by: E = 4.44 * F * n * a * b Where E is the sinusoidal root mean
square (RMS) voltage of the winding, F is the frequency in hertz, n is the number of turns of
wire, a is the area of the core (square units) and b is magnetic flux density in webers per square
unit. The value 4.44 collects a number of constants required by the system of units.
History
Discovery

Faraday's experiment with induction between coils of wire
[1]
The phenomenon of electromagnetic induction was discovered independently by Michael
Faraday and Joseph Henry in 1831. However, Faraday was the first to publish the results of his
experiments and thus receive credit for the discovery.[2]
The relationship between electromotive
force (EMF) or "voltage" and magnetic flux was formalized in an equation now referred to as
"Faraday's law of induction":
.
where is the magnitude of the EMF in volts and ΦB is the magnetic flux through the circuit (in
webers).[3]
Faraday performed the first experiments on induction between coils of wire, including winding a
pair of coils around an iron ring, thus creating the first toroidal closed-core transformer.[4]
Induction coils
The first type of transformer to see wide use was the induction coil, invented by Rev. Nicholas
Callan of Maynooth College, Ireland in 1836. He was one of the first researchers to realize that
the more turns the secondary winding has in relation to the primary winding, the larger is the
increase in EMF. Induction coils evolved from scientists' and inventors' efforts to get higher
voltages from batteries. Since batteries produce direct current (DC) rather than alternating
current (AC), induction coils relied upon vibrating electrical contacts that regularly interrupted
the current in the primary to create the flux changes necessary for induction. Between the 1830s
and the 1870s, efforts to build better induction coils, mostly by trial and error, slowly revealed
the basic principles of transformers.
In 1876, Russian engineer Pavel Yablochkov invented a lighting system based on a set of
induction coils where the primary windings were connected to a source of alternating current and
the secondary windings could be connected to several "electric candles" (arc lamps) of his own
design.[5][6]
The coils Yablochkov employed functioned essentially as transformers.[5]

In 1878, the Ganz Company in Hungary began manufacturing equipment for electric lighting
and, by 1883, had installed over fifty systems in Austria-Hungary. Their systems used alternating
current exclusively and included those comprising both arc and incandescent lamps, along with
generators and other equipment.[7]
Lucien Gaulard and John Dixon Gibbs first exhibited a device with an open iron core called a
"secondary generator" in London in 1882, then sold the idea to the Westinghouse company in the
United States.[8]
They also exhibited the invention in Turin, Italy in 1884, where it was adopted
for an electric lighting system.[9]
However, the efficiency of their open-core bipolar apparatus
remained very low.[10]
Induction coils with open magnetic circuits are inefficient for transfer of power to loads. Until
about 1880, the paradigm for AC power transmission from a high voltage supply to a low
voltage load was a series circuit. Open-core transformers with a ratio near 1:1 were connected
with their primaries in series to allow use of a high voltage for transmission while presenting a
low voltage to the lamps. The inherent flaw in this method was that turning off a single lamp
affected the voltage supplied to all others on the same circuit. Many adjustable transformer
designs were introduced to compensate for this problematic characteristic of the series circuit,
including those employing methods of adjusting the core or bypassing the magnetic flux around
part of a coil.[11]
Efficient, practical transformer designs did not appear until the 1880s, but within a decade the
transformer would be instrumental in the "War of Currents", and in seeing AC distribution
systems triumph over their DC counterparts, a position in which they have remained dominant
ever since.[12]
Closed-core lighting transformers
Drawing of Ganz Company's 1885 prototype. Capacity: 1400 VA, frequency: 40 Hz, voltage
ratio: 120/72 V

Prototypes of the world's first high-efficiency transformers. They were built by the Z.B.D. team
on 16th September 1884.[13]
In the autumn of 1884[14]
, Ganz Company engineers Károly Zipernowsky, Ottó Bláthy and
Miksa Déri had determined that open-core devices were impracticable, as they were incapable of
reliably regulating voltage. In their joint patent application for the "Z.B.D." transformers, they
described two designs with closed magnetic circuits: the "closed-core" and "shell-core"
transformers. In the closed-core, the primary and secondary windings were wound around a
closed iron ring; in the shell-core, the windings were passed through the iron core. In both
designs, the magnetic flux linking the primary and secondary windings traveled almost entirely
within the iron core, with no intentional path through air. The new Z.B.D. transformers reached
98 percent efficiency, which was 3.4 times higher than the open core bipolar devices of Gaulard
and Gibs.[15]
When employed in parallel connected electric distribution systems, closed-core
transformers finally made it technically and economically feasible to provide electric power for
lighting in homes, businesses and public spaces.[16][17]
Bláthy had suggested the use of closed-
cores, Zipernowsky the use of shunt connections, and Déri had performed the experiments;[18]
Bláthy also discovered the transformer formula, Vs/Vp = Ns/Np.[citation needed]
The vast majority of
transformers in use today rely on the basic principles discovered by the three engineers. They
also reportedly popularized the word "transformer" to describe a device for altering the EMF of
an electric current,[16][19]
although the term had already been in use by 1882.[20][21]
In 1886, the
Ganz Company installed the world's first power station that used AC generators to power a
parallel-connected common electrical network, the steam-powered Rome-Cerchi power plant.[22]
Stanley's 1886 design for adjustable gap open-core induction coils
[23]
Although George Westinghouse had bought Gaulard and Gibbs' patents in 1885, the Edison
Electric Light Company held an option on the U.S. rights for the Z.B.D. transformers, requiring
Westinghouse to pursue alternative designs on the same principles. He assigned to William
Stanley the task of developing a device for commercial use in United States.[24]
Stanley's first
patented design was for induction coils with single cores of soft iron and adjustable gaps to

regulate the EMF present in the secondary winding. (See drawing at left.)[23]
This design was
first used commercially in the U.S. in 1886.[12]
But Westinghouse soon had his team working on
a design whose core comprised a stack of thin "E-shaped" iron plates, separated individually or
in pairs by thin sheets of paper or other insulating material. Prewound copper coils could then be
slid into place, and straight iron plates laid in to create a closed magnetic circuit. Westinghouse
applied for a patent for the new design in December 1886; it was granted in July 1887.[18][25]
Other early transformers
In 1889, Russian-born engineer Mikhail Dolivo-Dobrovolsky developed the first three-phase
transformer at the Allgemeine Elektricitäts-Gesellschaft ("General Electricity Company") in
Germany.[26]
In 1891, Nikola Tesla invented the Tesla coil, an air-cored, dual-tuned resonant transformer for
generating very high voltages at high frequency.[27][28]
Audio frequency transformers ("repeating coils") were used by early experimenters in the
development of the telephone.[citation needed]
Basic principles
The transformer is based on two principles: first, that an electric current can produce a magnetic
field (electromagnetism), and, second that a changing magnetic field within a coil of wire
induces a voltage across the ends of the coil (electromagnetic induction). Changing the current in
the primary coil changes the magnetic flux that is developed. The changing magnetic flux
induces a voltage in the secondary coil.
An ideal transformer
An ideal transformer is shown in the adjacent figure. Current passing through the primary coil
creates a magnetic field. The primary and secondary coils are wrapped around a core of very

