Embed Size (px)
Citation preview

ATA’s Nanoradian-ClassATA’s Nanoradian-ClassRotational SensorsRotational Sensors
10 November 2009

Use or disclosure of this sheet is subject to the restriction on the title page of this document.
ATA OverviewATA Overview
• Awards and Distinctions– 2008 Minority Manufacturer of the Year
– 2004 SBA National Prime Contractor of the Year
– 2005 NM Innovator of the Year
– USAF Small Business R&D Awards
– SBA Administrator’s Award
– Multiple Patented Technologies
• Operating Sites in New Mexico– ATA 1300 Britt Street, Albuquerque, NM
Headquarters– Kirtland AFB – AFRL and Big Crow
Support Sites– North Oscura Peak, WSMR AFRL Laser
Test Facility– Las Cruces, NM WSMR Support Site
• Founded 1975 A-TECH Corporation, d.b.a. Applied Technology Associates
• Customers Include USAF, Sandia NL, US Army, MDA, NASA, US Navy, and Aerospace and Defense Companies
• Approximately 250 Employees
ATA is an Established Technology Company with a Proven Track RecordATA is an Established Technology Company with a Proven Track Record
2

Use or disclosure of this sheet is subject to the restriction on the title page of this document.
• ISO-9001 Certified• Class 10,000 Clean Room• Approved Vendor
– Ball Aerospace– Lockheed Martin– Boeing– Raytheon
• Produced Space Qualified Hardware– Lockheed Martin– Boeing– Raytheon– Sandia National Laboratories
ATA Overview Cont’dATA Overview Cont’d
Raytheon
3

Use or disclosure of this sheet is subject to the restriction on the title page of this document. 4
• ATA has a history of inventing sensors in response to customer requests or internally identified needs
Overview Overview

Use or disclosure of this sheet is subject to the restriction on the title page of this document.
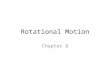
MHD ARS Sensing Concept
• The MHD concept resulted from an Air Force request for alternate angular sensing techniques
AngularVelocity(rad/ s)
SensitiveAxis
ElectricField
RelativeVelocity
ElectrodeAreas
ConductingFluid
MagneticFlux
Density
PermanentMagnet
VoltageOutput
Proportionalto Angular
Rate
B
E
SN
w
+
-
Uq
MHD SensorMHD Sensor
High PerformanceHigh Bandwidth: > 1,000 HzLow Noise Floor: <100 nrad NEA (1-1kHz)High Dynamic Range: > 100 dBLow Cross-Axis Sensitivity
Simple DesignSmall Size: 1.0 x 1.0 x 1.3”Low Weight: 100 gramsLow Power: < 0.3 WattsRugged Design: > 1,000 g

Use or disclosure of this sheet is subject to the restriction on the title page of this document.
Augmenting Sensors with Augmenting Sensors with Other TechnologiesOther Technologies
• Radiation-tolerant design (100Krad environment)
• ATA designed and implemented FPGA processing architecture, collaborated in board design
6

Use or disclosure of this sheet is subject to the restriction on the title page of this document. 7
Microradian-Class Testing Microradian-Class Testing
• ATA has developed test facilities and techniques suitable for a range of motion profiles

Use or disclosure of this sheet is subject to the restriction on the title page of this document.
ARS Specifications
Model ARS-06 ARS-15 ARS-14 ARS-24
Range +200 rad/s +10 rad/s +0.5 rad/s +0.005 rad/s
Scale Factor 50mv/rad/s 1 V/rad/s 20 V/rad/s 2120 V/rad/s
-3dB Bandwidth 0.4 - 1kHz 4 – 1kHz 1 – 1 kHz 1 – 675 Hz
Rate Noise, 1-1kHz 4.7 mrad/s 27 μrad/s 5 μrad/s 1 μrad/s
Displ. Noise, 1-1kHz 50 μrad 0.8 μrad 50 nrad 8 nrad
Dimensions (inches) 0.7 x 1 0.8 x 0.8 x 1.2 1 x 1.3 x 2.9 2 x 2 x 4
Mass (grams) 35 60 200 2000

