Embed Size (px)
Citation preview
Abstract — This study aims to show the development of the electric system automation of a bridge crane that is part of a large active steel mill in Brazil. It appears the use of current equipment in the field of industrial automation in order to improve the performance of this equipment handling and lifting load. It is intended to also make a comparison between the technologies applied in bridge crane, aim of this work, emphasized the advantage over using bridge cranes wound slipring motors and commands made using electromechanical relays. Index Terms — Automation, PLC, Frequency inverter, Bridge
crane, Industrial network. Resumo — Este trabalho apresenta o desenvolvimento da automação do sistema elétrico de uma ponte rolante que faz parte integrante do ativo de uma grande usina siderúrgica brasileira. É apresentada a utilização de equipamentos atuais na área de automação industrial, a fim de melhorar o desempenho deste equipamento de movimentação e elevação de carga. Pretende-se, também, realizar um comparativo entre as tecnologias aplicadas na ponte rolante, objetivo deste trabalho, enfatizando a vantagem em relação às pontes rolantes que utilizam motores de rotor bobinado e comandos feitos através de reles eletromecânicos. Palavras chave — Automação, CLP, Inversor de frequência,
Ponte rolante, Redes industriais.
I. INTRODUÇÃO
Atualmente a produtividade é um fator diferencial para as empresas no novo cenário mundial. Com este foco, as empresas buscam na automação uma solução para o aumento da produtividade dos seus equipamentos. A movimentação de material passou a ser vista como aspecto essencial no campo logístico das linhas de produção. [5] Na siderurgia, por exemplo, as empresas têm procurado instalar pontes rolantes automatizadas que utilizam equipamentos autônomos e inteligentes que incorporem técnicas mais eficientes tanto no aspecto de eficiência energética, confiabilidade e produtividade. O objetivo do trabalho é apresentar o desenvolvimento da automação de uma ponte rolante de uma usina siderúrgica, a fim de melhorar a performance do processo produtivo. Trabalho de Conclusão de Curso apresentado ao Instituto Nacional de Telecomunicações como parte dos requisitos para obtenção do certificado de especialização em Automação e Controle. Orientador: Prof. Dr. Alexandre Baratella Lugli. Trabalho aprovado em 09/08/2013.
II. CARACTERÍSTICAS DA PONTE ROLANTE
Pontes rolantes são máquinas de movimentação de carga de maior aplicação no setor industrial. Este tipo de equipamento permite deslocamentos longitudinal, transversal e vertical, proporcionando uma varredura tridimensional. As pontes rolantes foram originalmente criadas para atender a indústria portuária e são projetadas, hoje em dia, para atender diversos tipos de aplicações. Alguns segmentos da indústria são altamente dependentes destas máquinas, como por exemplo, siderurgia, papel e celulose, montagem industrial e indústria metal mecânica. [5]
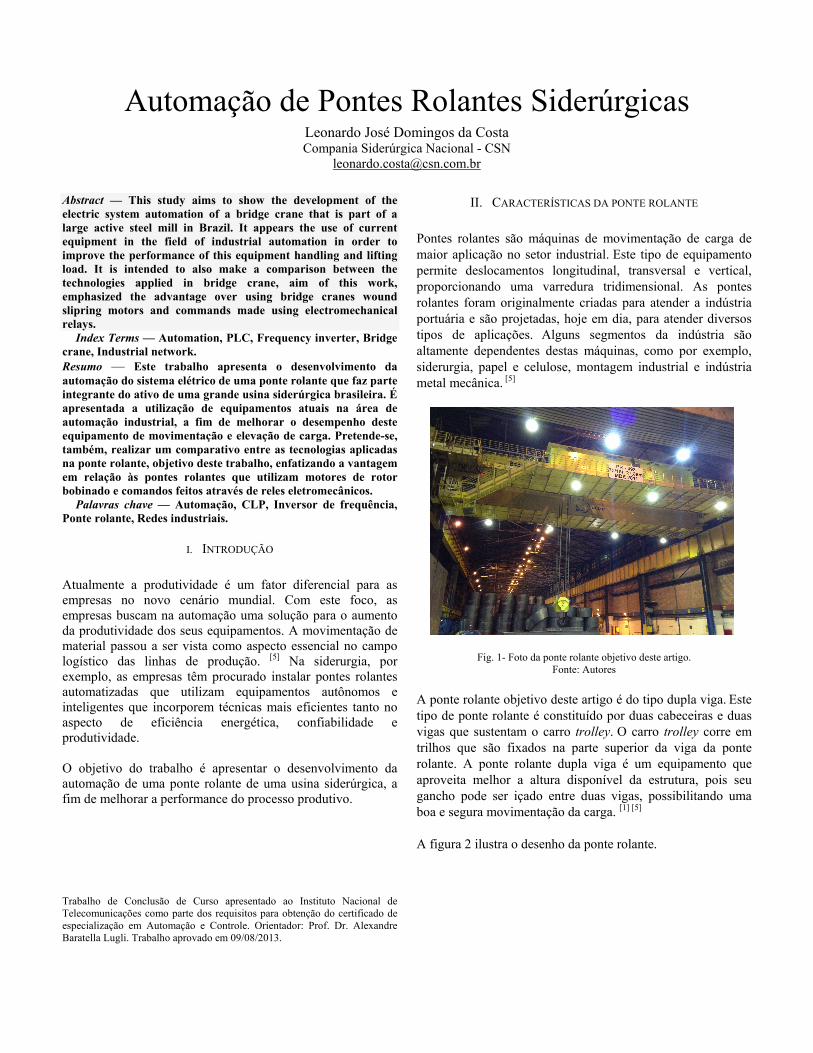
Fig. 1- Foto da ponte rolante objetivo deste artigo. Fonte: Autores
A ponte rolante objetivo deste artigo é do tipo dupla viga. Este tipo de ponte rolante é constituído por duas cabeceiras e duas vigas que sustentam o carro trolley. O carro trolley corre em trilhos que são fixados na parte superior da viga da ponte rolante. A ponte rolante dupla viga é um equipamento que aproveita melhor a altura disponível da estrutura, pois seu gancho pode ser içado entre duas vigas, possibilitando uma boa e segura movimentação da carga. [1] [5]
A figura 2 ilustra o desenho da ponte rolante.
