Embed Size (px)
DESCRIPTION
ASU 101 Introduction to Robotics and Robotics Programming. Yinong Chen. SCI Faculty in Robotics Computing. Chitta Baral : AI, Autonomous agents, cognitive robotics Subbarao Kambhampati : AI, Automated planning, Machine learning Pat Langley : AI, machine learning - PowerPoint PPT Presentation
Citation preview
1
Y Chen
101
04/19/23
ASU 101Introduction to Robotics and Robotics Programming
Yinong Chen
2
Y Chen
101
04/19/23
SCI Faculty in Robotics Computing Chitta Baral: AI, Autonomous agents, cognitive robotics Subbarao Kambhampati: AI, Automated planning,
Machine learning Pat Langley: AI, machine learning Yann-Hang Lee: Real-time, embedded systems W.T. Tsai: Service-oriented robotic computing Sarma Vrudhula: Embedded systems, power management Sandeep Gupta: Mobile computing, wireless and embedded
sensor networks Huan Liu: Machine learning, AI, Social computing Arunabha Sen: Wireless and mobile networks Winslow Burleson: Human-Computer Interaction Baoxin Li: Computer vision Jieping Ye: Machine learning Dirk Colbry: Robotics, Cognitive science, AI Yinong Chen: Robotics education
3
Y Chen
101
04/19/23
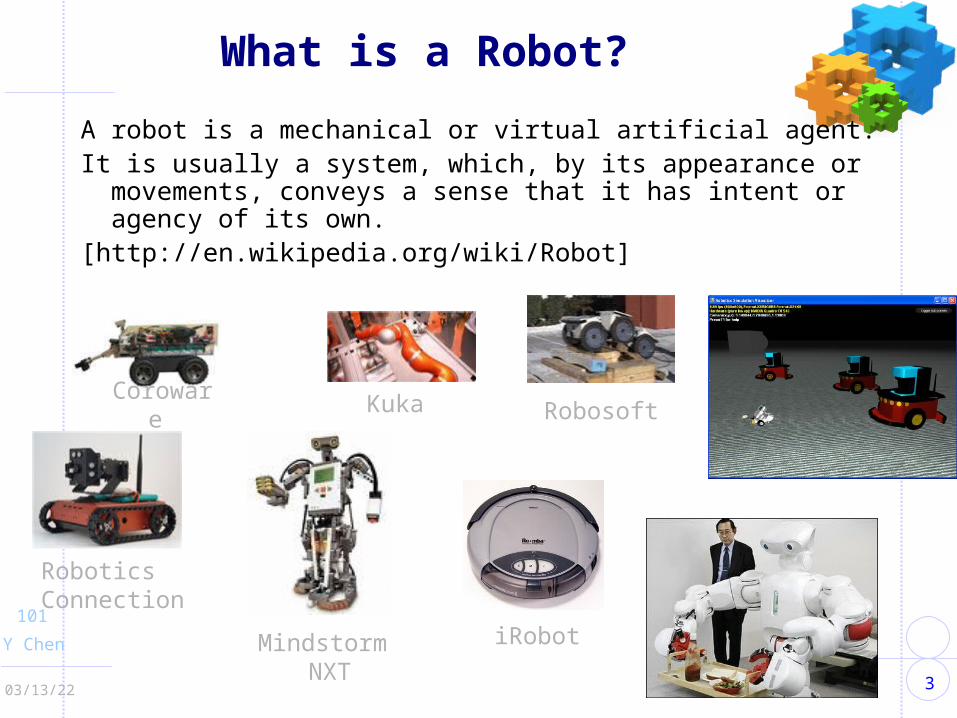
What is a Robot?
A robot is a mechanical or virtual artificial agent. It is usually a system, which, by its appearance or movements,
conveys a sense that it has intent or agency of its own. [http://en.wikipedia.org/wiki/Robot]
Coroware Kuka Robosoft
RoboticsConnection
Mindstorm NXT
iRobot
4
Y Chen
101
04/19/23
What is a Robot?
Many devices with varying degrees of autonomy are called robots.
Many different definitions for robots exist.
Some consider machines wholly controlled by an operator to be robots.
Others require a machine be easily reprogrammable.

5
Y Chen
101
04/19/23
Robot Classes
Manipulators: robotic arms. These are most commonly found in industrial settings.
Mobile Robots: unmanned vehicles capable of locomotion.
Hybrid Robots: mobile robots with manipulators.
