-
7/30/2019 Barry Solomon Scholarly Paper
1/93
An EVA Mobility System for NEO Surface Exploration, and an
Assessment of
Human Locomotion in a Simulation Environment
Barry Nicholas Solomon, Master of Science: Aerospace Engineering
2012
Advised by Professor David L. Akin, Department of Aerospace
Engineering
AbstractNASAs next stated frontier of human space exploration,
is a mission to a Near Earth Asteroid. In
order to accomplish such an extraordinary feat, many new
technologies will need to be created
and paired with existing NASA expertise. Proposed herein is a
technology that provides mobility
to astronauts while preforming EVAs on the surface of an
asteroid. Unlike the Earth, Moon, and
Mars which have high enough levels of gravity as to enable
people to walk on their surfaces,
most asteroids, specifically those near Earth (NEOs), have very
low levels of gravity. Therefore
technology needs to be employed to make human exploration of an
asteroids surface a
possibility. To that end the author of this report is proposing
a system which secures an astronaut
to the surface of an asteroid and provides them with a perceived
level of gravity which enables
them to explore the surface. The design driver of this study was
to create a system which
provides the most utility to the mission for the lease amount of
system mass. In addition to the
top level development of this technology, an experimental study
was done to help determine one
aspect of the detailed design. The goal of the experiment was to
investigate human locomotion,
in a weightless environment, where an external load is applied
to the body center of mass. Such
is the environment provided by the mobility system designed
herein, and thus understanding
human locomotion in this environment will help to decide what
level of downforce should be
provided to the user. From this investigation, it was concluded
that a downforce level equal to
13.3% of the subjects body mass would be the most advantages
choice. However as is
discussed, more scenarios need to be studied to prove this
result, especially locomotion while
wearing a spacesuit.
-
7/30/2019 Barry Solomon Scholarly Paper
2/93
An EVA Mobility System for NEO Surface Exploration, and an
Assessment of
Human Locomotion in a Simulation Environment
By
Barry Solomon
Scholarly Paper submitted to the Faculty of the Graduate School
of the University of
Maryland, College Park, in partial fulfillment of the
requirements for the degree of Master
of Science in Aerospace Engineering
August, 2012
Advisor: Professor David L. Akin
-
7/30/2019 Barry Solomon Scholarly Paper
3/93
Copyright
Barry Solomon2012
-
7/30/2019 Barry Solomon Scholarly Paper
4/93
Table of ContentsAbstract
...........................................................................................................................................
1
List of Tables
..................................................................................................................................
7
List of Figures
.................................................................................................................................
7
Objectives
.......................................................................................................................................
8
Part One: Asteroid mobility System Design
...................................................................................
8
Introduction
.................................................................................................................................
8
Possible Destinations
...............................................................................................................
8
The Overall
Technology..............................................................................................................
9
The Suit Ring
...........................................................................................................................
9
Utilization on Solid Asteroids
...................................................................................................
10
The Anchors
..........................................................................................................................
10
The Tethers
............................................................................................................................
11
Anchor Formations
................................................................................................................
12
Transitioning Between Anchors
............................................................................................
13
Alternative: Parallel Deployment:
.........................................................................................
14
Anchor Deployment
..............................................................................................................
15
Utilization on Soft Asteroids
.....................................................................................................
18
Anchors
..................................................................................................................................
18Tethers and Tension Rigs
......................................................................................................
18
Exploration
............................................................................................................................
19
Anchor Deployment
..............................................................................................................
19
Surface Operation Considerations
.............................................................................................
20
Astronaut Surface Descent and Ascent Strategy
.......................................................................
20
Power Requirements
.................................................................................................................
21
Possible and Proposed alternatives
...........................................................................................
22
Boom Arm
.............................................................................................................................
22
Astronaut Maneuvering Unit (AMU)
....................................................................................
24
Alternative Anchor
systems...................................................................................................
24
Mission with no EVA
............................................................................................................
27
Downside to Anchors
............................................................................................................
27
-
7/30/2019 Barry Solomon Scholarly Paper
5/93
Comparison of
alternatives........................................................................................................
27
Other Items to discuss
...............................................................................................................
28
Emergency Astronaut Retrieval
.............................................................................................
28
Locomotion in the System
.....................................................................................................
29
Further Study Required
.............................................................................................................
30
Appendix One
...........................................................................................................................
31
A - Harpoon Anchor System for Solid Asteroids a Detailed
Description ............................. 31
B - Anchor Mass Estimate for Solid Asteroids
.....................................................................
35
C - Mass Calculations for Anchor Formations on Solid Asteroids
....................................... 38
D- Mass specific area of exploration for proposed systems and
alternatives ........................ 40
E- Activity Estimation
...........................................................................................................
44
F: Mathematica Code to determine hovering V costs per
day......................................... 46
Part Two: Experiment to help with design
requirements..............................................................
48
Introduction
...............................................................................................................................
48
Background
...............................................................................................................................
48
Possible Testing Environments
.............................................................................................
49
Previous Findings on Gait analysis
.......................................................................................
50
Test Hardware and Equipment
..................................................................................................
55
Treadmill
...............................................................................................................................
55Simulated Mobility System
...................................................................................................
56
Tower
.....................................................................................................................................
56
Motion Capture System
.........................................................................................................
56
Air
Supply..............................................................................................................................
57
Experiment Protocols
................................................................................................................
58
Subjects
..................................................................................................................................
58
Dive Crew
..............................................................................................................................
58
Test Procedure
.......................................................................................................................
59
Comments made by the participants
......................................................................................
60
Comments of the
Investigator................................................................................................
60
Sources of Measurement Error
..............................................................................................
61
Motion Capture Data processing
...............................................................................................
62
-
7/30/2019 Barry Solomon Scholarly Paper
6/93
Motion Capture Data
.................................................................................................................
65
Data Analysis
............................................................................................................................
68
Discussion of Results
................................................................................................................
69
Number of Steps
....................................................................................................................
70
Speed
.....................................................................................................................................
71
Metabolic Rate
.......................................................................................................................
72
Cost of Transport
...................................................................................................................
73
Conclusions
...........................................................................................................................
73
Acronyms
......................................................................................................................................
75
Appendix Part Two
...................................................................................................................
76
MatLab Code
.........................................................................................................................
76
Works Cited
..................................................................................................................................
90
-
7/30/2019 Barry Solomon Scholarly Paper
7/93
List of TablesTable 1: Power requirements.
.......................................................................................................
21
Table 2: Mass Specific Area of Exploration.
................................................................................
28
Table 3: Maximum motor torque and power required.
.................................................................
36
Table 4: Mass estimate of anchor by
component..........................................................................
36Table 5: Anchor mass optimization.
.............................................................................................
38
Table 6: System mass required and the explorable area provided
by different configurations. ... 39
Table 7: Calculation of Mass Specific Area of Exploration.
........................................................ 41
Table 8: Mass estimating relationships
.........................................................................................
42
Table 9: Summary of the EVA protocol activities for Apollo
14-16. .......................................... 45
Table 10: Calculation of the non-dimensional parameters..
......................................................... 63
Table 11: Metrics from all 3 subjects
...........................................................................................
65
Table 12: Metrics from all 3 subjects
...........................................................................................
66
Table 13: Metrics from all 3 subjects
...........................................................................................
67
Table 14: Number of steps per distance traveled, and per time
spent walking. ........................... 71Table 15: Sensitivity
of the determination of whether a step is running.
..................................... 71
Table 16: Metabolic rate ratio.
......................................................................................................
72
Table 17: Froude numbers and cost ratios
....................................................................................
73
List of FiguresFigure 1: Astronaut using the mobility system on
a solid asteroid ...............................................
10
Figure 2: A rendering of the anchor
..............................................................................................
11
Figure 3: Area formation shapes.
..................................................................................................
12
Figure 4: Hybrid formation.
..........................................................................................................
