-
8/6/2019 Article Antarctic Are Viewed
1/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
1
An Imaging HF GPR using Stationary Antennas:
Experimental Validation over the Antarctic Ice SheetAlice Le
Gall, Valrie Ciarletti, Jean-Jacques Berthelier, Alain Reineix,
Christophe Guiffaut, Richard Ney,
Franois Dolon, Sbastien Bonaim
Abstract Ground penetrating radars (GPR) are commonlyused on the
Earth to probe the subsurface and the moderatemass and power
resources they require make them a most usefultool in planetary
exploration. In most cases, GPR need to bemoved and perform
soundings at various locations to retrievethe image of the
underground layers or reflectors. Yet, TAPIR(Terrestrial And
Planetary Imaging Radar) is an innovativestationary HF GPR that
allows to image the reflectors in thesubsurface through the
processing of measured electric andmagnetic components of the
reflected waves. This instrumentwas originally developed in the
frame of the NetLander project
to perform deep soundings of the Martian subsurface and hasbeen
tested during a validation campaign on the Antarctic icesheet.
Combining the corresponding observations and numericalsimulations
of the operation of the instrument we demonstrateits imaging
capability and evaluate its performances.
Index Terms Ground Penetrating Radar, deep soundings,subsurface,
wave propagation, FDTD, ice, Mars
I. INTRODUCTION
Imaging underground layers and reflectors with ground
penetrating radars (GPR) is usually achieved by performing
soundings from a number of positions. These positions may
be either disposed along an approximately linear 1D path
over
the surface to provide underground profiles over long
distancesor organized in a 2D network over the surface to provide
3-D
profiles of the subsurface in a more restricted volume
beneath
the surface. However, even on Earth, moving a GPR and its
antennas over complex terrain may be difficult (especially
when operating at frequencies in the order of magnitude of
a few MHz, when the size of the antenna exceeds tens of
meters) while it is readily impossible in the case of
planetary
subsurface exploration from stationary landers. Our
objective
was thus to develop an innovative GPR with imaging
capability
that could be used from a stationary position.
This work was initially performed in the frame of the former
NetLander project lead by CNES that aimed at exploring
the subsurface and deep interior of Mars. This project calledfor
landing 4 small geophysical stations spaced in longitudeand at low
latitudes, each of these landers including a GPR.
A major goal of the radar was to search for liquid water
reservoirs that, according to geological models of Mars [14]
[37], may be found at kilometric depths. An HF frequency
of operation was thus selected; it allows to reach such
large
depths on Mars due to the low moisture content of the soil.
To overcome the problem faced by a stationary instrument,
an innovative imaging technique was proposed [8] [9]. Such
a radar may also be of great interest on Earth, for example
to probe the Antarctic ice cap and to map the bedrock at
depths of hundreds to thousands of meters. A slightly
enhanced
version of the NetLander radar called TAPIR (Terrestrial And
Planetary Imaging Radar) was thus developed to be operated
in
the RANETA (RAdar of NEtlander in Terre Adlie) validation
campaign in Antarctica [10].
In this paper we present the method for local subsurface
imaging based on the processing of GPR pulses emitted from
a set of stationary antennas and use the data obtained in
the
Antarctic to validate the concept of the radar and
demonstrate
its performances. We postpone to a further paper the
"geolog-ical" analysis of the results to retrieve detailed
information on
the topographic features of the bedrock. In the present stage
of
our work, sounding the Antarctic bedrock has the advantage
of
providing a simplified geologic target which helps in
validating
the principle of operation and data processing in a natural
environment devoid of too much complexity. As described in
the above mentioned references, the use of stationary
antennas
to image a conical volume beneath the radar requires the
ability
to resolve the parameters that determine the direction,
range
and amplitude of the returning signals. A similar objective
was
pursued by Moran et al. but using a different techniques
based
on the use of a subset of antennas. In our case we only use
two crossed dipoles for transmission and reception as well asa
magnetic antenna that provides the 3 magnetic componentsof the
reflected waves. Our first objective is to resolve from
these data the range and direction of the returning waves
that
provide the depth and inclination of the facets of the
bedrock
that reflects or diffract the transmitted waves. Our
experimental
work was backed by numerical simulations using a FDTD code
that helps in interpreting and validating the field
observations.
Section II is devoted to a brief description of TAPIR,
its modes of operation and the RANETA campaign. The
description of the test sites is given in section III. We
describe
the data processing method in section IV and the analysis of
several soundings is presented in section V. A discussion of
the results and some indications of future works are given inthe
last section (section VI).
I I . DESCRIPTION OF TAPIR
A. Instrument Description
The detailed description of the instrument and of its
princi-
ple of operation can be found in [9] and [13]. They are
briefly
reviewed in this section.
1) Principle of the GPR: The TAPIR is an impulse polari-
metric ground penetrating radar. It was specifically
designed
for large penetration depths of more than 1km. The radar
-
8/6/2019 Article Antarctic Are Viewed
2/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
2
operates in the HF range at low frequencies, from 2 to 6MHz.The
pulse lengths can be varied to optimize the sounding
of the subsurface at different depths. The shortest pulses
are
0.5s long, corresponding to a range resolution of 60meters and a
blind zone of 70 meters. The longest pulsesare BPSK coded 10s
pulses to probe the underground atthe largest possible depth,
beyond 1km on Mars. In order to
reduce interferences and ambiant noise, a bi-phasing scheme
with alternated polarities of the transmitted waveforms is
used
at transmission. To increase the radar sensitivity, coherent
additions, up to 224, are performed.Since the NetLander GPR was
to operate from a fixed lander
in a mono-static mode, it was not possible to rely on the
usual mode of operation of ground penetrating radars while
obtains depth profiles by making a series of soundings over
a
network of positions [4] [28] [12] [40]. Our GPR provides a
simplified imaging of the subsurface reflectors by measuring
not only the propagation delay but also the direction of
arrival
of the reflected waves in order to determine both the
distance
and the orientation of the reflectors. This innovative
concept
derives the direction of the propagation vector of the
returningwave from the measured values of 5 components of the
wavefield: 2 horizontal electric components and the 3
magneticcomponents.
The GPR was thus equipped with two horizontal electrical
dipoles, orthogonal to each other, and a magnetic antenna
that
could be oriented along 3 mutually orthogonal directions.
Each
electrical antenna consists of two colinearly opposed 35m
longresistively loaded quarter-wave monopoles [39] with a
resistive
profile [22]. These antennas offer a broad enough frequency
bandwidth to allow the transmission of short pulses without
significant distortion except maybe off axis as shown by
[2].
They are laid on the surface along directions that will be
taken as the horizontal (Ox) and (Oy) axes with (Oz) beingthe
ascending vertical axis (see figure 1). They are made of
simple isolated copper wires of 1mm in diameter. Giventhis
dimension the antennas cannot be shielded and so surface
clutter cannot be avoided. The radiating characteristics are
presented in the following section. The magnetic antenna is
a HF search coil with a central frequency of 3MHz and a 2MHz
bandwidth at 3dB. The ability of using the two electricantennas to
transmit and to receive allows full polarimetric
measurements, a capability of great interest because waves
reflected from inclined and/or rough interfaces or discrete
reflectors will be subject to depolarisation. Polarimetric
data
bring useful information on the geometrical properties of
the
reflectors.In addition to the normal mono-static radar mode of
op-
eration, several other modes were anticipated on the Net-
Lander mission. In particular, one mode was dedicated to the
determination of the frequency dependance of the antenna
impedance by measuring the current flowing through the
electric antenna for several CW signals at different
frequencies.
