Embed Size (px)
Citation preview

MATEMÁTICA APLICADA – FIGURAS PLANAS
Áreas e Perímetros de Figuras Planas
Quadrado
A = L x L
A = L²
Onde:
A = Área (m², cm², mm²,...)
L = Lado (m, cm, mm, ...)
P = Perímetro
P = L + L + L + L
P = 4 . L
Retângulo
A = b . h
Onde:
A = Área (mm², cm², m², pol², etc.) b = Base (mm, cm, m, pol, etc.) h = Altura (mm, cm, m, pol, etc.)
P = b + h + b + h
P = 2 . b + 2 . h
Onde:
P = Perímetro
1
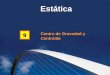
Triângulo
P = a + b + c
Trapézio
P = a + b + c + B P = h + b + c + B
Onde:B = Base maiorb = Base menor
2

Losango
P = L + L + L + L
P = 4 . L
Onde:
D = diagonal maior
d = diagonal menor
Círculo e circunferência
A = . R²
Onde:A = ÁreaR = Raiod = Diâmetro
P = 2 . . R P = . d
Onde:P = Perímetrod = DiâmetroR = Raio = Pi = 3,141592654...
3

Semicírculo
Quadrante
Paralelogramo
A = b x h
P = 2 . (a + b)
4

Teorema de Pitágoras
(OBS.: Só para triângulo retângulo)
“O quadrado da hipotenusa é igual à soma dos quadrados dos catetos”.
Considerando o triângulo retângulo abaixo:
a Hipotenusa (lado oposto ao ângulo reto)
b, c Catetos
OBS.: A soma dos ângulos internos de um triângulo é igual a 180º, neste caso acima, temos:
+ + 90º = 180º
No caso de um triângulo qualquer, temos:
+ + = 180º
5

