Embed Size (px)
Citation preview
1. INTRODUZIONE
L’ automobile è indubbiamente una delleinnovazioni tecnologiche che hanno
cambiato il mondo. Nonostante abbia oltreun secolo, molte case automobilistiche han-no festeggiato questo traguardo negli ultimianni (la FIAT ad esempio, nel 1999), è tutt’al-tro che una tecnologia matura. Anche il mer-cato, a dispetto delle apparenze, ha ancoraenormi opportunità di crescita. L’auto, infatti, è un bene del quale può godereoggi soltanto il 12% della popolazione mon-diale. Il mercato dell’auto continua a crescereal ritmo del 2% medio annuo, per raggiunge-re, si prevede, una dimensione tra i 60 e 70 Mi-lioni di veicoli prodotti annualmente nel 2010.Questo se non avvengono improvvise accele-razioni del mercato in Paesi come la Cina chepotrebbero stravolgere tutte le previsioni.Ma insieme al mercato sta crescendo, in mo-do molto più rapido, la competitività tra leaziende automobilistiche. Competitività chesi gioca sui prezzi, sulla varietà di offerta dimodelli e sulla disponibilità di nuovi conte-nuti di prodotto. Tutti questi fattori aumenta-
no i costi e riducono fortemente i margini diprofitto.Per rispondere alle diverse esigenze, non so-lo del mercato ma anche delle normative, tut-te le case automobilistiche investono nellosviluppo di nuove tecnologie, per la massimaparte basate sull’elettronica. La maggior par-te delle innovazioni introdotte sull’auto si ba-sano sull’elettronica.Attualmente la percentuale di componenti-stica elettronica nel valore dell’auto è intornoal 25%. Dieci anni fa era pari al 18% e si ritie-ne arriverà al 35% nel 2010 (fonte Bosch).
2. L’ELETTRONICANELL’EVOLUZIONE DELL’AUTO
Dalla sua nascita, negli ultimi anni del XIX se-colo, l’automobile si è evoluta per molti de-cenni soprattutto nel propulsore, in partico-lare con l’introduzione dei motori a elevatorapporto di compressione, resi possibili an-che grazie alla evoluzione dei combustibili.La successiva, grande rivoluzione si è avutacon la introduzione dei microprocessori. Gli
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
Autonica è un neologismo nato dall’unione dei termini Automobile ed Elettroni-
ca e indica l’applicazione dell’elettronica sull’auto: un impiego abbastanza re-
cente rispetto allo sviluppo della tecnologia elettronica stessa. La maturazione
della tecnologia, soprattutto con la microelettronica, ha consentito di raggiun-
gere i requisiti richiesti con costi accettabili e ora l’elettronica sta rivoluzionando
molti componenti dell’auto. Un processo ancora in forte sviluppo che porterà
ad avere veicoli nel prossimo futuro con miglior comfort, efficienza e sicurezza.
Gianfranco Burzio
AUTONICAL’ELETTRONICA SULL’AUTO
34
3.1
ultimi modelli ormai dispongono di decine dicentraline elettroniche di controllo (ECU,Electronic Control Unit) che controllano prati-camente tutti i dispositivi (motore, freni, cli-matizzazione ecc.).Centraline elettroniche controllano le serratu-re che si aprono con un telecomando, il tergi-cristallo che adatta la sua velocità alla inten-sità della pioggia, le luci che si accendono au-tomaticamente entrando in un tunnel. Ognidispositivo assume una propria intelligenza,rendendo automatiche molte operazioni.Altre centraline si occupano della sicurezza.Ci permettono di avere un migliore controllodel veicolo, in condizioni di bassa aderenza(ABS, VDC) e, se proprio l’incidente accade,cercano di ridurne gli effetti azionando unaserie di airbag intorno agli occupanti il veico-lo, dopo aver teso le cinture di sicurezza pertrattenerci perfettamente.Inoltre, si preoccupano del nostro comfort,controllando il clima interno all’abitacolo, fa-cendoci ascoltare la radio, indicandoci il per-corso da seguire verso la destinazione.La presenza di intelligenza su tutti i vari dispo-sitivi consente di realizzare funzioni comples-se, grazie alla interazione tra i vari dispositivi.Si ottengono così funzioni semplici ma utili,ad esempio l’attivazione automatica del tergi-lunotto, quando viene inserita la retromarciae i tergicristalli sono attivi, oppure molto com-plesse, come il controllo della dinamica delveicolo (VDC, Vehicle Dynamic Control, oppu-re ESC, Electronic Stability Control) ottenutamediante il controllo indipendente della fre-nata sulle quattro ruote e del motore.Ottenere queste funzioni richiede che tutti ivari dispositivi siano tra loro interconnessi. Sesu un veicolo moderno ogni connessione ne-cessaria fosse realizzata, il numero di connes-sioni, e quindi di fili, sul veicolo sarebbe enor-me. Fortunatamente l’elettronica ha fornitouna soluzione anche a questo problema.
3. LA RIVOLUZIONENELLE CONNESSIONIIL MULTIPLEX
Nel primo dopoguerra le vetture di gammaelevata potevano avere circa 70 collegamen-ti elettrici. Oggi ne troviamo anche 1600.Questo significa diversi chilometri di cavi.
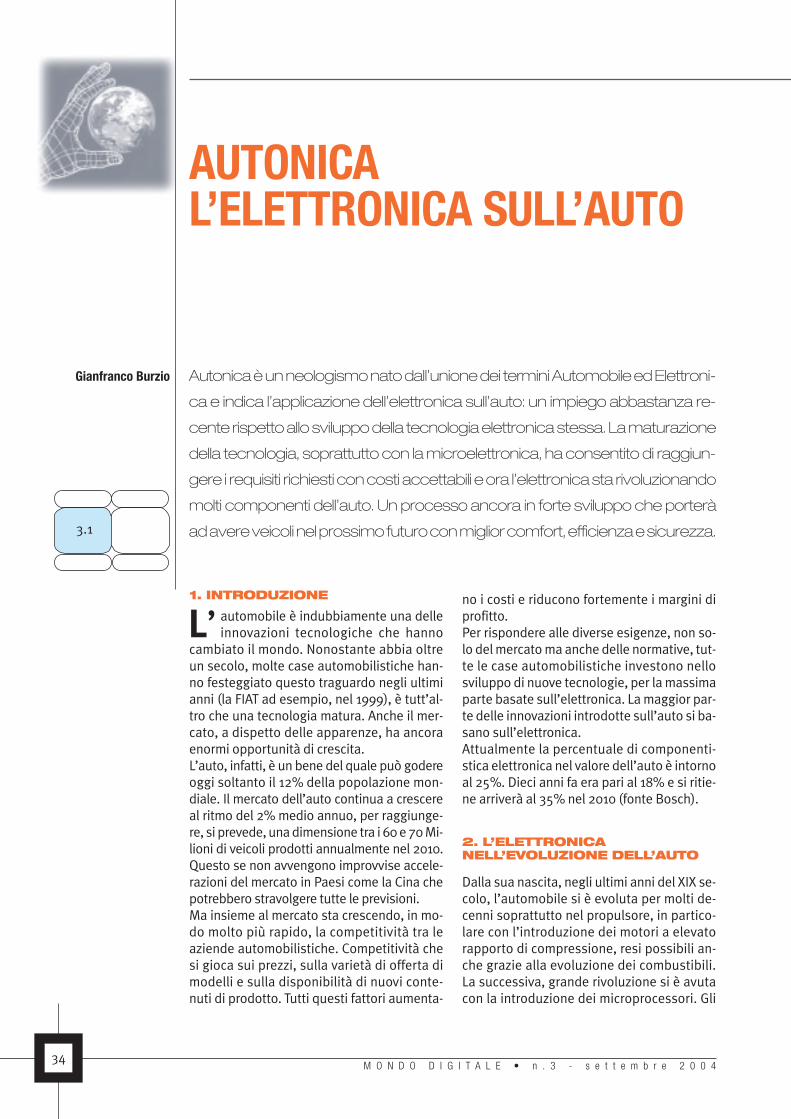
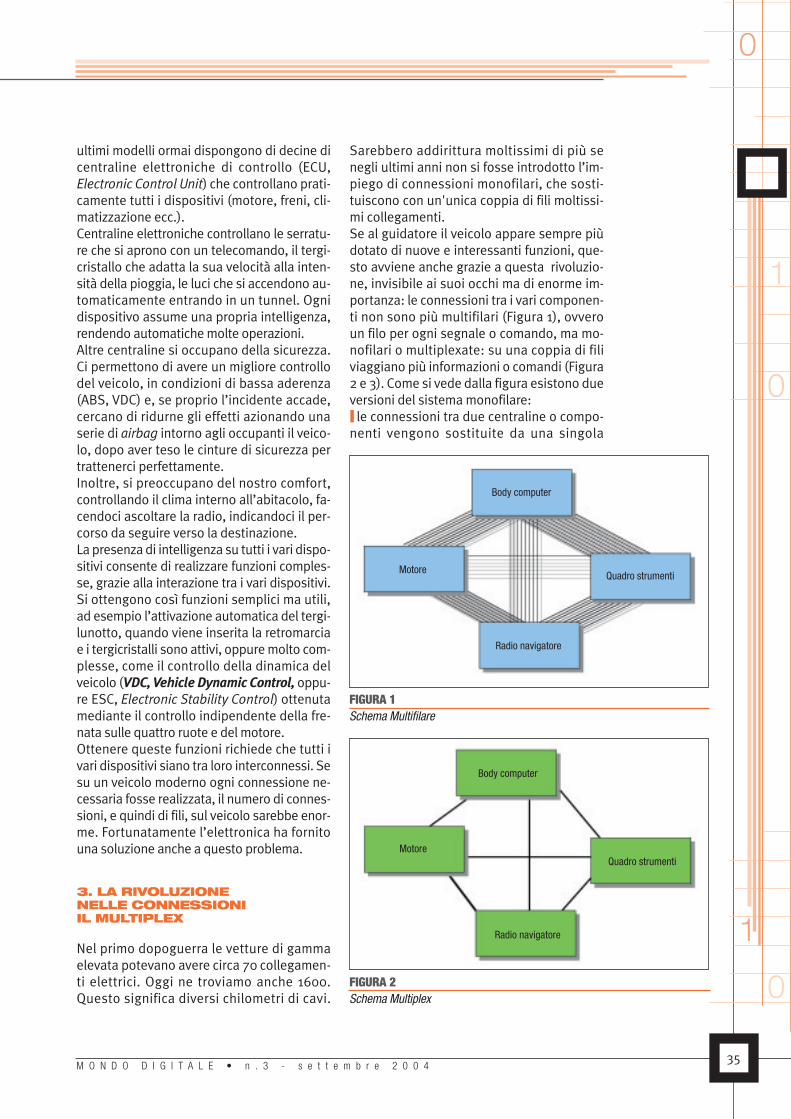