This impedance depends on the electromagnetic
characteristics
of the shallow subsurface. In a passive mode, the antenna
can
also be used to measure the HF radio-electric ambient noise
and detect EM emissions from possible electrical discharges
in
the atmosphere. In such a mode, it was also forseen to use
the
instrument as a riometer (Relative Ionospheric Opacity
Meter)
to measure the absorption of galactic HF emission in the
lower
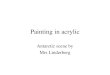
ionosphere.2) Antenna Characteristics: The radiation pattern of
the
electric antennas of TAPIR was computed by modeling it as
a coherent array of elementary dipoles excited by currents
of different magnitudes and phases, as shown schematically
in figure 1. The 34 resistors introduced in each monopoleare
located every meter [22]. The first element is directly
connected to the feeding point. The resulting
electromagnetic
field is the sum of the elementary fields generated by each
1m-segment and is expressed by formula (1). Figure 2 displays
the
calculated far-field radiation pattern of an electric antenna
laid
on pure ice at the frequency of 2MHz. As usual, the E-plane
is the vertical plane containing the antenna and the H-plane
is
the vertical plane perpendicular to the antenna, at the
center
of the antenna. The far-field radiation pattern of an
interfacial
infinitesimal dipole [1] [16] is also showed in figure 2.
EM(r,,) =
E0(r,,)
I0
35
i=1
2Ii 12
cos(k(i 12
)sin cos )
(1)
and are the spherical coordinates defined in figure 1.E0 is the
field generated by a current I0 flowing through anelementary dipole
located at the driving point or current feed
point i.e. at the center of the antenna. Its expression was
given
in [16]. Ii 12
is the current flowing in the 1 meter-segment
ni. As shown in [22], Ii 12
depends on the electromagnetic
characteristics of the soil on which the antenna is laid as
well as on the resistive profile of the dipole. Its value
for
each segment can be derived from the theoretical expression
given in [22] or computed with the numerical code.k is the
propagation vector of the waves in the medium surrounding
the
antenna i.e the interface between the air and the ice. As
shownby [38], the propagation vector of the wave at an interface
can
be approximated by:
k =k20 + k21
2
1/2=k2air + k2ice
2
1/2(2)
where k0 = kair is the wave number in the upper media andk1 =
kice in the lower one.
The computed radiation pattern differs from that of an
infinitesimal dipole mainly by being narrower in the
E-plane.
The H-plane patterns are practically identical. Both
patterns
exhibit a three-lobe structure with sharp nulls in the
E-plane.
These results are similar to those given in [3] which used
a pulse excitation and a cosine current distribution. Yet,
in
practice, these nulls may be less pronounced and the E-planebeam
approximately 70 wide. This wide radiation patternprovides a large
angular field of view for the radar which
thus illuminates reflectors or interfaces that are
significantly
away from the vertical direction. The radiated waveforms are
assumed to be identical to those received. Several examples
are given later.
III. TH E RANETA EXPERIMENT
The RANETA campaign was organized under the auspices
of the French IPEV (Institut polaire franais Paul-Emile Vic-
tor) near the cap Prudhomme station in Terre Adlie (139.9E,
-
8/6/2019 Article Antarctic Are Viewed
3/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
3
Fig. 1. Schematic view of a resistively loaded monopole along
(Ox+) used to establish the expression of the far-field radiation
pattern. Ri are the resistorslocated every meter. I(2i1)/2 are the
currents flowing in each segment of the monopole. In the symmetric
monopole oriented along (Ox
), elementarycurrents are identical but flow in the opposite
direction. The angles and are shown.
0.5 1
30
210
60
240
90270
120
300
150
330
180
0
0.5 1
30
210
60
240
90270
120
300
150
330
180
0
Elementary dipole laid on pure cold ice: |rE0|
RANETA resistively damped dipole laid on pure cold ice: |rEM
|
Fig. 2. Far field radiation patterns of an interfacial
elementary dipole and ofthe resistively loaded dipoles laid on pure
cold ice at a frequency of 2MHz.The radiation pattern of the loaded
antenna is more directionnal in the E-plane. Yet, both radiation
patterns have a maximum in the vertical directionand illuminate a
wide area of the underground.
66.68S) in January-February 2004 [10] at moderate distances
from the coast where the bedrock lies between 200 and 1200m from
the ice surface.
A. Ice and Bedrock Characteristics
The electromagnetic properties of ice as a function of tem-
perature and frequency are well documented. They have been
recently reviewed in [17]. Up to 600MHz, the
electromagneticparameters are practically independent of frequency.
Between
10C and 30C, the relative permittivity undergoesonly negligible
changes and the conductivity remains low,
between 106 and 3 105S/m. In the case of RANETAmeasurements, the
temperature between the surface and the
bedrock was estimated to be in the range from 10C to20C. Values
of the relative dielectric constant and of the
electrical conductivity in this temperature range are
typically
r 3.2 and 2 105S/m. HF waves thus experience littleattenuation
in ice and sounding depths of several kilometers are
achievable. The wavelengths corresponding to the frequencies
of operation of the radar are much greater than the average
thickness of the small scale layering (isochrone layers)
that
corresponds to the yearly accumulation of snow with typical
dimensions of a few centimeters. We neglect also potential
reflexions on internal layers due to volcanic events. Thus,
the
propagating medium can be considered as homogeneous.
The bedrock is mainly composed of gneiss with a dielectric
constant in the range 4-9 [35], probably close to 7.
Noinformation on the bedrock topography is available over the
area where the soundings have been performed. However,
according to the BEDMAP data base [24] its average elevation
lies close to the sea level and often slightly below in the
first 50km of the ice cap. The highly irregular topography ofthe
islands around Dumont dUrville and on the coast near
Cap Prudhomme station suggests that the bedrock surface is
similary irregular.
B. RANETA Observations
1) Radar soundings: During the RANETA field survey, 8soundings
of the ice sheet were performed at distances from
the coast from 5km to 45km with altitudes above the sealevel
from 285m to 1100m. The ice-bedrock interfacewas detected for all
the soundings with clear signals on both
electric and magnetic antennas. In good agreement with [24],
the ice thicknesses measured between the coast and 45kminward
are consistent with a bedrock close to the sea level.
In several occasions more than one echo was detected. A full
set of data (5 components of the electromagnetic field) was
recorded for 4 of the 8 soundings and we present in this
paper
a data processing method which allows the various echoes to
-
8/6/2019 Article Antarctic Are Viewed
4/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
4
be distinguished and to determine the orientation and
position
of the reflecting facets of the bedrock.
2) Antenna impedance measurements: The quantitative
analysis of the GPR soundings requires the knowledge of
the geoelectric characteristics (r, ) of the subsurface.
Asmentioned in the previous paragraph, the subsurface can be
considered homogeneous and thus the average geoelectric
characteristics can be taken equal to those of the shallow
subsurface. These parameters, needed to convert propagation
delays into distances, can be derived from the measurements
of the antenna impedance.
As indicated above, when an antenna is lying on the surface,
its current distribution, hence its impedance, depends on
the
electrical parameters of the ground and this coupling can
be used to retrieve the electromagnetic parameters of the
subsurface. A detailed study based on the numerical FDTD
method was recently performed by Le Gall et al. [22] for
the antennas which were used in the RANETA experiment.
