Embed Size (px)
DESCRIPTION
Curso de diseño de Sistemas de Control y Automatismos.Unidad 2B: Galgas extensiometricas (strain gage)
Citation preview

DISEÑO TECNICO DE
SISTEMAS DE CONTROL
y
AUTOMATISMOS
UNIDAD 2B: SENSORES RESISTIVOS
ING. ALBERTO EGEA
2.3.- GALGAS EXTENSOMÉTRICAS (STRAIN GAUGE)

Entre las principales propiedades mecánicas de los materiales se cuentan la tensión y las deformaciones elásticas y plásticas, y también características físicas tales como el módulo Young, límites elásticos y plásticos y resistencia a la tracción y compresión.
Δl
l0
l
F
A
σ : Tensión (Esfuerzo)F : Fuerza de tensión.A : Área original.
Tensión
σ =A
F
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-2
PROPIEDADES MECÁNICAS DE LOS MATERIALES
En una pieza sometida a una Fuerza de tensión se produce una deformación del metal. Si el metal vuelve a las dimensiones originales cuando cesa la Fuerza se ha producido una deformación elástica, en cambio si el metal no puede recuperar sus dimensiones originales la deformación es plástica cuyo límite es la fractura de la pieza.
ε =L0
=L — L0
L0
ΔL
ε : Deformación unitaria.L : Longitud de la muestra después de la deformación.L0 : Longitud de la muestra antes de ser deformada.ΔL : Variación de longitud de la muestra.
Deformación elástica y plástica Deformación unitaria

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-3
E =ε
σ
Módulo de Young
ν =ΔT/T
ΔL/L
ν : Coeficiente de PoissonT: Dimensión trasversalΔT : Variación trasversalL: longitudΔL : Variación de longitud
Coeficiente de elasticidad. Corresponde a la pendiente de la deformación en el comportamiento elástico
Coeficiente de deformación trasversal. Caracteriza la capacidad del material para admitir deformaciones trasversales
Coeficiente de PoissonMaterial ν
LIMITE SUPERIOR
0.5
Acero Inoxidable 0.305
Aluminio 0.334
Bronce 0.14
Cobre 0.355
Cobre Berilio 0.285
Hierro maleable 0.271
Molibdeno 0.307
Níquel Plata 0.322
Titanio 0.32
Zinc 0.331
Material EAcero 2.106
Aluminio 0.675.106
Cobre 1.106
Hierro fundido 0.75.106
E : Módulo de Young σ : Esfuerzoε : Deformación
Ley de Hooke
με : micro deformación = 10-6 m/m

Esfuerzo por tensión Esfuerzo por compresión
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-4
DEFINICION. ESFUERZOS
Galgas extensométricas: Sensores de esfuerzos y deformaciones basados en la variación de la resistencia eléctrica por la deformación de un hilo conductor calibrado, o en resistencias construidas a base a pistas de semiconductor.
Esfuerzo ó Deformación: ε = Fuerza (F)/Área (A)Deformación por tensión : ε = + (F/A) = + (ΔL/L)
Deformación por compresión: ε = — (F/A) = — (ΔL/L)
Relación entre deformación trasversal (εT) y longitudinal (εL) : εT = ν εL

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-5
TIPOS CONSTRUCTIVOS
Galga de hilo metálico o filamento (Wire strain gauge) EI elemento sensible es un hilo conductor metálico de una sección circular de 0,025 mm aproximadamente de diámetro, y encolado sobre un soporte aislante de resina epóxidica, poliéster o material análogo. Para ofrecer la máxima longitud activa dentro de un área reducida, el hilo presenta varios repliegues.
Galga de trama pelicular (Foil strain gauge) EI elemento sensible es una película de metal de pocas micras de espesor, recortada mediante ataque foto químico u otra técnica adecuada.
Galgas Semiconductoras (SCSG)El elemento sensor de la SCSG se hace de un solo cristal del material piezorresistivo tal como silicio, dopado con una impurezas de boro.
Ventajas de las SCSG frente a las Galgas Metálicas.Mayor sensibilidad.Resistencia mas elevada.Menor consumo de energía.Histéresis mecánica insignificante.Más pequeñas y de menor sensibilidad trasversal.Error insignificante debido al esfuerzo mecánicos.
Desventajas de las SCSG frente a las metálicas.La relación de la tensión-resistencia es no lineal.Son frágiles y difíciles de montar en superficies curvadas.Son más costososSon más sensibles a la temperatura