Sarebbero addirittura moltissimi di più senegli ultimi anni non si fosse introdotto l’im-piego di connessioni monofilari, che sosti-tuiscono con un'unica coppia di fili moltissi-mi collegamenti.Se al guidatore il veicolo appare sempre piùdotato di nuove e interessanti funzioni, que-sto avviene anche grazie a questa rivoluzio-ne, invisibile ai suoi occhi ma di enorme im-portanza: le connessioni tra i vari componen-ti non sono più multifilari (Figura 1), ovveroun filo per ogni segnale o comando, ma mo-nofilari o multiplexate: su una coppia di filiviaggiano più informazioni o comandi (Figura2 e 3). Come si vede dalla figura esistono dueversioni del sistema monofilare:❙ le connessioni tra due centraline o compo-nenti vengono sostituite da una singola
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
35
0
0
0
1
Body computer
Radio navigatore
Quadro strumentiMotore
FIGURA 1Schema Multifilare
FIGURA 2Schema Multiplex
Body computer
Quadro strumentiMotore
Radio navigatore
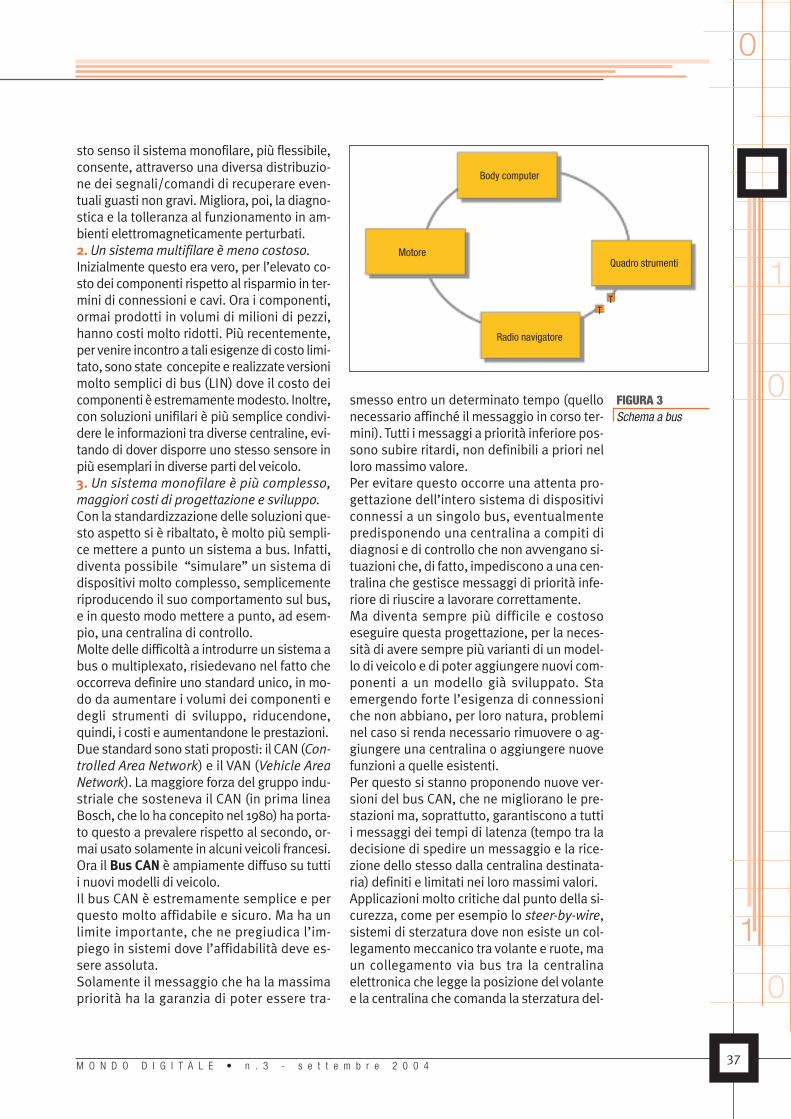
coppia di fili, esiste una singola connessio-ne per ogni coppia di centraline connessetra di loro (multiplex con linee seriali punto-punto, Figura 2);❙ un unico cavo bifilare connette tra di lorotutte le centraline (Bus, Figura 3).Questo cambiamento apparentemente sem-plice ha, invece, richiesto molti anni per es-sere diffuso. I motivi sono diversi.
1. Un sistema multifilare è apparentemente
più affidabile: la rottura di un filo danneggia
soltanto quella particolare informazione o
comando. In un sistema monofilo la rottura
potrebbe compromettere molte funzioni.
Questa maggiore affidabilità è soltanto appa-rente perché la probabilità di rottura di un filoè molto bassa, in confronto alla probabilità diguasti dei vari componenti e sensori. In que-
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
0
0
0
1
36
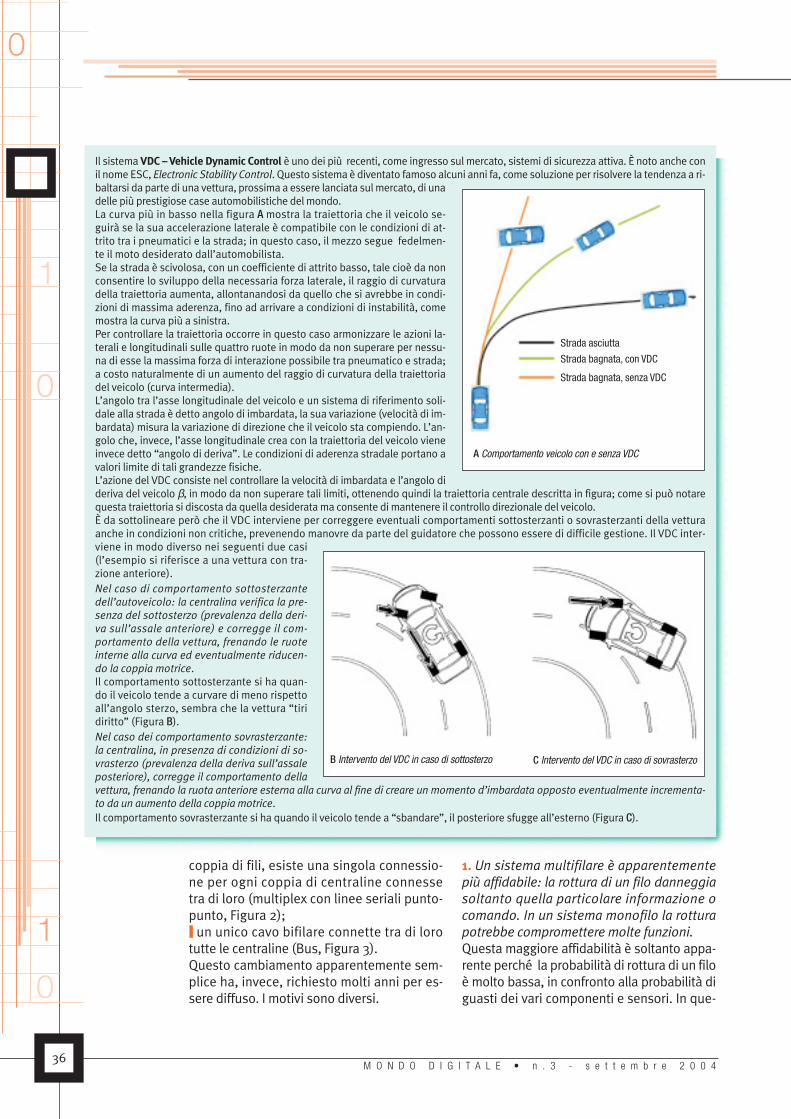
Il sistema VDC – Vehicle Dynamic Control è uno dei più recenti, come ingresso sul mercato, sistemi di sicurezza attiva. È noto anche conil nome ESC, Electronic Stability Control. Questo sistema è diventato famoso alcuni anni fa, come soluzione per risolvere la tendenza a ri-baltarsi da parte di una vettura, prossima a essere lanciata sul mercato, di unadelle più prestigiose case automobilistiche del mondo.La curva più in basso nella figura A mostra la traiettoria che il veicolo se-guirà se la sua accelerazione laterale è compatibile con le condizioni di at-trito tra i pneumatici e la strada; in questo caso, il mezzo segue fedelmen-te il moto desiderato dall’automobilista.Se la strada è scivolosa, con un coefficiente di attrito basso, tale cioè da nonconsentire lo sviluppo della necessaria forza laterale, il raggio di curvaturadella traiettoria aumenta, allontanandosi da quello che si avrebbe in condi-zioni di massima aderenza, fino ad arrivare a condizioni di instabilità, comemostra la curva più a sinistra.Per controllare la traiettoria occorre in questo caso armonizzare le azioni la-terali e longitudinali sulle quattro ruote in modo da non superare per nessu-na di esse la massima forza di interazione possibile tra pneumatico e strada;a costo naturalmente di un aumento del raggio di curvatura della traiettoriadel veicolo (curva intermedia).L’angolo tra l’asse longitudinale del veicolo e un sistema di riferimento soli-dale alla strada è detto angolo di imbardata, la sua variazione (velocità di im-bardata) misura la variazione di direzione che il veicolo sta compiendo. L’an-golo che, invece, l’asse longitudinale crea con la traiettoria del veicolo vieneinvece detto “angolo di deriva”. Le condizioni di aderenza stradale portano avalori limite di tali grandezze fisiche.L’azione del VDC consiste nel controllare la velocità di imbardata e l’angolo dideriva del veicolo β, in modo da non superare tali limiti, ottenendo quindi la traiettoria centrale descritta in figura; come si può notarequesta traiettoria si discosta da quella desiderata ma consente di mantenere il controllo direzionale del veicolo.È da sottolineare però che il VDC interviene per correggere eventuali comportamenti sottosterzanti o sovrasterzanti della vetturaanche in condizioni non critiche, prevenendo manovre da parte del guidatore che possono essere di difficile gestione. Il VDC inter-viene in modo diverso nei seguenti due casi(l’esempio si riferisce a una vettura con tra-zione anteriore).Nel caso di comportamento sottosterzante
dell’autoveicolo: la centralina verifica la pre-
senza del sottosterzo (prevalenza della deri-
va sull’assale anteriore) e corregge il com-
portamento della vettura, frenando le ruote
interne alla curva ed eventualmente riducen-
do la coppia motrice.Il comportamento sottosterzante si ha quan-do il veicolo tende a curvare di meno rispettoall’angolo sterzo, sembra che la vettura “tiridiritto” (Figura B).Nel caso dei comportamento sovrasterzante:
la centralina, in presenza di condizioni di so-
vrasterzo (prevalenza della deriva sull’assale
posteriore), corregge il comportamento della
vettura, frenando la ruota anteriore esterna alla curva al fine di creare un momento d’imbardata opposto eventualmente incrementa-
to da un aumento della coppia motrice.Il comportamento sovrasterzante si ha quando il veicolo tende a “sbandare”, il posteriore sfugge all’esterno (Figura C).