6
Y Chen
101
04/19/23
Robot Components
Body Effectors Actuators Sensors Computer hardware Computer software Networking and communication
7
Y Chen
101
04/19/23
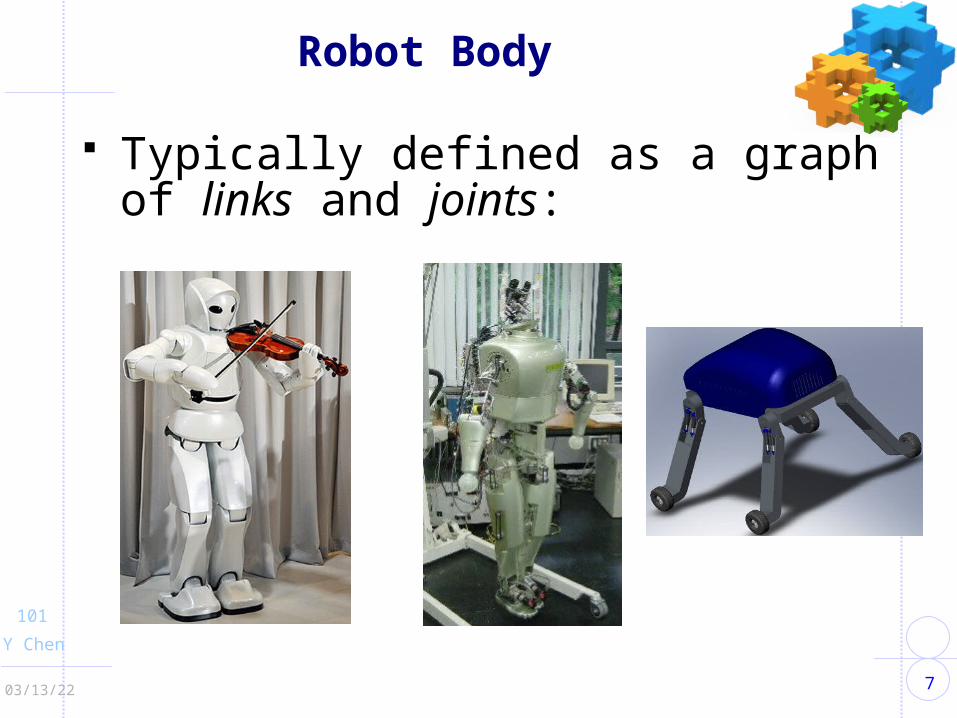
Robot Body
Typically defined as a graph of links and joints:
8
Y Chen
101
04/19/23
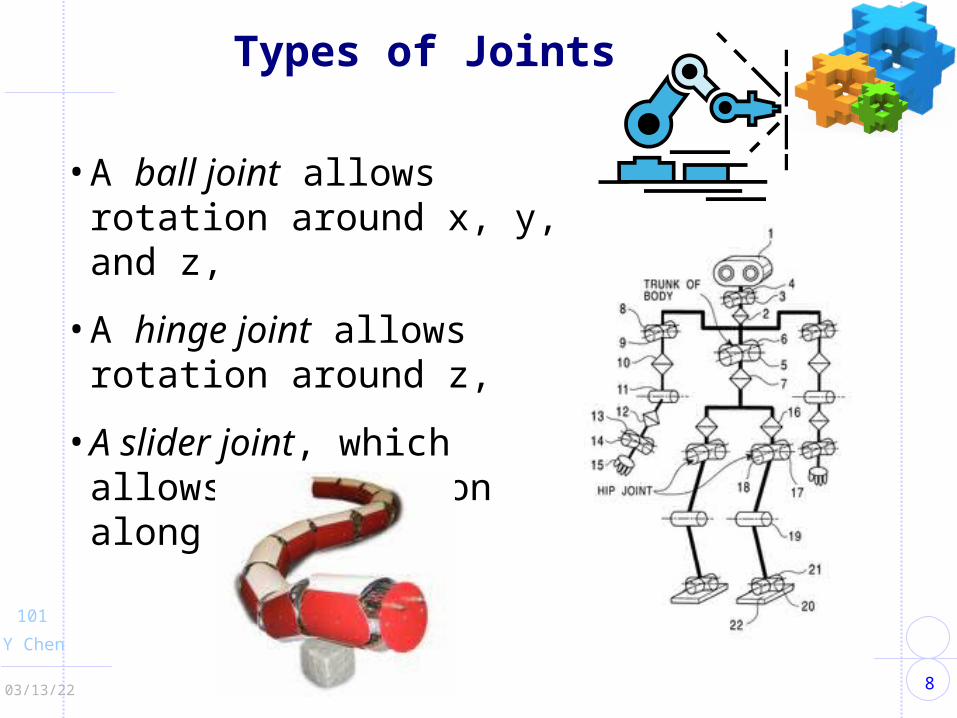
Types of Joints
• A ball joint allows rotation around x, y, and z,
• A hinge joint allows rotation around z,
• A slider joint, which allows translation along x.
9
Y Chen
101
04/19/23
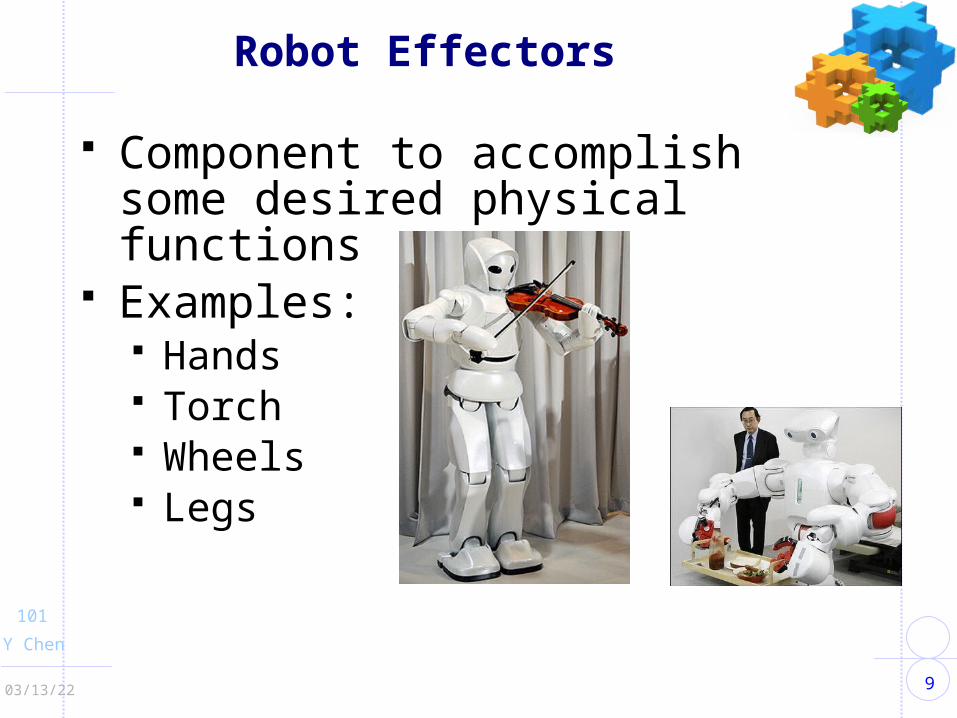
Robot Effectors
Component to accomplish some desired physical functions
Examples: Hands Torch Wheels Legs

10
Y Chen
101
04/19/23
Roomba Effectors
11
Y Chen
101
04/19/23
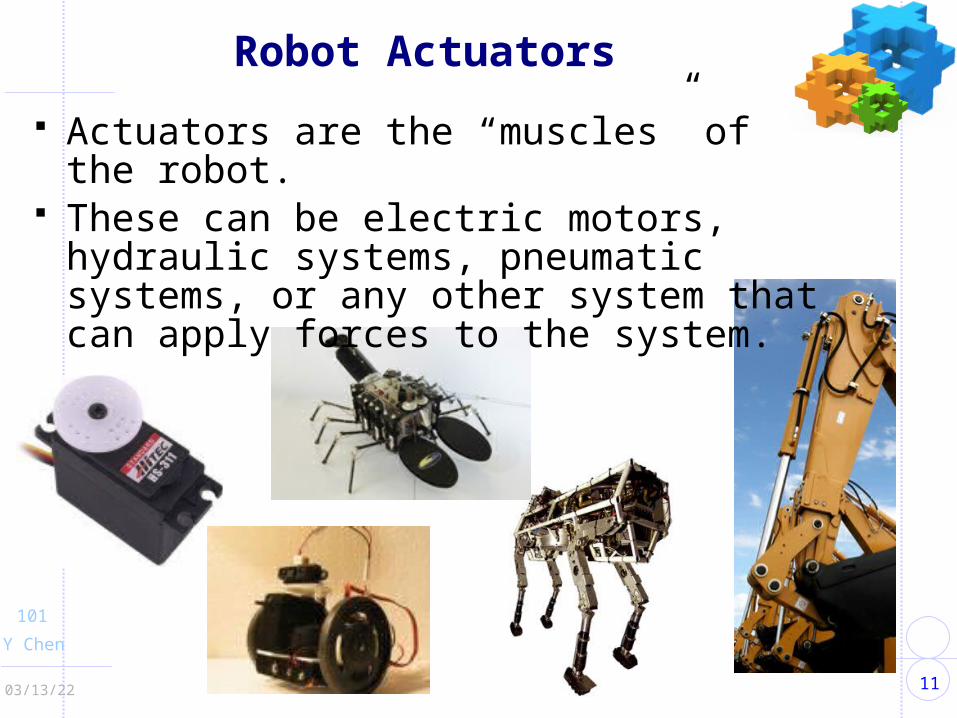