13
Figure 5: An Astronaut using the Parallel Deployment scheme
................................................... 15
Figure 6: Depictions of the way the anchors would connect to one
another during deployment . 15
Figure 7: Depiction on an astronaut using the soft asteroid
mobility system. .............................. 19
Figure 8: A depiction of the PMU on top of a stack of ASPs.
...................................................... 20
Figure 9: A depiction of the harpoon in its launch tube.
..............................................................
31
Figure 10: Depiction of the cable reel..
.........................................................................................
33
Figure 11: Harpoon, cable reel, anchor bottom plate, and anchor
base attach together. .............. 34
Figure 12: Tension rig mounted to the anchor bottom plate.
........................................................ 34
Figure 13: Approximate locations of the motion capture markers
............................................... 57Figure 14:
Subject walking in the test environment.
....................................................................
58
Figure 15: Graph of Downforce and speed.
..................................................................................
71
Figure 16: Graph of Froude number at each downforce level..
.................................................... 72
Figure 17: Graph of downforce and metabolic cost ratio
.............................................................
72
http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690213http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690213http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690216http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690216http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690222http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690222http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690225http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690225http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690227http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690227http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690227http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690225http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690222http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690216http://c/Documents%20and%20Settings/barry%20solomon/My%20Documents/NEO%20mobility/Barry%20Solomon%20Masters%20Thesis.docx%23_Toc331690213
-
7/30/2019 Barry Solomon Scholarly Paper
8/93
ObjectivesThe overarching goal of this paper was to design a
mobility system that provides astronauts the
ability to walk on the surface of small asteroid. This included
top level design of the hardware
and plans for deployment and usage, as well as a comparison of
the system to other proposed
methodologies for human asteroid exploration. This paper also
begins to explore in depth aspecific aspect of the mobility system,
which is the determination of the downforce level to be
applied to the astronaut via the mobility system
Part One: Asteroid mobility System Design
Introduction
NASA has long talked about sending astronauts to visit an
asteroid, and more recently the
President of the United States has made this goal part of the
current roadmap for human
exploration. In order to accomplish such an extraordinary feat,
many new technologies will needto be created and paired with
existing NASA expertise. Proposed within the following report
is
one such technology. The hurdle this technology addresses is
that of providing mobility to
astronauts while preforming EVAs on the surface of an asteroid.
Unlike the Earth, Moon, and
Mars which have high enough levels of gravity as to enable
people to walk on their surfaces,
most asteroids, specifically those near Earth (NEOs), have very
low levels of gravity which
would make walking or working on their surfaces almost
impossible. Therefore technology
needs to be employed to make this impossibility, a possibility.
To that end the author of this
report is proposing a system which secures an astronaut to the
surface of an asteroid and provides
them with a perceived level of gravity which enables them to
explore the surface. Furthermore in
an effort to accommodate multiple mission architectures and
destinations, instead of proposing a
single technology, a family of technologies with alternatives
implementations is provided.
Possible Destinations
While astronauts could conceivably visit any asteroid, more
practically they will visit an asteroid
which is relatively close to earth, a NEO. Much study has been
done to assess which NEOs could
be candidates for possible human missions within the next few
decades. It is not relevant to this
report to discuss what makes a NEO a potential mission
candidate, other than to say the
requirements are based on mission duration, delta-v, and earth
reentry velocity. However it is
important for this report to understand the characteristics of
these candidate NEOs.
There are only a small number of known NEOs to date which could
be considered possible
candidates for early mission. A high estimate might be 20
different asteroids. These asteroids are
all quite small, on the order of 25 to 100 meters in diameter.
Diameters of that magnitude mean
that these objects have extremely low levels of gravity,
negligible levels from an EVA mobility
standpoint. Additionally these NEOs most likely have several
characteristics that set them apart
from one another, the most important of which is their
composition. Some of these asteroids may
-
7/30/2019 Barry Solomon Scholarly Paper
9/93
be little more than loose accumulations of rock and dust, while
others may be solid bodies of
rock, or something in between. In general this report will refer
to two types of aster oids, soft
and solid. Soft asteroids are ones where securing an anchor to
the surface would be impossible,
either due to extremely deep layers of regolith, or due to the
fact that the asteroid is made up of a
loose pile of rocks. Solid asteroids are therefore ones where
the asteroid is for the most part a
single large rock body into which anchors could be secured.
Currently there is not much information available about the
physical nature of these candidate
NEOs. Scientists can make assumptions based on information known
about other asteroids, and
using correlations to draw conclusions, but in fact the physical
properties of these candidate
destinations is still unknown. Thus this report will provide
methods to explore several types of
NEOs.
The Overall Technology
The core idea behind this family of technologies is that
multiple tethers actively pull down on the
astronaut, providing a net vertical external force downward.
Different situations might call for
different amounts of tethers (two, three, or four), and this
will be explained later. The tethers are
attached at one end to the surface, and at the other end to a
ring which clips around the astronauts
space suit. Depending on the type of asteroid being visited
(solid or soft as explained above), the
method by which the tethers attach to the surface is different
(as will be explained below).
However in either case one end of the tether is attached to a
tension rig. Within this rig is a
spindle which wraps excess tether length around it, and an
electric motor connected to the
spindle. The motor acts to generate a tension in the tether, and
the tension forces from multiple
tethers acts to keep an astronaut grounded. The resultant force
of the multiple tethers should be
zero in all but the vertical direction. Furthermore the tension
in each tether is monitored and
actively controlled independently to generate a specific and
constant net downward force on the
astronaut. Based on the orientation of the astronaut, their limb
joint angles, and any force the
astronaut exudes on the tethers (i.e. in attempting to walk),
the tethers will attempt to retract and
extend as required to accommodate the motion of the astronaut
while maintaining the desired
constant downward force (downforce).
The Suit Ring
There are two main parts to the suit ring. The first is a ring
that is integrated into the suit
(permanently part of the suit), and is situated at the wait of
the astronaut on the exterior of the
suit. This feature is referred to herein as the Astronaut Suit
Ring (ASR). The second part is the
Suit Connector Ring (SCR), which is essentially two halves of a
ring which are hinged at one
end and can clasp at the other end. In use, the SCR attaches
around the ASR, and bearings built
into the ASR allow the two rings to rotate freely, one within
the other. An encoder system built
into the two rings monitors their relative orientations.
Furthermore as part of the whole mobility
system, the SCR attaches to the open end of the tethers, and
this is how the astronaut is attached
to the system. This suit ring is exactly the same for all types
of missions. This was done to make
-
7/30/2019 Barry Solomon Scholarly Paper
10/93
sure that the space suits designed for the one mission would be
applicable to all future asteroid
missions, no matter the asteroid type.
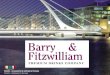
Utilization on Solid Asteroids
Figure 1: This is a simple depiction of an astronaut using the
mobility system on a solid asteroid. The blue cylinder is
representative of an anchor. The astronaut is exploring the
triangular area between three anchors.
The Anchors
For an asteroid of solid monolithic constitution where items can
be rigidly attached to its surface,
a system of anchors would be used as the surface attachment
points for the tethers. In this setup,
the tension rig would be housed within the anchor, and the free
end of each tether would be
connected directly to the SCR. The anchor would have the ability
to raise, lower and rotate the
point at which the tether leaves the anchor. This functionality
is required by the control system to
provide the correct tension in the tether, as well as by the
system to function in an auxiliary mode
that will be explained later (Alternative Parallel Deployment)
.The anchor would also house all
of the equipment it would need to attach itself to the surface.
Several methods of attachment are
explored in the Anchor Deployment section below. The anchor
itself has no other function than
to keep the tension rig (and thereby the astronaut) secured to
the surface. However for the
remainder of the section on solid asteroids the use of the term
anchor will also refer to the
tension rig as it is housed within the anchor. A concept of this
anchor can be seen in Figure 2below. A full description of the
anchor design can be found in Appendix One: A.
