Embed Size (px)
Citation preview

20
BAB III
METODE PENELITIAN DAN PERANCANGAN SISTEM
3.1 Metode Penelitian
Metode yang digunakan pada penelitian ini adalah cara mengendalikan
kondisi air pada tangki hidroponik pada waktu tertentu, seperti misalnya pada saat
pengecekan ketinggian air tiap waktu pada tangki hidroponik, dan penggantian air
pada tangki.
Untuk mengatur saat pergantian air, Solenoid valve digunakan sebagai
pintu masuk air ke tangki hidroponik yang dikendalikan dengan modul relay
untuk saat membuka valve dan saat menutup valve. Pada saat pengisian air,
ketinggian air awasi melalui sensor ketinggian air. Untuk memberikan pewaktuan
yang sesuai, RTC1307 digunakan dalam proses pengawasan air pada tangki
hidroponik. Serta penggunaan LCD sebagai tampilan ketinggian air.

21
3.2 Rancangan Sistem
Berikut merupakan gambar Blok Diagram pada sistem yang akan dibuat,
ditunjukkan pada Gambar 3.1 :
Gambar 3.1 Blok Diagram
Dari gambar Blok Diagram tersebut terdapat beberapa input dan output
yang digunakan antara lain :
a. Input (Sensor)
1. Sensor Kapasitif : Digunakan untuk mendeteksi ketinggian air
yang digunakan untuk mengetahui keadaan
ketinggian air.
2. RTC DS1307 : Digunakan sebagai timer untuk waktu
pergantian air pada tangki hidroponik.
b. Output (Aktuator)
1. LCD : Digunakan untuk menampilkan informasi
volume air.
Arduino Mega
2560
Sensor Kapasitif
Solenoid Valve
LCD
RTC DS1307 Modul Relay

22
2. Solenoid Valve : Digunakan sebagai pengendali aliran air yang
keluar dari tangki hidroponik dan pengendali
air masuk ke tangki hidroponik
3.3 Perancangan Mekanik Alat
Dalam pembuatan mekanik pada tugas akhir ini dibuat tangki untuk
tanaman hidroponik. Tangki ini berfungsi untuk menampung air nutrisi untuk
tanaman hidroponik.
Pada tangki ini terdapat pipa sebagai jalan masuk dan jalan keluarnya,
solenoid valve sebagai pintu masuk dan pintu keluar air, sensor ketinggian air
yang digunakan untuk mengetahui ketinggian air. Berikut perancangan alat dapat
dilihat pada Gambar 3.2.
Berikut adalah detail mengenai bahan-bahan dari tangki hidroponik:
1. Bak penampung air berbahan plastik.
2. Tatakan pot berbahan gabus.
3. Pot tanaman hidroponik berbahan plastik.
4. Media tanam berbahan roughwool.
5. Rangka penyangga berbahan almunium.
6. Pipa PVC berukuran ½.
7. Solenoid Valve
8. Power Supply 24 volt.
9. Kotak elektro berbahan plastik.

23
Gambar 3.2 Tampilan Keseluruhan Alat
24
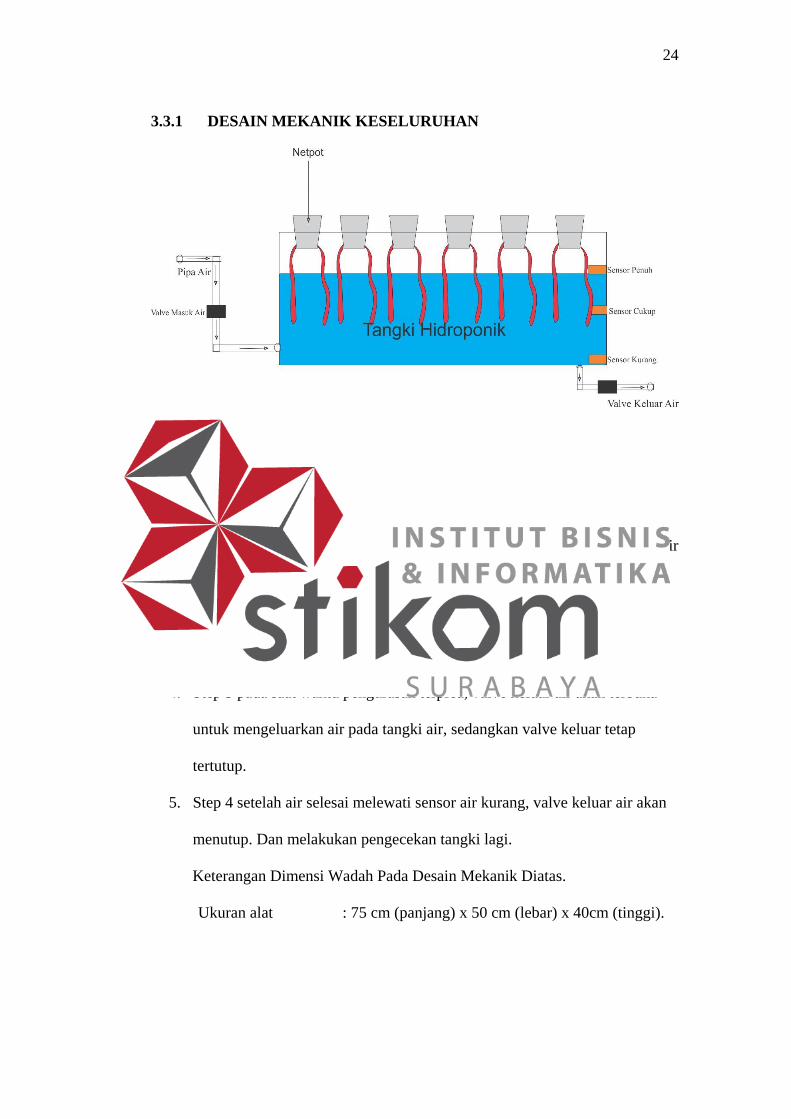
3.3.1 DESAIN MEKANIK KESELURUHAN
Gambar 3.3 Desain Mekanik
Pada Gambar 3.3. Desain mekanik alat dapat dijelaskan sebagai berikut
2. Step 1 dilakukan pengecekan tangki, apabila tangki air kosong, maka
pengisian air dimulai dengan membuka valve masuk air untuk menerima air
dari tandon, sedangkan valve keluar air tetap tertutup.
3. Step 2 air pada tangki menyentuh sensor Penuh, valve masuk air akan
menutup, dan valve keluar air juga akan menutup.
4. Step 3 pada saat waktu pengurasan terpicu, valve keluar air akan terbuka
untuk mengeluarkan air pada tangki air, sedangkan valve keluar tetap
tertutup.
5. Step 4 setelah air selesai melewati sensor air kurang, valve keluar air akan
menutup. Dan melakukan pengecekan tangki lagi.
Keterangan Dimensi Wadah Pada Desain Mekanik Diatas.
Ukuran alat : 75 cm (panjang) x 50 cm (lebar) x 40cm (tinggi).