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-7
MATERIALES PARA GALGAS METÁLICAS
MATERIAL COMPOSICIÓNFACTOR DE GALGA (K)
Constantan o Advance 45Ni, 55Cu 2.1
Karma 74Ni, 20Cr, 3Al, 3Fe 2.0
Isoelastic 36Ni, 8Cr, 0.5Mo, 55.5Fe 3.6
Nichrome V 80Ni, 20Cr 2.1
Platino-Tugsteno 92Pt, 8W 4.0
Armour D 70Fe, 20Cr, 10Al 2.0
Constantan o Advance ,es el más utilizado ya que es capaz de mantener constante el factor de galga hasta deformaciones muy elevadas (8%). Karma, también es muy utilizada, presenta tres ventajas sobre el Constantan: a) Pueden alcanzarse compensaciones de temperatura sobre rangos más elevados. b) Ofrece una mejor resistencia a la fatiga debido a su composición Ni-Cr. c) Mantiene una excelente estabilidad con el tiempo.Aleación Isoelastic, presenta la ventaja de su sensibilidad, pero por ser muy sensible a la temperatura no puede compensarse. Se utiliza en medidas de carácter dinámico.Aleaciones Nichrome V, Platino-Tungsteno y Armour D, se emplean en aplicaciones muy especiales en las que resultan de gran importancia la resistencia a temperaturas elevadas y a la oxidación.
El factor de galga K se relaciona con el material conductor de la Galga. Para la selección de un tipo de Galga en una aplicación es importante considerar la variación y sensibilidad térmica del material y tener en cuenta si la aplicación es estática o dinámica. En aplicaciones estáticas la sensibilidad a las variaciones térmicas es menos importante que en las dinámicas.

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-8
GALGAS METALICAS
SOPORTE PARA GALGAS METÁLICAS
GALGAS METÁLICAS: APLICACIONES Y SOPORTES

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-9
MONTAJE
Limpiar y pulir con papel de lija la superficie de montaje considerablemente mas amplia que el tamaño de la galga
Quitar aceites y grasas usando un paño absorbente de algodón con solvente. Limpiar la superficie y marcar la posición de la galga.
Aplicar una gota del pegamento recomendado por el fabricante a la parte posterior de la galga e instalarla en el lugar de montaje respetando el marcado del eje longitudinal.
Cubrir la galga con un foil de polietileno y prensar con fuerza la hoja durante un minuto. Los pasos 3 y 4 deben realizarse con premura a fin de evitar el secado del pegamento.
1
2
3
4

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-10
Cuando la galga queda fijada por el pegamento, quitar el foil de polietileno y comprobar las conexiones eléctricas.
Remover el pegamento que queda fuera de la base de la galga estirándolo y usando un cúter o papel de lija.
Asegurar el cable de conexión a una base de material adhesivo evitando tensiones mecánicas en los conductores que conectan la galga.
Cubrir la galga y los terminales de cables con el agente adhesivo recomendado por el fabricante aplanando con suavidad el conjunto protegido.
5
6
7
8

FUNCIONAMIENTO
[email protected] Curso diseño de sistemas de control- Unidad 2
Características deseables en el funcionamiento de las galgas extensométricasSensibilidad a la deformación lineal en el rango elástico. Alta resistividad para reducir el tamaño de la galga. Baja histéresis para repetición y exactitud en la prueba. Alta sensibilidad a la deformación para producir la máxima señal eléctrica ante una deformación experimentada. Coeficiente de resistencia bajo y controlable para lograr una buena autocompensación de temperatura. Amplio rango de temperatura operacional. Durabilidad con respecto a su fatiga para mediciones dinámicas.
2B-11

RESISTENCIA EN FUNCIÓN DE LA DEFORMACIÓN
Resistencia previa a la deformación: R0 = ρ L / A
Un incremento de la Resistencia (ΔR) puede ser el resultado del cambio de ρ, L o A.
Definiendo: K = (ΔR/R0)/(ΔL/L) = ΔR/(R0 ε), donde K es el factor de galga, resultan los siguientes valores de R = f(ε):Hilo Metálico ΔR = R0 (1+ K ε)
Semiconductor P ΔR = R0 (119,5 ε + 4 ε2)
Semiconductor N ΔR = R0(— 110 ε + 4 ε2)
L: Longitud de galga; A: Sección de galga; R0 : Resistencia previa a la deformación a 25°C; ε : Deformación
Sensibilidad trasversalLas bandas extensométricas están diseñadas para responder en una dirección determinada, pero si se someten a deformaciones transversales pueden proporcionar una pequeña variación de resistencia. Esto se conoce como sensibilidad transversal (ST). Idealmente la sensibilidad transversal es nula. En la práctica el fabricante proporciona la ST en forma de porcentaje. Una de las características deseables de las galgas es que su ST sea baja o despreciable. La ST suele ser menor del 1 %, siendo 0.8% un valor típico.
Ejemplo: Se utiliza una galga de K=2.08±1.0% y ST=0.8% en un ensayo de tracción en acero. La corrección debido por ST será:ΔR/R0 = K (εL + ST εT) = K ε(1 — νST )
= 2.08 ε [1 — 0,03 (0,08/100)] = 2.08 ε[1 — (0,24/100)]
La corrección total es del 0,24 %, cuatro veces menor de la imprecisión del factor de galga, por lo que el efecto de la sensibilidad transversal puede ser despreciado.
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-12
RESISTENCIA DE LA GALGA