Leonardo José Domingos da Costa Compania Siderúrgica Nacional - CSN
Automação de Pontes Rolantes Siderúrgicas
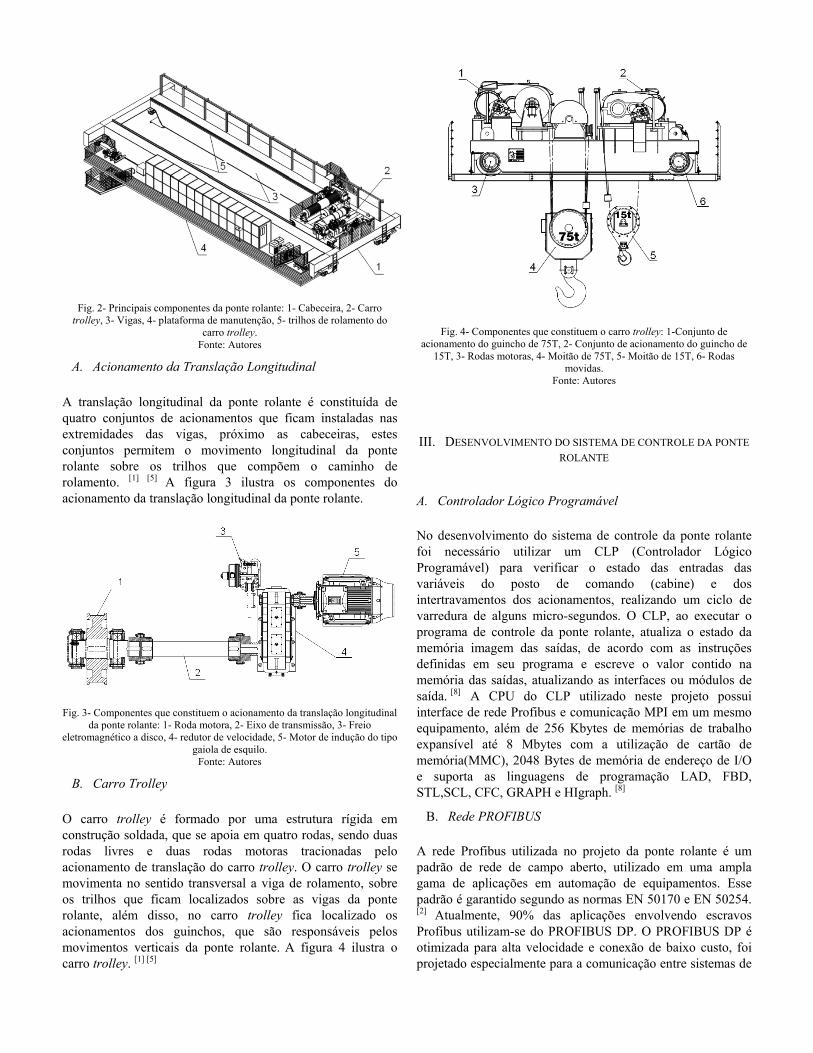
Fig. 2- Principais componentes da ponte rolante: 1- Cabeceira, 2- Carro trolley, 3- Vigas, 4- plataforma de manutenção, 5- trilhos de rolamento do
carro trolley. Fonte: Autores
A. Acionamento da Translação Longitudinal
A translação longitudinal da ponte rolante é constituída de quatro conjuntos de acionamentos que ficam instaladas nas extremidades das vigas, próximo as cabeceiras, estes conjuntos permitem o movimento longitudinal da ponte rolante sobre os trilhos que compõem o caminho de rolamento. [1] [5] A figura 3 ilustra os componentes do acionamento da translação longitudinal da ponte rolante.