Use or disclosure of this sheet is subject to the restriction on the title page of this document.
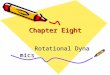
Frequency Response Magnitude
ATA MHD ARS Frequency Response Magnitude(FR Magnitude quoted at 10 Hz)
-50.00
-40.00
-30.00
-20.00
-10.00
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
0.1 1.0 10.0 100.0 1000.0
Frequency (Hz)
FR
Mag
(d
B r
ef 1
V/r
ad
/s)
ARS-06 (0.05 V/rad/s)
ARS-15 (1 V/rad/s)
ARS-14 (20 V/rad/s)
ARS-24 (2120 V/rad/s)

Use or disclosure of this sheet is subject to the restriction on the title page of this document.
Frequency Response Phase
ATA MHD ARS Frequency Response Phase
-180.00
-90.00
0.00
90.00
180.00
0.1 1.0 10.0 100.0 1000.0
Frequency (Hz)
Ph
ase
(deg
rees
)

Use or disclosure of this sheet is subject to the restriction on the title page of this document.
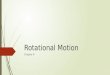
Rate Noise
ATA MHD ARS Rate Noise(Noise quoted from 1-1000 Hz)
1.0E-16
1.0E-15
1.0E-14
1.0E-13
1.0E-12
1.0E-11
1.0E-10
1.0E-09
1.0E-08
1.0E-07
1.0E-06
0.1 1.0 10.0 100.0 1000.0
Frequency (Hz)
(Rad
/s)2
/Hz
ARS-06 (4.67 mrad/s RMS)
ATA MHD ARS Displacement Noise(Noise quoted from 1-1000 Hz)
1.0E-24
1.0E-23
1.0E-22
1.0E-21
1.0E-20
1.0E-19
1.0E-18
1.0E-17
1.0E-16
1.0E-15
1.0E-14
1.0E-13
1.0E-12
1.0E-11
1.0E-10
1.0E-09
1.0E-08
1.0E-07
1.0E-06
0.1 1.0 10.0 100.0 1000.0
Frequency (Hz)
(Rad
)2/H
z
ARS-15 (26.6 μrad/s RMS)
ARS-14 (2.84 μrad/s RMS)
ARS-24 (0.36 μrad/s RMS)

Use or disclosure of this sheet is subject to the restriction on the title page of this document.
Displacement Noise
ATA MHD ARS Displacement Noise(Noise quoted from 1-1000 Hz)
1.0E-24
1.0E-23
1.0E-22
1.0E-21
1.0E-20
1.0E-19
1.0E-18
1.0E-17
1.0E-16
1.0E-15
1.0E-14
1.0E-13
1.0E-12
1.0E-11
1.0E-10
1.0E-09
1.0E-08
1.0E-07
1.0E-06
0.1 1.0 10.0 100.0 1000.0
Frequency (Hz)
(Rad
)2/H
z
ARS-06 (50 μrad RMS)
ARS-15 (0.8 μrad RMS)
ARS-14 (40 nrad RMS)
ARS-24 (5 nrad RMS)

Use or disclosure of this sheet is subject to the restriction on the title page of this document. 13
• These radiation hardened DC accelerometer units can measure microradian-level tilts in the presence of strong background acceleration (0.25g rms +).
0.1 0.1 μμG AccelerometerG Accelerometer
Dennis

Use or disclosure of this sheet is subject to the restriction on the title page of this document.
Seismically Stable Platform Tilt Sensor (1990)
Noise-174 dB rad
Corner6.9 mHz

Use or disclosure of this sheet is subject to the restriction on the title page of this document.
Northfinder
• Current effort underway to develop a 1 mrad Northfinder
• Based on modulating earth rate onto the ARS-14 by rotating a horizontal sensor in the earth’s rotation field