LONGITUD DE LAS GALGAS
La longitud de la galga no debe ser mayor a la dimensión de la causa del esfuerzo para que la medición sea aceptable. Cuando la causa del esfuerzo es pequeña, la regla general conduciría a longitudes de galgas muy chicas. Puesto que el uso de galgas muy pequeñas introduce otros tipos de problemas, se tiene que llegar a una relación de compromiso.
Galgas cortas Los galgas cuya longitud es de alrededor de 3mm tienden a exhibir su rendimiento degradado con respecto a su máxima elongación, no son estables bajo esfuerzo estático y su durabilidad se ve afectada cuando están sometidas a esfuerzo cíclico alternativo.
Galgas largasCuando se justifica su empleo, ofrecen ventajas. Son más fáciles de manipular en todos los aspectos de la instalación y cableado que las galgas miniatura. Proveen una mejor disipación de calor porque debido a su resistencia nominal tienen menor potencia por unidad de área de grilla.
Distribución del esfuerzo sobre una galga
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-13

ERRORES
1) De la galga: deformación trasversal. Auto calentamiento. Variación de resistencia por cambios bruscos de temperatura.
2) Desalineación en el montaje de la galga.
3) Variación del factor de galga y valores de señal de salida por variaciones térmicas.
4) Fatiga del material de la galga.
5) Sensibilidad trasversal.
6) Conexionado del puente de medición.
7) No linealidad de la salida del puente de Wheatstone.
8) Interferencias en los cables de señal entre el módulo de medición y el lector de señal.
9) Instrumentos de medición.
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-14

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-15
EFECTO TÉRMICO EN GALGAS METALICAS
Variación porcentual del Factor de Galga K en función de la temperatura
Cuando la temperatura varía, la deformación real de la galga puede desviarse de la deformación medidadebido a: 1.- Dilatación de la galga2.- Dilatación del material soporte 3.- Variación del factor de galga con la temperatura

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-16
Microdeformación aparente de algunas aleaciones (para K= 2) usadas para la construcción de galgas
metálicas en función de la temperatura .
Para corregir el comportamiento de las galgas extensométricas por el efecto de la temperatura, el fabricante proporciona dos curvas, una es la variación del factor de galga con la temperatura y la otra es la Thermal Output, que representa la deformación real de la galga por efecto de la dilatación. Estas curvas son específicas para cada galga pegada sobre un determinado material.
Variación de resistencia en Galgas metálicas en función de la temperatura.

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-17
Variación de resistencia en función de la temperatura para varias concentraciones de impurezas en Galgas semiconductoras tipo P.
ΔR = R0 [k1. ε.(T0/T) + k2 .ε2 .(T0/T)]
Donde:R0 es la resistencia de la galga sin tensión a la temperatura T0.T es la temperatura a la que se lleva a cabo la medida.k1, k2 son constantes.Las bandas de semiconductores no son más sensibles que las metálicas a los cambios de temperatura, pero su influencia se nota más por tener mayores factores de galga.

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-18
DISIPACIÓN TÉRMICA
La potencia generada en forma de calor por la galga viene dada por el efecto Joule.El calor a evacuar o la potencia a disipar es función de dos factores: 1.- el área que ocupa el elemento conductor2.- el área del material sobre el que se pega la galga.La potencia máxima de disipación por unidad de área puede expresarse:PD . A ≥ i2.R
Valores típicos de PD (W/mm2)
Al, Cu: 0.008-0.016Fe: 0.003-0.008Fe (piezas pequeñas): 0.0015-0.003Cerámicos, vidrios: 0.0003-0.0008Plásticos: 0.00003-0.00008
La potencia a disipar por galga limita la tensión de alimentación del circuito en el que se monta. Pdg = V2/Rg = I2 Rg
V= ѴPdg . Rg

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-19
EFECTO TÉRMICO SOBRE LAS MEDICIONES
GALGA MONTADA SOBRE UNA ESTRUCTURA
Variación relativa de la resistividad de la galgaΔ ρ/ρ0= βr (T – T0)
Variación relativa por dilatación de la galgaLongitud: ΔL/L0 = λb (T – T0)
Diámetro: Δd/d0 = λb (T – T0)
En la estructura, donde la galga esta montada, lavariación relativa de longitud por dilatación es: ΔLe/Le0 = λe (T – T0)
Obtenidas las variaciones relativas de la galga y de la estructura, la variación de resistencia de la galga vale:ΔR/R0 = Kαt (T – T0)
Donde :
αt = [(βr –λb) / K]+ λe –λb
αt : deformación unitaria aparente producida por un incremento de temperatura de 1ºC.λb : coeficiente de dilatación del material de la galga.λe :coeficiente de dilatación de la estructura βr :coeficiente de variación de la resistividad con la temperatura.
MATERIAL βr . 10-5 °C-1 λb . 10-5 °C-1 ESTRUCTURA λe . 10-5 °C-1
Constantán 3.7 1.7 Aluminio 2.5
Karma 3.0 1.0 Acero 1.1
Isoelastic 17.9 0.4 Cobre 1.7
Nichrome V 11.3 1.3 Titanio 0.9
Cuando αt ≈ 0, la galga es autocompensada pues no hay variación de la resistencia con la temperatura. El Constantan se utiliza en galgas autocompensadas hasta 200°C. Las aleaciones de Karma pueden mantener la autocompensación hasta unos 400°C.