Fig. 3- Componentes que constituem o acionamento da translação longitudinal
da ponte rolante: 1- Roda motora, 2- Eixo de transmissão, 3- Freio eletromagnético a disco, 4- redutor de velocidade, 5- Motor de indução do tipo
gaiola de esquilo. Fonte: Autores
B. Carro Trolley
O carro trolley é formado por uma estrutura rígida em construção soldada, que se apoia em quatro rodas, sendo duas rodas livres e duas rodas motoras tracionadas pelo acionamento de translação do carro trolley. O carro trolley se movimenta no sentido transversal a viga de rolamento, sobre os trilhos que ficam localizados sobre as vigas da ponte rolante, além disso, no carro trolley fica localizado os acionamentos dos guinchos, que são responsáveis pelos movimentos verticais da ponte rolante. A figura 4 ilustra o carro trolley. [1] [5]
Fig. 4- Componentes que constituem o carro trolley: 1-Conjunto de acionamento do guincho de 75T, 2- Conjunto de acionamento do guincho de 15T, 3- Rodas motoras, 4- Moitão de 75T, 5- Moitão de 15T, 6- Rodas
movidas. Fonte: Autores
III. DESENVOLVIMENTO DO SISTEMA DE CONTROLE DA PONTE ROLANTE
A. Controlador Lógico Programável
No desenvolvimento do sistema de controle da ponte rolante foi necessário utilizar um CLP (Controlador Lógico Programável) para verificar o estado das entradas das variáveis do posto de comando (cabine) e dos intertravamentos dos acionamentos, realizando um ciclo de varredura de alguns micro-segundos. O CLP, ao executar o programa de controle da ponte rolante, atualiza o estado da memória imagem das saídas, de acordo com as instruções definidas em seu programa e escreve o valor contido na memória das saídas, atualizando as interfaces ou módulos de saída. [8] A CPU do CLP utilizado neste projeto possui interface de rede Profibus e comunicação MPI em um mesmo equipamento, além de 256 Kbytes de memórias de trabalho expansível até 8 Mbytes com a utilização de cartão de memória(MMC), 2048 Bytes de memória de endereço de I/O e suporta as linguagens de programação LAD, FBD, STL,SCL, CFC, GRAPH e HIgraph. [8]
B. Rede PROFIBUS
A rede Profibus utilizada no projeto da ponte rolante é um padrão de rede de campo aberto, utilizado em uma ampla gama de aplicações em automação de equipamentos. Esse padrão é garantido segundo as normas EN 50170 e EN 50254. [2] Atualmente, 90% das aplicações envolvendo escravos Profibus utilizam-se do PROFIBUS DP. O PROFIBUS DP é otimizada para alta velocidade e conexão de baixo custo, foi projetado especialmente para a comunicação entre sistemas de

controle de automação e seus respectivos I/Os distribuídos ao nível de dispositivo. [2] De acordo com LUGLI & SANTOS [2]
“o PROFIBUS DP pode ser utilizado para substituir sistemas centralizados com CLP’s em automação de manufatura (discretas) assim como para transmissão de sinais de 4 a 20 mA para automação de processos analógicos. É própria para substituir a custosa conexão paralela de sinais de 24 Vdc. O PROFIBUS DP é indicado para a transferência de informações em alta velocidade no nível sensor/atuador.” O que motivou a utilização da rede industrial na comunicação entre o CLP e os inversores de frequência, foi a possibilidade de diminuir o custo de implementação do projeto, pois os sistemas ponto a ponto, onde o ponto de I/O (entrada e saída) é conectado diretamente ao CLP (Controlador Lógico Programável), possuem o empecilho de ser um sistema de alto custo de implementação, devido a grande quantidade de cabos necessários e a dificuldade de diagnóstico e manutenção do sistema. [2] Com a utilização da rede industrial foi possível diminuir os custos, pois diminui a quantidade de cabos necessários para a conexão dos dispositivos apresentados no sistema ponto a ponto. [2] Além disso, o sistema utilizando rede industrial requer um menor número de intervenção de manutenção e uma maior facilidade nos atendimentos de manutenção corretiva devido ao menor número de hardware (cabos) e ao recurso de auto diagnóstico da rede. [2] A figura 6 ilustra a arquitetura da aplicação desse trabalho.
Fig. 6- Arquitetura da rede PROFIBUS-DP da ponte rolante. Fonte: Autores
A arquitetura da rede PROFIBUS da ponte rolante foi desenvolvida utilizando um mestre e dez escravos, sendo o mestre a CPU do CLP e os escravos os oito inversores de frequência e as duas IHM’s (Interface Homem-Máquina). Abaixo segue a relação dos componentes da rede PROFIBUS com os seus respectivos endereços de rede.