Robot Actuators
Actuators are the “muscles” of the robot. These can be electric motors, hydraulic
systems, pneumatic systems, or any other system that can apply forces to the system.
12
Y Chen
101
04/19/23
Robot Sensors
Sensors can be active or passive: Active – derive information from
environment’s reaction to robot’s actions, e.g. bumpers and sonar.
Passive – observers only, e.g. cameras and microphones .
13
Y Chen
101
04/19/23
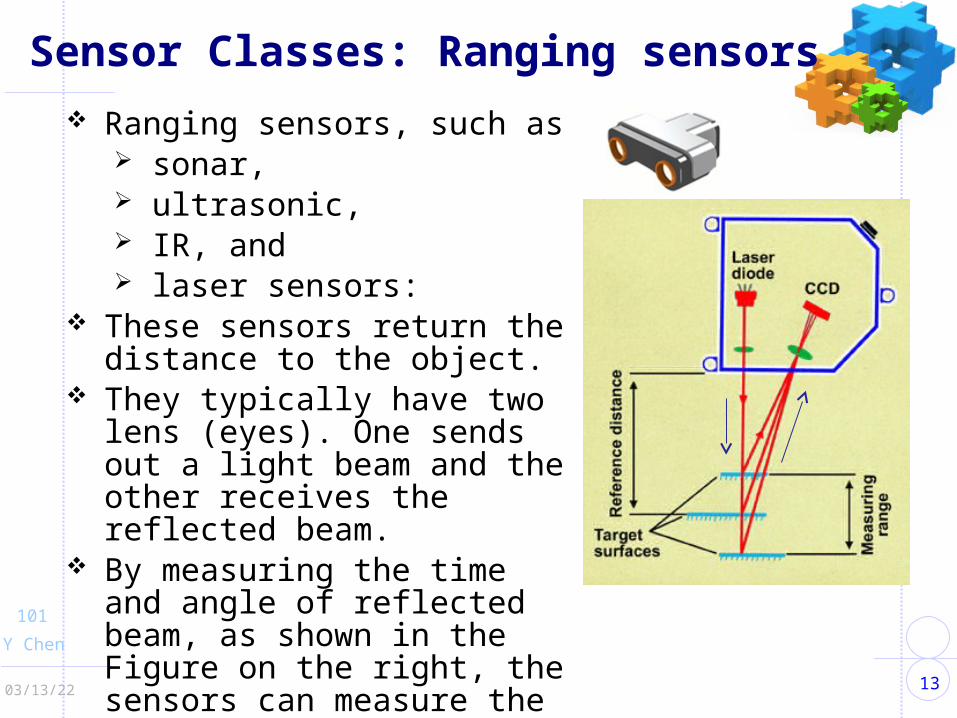
Sensor Classes: Ranging sensors
Ranging sensors, such as sonar, ultrasonic, IR, and laser sensors:
These sensors return the distance to the object.
They typically have two lens (eyes). One sends out a light beam and the other receives the reflected beam.