-
7/30/2019 Barry Solomon Scholarly Paper
11/93
Figure 2: A rendering of what the actual anchor might look like.
This is an anchor for a solid asteroid. The wide cylinder to
the
left is an integrated harpoon. The tether would be wound around
the spindle in the center, and would be strung through the
two sets of pulleys on the right. For deployment the tension rig
would be covered with a housing, but no housing is shown
here so that the mechanics can be seen. A full description can
be found in Appendix One: A - Harpoon Anchor System for
Solid Asteroids a Detailed Description
The Tethers
The tethers in addition to their obvious tethering function,
also act as power and data
transmission cables. By enabling the tethers to transmit power,
the need to power each anchor
independently is removed. All of the anchors would then be
powered by the main spacecraft,
which would connect to one of the anchors via a tether, and that
anchor would in turn power all
the other anchors. Additionally the anchors would transmit their
sensory data (i.e. tether tension,length, and angle) through the
tethers and back to the spacecraft, so that the system could
maintain its desired functionality. This removes the need for
the anchors themselves to have
complicated computational capacity or wireless transmission
capabilities. However if it was
found that the cabling required to accomplish the data
transmission was more massive than
giving each anchor computing and wireless communication
capabilities, then that option could
be used as well. This decision would be mission specific though,
and depend on the number of
-
7/30/2019 Barry Solomon Scholarly Paper
12/93
anchors, the length of the tethers, and the desired distance of
the spacecraft from the asteroid.
When the tethers are not attached to the SCR, they are attached
directly to a subsequent anchor.
More information on attachment schemes is discussed below. The
tether ends would be
data/power plugs, which quick connect to attachment points.
Anchor FormationsThe Anchors could be deployed in many different
formations which essentially allow for two
different types of exploration. The most basic formation would
be in a line. In this type of
formation only two tethers at a time would be connected to the
SCR. This would allow the
astronaut to move in a straight line between the two anchors.
Additionally if an astronaut
finished exploring the region between the first two anchors,
they could move on to the area
between the second anchor and the third anchor, and so on until
the last anchor. The second type
of formation would be one in which three or more tethers are
connected to the SCR at any given
time. This would allow the astronaut to explore the region
(triangular or otherwise) bound by the
anchors to which they are attached. Similar to the line
formation, the astronaut could transfer
between successive sets of anchors to explore multiple
areas.
In general, the area formation would make much better use of the
available anchors and give the
astronaut much greater freedom in exploration. However in some
situations the area formation
might not be advantageous over the line formation. The line
formation is useful when it is
desirable for the astronaut to cover a very long distance as
opposed to a large area, or when the
asteroid lacks any large area without depressions making it
difficult to utilize an area formation.
Additionally, in some instances it might be beneficial to
combine the two types of formations.
Such a situation might be when there are two areas to be
explored which are separated by a
sizable distance. The two areas would each need at least three
anchors to be explored, and the
two areas could be connected by just two anchors, which the
astronaut uses to transition between
areas. It all depends on the surface landscape and the mission
goals.
1
23
4
5
6
7
KEY
Anchor
Figure 3: Examples of various area formation shapes. In the
formation to the right, there are 7 explorable areas.
The astronaut would first explore area-1 and could sequentially
move through each of the areas.
-
7/30/2019 Barry Solomon Scholarly Paper
13/93
Figure 4: This is a hybrid formation. In it there are two area
formations and one line formation. This configuration might be
used if there were very specific targets identified for
exploration. However this configuration is less efficient (in terms
of
total explorable area per anchor) than using areas which share
sides, as in Figure 3.
A broader discussion of the possible anchor formations and an
assessment of the efficiency of
each is provided in Appendix One: C. The conclusion of that
discussion is that, mission factors
aside, the equilateral triangle formation is the most efficient
formation, in terms of system mass
per area explored.
Transitioning Between Anchors
The Following two sections outline possible procedures an
astronaut would follow to transition
between sets of anchors. The two protocols below are meant to be
illustrative of how such a
system might work, and not an exhaustive study of all of the
possible transitions required by the
many types of formations allowed by this family of
technologies.
Line Formation
To transition from the region between one set of anchors (i.e.
anchors 1 and 2 ) to the next
(anchors 2 and 3), the astronaut would adhere to the following
protocol. It is helpful to note here
that the free end of the tether-3 would be attached to anchor-2
before deployment.
1. Walk as close as possible to the second anchor.
2. Clip a safety line from the suit to the anchor.
3. Command tension rigs 1, 2, and 3 to maintain zero tension in
their tethers.
4. Clip a second safety line from tether-1 to the anchor.
5. Unhook tether-1 from the SCR and attach it to the anchor.
6. Remove the safety line which connected tether-1 to the
anchor.
7. Clip a third safety line from the anchor to the tether-3
(which itself is already connected
to the anchor).
8. Attach tether-3 to the SCR.
9. Remove the safety line which connected tether-3 to the
anchor.
10.Remove the safety line which connected suit to the
anchor.
-
7/30/2019 Barry Solomon Scholarly Paper
14/93
11.Command tension rigs 2 and 3 to reassume tension in their
tethers.
12.Begin traversing the line between anchors 2 and 3.
Triangle Area Formation
To transition from the area between one set of anchors (i.e.
anchors 1, 2, and 3) to the next
(anchors 2, 3 and 4), the astronaut would adhere to the
following protocol. Note in this situationonly one tether is being
exchanged for a new one and the second triangular area shares one
side
with the first. Also note that tether-4 would be attached to
anchor-2 before deployment.
1. Walk as close as possible to the anchor-2.
2. Clip a safety line from the suit to the anchor.
3. Command tension rigs 1, 2, 3, and 4 to maintain zero tension
in their tethers.
4. Clip a second safety line from tether-1 to the anchor.
5. Unhook tether-1 from the SCR and attach it to the anchor.
6. Remove the safety line which connected tether-1 to the
anchor.
7. Clip a safety line from the anchor to the tether-4 (which
itself is already connected to theanchor).
8. Attach tether-4 to the SCR.
9. Remove the safety line which connected tether-4 to the
anchor.
10.Remove the safety line which connected suit to the
anchor.
11.Command tension rigs 2, 3, and 4 to reassume tension in their
tethers.
12.Begin traversing the area between anchors 2, 3, and 4.
Alternative: Parallel Deployment:
For some EVAs it might be beneficial to use an alternative
deployment of this system depending
on the activities to be completed during the EVA. The
alternative deployment would allow anastronaut to explore the
surface of the asteroid while maintaining their body parallel to
the
asteroid surface. To do so, a new piece of equipment needs to be
introduced, the Parallel
Movement Adapter (PMA). The PMA is basically a rod with a plate
on one end, which attaches
to the back of the spacesuit just below the ASR, at the free end
of the rod. The disk end has a
copy of the ASR mounted to its diameter, and this fits inside
the SCR just as the ASR would.
Once the PMA is connected to both the suit and the SCR, then the
astronaut is ready to explore
the surface (see Figure 5: An Astronaut using the Parallel
Deployment scheme). This deployment
will keep the astronaut parallel to and a fixed distance from
the surface. Locomotion will be
semi-automated with commands given by the EVA astronaut or by a
fellow astronaut aboard the
spacecraft. Sensors integrated into the suit and anchors, will
orchestrate a cohesive response
from all the tethers connected to the SCR. Part of this sensor
package would be distance sensors,
which help automatically maintain the astronaut at a specific
height regardless of changes in the
terrain. Their height is determined by the height of the second
pulley on the anchor, which is
controllable.