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-20
GALGAS AUTOCOMPENSADAS TERMICAMENTE
Cuando una galga se monta sobre una estructura metálica conductiva se induce una deformación aparente:
Donde: α: Coeficiente de temperatura de la galga.K: Factor de galgaβs: coeficiente lineal de expansión térmica del metal de la estructura.βg: coeficiente lineal de expansión térmica del metal de la galga.
Las galgas autocompensadas se diseñan a fin de disminuir el valor de εT al mínimo cercano a cero de acuerdo a los valores del βs del material objeto de medición.
gsT ββK
αε Características típicas de εT en función de la temperatura de
una galga autocompensada conectada con tres hilos.

ERRORES POR DESALINEADO
Curvas de error por desalineado en με con parámetro β en el caso de una galga uniaxial para medir valores de deformación entre 1000 με y – 285 με
La desalineación de las galgas respecto de los ejes principales de tensiones producen errores en la medición que deben ser tenidos en cuenta cuando ocurren. Este error no se producirá cuando las galgas estén correctamente alineadas en la etapa de montaje.
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-21
2βcosυ1υ1ε2
1ε Lβ

ERRORES POR SENSIBILIDAD TRASVERSAL
100Kμ1
με
εK
n
:trasversal adsensibilid por porcentual Error
μK1KK
trasversal adsensibilid la incluye
te fabricanel da que Galga de Factor El
T
L
TT
ε
TLF
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-22

DEFORMACIÓN POR MONTAJE EN SUPERFICIES CURVAS
El montaje de una galga sobre una superficie curva adiciona una deformación εA:
Donde:t: Espesor de la galgar: radio de la superficie.
EjemploCalcular εA y ΔR en una galga (R= 350Ω; K=2,3; t=0,020mm) montada sobre una cañería de diámetro 200 mm para una medición de 5000 με.
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-23
tr2
tεA
GA
6AGA
6GG
AG
6A
ΔRde%0,20ΔR
Ω0,008.10350.2,3.10εKRΔR
Ω4,02500.10350.2,3.50εKRΔR
ΔRΔRΔR
10.100,020.1002
0,020
tr2
tε

LINEALIDAD E HISTERISIS
La linealidad y la histéresis en las galgas dependen de diversos factores:a) Nivel de deformaciones alcanzado.b) El material soporte de la galga.c) La calidad y los materiales del pegado. d) El montaje.Cuando se trabaja dentro de los límites de deformaciones indicados por el fabricante, éste debe asegurar valores menores del 1% en galgas con soporte de poliamida y menor del 0.05% en las de soporte epoxi.
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-24

FATIGA
La fatiga afecta a los materiales produciendo pequeñas tensiones que se propagan a lo largo de la vida útil de la galga originando variaciones progresivas en la resistencia. Los fabricantes de galgas suministran datos sobre la fatiga garantizando el número de ciclos que soportan con un cierto grado de deformación en una escala de 100 με partiendo desde cero.
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-25
RESISTENCIA A LA FATIGA DE ALGUNAS ALEACIONES UTILIZADAS EN GALGAS
CURVAS DE FATIGA SUMINISTRADAS POR FABRICANTES

PUENTE DE WHEATSTONE
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-26
PUENTE DE MEDIDA POR COMPARACIÓN
El valor de una resistencia desconocida (R4) se calcula mediante la variación de una Resistencia conocida (R3) poniendo el puente en equilibrio (V0 = 0), siendo R1 y R2 conocidas. El valor calculado de R4 no depende de la tensión de alimentación (E), del tipo de detector ni de su impedancia. Para calcularlo solo es necesario que se consiga la condición de equilibrio.
1
3243241
0
43
3
21
10
db0
43
3d
21
1b
R
RRRRRRR
puente) del o(Equilibri 0V Si
RR
R
RR
REV
VVV
RR
REV;
RR
REV

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-27
PUENTE DE MEDIDA POR DEFLEXIÓN
Para obtener una señal eléctrica se puede medir la salida V0 que será proporcional a las variaciones de resistencias (Galgas) conocidas que se instalen en cada rama del puente.
medida nDeformació :ε
corregida nDeformació :ε
M
C
6
M
MC 10
ε1
εε
:galga una de caso el para linealidad de ónCompensaci
34210
3
3
4
4
2
2
1
10
43
3
21
10
εεεε4
EKΔV
KεR
ΔR : Como
contrario. signo de son adyacentes ramas en svariacione Las
R
ΔR
R
ΔR
R
ΔR
R
ΔR
4
EΔV
varían puente del asResistenci las Cuando
RR
R
RR
REV
Relación no lineal entre la variación de resistencia y la salida de tensión.