By measuring the time and angle of reflected beam, as shown in the Figure on the right, the sensors can measure the distance to the object
14
Y Chen
101
04/19/23
Sensor Classes: Other SensorsThere are many types of sensors
Contact (touch) sensor: A signal is generated when touched
Compass (magnetic) sensor GPS (Global Positioning System) Color sensor: return different value
for different colors Temperature sensor
Return the temperature Vehicle accelerometer sensor Vehicle tire pressure sensor …
15
Y Chen
101
04/19/23
Software Architecture for Robotics Computing
Robotics control methods include deliberative methods and reactive methods. Deliberative methods are model-driven and
involve planning before acting. Reactive methods is event-driven and
behavior must emerge from interaction. Hybrid architectures are software
architectures combining deliberative and reactive controllers.
16
Y Chen
101
04/19/23
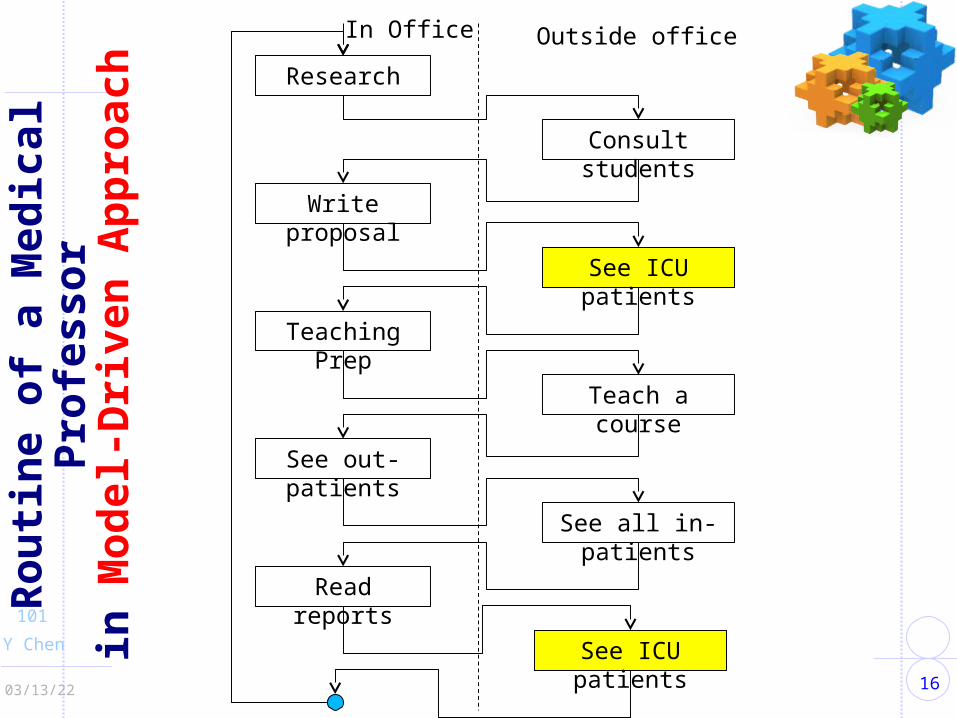
Rou
tin
e of