They show that the impedance is controlled by the shallow
subsurface within 2m from the surface.During the RANETA field
survey, the impedance of eachdipole was measured from 400kHz to
8MHz, a range which
covers most of the frequency spectrum of the radar pulses.
Figure 3 displays the best fit between the measured and the
modeled real and imaginary parts of the antenna impedance
corresponding to r 3 and 105S/m. These valuesare in very good
agreement with published ones (see section
II-B-1). The estimated error in r is 0.25. The conductivityis
obtained with less accuracy, with an error of 3 105S/m.Its value is
larger than those given in [17]. A possible reason
stems from the fact that the shallow ice layer is warmer
than
the deeper layers and may even contain liquid water.
In the following the complex permittivity is defined by:
c = j = 0cr = 0
r j
0
, (3)
where 0 = 8.854 1012F/m, j =1 and = 2f.
IV. DATA PROCESSING
The objective of the data analysis is to sort the echoes
and compute their propagation times and directions. Prior to
resolving the range and direction of the different detected
echoes, data must be denoised and the measured magnetic
components must be corrected from a parasitic effect that
will
be described in this section.
A. Filtering and calibration
Figure 4(a) shows an example of a full set of data. We
have applied a low frequency filtering in order to suppress
the
high frequency part of the electronic and ambient noise and
a
Wiener filter allowed us to improve significantly the signal
to
noise ratio.
Comparison of the transmitted waveform at 4MHz (see
figure 4(b)) with the received signal, in particular with
the
copolar component Ex (see figure 4(a)), shows that the signaldid
not distort during propagation and reflection, r and areindependent
of frequency.
In addition, the only way to obtain true electric field
values from the output voltages at the receiver is to use a
numerical model of the antenna operation. On the contrary,
the magnetic components are directly converted into Teslas
from the calibration curves of the magnetic antenna.
B. Correction of the Measured Magnetic Field
The measured magnetic field components are the sum of (i)the
true magnetic component
Br of the reflected waves and
(ii) the magnetic fieldBA induced by the currents flowing in
the electric antennas when excited by the the electric field
of
the reflected wave. The sum of 2 induced magnetic fields
must
be removed from the measurements to get the actual vertical
magnetic component of the reflected waves (see figure 5).
With a significantly good approximation,BA can be com-
puted from the simple modelBA of a current in an infinite
electric wire given by Amperes law such that:
BA
0|I|2d
e (in Tesla) (4)This approximation was checked numerically and
is under-
stable since the magnetic antenna was located close to the
center of the dipoles and directly on the soil.
The induced magnetic fieldBA is thus in the plane normal
to the dipole so vertical at the location of the magnetic
antenna.
Therefore the measured vertical magnetic component must be
corrected. Since the magnetic antenna is very close (less than
2
meters) to the electric antenna, the measured magnetic field
of
the reflected waves has in practice no phase shift with
respect
to the electric field and thus withBr. Therefore, we used
the co-polar and cross-polar measurements from the electric
dipoles to infer the current flowing along the two antennas.
In
most soundings, the copolar signal is larger than the
crosspolarone hence the current travelling in the transmitting
electric
antenna Ico is larger than the current in the orthogonal
antennaIcross. As illustrated by figure 5, the induced vertical
magnetic
Fig. 5. Above view of the electric and magnetic antennas
configurationof operation. This figure indicates how the currents
flowing though the 2orthogonal electric dipoles induce two
parasitic components of the magneticfields: Bco and Bcross along
two opposite directions.
component can be computed from the formula:
BA 0
2
|Ico|yM
|Icross|xM
ez (in Tesla) (5)
-
8/6/2019 Article Antarctic Are Viewed
5/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
5
0 1 2 3 4 5 6
x 106
0
500
1000
1500
2000
2500
Frequency (Hz)
Re(Z
a)()
0 1 2 3 4 5 6
x 106
10000
8000
6000
4000
2000
0
Frequency (Hz)
Im(Z
a)()
Measurements on the Antarctic continent
Numerical simulation: r=3,
e=10
5S/m
Fig. 3. Real and imaginary parts of the measured and numerically
computed antenna impedance as a function of frequency on the
Antarctic ice sheet, duringthe RANETA campaign. Masurements were
made with a network analyzer HP8753C. Simulations were conducted
with a FDTD 3D code. The best fit isobtained for the following
electric characteristics: r = 3 and e = 105S/m (see [22]).
6 8 10 12 1420
0
20
Ex
Wiener filter
6 8 10 12 140.5
00.5
Ey
6 8 10 12 142
02
x 1014
Bx
6 8 10 12 141
01
x 1013
By
6 8 10 12 141
0
1x 10
13
s
Bz
6 8 10 12 1420
0
20
Ex
Raw data
6 8 10 12 140.5
00.5
Ey
6 8 10 12 142
02
x 1014
Bx
6 8 10 12 141
01
x 1013
By
6 8 10 12 141
0
1x 10
13
s
Bz
(a) February 1st , 2004 sounding, raw and Wiener filtered data.
The GPR was operating at the centralfrequency of 4MHz in a
transformer matching mode. The x-axis is the delay time in s, and
the unitof the y-axis is mV at the output of the electric receivers
and in Teslas for the magnetic channels.
1 0 11
0
1
2MHz 500s
1 0 1
0.5
0
0.5
3MHz 500s
1 0 11
0
1
4MHz 500s
s
(b) Waveforms of the antennainput potential at the
centralfrequencies of operation 2, 3,4MHz in mV. The length of
eachpulse is about 500ns.
Fig. 4. Full set of data and transmitted waveforms.
where xM and yM are the horizontal coordinates of thelocation of
the magnetic antenna in the (Oxyz) frame of
reference defined by the electric dipoles. The currents Ico
andIcross are deduced from the measured voltages of the outputof
the electric antennas divided by the antenna impedance Za.
The ratio between the vertical magnetic field of reflected
waves and the induced magnetic fieldBA depends on the
inclination of the propagation vector of the reflected waves.
If
the reflecting interface is nearly horizontal, the magnetic
field
of reflected waves is also nearly horizontal and its
vertical
component is very weak compared to the induced magnetic
fieldBA. If reflection occurs from a strongly inclined facet
of the bedrock, the reflected waves have a propagation
vector
which is also strongly inclined with respect to the
horizontal
plane and their vertical magnetic component may be of the
same order of magnitude as BA.
V. DATA INTERPRETATION : IMAGING OF THE SUBSURFACE
A. Time of Arrival of the Echos versus Elevation above the
Bedrock
The times of arrival of the detected echos were determined
by cross-correlating the received signals with the derivative
of
the transmitted waveform. For each sounding, we computed
the average value of the delays obtained independently for
dif-
ferent frequencies of operation and transmission
polarisations.
The standard deviation provides an estimate of the irregular
-
8/6/2019 Article Antarctic Are Viewed
6/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
6
topography of the subsurface. These delays can be converted
into distance according to the relation:
d =ctd
2
r1(6)
where r1 is the relative permittivity of the ice.Figure 6
displays the distances of the first (and usually)
main reflector from the radar along the RANETA soundings
track. These distances may differ from the actual depths of
the
reflecting facets since some of them may be out-of-plane.
The
altitude of each sounding site is also indicated.
0 5 10 15 20 25 30 35 40 45200
300
400
500
600
700
800
900
1000
1100
1200
Distance from Cap Prudhomme station along the track (km)
meters
01/31
02/0502/04
01/2901/22
01/3002/01
01/23
01/24
02/26
Altitude above the sea level
Distance of the main subsurface reflector from the radar
Fig. 6. Measured distances between the bedrock and the source at
each sitealong the RANETA survey track. 8 soundings where performed
during 10days. Altitudes above the sea level of each site are also
indicated.