high magnetic permeability, such as iron, so that most of the magnetic flux passes through both
the primary and secondary coils.
Induction law
The voltage induced across the secondary coil may be calculated from Faraday's law of
induction, which states that:
where Vs is the instantaneous voltage, Ns is the number of turns in the secondary coil and Φ is the
magnetic flux through one turn of the coil. If the turns of the coil are oriented perpendicular to
the magnetic field lines, the flux is the product of the magnetic flux density B and the area A
through which it cuts. The area is constant, being equal to the cross-sectional area of the
transformer core, whereas the magnetic field varies with time according to the excitation of the
primary. Since the same magnetic flux passes through both the primary and secondary coils in an
ideal transformer,[29]
the instantaneous voltage across the primary winding equals
Taking the ratio of the two equations for Vs and Vp gives the basic equation[30]
for stepping up or
stepping down the voltage
Np/Ns is known as the turns ratio, and is the primary functional characteristic of any transformer.
In the case of step-up transformers, this may sometimes be stated as the reciprocal, Ns/Np. Turns
ratio is commonly expressed as an irreducible fraction or ratio: for example, a transformer with
primary and secondary windings of, respectively, 100 and 150 turns is said to have a turns ratio
of 2:3 rather than 0.667 or 100:150.
Ideal power equation

The ideal transformer as a circuit element
If the secondary coil is attached to a load that allows current to flow, electrical power is
transmitted from the primary circuit to the secondary circuit. Ideally, the transformer is perfectly
efficient; all the incoming energy is transformed from the primary circuit to the magnetic field
and into the secondary circuit. If this condition is met, the incoming electric power must equal
the outgoing power:
giving the ideal transformer equation
Transformers normally have high efficiency, so this formula is a reasonable approximation.
If the voltage is increased, then the current is decreased by the same factor. The impedance in
one circuit is transformed by the square of the turns ratio.[29]
For example, if an impedance Zs is
attached across the terminals of the secondary coil, it appears to the primary circuit to have an
impedance of (Np/Ns)2Zs. This relationship is reciprocal, so that the impedance Zp of the primary
circuit appears to the secondary to be (Ns/Np)2Zp.
Detailed operation
The simplified description above neglects several practical factors, in particular the primary
current required to establish a magnetic field in the core, and the contribution to the field due to
current in the secondary circuit.
Models of an ideal transformer typically assume a core of negligible reluctance with two
windings of zero resistance.[31]
When a voltage is applied to the primary winding, a small current
flows, driving flux around the magnetic circuit of the core.[31]
The current required to create the
flux is termed the magnetizing current; since the ideal core has been assumed to have near-zero

reluctance, the magnetizing current is negligible, although still required to create the magnetic
field.
The changing magnetic field induces an electromotive force (EMF) across each winding.[32]
Since the ideal windings have no impedance, they have no associated voltage drop, and so the
voltages VP and VS measured at the terminals of the transformer, are equal to the corresponding
EMFs. The primary EMF, acting as it does in opposition to the primary voltage, is sometimes
termed the "back EMF".[33]
This is due to Lenz's law which states that the induction of EMF
would always be such that it will oppose development of any such change in magnetic field.
Practical considerations
Leakage flux
Leakage flux of a transformer
The ideal transformer model assumes that all flux generated by the primary winding links all the
turns of every winding, including itself. In practice, some flux traverses paths that take it outside
the windings.[34]
Such flux is termed leakage flux, and results in leakage inductance in series with
the mutually coupled transformer windings.[33]
Leakage results in energy being alternately stored
in and discharged from the magnetic fields with each cycle of the power supply. It is not directly
a power loss (see "Stray losses" below), but results in inferior voltage regulation, causing the
secondary voltage to fail to be directly proportional to the primary, particularly under heavy
load.[34]
Transformers are therefore normally designed to have very low leakage inductance.
However, in some applications, leakage can be a desirable property, and long magnetic paths, air
gaps, or magnetic bypass shunts may be deliberately introduced to a transformer's design to limit
the short-circuit current it will supply.[33]
Leaky transformers may be used to supply loads that
exhibit negative resistance, such as electric arcs, mercury vapor lamps, and neon signs; or for
safely handling loads that become periodically short-circuited such as electric arc welders.[35]
Air gaps are also used to keep a transformer from saturating, especially audio-frequency
transformers in circuits that have a direct current flowing through the windings.

Leakage inductance is also helpful when transformers are operated in parallel. It can be shown
that if the "per-unit" inductance of two transformers is the same (a typical value is 5% for low
power transformers), they will automatically split power "correctly" (e.g. 500 kVA unit in
parallel with 1,000 kVA unit, the larger one will carry twice the current).
Effect of frequency
Transformer universal EMF equation
If the flux in the core is purely sinusoidal, the relationship for either winding between its rms
voltage Erms of the winding , and the supply frequency f, number of turns N, core cross-sectional
area a and peak magnetic flux density B is given by the universal EMF equation:[31]
If the flux does not contain even harmonics the following equation can be used for half-cycle
average voltage Eavg of any waveshape:
The time-derivative term in Faraday's Law shows that the flux in the core is the integral with
respect to time of the applied voltage.[36]
Hypothetically an ideal transformer would work with
direct-current excitation, with the core flux increasing linearly with time.[37]
In practice, the flux
would rise to the point where magnetic saturation of the core occurs, causing a huge increase in
the magnetizing current and overheating the transformer. All practical transformers must
therefore operate with alternating (or pulsed) current.[37]
The EMF of a transformer at a given flux density increases with frequency.[31]
By operating at
higher frequencies, transformers can be physically more compact because a given core is able to
transfer more power without reaching saturation and fewer turns are needed to achieve the same
impedance. However, properties such as core loss and conductor skin effect also increase with
frequency. Aircraft and military equipment employ 400 Hz power supplies which reduce core
and winding weight.[38]
Conversely, frequencies used for some railway electrification systems
were much lower (e.g. 16.7 Hz and 25 Hz) than normal utility frequencies (50 – 60 Hz) for
historical reasons concerned mainly with the limitations of early electric traction motors. As
such, the transformers used to step down the high over-head line voltages (e.g. 15 kV) are much
heavier for the same power rating than those designed only for the higher frequencies.
Operation of a transformer at its designed voltage but at a higher frequency than intended will
lead to reduced magnetizing current; at lower frequency, the magnetizing current will increase.
Operation of a transformer at other than its design frequency may require assessment of voltages,
losses, and cooling to establish if safe operation is practical. For example, transformers may need
to be equipped with "volts per hertz" over-excitation relays to protect the transformer from
overvoltage at higher than rated frequency.