• Mestre: CPU. • Escravo 1: Inversor da elevação principal • Escravo 2: Inversor do giro do gancho principal. • Escravo 3: Inversor da elevação auxiliar. • Escravo 4: Inversor da translação do carro trolley. • Escravo 5: Inversor n°1 da translação da ponte
rolante. • Escravo 6: Inversor n°2 da translação da ponte
rolante. • Escravo 7: Inversor reserva da translação da ponte e
elevação principal
• Escravo 8: Inversor reserva da translação do carro trolley e elevação auxiliar.
• Escravo 9: IHM da sala elétrica. • Escravo 10: IHM da cabine.
Na comunicação entre a CPU do CLP e os inversores de frequência foi utilizado 8 palavras das 244 palavras disponibilizadas no frame de dados da rede PROFIBUS. Foram utilizadas 8 palavras para fazer o comando dos inversores de frequência e 8 palavras para capturar o status dos parâmetros de saída dos inversores de frequência.
C. Sistema Supervisorio
Com a utilização do CLP no sistema de controle da ponte rolante, surgiu a necessidade do desenvolvimento de um sistema supervisorio SCADA (Supervisory Control and Data
Acquisition) para possibilitar a interação do operador e dos técnicos de manutenção com os dados de entrada e saída do mestre (CLP) e escravos (inversores de frequência) da rede PROFIBUS. [9] O sistema supervisorio desenvolvido para esse projeto possui tecnologia computacional, proporcionando a supervisão do processo através de telas devidamente configuradas, que representam o processo e que podem ser animadas em função das informações recebidas pelo CLP. [10]
A interface é feita de forma simples sendo disponíveis animações, displays, botões, que são associados com as variáveis de campo [9] Através da coleta de informações pelo sistema supervisorio, foi possível apresentar dados em tempo real e de forma gráfica aos operadores e técnicos de manutenção tais como, gráficos de corrente, alarmes dos inversores, temperatura dos motores, velocidade dos acionamentos, entre outros. Além disso, os dados coletados dos equipamentos de campo como alarmes, velocidade, temperatura, corrente, frequência, torque, entre outros, podem ser agora armazenados em um banco de dados para utilização posterior. [6]. Para o hardware do sistema supervisorio foi utilizado duas IHM’s, sendo que a IHM que contém as telas com as informações operacionais da ponte rolante foi instalada no posto operacional (cabine) e a IHM que contém as telas dos parâmetros de saída dos escravos está instalada na sala elétrica da ponte rolante. As figuras 7 a 11 ilustram as telas geradas na IHM.

Fig. 7- Tela Geral.
Fig. 8- Tela da elevação principal.
Fig. 9- Tela do Ladder da elevação auxiliar.
Fig. 10- Tela de acesso aos componentes da rede PROFIBUS.
Fig. 11- Tela das grandezas elétricas e mecânicas dos motores.
IV. DESENVOLVIMENTO DO SISTEMA DE ACIONAMENTO DOS MOTORES DA PONTE ROLANTE
Todos os motores da ponte rolante deste trabalho são acionados eletronicamente por inversores de frequência, sendo que os motores da elevação principal e auxiliar operam com controle de velocidade e torque com técnica vetorial de fluxo em malha fechada com realimentação da rotação por meio de encoder incremental e os motores da translação da ponte e carro trolley operam com controle de velocidade e torque constante com a técnica de controle escalar (V/f). Os inversores de frequência escolhidos são dotados de módulo de controle de velocidade e torque e com as características: controle escalar (V/f) ou controle vetorial programável no mesmo equipamento, controle vetorial com realimentação por encoder e função de frenagem reostática. [3]
A. Aplicação de Motores de Indução em Pontes Rolantes
Na maioria das aplicações de motores de indução em pontes rolantes são utilizados motores do tipo rotor bobinado. Os motores de rotor bobinado são acionados diretamente pela rede elétrica e durante a partida recorre-se a inserção de resistências no circuito rotórico para variar a velocidade. Essas resistências são inseridas ou retiradas para que o motor possa
desacelerar ou acelerar respectivamente. Acrescenta-se ainda que esse método requer sucessivas comutações durante processo de partida, o que exige solicitações transitórias no barramento de alimentação do motor, além de submeter o motor a elevações de temperatura que podem diminuir a sua vida útil. [1] [12] [13] O circuito de partida para um motor tipo rotor bobinado está ilustrado na figura 12.