In good agreement with [24], the bedrock appears to belocated
close to or a few tens of meters under the sea level.
The large standard deviation recorded on the 30th of
Januarysuggests a very irregular hilly topography of the
bedrock.
B. Determination of the Direction of the Propagation Vector
The method to retrieve the direction of propagation of
the reflected waves is based on a comparison between the
measured components Ex, Ey , Bx, By and Bz and a theo-retical
expression of the electromagnetic field obtained for the
reflection from an inclined facet.
1) Theoretical modeling: As shown in [11], the far-field
limit is < 100m in the ice at 2MHz. Thus, for all the
sound-ings discussed in this paper, the reflection of the
transmitted
waves occurs in the far-field region. In these conditions we
consider the reflections to be locally plane waves with the
incident electric and magnetic fieldsEi and
Bi perpendicular
to each other and to the propagation vectorki . The large
wavelengths of operation of the radar allow to consider that
the bedrock surface roughness has no effect. Moreover, we
assume that the waves reflect on a plane surface with large
enough dimensions so that diffraction at the edges can be
neglected. This hypothesis was prompted by the result of a
stringent computation of the budget power: it shows that the
predicted and measured electromagnetic field (corresponding
to the bedrock reflections) agree quite well which indicates
that the size of the reflecting facets must be close to the
size
of the Fresnel zone and that the propagation medium can be
considered homogeneous; the Kirchhoff approximation is thus
valid. Nevertheless, some of the observed weaker echos might
be due to diffraction processes on the wedges of the bedrock
large scale topography. In such case, we should be able to
determine the direction of arrival of these diffracted waves
too [13] and to take the diffracting structures into account
in
imaging the subsurface.
With a mono-static radar, the detected reflected waves arise
mainly from normal (specular) reflections on one or several
facets (in case of multiple echoes). To compute the
returning
wave vector kr one possible solution could be to derive
themissing vertical electrical component from:
Erz = BrxErx + BryEryBrz
(7)
and to use the relation: kr =cn1
Er Br. Er and Br are the
returning electric and magnetic fields. However, this simple
method is precluded in most cases since the reflecting
facets
are often weakly inclined and, as a consequence, the
reflected
waves propagate close to the ascending vertical. The
received
vertical magnetic component Brz is thus small which canentail
large errors in the computed value Erz .
Using equation (1) which provides a theoretical analytical
expression of the far-field is also impractical due to the
presence of deep minima between the main lobe and the
secondary ones, which may yield computational issues for
some configurations. Also, the true radiation pattern minima
between the primary lobe and the sidelobes may be less
pronounced than the theoretical one making the expression
(1) inaccurate. We have thus developed a different methodusing a
more general expression of the electromagnetic field.
Its principle can be described as follows.
We let (ex, ey , ez ) be the reference frame and and , theangles
defining the direction of arrival of the reflected waveskr (see
figure 7(a)) are = (
z , kr) and = (x , krh) wherekrh is the horizontal component of
the reflected wave vectorkr:
kr =
sin cos sin sin
cos
. (8)
As depicted in figure 7(b), we define a new frame of
reference (OXY Z) where Z is alongkr , X is obtained by
a rotation of x around Z (hence x1) followed by a rotation
around y1 and Y is in the horizontal plane perpendicular
to (OXZ). In the (OXY) plane,E makes an angle with
(OX).The reflected fields are then given in (Oxyz) by:
Er(r, t) = E0f(...)
cos cos cos sin sin cos cos sin + sin cos
cos sin
(9)
and
f(...) = f(t,d,1, 2, ) =
2de
2d g( krr (t )), (10)
-
8/6/2019 Article Antarctic Are Viewed
7/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
7
(a) Schematic view of the GPR in Terre Adlie and of the
referenceframe. The electrical dipoles are lying on the ice and
define the x andy-axis.
(b) Frames and angles of reference.
Fig. 7. Notations and frames of reference.
where E0 is the amplitude of the transmitted signal, d is
thedistance between the radar and the reflecting facet, g is
thewaveform of the transmitted signal, is the coefficient
ofreflection on the ice-bedrock interface, = 2d
r1/c is the
propagation time of the wave, is the coefficient of
attenuationdefined by:
=1
21
0
0r1(11)
and
Br =n1c kr Er. (12)
r1, 1 and 0 are the electric relative permittivity,
electricconductivity and magnetic permeability of ice, 2 is the
di-electric constant of the bedrock.
Hence,
Br(r, t) =
E0Z1
h(...)
sin cos cos cos sin sin cos sin + cos cos
sin sin
(13)
where
h(...) = h(t,d,1, 2, ) =
2de
2d w( krr (t )) (14)
and Z1 =
1
= cn1 is the impedance of the ice. The quantity
w is the waveform of the magnetic signal.2) Implementation of
the method: The unknown attenuation
factor can be eliminated by using values of the electric and
magnetic components that are normalized with respect to a
reference waveform. The reference waveform is extracted from
the signal and takes into account the distortions induced by
the amplifier, the coupling between its output and the
antenna
as well as those in the reception channel. As mentioned in
section III-C-1, the propagation time , hence the distanced, can
be derived from the cross-correlation of the received
electric signal with the reference waveform at the
transmitted
frequency. However, since we used simultaneously the
electric
and magnetic channels with different delays in the
electronics,
we did not use this method but kept the distance to be
determined together with the other parameters.
We are thus left with 4 unknowns: d, , and , and 5non linear
equations from equations (9) (without the analytical
expression of Erz) and (13). An iterative procedure based onthe
minimization of the least square error between theoretical
and observed electromagnetic field components was used toinfer
the desired parameters.
Lastly we accounted for the refraction of the wave at the
exit from the ice. Vertical and horizontal angles, and ,
ofinclination of the detected subsurface facet were derived
from
the computed values of and from:
= arcsin
sin
r1
and = (15)
The refraction prevented us from determining the actual
value of vertical inclinations that exceed the critical anglec =
sin
1(1/
r1). Beyond this value, waves exit from theice with a direction
parallel to the interface as anticipated
by Goos and Hnchen [18] (the Goos-Hnchen effect is
alsoresponsible for the existence of sidelobes in the radiation
pattern of a dipole in the vinicity of an interface). At the
interface air/ice, c is equal to 34.
C. Validation of the Method on Simulated Data
XLIM1 has developed a 3D FDTD (Finite Difference Time
Domain) code called TEMSI-FD for a wide domain of appli-
cations. A detailed description of this TEMSI-FD can be
found
1Formely the IRCOM, Institut de Recherche en Communications
Optiqueet Micro-ondes (Limoges)
-
8/6/2019 Article Antarctic Are Viewed
8/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
8
in [25], [11] and [5]. We have used it to perform numerical
simulations of the operation of the radar in simplified or
realistic environments.