One example of state-of-the-art design is those transformers used for electric multiple unit high
speed trains, particularly those required to operate across the borders of countries using different
standards of electrification. The position of such transformers is restricted to being hung below
the passenger compartment. They have to function at different frequencies (down to 16.7 Hz)
and voltages (up to 25 kV) whilst handling the enhanced power requirements needed for
operating the trains at high speed.
Knowledge of natural frequencies of transformer windings is of importance for the determination
of the transient response of the windings to impulse and switching surge voltages.
Energy losses
An ideal transformer would have no energy losses, and would be 100% efficient. In practical
transformers energy is dissipated in the windings, core, and surrounding structures. Larger
transformers are generally more efficient, and those rated for electricity distribution usually
perform better than 98%.[39]
Experimental transformers using superconducting windings achieve efficiencies of 99.85%.[40]
The increase in efficiency from about 98 to 99.85% can save considerable energy, and hence
money, in a large heavily-loaded transformer; the trade-off is in the additional initial and running
cost of the superconducting design.
Losses in transformers (excluding associated circuitry) vary with load current, and may be
expressed as "no-load" or "full-load" loss. Winding resistance dominates load losses, whereas
hysteresis and eddy currents losses contribute to over 99% of the no-load loss. The no-load loss
can be significant, so that even an idle transformer constitutes a drain on the electrical supply and
a running cost; designing transformers for lower loss requires a larger core, good-quality silicon
steel, or even amorphous steel, for the core, and thicker wire, increasing initial cost, so that there
is a trade-off between initial cost and running cost. (Also see energy efficient transformer).[41]
Transformer losses are divided into losses in the windings, termed copper loss, and those in the
magnetic circuit, termed iron loss. Losses in the transformer arise from:
Winding resistance Current flowing through the windings causes resistive heating of the conductors. At
higher frequencies, skin effect and proximity effect create additional winding resistance
and losses.
Hysteresis losses Each time the magnetic field is reversed, a small amount of energy is lost due to
hysteresis within the core. For a given core material, the loss is proportional to the
frequency, and is a function of the peak flux density to which it is subjected.[41]
Eddy currents Ferromagnetic materials are also good conductors, and a core made from such a material
also constitutes a single short-circuited turn throughout its entire length. Eddy currents
therefore circulate within the core in a plane normal to the flux, and are responsible for
resistive heating of the core material. The eddy current loss is a complex function of the

square of supply frequency and inverse square of the material thickness.[41]
Eddy current
losses can be reduced by making the core of a stack of plates electrically insulated from
each other, rather than a solid block; all transformers operating at low frequencies use
laminated or similar cores.
Magnetostriction Magnetic flux in a ferromagnetic material, such as the core, causes it to physically
expand and contract slightly with each cycle of the magnetic field, an effect known as
magnetostriction. This produces the buzzing sound commonly associated with
transformers,[30]
and can cause losses due to frictional heating.
Mechanical losses In addition to magnetostriction, the alternating magnetic field causes fluctuating forces
between the primary and secondary windings. These incite vibrations within nearby
metalwork, adding to the buzzing noise, and consuming a small amount of power.[42]
Stray losses Leakage inductance is by itself largely lossless, since energy supplied to its magnetic
fields is returned to the supply with the next half-cycle. However, any leakage flux that
intercepts nearby conductive materials such as the transformer's support structure will
give rise to eddy currents and be converted to heat.[43]
There are also radiative losses due
to the oscillating magnetic field, but these are usually small.
Dot convention
It is common in transformer schematic symbols for there to be a dot at the end of each coil
within a transformer, particularly for transformers with multiple primary and secondary
windings. The dots indicate the direction of each winding relative to the others. Voltages at the
dot end of each winding are in phase; current flowing into the dot end of a primary coil will
result in current flowing out of the dot end of a secondary coil.
Equivalent circuit
Refer to the diagram below
The physical limitations of the practical transformer may be brought together as an equivalent
circuit model (shown below) built around an ideal lossless transformer.[44]
Power loss in the
windings is current-dependent and is represented as in-series resistances Rp and Rs. Flux leakage
results in a fraction of the applied voltage dropped without contributing to the mutual coupling,
and thus can be modeled as reactances of each leakage inductance Xp and Xs in series with the
perfectly coupled region.
Iron losses are caused mostly by hysteresis and eddy current effects in the core, and are
proportional to the square of the core flux for operation at a given frequency.[45]
Since the core
flux is proportional to the applied voltage, the iron loss can be represented by a resistance RC in
parallel with the ideal transformer.
A core with finite permeability requires a magnetizing current Im to maintain the mutual flux in
the core. The magnetizing current is in phase with the flux; saturation effects cause the

relationship between the two to be non-linear, but for simplicity this effect tends to be ignored in
most circuit equivalents.[45]
With a sinusoidal supply, the core flux lags the induced EMF by 90°
and this effect can be modeled as a magnetizing reactance (reactance of an effective inductance)
Xm in parallel with the core loss component. Rc and Xm are sometimes together termed the
magnetizing branch of the model. If the secondary winding is made open-circuit, the current I0
taken by the magnetizing branch represents the transformer's no-load current.[44]
The secondary impedance Rs and Xs is frequently moved (or "referred") to the primary side after
multiplying the components by the impedance scaling factor (Np/Ns)2.
Transformer equivalent circuit, with secondary impedances referred to the primary side
The resulting model is sometimes termed the "exact equivalent circuit", though it retains a
number of approximations, such as an assumption of linearity.[44]
Analysis may be simplified by
moving the magnetizing branch to the left of the primary impedance, an implicit assumption that
the magnetizing current is low, and then summing primary and referred secondary impedances,
resulting in so-called equivalent impedance.
The parameters of equivalent circuit of a transformer can be calculated from the results of two
transformer tests: open-circuit test and short-circuit test.
Types
A wide variety of transformer designs are used for different applications, though they share
several common features. Important common transformer types include:
Autotransformer

An autotransformer with a sliding brush contact
An autotransformer has a single winding with two end terminals, and one or more terminals at
intermediate tap points. The primary voltage is applied across two of the terminals, and the
secondary voltage taken from two terminals, almost always having one terminal in common with
the primary voltage. The primary and secondary circuits therefore have a number of windings
turns in common.[46]
Since the volts-per-turn is the same in both windings, each develops a
voltage in proportion to its number of turns. In an autotransformer part of the current flows
directly from the input to the output, and only part is transferred inductively, allowing a smaller,
lighter, cheaper core to be used as well as requiring only a single winding[47]
. However, a
transformer with separate windings isolates the primary from the secondary, which is safer when
using mains voltages.
An adjustable autotransformer is made by exposing part of the winding coils and making the
secondary connection through a sliding brush, giving a variable turns ratio.[48]
Such a device is
often referred to as a variac.
Autotransformers are often used to step up or down between voltages in the 110-117-120 volt
range and voltages in the 220-230-240 volt range, e.g., to output either 110 or 120V (with taps)
from 230V input, allowing equipment from a 100 or 120V region to be used in a 230V region.
Polyphase transformers