B Intervento del VDC in caso di sottosterzo C Intervento del VDC in caso di sovrasterzo
A Comportamento veicolo con e senza VDC
Strada asciutta
Strada bagnata, con VDC
Strada bagnata, senza VDC
sto senso il sistema monofilare, più flessibile,consente, attraverso una diversa distribuzio-ne dei segnali/comandi di recuperare even-tuali guasti non gravi. Migliora, poi, la diagno-stica e la tolleranza al funzionamento in am-bienti elettromagneticamente perturbati.2. Un sistema multifilare è meno costoso.
Inizialmente questo era vero, per l’elevato co-sto dei componenti rispetto al risparmio in ter-mini di connessioni e cavi. Ora i componenti,ormai prodotti in volumi di milioni di pezzi,hanno costi molto ridotti. Più recentemente,per venire incontro a tali esigenze di costo limi-tato, sono state concepite e realizzate versionimolto semplici di bus (LIN) dove il costo deicomponenti è estremamente modesto. Inoltre,con soluzioni unifilari è più semplice condivi-dere le informazioni tra diverse centraline, evi-tando di dover disporre uno stesso sensore inpiù esemplari in diverse parti del veicolo.3. Un sistema monofilare è più complesso,
maggiori costi di progettazione e sviluppo.
Con la standardizzazione delle soluzioni que-sto aspetto si è ribaltato, è molto più sempli-ce mettere a punto un sistema a bus. Infatti,diventa possibile “simulare” un sistema didispositivi molto complesso, semplicementeriproducendo il suo comportamento sul bus,e in questo modo mettere a punto, ad esem-pio, una centralina di controllo.Molte delle difficoltà a introdurre un sistema abus o multiplexato, risiedevano nel fatto cheoccorreva definire uno standard unico, in mo-do da aumentare i volumi dei componenti edegli strumenti di sviluppo, riducendone,quindi, i costi e aumentandone le prestazioni.Due standard sono stati proposti: il CAN (Con-
trolled Area Network) e il VAN (Vehicle Area
Network). La maggiore forza del gruppo indu-striale che sosteneva il CAN (in prima lineaBosch, che lo ha concepito nel 1980) ha porta-to questo a prevalere rispetto al secondo, or-mai usato solamente in alcuni veicoli francesi.Ora il Bus CAN è ampiamente diffuso su tuttii nuovi modelli di veicolo.Il bus CAN è estremamente semplice e perquesto molto affidabile e sicuro. Ma ha unlimite importante, che ne pregiudica l’im-piego in sistemi dove l’affidabilità deve es-sere assoluta.Solamente il messaggio che ha la massimapriorità ha la garanzia di poter essere tra-
smesso entro un determinato tempo (quellonecessario affinché il messaggio in corso ter-mini). Tutti i messaggi a priorità inferiore pos-sono subire ritardi, non definibili a priori nelloro massimo valore.Per evitare questo occorre una attenta pro-gettazione dell’intero sistema di dispositiviconnessi a un singolo bus, eventualmentepredisponendo una centralina a compiti didiagnosi e di controllo che non avvengano si-tuazioni che, di fatto, impediscono a una cen-tralina che gestisce messaggi di priorità infe-riore di riuscire a lavorare correttamente. Ma diventa sempre più difficile e costosoeseguire questa progettazione, per la neces-sità di avere sempre più varianti di un model-lo di veicolo e di poter aggiungere nuovi com-ponenti a un modello già sviluppato. Staemergendo forte l’esigenza di connessioniche non abbiano, per loro natura, probleminel caso si renda necessario rimuovere o ag-giungere una centralina o aggiungere nuovefunzioni a quelle esistenti.Per questo si stanno proponendo nuove ver-sioni del bus CAN, che ne migliorano le pre-stazioni ma, soprattutto, garantiscono a tuttii messaggi dei tempi di latenza (tempo tra ladecisione di spedire un messaggio e la rice-zione dello stesso dalla centralina destinata-ria) definiti e limitati nei loro massimi valori.Applicazioni molto critiche dal punto della si-curezza, come per esempio lo steer-by-wire,sistemi di sterzatura dove non esiste un col-legamento meccanico tra volante e ruote, maun collegamento via bus tra la centralinaelettronica che legge la posizione del volantee la centralina che comanda la sterzatura del-
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
37
0
0
0
1
Body computer
Radio navigatore
Quadro strumentiMotore
TT
FIGURA 3Schema a bus
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
0
0
0
1
38
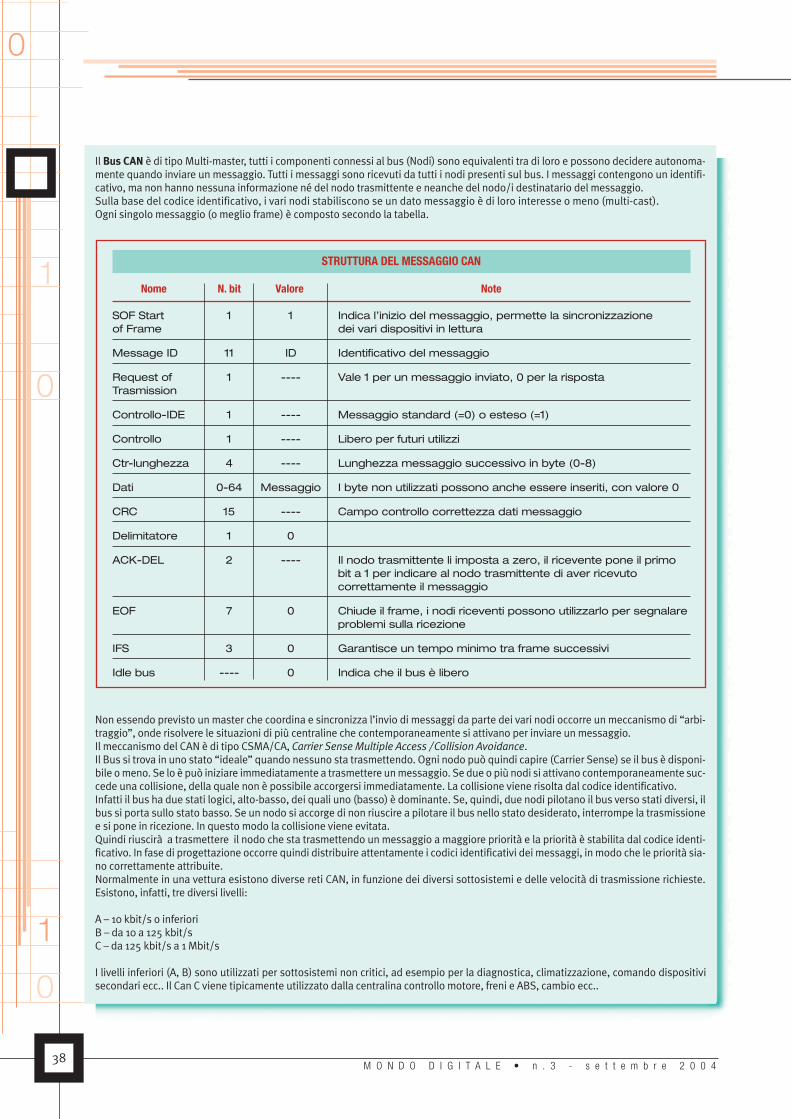
Il Bus CAN è di tipo Multi-master, tutti i componenti connessi al bus (Nodi) sono equivalenti tra di loro e possono decidere autonoma-mente quando inviare un messaggio. Tutti i messaggi sono ricevuti da tutti i nodi presenti sul bus. I messaggi contengono un identifi-cativo, ma non hanno nessuna informazione né del nodo trasmittente e neanche del nodo/i destinatario del messaggio.Sulla base del codice identificativo, i vari nodi stabiliscono se un dato messaggio è di loro interesse o meno (multi-cast).Ogni singolo messaggio (o meglio frame) è composto secondo la tabella.