a M
edic
al P
rofe
ssor
in M
odel
-Dri
ven
Ap
pro
ach
Research
Write proposal
Consult students
Teaching Prep
See ICU patients
See out-patients
Teach a course
Read reports
See all in-patients
See ICU patients
Outside officeIn Office
17
Y Chen
101
04/19/23
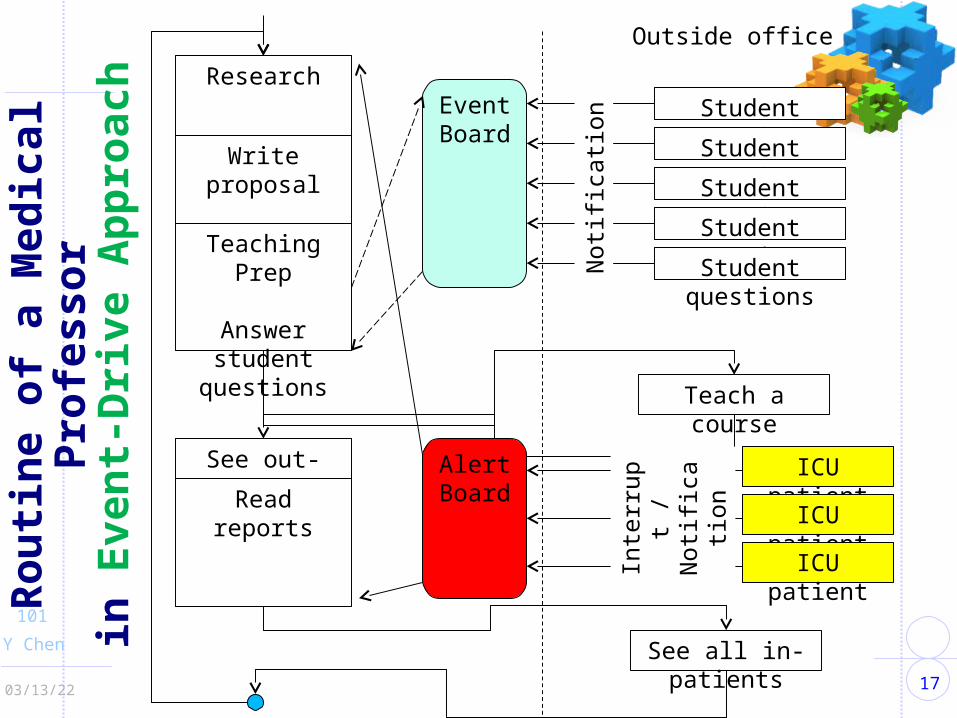
Rou
tin
e of
a M
edic
al P
rofe
ssor
in E
ven
t-D
rive
Ap
pro
ach
Research
Write proposal
Student questions
Teaching Prep
Answer student questions
ICU patient
Teach a course
See out-patients
Read reports
See all in-patients
Outside office
Event Board
Alert Board
ICU patient
ICU patient
Student questions
Student questions
Student questions
Student questions
Not
ific
atio
n
Inte
rrup
t /
Not
ific
atio
n
18
Y Chen
101
04/19/23
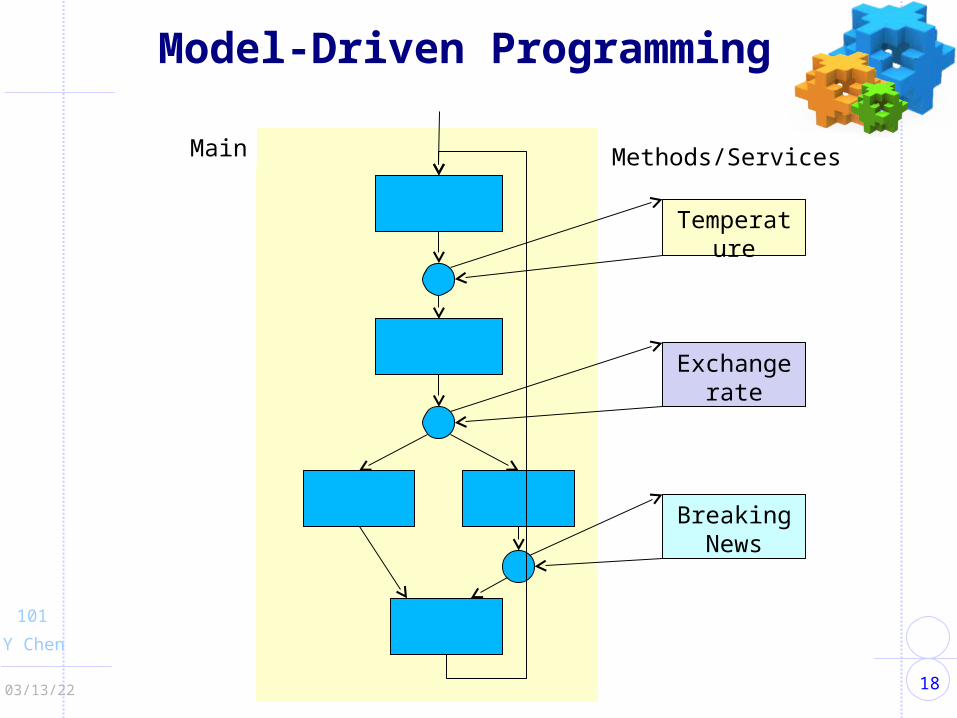
Model-Driven Programming
Main
Temperature
Breaking News
Exchange rate
Methods/Services
19
Y Chen
101
04/19/23
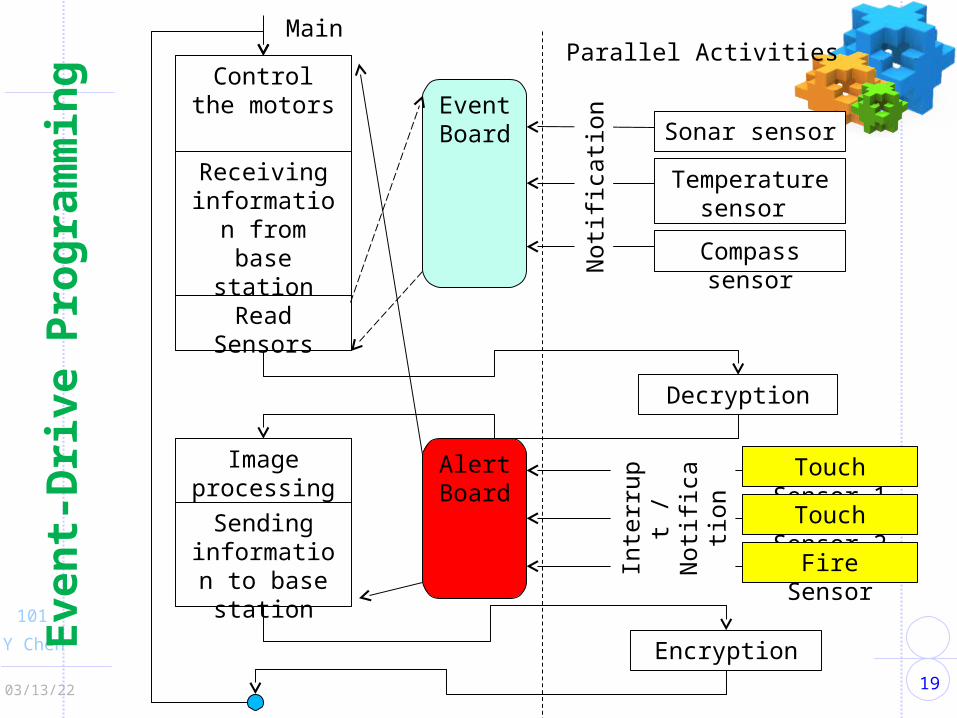
Eve
nt-
Dri
ve P
rogr
amm
ing
Control the motors