Three-phase step-down transformer mounted between two utility poles
For three-phase supplies, a bank of three individual single-phase transformers can be used, or all
three phases can be incorporated as a single three-phase transformer. In this case, the magnetic
circuits are connected together, the core thus containing a three-phase flow of flux.[49]
A number
of winding configurations are possible, giving rise to different attributes and phase shifts.[50]
One
particular polyphase configuration is the zigzag transformer, used for grounding and in the
suppression of harmonic currents.[51]
Leakage transformers
Leakage transformer
A leakage transformer, also called a stray-field transformer, has a significantly higher leakage
inductance than other transformers, sometimes increased by a magnetic bypass or shunt in its
core between primary and secondary, which is sometimes adjustable with a set screw. This
provides a transformer with an inherent current limitation due to the loose coupling between its

primary and the secondary windings. The output and input currents are low enough to prevent
thermal overload under all load conditions—even if the secondary is shorted.
Leakage transformers are used for arc welding and high voltage discharge lamps (neon lights and
cold cathode fluorescent lamps, which are series-connected up to 7.5 kV AC). It acts then both as
a voltage transformer and as a magnetic ballast.
Other applications are short-circuit-proof extra-low voltage transformers for toys or doorbell
installations.
Resonant transformers
A resonant transformer is a kind of leakage transformer. It uses the leakage inductance of its
secondary windings in combination with external capacitors, to create one or more resonant
circuits. Resonant transformers such as the Tesla coil can generate very high voltages, and are
able to provide much higher current than electrostatic high-voltage generation machines such as
the Van de Graaff generator.[52]
One of the applications of the resonant transformer is for the
CCFL inverter. Another application of the resonant transformer is to couple between stages of a
superheterodyne receiver, where the selectivity of the receiver is provided by tuned transformers
in the intermediate-frequency amplifiers.[53]
Audio transformers
Audio transformers are those specifically designed for use in audio circuits. They can be used to
block radio frequency interference or the DC component of an audio signal, to split or combine
audio signals, or to provide impedance matching between high and low impedance circuits, such
as between a high impedance tube (valve) amplifier output and a low impedance loudspeaker, or
between a high impedance instrument output and the low impedance input of a mixing console.
Such transformers were originally designed to connect different telephone systems to one
another while keeping their respective power supplies isolated, and are still commonly used to
interconnect professional audio systems or system components.
Being magnetic devices, audio transformers are susceptible to external magnetic fields such as
those generated by AC current-carrying conductors. "Hum" is a term commonly used to describe
unwanted signals originating from the "mains" power supply (typically 50 or 60 Hz). Audio
transformers used for low-level signals, such as those from microphones, often include shielding
to protect against extraneous magnetically coupled signals.
Instrument transformers
Instrument transformers are used for measuring voltage and current in electrical power systems,
and for power system protection and control. Where a voltage or current is too large to be
conveniently used by an instrument, it can be scaled down to a standardized, low value.
Instrument transformers isolate measurement, protection and control circuitry from the high
currents or voltages present on the circuits being measured or controlled.

Current transformers, designed for placing around conductors
A current transformer is a transformer designed to provide a current in its secondary coil
proportional to the current flowing in its primary coil.[54]
Voltage transformers (VTs), also referred to as "potential transformers" (PTs), are designed to
have an accurately known transformation ratio in both magnitude and phase, over a range of
measuring circuit impedances. A voltage transformer is intended to present a negligible load to
the supply being measured. The low secondary voltage allows protective relay equipment and
measuring instruments to be operated at a lower voltages.[55]
Both current and voltage instrument transformers are designed to have predictable characteristics
on overloads. Proper operation of over-current protective relays requires that current
transformers provide a predictable transformation ratio even during a short-circuit.
Classification
Transformers can be classified in many different ways; an incomplete list is:
By power capacity: from a fraction of a volt-ampere (VA) to over a thousand MVA;
By frequency range: power-, audio-, or radio frequency;
By voltage class: from a few volts to hundreds of kilovolts;
By cooling type: air-cooled, oil-filled, fan-cooled, or water-cooled;
By application: such as power supply, impedance matching, output voltage and current
stabilizer, or circuit isolation;
By purpose: distribution, rectifier, arc furnace, amplifier output, etc.;
By winding turns ratio: step-up, step-down, isolating with equal or near-equal ratio,
variable, multiple windings.
Construction
Cores

Laminated core transformer showing edge of laminations at top of photo
Laminated steel cores
Transformers for use at power or audio frequencies typically have cores made of high
permeability silicon steel.[56]
The steel has a permeability many times that of free space, and the
core thus serves to greatly reduce the magnetizing current, and confine the flux to a path which
closely couples the windings.[57]
Early transformer developers soon realized that cores
constructed from solid iron resulted in prohibitive eddy-current losses, and their designs
mitigated this effect with cores consisting of bundles of insulated iron wires.[8]
Later designs
constructed the core by stacking layers of thin steel laminations, a principle that has remained in
use. Each lamination is insulated from its neighbors by a thin non-conducting layer of
insulation.[49]
The universal transformer equation indicates a minimum cross-sectional area for
the core to avoid saturation.
The effect of laminations is to confine eddy currents to highly elliptical paths that enclose little
flux, and so reduce their magnitude. Thinner laminations reduce losses,[56]
but are more laborious
and expensive to construct.[58]
Thin laminations are generally used on high frequency
transformers, with some types of very thin steel laminations able to operate up to 10 kHz.
One common design of laminated core is made from interleaved stacks of E-shaped steel sheets
capped with I-shaped pieces, leading to its name of "E-I transformer".[58]
Such a design tends to
exhibit more losses, but is very economical to manufacture. The cut-core or C-core type is made
by winding a steel strip around a rectangular form and then bonding the layers together. It is then
cut in two, forming two C shapes, and the core assembled by binding the two C halves together
with a steel strap.[58]
They have the advantage that the flux is always oriented parallel to the
metal grains, reducing reluctance.
A steel core's remanence means that it retains a static magnetic field when power is removed.
When power is then reapplied, the residual field will cause a high inrush current until the effect
of the remaining magnetism is reduced, usually after a few cycles of the applied alternating
current.[59]
Overcurrent protection devices such as fuses must be selected to allow this harmless
inrush to pass. On transformers connected to long, overhead power transmission lines, induced
currents due to geomagnetic disturbances during solar storms can cause saturation of the core
and operation of transformer protection devices.[60]

Distribution transformers can achieve low no-load losses by using cores made with low-loss
high-permeability silicon steel or amorphous (non-crystalline) metal alloy. The higher initial cost
of the core material is offset over the life of the transformer by its lower losses at light load.[61]
Solid cores
Powdered iron cores are used in circuits (such as switch-mode power supplies) that operate
above main frequencies and up to a few tens of kilohertz. These materials combine high
magnetic permeability with high bulk electrical resistivity. For frequencies extending beyond the
VHF band, cores made from non-conductive magnetic ceramic materials called ferrites are
common.[58]
Some radio-frequency transformers also have movable cores (sometimes called
'slugs') which allow adjustment of the coupling coefficient (and bandwidth) of tuned radio-
frequency circuits.
Toroidal cores
Small toroidal core transformer
Toroidal transformers are built around a ring-shaped core, which, depending on operating
frequency, is made from a long strip of silicon steel or permalloy wound into a coil, powdered
iron, or ferrite.[62]
A strip construction ensures that the grain boundaries are optimally aligned,
improving the transformer's efficiency by reducing the core's reluctance. The closed ring shape
eliminates air gaps inherent in the construction of an E-I core.[35]
The cross-section of the ring is
usually square or rectangular, but more expensive cores with circular cross-sections are also
available. The primary and secondary coils are often wound concentrically to cover the entire
surface of the core. This minimizes the length of wire needed, and also provides screening to
minimize the core's magnetic field from generating electromagnetic interference.
Toroidal transformers are more efficient than the cheaper laminated E-I types for a similar power
level. Other advantages compared to E-I types, include smaller size (about half), lower weight
(about half), less mechanical hum (making them superior in audio amplifiers), lower exterior
magnetic field (about one tenth), low off-load losses (making them more efficient in standby
circuits), single-bolt mounting, and greater choice of shapes. The main disadvantages are higher
cost and limited power capacity (see "Classification" above). Because of the lack of a residual
gap in the magnetic path, toroidal transformers also tend to exhibit higher inrush current,
compared to laminated E-I types.