Non essendo previsto un master che coordina e sincronizza l’invio di messaggi da parte dei vari nodi occorre un meccanismo di “arbi-traggio”, onde risolvere le situazioni di più centraline che contemporaneamente si attivano per inviare un messaggio.Il meccanismo del CAN è di tipo CSMA/CA, Carrier Sense Multiple Access / Collision Avoidance.Il Bus si trova in uno stato “ideale” quando nessuno sta trasmettendo. Ogni nodo può quindi capire (Carrier Sense) se il bus è disponi-bile o meno. Se lo è può iniziare immediatamente a trasmettere un messaggio. Se due o più nodi si attivano contemporaneamente suc-cede una collisione, della quale non è possibile accorgersi immediatamente. La collisione viene risolta dal codice identificativo. Infatti il bus ha due stati logici, alto-basso, dei quali uno (basso) è dominante. Se, quindi, due nodi pilotano il bus verso stati diversi, ilbus si porta sullo stato basso. Se un nodo si accorge di non riuscire a pilotare il bus nello stato desiderato, interrompe la trasmissionee si pone in ricezione. In questo modo la collisione viene evitata.Quindi riuscirà a trasmettere il nodo che sta trasmettendo un messaggio a maggiore priorità e la priorità è stabilita dal codice identi-ficativo. In fase di progettazione occorre quindi distribuire attentamente i codici identificativi dei messaggi, in modo che le priorità sia-no correttamente attribuite.Normalmente in una vettura esistono diverse reti CAN, in funzione dei diversi sottosistemi e delle velocità di trasmissione richieste.Esistono, infatti, tre diversi livelli:
A – 10 kbit/s o inferioriB – da 10 a 125 kbit/sC – da 125 kbit/s a 1 Mbit/s
I livelli inferiori (A, B) sono utilizzati per sottosistemi non critici, ad esempio per la diagnostica, climatizzazione, comando dispositivisecondari ecc.. Il Can C viene tipicamente utilizzato dalla centralina controllo motore, freni e ABS, cambio ecc..
STRUTTURA DEL MESSAGGIO CAN
Nome N. bit Valore Note
SOF Start 1 1 Indica l’inizio del messaggio, permette la sincronizzazioneof Frame dei vari dispositivi in lettura
Message ID 11 ID Identificativo del messaggio
Request of 1 ---- Vale 1 per un messaggio inviato, 0 per la rispostaTrasmission
Controllo-IDE 1 ---- Messaggio standard (=0) o esteso (=1)
Controllo 1 ---- Libero per futuri utilizzi
Ctr-lunghezza 4 ---- Lunghezza messaggio successivo in byte (0-8)
Dati 0-64 Messaggio I byte non utilizzati possono anche essere inseriti, con valore 0
CRC 15 ---- Campo controllo correttezza dati messaggio
Delimitatore 1 0
ACK-DEL 2 ---- Il nodo trasmittente li imposta a zero, il ricevente pone il primobit a 1 per indicare al nodo trasmittente di aver ricevutocorrettamente il messaggio
EOF 7 0 Chiude il frame, i nodi riceventi possono utilizzarlo per segnalareproblemi sulla ricezione
IFS 3 0 Garantisce un tempo minimo tra frame successivi
Idle bus ---- 0 Indica che il bus è libero
le ruote, saranno solo possibili, per l’affidabi-lità che richiedono, con queste nuove gene-razioni di bus.Il Flex-Ray, standard derivato dal Can, propo-sto da una serie di case automobilistiche e diindustrie di elettronica e microelettronica, è ilprincipale candidato a diventare la soluzioneper questa prossima generazione di bus. Que-sto tipo di bus si caratterizza per la sua estre-ma flessibilità, ideale quindi per poter gestireun futuro di modelli sempre più variegati nelleloro configurazioni. Può, quindi, passare daconfigurazioni con caratteristiche simili all’at-tuale CAN, ma comunque superiori in terminidi velocità di trasmissione e robustezza, sinoa configurazioni con elevata affidabilità e fault
tolerant, cioè tolleranti ai guasti.Nel Flex-Ray l’arbitraggio tra i diversi nodiusa un meccanismo di TDMA, Time Division
Multiple Access. I vari nodi si dividono il busin tempi diversi, secondo regole stabilite apriori. Ogni nodo ha, quindi, la garanzia che,entro un certo tempo, avrà la possibilità di in-viare il proprio messaggio.
4. INNOVAZIONE TECNOLOGICADEL VEICOLO
Il trend attuale vede l’innovazione tecnologicadell’auto impegnata soprattutto su tre fronti:1. sviluppo di motorizzazioni che, senza rinun-ciare alle prestazioni, offrano consumi piùcontenuti e un minore impatto ambientale;2. miglioramento della sicurezza di guida;3. miglioramento del comfort e della qualitàdella vita a bordo del veicolo.Per ragioni di spazio non si approfondisce ilprimo dei tre punti, nel quale, anche se inmodo meno “visibile” per l’utente, l’Autonicaha consentito enormi sviluppi. Un esempio èil motore diesel: è un motore tradizionalmen-te “meccanico”, non avrebbe neppure biso-gno di elettricità alcuna per funzionare a regi-me, neanche le candele del motore a benzi-na. Grazie alla elettronica abbinata a sistemidi iniezione common rail, si è trasformato.Era un motore affidabile ma di scarse presta-zioni, rumoroso e inquinante. Ora:❙ le prestazioni sono equivalenti se non supe-riori a quelle dei motori a benzina, la sogliadei 100 CV/litro è ormai prossima (ci sonomotori sul mercato con potenze intorno agli
80 CV/litro); l’erogazione della potenza èperò molto più fluida nel motore diesel, cheha coppie molto superiori ai bassi regimi;❙ le emissioni sono inferiori, fatta eccezioneper le PM10, per le quali sono comunquepossibili soluzioni, con filtri particolari;❙ il rumore è contenuto, è sempre più difficilericonoscere un diesel da un benzina.Questo sta portando il diesel a raggiungere,in Italia, il 50% del mercato, anche se la diffe-renza di costo tra i combustibili diesel e ben-zina è ormai molto limitata e un veicolo die-sel ha, salvo eccezioni dovute a politichecommerciali particolari, un costo superiore aun equivalente motore a benzina.Per realizzare tali prestazioni i motori dieselpiù moderni del gruppo FIAT utilizzano la tec-nologia Multijet, dove il combustibile vieneiniettato nella camera di combustione median-te una serie di getti successivi, modulati op-portunamente in funzione del regime del mo-tore e la richiesta di potenza. Questi sofisticaticontrolli sono realizzati da centraline elettroni-che dotate di notevole potenza di calcolo, di-verse centinaia di MIPS, e sistemi operativireal-time appositamente realizzati o adattati.