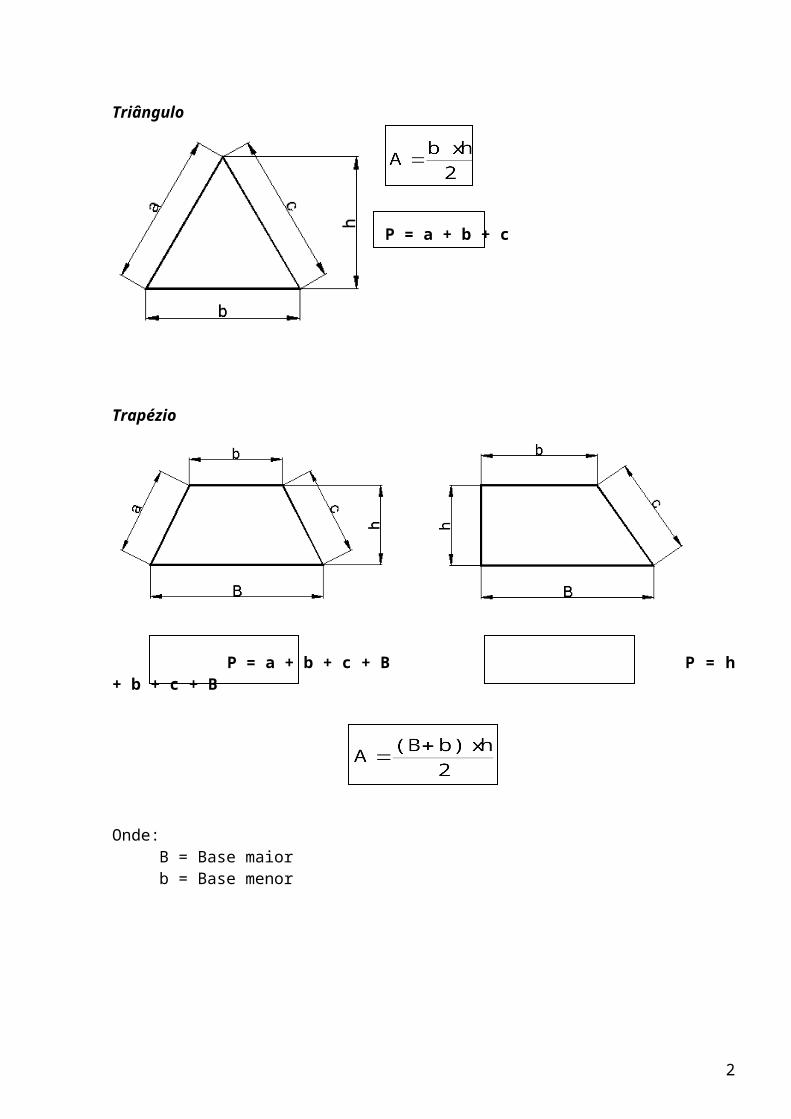
Relações Trigonométricas
6
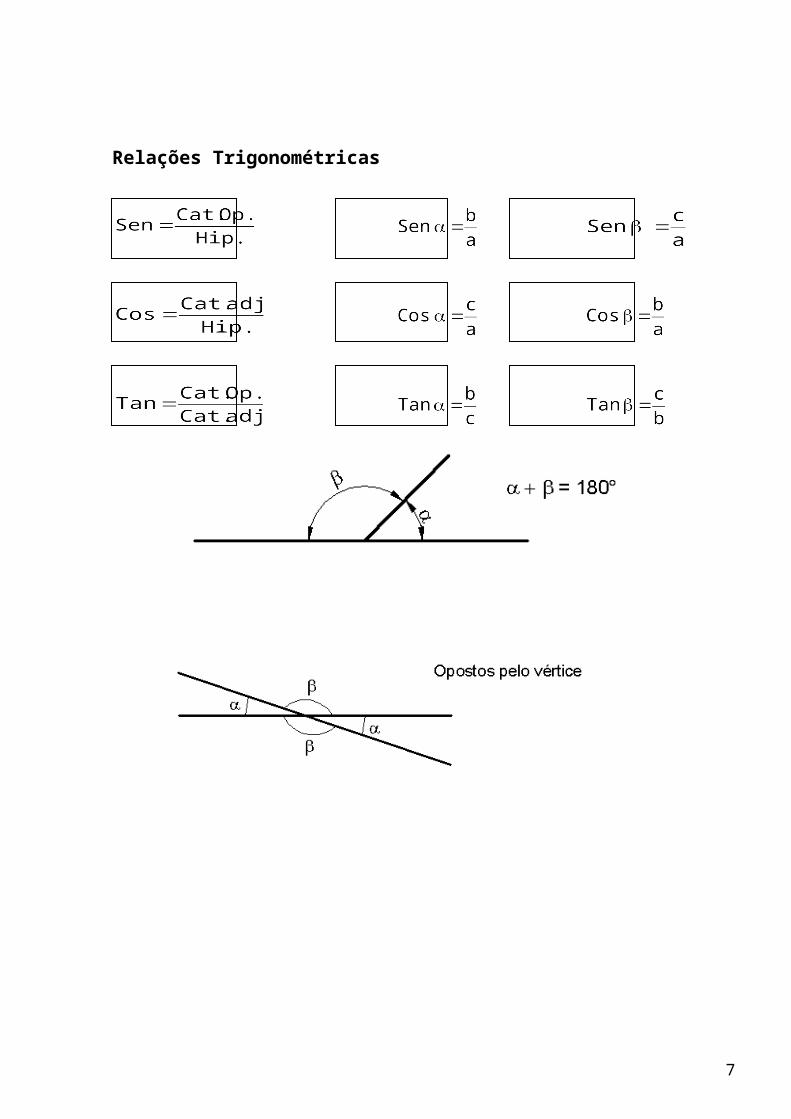
Corda, flecha, segmento circular, setor circular
Corda e flecha
Segmento circular
Setor circular
7
2. MATEMÁTICA APLICADA – CONVERSÃO DE
UNIDADES E GEOMETRIA 3D
Conversão de Unidades
Prefixos do Sistema Internacional de Medidas (SI)
NOME SÍMBOLO FATOR DE MULTIPLICAÇÃO
EXA E 1018 = 1.000.000.000.000.000.000PEPTA P 1015 = 1.000.000.000.000.000TERA T 1012 = 1.000.000.000.000GIGA G 109 = 1.000.000.000MEGA M 106 = 1.000.000QUILO k 103 = 1.000HECTO h 102 = 100DECA da 10DECI d 10-1 = 0,1CENTI c 10-2 = 0,01MILI m 10-3 = 0,001MICRO 10-6 = 0,000 001NANO n 10-9 = 0,000 000 001PICO p 10-12 = 0,000 000 000 001FENTO f 10-15 = 0,000 000 000 000 001ATTO a 10-18 = 0,000 000 000 000 000 001
8