-
7/30/2019 Barry Solomon Scholarly Paper
15/93
Figure 5: An Astronaut using the Parallel Deployment scheme
The main advantages of this system deployment are lower energy
expenditure by the astronaut,
lower energy consumption by the tension rigs, no dust turned up
by foot traffic, and ease of
interaction with the surface. This type of setup would be ideal
for situations where an astronaut
needs to use their hands for an extended period of time in close
proximity to the surface, or when
an astronaut wants to set up a device on the surface which would
be sensitive to dust occlusion.The main drawback of such a
deployment is that the astronaut would not have a very large
field
of vision. This may or may not hinder the astronaut depending on
their duties. However this
shortfall could be rectified though the use of cameras mounted
atop the PMA plate. The cameras
could provide views of the landscape in every direction which
would be viewed by the astronaut
in a HUD integrated into the spacesuit helmet. Additionally, the
astronaut could at any time
easily switch into the standard deployment mode by removing the
PMA, and attaching the SCR
around the suit.
Anchor Deployment
Several methods for deploying the anchors are described below,
yet they all share two commonfeatures. First, each anchors has
three legs which allow it to come to a level position after
landing. Second, all of the anchors will be connected to one
another before and after deployment.
The anchors are connected to one another via their tethers, and
the first anchor is also connected
to the main spacecraft via a master tether. More precisely, the
tether of the first anchor is
attached to nothing during deployment, and each subsequent
tether is attached to the previous
anchor.
The reason for choosing one anchor deployment method
over another would come down to TRLs and mass
estimates once the various options were investigatedfurther.
Additionally the physical properties of a particular
asteroid might negate the use of one or more of the options
(i.e. an asteroid that is too hard to penetrate with a
harpoon).
KEY
Anchor
Figure 6: Depictions of the way the anchors would connect to one
another during deployment
-
7/30/2019 Barry Solomon Scholarly Paper
16/93
Harpoon
This method would call for each of the anchors to have a harpoon
loaded into the bottom of the
anchor. The main spacecraft would position itself over the
location for the first anchor and that
anchor would fire its harpoon towards the surface. Once the
harpoon was embedded securely
into the surface, the first anchor would be released from the
spacecraft. The spacecraft would
then proceed to position itself over the other anchor locations
and allow the remaining harpoons
to embed themselves followed by the release of each associated
anchor. Once all of the anchors
were released from the spacecraft, each anchor would
simultaneously reel themselves down to
the surface on their harpoon cable1.
Before being fired, the harpoon would be situated in a gas gun
on the underside of the anchor.
The harpoon would be propelled away from the anchor by the
release of a pressurized cartridge
in the gas gun. Immediately following the exit of the harpoon,
the gas from the gun would be
allowed to exit out of the top of the anchor, in an attempt to
negate the momentum imparted by
the harpoon. However the main spacecrafts RCS would have to
augment this effort. The
harpoon itself would pierce the asteroid burrowing below the
surface at which point it would
release barbs from the harpoon shaft which would secure the
harpoon to the asteroid2.
Thrusters/harpoon
An alternative harpoon method is one in which the anchors are
all free flying vehicles. The
anchors would leave the main spacecraft (tethered together as
always), and each anchor would
fly independently3
to a position just above its intended ground location. Close
proximity with the
asteroid is required so that when the harpoon is released and
the anchor begins moving in the
opposite direction, the harpoon tether is not exhausted before
the harpoon is secured in the
surface. Once all of the anchors were in place, they would each
fire their harpoon, and then reel
themselves down to the surface. These anchors would be much more
complicated than the ones
described previously. The anchors would require fuel, thrusters,
reaction wheels, greater thermal
control, and navigational sensors. However their power and data
processing needs would be
handled by the main spacecraft as data and power would be
transmitted over the tethers.
1The reason to reel all of the anchors down at the same time is
to maximize the distance between anchors. For
example, assume two anchors are being deployed and each has a
tether length of 20m. The two anchors would be
connected by tether #2, so the farthest apart they could be
would be 20m. Assume also that the spacecraft mustmaintain at least
10m between itself and the asteroid. This means that a spacecraft
10m up from the surface could at
most be 17.3 surface meters away from the first anchor (if the
first anchor was on the surface, and the second anchor
was still attached to the spacecraft). If the anchors are reeled
down simultaneously at the end, they could be their
maximum distance apart (20m).2
The implementation of the harpoon idea was heavily inspired by
the harpoon on the Philae lander on the Rosetta
spacecraft [45] [7]. The main difference being the idea
presented herein to release the gun exhaust to offset the
momentum transfer.3
The anchors would not fly completely independently. They would
be tethered together, and while the tethers would
be limp during flight, they still might generate some coupling
between the anchors.
-
7/30/2019 Barry Solomon Scholarly Paper
17/93
-
7/30/2019 Barry Solomon Scholarly Paper
18/93
Tether Length on Solid Asteroids
In the anchor formation analysis, an estimate of 20 meters was
used for the tether length, but the
optimal tether length would be asteroid and mission specific.
The main reason to optimize tether
length is to reduce mission mass. This reduction in mass comes
partially from a reduction in the
tether itself, however the tether material is relatively light
per unit length. The majority of the
mass savings from a shorter tether comes from the thickness of
tether on the tether spool being
less. This reduction ultimately reduces the necessary mass of
the tether spooling motor. The
more layers of excess tether on the spool there are, the lower
the tension in the tether will be for
a given torque of the spool by its motor. This is a simple
matter of . The more excess
tether there is, the larger the effective spool radius is, and
the greater the motor torque required to
produce a given tether tension. Therefore if the tether length
is optimized to the mission, then the
motor choice can also be optimized for the mission.
Utilization on Soft Asteroids
Anchors
The implementation of these technologies changes quite a bit for
a mission to an asteroid where
securing a traditional anchor would be impossible. In the case
of a soft asteroid, the anchor
system would consist mainly of two circumferential ropes. The
two ropes would run parallel to
each other, separated by a distance that would determine the
explorable area. Furthermore the
circumferential ropes would, as the name implies, each encircle
the entire circumference of the
asteroid. Attached to the ropes would be several wide plates
which act to keep the ropes from
cutting (or sinking) into the asteroid. These Anti Sinking
Plates (ASPs) would be attached to the
ropes at a predetermined intervals prior to deployment. The
interval and size of the plates would
be heavily dependent on the physical properties of each
individual asteroid. Additionally theplates would have small spikes
on the bottom to help them gain traction with the surface.
Tethers and Tension Rigs
In this situation the tension rigs, of which there would be two,
connect directly to the SCR. The
tethers emanate from the tension rig just as before, and the
free end of the tether connects to a
circumferential rope. The connection between the tethers and the
circumferential ropes would be
a free one, such that the tethers could move freely along the
ropes as the astronaut walked in the
direction parallel to the ropes. The tethers in this
implementation would not need to carry power
or data, as the tension rigs would both be attached to the
astronaut. The tension rigs would get
their power in one of two ways. For short EVAs (under 2 hours),
power could come from extrabatteries attached to the space suit.
For longer duration EVAs, the tension rigs would be powered
by a tether that goes directly to the astronaut.
-
7/30/2019 Barry Solomon Scholarly Paper
19/93
Figure 7: Depiction on an astronaut using the soft asteroid
mobility system. Two ASPs can be seen just behind the
astronaut.
The blue boxes represent the tension rigs.
ExplorationUnlike the system proposed for solid asteroids, this
system would allow multiple astronauts to
explore the same area simultaneously4. Additionally using this
system, the astronauts would have
the entire area between the two circumferential ropes to
explore. If one assumed a distance of 5
meters between the ropes, and assumed the asteroid was 60 meters
in diameter, then the
astronauts would have almost 950m2, or more than 10,000ft2 to
explore. This would be roughly
the same amount of area as explored by the Apollo 11 crew on the
moon, if not a greater area.
Furthermore this area could possibly be increased by moving the
circumferential ropes further
apart. However this is subject to the dimensions of the
asteroid. The ropes cannot move too far
from the centerline of a spherical asteroid without slipping off
of it under tension.
Anchor Deployment
On asteroids that are less cohesive, the anchors as previously
described are two circumferential
ropes with anti-sinking plates (ASPs) attached at specific
intervals. Each Rope and its ASPs are
initially a single ridged device as depicted in Figure 8 below.