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-28
Consideraciones
1.- Las galgas extensométricas son capaces de medir deformaciones del orden del centenar de micro deformaciones que representan valores de incremento de resistencia muy pequeños, por lo tanto el circuito de medición debe ser muy sensible.
Por ejemploInstalando una galga de Constantan cuya resistencia es de 350Ω y K= 2,1, cuando mida 120 με el valor de ΔR será:ΔR = R K ε = 350. 2,1. 120.10-6= 0,088 Ω
Si se miden deformaciones del orden del 5% el valor de ΔR será: ΔR = R K ε = 350. 2,1. 5/100 = 36,75 Ω
ΔR = 10,5 % R
2.- La tensión de salida del puente (V0) es proporcional al factor de galga K y a la tensión de alimentación.
3.- Igual deformación en galgas adyacentes (ε1-ε2 y ε4-ε3) produce V0=0
4.- A causa de las características de las galgas, los valores de V0 son de pequeñas magnitudes (mV) por lo que la señal de salida del puente debe acondicionarse con circuitos amplificadores.

MEDICIÓN CON PUENTE DE WHEATSTONES
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-29
MONTAJE DE 1/4 DE PUENTE
Montaje adecuado cuando se tienen
deformaciones pequeñas y no se
requiere gran sensibilidad o cuando se
dispone de espacio para colocar una
única galga o si se quiere hacer una medida puntual.
salida. la de linearidad no la cuenta
en tener debe se mayores nesdeformacio Para
nes.deformacio pequeñas de medición la para solo
lineal seconsiderar puede que salida de Tensión
εK4
EV
:ndeformació de términos enY
R
ΔR
4
EV
:obtiene se Operando
ΔRRR
:si y R a iguales son
,equilibrio en puente el con as,resistenci las Si
RR
R
RR
REV
:puente del salida de Tensión
20
20
22
34
4
21
10

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-30
MONTAJE DE 1/2 DE PUENTEEJEMPLO: FLEXIÓN
puente.
del adyacentes ramas dos en activas galgas
las eencontrars por lineal salida de Tensión
εK2
EV
:ndeformació de términos enY
R
ΔR
2
EV
:obtiene se operando iguales, son equilibrio
en puente el con asresistenci las Si
ΔRΔRΔR
B. galga la de la a contrario sentido
de y igual es Agalga la en ndeformació Las
RR
R
RR
REV
:puente del salida de Tensión
0
0
12
34
4
21
10

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-31
MONTAJE DE 1/2 DE PUENTEEJEMPLO: TRACCIÓN / COMPRESIÓN
Las galgas se instalan en ramas opuestas del puente. En esta configuración se consigue que los resultados de la medición no se anulen por las diferencias que resultan de los signos de R en cada rama.Resolviendo las ecuaciones del puente para este caso, se obtiene una respuesta no lineal en V0. El montaje de medio puente para tracción y compresión puede ser útil para medir pequeñas deformaciones donde ΔR sea despreciable frente al valor de R.

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-32
MONTAJE DE PUENTE COMPLETOEJEMPLO: TRACCIÓN/COMPRESIÓN
2
1KεEV
:nesdeformacio pequeñas
Para lineal. no salida de Tensión
1Kε2
1εK12KεEV
:ndeformació de términos en obtiene
se operando iguales, son equilibrio
en puente el con asresistenci las Si
KR
ΔR
R
ΔR
εKR
ΔR
R
ΔR
:estrasversal y aleslongitudin
nesdeformacio las doConsiderna
RR
R
RR
REV
:puente del salida de Tensión
L0(Lineal)
2
L
22L
2L
0
4
4
1
1
L
3
3
2
2
34
4
21
10
υ
υ
υυ
υ

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-33
MONTAJE DE PUENTE COMPLETOEJEMPLO: FLEXIÓN
lineal. salida de Tensión
εKEV
:iguales son equilibrio
en puente el con asresistenci las Si
εKεKR
ΔR
R
ΔR
εKR
ΔR
R
ΔR
: )(ε inferiores las y )(ε superiores
nesdeformacio las cuenta en Teniendo
RR
R
RR
REV
:puente del salida de Tensión
S0
SI
4
4
1
1
S
3
3
2
2
IS
34
4
21
10

COMPENSACIÓN DE TEMPERATURA
Los errores que ocurren en ramas adyacentes de
un puente de Wheatstone se compensan, en
consecuencia se compensan los efectos térmicos
en las mismas condiciones.
1/4 de puente:
1: Galga activa
2: Galga compensadora
3 y 4: Resistencias pasivas
Las variaciones de 1 y 2 son similares y se anulan. De la misma
manera se comportaran las galgas 1 y 4.
Puente completo:
Se produce una compensación del efecto térmico si las cuatro
ramas del puente de Wheatstone están formadas por galgas
idénticas.
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-34

CALIBRACIÓN
Ejemplo : Calcular la resistencia de calibración para una galga de 125 Ω, K=2,3 para medir 3000με
Ω17.990,94110.3000.2,3
1125R
6C
El valor de la Resistencia de calibración se calcula:
1
εK
1RR GC
Utilizando una RC = 20 kΩ, la corrección en με es:
2.700,5RR
R
K
1ε
CG
G
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-35