Ferrite toroidal cores are used at higher frequencies, typically between a few tens of kilohertz to
hundreds of megahertz, to reduce losses, physical size, and weight of switch-mode power
supplies. A drawback of toroidal transformer construction is the higher labor cost of winding.
This is because it is necessary to pass the entire length of a coil winding through the core
aperture each time a single turn is added to the coil. As a consequence, toroidal transformers are
uncommon above ratings of a few kVA. Small distribution transformers may achieve some of
the benefits of a toroidal core by splitting it and forcing it open, then inserting a bobbin
containing primary and secondary windings.
Air cores
A physical core is not an absolute requisite and a functioning transformer can be produced
simply by placing the windings near each other, an arrangement termed an "air-core"
transformer. The air which comprises the magnetic circuit is essentially lossless, and so an air-
core transformer eliminates loss due to hysteresis in the core material.[33]
The leakage inductance
is inevitably high, resulting in very poor regulation, and so such designs are unsuitable for use in
power distribution.[33]
They have however very high bandwidth, and are frequently employed in
radio-frequency applications,[63]
for which a satisfactory coupling coefficient is maintained by
carefully overlapping the primary and secondary windings. They're also used for resonant
transformers such as Tesla coils where they can achieve reasonably low loss in spite of the high
leakage inductance.
Windings
Windings are usually arranged concentrically to minimize flux leakage.

Cut view through transformer windings. White: insulator. Green spiral: Grain oriented silicon
steel. Black: Primary winding made of oxygen-free copper. Red: Secondary winding. Top left:
Toroidal transformer. Right: C-core, but E-core would be similar. The black windings are made
of film. Top: Equally low capacitance between all ends of both windings. Since most cores are at
least moderately conductive they also need insulation. Bottom: Lowest capacitance for one end
of the secondary winding needed for low-power high-voltage transformers. Bottom left:
Reduction of leakage inductance would lead to increase of capacitance.
The conducting material used for the windings depends upon the application, but in all cases the
individual turns must be electrically insulated from each other to ensure that the current travels
throughout every turn.[36]
For small power and signal transformers, in which currents are low and
the potential difference between adjacent turns is small, the coils are often wound from
enamelled magnet wire, such as Formvar wire. Larger power transformers operating at high
voltages may be wound with copper rectangular strip conductors insulated by oil-impregnated
paper and blocks of pressboard.[64]
High-frequency transformers operating in the tens to hundreds of kilohertz often have windings
made of braided Litz wire to minimize the skin-effect and proximity effect losses.[36]
Large
power transformers use multiple-stranded conductors as well, since even at low power
frequencies non-uniform distribution of current would otherwise exist in high-current
windings.[64]
Each strand is individually insulated, and the strands are arranged so that at certain
points in the winding, or throughout the whole winding, each portion occupies different relative
positions in the complete conductor. The transposition equalizes the current flowing in each
strand of the conductor, and reduces eddy current losses in the winding itself. The stranded
conductor is also more flexible than a solid conductor of similar size, aiding manufacture.[64]
For signal transformers, the windings may be arranged in a way to minimize leakage inductance
and stray capacitance to improve high-frequency response. This can be done by splitting up each
coil into sections, and those sections placed in layers between the sections of the other winding.
This is known as a stacked type or interleaved winding.
Both the primary and secondary windings on power transformers may have external connections,
called taps, to intermediate points on the winding to allow selection of the voltage ratio. In power
distribution transformers the taps may be connected to an automatic on-load tap changer for

voltage regulation of distribution circuits. Audio-frequency transformers, used for the
distribution of audio to public address loudspeakers, have taps to allow adjustment of impedance
to each speaker. A center-tapped transformer is often used in the output stage of an audio power
amplifier in a push-pull circuit. Modulation transformers in AM transmitters are very similar.
Certain transformers have the windings protected by epoxy resin. By impregnating the
transformer with epoxy under a vacuum, one can replace air spaces within the windings with
epoxy, thus sealing the windings and helping to prevent the possible formation of corona and
absorption of dirt or water. This produces transformers more suited to damp or dirty
environments, but at increased manufacturing cost.[65]
Coolant
Cut-away view of three-phase oil-cooled transformer. The oil reservoir is visible at the top.
Radiative fins aid the dissipation of heat.
High temperatures will damage the winding insulation.[66]
Small transformers do not generate
significant heat and are cooled by air circulation and radiation of heat. Power transformers rated
up to several hundred kVA can be adequately cooled by natural convective air-cooling,
sometimes assisted by fans.[67]
In larger transformers, part of the design problem is removal of
heat. Some power transformers are immersed in transformer oil that both cools and insulates the
windings.[68]
The oil is a highly refined mineral oil that remains stable at transformer operating
temperature. Indoor liquid-filled transformers are required by building regulations in many
jurisdictions to use a non-flammable liquid, or to be located in fire-resistant rooms.[69]
Air-cooled
dry transformers are preferred for indoor applications even at capacity ratings where oil-cooled
construction would be more economical, because their cost is offset by the reduced building
construction cost.
The oil-filled tank often has radiators through which the oil circulates by natural convection;
some large transformers employ forced circulation of the oil by electric pumps, aided by external

fans or water-cooled heat exchangers.[68]
Oil-filled transformers undergo prolonged drying
processes to ensure that the transformer is completely free of water vapor before the cooling oil
is introduced. This helps prevent electrical breakdown under load. Oil-filled transformers may be
equipped with Buchholz relays, which detect gas evolved during internal arcing and rapidly de-
energize the transformer to avert catastrophic failure.[59]
Oil-filled transformers may fail, rupture,
and burn, causing power outages and losses. Installations of oil-filled transformers usually
includes fire protection measures such as walls, oil containment, and fire-suppression sprinkler
systems.
Polychlorinated biphenyls have properties that once favored their use as a coolant, though
concerns over their environmental persistence led to a widespread ban on their use.[70]
Today,
non-toxic, stable silicone-based oils, or fluorinated hydrocarbons may be used where the expense
of a fire-resistant liquid offsets additional building cost for a transformer vault.[66][69]
Before
1977, even transformers that were nominally filled only with mineral oils may also have been
contaminated with polychlorinated biphenyls at 10-20 ppm. Since mineral oil and PCB fluid
mix, maintenance equipment used for both PCB and oil-filled transformers could carry over
small amounts of PCB, contaminating oil-filled transformers.[71]
Some "dry" transformers (containing no liquid) are enclosed in sealed, pressurized tanks and
cooled by nitrogen or sulfur hexafluoride gas.[66]
Experimental power transformers in the 2 MVA range have been built with superconducting
windings which eliminates the copper losses, but not the core steel loss. These are cooled by
liquid nitrogen or helium.[72]
Insulation drying
Construction of oil-filled transformers requires that the insulation covering the windings be
thoroughly dried before the oil is introduced. There are several different methods of drying.
Common for all is that they are carried out in vacuum environment. The vacuum makes it
difficult to transfer energy (heat) to the insulation. For this there are several different methods.
The traditional drying is done by circulating hot air over the active part and cycle this with
periods of vacuum (Hot Air Vacuum drying, HAV). More common for larger transformers is to
use evaporated solvent which condenses on the colder active part. The benefit is that the entire
process can be carried out at lower pressure and without influence of added oxygen. This process
is commonly called Vapour Phase Drying (VPD).
For distribution transformers which are smaller and have a smaller insulation weight, resistance
heating can be used. This is a method where current is injected in the windings and the resistance
in the windings is heating up the insulation. The benefit is that the heating can be controlled very
well and it is energy efficient. The method is called Low Frequency Heating (LFH) since the
current is injected at a much lower frequency than the nominal of the grid, which is normally 50
or 60 Hz. A lower frequency reduces the affect of the inductance in the transformer and the
voltage can be reduced.
Terminals