Transformações de Unidades
Quando convertemos unidades do sistema métrico, devemos observar os múltiplos e submúltiplos da unidade:
Tempo
1 min = 60 seg1 hora = 60 min = 3.600 seg1 dia = 24 horas = 1.440 min = 86.400 seg1 ano = 365 dias = 8.760 horas = 525.600 min = 31.536.000 seg
Volume
1 litro = 10-3 m3 = 0,001 m3 = 1 dm3
9
10³ 10² 10¹ 1 10-1 10-2 10-3
Move-se a vírgula para a esquerda
Move-se a vírgula para a direita

Área
1 m² = 100 dm² = 10.000 cm² = 104 cm² = 1.000.000 mm² = 106 mm²1 m² = 0,000001 km² = 10-6 km²
Velocidade
Força
1 kgf = 10 N = 0,001 tf (tonelada-força)
Ângulo
180º = rad
Velocidade Angular
Peso Específico ()
Pressão
Tensão
Comprimento
1 polegada = 1” = 25,4 mm
10

Geometria 3D
Prismas Regulares
Volume de um prisma Regular
V = Ab . h
Onde:
V = Volume (mm³, m³, etc.)Ab = Área da base (mm², m², etc.)h = Altura (mm, m, etc.)
Área superficial total de um prisma regular: É a soma de todas as áreas de todos os lados e superfícies que compõem o sólido, tanto internas como externas.
Exemplos:
a- Prisma Pentagonal b- Paralelepípedo Reto
c- Cubo d- Cilindro
P = x V
11

= P/V
Onde:
P = Peso (kg, N, etc.) = Peso específico (N/m³, kg/m³, kg/mm³, etc.)V = Volume (m³, mm³, etc.)
Obs.: 1 kgf = 9,81 N, mas vamos considerar para efeito de cálculo 1 kgf = 10 N.
3. CENTRÓIDES E MOMENTO DE INÉRCIA3. CENTRÓIDES E MOMENTO DE INÉRCIA
3.1 Centróide
O centróide de área é definido como sendo o ponto correspondente ao centro de gravidade de uma placa de espessura infinitesimal.
De uma maneira bem simples: centróide é o ponto pelo qual, se suspendermos o corpo, ele permanece na horizontal.
Aplicação
No dimensionamento de: polias, correias, engrenagens, parafusos, eixos, vigas, etc.
Centróides de superfícies planas simples
O centróide de área é definido por duas coordenadas, expresso pelas seguintes equações matemáticas:
12

a)
b)
Onde:
= coordenada do centróide em relação ao eixo das abscissas (X); (mm, cm, etc).
= coordenada do centróide em relação ao eixo das ordenadas (Y); (mm, cm, etc.).
dAi = área de um elemento infinitesimal
Xi e Yi = coordenadas do centro do elemento infinitesimal; (mm, cm, etc.).
i = índice de cada elemento infinitesimal, variando de 1 até n
n = número de elementos infinitesimais (trabalha sempre conjugado com i, começando sempre de 1).
Obs.:
a) Alguns autores consideram Xc e Yc como sendo as coordenadas de centróide ao invés de e .
b) Para algumas figuras, é óbvia a posição do centróide; assim, se a figura for simétrica, como o círculo ou o quadrado, por exemplo, o centróide coincide com o centro geométrico da figura.
Centróides de Figuras Compostas
A maioria das figuras utilizadas em engenharia são compostas de combinações das formas geométricas simples, conforme discutidas no item anterior. A localização dos centróides de elementos estruturais é dada em manuais.
Quando uma figura pode ser divida em elementos finitos, estes elementos podem ser tratados da mesma forma, como se fossem elementos infinitesimais. Quando isto é feito, o processo é chamado de somatória finita; em contraposição à integração, basicamente uma somatória de elementos finitos.
13