Each ASP is connected to the
following ASP by the circumferential rope. Additionally atop
each stack of ASPs is a spacecraft,
the Plate Maneuvering Unit (PMU), which plays two roles. First
it moves the stack of ASPs
around the asteroid and releases an ASP at every interval. Once
that is completed, the PMU
which is attached to the end of the circumferential rope, flies
back to the first ASP and docks
with it. Once the PMU is docked to the first ASP, it tightens
the circumferential rope until the
whole unit is secured tightly to the surface. See Figure 7 above
for more clarification.
4The reason that the circumferential ropes method was not
suggested for solid asteroids as well, is because the
system is much more restrictive in terms of the area that can be
explored. It may also be more massive. However the
circumferential ropes would work just as well on a solid
asteroid.
-
7/30/2019 Barry Solomon Scholarly Paper
20/93
Figure 8: A depiction of the PMU on top of a stack of ASPs. The
grey coils are the circumferential ropes. The ropes are wound
in such a way that they will uncoil without spinning the
ASPs.
Furthermore, the two PMUs (one for each rope) are fully
functional spacecraft. They would
possess the ability to operate completely independently of the
main spacecraft. The idea of
having the PMUs be tethered to the main spacecraft and possess
limited capabilities similar to
the other anchors, was considered. However as the PMUs have to
circumnavigate the entire
asteroid, it was determined that having them be tethered to the
main spacecraft would be too
cumbersome. However If it is determined that it would be too
expensive to develop secondary
spacecraft which such advanced capabilities (i.e. Automatic
rendezvous and Docking), then
perhaps it would be possible for the main spacecraft to do the
deployment, but this depends on
how close the main spacecraft I allowed to get to the
asteroid.
Surface Operation Considerations
For operations in either type of system, there may be times
where the astronaut needs to stand
still, or times where the astronaut needs to react a higher
level of force to the ground than the
downforce provided by mobility system. In order to allow this
functionality, the astronaut can
command the tension rigs to lock. In that way the astronaut can
generate much higher forces with
the ground, or the astronaut can bend over and stay
grounded.
Astronaut Surface Descent and Ascent Strategy
There are several options for transferring the Astronauts from
the spacecraft to the mobilitysystem on the surface of the
Asteroid. These options include transferring them on a boom,
allowing them to jet over using an MMU, or having them climb to
the surface on a tether. The
boom is a good idea if the main spacecraft is allowed to get
close enough for the boom to reach
the surface. However unless the boom was already part of the
mission design, it would add a lot
of mass to accomplish one function. The MMU would provide a
solution that allows the
spacecraft to maintain a greater distance from the surface of
the asteroid. However it too would
-
7/30/2019 Barry Solomon Scholarly Paper
21/93
add a not insignificant amount of mass to the mission.
Furthermore the MMU introduces
significantly more risk to the sortie. If the unit runs out of
fuel or otherwise becomes inoperable
the astronaut would have no way to maneuver back to the
spacecraft without the spacecraft
moving dangerously close to the surface. For these
considerations and others, this report
concludes that the safest and most efficient method would be for
the astronauts to climb along a
tether connecting the spacecraft to the asteroid. Although climb
is really overstatement, because
all the astronaut would have to do, is tug once and glide along
the tether. In the case of the solid
asteroid, the spacecraft and the anchors would already be linked
by a tether (for power and
communications), so this option would add no extra mass to the
mission. For the case of the soft
asteroid, the spacecraft could be connected, by a low mass
safety tether, to the second ASP
released which remains close to the spacecraft. In either case
the astronaut would hand over hand
pull themselves along the tether from the spacecraft over to the
surface? This system is by far the
safest. It has the lowest probability for any type of failure,
and it requires the smallest physical
footprint which decreases the chance of a debris strike.
There are four possible risks astronauts face as they transfer
between the spacecraft and the
asteroid surface, while on EVA. These risks include failure of
the device enabling the transfer,
failure of the astronaut to adhere to safety guidelines,
incapacitation of the astronaut, and debris
striking the transfer device. A method and technology for
enabling this transfer should be chosen
which provides the most safety and reliability to the astronauts
who will use it.
Power Requirements
The tension rigs which provide tension to the tethers require a
significant amount of energy. The
amount of energy required depends on the configuration being
used, the downforce desired on
the astronaut, and the amount of gearing used in the motors.
Gearing is an interesting tradeoff
because the more gearing the motors have, the heavier they are,
but the less power they require
to generate a particular torque. In Table 1 below, the power
requirements for 9 possible
deployments are shown. These values were calculated using the
methodologies in Appendix
One: B.
Lunar Gravity Martian Gravity Earth Gravity
Configuration Ave
(kW)
Peak(kW) Ave
(kW)
Peak(kW) Ave (kW) Peak(kW)
Line Formation
(10m apart)1.6 3.5 3.3 7 10 21
Triangular area(10m sides)
1.6 4.2 3.6 8.7 10.8 26.1
Circumferential
Ropes (5m
apart)
0.7 1.7 1.4 3.5 4.1 10.7
Table 1: For the 3 setups shown, the power requirements for 3
different simulated gravity environments are given. These
values are for the whole system, not for individual tension
rigs.
-
7/30/2019 Barry Solomon Scholarly Paper
22/93
Solid Asteroid Power Requirements
In this case the power for the tension rigs would come from a
single tether which connects the
first anchor to the spacecraft. Power would then be distributed
from that anchor, through the
tethers, to all of the other anchors on the asteroid
surface.
Soft Asteroid Power RequirementsThe power for tension rigs could
come in one of two ways. For EVAs of a short duration (2
hours or less on the surface), the power for the tension rigs
could be provided by an auxiliary
battery attached to the spacesuit life support system. For
longer EVAs, a tether could be attached
to the spacesuit life support system. The battery system could
certainly be used for longer EVAs,
however the tension rigs use a significant amount of energy, and
the battery pack for surface
stays over 2 hours might become quite cumbersome.
Possible and Proposed alternativesAlthough the study of EVA
mobility options has barely been explored in the scientific
community, a few methods have been proposed. These methods rely
on the use of either a boom,
an astronaut maneuvering unit, or anchors and tethers (different
than those discussed).However,
none of these systems has been explored in any great detail, and
only one of the options (as will
be discussed below) has a peer reviewed article written about
it. The details of these alternative
systems, and a discussion of their strengths and weaknesses is
provided below.
Boom Arm
In 2011 and 2012 NASAs NEEMO project performed simulated
asteroid EVA operations at the
Aquarius undersea research laboratory near Key Largo, Florida.
In these missions, one of thetechniques the astronauts used to
interact with the asteroid was to secure their feet in a boom,
or robotic arm. The boom positioned the astronaut over the
surface, so that they could interact
with the asteroid using their hands. NASA has only just begun
testing this type of system for use
on an asteroid, and it may be a long time before any data or
analysis is released; although one
would assume that this boom system would be something like the
one used on the ISS or the
Shuttle. However there are significant differences in the
environment of the ISS and an asteroid,
and the boom implementation might change considerably.
There are several options available as to who would be operating
the boom. The boom could be
controlled either by the user, by another crewmember, by mission
control, or autonomously.Each of these options has its advantages
and limitations. Currently the protocol is for another
crew member, who is still in the spacecraft, to operate the
robotic arm. This method leaves the
astronaut on EVA free to complete their tasks without having to
worry about operating the boom.
However there is some risk involved in having an operator with
only limited visibility, as an
onboard operator would have. Additionally, the process of the
EVA astronaut describing his
desired movement to the operator could be tedious and slow. This
problem does not exist to a
-
7/30/2019 Barry Solomon Scholarly Paper
23/93
great extent currently because on station for a given task, an
astronaut has very a very specific
place to go on the surface of the station. Conversely at an
asteroid, an astronaut on EVA might
not know exactly where they wanted to go. They might have a
desired spot to explore, but the
spot might not be what they thought it was, and the astronaut
might have to change positions on
the fly. Furthermore due to the significant time delay between
the crew and mission control, the
decision might have to be made by the crew. In this case it
might be difficult for the person on
EVA to coordinate with the boom operator where to move to. To
mitigate this effect, the boom
could be operated primarily by the astronaut on EVA themselves.