Fig. 12- Circuito de partida do motor de rotor bobinado. [1] [12] [13]
B. Inversores de Frequência
Os motores de indução do tipo rotor gaiola, durante muito tempo, não puderam ser utilizados em acionamentos de alto desempenho devido a complexidade envolvida no seu controle, em função das características como plantas não lineares, fortemente acopladas em multivariaveis. Os acionamentos de alto desempenho eram dominados totalmente pelos motores de corrente continua. Este fato é justificado pela ocorrência de um desacoplamento natural existente entre o controle de fluxo, estabelecido pela corrente de campo e o controle de torque, estabelecido pela corrente armadura. Este controle desacoplado entre o fluxo e torque facilitava enormemente o projeto dos acionamentos controlados de alto desempenho dinâmico. O aparecimento dos princípios teóricos de controle escalar (V/f) e vetorial, ocorrido no final da década de 60 e inicio da década de 70 com os trabalhos de Hasse e Blaschken permitiu o controle do motor de indução de forma semelhante ao motor de corrente continua de excitação independente. [13] Com o desenvolvimento teórico dos controles escalar e vetorial mais a evolução da eletrônica, da engenharia de software e do desenvolvimento de novos semicondutores de potência, como o IGBT (Insulated Gate
Bipolar Transistor) possibilitou a criação dos inversores de frequência que acionam eletronicamente em alto desempenho os motores de indução. [12] [13] Os inversores podem ser classificados pela sua topologia, que é dividida em três partes, sendo a primeira parte para o tipo de retificação de entrada, a segunda para o tipo de controle do circuito intermediário e a terceira para a saída. A figura 13
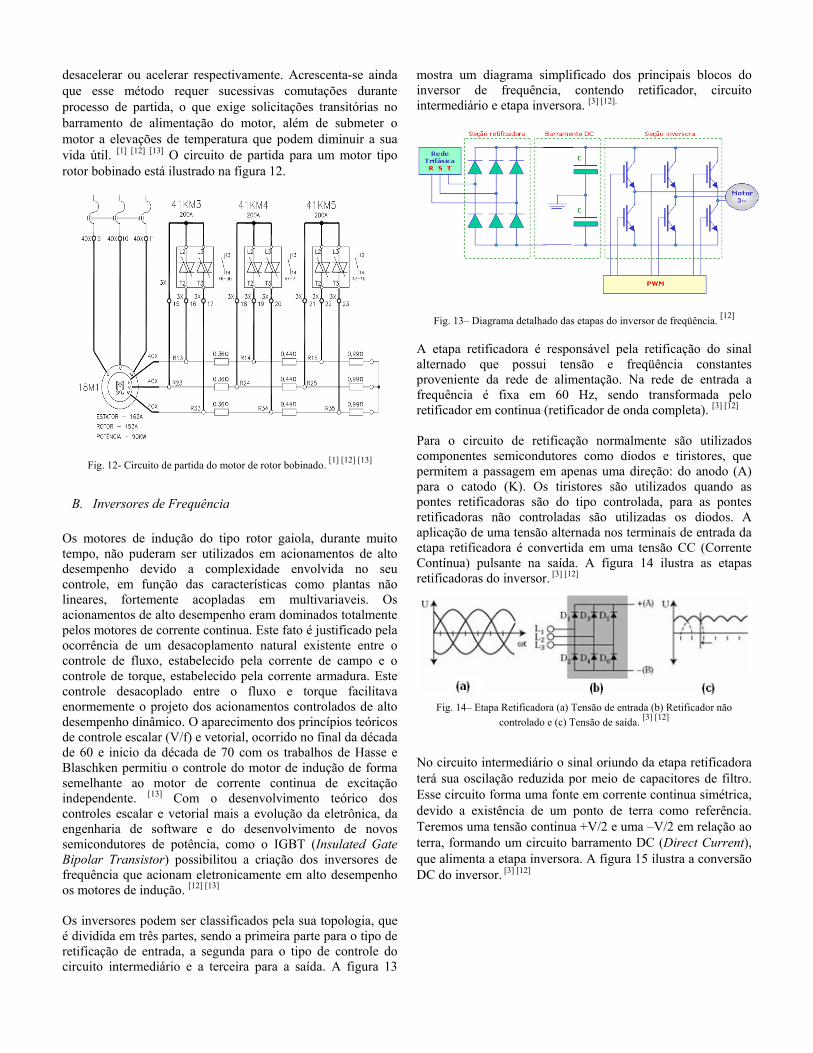
mostra um diagrama simplificado dos principais blocos do inversor de frequência, contendo retificador, circuito intermediário e etapa inversora. [3] [12].