O centróide de uma figura composta é determinado pela aplicação das equações, vistas no item anterior, onde as áreas elementares tornam-se áreas de formatos geométricos definidos, nos quais a área total foi dividida.
Além das formas geométricas, mostradas na tabela em anexo, outras seções comumente utilizadas são os perfis laminados, onde as áreas e a posição dos centróides, de tais seções, são mostradas nos manuais dos fabricantes.
Importância dos Centróides
Na Resistência dos Materiais, vê-se a enorme importância da localização do centróide de uma área como, por exemplo, sabe-se que para produzir uma distribuição uniforme de tensões, as cargas devem ser aplicadas de tal modo que a linha de ação de sua resultante coincida com o centróide da seção reta do componente. A posição do centróide de uma área é também importante para determinar a localização do eixo neutro (linha ao longo da qual as tensões são nulas) passa através do centróide da seção reta da viga.
Um eixo, que passa através do centróide de uma área, é conhecido como eixo centroidal. O próximo assunto, relacionado com momentos de inércia, colocará em destaque a enorme importância da posição do eixo centroidal de áreas. Muitas outras aplicações, onde a sua importância é manifestada, aparecerão com o prosseguimento dos estudos em engenharia.
Centróide das Figuras Planas
Figuras
1- Semicírculo
0
2- Retângulo b / 2 h / 2
14

3- Triângulo qualquer
b / 3 h / 3
Centróide das Figuras Planas
Figuras
4- Quadrado
a / 2 a / 2
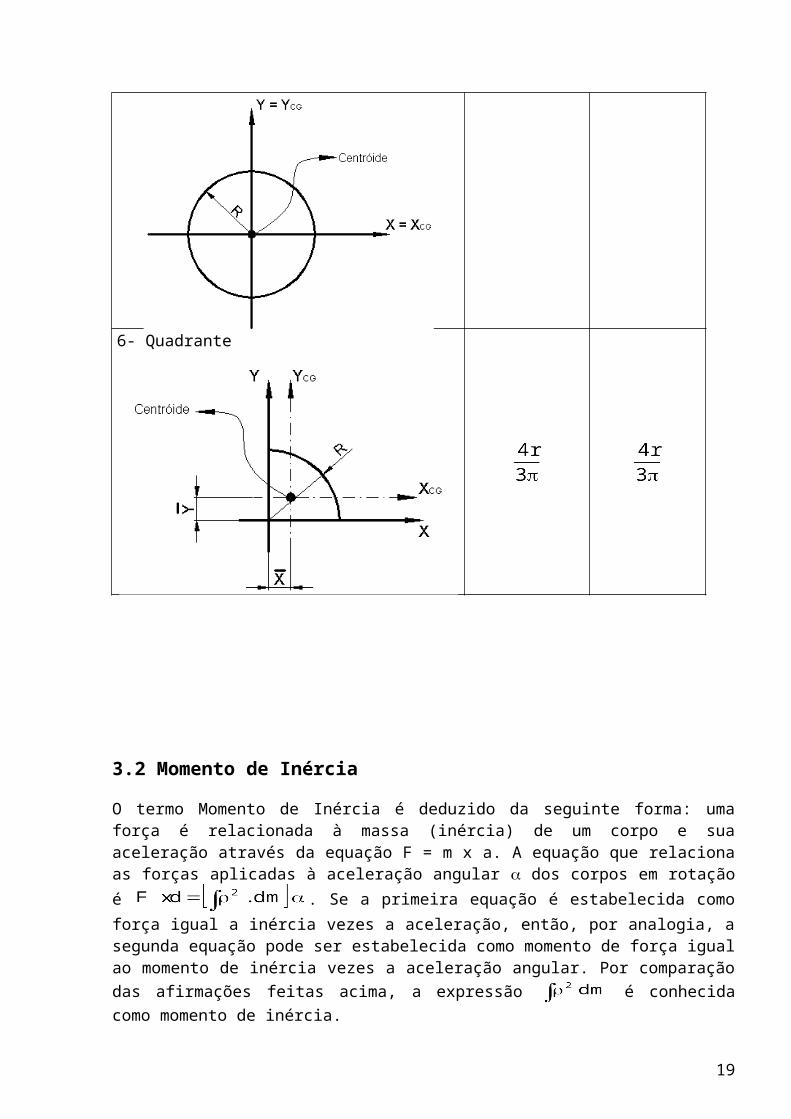
5- Círculo 0 0
15