5. LA SICUREZZA
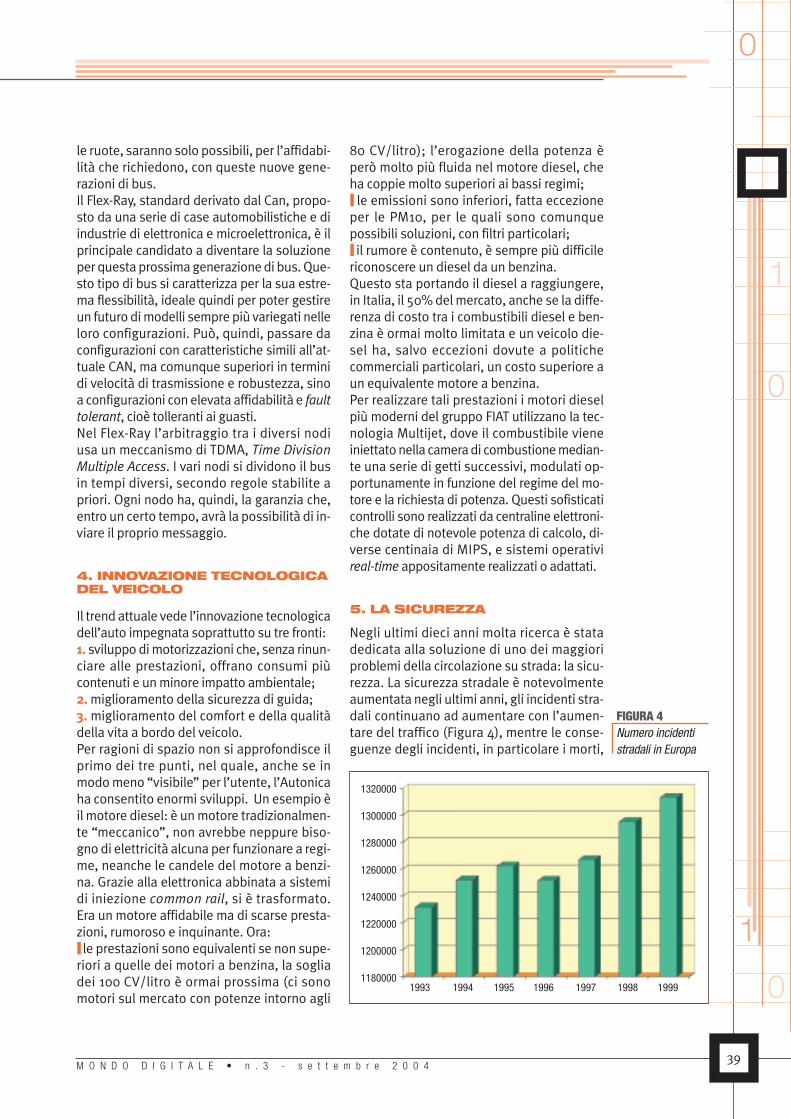
Negli ultimi dieci anni molta ricerca è statadedicata alla soluzione di uno dei maggioriproblemi della circolazione su strada: la sicu-rezza. La sicurezza stradale è notevolmenteaumentata negli ultimi anni, gli incidenti stra-dali continuano ad aumentare con l’aumen-tare del traffico (Figura 4), mentre le conse-guenze degli incidenti, in particolare i morti,
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
39
0
0
0
1
1320000
1300000
1280000
1260000
1240000
1220000
1200000
11800001993 1994 1995 1996 1997 1998 1999
FIGURA 4Numero incidentistradali in Europa
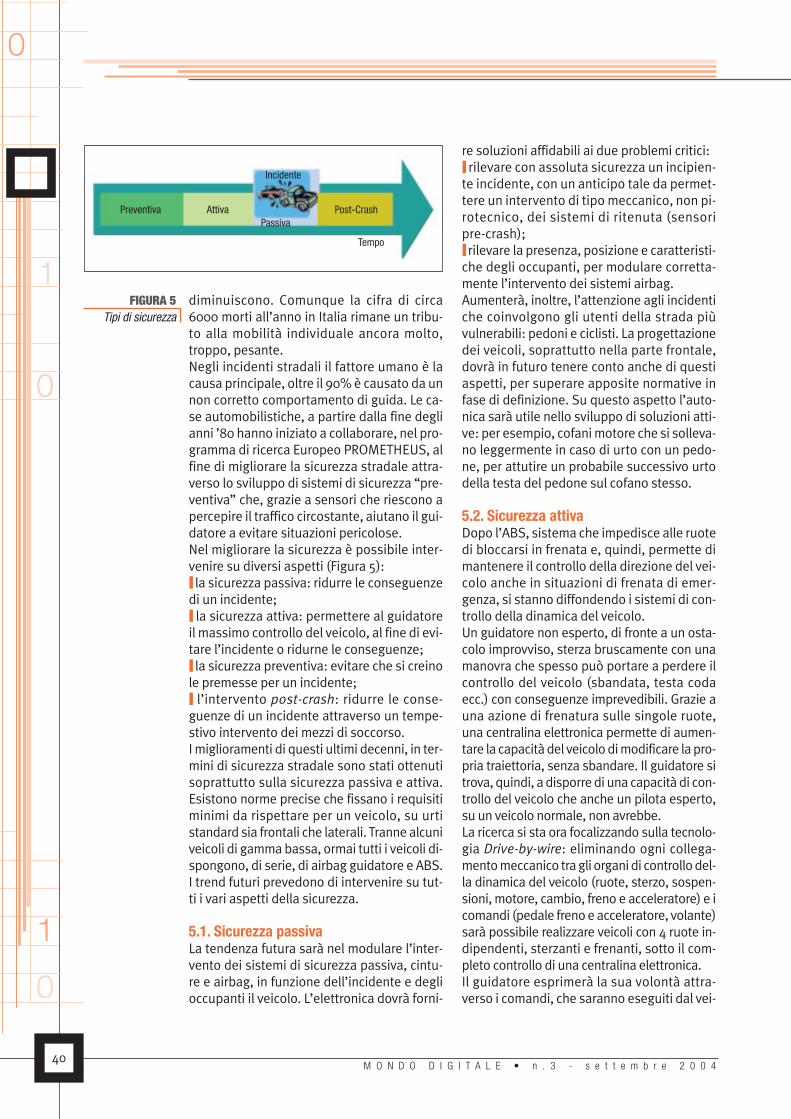
diminuiscono. Comunque la cifra di circa6000 morti all’anno in Italia rimane un tribu-to alla mobilità individuale ancora molto,troppo, pesante.Negli incidenti stradali il fattore umano è lacausa principale, oltre il 90% è causato da unnon corretto comportamento di guida. Le ca-se automobilistiche, a partire dalla fine deglianni ’80 hanno iniziato a collaborare, nel pro-gramma di ricerca Europeo PROMETHEUS, alfine di migliorare la sicurezza stradale attra-verso lo sviluppo di sistemi di sicurezza “pre-ventiva” che, grazie a sensori che riescono apercepire il traffico circostante, aiutano il gui-datore a evitare situazioni pericolose.Nel migliorare la sicurezza è possibile inter-venire su diversi aspetti (Figura 5):❙ la sicurezza passiva: ridurre le conseguenzedi un incidente;❙ la sicurezza attiva: permettere al guidatoreil massimo controllo del veicolo, al fine di evi-tare l’incidente o ridurne le conseguenze;❙ la sicurezza preventiva: evitare che si creinole premesse per un incidente;❙ l’intervento post-crash: ridurre le conse-guenze di un incidente attraverso un tempe-stivo intervento dei mezzi di soccorso.I miglioramenti di questi ultimi decenni, in ter-mini di sicurezza stradale sono stati ottenutisoprattutto sulla sicurezza passiva e attiva.Esistono norme precise che fissano i requisitiminimi da rispettare per un veicolo, su urtistandard sia frontali che laterali. Tranne alcuniveicoli di gamma bassa, ormai tutti i veicoli di-spongono, di serie, di airbag guidatore e ABS.I trend futuri prevedono di intervenire su tut-ti i vari aspetti della sicurezza.
5.1. Sicurezza passivaLa tendenza futura sarà nel modulare l’inter-vento dei sistemi di sicurezza passiva, cintu-re e airbag, in funzione dell’incidente e deglioccupanti il veicolo. L’elettronica dovrà forni-
re soluzioni affidabili ai due problemi critici:❙ rilevare con assoluta sicurezza un incipien-te incidente, con un anticipo tale da permet-tere un intervento di tipo meccanico, non pi-rotecnico, dei sistemi di ritenuta (sensoripre-crash);❙ rilevare la presenza, posizione e caratteristi-che degli occupanti, per modulare corretta-mente l’intervento dei sistemi airbag.Aumenterà, inoltre, l’attenzione agli incidentiche coinvolgono gli utenti della strada piùvulnerabili: pedoni e ciclisti. La progettazionedei veicoli, soprattutto nella parte frontale,dovrà in futuro tenere conto anche di questiaspetti, per superare apposite normative infase di definizione. Su questo aspetto l’auto-nica sarà utile nello sviluppo di soluzioni atti-ve: per esempio, cofani motore che si solleva-no leggermente in caso di urto con un pedo-ne, per attutire un probabile successivo urtodella testa del pedone sul cofano stesso.
5.2. Sicurezza attivaDopo l’ABS, sistema che impedisce alle ruotedi bloccarsi in frenata e, quindi, permette dimantenere il controllo della direzione del vei-colo anche in situazioni di frenata di emer-genza, si stanno diffondendo i sistemi di con-trollo della dinamica del veicolo.Un guidatore non esperto, di fronte a un osta-colo improvviso, sterza bruscamente con unamanovra che spesso può portare a perdere ilcontrollo del veicolo (sbandata, testa codaecc.) con conseguenze imprevedibili. Grazie auna azione di frenatura sulle singole ruote,una centralina elettronica permette di aumen-tare la capacità del veicolo di modificare la pro-pria traiettoria, senza sbandare. Il guidatore sitrova, quindi, a disporre di una capacità di con-trollo del veicolo che anche un pilota esperto,su un veicolo normale, non avrebbe.La ricerca si sta ora focalizzando sulla tecnolo-gia Drive-by-wire: eliminando ogni collega-mento meccanico tra gli organi di controllo del-la dinamica del veicolo (ruote, sterzo, sospen-sioni, motore, cambio, freno e acceleratore) e icomandi (pedale freno e acceleratore, volante)sarà possibile realizzare veicoli con 4 ruote in-dipendenti, sterzanti e frenanti, sotto il com-pleto controllo di una centralina elettronica.Il guidatore esprimerà la sua volontà attra-verso i comandi, che saranno eseguiti dal vei-
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
0
0
0
1
40
Preventiva AttivaPassiva
Tempo
Incidente
Post-Crash
FIGURA 5Tipi di sicurezza

colo sfruttando al meglio la dinamica possibi-le: se occorre sterzare a destra per andare asinistra (e in condizioni di bassa aderenzaquesto può accadere) il veicolo lo farà senzache il guidatore nemmeno se ne accorga.Il livello di affidabilità delle centraline prepo-ste al controllo di tali funzioni dovrà essereovviamente assoluto. Nei sistemi attuali, ABSe VDC, è possibile, qualora si diagnostici unmalfunzionamento, anche minimo, disabilita-re il controllo: si ritorna ad avere un veicolonormale, ma pur sempre in grado di frenare esterzare. Nei futuri sistemi Drive-by-Wire que-sto non sarà più possibile: i sistemi dovrannoavere una affidabilità assoluta, o quantome-no consentire un utilizzo degradato ma pur
sempre funzionale, che non metta a rischio diincidente gli occupanti del veicolo.