25
Bak Air(2 buah) : 70.5 cm (panjang) x 24 cm (lebar) x 20.1 cm
(tinggi)
Kotak Elektro (2 buah): 18 cm (panjang) x 11 (cm lebar) x 6.5 cm (tinggi)
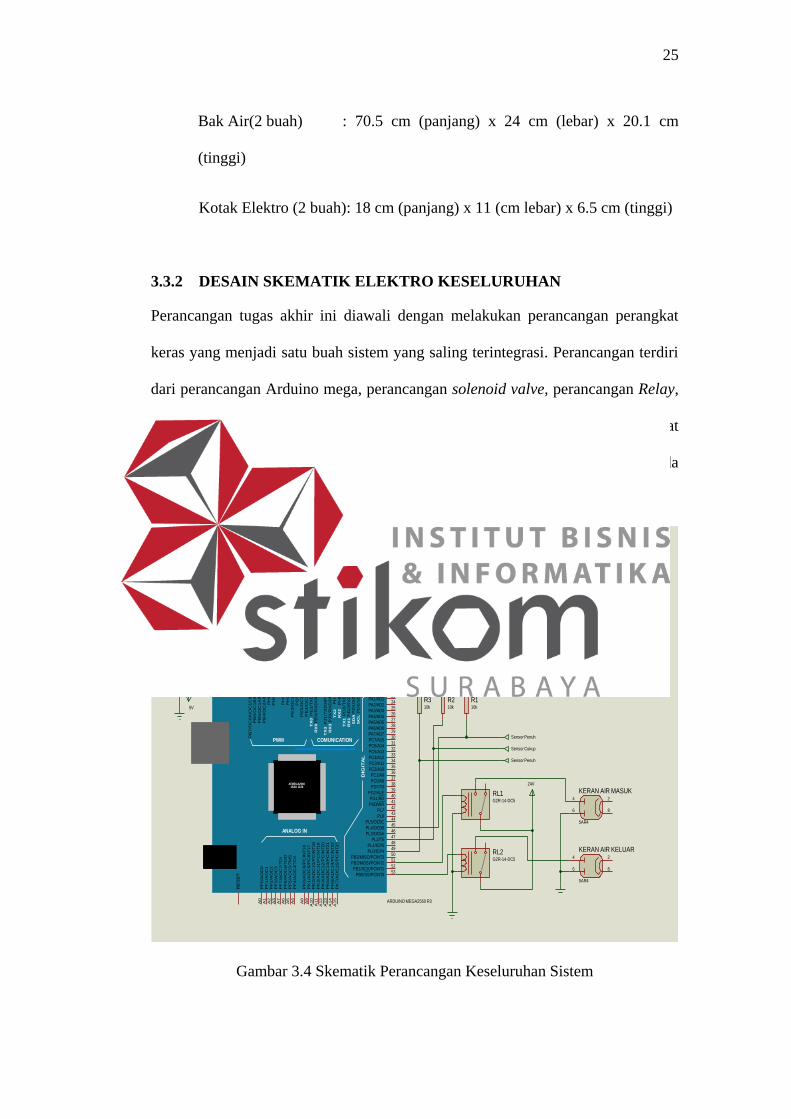
3.3.2 DESAIN SKEMATIK ELEKTRO KESELURUHAN
Perancangan tugas akhir ini diawali dengan melakukan perancangan perangkat
keras yang menjadi satu buah sistem yang saling terintegrasi. Perancangan terdiri
dari perancangan Arduino mega, perancangan solenoid valve, perancangan Relay,
perancangan RTC1307, perancangan sensor kapasitif. Pada Gambar 3.4 dapat
dilihat Schematic perancangan seluruh kontrol kondisi air secara otomatis pada
tanaman hidroponik.
Gambar 3.4 Skematik Perancangan Keseluruhan Sistem
PWM COMUNICATION
DIG
ITA
L
ANALOG IN
ATMEGA256016AU 1126
microcontrolandos.blogspot.com
TX
0
TX
3
TX
2
TX
1
SD
A
SC
L
RX
0
RX
3
RX
2
RX
1
PD
0/S
CL
/IN
T0
21
PD
1/S
DA
/IN
T1
20
PD
2/R
XD
1/I
NT2
19
PD
3/T
XD
1/I
NT3
18
PH
0/R
XD
217
PH
1/T
XD
216
PJ0
/RX
D3
/PC
INT9
15
PJ1
/TX
D3
/PC
INT10
14
PE
0/R
XD
0/P
CIN
T8
0P
E1
/TX
D0
/PD
O1
PE
4/O
C3
B/I
NT4
2P
E5
/OC
3C
/IN
T5
3P
G5
/OC
0B
4P
E3
/OC
3A
/AIN
15
PH
3/O
C4A
6P
H4
/OC
4B
7
PH
5/O
C4C
8P
H6
/OC
2B
9P
B4
/OC
2A
/PC
INT4
10
PB
5/O
C1
A/P
CIN
T5
11
PB
6/O
C1
B/P
CIN
T6
12
PB
7/O
C0
A/O
C1
C/P
CIN
T7
13
AR
EF
PA0/AD022
PA1/AD123
PA2/AD224
PA3/AD325
PA4/AD426
PA5/AD527
PA6/AD628
PA7/AD729
PC6/A1431
PC5/A1332
PC4/A1233
PC3/A1134
PC2/A1035
PC1/A936
PC0/A837
PD7/T038
PG2/ALE39
PG1/RD40
PG0/WR41
PL742
PL643
PL5/OC5C44
PL4/OC5B45
PL3/OC5A46
PL2/T547
PL1/ICP548
PL0/ICP449
PB3/MISO/PCINT350
PB2/MOSI/PCINT251
PB1/SCK/PCINT152
PB0/SS/PCINT053
PK
7/A
DC
15
/PC
INT23
A15
PK
6/A
DC
14
/PC
INT22
A14
PK
5/A
DC
13
/PC
INT21
A13
PK
4/A
DC
12
/PC
INT20
A12
PK
3/A
DC
11
/PC
INT19
A11
PK
2/A
DC
10
/PC
INT18
A10
PK
1/A
DC
9/P
CIN
T17
A9
PK
0/A
DC
8/P
CIN
T16
A8
PF
7/A
DC
7/T
DI
A7
PF
6/A
DC
6/T
DO
A6
PF
5/A
DC
5/T
MS
A5
PF
4/A
DC
4/T
CK
A4
PF
3/A
DC
3A
3P
F2
/AD
C2
A2
PF
1/A
DC
1A
1P
F0
/AD
C0
A0
RE