This would allow the person
on EVA to have full control of their position with respect to
the asteroid at all times. This
method seems the most efficient, in that the astronaut on the
boom would probably have the best
idea of where they are in relation to the asteroid and where
they want to go. The downside to this
method is that the astronaut would have one or both hands
occupied while traversing, but this is a
small concern because the astronaut would not have to be
interacting with the asteroid while
moving. There is little chance that the boom would be controlled
either by a remote operator on
Earth. The remote earth operator would have a large time delay
(up to 20 seconds), which wouldmake it impractical for them to
control the arm.
One of the problems of the boom is its limited range. If the
Asteroid is significantly small in size,
then its curvature would severely limit the reach of the boom
without the spacecraft having to
maneuver to a new position. Also in the case of some asteroids,
it is believed they could have
large pieces of debris orbiting them, and to avoid such pieces,
a spacecraft might have to stay a
significant distance from the surface. Depending on this
distance, the boom might become
prohibitively voluminous or massive to be the chose mobility
system for the mission.
Another detractor of using a boom system is that the astronaut
does not get to walk on the
asteroid. After traveling for 90 days in a spacecraft to a
distance from earth never before
experienced to a world never before explored, it is conceivable
that an astronaut brought up with
the phrase That's one small step for man; one giant leap for
mankind, would want to create
their own first steps for mankind. The public too will not
understand why after spending tens of
billions of dollars on a NEO exploration mission NASA is unable
to allow their astronauts to
walk on the surface of the Asteroid. The imagery of an Astronaut
on the end of a robotic arm just
within reach of the asteroid body, is nowhere near as impressive
as the image of that same
astronaut with their feet firmly planted in the surface and the
still night of empty space in the
background.
Additionally not only is the imagery and the satisfaction of
standing on the surface greater, but
he utility is greater as well. An astronaut attached to a foot
restraint on the end of a boom must
be within arms reach of the asteroid, and to do so their head
would be very close to the surface.
This means the astronaut would have very low visibility as
compared to the visibility they would
have standing on the surface. The astronaut would also have a
reduced capacity to maneuver to
more favorable positions and locations at will, which would slow
work and frustrate the
astronaut. Also the astronaut might have more trouble adjusting
to the their orientation to the
-
7/30/2019 Barry Solomon Scholarly Paper
24/93
asteroid as it would appear above them or in front of them, and
not under their feet; this could be
disconcerting for a time.
One of the most persuasive advantages of using a boom system is
that the astronaut comes in
minimal contact with the surface of the asteroid. In general
only the astronauts gloves and tools
would make contact with the surface, and this type of contact
would be the same no matter whattype of mobility system is
employed. This is advantageous in that significantly less dust will
be
churned up, than if the astronaut was walking on the surface, or
releasing propellant near the
surface. However the extent to which this is advantageous is
certainly dependent on the asteroid.
Some asteroids may already have significant amounts of dust
floating around them, even without
human interaction. Other asteroids may have very little dust at
all, thus nullifying this advantage.
Although if there is native dust floating above the surface ,
using a boom system, the astronauts
head would be constantly close to the surface of the asteroid
where one would assume the most
dust would be floating about, allowing the astronaut no respite
from the obscuring haze.
Astronaut Maneuvering Unit (AMU)Another alternative would be to
equip an astronaut going on EVA to the asteroid Surface with a
propulsive personal maneuvering system much like the MMU. This
system would consist of a
backpack propulsion device that the astronaut would use to
propel themselves from the
spacecraft to the surface, then around the surface, and finally
back to the spacecraft. The unit
would be operated by the user most likely and would offer the
astronaut a great amount of
freedom in locomotion. However such a system would have many
drawbacks. The system unit
would be limited in maneuvering capacity by the amount of fuel
it carried. The unit would also
carry a high degree of risk to the safety of the user; if the
unit was operated improperly, or
without sufficient caution the operator could collide with the
spacecraft, the asteroid, or worse
find themselves out or reach of return. Although the astronaut
could be connected to the
spacecraft with a safety tether, but this might limit their
mobility. Furthermore the structure of
the unit itself, and its attachment to the spacesuit would
severely hinder the astronauts ability to
interact with the asteroid. With some sophisticated controls
algorithms, and ergonomic design, it
is possible the unit could allow the astronaut to walk on the
surface. However this would require
a significant amount of fuel, and it is likely that the design
would not accommodate that type of
functionality. Without the ability for the astronauts to be able
to walk on the surface of the
asteroid, the mission would suffer the same losses described in
the previous section. The system
would also be prone to churning up dust at high velocities
whenever the exhaust comes into
contact with the surface.
Alternative Anchor systems
Other people have vaguely suggested using anchors or
circumferential ropes to develop an
astronaut mobility system for asteroids. Gertsch and Gertsch
provide six basic methods for attaching anchors
to an asteroid surface [1]:
-
7/30/2019 Barry Solomon Scholarly Paper
25/93
1. Single sling around asteroid.
2. Multiple slings around asteroid.
3. Penetration anchor.
4. Expansion anchor in drilled hole.
5. Friction anchor in drilled hole.
6. Glued (grouted) anchor in drilled hole.
They propose tethers can be attached to these anchors, but there
is not further elaboration on
how the tethers work, nor on how a person might operate while
attached to the tethers.
Furthermore, while anchoring devices have been studied to some
extent for other mission types
(i.e. asteroid sample return missions), there has been little
research conducted on how a system
of anchors providing safety and functionality to astronauts
might be designed. Additionally, there
has been almost no research into the design of a system of
tethers for attaching astronauts to said
anchors. Possibly the only academic paper written on the subject
proposed a system that uses
circumferential ropes to accomplish this task. Garrick and Carr
designed a system which uses
two circumferential ropes as anchors [2]. Astronauts would then
don a large rigid harness which
connects at the waist and attaches to the ropes. The harness has
four controllable telescoping
arms (two on each side) which rise upward from the waist, and
have eyelets on the ends through
which the ropes are threaded. Downforce on the astronaut is
provided by the tension in rope
created by the arms pushing upward on the rope. Additionally the
harness is gimbaled to provide
astronauts the ability to rotate and bend. Their proposed system
would provide a downforce
approximate to lunar gravity.
This system has positive and negative points as well as a few
assumptions that may not be
universally true.
Negatives: The astronaut would be constrained it seems to the
small path created by their
immediate reach multiplied by the circumference of the
astronaut. The astronaut would have
very little ability to move perpendicular to the direction of
the ropes. Conceivably the arms of the
harness could extend and retract significantly to make lateral
movement a possibility, but it
might be difficult to actuate the linear motion of these arms at
the speed an astronaut would
attempt to traverse. Furthermore the more distance you attempt
to put between the ropes, the
longer the arms need to be to make this distance traversable,
increasing the mass of the system.
The author also mentions that it would be impossible to traverse
regions where due to the
asteroid being non-spherical, the ropes were suspended too high
above the surface. Additionally,
the arms of the harness and the circumferential ropes would be
above waist level, and might
obscure the vision and arm/body movements of the astronaut.
