-
8/10/2019 Assign4 Sol
1/5
Solution 4.1:
i) ( )n y is an odd memorylessnonlinear operator, so its
describing function is independent
of . We consider two cases for the amplitude, a, of the
sinusoidal input ras follow,
and compute the first harmonic of the steady-state part of
n(r)
Let denote t . If 1a then3
3 33 3 2
33 1 34 2( ( )) sin sin ( )sin sin 3 ( )
2 4 2 4 2 4
a aa a a a
n r t a a aa
+= + = + = = +
If 1a> then
/21 3 3
0 0
/21 3 1
2 2
1
2 2 2
1 4 4sin : ( ) ( sin )sin ( sin sin )sin
2
1 4 1 1 1 1 3 1 1 1(2sin )sin sin 1 sin 1
2 2 2 2 8 2
1 1 2 1 1 11 (1 ) sin 1
8 2
aa n a d a d
a a a
ad a
a a a a a a a
aa a a a a a
= = = +
= +
+ +
2
2 1
2
1 11
2
1 1 1( ) (3 6)sin 3 1 4
2
a
a a aa a
= +
ii) ( )n x represents a hysteresis nonlinear operator which is
not memoryless, thus its
describing function may depend on the frequency . However,
through laborious but
routine calculations, it can be verified that ( )a is
independent of and complex
indeed! In this case, if the input amplitude is less than , the
output is simply equal to
zero
( ) 0a if a =
If the input amplitude a exceeds , then the steady-state output
is described by
sin ,0 / 2
( ) , / 2( ) sin , 3 / 2
( ) ,3 / 2 2
sin ,2 2
ss
ma m
m az t ma m
m a
ma m
= +
where (0, / 2) be the unique number such that
2sin 1
a
=
88-87
:9/9/87
:
-
8/10/2019 Assign4 Sol
2/5
and let denote t for convenience. After some character-building
computations, one
finds that if a , then( )
re ima j = +
where
1 22 2 2( ) sin ( 1) ( 1) 1 ( 1)2
4( ) ( 1)
re
im
ma
a a a
ma
a a
=
=
You may also see Slotine (1991) or Vidyasagar (1993) for more
detailed discussions.
Solution 4.2:
First we recall a few interesting points about the describing
function of the hysteresis
nonlinearity in Exercise 4.1 part (ii) for 1m= = (See Slotine
(1991), figures 5.17 and5.18)
1. ( ) 0 12. ( ) 1 1/ 0
a if aa as a
= =
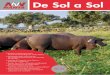
and furthermore ( )a increases, when 1/ a decreases. Now, we
plot the Nyquist diagram
of )(sG and the graph of1
( )a for 0a (See Fig. 1). One can see that the two plots
intersect at two points
1 2: ( 6.49, 30) : ( 1.02, 0.0766)L L
Fig. 1. Plots of )( jG and)(
1
a in Exercise 4.2
Two intersections and two limit cycles! However, note that one
of them occurs at a
negative frequency which does not correspond to any other
positive one!! This situation
arises due to the complexity of the given describing function.
Now you can graphically find
the approximate frequency and amplitude corresponding to each
limit cycle
1 2
1.025 16.34: :
1.33 / 7.38 /
a aL L
rad s rad s
-
8/10/2019 Assign4 Sol
3/5
Hence, we predict two limit cycles: one at an angular frequency
of 1.33 rad/sec and
amplitude of 1.025 (L1), and another at an angular frequency of
-7.38 rad/sec and amplitude
of 16.34 (L2). See Fig. 2 which depicts these two L.C.,
separately.
About the stability of L1, since it passes through the stable
region to the unstable one while
the amplitude, a, is increasing, thus L1 is an unstable L.C.
Similarly, you can analyze the
stability of L2. Does it go form the stable region to the
unstable one?!
Fig. 2. Two nontrivial limit cycles in Exercise 4.2
Solution 4.3:
First we can change the feedback system to the following
form
Fig. 3. Position servo mechanism after composition of the two
nonlinearities
Note that
It is straightforward to show that the describing function for
the nonlinearity in Fig. 3 (relay
with a dead-zone a ) is given by
2
2
0
( ) 41
a
aa
a a
-
8/10/2019 Assign4 Sol
4/5
2( )a
=
The Nyquist curve of )( jG crosses the negative real axis at 2=o
, 0Im( ( )) 0G j = ,
for which 3/2)( =ojG (See Fig. 4). Thus, we should expect no
oscillations if
4
3 >
Fig. 4. Nyquist curve of )( jG in Exercise 4.3
Solution 4.4:
The nonlinear system 2 ( ) 0x x px q x x+ + + = can be
represented in the state space form
as follows
1 2
2 2 1 1 22 ( )
x x
x x px q x x
=
= + +
This can be rewritten as
1 2
2 1 2
1 2
3
2 ( )
( ) / 2
x x
x px x qu
y x x
u y y y
= = = + = =
The first part of this model, which has been asterisked, is a
linear SISO system in which
[ ]
0 1 0
2
1 1
X X up q
y X
= +
=
and the corresponding transfer function is2
( )2
qs qG s
s s p
=
+ +.
Consequently, the given system can be put into the closed loop
system shown in Fig. 5.
Now, it is sufficient to compute the describing function for the
nonlinearity ( ) and also
the frequency response of ( )G s , to investigate the possible
existence of periodic solutions.
3 3 33 23 3( sin ) sin sin ( )sin sin 3 ( ) 1
2 8 8 8
a a aa t a t t a t t a a = + = + = +
-
8/10/2019 Assign4 Sol
5/5
Fig. 5. The closed loop system in Exercise 4.4
The frequency response of the linear part of the closed loop
system is indicated by
( )2 2 2 2 2( ) 2 ( ) ( ) 4 ( )G j q p p j f f p = + = +
Clearly, is always Re( ) 0G and Im( ) 0G = has a nonzero
solution equal to 2p= if
2p> . Therefore, the Nyquist diagram of ( )G j will exhibit
one of the two different
general forms, which have been shown in Fig. 6, according to the
value of p .
Fig. 6. Nyquist diagram of )( jG in Exercise 4.4 for (a) 2p<
and (b) 2p>
Note:If 2p> then 2p= is the real axis crossover frequency and
by replacing it into
the real part of ( )G j we have Re( )2
qG = . Moreover,
q
p is the value of ( 0)G j .
Here, ( )a is real function and clearly, its negative inverse is
bounded via
1 1 ( ) 0a < < . Thus, according to Fig. 6 only in the
second case where 2p> , it is
possible to have a nontrivial periodic solution with a nonzero
frequency. This limit cycle
occurs at the intersection of ( )G j and 1 ( )a on the negative
real axis in Fig. 6 (b).
In other words, if 1 22
qq < < and 2p> , we may predict a periodic solution at
an
angular velocity of 2p= and an amplitude which is the positive
solution to the
following equation
2
1 8 2( 1)
3 2 31
8
qa
qa
= = +
Note that this L.C. is unstable. What about the intersection at
0= ?!Good Luck