SE
T
PC7/A1530
DUINO1
ARDUINO MEGA2560 R3
6 8
24
KERAN AIR MASUK
5AR4
6 8
24
KERAN AIR KELUAR
5AR4
RL1G2R-14-DC5
RL2G2R-14-DC5
D7
14
D6
13
D5
12
D4
11
D3
10
D2
9D
18
D0
7
E6
RW
5R
S4
VS
S1
VD
D2
VE
E3
LCD1LM016L
SCL14
SDA15
INT13
A01
A12
A23
P04
P15
P26
P37
P49
P510
P611
P712
U1
PCF8574A
24V
5V
R110k
R210k
R310k
Sensor Penuh
Sensor Cukup
Sensor Penuh
5V
RV1
10K
VB
AT
3
X1
1
X2
2
SC
L6
SD
A5
SO
UT
7
U2DS1307
X1
CRYSTAL

26
3.4 Prosedur Evaluasi
3.4.1 Desain dan Uji Coba
Desain dari sistem yang akan di rancang tidak lepas dari studi literatur
yang didapat baik dari buku, internet, maupun konsultasi terhadap dosen
pembimbing. Uji coba akan menggunakan beberapa miniatur wadah-wadah
kosong.
3.4.2 Evaluasi
Evaluasi berisi uraian tentang proses posisi air dan kontrol air pada tangki
hidroponik secara otomatis.
1. Sistem dapat mengetahui posisi level air.
2. Sistem dapat mengetahui merespon saat air pada tangki
hidroponik dikurangi secara manual.
3.4.3 Bagian Komponen Alat
Gambar 3.5 Bagian Komponen Alat

27
3. Valve masuk air dari penampung nutrisi
4. Pot tanaman.
5. Tempat pot tanaman yang berfungsi menahan pot.
6. Tangki hidroponik yang berfungsi untuk menampung cairan nutrisi. Pada
tangki ini terdapat sensor kapasitif yang berfungsi untuk mengetahui kondisi
level air.
7. Valve keluar air yang berfungsi untuk menahan air dan berfungsi sebagia
pintu keluar.
8. Kotak elektro yang berfungsi untuk melindungi komponen elektro yang
diletakkan didalamnya. Didalam wadah tersebut terdapat komponen:
a. Mikrokontroler Arduino Mega yang berfungsi sebagai pengontrol.
b. RTC1307 yang berfungsi sebagai pewaktu.
c. Rangkaian driver relay sebagai driver untuk solenoid valve.
d. LCD 16x2
e. LCD I2C backpack
9. Kotak elektro yang melindungi power supply.
3.4.4 Ukuran Dimensi Alat
Setelah semua komponen tambahan dari penelitian ini dipasangkan ukuran
dimensi dari alat:
Ukuran alat : 75 cm (panjang) x 50 cm (lebar) x 40cm (tinggi).