Garrick and Carr provide an option where a pair of astronauts
can utilize the system
simultaneously, but it includes the use of a large fulcrum, and
couples the astronauts motion to
one another effectively reducing their independent degrees of
freedom. In this setup, a long
boom would be attached to an astronaut positioned normally in
the system. On one end of the
-
7/30/2019 Barry Solomon Scholarly Paper
26/93
boom another astronaut would attach themselves and on the other
end of the boom a
countervolume would be attached which rolls along the asteroid
surface and keeps the boom
level. This would mean that no matter how the boom was gimbaled,
the position of the central
astronaut would define the explorable envelope of the second
astronaut. Additionally, any time
this boom was at the end of its range of motion, an attempt by
one the astronauts to move further
outside this envelope would directly torque the second
astronaut. Furthermore this secondary
setup has greatly increased the mass of the system (because of
the boom and the countervolume),
and has increased the amount of dust churned up (because of the
countervolume).
The authors also suggest a third mode of operation where the
astronaut is parallel to the surface,
and the length of the harness arms would determine the distance
between the astronaut and the
surface. However in this setup the eyelets are dragging on the
surface, and the astronaut would
have to drag themselves along the surface to change positions.
Additionally the harness would
have no way of maintaining a tension in the ropes anymore, which
would make it more difficult
for the astronaut to interact with the surface.
Positives: The system does provide the ability for the astronaut
to traverse through terrain of
various heights, through the lengthening and shortening of the
arms. However the degree to
which the system can compensate for large slopes is again
dependent on the range of the arms
and the speed at which they can change length.
Assumptions: The authors assume that the ropes will not cut
through the regolith, which may not
always be the case. To derive this assumption, the authors
calculate the pressure of the ropes on
the surface to be 42 N/m2 , which the authors assume is very
low. However it is conceivable that
there could be an asteroid whose cohesion is not strong enough
to withstand a pressure of such
magnitude. Furthermore to obtain this number the authors assumed
an asteroid of 3 km indiameter, which is most likely very
unreasonable. The greater likelihood, as was described
earlier, is that the first asteroids to be visited by humans
will be at most a couple hundred meters
in diameter and more likely they will be under 100 meters. Given
an asteroid of radius 60m
(which is much more representative of the field of possible
destinations), the pressure exerted by
the ropes on the surface to produce the same downforce would be
about 2400 N/m2.
Additionally, this is just an average pressure assuming the
tension in the rope is evenly applied
around the circumference of the asteroid which it would not be.
This calculation also does not
account for the dynamic loads caused by astronaut movement or
tool use. In all likelihood the
maximum pressure the ropes apply to the surface could be 10
times greater or 24 kN/m2 , which
could easily be greater than the cohesive forces of some
asteroids.
In addition to the MIT proposal just described, NASA has
recently tested a system of
anchors/tethers for asteroid exploration. The tests were
conducted three times over the last two
years as part of the NEEMO project performed at the Aquarius
undersea research laboratory near
Key Largo, Florida [3]. The system of tethers tested by NASA
while not described in full detail,
but it seemed to be very simple. In it there is a central hub
which stores six retractable tethers the
-
7/30/2019 Barry Solomon Scholarly Paper
27/93
tethers would then be attached to various other anchor points on
the surface, and the astronaut
would clip themselves a single tether they wished to traverse
along. The Astronaut would then
move themselves by pushing off the surface and/or by pulling on
the tether. It is unclear why
these tests are being tested in open water where uncontrollable
environmental factors seemed to
be having a significant impact. Motion of the water, as well as
vision obscuring particles seemed
to be having a negative effect on the utility of such tests.
Hopefully further testing will encourage
the development of more robust methodologies and
technologies.
Mission with no EVA
It has also been proposed that the mission could be accomplished
without an EVA. In that
scenario, the astronauts would explore the asteroid surface from
within either the main spacecraft
or a secondary smaller spacecraft, using robotic arms and tools.
This method seems as though it
might provide the greatest risk, and the least reward. The risk
comes from the fact that the main
spacecraft would have to spend a great deal of time in very
close proximity to the surface. This
would make the spacecraft highly susceptible to accidental
contact with the asteroid or to
damage from orbiting debris. Furthermore, it might place a
mental strain on the astronauts to
travel for 90 days without being able to get out at their
destination. Additionally exploration
tasks would probably be performed very slowly to ensure that the
robotic arms interact safely
with the asteroid. This would mean less science could be
accomplished. However this system
would have the advantage of not requiring the deployment of any
secondary hardware such as
anchors.
Downside to Anchors
If the material type of the asteroid is unknown when the journey
begins, then anchor may not be
a good option. There is some chance that if the material
properties of the asteroid are too
unknown, then both the schemes for solid and soft asteroids
discussed herein might not function
as desired. For solid asteroids, it is possible the anchor
harpoons might not penetrate or remain
embedded in the asteroid. For the soft asteroid, it is possible
the circumferential ropes and the
ASPs might sink into the asteroid, and render the system
ineffective. Therefore if the material
properties of the asteroid are still unknown at the time of the
mission, this report recommends
that the boom be utilized for astronaut EVA mobility.
Comparison of alternativesThe most compelling reason though to
pick one mobility system over another might be mass, or
a combination of mass and ability to complete mission
objectives. For this analysis, a metriccalled mass specific area of
exploration is created. This metric assumes that the number of
mission objectives completed is dependent on how much area can
be explored. The metric
relates how much mass it takes to explore a given unit of area.
To calculate this, it was assumed
that 12 days are spent exploring the surface. A full description
of this calculation can be found
in Appendix One: D, and the results are shown in Table 2 below.
Based on this calculation using
the harpoon anchors developed in this report are the most
economical choice for mobility
-
7/30/2019 Barry Solomon Scholarly Paper
28/93
system, when exploring a solid asteroid. For Exploration of a
soft asteroid, the circumferential
tether system developed in this report is the best choice based
on these calculations. If however
the alternate metric of Mass Specific Unique Area of Exploration
is used, then the boom system
becomes the best choice. The choice of which metric to use is
dependent on the mission objects.
Furthermore, the results of this analysis may change
dramatically based on the specific details of
an actual mission. Although every attempt was made to estimate
values that are representative of
a likely mission.
Boom AMUCirc
Ropes
Harpoon
Anchors
Circ
Tethers
Time (hr) Hours/Day of Exploration 6 14 18 18 18
Area (m^2)Explorable/day 940 500 360 2000 1080
Unique Area Over 12 days 11280 6000 620 6200 1860
Power (kW) Ave. Consumption 2 0.1 0 3 0.7
Mass (kg) Total Extra Mission Mass 6905 8066 9884 4452 5704
Mass Specific Area of Exploration 1.63 0.74 0.44 5.39 2.27
Mass Specific Unique Area of Exploration 1.63 0.74 0.06 1.39
0.33Table 2: Mass Specific Area of Exploration is the area explored
per day multiplied by the number of days of exploration,
divided by the mission mass due to the implementation of the
mobility system. Also shown is the Mass Specific Unique Area
of Exploration, which is calculated using unique area covered
instead of area explored each day.
Other Items to discuss
Emergency Astronaut Retrieval
Safety is very important to any human exploration technology,
and was a central focus of this
design. This mobility system has been designed so that even if
an astronaut becomes
incapacitated, they can be returned to the spacecraft to receive
aid. In this system, the astronaut is
always connected to the main spacecraft. In the solid asteroid
system, the first anchor is tethered
to the space craft, which is tethered to the other anchors next
to it, and ultimately all the anchors
are connected to one another and therefore the spacecraft. An
astronaut while on EVA, is always
connected to this system of anchors. If for any reason an
astronaut is unable to return to the space
craft, or is having a medical emergency, the space craft can
reel in the system of anchors, and
return the astronaut to the vicinity of the spacecraft where
they can be brought inside for medical
attention.
To reel in the system of anchors, the anchors have to be first
separated from their connection to
the surface. This is done by firing an explosive bolt or other
release mechanism that separates the
upper anchor structure from the anchor base. Once all the upper
anchor structures have separated
from their bases, they all reel in their tethers, and the
spacecraft reels in the tether which
connects it to the first anchor. Thus the astronaut is returned
to the vicinity of the spacecraft. The
-
7/30/2019 Barry Solomon Scholarly Paper
29/93
SCR can be remotely unclasped to release the astronaut from the
chain of anchors. After that, the
astronaut can be retrieved by a robotic arm or by another
astronaut.