CORRECCIÓN DE LA RESISTENCIA DE CABLES DE CONEXIÓN
La Resistencia de los cables de conexión en serie con las galgas activas producen una atenuación de la señal de salida del puente (Desensibilización) y modifican el Factor de Galga en la lectura a distancia.
LG
GM2h
LG
G
MG
G
2RR
R
K
KD
ε
2RR
ΔR
Kε
R
ΔR
K
K: Factor de galga.KM: Factor de galga modificado.D2h: Desensibilización puente
Conexión de 3 hilos:No se considera la RL del cable AD por no haber variaciones de RG sobre el mismo. La RL del cable en el punto 1 no se considera porque la caída de tensión en esta rama es casi nula. En consecuencia la desensibilización del puente vale:
LG
GM3h
LG
G
MG
G
RR
R
K
KD
ε
RR
ΔR
Kε
R
ΔR
K
K: Factor de galga.
KM: Factor de galga modificado.D3h: Desensibilización puente
Conexión de 2 hilos:La R total en el circuito de sensado es la suma de RG
más 2 RL
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-36

LG
GMgc
LG
G
MG
G
2RR
R
K
KD
ε
2RR
ΔR
Kε
R
ΔR
K
K: Factor de galga activa.KM: Factor de galga modificado.Dgc: Desensibilización puente
Conexión de Galga Compensadora:La resistencia de los cables que conectan a la galga compensadora no se tienen en cuenta porque no se producen deformaciones en la galga.
ABACO PARA EL CÁLCULO DEL FACTOR D PARA UNA GALGA DE 120 Ω MONTADA CON CONEXIÓN DE TRES HILOS
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-37

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-38
ROSETAS
Conjunto de dos o tres galgas montadas sobre una misma base. Cada una de las galgas están orientadas en diferentes ángulos a fin de obtener mediciones de deformaciones en dos o tres direcciones diferentes.

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-39
22
22
2
22
2
22
22
22
2212
221112
221112
22
222
1
222
1
cbba
cbbaca
cbbaca
cbba
cbbaca
cbbaca
ba
cab1
E
E
E
εε
εε2εtan
2
1
máx
máx
máx
máx
mín
máx
corte de esfuerzo Máximo
) (ángulo principal eje según mínima Tensión
) (ángulo principal eje según máxima Tensión
corte de máxima nDeformació
) (ángulo principal eje según mínima nDeformació
) (ángulo principal eje según máxima nDeformació
nesdeformacio de principal Ángulo
θ
θ
θ
θ
θ: Ángulo de máxima deformación cuando |εa|>|εc| y ángulo de mínima deformación cuando |εa|<|εc|.E: Módulo de Youngν: Coeficiente de Poisson
MAGNITUDES Y DIRECCIONES DE TENSIONES Y DEFORMACIONESEJEMPLO: ROSETA RECTANGULAR 45°

ACONDICIONAMIENTO
ESQUEMA
ADQUISIÓN DE SEÑALES MULTIPLES CON INTERFASE (ACONDICIONADOR COMUNICABLE)
LECTORES DE SEÑAL COMERCIALES
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-40

ESQUEMA AMPLIFICADOR DE SEÑAL DEL PUENTE
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-41

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-43
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-44

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-45

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-46

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-47
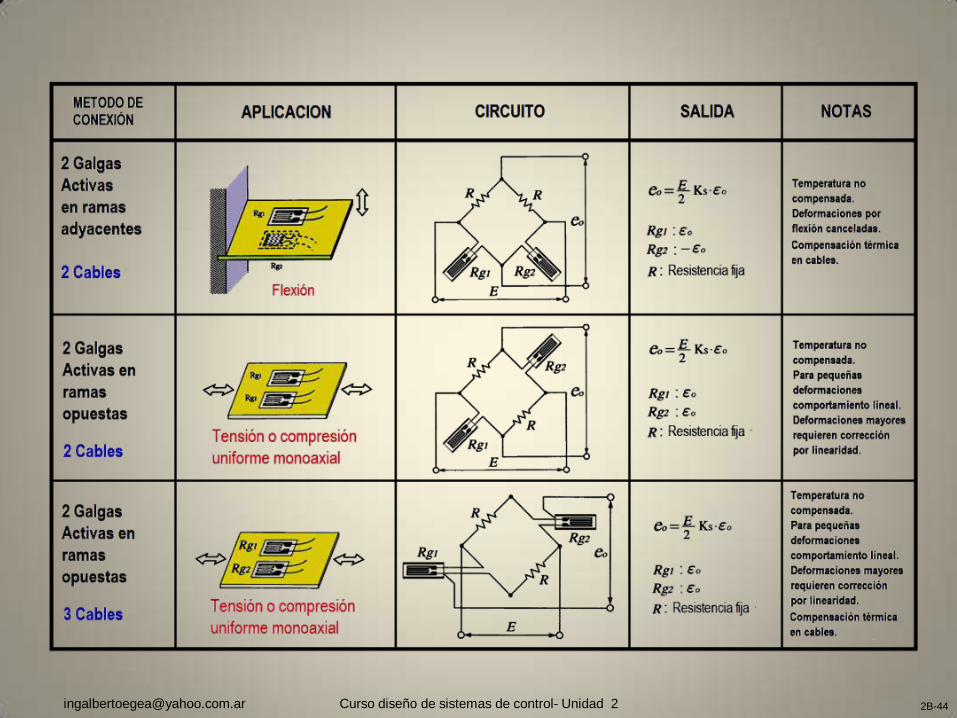
Debe utilizarse una galga simulada en un brazo (2 o 4) del puente para compensar la temperatura.
Se compensan los esfuerzos pero no la temperatura, deben agregarse dos galgas simuladas en los brazos 2 y 4.
Temperatura compensada pero sensible a los esfuerzos trasversales en galga 2.
Compensa temperatura y esfuerzo trasversales.
TRACCIÓN/COMPRESIÓN FLEXIÓN
No exento de deformaciones trasversales y debe compensarse la temperatura con una galga simulada (2 o 4) del puente.
Se compensan los esfuerzos pero no la temperatura, deben agregarse dos galgas simuladas en los brazos 2 y 4.
Máxima sensibilidad y temperatura compensada
Sensibilidad adecuada. Compensa temperatura y esfuerzo trasversales.