Bak Air(2 buah) : 70.5 cm (panjang) x 24 cm (lebar) x 20.1 cm
(tinggi)
Kotak Elektro (2 buah): 18 cm (panjang) x 11 (cm lebar) x 6.5 cm (tinggi)
28
3.4.5 Struktur Material Alat
Bahan material yang digunakan dalam penelitian ini menggunakan
beberapa bahan diantaranya sebagai berikut :
b. Bagian rangka:
1. Aluminium
2. Mur dan baut.
3. Bak Plastik
c. Bagian dari penggerak alat
1. Solenoid Valve 24 volt
3.5 Pembuatan Perangkat Keras
3.5.1 Perancangan Microkontroler Arduino
Pada tugas akhir ini dibuat beberapa buah pengendali menggunakan
mikrokontroler keluaran pada perangkat lunak IDE Arduino 1.6.6, yaitu Arduino
mega. Untuk menjalankan mikrokontroler ini diperlukan catu daya 5 volt sebagai
tegangan circuit.
Arduino Mega ini dirancang untuk microkontroler ATMega328. Berikut
ini adalah gambar microkontroler arduino mega, dapat dilihat pada Gambar 3.6.

29
Gambar 3.6 Rangkaian Board Arduino Mega
Arduino mega dapat diaktifkan melalui koneksi USB atau dengan catu
daya eksternal. Sumber daya dipilih secara otomatis. Eksternal (non-USB) dapat
di ambil baik berasal dari AC ke adaptor DC atau baterai. Adaptor ini dapat
dihubungkan dengan mencolokkan plug jack pusat-positif ukuran 2.1mm
konektor power. Ujung kepala dari baterai dapat dimasukkan kedalam ground dan
Vin pin header dari konektor power. Kisaran kebutuhan daya yang disarankan
untuk board arduino mega adalah 7 sampai dengan 12 volt, jika diberi daya
kurang dari 7 volt kemungkinan pin 5volt. Arduino Mega dapat beroperasi tetapi
tidak stabil kemudian jika diberi daya lebih dari 12volt, regulator tegangan bisa
panas dan dapat merusak board arduino mega. Berikut adalah konfigurasi pin I/O
yang digunakan pada Tabel 3.1.

30
Tabel 3.1 Konfigurasi pin I/O pada mikrokontroler
Pin I/O Fungsi
Vcc Power 5 volt
Port COM 20 LCD I2C & RTC1307
Port COM 21 LCD I2C & RTC1307
Port Digital 22 Sensor air penuh
Port Digital 24 Sensor air setengah
Port Digital 26 Sensor air kurang
Port Digital 51 Solenoid Masuk
Port Digital 53 Solenoid Keluar
3.5.2 Rangkaian Sensor Kapasitif
Rangkaian ini dibuat berdasar rangkaian resistor pull-up yang dirangkai
sedemikian rupa sehingga dapat digunakan sebagai sensor ketinggian air yang
kemudian output dari rangkaian tersebut digunakan sebagai pemicu, seperti pada
Gambar 3.7.

31
Gambar 3.7 Skematik Perancangan Rangkaian Sensor Kapasitif
3.5.3 Perancangan LCD (Liquid Crystal Display)
Pada perancangan LCD juga diletakkan di atas box yang telah dibuat.
Tujuan LCD diletakkan di dalam box untuk memudahkan pengguna melihat
informasi yang ditampilkan LCD sesuai dengan program yang diinginkan.
Sedangkan komponen I2C LCD diletakkan di dalam box, sama dengan
mikrokontroler-mikrokontroler yang digunakan pada perancangan. Tujuan LCD
dan I2C LCD diletakkan pada box agar pengaturan komponen lebih rapi dan tidak
membutuhkan kabel panjang. Rancangan elektronika ditunjukkan pada Gambar
3.8.