5.3. Sicurezza preventivaLe prime applicazioni di questi sistemi sononel controllo automatico della velocità. Gra-zie a radar a microonde o laser, il veicolo rie-sce a percepire la presenza di un veicolo piùlento nella corsia di marcia e rallentare in mo-do da adeguarsi alla velocità del veicolo cheprecede. Questa funzione (detta Cruise Con-
trol Adattativo) è gia presente sul mercatoda alcuni anni: per esempio è disponibile co-me optional su FIAT Stilo e Lancia Thesis.Nel controllo laterale del veicolo sistemi sen-soriali basati su telecamere possono aiutare
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
41
0
0
0
1
Durante i lunghi viaggi in autostrada, con poco traffico, controllare la velocità del veicolo, mantenendola al valore desiderato, di-venta un compito noioso per il guidatore, oltre che stancante. Per questo molti veicoli dispongono del sistema “Cruise Control”,che provvede a mantenere la velocità del veicolo al valore impostato dal guidatore. Quando il veicolo ha raggiunto la velocità desi-derata il guidatore attiva il sistema e tale velocità viene mantenuta automaticamente. Il pedale acceleratore può essere rilasciato.Nel caso il guidatore desideri temporaneamente aumentare la velocità lo può fare liberamente azionando il pedale dell’acceleratore.Quando il guidatore lo rilascia, il veicolo torna automaticamente alla velocità precedentemente impostata. Nel caso di azionamentosul freno il sistema si disinserisce. Ma il guidatore dispone di un co-mando “Resume” per riattivarlo e il veicolo accelera automaticamenteper raggiungere nuovamente la velocità precedentemente impostata.Questo sistema è molto comodo ma soltanto in condizioni di trafficomodesto, oppure molto fluido e con veicoli che hanno tutti quantivelocità molto simili. Queste condizioni sono comunissime, adesempio, negli Stati Uniti, dove infatti il “Cruise Control” è ormai diserie su quasi tutti i veicoli. In Europa, dove tali condizioni sono mol-to più infrequenti, il “Cruise Control” non ha avuto molto successodi mercato. È disponibile di serie o come optional solo sui veicoli dialta gamma.In condizioni di traffico intenso o con veicoli che viaggiano a velocitàdifferenti il “Cruise Control” perde i suoi vantaggi: il guidatore si trovaspesso a dover frenare, per poi riattivare il sistema. Con il Cruise Con-
trol Adattativo questo non accade più: grazie a un sensore radar (Fi-gura A), che percepisce la presenza di un eventuale veicolo più lentonella stessa corsia di marcia, il dispositivo adatta la velocità al veicolo che precede, mantenendo una adeguata distanza di sicurezza.
Quando il veicolo che precede cambia corsia, oppure il guidatore sisposta per sorpassarlo, il sistema rileva che la strada è nuovamentelibera e accelera automaticamente per tornare alla velocità imposta-ta. In assenza di veicoli nella corsia di marcia il dispositivo si com-porta esattamente come un “Cruise Control” normale (Figura B).Con il Cruise Control Adattativo è quindi possibile viaggiare con unavelocità di crociera impostata automaticamente anche nelle nostreaffollate autostrade; solamente se la velocità scende al di sotto di unpredeterminato valore (tipicamente 50 km/h) il sistema si disinseri-sce. Recentemente sono stati introdotti sul mercato anche sistemi ingrado di funzionare a bassa velocità e gestire, quindi, anche la marciain coda (Stop&Go), a singhiozzo.In questo caso, il veicolo si arresta e riparte seguendo il comporta-mento del veicolo che precede. Questo dispositivo ha sollevato uncurioso problema: occorre gestire la situazione dove, tra un arre-sto e la successiva ripartenza, il guidatore ha deciso di scenderedal veicolo! Il veicolo potrebbe ripartire automaticamente, senzacontrollo. Per evitare questo viene disposto un sensore di presen-
za del guidatore, oppure ogni riavvio viene “autorizzato” dal guidatore attraverso un pulsante al volante.
A Sensore radar per Cruise Control Adattativo (Bosch)
130 km/h 120 km/h 100 km/h 130 km/h
B Cruise Control Adattativo

il guidatore a mantenere la corsia di marciaed evitare uscite di corsia. Una segnalazione,acustica o tattile (per esempio vibrazione alvolante) viene generata quando il sistema ri-leva una imminente, non segnalata, uscitadalla corsia di marcia. Irisbus, azienda italo-francese produttrice di autobus, fornisce unsistema che aiuta in questo modo l’autista amantenere il mezzo nella corsia di marcia e,inoltre, ad accostare con la massima preci-sione il mezzo durante le fermate.Sono allo studio sistemi anche per il control-lo automatico dello sterzo (mantenimentoautomatico della corsia, Lane Keeping). I co-struttori automobilistici sono molto prudentisu questa funzione, che potrebbe essere in-terpretata non come un ausilio ma come unavera e propria guida automatica del veicolo.Quindi questa funzione non potrà probabil-mente essere introdotta sul mercato finchénon sarà possibile avere una assoluta affida-bilità sia nel riconoscimento della corsia dimarcia che nel rilievo ostacoli eventualmentepresenti sulla stessa.Altri esempi di funzioni di ausilio alla guidadisponibili sul mercato o in fase avanzata disviluppo sono i seguenti.❑ Visione notturna. Telecamere operanti nel-l’infrarosso consentono al guidatore di avereuna migliore percezione in condizioni di bas-sa visibilità, di notte e con la nebbia.❑ Copertura angolo cieco. Gli specchietti re-trovisori laterali soffrono dell’angolo cieco,area laterale non visibile da parte del guida-tore, se non girando la testa. Mediante tele-camere e centraline elettroniche di elabora-zione immagine è possibile avvisare il guida-tore della presenza di un veicolo in fase disorpasso.❑ Ausilio nelle manovre di parcheggio. Sen-sori di parcheggio sono già ampiamente dif-fusi su molti veicoli. In futuro, una centralinaelettronica rileverà lo spazio tra due veicoli e,se sufficiente, ci aiuterà nella manovra con-trollando lo sterzo.
5.4. Sicurezza post-crashA incidente avvenuto diventa di importanzavitale che l’informazione sia tempestivamen-te trasmessa alle centrali di soccorso, perpredisporre un tempestivo intervento di am-bulanze, vigili del fuoco e polizia. Centraline
a bordo veicolo, protette e dotate di alimen-tazione autonoma, possono eseguire in au-tomatico tale chiamata, tramite un telefonocellulare GSM.Esempi di questo servizio già avvengono,attraverso centrali di soccorso private e pergruppi specifici di utenti con esigenze parti-colari, per esempio trasporto valori. Affin-ché questo servizio si diffonda occorre peròche siano definiti degli standard, a livelloEuropeo, sulla modalità con cui la chiamataviene eseguita.Esistono in questo senso iniziative a livelloEuropeo di standardizzazione. In particolaresi dovrebbe confluire su un unico numero perle chiamate di emergenza: il 112.
6. IL MIGLIORAMENTODELLA QUALITÀ DELLA VITAE DEL COMFORT DI VIAGGIO
Su questo aspetto sono molte le innovazioniintrodotte sul veicolo negli ultimi decenni. Peresempio il climatizzatore è passato da acces-sorio per le auto di lusso a dispositivo di serieanche su veicoli di gamma medio-bassa.Ma ci soffermeremo soprattutto su un aspet-to che promette di modificare sostanzial-mente il modo nel quale ci muoveremo in fu-turo, la telematica. La disponibilità di sistemi di comunicazionein grado di funzionare su un veicolo in movi-mento, assieme alla possibilità di conoscerecon precisione la posizione del veicolo, sonodue tecnologie che stanno consentendo l’in-troduzione di moltissime funzioni a supportodel guidatore. Prima di illustrare brevementele principali funzioni che la telematica per-mette, è utile presentare le tecnologie che lerendono possibili. Si tralascia per ragioni dispazio di illustrare la telefonia cellulare, tec-nologia molto nota e diffusa.Sulla telefonia cellulare è importante solo ac-cennare al fatto che la diffusione delle nuovetecnologie, come GPRS e UMTS, hanno ri-mosso un importante ostacolo per le applica-zioni telematiche su veicolo. Infatti, moltiservizi telematici sono erogati lungo tutto unviaggio e, quindi, per molti minuti o alcune
ore, anche se la quantità di informazioni
scambiate è piuttosto limitata. È ovvio, quin-di, una connessione il cui costo è basato sul
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
0
0
0
1
42
tempo di connessione è poco adatta per que-sto tipo di applicazioni. Il GPRS, in cui il costo
di comunicazione si basa sul volume dei dati
trasmessi, è invece molto più adeguato.