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-48
Medio Puente: Las galgas se ubican a ±45° respecto al eje central. Están sometidas a deformaciones longitudinales y trasversales que son iguales y de sentido contrario para la torsión pura. La temperatura está compensada.
TORSIÓN
DEFORMACIÓN DE CAÑERÍAS
Los esfuerzos alcanzarán valores máximos en el eje de la carga y en el eje trasversal. El montaje de galgas en el interior de la cañería les ofrece protección mecánica pero a menudo es difícil instalarlas en ésa locación.
Puente completo : Las galgas se ubican a ±45° respecto al eje central. Las deformaciones longitudinales y trasversales son iguales y de sentido contrario para la torsión asimétrica. La temperatura está compensada.
TORSIÓN ASIMÉTRICA Y DESLIZAMIENTO

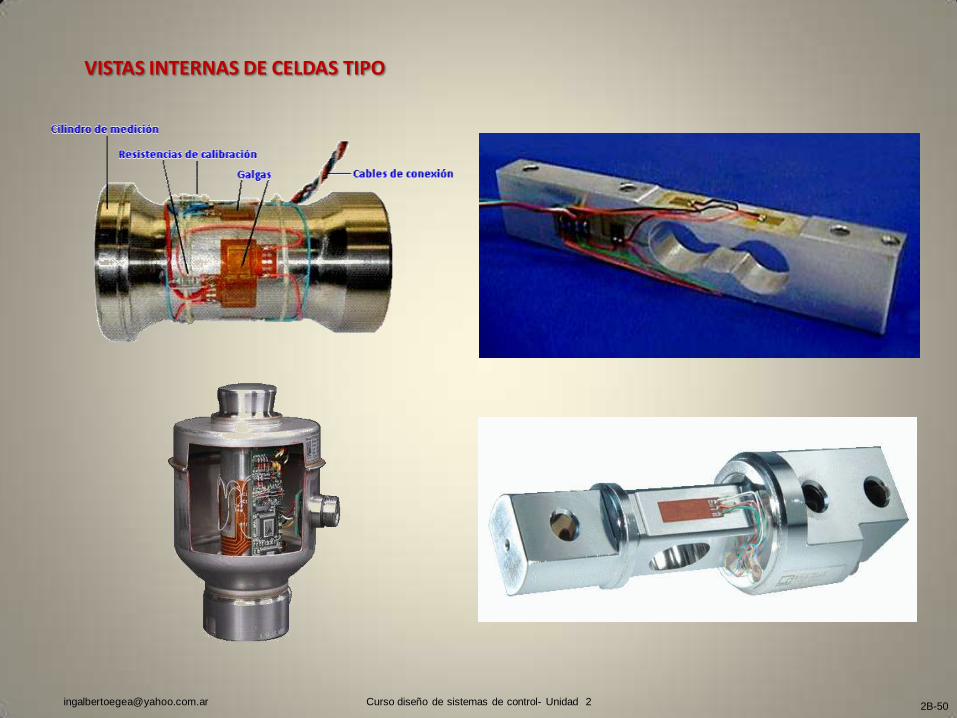
CELDAS DE CARGA CON GALGAS EXTENSOMÉTRICAS
Dispositivo transductor basado en puentes de galgas, diseñado para la medición de cargas mecánicas que entrega una señal proporcional a la fuerza aplicada en él.
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-49
[email protected] Curso diseño de sistemas de control- Unidad 2 2B-50
VISTAS INTERNAS DE CELDAS TIPO