Receiving information from base
station
Sonar sensor
Read Sensors
Touch Sensor 1
Decryption
Image processing
Sending information to
base station
Encryption
Event Board
Alert Board
Touch Sensor 2
Fire Sensor
Temperature sensor
Compass sensor
Not
ific
atio
n
Inte
rrup
t /
Not
ific
atio
n
Parallel ActivitiesMain
20
Y Chen
101
04/19/23
Event-Driven Programming
In computer programming, event-driven programming is a programming paradigm which allows interactions between the computer program and the user or the environment;
The execution flow of the program is determined by • user actions, such as mouse clicks, key presses
in GUI programming!• sensor outputs (e.g., touch sensor, motion
sensor, etc.), and • messages from other programs
21
Y Chen
101
04/19/23
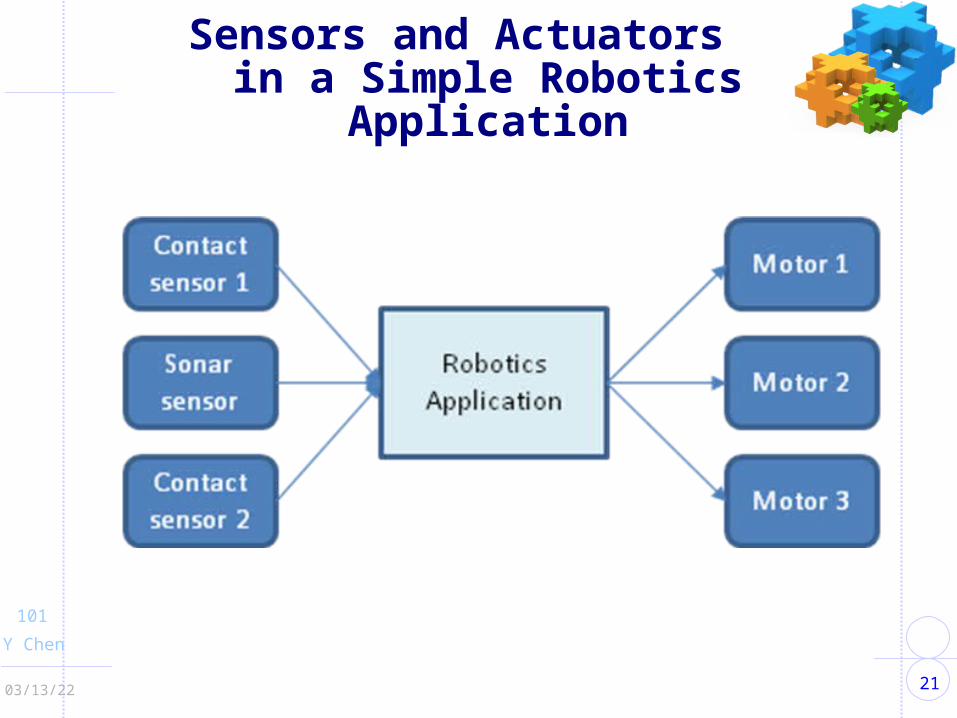
Sensors and Actuators in a Simple Robotics Application
22
Y Chen
101
04/19/23
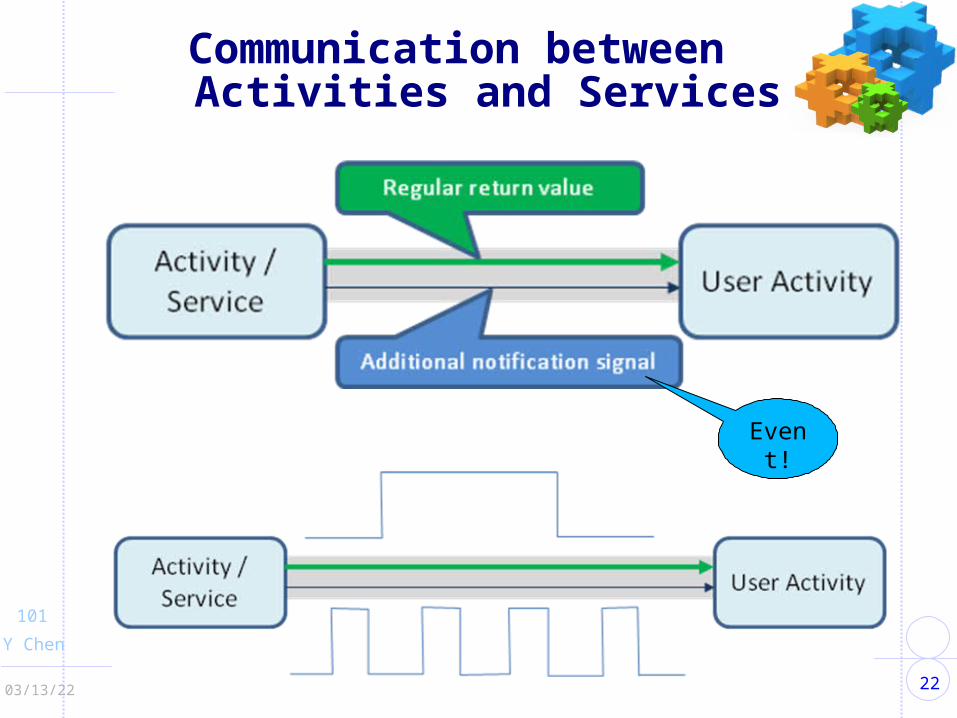
Communication between Activities and Services
Event!