6.1. La localizzazione satellitareLa localizzazione satellitare è una tecnologiasviluppata negli anni settanta, con scopi pu-ramente militari: occorreva una tecnologiache consentisse di guidare missili interconti-nentali sul bersaglio stabilito con una preci-sione di pochi metri. Questo doveva servireper distruggere i bunker atomici blindati delnemico: con una precisione minore i missili,anche se a testata nucleare, potevano essereinefficaci. Solo dopo un grave incidente ae-reo, causato dalla imprecisione degli stru-menti di bordo del velivolo, gli Stati Uniti ac-cettarono di aprire il servizio anche ad impie-ghi civili, ma a determinate condizioni.In particolare, il GPS (Global Positioning Sy-
stem) degli Stati Uniti prevedeva la funzionedella Selective Availability: il segnale dispo-nibile per uso civile era degradato in modotale da non consentire precisioni superiori ai100/150 m. La degradazione avveniva inse-rendo un errore casuale, impossibile da recu-perare se non con tecniche differenziali.Lo sviluppo di questo sistema è avvenuto inpiena guerra fredda, inevitabile quindi cheanche l’allora Unione Sovietica sviluppasseun sistema analogo, chiamato GLONASS,con prestazioni analoghe al sistema america-no. Ma dopo la caduta del muro di Berlino ilsistema è andato in disuso, e quindi oggi èsolamente utilizzabile il sistema GPS. Gli Sta-ti Uniti hanno da diversi anni rimosso la Se-lective Availability, per cui il GPS è ora utiliz-zabile al pieno delle possibilità previste perl’impiego civile.Questa situazione di monopolio degli StatiUniti, che crea una potenziale dipendenza intutto il mondo, ha portato l’Europa a decide-re di dotarsi di un proprio sistema di localiz-zazione satellitare chiamato, in onore delgrande scienziato italiano, Galileo. Il sistemaè in fase di realizzazione e si prevede l’avviodel servizio per l’anno 2008. Anche la Cina eIsraele hanno recentemente aderito alla ini-ziativa Europea, garantendo il loro supportotecnico ed economico. Il sistema Europeo funziona in modo analogo
al sistema GPS, su frequenze molto vicine:sarà, quindi, possibile realizzare ricevitoriGPS-Galileo combinati, senza eccessivi ag-gravi di costo, con molti vantaggi dal punto divista delle prestazioni e della copertura inambito urbano. Infatti, per poter eseguire ilcalcolo della propria posizione occorre “ve-dere” almeno quattro satelliti. Per vedere siintende che esiste una linea diretta tra il rice-vitore e il satellite in orbita, non ostruita daalcun ostacolo (edifici, montagne ecc.). Laprobabilità di “vedere” quattro satelliti ov-viamente aumenta se la flotta di satelliti con-siderata è composta non solo da 24 (GPS) o27 (Galileo) ma bensì da 51 satelliti, la som-ma delle due flotte.
7. SERVIZI TELEMATICI
La combinazione delle due tecnologie, la co-municazione cellulare e la localizzazione sa-tellitare, permette la realizzazione di un gran-de numero di cosiddetti “servizi telematici”,a supporto di una guida più confortevole edefficiente.Alcuni esempi sono presentati nei paragrafiseguenti.
7.1. NavigazioneSpesso, quando si viaggia con qualcuno ver-so una destinazione non familiare, vienespontanea la domanda ”conosci la strada?”.In caso di risposta negativa diventava neces-sario consultare mappe e stradari, oppure af-fidarsi alle informazioni ricavabili dai passan-ti. In entrambi i casi è elevato il rischio di al-lungare la strada e il tempo di percorrenza.I navigatori satellitari, oggi, ci vengono in aiu-to: basta digitare la destinazione desiderata eloro ci guidano verso questa, senza rischio diperderci o allungare il percorso. Il navigatoresatellitare si basa sulla localizzazione satelli-tare, che permette di conoscere la posizionedel veicolo e la sua direzione, e sulla cono-scenza dettagliata della mappa stradale,op-portunamente “digitalizzata”. Tramite questeinformazioni il navigatore è in grado di calco-lare il percorso da seguire per raggiungere ladestinazione desiderata e quindi suggerirci,nel momento opportuno, la manovra da svol-gere, ad esempio svoltare a sinistra al prossi-mo incrocio. Questi suggerimenti vengono
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
43
0
0
0
1

forniti attraverso un display sulla plancia delveicolo e, per ridurre la distrazione dalla gui-da, anche mediante un messaggio vocale. Sidispone di una sorta di “guida elettronica”.I sistemi di navigazione sono stati un grossosuccesso nei primi anni novanta, sul mercatogiapponese. In Giappone le città non hanno,per la maggior parte, un sistema di vie deno-minate con numeri civici ordinati che indicano ivari edifici presenti ai lati delle vie stesse. Lecase sono divise in quartieri e hanno numerisuccessivi, secondo l’ordine con cui vengonocostruite. Spiegare, quindi, a una persona chenon conosce la zona come raggiungere un de-terminato indirizzo è un compito molto com-plesso e gli stessi tassisti spesso non esconomai dalla zona della città a loro nota. I sistemidi navigazione satellitare hanno, quindi, rispo-sto a un forte bisogno, bisogno che i sistemi al-ternativi (mappe cartacee per esempio) non ri-solvevano completamente. Il mercato dei si-stemi di navigazione in Giappone ha avuto unosviluppo rapidissimo, soprattutto con soluzio-ni “after market”, vale a dire sistemi installabi-li su qualsiasi veicolo. Già alla fine degli anninovanta i sistemi di navigazione iniziavano autilizzare la tecnologia DVD per memorizzarele mappe, essendo un CD non più sufficiente acontenere le mappe dell’intero Giappone, oanche solo della sola capitale Tokio. Per fareun confronto, le mappe del territorio italianostanno ancora oggi comodamente su un sin-golo CD. Un’altra curiosità: sempre per ovviarealla mancanza di un sistema di indirizzi strada-li, anche i telefoni fissi sono memorizzati nellemappe, per cui esiste una corrispondenza di-retta tra numero di telefono e la sua posizioneGPS, anche in altezza (numero del piano).I sistemi di navigazione satellitare si stannoaffermando anche in Europa e sono ormai un“must” per i veicoli di gamma alta. Questadiffusione ha permesso anche uno sviluppodelle “mappe digitali”: in Italia è coperto or-mai tutto il territorio nazionale, come retestradale, e circa il 70-80% della popolazionecome copertura urbana.
7.2. Informazioni su punti di interesseLe mappe digitali possono contenere lo stra-dario, ma anche molte informazioni relative acosa si trova “lungo” le strade. Grazie a unnavigatore satellitare è possibile chiedere di
raggiungere la farmacia oppure il distributo-re più vicino, magari lungo la strada che ciporta verso la destinazione desiderata.Però la farmacia potrebbe essere chiusa, co-me anche il distributore. Si potrebbe pensaredi mettere gli orari di apertura sul CD, ma lefarmacie cambiano continuamente il loro tur-no di chiusura notturno o festivo, mentre ilCD si può cambiare una volta all’anno o pocopiù. La comunicazione per via cellulare vienein aiuto: possiamo inviare la nostra posizio-ne a un centro servizi e questo ci ritorna leinformazioni aggiornate sull’apertura degliesercizi. Possiamo, quindi, recarci, senza ildubbio di trovare le saracinesche abbassate,verso la farmacia selezionata.Grazie al collegamento con il Centro Servizi èpossibile anche fare a meno della mappa di-gitale su CD: scelta la destinazione, il CentroServizi può trasmetterci una porzione dellamappa digitale, esattamente quella che ser-ve per seguire il percorso calcolato verso ladirezione. È questa mappa sarà sempre ag-giornata, anche con gli ultimi cantieri di lavo-ro per la costruzione della metropolitana.
7.3. Informazioni sul trafficoAnche se conosciamo la strada per arrivarealla destinazione, difficilmente sappiamoprevedere quanto traffico incontreremo equesto è un’altra frequente causa di ritardinell’arrivo alla destinazione. Quando arrivia-mo, con ore di ritardo per un incidente in au-tostrada, spesso ci diciamo: “se lo avessi sa-puto sarei passato da….”.Disponendo di aggiornate informazioni sultraffico, un centro servizi, collegato al nostroveicolo, può informarci tempestivamente diproblemi di traffico presenti sul percorso chestiamo seguendo, permettendoci quindi, seabbiamo alternative, di considerarle.Questo è uno dei servizi, comprensibilmente,più desiderati dagli utenti, sempre più spes-so alle prese con traffici congestionati. Lasua realizzazione dipende però dalla dispo-nibilità di dati sul traffico precisi e aggiornati.Molto spesso, soprattutto nel caso di inci-denti, una congestione si crea in pochi minu-ti, e, una volta rimossi i veicoli incidentati, inpochi minuti si può risolvere. Il rilievo tempe-stivo di un problema nel flusso del traffico èancora irrisolto.
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
0
0
0
1
44

Anche su questo aspetto la tecnologia sulveicolo potrebbe fornire la soluzione: è il vei-colo stesso che, automaticamente, segnala idati sul traffico del tratto che sta percorren-do. Questo avviene semplicemente trasmet-tendo a una centrale di raccolta dati il percor-so che si è appena seguito e la velocità concui lo si è percorso.Ovviamente, questa soluzione richiede che iveicoli che fungono da sensori del traffico(floating probe car) siano numerosi affinché:❙ sia elevata la probabilità che uno di tali vei-coli si trovi coinvolto in una congestione, neiprimi minuti nella quale si forma;❙ grazie a segnalazioni multiple si possano fil-trare rallentamenti dovuti a problemi del sin-golo veicolo o alla volontà del guidatore.Recenti studi e simulazioni dimostrano che lapercentuale dei veicoli “sensori” necessariadipende dal livello di traffico medio: su trattidi strada molto trafficati un 2% può esseresufficiente, per strade poco trafficate sononecessarie percentuali del 15% o più.In Italia è già attivo, caso unico a livello Eu-ropeo, un servizio di informazioni sul traffi-co che si basa sulle informazioni ricavate dacirca 25.000 veicoli “sensori” (infotrafficobConnect) (Tabella 1). Le informazioni otte-nute sono diffuse in tempo reale a tutti i
clienti del servizio e attraverso notiziari viaradio (RDS Radio Dimensione Suono e Ra-
dio Capital).