ago-10 Ing. Alberto Egea 51
APLICACIONES

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-53
CÁLCULOS
1.- Calcular el cambio de resistencia en una Galga de hilo metálico de cobre cuando es sometida a 5,500 με, asumiendo R0 = 275 Ω y K= 2,7 Siendo K = ΔR/(R0 ε) ΔR = K.R0. ε = 2,7. 275. 5,500 10-6 = 4,1 Ω
2.- Calcular el valor de KEl valor de R para un conductor cilíndrico de metal es : R0 = ρ0 L0 / A0
Donde: R0 resistencia eléctrica ; ρ0 resistividad; L0 Longitud; A0 sección de diámetro d0 = (π d02)/4 R0 = (ρ0 4L0)/(π d0
2)
a) Suponiendo que la resistividad es independiente de la deformación ΔR = R0 [(ΔL/L0) — 2 (Δd/d0)]
Teniendo en cuenta el módulo de Poisson: (Δd/d0) = — ν (ΔL/L0)
Luego:ΔR = R0 [(1+2ν) (ΔL/L0) = K. ε
De donde: K= 1+2ν
b) Teniendo en consideración la variación de resistividadΔR = R0 [(ΔL/L0) — 2 (Δd/d0) + (Δρ/ρ0)]
La variación de resistividad se relaciona con la variación de volumen según la constante de Bridgman(Δρ/ρ0) = Cb (ΔV/V0) = 2Cb (Δd/d0) + Cb(ΔL/L0)
Luego:ΔR = R0 [(1+Cb) (ΔL/L0) + 2. (Cb—1) (Δd/d0)
Introduciendo el módulo de Poisson:ΔR = R0 [(1+Cb)—(Cb—1) . 2 ν] . ε = K. ε
De donde: K= 1+Cb—(Cb—1).2 ν
Comentarios:1.- En la mayoría de las aleaciones con las que se construyen las galgas Cb≈ 1 (1,11; 1,13) por lo que K ≈ 2 2.- Cuando se supera el límite elástico ΔV ≈ 0 y ν= 0,5, en este caso K ≈ 2 3.- En Galgas semiconductoras, C puede ser del orden de 100 y su signo depende de las impurezas (tipo P o N). Se alcanzan así valores de K ≈ 100/200
Material ν KLIMITE SUPERIOR 0.5 2
Aluminio 0.334 1,668
Cobre 0.355 1,71
Níquel Plata 0.322 1,644
Titanio 0.32 1,64

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-54
3.- Una galga metálica (240 Ω; K= 2,20) está fijada a un pin de acero el cual tiene una longitud de 10.00 cm y un área transversal de 4 cm2. El módulo de Young para el acero es 20.7 x 1010 M/m2. Cuando una carga es aplicada la resistencia de la galga cambia 0.013 Ω. Calcular el cambio de longitud y la fuerza aplicada al pin.
N102,037m0,1
m102,46m104
m
N1020,7
L
ΔLAEF
m104cm10
m1cm4A
L
ΔLE
A
F;
L
ΔLε;
A
Fσ;εEσ
m102,462,20
m0,1
Ω240
Ω0,013
K
L
R
ΔRΔL
L
ΔLK
R
ΔR
36
24
2
10
24
24
22
6
4.- Calcular la variación de resistencia causada por un cambio de 1°C en la temperatura para la galga del problema 3.
72,5Ω0,013
Ω0,942
ΔR
ΔR
Ω0,942Ω240C1C
10,003925RΔTαΔR
C
10,003925α : genérico valor como Tomando
ε
T
0
0T00
00

[email protected] Curso diseño de sistemas de control- Unidad 2 2B-55
5.- Determinar V0 en un puente de Wheatstone conectado en configuración de medio puente compuesto por dos galgas de 240 Ω y dos resistores de 240 Ω cada una cuando la tensión de alimentación es de 10 V, en las siguientes condiciones:a) Cuando una de las galgas se incrementa en 0.013 Ω.b) Cuando la temperatura causa que las galgas (activa y pasiva) se incrementen en 9.4 Ω.c) Cuando la deformación causa que la galga activa se incremente en 0.013 Ω y la temperatura origina que ambas galgas incrementen su resistencia en 9.4 Ω.
mV0,13V4,9987V5
Ω0,013Ω249,4Ω249,4
V10Ω249,4
Ω240Ω240
V10Ω240Vc)
V0V5V5Ω249,4Ω249,4
V10Ω249,4
Ω240Ω240
V10Ω240Vb)
mV0,13Ω4204
V10Ω0,013
4R
EΔRVa)
0
0
0
6.- Una galga (120,2 Ω; K=2,1) se ha montado en una estructura. La estructura es sometida a un esfuerzo que provoca un cambio en la resistencia de la galga a 120,25 Ω. Tomar E= 205 Gpa y calcular la deformación y la Tensión provocadas por el esfuerzo.
MPa40,6110205101,981Eεσ
101,9812,1
104,16
K
RR
ε
104,16120,2
0,05
R
ΔRΩ0,05120,2120,25ΔR
94
44
4
