23
Y Chen
101
04/19/23
Robot Ethics: Three Laws of Robotics
Isaac Asimov:1.A robot may not injure a human being or, through inaction, allow a human being to come to harm. 2.A robot must obey orders given to it by human beings, except where such orders would conflict with the First Law. 3.A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
24
Y Chen
101
04/19/23
Arizona Robotics ChallengeASU versus UoA
Floor plan learning2
1
Unmanned patrolling and object detection3
Intruder detection4
Other Security features, such as fire detection5
Remote commanded patrolling
http://asusrl.eas.asu.edu/srlab/Research/RoboticsChallenge.html
25
Y Chen
101
04/19/23
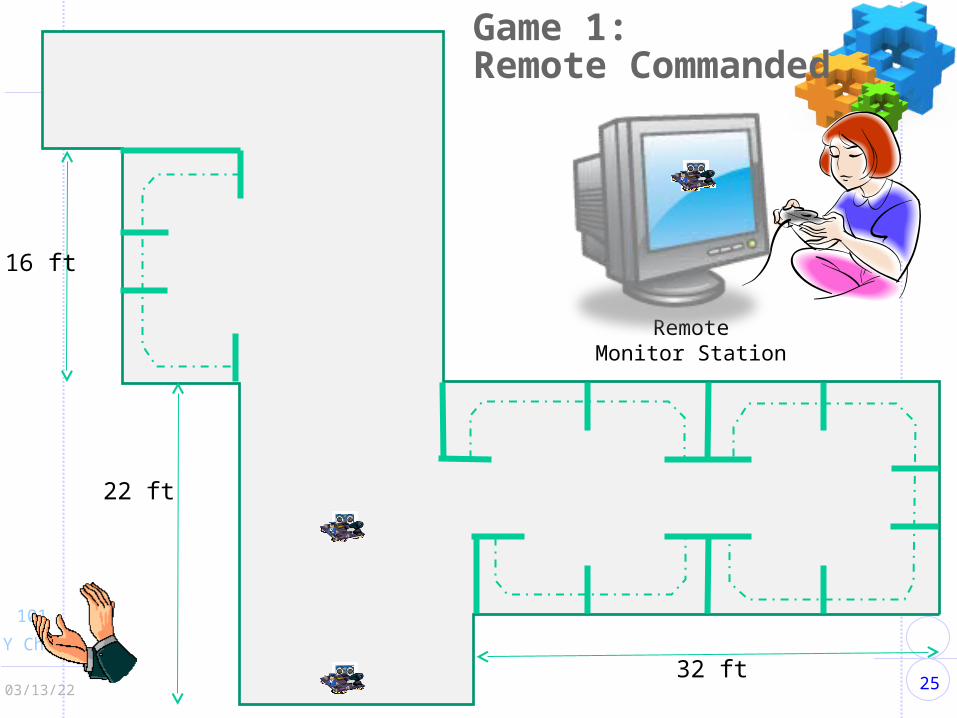
Game 1: Remote Commanded
32 ft
22 ft
16 ft
RemoteMonitor Station
26
Y Chen
101
04/19/23
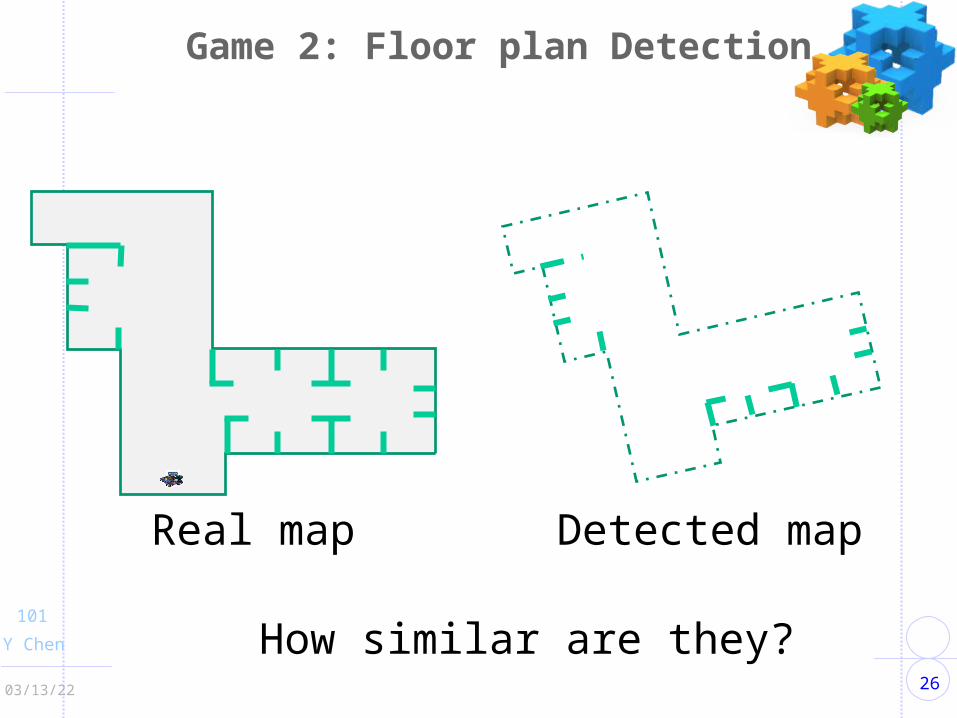
Game 2: Floor plan Detection
Real map Detected map
How similar are they?