Likewise in the soft asteroid version of the technology, the
astronaut is connected to the main
spacecraft directly by a tether which can be reeled in by the
spacecraft. If the astronaut becomes
immobilized and needs to retrieved, the SCR can be remotely
unclasped which frees theastronaut from the mobility system and
allows them to be reeled into the vicinity of the
spacecraft where then can be brought inside.
Locomotion in the System
Humans evolved their bodies and their locomotive mechanics to
function in 1g. When moved
outside of a tradition earth gravitational environment, those
standard mechanics of locomotion
may not function as efficiently as they did in 1g. In the lunar
gravity environment, it has been
postulated that loping may be the most efficient form of
locomotion for humans [4]. In addition
to the gravity environment, the spacesuit worn by astronauts
during EVA can also have
significant effect on how they ambulate. Understanding how the
downforce level applied to anastronaut by the mobility system
effects walking is key to the proper development of this
mobility system. The design driver of this study is to create a
system which provides the most
utility to the mission for the lease amount of mass. Previously
this study discussed how this goal
could be met in terms of explorable area, and anchor design, but
astronaut usability is of equal
importance. Astronaut usability manifests itself through two
criterion, comfort and energy
expenditure. Both of these factors intimately affect overall
system utility. The more
uncomfortable an astronaut is while using the system, the less
effective they will be in
performing their duties. Furthermore the more energy the
astronaut uses to ambulate at a given
rate within the system, the less time they will be able use the
system before they have to return to
the spacecraft for rest and nourishment5. Therefore optimizing
the system to account for these
concerns is quite necessary. The main ways in which these
factors can be affected are in
choosing of the gravity replacement load, and in the design of
the spacesuit. The gravity
replacement load will have a serious effect on the kinematics of
locomotion. It will also
determine how much force is put on the body through the
spacesuit, which is a factor in comfort.
The space suit design itself is important in that it determines
how the tensions in the tethers will
be transmitted to the body of the astronaut, which in turn
affects comfort, muscle fatigue and
locomotion. Additionally the spacesuit will also have a kinetic
impact on locomotion as
described by [5]. Thus it would be very important to study how
humans walk when utilizing
mobility system such as the one described. This research would
help determine which downforcewould be the most beneficial to the
mission. In an effort to begin this testing, an experiment was
done to study unsuited locomotion at 5 downforce levels and the
results are presented in Part
Two of this report.
5The astronaut might also need to return if one particular
muscle becomes too fatigued, before their body as a whole
becomes fatigued.
-
7/30/2019 Barry Solomon Scholarly Paper
30/93
Additionally, testing should be conducted over a range or
inclines declines, and terrain
topographies. It was found during the Apollo missions that
inclination, and terrain roughness had
a significant impact on the metabolic rate of astronauts on EVA
[6]. If the terrain of the asteroid
to be visited is well known in advance, then the mobility system
can factor this into its
optimization. Keeping this in mind, it might be advantageous to
make the loading on the
astronaut dynamic depending on the terrain conditions. For
example the SLS could decrease the
load as the astronaut moved up a hill, if this was found to make
walking easier.
Further Study Required
The three biggest areas that need to be studied further to
implement this design are:
1. How humans wearing a pressurized space suit would walk using
the system described
herein for any given downforce. Studying this will decide what
the most economical
downforce is.2. The creation of a control scheme which will
enable the tension rigs to function as
described.
3. The design and testing of a harpoon system that will
withstand the forces likely from this
configuration.
-
7/30/2019 Barry Solomon Scholarly Paper
31/93
Appendix One
A - Harpoon Anchor System for Solid Asteroids a Detailed
Description
Hardware overview
The harpoon and its launch mechanism designed for this system
are conceptually very similar tothat of the Rosetta spacecraft [7].
The harpoon inside of its launch tube is pictured in Figure 9
below. The hardware inside of the launch tube is used to
accelerate the harpoon and jettison it
into the surface. At the very rear of the tube is the electrical
igniter, and the space where the solid
fuel goes around the igniter. Following that is a combustion
chamber which would be covered
with a damning foil. On the other side of the damning foil is a
nozzle that accelerates the
combustion gas. A position is glued into the end of the nozzle,
and the harpoon is nestled into
the other end of the piston. The harpoon is secured at the front
by two shear rods which lock into
the launch tube. Inside the harpoon is a spring and the point
where the cable is attached. This
cable attach point can slide up and down the tube. The point of
the spring is to allow the cable
reel to create a high tension between the anchor and the surface
after landing.
Figure 9: A depiction of the harpoon in its launch tube.
Exhaust valves
Mounting holesIgniter Leads
Shear rod
Penetrating head
BarbsHarpoon Body
SpringCable attach point
Piston Nozzle Combustion chamber
Igniter
-
7/30/2019 Barry Solomon Scholarly Paper
32/93
Launch Process
Once the fuel is ignited it begins to turn into a gas. As gas is
created, the pressure builds up in the
combustion chamber. Once the pressure is high enough to sustain
the reaction, the gas pushes
through the damning foil into the release chamber. Here pressure
builds up again until it reaches
its peak. The adhesive which connects the piston to the release
chamber is formulated to break at
this peak pressure which allows the gas to begin pushing the
piston forward. This motion also
breaks the weak shear rods which had previously helped keep the
harpoon centered and in place.
The piston propelled by the gas shoots forward pushing the
harpoon in front of it. The end of the
launch tube is tapered, and when the piston reaches the taper it
deforms and is permanently
lodged in the front of the tube. The harpoon is now free to
enter the surface of the asteroid.
Simultaneous to the release of the harpoon, valves at the rear
of the launch tube open which
allow the gas trapped in the tube to exit trough two nozzles in
the rear. The release of gas is used
to help counteract the motion of the anchor in reaction to the
release of the harpoon 6.
The harpoon is attached to the anchor via a cable. This harpoon
cable is spooled around its own
harpoon cable reel. The reel is attached to the bottom of the
stationary anchor base and is
positioned at the center of the anchor. As the harpoon travels
toward the asteroid, the cable reel
runs in reverse to minimize the drag of the cable coming off the
real. Once the harpoon reaches
the asteroid, it loses all of its kinetic energy penetrating
into the surface. An accelerometer in the
harpoon senses that the harpoon is no longer moving, and the
reel begins to wind the cable back
in7. The reel would continue winding until all of the feet make
contact with the surface
8. The legs
of the anchor would have a suspension system built in to absorb
the acceleration of the anchor
caused by the reeling.
Cable Reel
The reel has been designed much like a level wind fishing reel.
The main feature of which is a
guide on the front of the reel helps wind its cable evenly back
onto the spool of the reel. The
guide moves back and forth parallel to the axis of the spool,
and its motion is controlled through
gearing by the spin of the spool so that it evenly
distributes/unwinds cable along the length of the
spool. This feature ensures that the cable does not snag while
being released or while being
rewound. The most important way in which these reels differ from
level wind fishing reels is
that they are powered. The reels have the ability to turn
themselves in the unwind direction,
which does not actually feed cable off of the spool, but it does
ensure that the momentum of the
harpoon is not transferred to the anchor, which would accelerate
it toward the surface.
6If the anchor is the variety without propulsion then the rest
of the reaction force is counteracted by the main
spacecraft RCS. If the anchor has its own propulsion then the
anchor RCS counteracts the remainder of the reaction
force.7
If the anchor is the variety without propulsion then the anchor
is released from the main spacecraft before it begins
reeling itself in.8
Due to the spin of the asteroid and to local surface
variability, the three feet may not reach the surface
simultaneously.
-
7/30/2019 Barry Solomon Scholarly Paper
33/93
Additionally the motor in the reel enables the reel to wind the
cable back in, which is its primary
function. The reel also has a break which is used to make sure
the spools do not s