Fig. 13– Diagrama detalhado das etapas do inversor de freqüência. [12]
A etapa retificadora é responsável pela retificação do sinal alternado que possui tensão e freqüência constantes proveniente da rede de alimentação. Na rede de entrada a frequência é fixa em 60 Hz, sendo transformada pelo retificador em continua (retificador de onda completa). [3] [12] Para o circuito de retificação normalmente são utilizados componentes semicondutores como diodos e tiristores, que permitem a passagem em apenas uma direção: do anodo (A) para o catodo (K). Os tiristores são utilizados quando as pontes retificadoras são do tipo controlada, para as pontes retificadoras não controladas são utilizadas os diodos. A aplicação de uma tensão alternada nos terminais de entrada da etapa retificadora é convertida em uma tensão CC (Corrente Contínua) pulsante na saída. A figura 14 ilustra as etapas retificadoras do inversor. [3] [12]
Fig. 14– Etapa Retificadora (a) Tensão de entrada (b) Retificador não
controlado e (c) Tensão de saída. [3] [12]
No circuito intermediário o sinal oriundo da etapa retificadora terá sua oscilação reduzida por meio de capacitores de filtro. Esse circuito forma uma fonte em corrente continua simétrica, devido a existência de um ponto de terra como referência. Teremos uma tensão continua +V/2 e uma –V/2 em relação ao terra, formando um circuito barramento DC (Direct Current), que alimenta a etapa inversora. A figura 15 ilustra a conversão DC do inversor. [3] [12]

Fig. 15– Link DC (a) Tensão de entrada (b) Capacitor do circuito
intermediário e (c) Tensão de saída. [3] [12]
Na etapa inversora estão instalados os transistores IGBT’s responsáveis pela inversão de tensão continua proveniente do barramento DC num sinal alternado, com tensão e frequências variáveis. A etapa inversora é constituída de seis transistores de potência chamados IGBT’s. Com uma lógica fornecida pelo circuito de controle os transistores atuam de modo a gerar uma tensão de saída alternada e defasada de 120° entre elas. Como os transistores trabalham como chaves liga desliga, a forma de onda do inversor de frequência é sempre quadrada. [3] [12] Para obter uma tensão de saída mais próxima da senoidal, os transistores chaveiam modulando sua largura de pulso através de uma técnica chamada PWM (Pulse Width Modulation). A figura 16 ilustra a etapa inversora. [3] [12]
Fig. 16– Etapa inversora. [3] [12]
C. Controle Escalar
O controle escalar foi a técnica de controle de velocidade adotada para o controle dos inversores de frequência que acionam os motores de translação da ponte e carro trolley que necessitam apenas de variação de velocidade. Uma grande quantidade de acionamentos de velocidade ajustável de baixo desempenho utiliza o método de controle V/f. O fato dos sistemas serem de baixo desempenho permite utilizar esquemas de controle relativamente simples, que são baseados na variação da frequência e na conservação do fluxo aproximadamente constante. Neste método de controle, a tensão aplicada ao motor é variada proporcionalmente a frequência até um valor próximo da tensão nominal, de modo a manter o fluxo constante ligado com o estator. [10] Em um
sistema com controle escalar, é possível uma precisão de velocidade de até 0,5% da rotação nominal, sem variação de carga, e de 3% a 5% com variação de carga de 0 a 100% do torque nominal. Utilizando este método de controle é possível garantir torque constante em todo o range de velocidade nominal do motor. A figura 17 ilustra a razão V/f do inversor. [3] [12]
Fig. 17- Razão V/f . [1]
D. Controle Vetorial
Em aplicações nas quais é exigido controle de posição como nos acionamentos de elevação da ponte rolante, existe a necessidade de um alto desempenho dinâmico (respostas rápidas e alta precisão), o motor elétrico deverá fornecer essencialmente um controle preciso de torque para uma faixa extensa de condições operacionais. Ao contrario do controle escalar do tipo V/F (tensão / frequência), as técnicas vetoriais de controle pra máquinas de indução apresentam alto desempenho tanto em regime permanente quanto durante transitórios, este rendimento é conseguido através do controle independente do torque e do fluxo. [11] O controle vetorial, também conhecido como controle por orientação de campo, foi proposto por (Blaschke, 1972), e objetivamente consiste em controlar as correntes do estator da máquina representadas por um vetor. Esse tipo de controle se baseia em projeções que transformam um sistema trifásico em um sistema de duas coordenadas (d e q), implicando numa transformação do modelo da máquina de indução em um modelo similar ao de uma máquina de corrente continua, de onde decorre o desacoplamento entre o controlador de corrente do rotor (torque) e o de fluxo, tornando o controle bem mais simples e eficaz tanto para as altas quanto para as baixas rotações. A máquina de indução tem suas correntes de rotor e estator representadas em regime permanente pelo diagrama vetorial ilustrado abaixo. A figura 18 ilustra as relações angulares entre os vetores de um inversor vetorial. [12]

Fig. 18 - Relações angulares entre os vetores de corrente do controle vetorial.