6- Quadrante
3.2 Momento de Inércia
O termo Momento de Inércia é deduzido da seguinte forma: uma força é relacionada à massa (inércia) de um corpo e sua aceleração através da equação F = m x a. A equação que relaciona as forças aplicadas à aceleração angular dos corpos em
rotação é . Se a primeira equação é estabelecida como força igual a
inércia vezes a aceleração, então, por analogia, a segunda equação pode ser estabelecida como momento de força igual ao momento de inércia vezes a aceleração angular. Por comparação das afirmações feitas acima, a expressão é conhecida como momento de inércia.Do mesmo modo, para áreas, a expressão é conhecida como momento de inércia.
Muitas fórmulas da engenharia, cada uma das quais relacionada à resistência de vigas, colunas e flexão de vigas, envolvem o uso desta expressão matemática, onde é a
16

distância perpendicular desde dA até seu eixo de inércia. O momento de inércia aplicado às áreas não tem significado físico quando examinado por si só; é meramente uma expressão matemática, geralmente representado pelo símbolo I. Entretanto, como
na fórmula de flexão para a tensão de vigas, , começa a ter significado. A
definição matemática do momento de inércia, , indica que uma área é dividida em pequenas partes, tais como dA, e cada área é multiplicada pelo quadrado de seu braço de momento em relação ao eixo de referência. Na figura 01, (x,y) são as coordenadas da área diferencial dA, portanto, o momento de inércia em relação ao eixo x é o somatório dos produtos de cada dA pelo quadrado de seu braço de momento y, ou seja: . Da mesma forma, o momento de inércia em relação ao eixo y é dado
por:
O momento de inércia (de área) é chamado algumas vezes de segundo momento de área, por que cada área diferencial multiplicada pelo seu braço de momento dá o momento de área.Quando multiplicado pela segunda vez por seu braço de momento, dá o momento de inércia. O termo "segundo momento de área" é preferível à expressão "momento de inércia"; a última torna-se confusa quando aplicada a uma área que não tenha inércia (massa), pois na realidade temos o momento de inércia de área e o momento de massa, sendo que o primeiro tem aplicação em projetos estruturais, enquanto que o momento de inércia de massa é aplicado na dinâmica dos corpos rígidos. O desenvolvimento de ambos é semelhante em muitos aspectos, mas suas funções são bem diferentes.
Definição
É o número que mede a facilidade de um corpo entrar em movimento de rotação em torno de um referencial. Quando maior o momento de inércia, maior é a dificuldade do corpo entrar em rotação, e ele depende de: massa do corpo, distribuição da massa e do referencial.
17

Tipos
Momento de Inércia Polar
- O referencial é um ponto;- Aplicação: dimensionamento de órgãos de máquinas submetidos a esforços de torção.
Momento de Inércia Axial
- O referencial é um eixo;- Aplicação: dimensionamento quanto a:
* Flexão;* Flambagem;* Torção Composta.
Momento de Inércia Planar
- O referencial é um plano;- Aplicação: não tem aplicação na engenharia.
Unidades e Sinais
Observando a integral , nota-se que é um termo de quarta dimensão, porque ela é composta de uma distância ao quadrado, multiplicada por uma área. Uma unidade dimensional conveniente de I é o centímetro à quarta (cm4), ou metro à quarta (m4), ou ainda, o milímetro à quarta (mm4).
O sinal de I é, obviamente, independente do sinal do braço de momento L, já que se L for negativo, elevando-o ao quadrado se toma um número positivo e dependente inteiramente do sinal da área. É considerada uma área positiva aquela que aumenta a área de uma figura, e negativa, aquela que reduz. Para uma área total, o momento de inércia deve ser sempre positivo.
18
Teorema dos Eixos Paralelos (Teorema de Steiner)
Em geral, é necessário transferir o momento de inércia de um eixo para outro paralelo. Na figura 02, sejam x e y, os eixos coordenados retangulares que passam por um ponto qualquer O no plano da figura. Também temos x' e y' eixos paralelos aos primeiros (x e y, respectivamente), que passam pelo centróide C, de uma área, conforme mostrado na figura 02. A fórmula de transferência (Teorema de Steiner) proporciona um método para se fazer tal transferência, sem a utilização da integração adicional. Por exemplo, na figura 02, o momento de inércia retratado na equação
, onde = y + b (que no caso é a distância do centróide ao eixo paralelo s). Portanto, substituindo os valores correspondentes na equação, teremos o momento de inércia da área relativamente ao eixo dos x, como sendo:
. Resolvendo a equação virá:
, onde:
= momento de inércia de área em relação ao eixo centroidal;
= momento estático em relação ao eixo centroidal;
= área total da figura.
Escreve-se b fora do sinal de integração porque é uma constante que representa a distância que separa os eixos xCG e X. A segunda integral do lado direito da equação desenvolvida torna-se zero porque , onde representa a distância do eixo x ao centróide. Neste caso, tem o valor zero, pois passa pelo centróide. Finalmente a equação se reduz a:
, onde:
Ix = momento de inércia em relação ao eixo x;
19