27
Y Chen
101
04/19/23
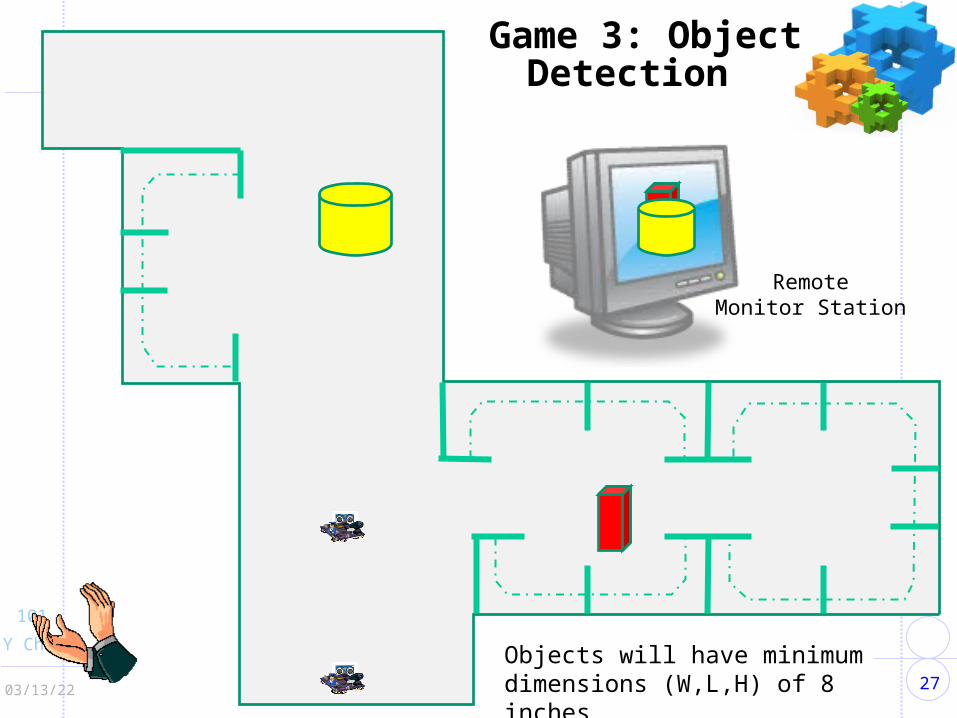
Game 3: Object Detection
RemoteMonitor Station
Objects will have minimum dimensions (W,L,H) of 8 inches
28
Y Chen
101
04/19/23
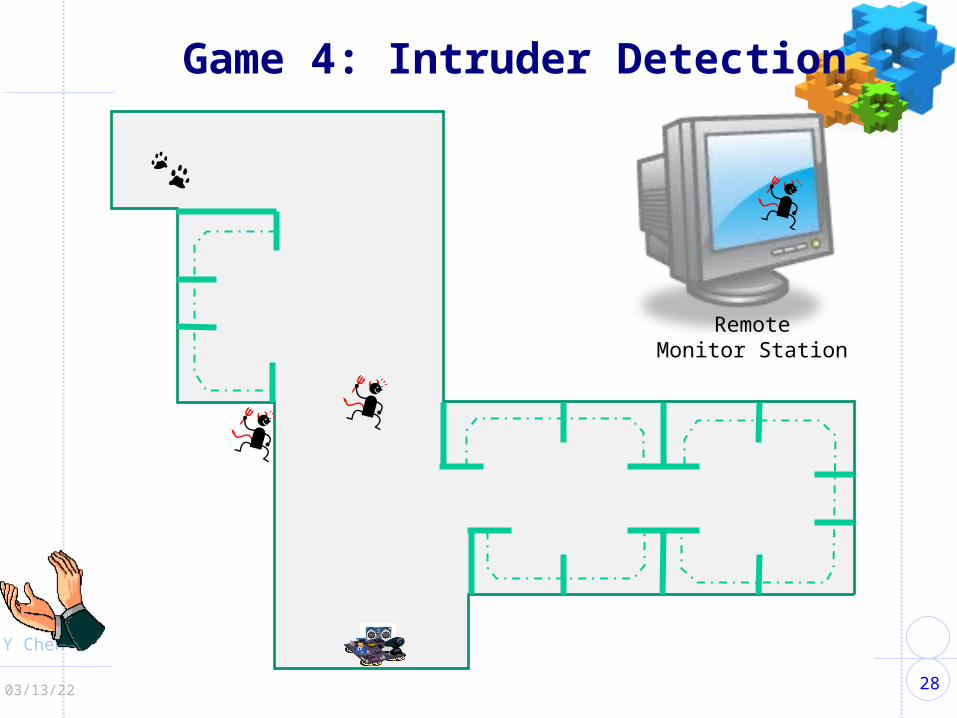
Game 4: Intruder Detection
RemoteMonitor Station
29
Y Chen
101
04/19/23
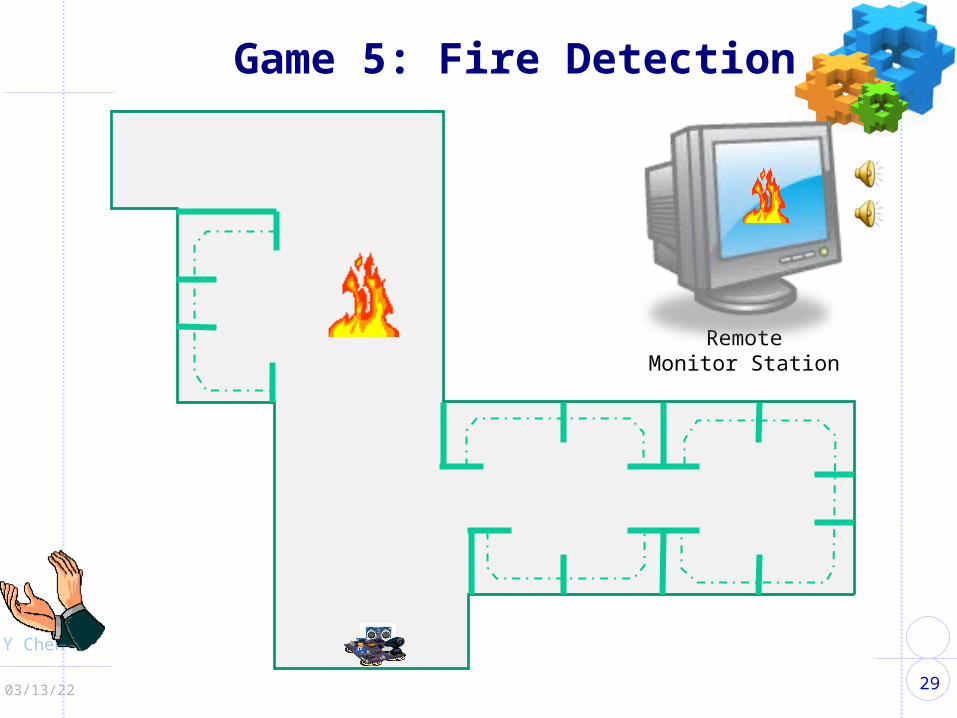
Game 5: Fire Detection
RemoteMonitor Station