Very small transformers will have wire leads connected directly to the ends of the coils, and
brought out to the base of the unit for circuit connections. Larger transformers may have heavy
bolted terminals, bus bars or high-voltage insulated bushings made of polymers or porcelain. A
large bushing can be a complex structure since it must provide careful control of the electric field
gradient without letting the transformer leak oil.[73]
Applications
Image of an electrical substation in Melbourne, Australia showing 3 of 5 220kV/66kV
transformers, each with a capacity of 185MVA
A major application of transformers is to increase voltage before transmitting electrical energy
over long distances through wires. Wires have resistance and so dissipate electrical energy at a
rate proportional to the square of the current through the wire. By transforming electrical power
to a high-voltage (and therefore low-current) form for transmission and back again afterward,
transformers enable economic transmission of power over long distances. Consequently,
transformers have shaped the electricity supply industry, permitting generation to be located
remotely from points of demand.[74]
All but a tiny fraction of the world's electrical power has
passed through a series of transformers by the time it reaches the consumer.[43]
Transformers are also used extensively in electronic products to step down the supply voltage to
a level suitable for the low voltage circuits they contain. The transformer also electrically isolates
the end user from contact with the supply voltage.
Signal and audio transformers are used to couple stages of amplifiers and to match devices such
as microphones and record players to the input of amplifiers. Audio transformers allowed
telephone circuits to carry on a two-way conversation over a single pair of wires. A balun
transformer converts a signal that is referenced to ground to a signal that has balanced voltages to
ground, such as between external cables and internal circuits.
The principle of open-circuit (unloaded) transformer is widely used for characterisation of soft
magnetic materials, for example in the internationally standardised Epstein frame method[75]
.

Notes
1. ^ Poyser, Arthur William (1892), Magnetism and electricity: A manual for students in advanced
classes. London and New York; Longmans, Green, & Co., p. 285, fig. 248. Retrieved 2009-08-
06.
2. ^ "Joseph Henry". Distinguished Members Gallery, National Academy of Sciences.
http://www.nas.edu/history/members/henry.html. Retrieved November 30, 2006.
3. ^ Chow, Tai L. (2006), Introduction to electromagnetic theory: a modern perspective. Sudbury,
Massachusetts (USA), Jones and Bartlett Publishers, p. 171. ISBN 0763738271.
4. ^ Faraday, Michael (1834). "Experimental Researches on Electricity, 7th Series". Philosophical
Transactions of the Royal Society of London 124: 77–122. doi:10.1098/rstl.1834.0008.
5. ^ a b Stanley Transformer. Los Alamos National Laboratory; University of Florida.
http://www.magnet.fsu.edu/education/tutorials/museum/stanleytransformer.html. Retrieved
January 9, 2009.
6. ^ W. De Fonveille (1880-1-22). "Gas and Electricity in Paris". Nature 21 (534): 283.
http://books.google.com/?id=ksa-S7C8dT8C&pg=RA2-PA283. Retrieved January 9, 2009.
7. ^ Hughes, Thomas P. (1993). Networks of Power: Electrification in Western Society, 1880-1930.
Baltimore: The Johns Hopkins University Press. p. 96. ISBN 0-8018-2873-2.
http://books.google.com/?id=g07Q9M4agp4C&pg=PA96&dq=Networks+of+Power:+Electrificat
ion+in+Western+Society,+1880-1930+ganz#v=onepage&q=. Retrieved September 9, 2009.
8. ^ a b Allan, D.J.. "Power transformers – the second century". Power Engineering Journal.
9. ^ Uppenborn, F. J., History of the Transformer, E. & F. N. Spon, London, 1889. p. 41.
10. ^ Friedrich Uppenborn: History of the Transformer, page 35.
11. ^ Uppenborn, F. J., History of the Transformer, E. & F. N. Spon, London, 1889.
12. ^ a b Coltman, J. W. (January 1988). "The Transformer". Scientific American: pp. 86–95. OSTI
6851152.
13. ^ http://dspace.thapar.edu:8080/dspace/bitstream/123456789/91/1/P92087.pdf
14. ^ www.aaidu.org/phdsubmit/phdpdf/06PHEE201.pdf
15. ^ [1]|SÁNDOR JESZENSZKY: Electrostatics and Electrodynamics at Pest University in the mid-
19th Century, ( page: 178) University of Pavia
16. ^ a b Bláthy, Ottó Titusz (1860 - 1939), Hungarian Patent Office, January 29, 2004.
17. ^ Zipernowsky, K., M. Déri and O. T. Bláthy, Induction Coil, Patent No. 352,105, U.S. Patent
Office, November 2, 1886, retrieved July 8, 2009.
18. ^ a b Smil, Vaclav, Creating the Twentieth Century: Technical Innovations of 1867—1914 and
Their Lasting Impact, Oxford University Press, 2005, p. 71.
19. ^ Nagy, Árpád Zoltán, "Lecture to Mark the 100th Anniversary of the Discovery of the Electron
in 1897" (preliminary text), Budapest October 11, 1996, retrieved July 9, 2009.
20. ^ Oxford English Dictionary (2nd ed.). Oxford University Press. 1989.
21. ^ Hospitalier, Édouard, 1882, The Modern Applications of Electricity, Translated and Enlarged
by Julius Maier. New York, D. Appleton & Co., p. 103.
22. ^ "Ottó Bláthy, Miksa Déri, Károly Zipernowsky", IEC Techline. Retrieved 2010-04-16.
23. ^ a b Stanley, William, Jr., Induction Coil. Patent No. 0349611, United States Patent Office,
September 21, 1886. Retrieved July 13, 2009.
24. ^ Skrabec, Quentin R. (2007). George Westinghouse: Gentle Genius. Algora Publishing. p. 102.
ISBN 978-0875865089. http://books.google.com/?id=C3GYdiFM41oC&pg=PA102.
25. ^ Westinghouse, G. Jr., Electrical Converter, Patent No. 366362, United States Patent Office,
1887.
26. ^ Neidhöfer, Gerhard: Michael von Dolivo-Dobrowolsky und der Drehstrom. Geschichte der
Elektrotechnik, Volume 9, VDE VERLAG, Berlin Offenbach, ISBN 978-3-8007-3115-2.
(German)