= momento de inércia em relação ao eixo xCG ou, momento de inércia em relação ao centróide da figura de coordenada A = área da figura;d = distância entre eixos (xCG e x no caso);
Com o mesmo raciocínio: , que é a equação referente ao momento de inércia da área relativamente ao eixo dos y.
Estas equações representam o chamado "Teorema dos Eixos Paralelos" para momentos de inércia de figuras planas, tendo o seguinte significado físico: O momento de inércia de uma área plana relativamente a qualquer eixo em seu plano é igual ao momento de inércia relativamente a um eixo paralelo que passa pelo centróide mais um termo de transferência composto do produto da área total pelo quadrado da distância entre os dois eixos.
Esta propriedade torna possível a determinação do momento de inércia de uma área em relação a um dado eixo, conhecendo-se o valor do momento de inércia dessa área em relação a um eixo centroidal de mesma direção e, inversamente, ela possibilita que se determine o momento de inércia , de uma área A em relação ao eixo baricêntrico xCG quando se conhece o momento de inércia Ix da área em relação a um eixo paralelo, subtraindo-se de Ix a parcela Ad², ou seja: . Verifica-se que, quanto mais distanciado um eixo estiver do centróide de uma área, tanto maior será o momento de inércia da área relativamente àquele eixo.
Observe também, cuidadosamente, que o eixo centroidal envolvido na fórmula de transferência (Teorema de Steiner), é sempre o eixo centroidal da área usada no termo de transferência Ad², ou ainda, o Teorema dos Eixos Paralelos só pode ser usado se um dos eixos for um eixo centroidal.
Síntese do Teorema de Steiner
Momentos de inércia em relação aos eixos que passam pelo centróide da figura.
Em relação a “X”:
ou
20

Já que; d =
Em relação a “Y”:
ou
Já que; b =
Ix = Momento de inércia em relação ao eixo x (mm4)Iy = Momento de inércia em relação ao eixo y (mm4)
= Momento de inércia em relação ao eixo xCG (sendo xCG // x) ( mm4)= Momento de inércia em relação ao eixo yCG (sendo yCG // y) (mm4)
A = Área total da figura (mm²)“d” e “ “ = Distância entre os eixos “x” e “xCG” (mm)“b” e “ “ = Distância entre os eixos “y” e “yCG” (mm)
21

Momento de Inércia das Figuras Planas
Figuras Ix Iy (IxCG) (IyCG)
1- Quadrado
2- Retângulo
3- Triângulo qualquer
22

Figuras Ix Iy (IxCG) (IyCG)
4- Círculo
5- Semicírculo
6- Quadrante
23

Exercícios
Para cada exercício a seguir, calcule:
-
- Ix,
Obs.: Todas as medidas estão em “mm”
1- 2-
= 123,69º = 75,96375653
3- 4-
= 130,60129465º = 53,1301024º
24
0

5- 6-
7- 8-
= 26,5650512º
9-
= 59,0362435º = 29,89890184º
25

10- Calcular as coordenadas do centro de gravidade ( ) das figuras a seguir e calcular também o momento de inércia em relação ao eixo que passa pelo centróide das mesmas ( ).a- b-
c- d-
e- f-
β = 20,22485943°
26