[12] Genericamente, os sistemas de controle vetorial de velocidade para máquinas de indução seguem o esquema no diagrama da figura 19. [4]
Fig. 19- Esquema genérico de um sistema de controle vetorial de velocidade
orientado pelo fluxo do rotor. [4]
De acordo com a figura 19, o controle vetorial de velocidade é composto basicamente por três controladores do tipo PI (Proporcional/Integral), sendo eles: um controlador para erro de velocidade cuja saída é o torque elétrico de referência. Em série com esses controladores, tem se o controlador de torque, Iqs. E o terceiro controlador executa o controle de corrente de magnetização, Ids, o qual é responsável pela geração da referência de corrente de campo. [12]
E. A função da Frenagem Dinâmica nos Inversores de
Frequência
Os motores de indução acionados por inversores de frequência oferecem ainda a vantagem de frenagem, drenando para um determinado circuito a energia mecânica armazenada no circuito rotórico. Os inversores de frequência instalados na ponte rolante, objetivo desse trabalho, utilizam o método de frenagem denominada por frenagem reostática. [1] De acordo com SEELIG (2007) [1], “nesta técnica de frenagem, o motor de indução funciona como gerador, fornecendo um torque
contrário ao torque motor. Quando o escorregamento estiver negativo, o torque no motor inverte, desenvolvendo um uma condição de freio ao motor. Efetuando-se no sistema de controle dos inversores de freqüência, com a diminuição na frequência de operação, o escorregamento torna-se negativo.”
A figura 20 ilustra a curva de frenagem do motor acionado por um inversor de frequência. [1]
Fig. 20- Processo de frenagem para o motor de indução trifásico acionado por
inversor de frequência. [1]
Na figura 20, é possível considerar as novas condições impostas à máquina pelo inversor de freqüência e a nova velocidade síncrona correspondente a esse novo valor de freqüência, que está indicada pelo ponto 3. Como a velocidade do motor não pode ser alterada instantaneamente (devido à inércia do rotor), o ponto de operação eletromagnético do motor passa, instantaneamente, do ponto 1 (curva A) ao ponto 2 (curva B). Nessas circunstâncias, o motor exerce um conjugado negativo de, aproximadamente, -2,6 pu, conforme indica o ponto 2 da curva B. Esse conjugado frenante é somado ao conjugado de carga (0,6 pu ponto 1 da curva A), de modo que o conjugado total de frenagem seja nesse instante de -3,2 pu. Para essas condições, a velocidade diminui muito rapidamente devido ao elevado valor do conjugado frenante. À medida que a velocidade diminui, o conjugado exercido pelo motor diminui progressivamente, seguindo o trajeto da curva B. Atingindo a velocidade de 0,85 pu no ponto 3, o conjugado exercido pelo motor é nulo, mas a sua velocidade continua a diminuir rapidamente devido ao conjugado (0,6 pu) que está sendo imposto pela carga. Após o ponto 3, o motor desenvolve um conjugado positivo que aumenta progressivamente, até o momento em que se iguala ao da carga (ponto 4). Doravante, a velocidade permanece em 0,82 pu. Quando o intervalo de funcionamento passa do ponto 2 ao ponto 3, uma parte da

energia cinética do rotor e da carga é dissipada sobre um banco de resistores (frenagem reostática), porque durante esse intervalo, o motor funciona como gerador assíncrono.
V. CONCLUSÃO
Com o desenvolvimento do projeto dos acionamentos da ponte rolante, utilizando inversores de frequência, foi possível registrar uma economia de cerca de 50% no consumo de energia em relação a uma ponte rolante que utiliza motores de rotor bobinado. Esse fato deve-se a não utilização dos resistores de partida e motores de rotor bobinado e sim dos inversores de frequência. Outro fato extremamente importante foi o aumento do fator de potência, que neste caso, possui valor igual a 1,00, eliminando qualquer possibilidade de multa por parte da concessionária de energia, além de eliminar a necessidade de instalação de banco de capacitores para correção do fator de potência. Em pontes rolantes que utilizam motores de rotor bobinado, o valor do fator de potencia varia de 0,64 a 0,70. Os motores da ponte rolante são acionados eletronicamente acelerando e desacelerando a ponte rolante em rampa evitando solavancos e choques nos redutores, rodas e freios, conferindo maior durabilidade do conjunto mecânico. Os inversores de frequência aplicados no projeto da ponte rolante utilizam tecnologia de três níveis de controle, a qual reduz consideravelmente os picos de tensão sobre o motor, evitando o rompimento da isolação, reduzindo a corrente de circulação de terra que danificam os rolamentos e, consequentemente, reduzindo as interferências eletromagnéticas e ruídos audíveis. [3] Com a utilização da frenagem dinâmica dos inversores foi possível diminuir o desgaste das pastilhas de freio, já que o inversor de frequência freia o motor até a velocidade próxima de zero de forma eletrônica, sendo o freio utilizado somente para estacionamento, reduzindo drasticamente o consumo de pastilhas de freio. Com a utilização dos inversores de freqüência que trabalham com o método vetorial de fluxo, foi possível aumentar a segurança dos acionamentos do sistema de elevação da ponte rolante, por possuir o recurso de torque nominal com velocidade zero, isto quer dizer, mesmo com a falha dos freios o motor consegue segurar a carga máxima dos acionamentos de elevação. [3] Outro fator importante foi a eliminação de contatores, o que gerou menor desgaste e menos manutenção. Os contatores de controle de uma ponte rolante, que utiliza somente relés eletromecânicos no circuito de controle, possuem altos índices de desgaste, em virtude do elevado número de manobras por hora. Com a utilização do CLP e da rede industrial no projeto da ponte rolante não foi necessário a utilização de um número elevado de contatores de controle.