The simulations used two different configurations of the
bedrock interface, one located at a depth of 400m and thesecond
one at 700m. They are shown in figures 8(a) and9(a) where the
directions of the expected specular reflections
are indicated. The dimensions of the computational box in
the
three orthogonal directions (Ox), (Oy), (Oz) are
respectively(300m, 300m, 400m) and (500, 500, 700m). The mesh
sizeis 1 meter in all directions which is small enough to
preventnumerical dispersion. In modeling the ice we have neglected
its
conductivity and set its permittivity equal to 3.2. The
bedrockis substituted by a perfectly reflecting metal. This does
not
modify the relative magnitudes of the components of the EM
field of the reflected waves; hence does not introduce any
error
in the retrieval of their direction of arrival.1) Simulation 1:
single reflector case: The bedrock is
modeled as a single inclined facet with a normal defined by
= 60 and = 10. Figure 8(b) compares the TEMSI-FD simulated data
at
4MHz and the electromagnetic field
components derived from the analysis described in section V-
B.1. There is obviously a very good agreement between these
two sets of curves. The adjusted parameters inferred from
the
optimal fit are: td = 4.325s hence d 363m, = 61, = 9.9475. They
are consistent with the actual parametersof the facet. It must be
noted that these fits were obtained by
minimizing the least square errors between the 5 simulated
and
theoretical components of the electromagnetic field: Ex, Ey ,Bx,
By and Bz. Nevertheless, it gives a good result for thevertical
electric component Ez which adds to the validation ofthe method.
Tests were conducted by introducing conductive
losses ( = 105S/m instead of0S/m) and have shown that the
derived geometric parameters,
,
and d, remain unchanged.The error on the estimation of and can
stem from twosources:
the finite steps on , and used to minimize the rmsdeviation
the inaccuracy of the measurements due to ambient
noises, couplings, waves superpositions...
As far as simulations are concerned, data can be regarded
as unimpaired by any noise. As aforementioned, the error
function D(, ) illustrated by figure 8(c) exhibits a
globalminimum ( = 10 and = 61). The rms deviation isclearly less
sensitive to than to thus the uncertainity onthe estimated value of
is larger.
2) Simulation 2: multiple reflectors case: In the
secondconfiguration, the bedrock interface consists of 2 facets
with
their normals inclined at 26 and 17 with respect to thevertical
axe and rotated at 45 from (Ox). A third horizontalfacet is located
between these two as illustrated in figure 9(a).
In order to increase the time difference between the 3
echoes,
the propagation velocity was decreased by taking a relative
permittivity of9 in place of3.2. Three waves can then be
easilydiscriminated: (i) wave 1 arises from the facet inclined at
26,(ii) wave 2 corresponds to a reflection on the facet inclined
at
17, (iii) wave 3 originates from the reflection on the
plateaubetween the two inclined facets. Wave 1 is expected to
exit
from the subsurface with an inclination of 90 with respect tothe
vertical since 26 > |c| 19.5 where c is the criticalangle of
refraction. Indeed, according to the Snell-Descartes
laws, the energy must be totally reflected downward at the
interface between ice and air. Yet, Goos and Hnchen had
demonstrated that a wave can exit from a more refringent
medium (ice) to a less refringent one (air) when the
critical
angle is exceeded [18] [32] [31]. Such a wave, sometimes
existing as a lateral wave, is evanescent i.e. confined to
the
interface between the two media. It travels along the
surface
before diving again into the more refringent area.
The derived geometric parameters are indicated in the fig-
ures 9(b), 9(c) and 9(d) where we have shown the mean square
deviation for each echo. , and d are quite close to theexpected
values. The errors made on the amplitudes of the
various components (arising mainly from the fact that the 3
echos are not well separated) and the sensitivity of D(, )to the
horizontal angle account for the error on the estimate of
. The error on remains small. Supplementary simulationshave
shown that the uncertainties on the estimate of the angular
parameters
and
increase as the reflecting buried facetbecomes more
horizontal.
This example features three interesting events that are ex-
pected in actual soundings:
1) a reflection arising from an interface with an inclina-
tion larger than c: as anticipated by Goos and Hnchen[18], the
wave at the exit from the ice is grazing and the
actual inclination of the facet will stay unknown. Onewill only
be able to conclude that: c or c. Yet, the horizontal inclination
can be determinedwith a good accuracy.
2) a wave reaching the surface with a quasi-normal
incidence: this occurs when the radar is located just
above a horizontal reflector. is no longer defined andthe poor
sensitivity of the mean square error D on
leads to errors up to a few degrees on its estimated value.
3) a wave propagating along a direction between 0
and c: in this case, both and can be determined
with reasonable accuracy. The accuracy on will bealways better
than the accuracy on .
D. Application to RANETA Data
1) Single reflector case: On the 1st of February, a singleecho
was clearly detected on both electric and magnetic
components. Table I provides the derived characteristics of
the returning wave (time delay and direction of arrival).
Thepropagation distance d can be determined from the time
delaythrough relation (6). Taking into account the vertical angle
,the retrieved depth is h = d cos 700m which comparesreasonably
well with the altitude of the radar above the sea
level (641m). The derived angles for the 3 different
centraloperating frequencies are in good agreement with each
another.
It must be noted that the values of are consistent with thefact
that the highest signals were observed on the monopoles
oriented parallel to (Ox) and (Oy+) which implies that:90 <
< 180. The vertical inclination is quite high, 24. As indicated
in section III-A, it is likely that the
-
8/6/2019 Article Antarctic Are Viewed
9/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
9
(a) FDTD simulation 1: the GPR is laid on the surface. In
thesubsurface, a facet showing the following inclinations: = 60
and = 10 is capped by 400m of non lossy ice (r = 3.2)
3 3.5 4 4.5 5 5.5 6 6.5 7
x 106
10.5
00.5
Ex
3 3.5 4 4.5 5 5.5 6 6.5 7
x 106
0.05
0
0.05
Ey
3 3.5 4 4.5 5 5.5 6 6.5 7
x 106
0.2
0
0.2
Ez
3 3.5 4 4.5 5 5.5 6 6.5 7
x 106
0.02
0
0.02
Bx
3 3.5 4 4.5 5 5.5 6 6.5 7
x 106
10.5
00.5
By
3 3.5 4 4.5 5 5.5 6 6.5 7
x 106
0.5
0
0.5
s
Bz
Numerical Simulation: *: 60,
*: 10
Fitting theoritical Model: td: 4.325s,
*: 61,
*: 9.9475
(b) The electric and magnetic components of the reflected wave
asa function of time are shown as full gray lines. Using the
theoreticalexpressions (9) and (13), the best fit (minimizing the
least square errorbetween the simulated data and the theoretical
model) is obtained forthe following input parameters: td =
4.325s,
= 61, =9.9475 (dotted black lines)
(c) Standard deviation between simulations and the-ory as a
function of and . It is normalized byits minimum.
Fig. 8. Validation of the method developed to image the
subsurface on FDTD simulated data corresponding to a single buried
inclined facet.
bedrock topography is highly irregular and may well account
for this value.
Figure 10(a) compares between the measured components
of the EM field for different central frequencies with the
signals computed using the derived parameters. The
goodconsistency between these curves is very clear. Fits are
also
good for the component Ez , the vertical electric field
obtainedusing formula (7). An appropriate median filter was applied
to
avoid numerical aberrance. The worst fitted component, Ey,
islogically the weakest one.