27. ^ Uth, Robert (December 12, 2000). "Tesla coil". Tesla: Master of Lightning. PBS.org.
http://www.pbs.org/tesla/ins/lab_tescoil.html. Retrieved May 20, 2008.
28. ^ Tesla, Nikola (1891). "System of elecrical lighting". United States Patent and Trademark
Office. http://patft.uspto.gov/netacgi/nph-
Parser?Sect1=PTO1&Sect2=HITOFF&d=PALL&p=1&u=%2Fnetahtml%2FPTO%2Fsrchnum.ht
m&r=1&f=G&l=50&s1=0454622.PN.&OS=PN/0454622&RS=PN/0454622.
29. ^ a b Flanagan, William M. (January 1, 1993). Handbook of Transformer Design and
Applications. McGraw-Hill Professional. Chap. 1, p. 1–2. ISBN 0070212910.
30. ^ a b Winders. Power Transformer Principles and Applications. pp. 20–21.
31. ^ a b c d Say, M. G. (February, 1984). Alternating Current Machines, Fifth Edition. Halsted Press.
ISBN 0470274514.
32. ^ Heathcote, Martin (November 3, 1998). J & P Transformer Book, Twelfth edition. Newnes.
pp. 2–3. ISBN 0750611588.
33. ^ a b c d e Calvert, James (2001). "Inside Transformers". University of Denver.
http://www.du.edu/~jcalvert/tech/transfor.htm. Retrieved May 19, 2007.
34. ^ a b McLaren, P. G. (January 1, 1984). Elementary Electric Power and Machines. pp. 68–74.
ISBN 0132576015.
35. ^ a b Say, M. G. (February, 1984). Alternating Current Machines, Fifth Edition. Halsted Press.
p. 485. ISBN 0470274514.
36. ^ a b c Dixon, Lloyd. "Magnetics Design Handbook". Texas Instruments.
http://focus.ti.com/lit/ml/slup126/slup126.pdf.
37. ^ a b Billings, Keith (1999). Switchmode Power Supply Handbook. McGraw-Hill.
ISBN 0070067198.
38. ^ "400 Hz Electrical Systems". Aerospaceweb.org.
http://www.aerospaceweb.org/question/electronics/q0219.shtml. Retrieved May 21, 2007.
39. ^ Kubo, T.; Sachs, H.; Nadel, S. (2001) (PDF). Opportunities for new appliance and equipment
efficiency standards. American Council for an Energy-Efficient Economy. p. 39.
http://www.aceee.org/pubs/a016full.pdf. Retrieved June 21, 2009.
40. ^ Riemersma, H., et al.; Eckels, P.; Barton, M.; Murphy, J.; Litz, D.; Roach, J. (1981).
"Application of Superconducting Technology to Power Transformers". IEEE Transactions on
Power Apparatus and Systems PAS-100 (7): 3398. doi:10.1109/TPAS.1981.316682.
http://md1.csa.com/partners/viewrecord.php?requester=gs&collection=TRD&recid=0043264EA
&q=superconducting+transformer&uid=790516502&setcookie=yes.
41. ^ a b c Heathcote, Martin (November 3, 1998). J & P Transformer Book, Twelfth edition. Newnes.
pp. 41–42. ISBN 0750611588.
42. ^ Pansini, Anthony J. (1999). Electrical Transformers and Power Equipment. Fairmont Press.
p. 23. ISBN 0881733113.
43. ^ a b Nailen, Richard (May 2005). "Why we must be concerned with transformers". Electrical
Apparatus. http://findarticles.com/p/articles/mi_qa3726/is_200505/ai_n13636839/pg_1.
44. ^ a b c Daniels, A. R.. Introduction to Electrical Machines. pp. 47–49.
45. ^ a b Say, M. G. (February, 1984). Alternating Current Machines, Fifth Edition. Halsted Press.
pp. 142–143. ISBN 0470274514.
46. ^ Pansini. Electrical Transformers and Power Equipment. pp. 89–91.
47. ^ Commercial site explaining why autotransformers are smaller
48. ^ Bakshi, M. V. and Bakshi, U. A.. Electrical Machines - I. p. 330. ISBN 8184310099.
49. ^ a b Kulkarni, S. V. and Khaparde, S. A. (May 24, 2004). Transformer Engineering: design and
practice. CRC. pp. 36–37. ISBN 0824756533.
50. ^ Say, M. G. (February, 1984). Alternating Current Machines, Fifth Edition. Halsted Press.
p. 166. ISBN 0470274514.
51. ^ Hindmarsh. Electrical Machines and their Applications. p. 173.

52. ^ Abdel-Salam, M. et al.. High-Voltage Engineering: Theory and Practice. pp. 523–524.
ISBN 0824741528.
53. ^ Carr, Joseph. Secrets of RF Circuit Design. pp. 193–195. ISBN 0071370676.
54. ^ Guile, A. and Paterson, W. (1978). Electrical Power Systems, Volume One. Oxford: Pergamon
Press. pp. 330–331. ISBN 008021729X.
55. ^ Institution of Electrical Engineers (1995). Power System Protection. London: Institution of
Electrical Engineers. pp. 38–39. ISBN 0852968345.
56. ^ a b Hindmarsh, John (1984). Electrical Machines and their Applications. Pergamon. pp. 29–31.
ISBN 0080305733.
57. ^ Gottlieb, Irving (1998). Practical Transformer Handbook. Newnes. p. 4. ISBN 075063992X.
58. ^ a b c d McLyman, Colonel Wm. T. (2004). Transformer and Inductor Design Handbook. CRC.
Chap. 3, pp. 9–14. ISBN 0824753933.
59. ^ a b Harlow, James H.. Electric Power Transformer Engineering. Taylor & Francis. Chap. 2, pp.
20–21.
60. ^ Boteler, D. H.; Pirjola, R. J.; Nevanlinna, H. (1998). "The effects of geomagnetic disturbances
on electrical systems at the Earth's surface". Advances in Space Research 22: 17–27.
doi:10.1016/S0273-1177(97)01096-X.
61. ^ Hasegawa, Ryusuke (June 2, 2000). "Present status of amorphous soft magnetic alloys".
Journal of Magnetism and Magnetic Materials 215-216: 240–245. doi:10.1016/S0304-
8853(00)00126-8.
62. ^ McLyman. Transformer and Inductor Design Handbook. Chap. 3 p1.
63. ^ Lee, Reuben. "Air-Core Transformers". Electronic Transformers and Circuits.
http://www.vias.org/eltransformers/lee_electronic_transformers_07b_22.html. Retrieved May 22,
2007.
64. ^ a b c Central Electricity Generating Board (1982). Modern Power Station Practice. Pergamon
Press.
65. ^ Heathcote, Martin (November 3, 1998). J & P Transformer Book. Newnes. pp. 720–723.
ISBN 0750611588.
66. ^ a b c Kulkarni, S. V. and Khaparde, S. A. (May 24, 2004). Transformer Engineering: design and
practice. CRC. pp. 2–3. ISBN 0824756533.
67. ^ Pansini, Anthony J. (1999). Electrical Transformers and Power Equipment. Fairmont Press.
p. 32. ISBN 0881733113.
68. ^ a b Willis, H. Lee (2004). Power Distribution Planning Reference Book. CRC Press. p. 403.
ISBN 0824748751.
69. ^ a b ENERGIE (1999) (PDF). The scope for energy saving in the EU through the use of energy-
efficient electricity distribution transformers. http://www.leonardo-
energy.org/drupal/files/Full%20project%20report%20-%20Thermie.pdf?download.
70. ^ "ASTDR ToxFAQs for Polychlorinated Biphenyls". 2001.
http://www.atsdr.cdc.gov/tfacts17.html. Retrieved June 10, 2007.
71. ^ McDonald, C. J. and Tourangeau, R. E. (1986). PCBs: Question and Answer Guide Concerning
Polychlorinated Biphenyls. Government of Canada: Environment Canada Department. p. 9.
ISBN 066214595X. http://www.ec.gc.ca/wmd-dgd/default.asp?lang=En&n=AD2C1530-
1&offset=3&toc=show#anchor6. Retrieved November 7, 2007.
72. ^ Pansini, Anthony J. (1999). Electrical Transformers and Power Equipment. Fairmont Press.
pp. 66–67. ISBN 0881733113.
73. ^ Ryan, Hugh M. (2001). High Voltage Engineering and Testing. Institution Electrical Engineers.
pp. 416–417. ISBN 0852967756.
74. ^ Heathcote. J & P Transformer Book. p. 1.
75. ^ IEC 60404-2