7.4. Pagamenti sulla base dell’utilizzoPoter conoscere la posizione del veicolo inogni suo spostamento porta a immaginarenuove modalità con cui vengono erogati mol-ti servizi connessi con l’utilizzo del veicolostesso.Un primo esempio è l’assicurazione: stannonascendo le prime formule “pay-per-use”: ilpremio è costituito da una parte fissa, mini-ma, e una parte variabile, calcolata in fun-zione del numero dei chilometri percorsi edove sono stati percorsi. Per le assicurazio-ni permette di rendere più preciso il calcolodel rischio e premiare quegli utenti che uti-lizzano molto poco il veicolo. Le tecnologieGPS-GSM consentono poi una serie di ac-corgimenti tali da rendere quasi impossibileuna frode assicurativa.Su questo schema stanno nascendo altreiniziative: il governo olandese aveva lancia-to un progetto, ora sospeso, per renderetutte le tasse sul veicolo proporzionali all’u-tilizzo del veicolo stesso. In Germania, dovele autostrade sono gratuite, sistemi telema-tici sono alla base di un progetto per intro-
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
45
0
0
0
1
Traffico Condizioni traffico, aggiornamento automatico lungo il percorsorichiesto
Mete e Indirizzi Ogni indirizzo diventa automaticamente impostato sul navigatore dibordoRicerca e trasmissione di un indirizzo privato o di aziendeAlberghi. Compresa prenotazioneRistoranti. Sulla base della cucina. PrenotazioneSpettacoli. Cinema e teatri con orari e programmazioneLocali.Utilità. Bancomat, ospedali, farmacie, aeroporti, officine, stazioni diservizio ecc.Musei e mostre.Monumenti e luoghi di interesse turistico
Info e News Previsioni meteoOrari di voli, treni e traghettiAttualità e Borsa Valori
Assistenze Assistenza stradale 24 h al giorno, 365 giorni l’anno, in tutta EuropaInvio di una officina mobile o carro attrezzi. Auto sostitutivaAssistenza sanitaria 24 h al giorno, 365 giorni l’anno in tutta EuropaConsulenza medica, invio di una ambulanza, prenotazione di unCentro Ospedaliero
TABELLA 1Servizi telematiciofferti nel pacchettoConnect

durre il pagamento di pedaggi sui soli veico-li industriali.A livello Europeo, si vuole stimolare una ra-pida introduzione di sistemi di localizzazio-ne su tutti i veicoli di futura produzione. Ibenefici, sul traffico e sulla sicurezza, sonoindubbi. Una direttiva è stata recentementeapprovata dal Parlamento Europeo: propo-ne una graduale sostituzione dei sistemi dipedaggio basati sui caselli, noti colli di bot-tiglia nei flussi di traffico, con sistemi elet-tronici tipo Telepass oppure di tipo telema-tico. I secondi dovrebbero, secondo questadirettiva, diventare quelli di riferimento apartire dal 2012 in poi.Ma per il cittadino Europeo le notizie nonsono del tutto positive: la direttiva stimolaquesto rapido passaggio anche per renderedisponibile un nuovo strumento per il con-trollo traffico: il road pricing. Le strade piùcongestionate, anche in ambito urbano, po-tranno essere facilmente rese “a pagamen-to” senza richiedere infrastrutture o provo-care interruzioni al flusso di traffico. Avremoquindi una sorta di “tassametro” anche sulnostro veicolo. Esempi di road pricing esi-stono già: per entrare a Londra occorre pa-gare cinque sterline al giorno, indipenden-temente dalla percorrenza (Figura 6). La te-
lematica consentirà soluzioni nelle quali ilpagamento avviene sulla base dell’effettivoutilizzo della rete stradale urbana.
8. CONCLUSIONI
L’elettronica ha rivoluzionato le vetture mo-derne sia nei sistemi di motopropulsione chein una serie di sistemi funzionali a una guidapiù efficiente, sicura e confortevole. La ricer-ca sta dimostrando che esistono ancora mol-ti sviluppi possibili:❑ nel settore della motopropulsione, accan-to allo sviluppo di motori che utilizzano com-bustibili meno inquinanti (gas naturale, idro-geno), notevoli sviluppi saranno possibilicon le tecnologie ibride (motori elettrici com-binati con motori a combustione interna),che consentono notevoli riduzioni di consu-mi ed emissioni, senza pregiudizio nelle pre-stazioni complessive del veicolo;❑ nel settore dei sistemi di controllo del vei-colo i sistemi Drive-by-wire consentiranno direalizzare veicoli nei quali le quattro ruotepotranno essere controllate indipendente-mente in tutti i parametri: coppia motrice,azione frenante, sterzatura, sospensioni. Imiglioramenti possibili in termini di capacitàdi controllo della dinamica del veicolo sononotevoli, ma anche massima dovrà esserel’affidabilità di tali sistemi;❑ nella sicurezza si diffonderà l’utilizzo deisistemi di assistenza alla guida, al fine di ri-durre in modo “preventivo” situazioni chepossono portare a incidenti stradali;❑ nella telematica si assisterà a un continuoincremento delle informazioni disponibili dal-l’infrastruttura: traffico e condizioni stradaliad esempio. Questo permetterà di rendere iltraffico veramente “intelligente”, centri dicontrollo del traffico che dialogano con i vei-coli, conoscono la loro posizione e destina-zioni desiderate e instradano ogni veicolo se-condo criteri che ottimizzano complessiva-mente l’utilizzo delle infrastrutture stradalidisponibili. I veicoli coopereranno, quindi, tradi loro e con l’infrastruttura per raggiungerelivelli assoluti di sicurezza e minimi intasa-menti di traffico. Sembra fantascienza, ma iprogrammi di ricerca Europei, Giapponesi eStatunitensi dei prossimi anni hanno questesoluzioni tra i loro principali obiettivi.
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
0
0
0
1
46
FIGURA 6Cartello stradale
che a Londra indical’inizio della zona a
pagamento“Congestion
charging”

E la privacy? Vivremo in un mondo dove il“Grande Fratello” saprà sempre dove andia-mo? L’attenzione a questa tematica dovrà es-sere in futuro sempre maggiore, non tanto osolo per aspetti di privacy personale, ma so-prattutto per gli aspetti di sicurezza, sia deidati personali ma anche della incolumità fisi-ca delle persone. Recentemente, negli USA,sono riusciti a copiare il dispositivo a infra-rossi che consente alla polizia di controllare icicli semaforici: chiunque poteva generarsiuna propria “onda verde semaforica”. Oltreagli ovvi problemi di traffico che questo puòprovocare, sono possibili anche usi impropritali da causare incidenti stradali. Massima at-tenzione dovrà, quindi, essere data allo svi-luppo di soluzioni che siano assolutamentesicure, rendendo impossibile un utilizzo im-proprio o dannoso.Se eviteremo questi rischi le nuove tecnolo-gie consentiranno di rendere gli spostamen-ti su strada sempre più sicuri, efficienti,
confortevoli, poco inquinanti e meno stres-santi. Tutto sommato, quindi, più divertentie potremo riscoprire un piacere che in pas-sato avevamo ma ora sembra si sia perso: ilpiacere di guidare. E l’Autonica si occupi ditutto il resto!
Bibliografia[1] Yilin Zhao. Vehicle Location and Navigation Sy-
stems. Artech House 1997.
[2] R.K. Jurgen Automotive Electronics Handbook1999.
[3] Automotive Handbook Robert Bosch 1995.
[5] FISTERA First Report on Key European Techno-logy Trajectories 2003.
[6] Elliot D. Kaplan: Understanding GPS Principlesand Applications Artech House Publishers.
[7] AA.VV.: Proceedings ITS World Congress Ma-drid 2003.
[8] Automotive Electric/Electronics Handbook Ro-bert Bosch SAE.
M O N D O D I G I T A L E • n . 3 - s e t t e m b r e 2 0 0 4
1
47
0
0
0
1
GIANFRANCO BURZIO è laureato in Ingegneria Elettrotecnica. Specializzazione in Automazione Industriale. Dopouna breve attività nel campo dello sviluppo di software gestionale entra nel Centro Ricerche FIAT nel 1982, do-ve lavora allo sviluppo di applicazioni della visione artificiale per ispezione, controllo qualità e guida robot.Nel 1989 diventa responsabile delle applicazioni sul veicolo di sistemi di visione artificiale, nell’ambito delprogramma di ricerca Europeo PROMETHEUS. Diverse applicazioni vengono sviluppate dal suo gruppo permigliorare la sicurezza e il comfort di guida: sensore di sorpasso optoelettronico, sistema di mantenimentocorsia e sistemi sensoriali anticollisione; alcune di queste sono ora disponibili sul mercato. Nel 1995 diventaanche responsabile delle attività nel campo della informativa di bordo e della telematica applicata su veicolo.Ora é responsabile del coordinamento e dello sviluppo delle attività di ricerca della Divisione Tecnologie delCentro Ricerche FIAT (linee di business verso i Settori FIAT e finanziamenti pubblici, progetto Torino Wireless)[email protected]





