The mean square deviation between the theoretical model
and the data is computed at each frequency as a function of
and . Figure 10(b) corresponds to a central frequency of4MHz. It
clearly exhibits a global minimum. In the analysisof actual
sounding data, the main source of error lies in
the determination of the induced vertical component of the
TABLE I
CHARACTERISTICS OF THE ECHO MEASURED ON THE 1st OF FEBRUARY
2004 DEDUCED FROM THE PROPOSED METHOD OF IDENTIFICATION AT
THREE DIFFERENT CENTRAL FREQUENCIES OF OPERATION 2, 3, 4MHZ.
f td d h
4MHz 9.34s 783m 717m 109 23.7
3MHz 9.24s 775m 698m 105 25.7
2MHz 9.015s 756m 701m 105 25.3
magnetic field. Figure 11(a) shows the resulting errors on
the
estimated angular parameters, and , as a function of theerror on
the corrected component Bz . In may be seen thateven in the case of
a very poor accuracy on the amplitude
of Bz , uncertainities on and remain reasonably low, in
particular for the second one.
-
8/6/2019 Article Antarctic Are Viewed
10/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
10
(a) FDTD simulation 2: the GPR is laid on the surface. Beneath
700m of a dielectric material(r = 9), in the = 45-plane, the
subsurface exibits 3 facets. Their vertical inclinations arethe
followings: 1 = 26
, 2 = 17 and 3 = 0
.
(b) Standard deviation used to identify the first echonormalized
by its minimum. The derived parameterscorrespond to the minimum of
the error: = cand = 46. The input parameters in the FDTDcode are: 1
= 26
> c and = 45.
(c) Standard deviation used to identify the secondecho
normalized by its minimum. The derived pa-rameters correspond to
the minimum of the error: = 16.691 and = 50. The input parametersin
the FDTD code are: 2 = 17
and = 45.
(d) Standard deviation used to identify the thirdecho normalized
by its minimum. The vertical anglecorresponding to the minimum of
the error is =3.65. The input vertical angle in the FDTD codeis: 3
= 0
. is not defined.
Fig. 9. Validation of the method developed to image the
subsurface on FDTD simulated data showing 3 echoes.
2) Multiple reflectors case: In a number of soundings,
multiple echoes were detected. In particular, on the 4th
ofFebruary, at least 3 echoes can be discriminated. Two of
these
are less intense at central frequencies of 2 and 3MHz. Thiscan
be explained by an improvement in the quality of the
measurements when the frequency, hence the number of half-
cycles of the transmitted signal, increases. For this reason,
we
focused as in figure 4(a) our analysis on data measured at
the central frequency of 4MHz. Table II displays the results
derived from the analysis of each echo. The elevation above
the sea level of the radar was 373m.When waves have close time
of arrival, their amplitudes
can be slightly enhanced or reduced (due to interference).
Figure 11(b) displays the standard deviations on and
as a function of the error on the amplitude of each componentfor
the cases presented in this paper. Standard deviations with
respect to the actual input values of and increase linearlywith
this error. The method of analysis showed here thus yields
better results when the multiple echoes are separated enough
in time.
V I . CONCLUSION AND DISCUSSION
This paper intended to present a method allowing to identify
the location and inclination of the reflecting structures of
the subsurface detected by a HF ground penetrating radar
operating with stationary antennas. The methodology was
-
8/6/2019 Article Antarctic Are Viewed
11/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
11
9 10 112
0
2
Ex
4MHz td:9.34 s *:109 *:23.7
9 10 11
0.020
0.02
Ey
9 10 111
0
1
Ez
9 10 110.5
0
0.5
Bx
9 10 111
0
1
By
9 10 111
0
1
s
Bz
9 10 112
0
2
3MHz td:9.24 s *:105 *:25.7
9 10 11
0.020
0.02
9 10 110.5
0
0.5
9 10 110.5
0
0.5
9 10 111
0
1
9 10 111
0
1
s
9 10 112
0
2
2MHz td:9.015 s *:105 *:25.3
9 10 11
0.020
0.02
9 10 110.5
0
0.5
9 10 110.5
0
0.5
9 10 111
0
1
9 10 111
0
1
sMeasured signal Envelop Fitting signal
(a) Comparison of the data collected on the 1st of February 2004
in Terre Adlie at the three operating frequencies 2, 3 and 4MHz
with the bestfits derived from the proposed method. The vertical
electric component Ez was reconstructed with the five other
components of the electromagneticfield using the formula (7). The
values of the angles providing the best fits at different
frequencies are consistent with one another.
(b) Mean square error on the identification of theecho detected
on February, 1, 2004. The derivedparameter correspond to the
minimum of the error: = 23.711 and = 109.
Fig. 10. Application of the method to data collected on the 1st
of February 2004
TABLE II
CHARACTERISTICS OF THE 3 ECHOS MEASURED ON THE 4th OF FEBRUARY
2004 DEDUCED FROM THE PROPOSED METHOD OF IDENTIFICATION AT THE
CENTRAL FREQUENCY OF OPERATION 4M HZ.
Echo 1 Echo 2 Echo 3
d1
1
1 d2
2
2 d3
3
3
410m 140 -15.215 559m 91 -31.9 624m 90 3 < c = 34
successfully validated on simulated data for this purpose.
Numerical simulations were conducted using a FDTD code
able to model complex propagating media. The method was
then applied to real data collected in the framework of the
RANETA campaign during which a series of soundings were
performed over the Antarctic ice sheet in Terre Adlie. In
several occasions more than one echo has been detected and
the developed data processing proved its ability to
disentangle
the origin of the various echos and to retrieve the vertical
and
horizontal inclinations of the reflecting facets of the
ice-bed
rock. The derived results show good consistency.
A stringent investigation on the error in our estimates of
the angular parameters was conducted. It appeared that main
uncertainties stem from the range resolution of the
instrument
since the developed method requires separated echos. A
signal
processing technique allowing to improve data resolution is
currently investigated. Only applied to atmospheric radars
until
now, the frequency domain interferometry [29] [23] [36] is a
method inspired by the spatial domain interferometry that is
likely to bring strong improvements in the processing.
-
8/6/2019 Article Antarctic Are Viewed
12/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
12
50 40 30 20 10 0 10 20 30 40 5050
20
0
20
*
*=25.3 *=105
*=15.215 *=140
*=31.9 *=91
50 40 30 20 10 0 10 20 30 40 505010
5
0
5
10
*()
Error on Hz (%)
(a) Uncertainties on and as a function of the error (in %) on
thecorrected component Hz .
0 2 4 6 8 10 12 140
2
4
6
std(*)()
0 2 4 6 8 10 12 140
1
2
3
Error on each component(%)
std(*)()
*=15.215 *=140
*=31.9 *=91
*=25.3 *=105
(b) Standard deviation on and as a function of the error on the
amplitudeof each component (in %).
Fig. 11. Uncertainties on the estimation of and for 2 sources of
error.
In order to retrieve the direction of arrival of the
backscat-tered waves, we assumed that the measured echos arose
from
reflections on large facets (with scale comparable to the
Fresnel
zone) of the subsurface. The overall power budget showed
that this simple assumption was acceptable. Yet, it may
entail
errors in the reconstruction of the bedrock. To correctly
image
the conical volume beneath the stationary antennas of TAPIR,
pulse returns have to be resolved not only in range and
direction but also in amplitude to take into account the
small
reflecting structures. For this purpose, future
investigations
may rely on the work of Beckmann and Spezzichino [6] that
assumes that facet reflections strength is governed by both
the
local Fresnel reflection coefficient and the size of the
facet.
We have also discarded the idea that waves could be due
to diffraction on the edges of the bedrock. However,
Ciarletti
et al. [13] demonstated that, if so, the method still allows
to determine their direction of propagation. We chose not to
consider these waves because their amplitudes are 10 timeslower
that the amplitudes of the specular reflections.