É importante ressaltar que a utilização de motores gaiola de esquilo em lugar de motores de rotor bobinado é mais vantajosa por não utilizarem escovas e porta escovas o que confere menor custo de manutenção em relação aos motores de rotor bobinado. Além desses benefícios, o sistema de automação utilizado na nova ponte rolante conseguiu espaçar a periodicidade de manutenção e diminuir o número de sobressalentes utilizados no processo, gerando uma significativa economia de custo. Na prática, a implantação do sistema de automação da nova ponte rolante facilitou o diagnóstico de manutenção. Agora é possível gerar gráficos, histórico de manutenção e relatórios com mais facilidade e, apesar de não conseguir mensurar valores, percebe-se que a preservação mecânica dos equipamentos é uma realidade. Com a partida mais suave e frenagem sem solavancos os ganhos são visíveis.
REFERÊNCIAS [1] SEELIG, F. S. Substituição dos Motores de Anéis por Motores
Standard Acionados por Inversores de Frequência em Sistemas de Içamento, disponível em: Revista Ciências Exatas – UNITAU – Vol. 2, N. 2, 2007.
[2] LUGLI, A. B. e SANTOS, M. M. D. Redes Industriais para Automação Industrial: AS-I, PROFIBUS e PROFINET. Editora Érica, São Paulo, 2010, 176p.
[3] FRANCHI, C. M. Inversores de Frequência – Teoria e Aplicações.
Editora Érica, São Paulo, 2009, 192p. [4] GASPARETO, R. Controle Vetorial do Motor de Indução.
Dissertação de Mestrado em Engenharia Elétrica da UFRGS, Porto Alegre, 2006, 67p.
[5] C. A LANGUI, Pontes rolantes – a Importância do Equipamento
nas Áreas de Produção Industrial. Monografia apresentada ao Departamento de Economia, Contabilidade, Administração e Secretariado da UNITAU, Taubaté, 2001, 54p.
[6] MAITELLI, A. L, et al. Um Sistema Supervisório para Elevação
Artificial de Petróleo. Artigo apresentado no Congresso Rio Oil&Gas, Natal, 2006, 7p. Disponível em: < http://www.dca.ufrn.br/~maitelli/FTP/artigos/RioOilGas_SISAL.pdf>. Acesso em: 01 abr. 2013.
[7] SILVA, A. M, Aplicação de Verificação de Modelos a Programas de
CLP. Dissertação de Mestrado em Engenharia Elétrica do IME, Rio de Janeiro, 2008, 121p.
[8] PRUDENTE, F. Automação Industrial – PLC: Programação e Instalação. Editora LTC, São Paulo, 2007, 364p.
[9] JURIZATO, L. A. e PEREIRA, P. S. R. Sistemas Supervisórios. Artigo
Técnico. Natal, 2002/2003, 105-114p. Disponível em: <http://centralmat.com.br/Artigos/Mais/sistemasSupervisorios.pdf>. Acesso em: 23 fev. 2013.
[10] MARQUES, G. Controle de Motores Elétricos. Apostila técnica,
Natal, 2007, 287p. Disponível em: < https://dspace.ist.utl.pt/bitstream/2295/133033/1/CME%25202007.pdf>. Acesso em: 23 jan. 2013.
[11] BARBI, I., Teoria Fundamental do Motor de Indução. Editora da
UFSC, Florianópolis, 1985, 100p.

[12] PAIVA, J. A., Controle Vetorial de Velocidade de Uma Maquina de Indução Sem Mancais Trifásica Com Bobinado Dividido Utilizando Estimação Neural de Fluxo. Tese de Doutorado submetida em Engenharia elétrica da UFRN, Natal, 2007, 152p.
[13] FERRARI, S. M., Identificação On-line de Motores de Indução
Através de modelo Discreto Para Sinal Senoidal. Dissertação de Mestrado em Engenharia Elétrica da UESC, Florianópolis, 2006, 177p.
Leonardo Jose Domingos da Costa nasceu em Volta Redonda, RJ, em 23 de julho de 1984. Possui os títulos: Técnico em Telecomunicações (ICT', 2002), Engenheiro Eletricista com ênfase em Eletrônica (AEDB, 2009). Desde março de 2010 é Engenheiro de Manutenção na Companhia Siderúrgica Nacional, onde trabalha com projeto e manutenção de equipamentos de elevação de carga (Pontes Rolantes) com capacidade de 5T a 300T.





