32
Gambar 3.8 Skematik Perancangan LCD (Liquid Crystal Display)
3.6 Perancangan Rangkaian Solenoid Valve
Pada alat ini juga digunakan Solenoid Valve digunakan sebagai pintu
masuk air ke tangki hidroponik yang dikendalikan dengan modul relay untuk saat
membuka valve dan saat menutup valve.
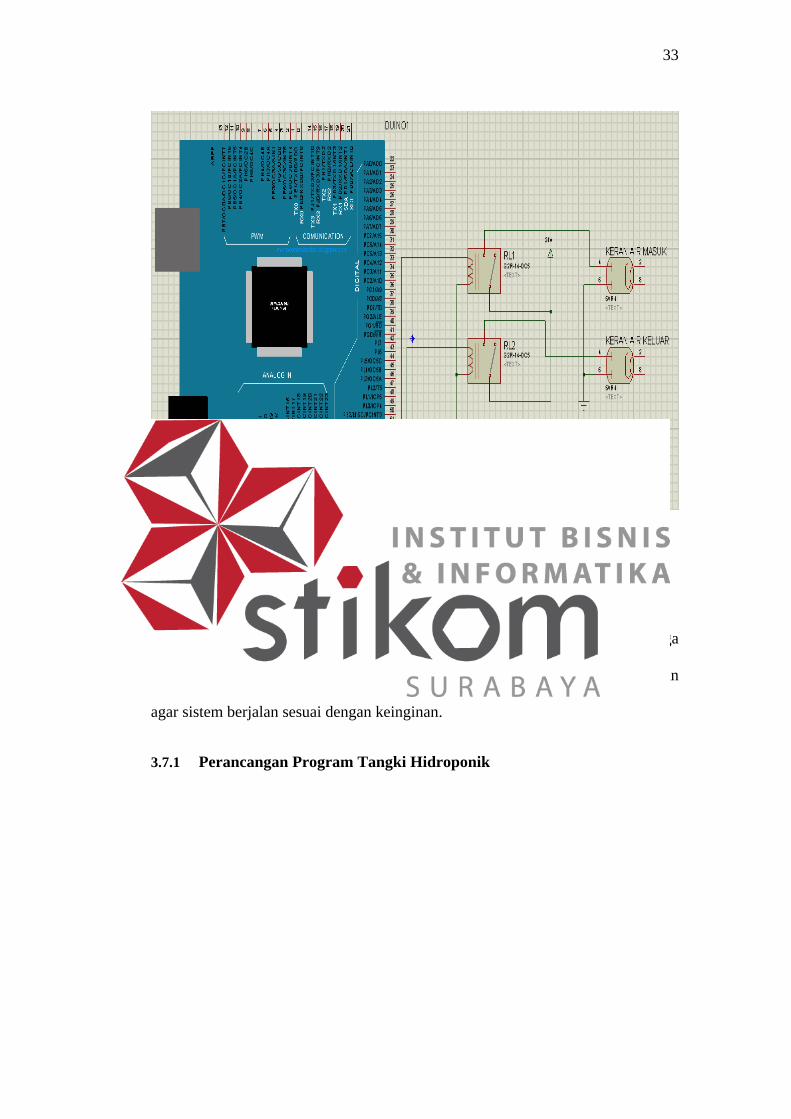
33
Gambar 3.9 Skematik Perancangan Solenoid Valve
3.7 Perancangan Perangkat Lunak
Selain perancangan perangkat keras (hardware), dibutuhkan juga
perancangan perangkat lunak (software). Perancangan ini dilakukan dengan tujuan
agar sistem berjalan sesuai dengan keinginan.
3.7.1 Perancangan Program Tangki Hidroponik
34
Start
Deklarasi
Variabel
Tangki
Kosong?
Cek waktu
pengurasan
Tidak
Buka
Valve_Masuk
Sensor_Penuh
Tidak Terpicu?
Tutup
Valve_Masuk
Buka
Valve_Keluar
Sensor_Kurang
Terpicu?