Besides, we hypothesized that the ice sheet lying over the
bedrock was homogeneous. However, several authors men-
tioned the presence of bright internal layers in the
Antarctic
ice sheet that can be a significant source of interference
in
the frequency range of TAPIR [40] [21]. Acting as
isochrones,
these layers can be due to past atmospheric changes or
volcanic
eruptions and their brightness can locally rival bed
echoamplitudes. Yet, internal layers are intermittent. In
particular,
they are often absent within ice streams. We ignore whether
or not such bright layers exist along the sounding track of
the RANETA survey but, once again, our work focused on the
interaction with the bedrock and the power budget showed
that
if they do, their impact on the measured waves is weak.
Future
investigations will be dedicated to the study of the waves
recorded before the bedrock response in order to determine
their origine.
Work is in progress to extend the reported studies to more
realistic and detailed descriptions of the actual 3-D geometry
of
the Antarctic bedrock structure. More refined processing willbe
developed but the preliminary results obtained with simple
assumptions are quite promising. They exhibit the key role
that
ground penetrating radars can play in the effort of
investigation
of the Antarctic continent. They can provide information of
prime interest to understand the processes involved in the
dynamics and long-term evolution of the Antarctic polar cap
and glaciers. In particular, ground penetrating radar
soundings
are among the most useful instruments to measure the ice
thickness and reveal the Antarctic ice-bed rock topography.
Such information is required to properly model the dynamical
behaviour of the ice sheet and help predicting its future.
The updated version of the NetLander GPR, TAPIR, hasbeen
proposed to fly on board of the ESA ExoMars spacecraft
(experiment EISS in the GEophysical Package of ExoMars).
The subsurface exploration of Mars still arouses a great
interest. This interest has been recently enhanced by the
unprecedented observations of the Mars Advanced Radar for
Subsurface and Ionospheric Sounding (MARSIS) instrument,
onboard the European Space Agencys Mars Express orbiter
[30] [34] [20]. MARSIS has demonstrated its capability to
detect structures and layers beneath the Martian surface. In
particular, it provided a low-resolution map of the base of
the
Polar Layered Deposits, penetrating up to 3.7km the ice-rich
upper layer of Martian South cap. Ground penetrating
radar appears as a unique tool in planetary research to
exploredeep surbsurface. Other methods of investigation such as
active
seismic measurements, in spite of their extremely high
interest,
require large resources and a heavy operational logistics.
MARSIS results allow to predict that TAPIR which operates in
the same frequency range but from the surface and can
perform
a larger number of coherent additions will be able to reach
deeper burried Martian structures. RANETA results also promp
our expectations of the usefulness of such an instrument on
board of a future mission to Europa. This Jovian satellite
might
hide a water ocean under an icy crust and ground penetrating
radar soundings would be of very high interest.
-
8/6/2019 Article Antarctic Are Viewed
13/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
13
ACKNOWLEDGMENT
The authors would like to thank IPEV (Institut Paul-Emile
Victor) who was in charge of the organization of the RANETA
campaign and CNES for funding the development of the radar
under grants 793/CNES/99/7947 and 737/CNES/00/826. We
are very grateful to S.A. Arcone for his constructive
review.
REFERENCES
[1] R.D. Annan, W.M. Waller, D.W. Strangway, J.R. Rossiter, J.D.
Redman,and R.D. Watts, The electromagnetic response of a low-loss,
2-layerdielectric earth for horizontal electric dipole excitation,
Geophysics, vol.40(2), pp. 285-298, 1975
[2] S.A Arcone, Distortion of model subsurface radar pulses in
complexdielectrics, Radio Science, vol. 16(5), pp. 855-864,
1981
[3] S.A Arcone, Numerical studies of the radiation patterns of
resistivelyloaded dipoles, Journal of Applied Geophysics, vol. 33,
pp. 39-52, 1995
[4] S.A Arcone, High resolution of glacial ice stratigraphy : A
ground-penetrating radar study of Pegasus Runway, McMurdo Station,
Antarc-tica, Geophysics, vol. 61(6), pp. 1653-1663, 1996
[5] G. Bauchet, Etude thorique et validation exprimentale de
lanalyselectromagntique dun radar destin au sondage du sous-sol
Martien,Ph.D. dissertation, Univ. de Limoges, Limoges, France,
2004
[6] P. Beckmann and A. Spizzichino, The scattering of
electromagnetic
waves from rough surfaces, T. Artech House, N.Y., 1963[7] J.P.
Berenger, A perfectly matched layer for the absorption of
electromag-
netic waves, J. Comput. Phys., vol. 114, pp. 185-200, 1994[8]
J.J. Berthelier, R. Ney, F. Costard, A. Meyer, B. Martinat, A.
Reineix,
T. Hansen, M. Bano, W. Kofman, F. Lefeuvre and P. Paillou, The
GPRexperiment on NetLander, Planet. Space Sci., vol. 48, pp.
1161-1180,2000
[9] J.J. Berthelier, R. Ney, V. Ciarletti, B. Martinat, M.
Hamelin, F. Costard,P. Paillou, C. Duvanaud, C. Nevejans, w.
Kofman, J.G. Trotignon, G.Grandjean, M. Zamora and A. Nagy, GPR, a
ground-penetrating radarfor the NETLANDER mission, J. Geophys.
Res., vol. 108(E4), 8027,doi:10.1029/2002JE001866, 2003
[10] J.J. Berthelier, S. Bonaim, V. Ciarletti, R. Clairquin, F.
Dolon, A. LeGall, D. Nevejans, R. Ney and A. Reineix, Initial
results of the Netlanderimaging ground penetrating radar operated
on the Antarctic ice shelf, J.Geophys. Let., 2005
[11] S. Besse, Etude thorique de radars gologiques: Analyses de
sols,
dantennes et interprtation des signaux, Ph.D. dissertation,
Univ. deLimoges, Limoges, France, 2004
[12] G. Catania, H. Conway, A. Gades, C. Raymond, and H.
Engelhardt, Bedreflectivity beneath inactive ice streams in West
Antarctica, Annales ofGlaciology, vol. 36, pp. 287-291, 2003
[13] V. Ciarletti, A. Reineix, B. Martinat, J.J. Berthelier and
R. Ney, Numeri-cal simulation of the GPR operation of the GPR radar
on NETLANDER,
J. Geophys. Res., 108 (E4), 8028, doi: 10.1029/2002JE0011866,
2003[14] S.M. Clifford, A model for hydrologic and climatic
behaviour of water
on Mars, J. Geophys. Res., vol. 98(E6), pp. 10973-11016 1993[15]
P.R. Christensen, Formation of recent martian gullies through
melting
of extensive water-rich snow deposits, Nature, vol. 422, pp.
45-48, 2003[16] N. Engheta, C.H. Pappas and C. Elachi, Radiation
patterns of interfacial
dipole antennas, Radio Sci., vol. 17, pp. 1557-1566, 1982[17] S.
Fujita, T. Matsuoka, T. Ishida, K. Matsuoka, and S. Mae, A
summary
of the complex dielectric permittivity of ice in the megahertz
range andits applications for radar sounding of polar ice sheets,
in The Physics of
Ice Core Record, T. Hondoh ed., Hokkaido, University Press,
Sapporo,2000
[18] F. Goos and Hnchen M., Ann. Phys., vol. 1, pp. 333-346,
1947[19] R. Holland and L. Simpson, Finite-difference analysis EMP
coupling
to thin strut and wires, IEEE Tans. Electromagn. Compact., vol.