References
Central Electricity Generating Board (1982). Modern Power Station Practice. Pergamon.
ISBN 0-08-016436-6.
Daniels, A.R. (1985). Introduction to Electrical Machines. Macmillan. ISBN 0-333-
19627-9.
Flanagan, William (1993). Handbook of Transformer Design and Applications. McGraw-
Hill. ISBN 0-0702-1291-0.
Gottlieb, Irving (1998). Practical Transformer Handbook. Elsevier. ISBN 0-7506-3992-
X.
Hammond, John Winthrop. Men and Volts, the Story of General Electric, published 1941
by J.B.Lippincott. Citations: design, early types - 106-107; design, William Stanley, first
built - 178; oil-immersed, began use of - 238.
Harlow, James (2004). Electric Power Transformer Engineering. CRC Press. ISBN 0-
8493-1704-5.
Heathcote, Martin (1998). J & P Transformer Book, Twelfth edition. Newnes. ISBN 0-
7506-1158-8.
Hindmarsh, John (1977). Electrical Machines and their Applications, 4th edition. Exeter:
Pergammon. ISBN 0-08-030573-3.
Kulkarni, S.V. & Khaparde, S.A. (2004). Transformer Engineering: design and practice.
CRC Press. ISBN 0-8247-5653-3.
McLaren, Peter (1984). Elementary Electric Power and Machines. Ellis Horwood.
ISBN 0-4702-0057-X.
McLyman, Colonel William (2004). Transformer and Inductor Design Handbook. CRC.
ISBN 0-8247-5393-3.
Pansini, Anthony (1999). Electrical Transformers and Power Equipment. CRC Press.
p. 23. ISBN 0-8817-3311-3.
Ryan, H.M. (2004). High Voltage Engineering and Testing. CRC Press. ISBN 0-8529-6775-6.
Say, M.G. (1983). Alternating Current Machines, Fifth Edition. London: Pitman. ISBN 0-273-
01969-4.
Winders, John (2002). Power Transformer Principles and Applications. CRC. ISBN 0-8247-
0766-4.
Gururaj, B.I. (June 1963). "Natural Frequencies of 3-Phase Transformer Windings". IEEE
Transactions on Power Apparatus and Systems 82 (66): 318–329.
doi:10.1109/TPAS.1963.291359.
http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?isnumber=4072786&arnumber=4072800&count=2
5&index=12.
Three-phase transformer circuits

Since three-phase is used so often for power distribution systems, it makes sense that we would
need three-phase transformers to be able to step voltages up or down. This is only partially true,
as regular single-phase transformers can be ganged together to transform power between two
three-phase systems in a variety of configurations, eliminating the requirement for a special
three-phase transformer. However, special three-phase transformers are built for those tasks, and
are able to perform with less material requirement, less size, and less weight than their modular
counterparts.
A three-phase transformer is made of three sets of primary and secondary windings, each set
wound around one leg of an iron core assembly. Essentially it looks like three single-phase
transformers sharing a joined core as in Figure below.
Three phase transformer core has three sets of windings.
Those sets of primary and secondary windings will be connected in either Δ or Y configurations
to form a complete unit. The various combinations of ways that these windings can be connected
together in will be the focus of this section.
Whether the winding sets share a common core assembly or each winding pair is a separate
transformer, the winding connection options are the same:
Primary - Secondary
Y - Y
Y - Δ
Δ - Y
Δ - Δ
The reasons for choosing a Y or Δ configuration for transformer winding connections are the
same as for any other three-phase application: Y connections provide the opportunity for
multiple voltages, while Δ connections enjoy a higher level of reliability (if one winding fails
open, the other two can still maintain full line voltages to the load).
Probably the most important aspect of connecting three sets of primary and secondary windings
together to form a three-phase transformer bank is paying attention to proper winding phasing

(the dots used to denote ―polarity‖ of windings). Remember the proper phase relationships
between the phase windings of Δ and Y: (Figure below)
(Y) The center point of the ―Y‖ must tie either all the ―-‖ or all the ―+‖ winding points together.
(Δ) The winding polarities must stack together in a complementary manner ( + to -).
Getting this phasing correct when the windings aren't shown in regular Y or Δ configuration can
be tricky. Let me illustrate, starting with Figure below.
Inputs A1, A2, A3 may be wired either ―Δ‖ or ―Y‖, as may outputs B1, B2, B3.
Three individual transformers are to be connected together to transform power from one three-
phase system to another. First, I'll show the wiring connections for a Y-Y configuration: Figure
below

Phase wiring for ―Y-Y‖ transformer.
Note in Figure above how all the winding ends marked with dots are connected to their
respective phases A, B, and C, while the non-dot ends are connected together to form the centers
of each ―Y‖. Having both primary and secondary winding sets connected in ―Y‖ formations
allows for the use of neutral conductors (N1 and N2) in each power system.
Now, we'll take a look at a Y-Δ configuration: (Figure below)

Phase wiring for ―Y-Δ‖ transformer.
Note how the secondary windings (bottom set, Figure above) are connected in a chain, the ―dot‖
side of one winding connected to the ―non-dot‖ side of the next, forming the Δ loop. At every
connection point between pairs of windings, a connection is made to a line of the second power
system (A, B, and C).
Now, let's examine a Δ-Y system in Figure below.
Phase wiring for ―Δ-Y‖ transformer.
Such a configuration (Figure above) would allow for the provision of multiple voltages (line-to-
line or line-to-neutral) in the second power system, from a source power system having no
neutral.
And finally, we turn to the Δ-Δ configuration: (Figure below)

Phase wiring for ―Δ-Δ‖ transformer.
When there is no need for a neutral conductor in the secondary power system, Δ-Δ connection
schemes (Figure above) are preferred because of the inherent reliability of the Δ configuration.
Considering that a Δ configuration can operate satisfactorily missing one winding, some power
system designers choose to create a three-phase transformer bank with only two transformers,
representing a Δ-Δ configuration with a missing winding in both the primary and secondary
sides: (Figure below)

―V‖ or ―open-Δ‖ provides 2-υ power with only two transformers.
This configuration is called ―V‖ or ―Open-Δ.‖ Of course, each of the two transformers have to be
oversized to handle the same amount of power as three in a standard Δ configuration, but the
overall size, weight, and cost advantages are often worth it. Bear in mind, however, that with one
winding set missing from the Δ shape, this system no longer provides the fault tolerance of a
normal Δ-Δ system. If one of the two transformers were to fail, the load voltage and current
would definitely be affected.