Tidak
Tutup
Valve_Keluar
Ya
Ya
Tidak
Ya
Ya
Tidak
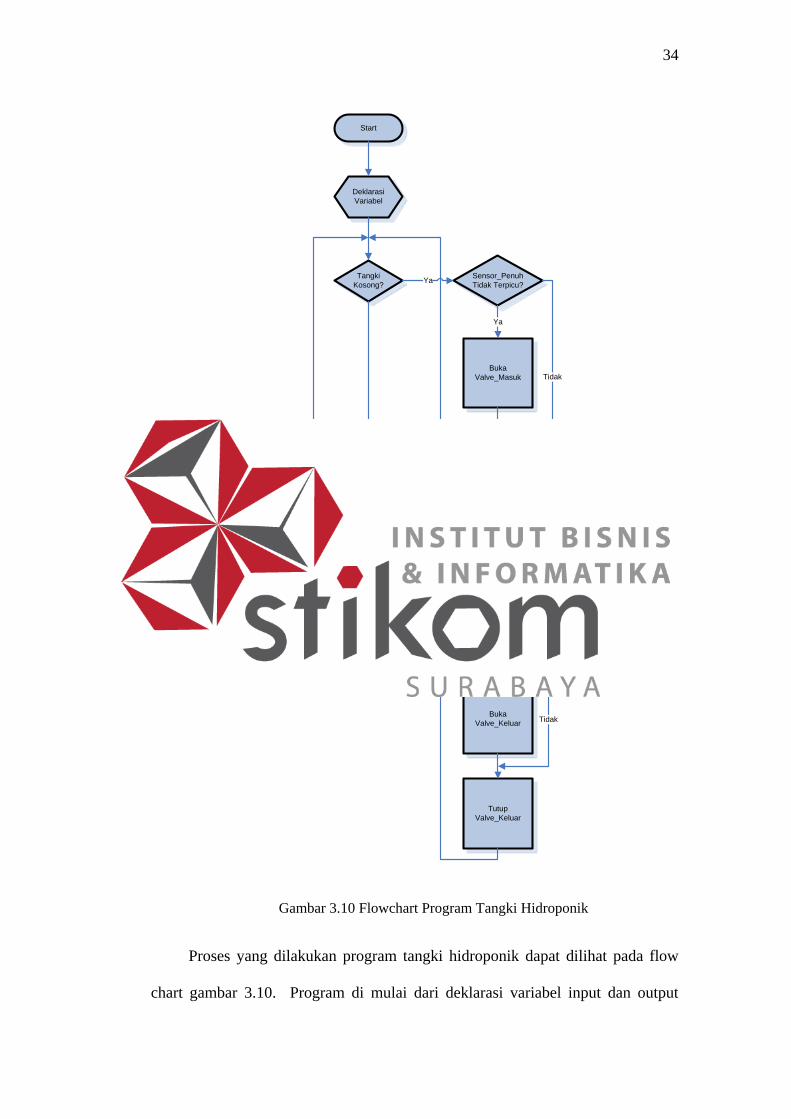
Gambar 3.10 Flowchart Program Tangki Hidroponik
Proses yang dilakukan program tangki hidroponik dapat dilihat pada flow
chart gambar 3.10. Program di mulai dari deklarasi variabel input dan output

35
yang digunakan. Kemudian pengecekan bak dilakukan. Ketika bak tidak kosong,
maka cek pengurasan akan dilakukan. Jika bak kosong, pengisian akan dilakukan.
Pada saat pengisian bak, mikrokontroler akan menunggu input dari sensor yang
terpasang pada bak. Ketika air pada bak belum menjangkau titik maksimum dari
sensor, proses pengisian akan terus berlanjut. Jika air pada bak telah menjangkau
titik maksimum pada sensor, maka proses pengisian akan berakhir dan beralih
pada tahap selanjutnya. Setelah dua minggu dari waktu setting akan dilakukan
pengurasan.. Ketika masih belum memenuhi waktu yang telah ditentukan, proses
akan berlanjut ke pengecekan bak. Jika sudah mencapai waktunya, maka
pengurasan akan dilakukan. Setelah proses pengurasan selesai dilakukan, proses
dilanjutkan kembali pada tahap pengecekan bak.