23(2),pp. 88-97, 1981
[20] A. Ivanov, A. Safaeinili, J. Plaut, S. Milkovich and G.
Picardi, Obser-vations of the layering structure in the Martian
Polar Layered Depositswith the MARSIS instrument, 2006 AGU Fall
meeting, San Fransisco,CA, USA, 2006
[21] R.W. Jacobel and B.C. Welch, time marker at 17.5kyr BP
detectedthroughout West Antarctica, Annals of geology, vol. 41, pp.
47-51, 2005
[22] A. Le Gall, A. Reineix, V. Ciarletti, J. J Berthelier, R.
Ney, F. Dolon,and C. Corbel, An estimation of the electrical
characteristics of plane-tary shallow subsurfaces with TAPIR
antennas, J. Geophys. Res., vol.111(E06S06),
doi:10.1029/2005JE002595, 2006
[23] H. Luce, M. Yamamoto, S. Fukao, D. Helal and M. Crochet,
Afrequency domain radar interferometric imaging (FII) technique
based onhigh-resolution methods, Journal of Atmospheric and
Solar-TerrestrialPhysics, vol. 63, p. 221-234, 2001
[24] M.L. Lythe, D.G. Vaughan and the BEDMAP Consortium,
BEDMAP:a new ice thickness and subglacial topographic model of
Antarctica, J.Geophys. Res., Vol.106(B6), pp.11,335-11,351,
2001
[25] B. Martinat, Etude lectromagntique du GPR de
NETLANDERdestin au sondage du sous-sol Martien, Ph.D. dissertation,
Univ. deLimoges, Limoges, France, 2001
[26] M.T. Mellon and B.M. Jakosky, The distribution and behavior
of Mar-tian ground ice during past and present epochs, Journal of
Geophysical
Research, vol. 100(E6), p. 11,781-11,79911, 1995[27] M.T. Mellon
and R. J. Phillips, Recent gullies on Mars and the source
of liquid water, Journal of Geophysical Research, vol. 106, pp.
1-15.,2001
[28] M.L. Moran, S.A. Arcone and R.J. Greenfield GPR radiation
patterneffects on 3-D Kirchhoff array imaging, Proc. SPIE: Eigth
InternationalConference on Ground Penetrating Radar, Vol. 4084, pp.
208-212, 2000
[29] R.D. Palmer, T.Y. Yu, Range imaging using frequency
diversity, RadioScience, vol. 34(6), pp. 1485-1496, 1999
[30] G. Picardi and the MARSIS team, Radar Soundings of the
Subsurfaceof Mars, Science, vol. 310, pp. 1925 - 1928, 2005
[31] S.J. Radzevicius, J.J. Daniels and C.C. Chen, GPR H-plane
patterns fora horizontal dipole on a half-space interface, GPR 2000
Conference,Brisbane, Australia, 2000
[32] R.K. Renard R.K., Total reflection : a new evaluation of
the Goos-
Hnchen shift, Journal of Optical Society of America, vol.
54(10), pp.459-512, 1964
[33] J.A. Roden and S. Gedney, Efficient implementation of
uni-axial basedPML media in three-dimensional non-orthogonal
coordinates using FDTDtechnique, Microwave Opt. Technol. Lett.,
vol. 14(2), pp. 71-75, 1997
[34] J.J. Plaut and the MARSIS team, MARSIS Subsurface
SoundingObservations of the Polar Deposits of Mars, 2006 AGU Fall
meeting,San Fransisco, CA, USA, 2006
[35] M.J. Siegert, Lakes beneath the ice sheet: The occurrence,
analysis andfuture exploration of Lake Vostok and other Antarctic
subglacial lakes,
Annual Reviews of Earth and Planetary Sciences, vol. 33, pp.
215-245,2005
[36] L. Smani, H. Luce, M. Crochet and S. Fukao, An improved
high-resolution processing method for a frequency domain
interferometricimaging (FII) technique, Journal of Atmospheric and
Oceanic Technol-ogy, vol. 19, pp. 954-966, 2002
[37] S.W. Squyres, S.M. Clifford, R.O. Kuzmin, J.R. Zimbelman
and F.M.
Costard, Ice in the Martian regolith, in Mars, Kieffer, H. H.,
Jakosky,B. M., Snyder, C. W., and Matthews, M. S. (eds), University
of ArizonaPress, Tucson, AZ, United States, pp. 523-554, 1992
[38] J.R. Wait, Theory of wave propagation along a thin wire
parallel to aninterface, Radio Sc, vol.7(6), pp. 675-679, 1972
[39] T.T. Wu and R. W. P. King, Cylindrical antenna with
nonreflectingresistive loading, IEEE Trans. Ant. Prop., 1965
[40] B.C. Welch and R. Jacobel, Analysis of deep-penetrating
radar surveysof West Antarctica US-ITASE 2001, Geophysical Research
Letters, Vol.30(8), doi:10.1029/2003GL017210, 2003
[41] K.S. Yee, Numerical solution of initial boundary value
problems involv-ing Maxwells equations in isotropic media, IEEE
Trans. Electromagn.Compat., vol. 14(4), pp. 302-307, 1996
Alice Le Gall graduated in radio-communicationand electronic
engineering from the Ecole SuprieuredElectricit (SUPELEC). She
received in 2004 the"Astrophysics and Astronomy" DEA degree from
theUniversity Paris Diderot (Paris 7), France. She iscurrently
pursuing a Ph.D. degree in planetary sub-surface exploration by
ground penetrating radar fromthe Centre dEtude des Environnements
Terrestre etPlantaires (CETP-IPSL).
-
8/6/2019 Article Antarctic Are Viewed
14/14
SUBMISSION TO IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING
14
Valrie Ciarletti graduated in engineering degreefrom the Ecole
Centrale de Paris in 1984 and re-ceived, in 1989, a Ph.D. degree
from the UniversityParis 6, France. Since 1990, she has been an
asso-ciate professor at Paris 13 university in the field
oftelecommunication engineering. In 1993, her field ofinterest
turned to microwave remote sensing (GroundPenetrating Radars and
Radars devoted to surfaceremote sensing) She was involved as the
deputyPI in the NetLander GPR project and is PI of the
WISDOM and EISS experiments proposed on theExoMars mission.
Jean-Jacques Berthelier graduated from Ecole
Polytechnique in 1961. He has been active in spacephysics since
1965 starting with studies of the polarionosphere with rocket
experiments. He was involvedas a PI or CoPI in several space
projects to measurethe dynamics of the terrestrial, cometary or
plane-tary plasmas and plasma waves. He has also beenactive in the
field of atmospheric electricity bothon Earth and on future
planetary missions. Fromhis own experience in works measurements in
spacehe became interested by ground penetrating radar
and subsurface propagation being the PI of the ill-fated
NetLander mission.He is presently CoPI of the WISDOM, EISS GPR
experiments and ARESexperiment on ExoMars.
Alain Reineix graduated from the University ofLimoges (France).
In 1986, he received a PhD inElectronic and Communications from the
IRCOMlaboratory of Limoges. He joined the CNRS, firstas a
researcher, then as a Professor. Since 2000, hehas been the head of
the Electromagnetic Diffraction(DEM) Team of the XLim laboratory
(formerlythe IRCOM). He was the first to introduce timedomain
methods (FDTD approach) in radar cross-section computation of
complex structures aroundtheir resonant frequencies and in the
modelling of
photoconductors for switching energy or generating short
pulses.