-
74 INTERNATIONAL JOURNAL OF COMPUTATIONAL COGNITION
(HTTP://WWW.YANGSKY.COM/YANGIJCC.HTM), VOL. 3, NO. 2, JUNE 2005
Architectures of Computational Verb Controllers:Towards a New
Paradigm of Intelligent Control
Tao Yang
Abstract There are at least two kinds of methods of
designing(computational) verb proportional-integral-derivative(PID)
con-trollers. The first one is to generalize fuzzy PID
controllersby substituting BE in fuzzy control rules with
non-staticcomputational verbs. The second one is to directly
constructevolving functions of verbs in human experiences of
dynamicprocesses. These methods will lead to different
architectures ofverb PID controllers because computational verb
theory can beused in different situations where adjectives or noun
phraseshave different computational interpretations. Three examples
ofthese computational interpretations of nouns are crisp, fuzzy
andprobabilistic. Correspondingly, a PID controller can be
designedbased on crisp or fuzzy representations of human
experiences. Ifthe dynamic aspects of these human experiences are
emphasizedexplicitly, the resulting design principle must take
advantage ofthe computational verb theory. This is the principle
behind thearchitectures of the verb PID controllers. The basics of
fuzzylogic and fuzzy PID controllers can help the reader to
understandthis paper. However, the fuzzy logic is only one of at
least threemethods of interpreting computational nouns used
together withcomputational verbs. Therefore, fuzzy logic is not an
essentialcomponent for designing computational verb controllers
thoughit is a very helpful component.
In this paper, a detailed method of designing verb
PIDcontrollers by generalizing fuzzy PID controllers are
presented.The static and local fuzzy rules are transformed into
dynamic andglobal verb rules by representing fuzzy rule sets on
phase plots.The control trajectories are chunked into a set of
computationalverbs based on the dynamic experiences generated by
therelations among a group of fuzzy control rules. Using
thesecomputational verbs, three sets of control rules, respectively
forP-, I- and D-components, based on computational verbs(verbrules
for short) are generated from the dynamic experiencesmodelled by
using mental experiments. To implement these verbrules, verb
implication relations are constructed based on verbsimilarity
functions which are generated based on a set ofstandard verbs for
modelling dynamic experiences. The last stepto implement verb PID
controllers is to calculate the control verbbased on the observe
verb and verb rule inference called verbgeneralized modus
ponens(GMP). The results of a verb GMP isa verb similarity which is
the union of a set of verb similarityfunctions modified by verb
rule firing adverbs. At the symboliclevel, the resulting verb
similarity of a verb GMP correspondingto a control verb. The
control verb must be deverbified intoa conventional control signal
before the control loop can beclosed in the physical world.
Simulation results for controlling adelayed second-order process
are used to demonstrate the designprocesses for verb P-, PD- and
PID controllers. Copyright c 2004-
Manuscript received October 21, 2003; revised February 13, 2004;
July 15,2004.
Department of Electrical Engineering and Computer Sciences,
YangsScientific Research Institute, 1303 East University Blvd. #
20882 Tucson,Arizona 85719-0521, USA. Email:
[[email protected]]
Publisher Item Identifier S 1542-5908(05)10210-3/$20.00Copyright
c2004-2005 Yangs Scientific Research Institute, LLC.All rights
reserved. The online version posted on June 1, 2004
athttp://www.YangSky.com/ijcc32.htm
2005 Yangs Scientific Research Institute, LLC. All rights
reserved.
Index Terms Intelligent control, computational verb,
PIDcontroller, verb controller, fuzzy theory, verb similarity,
verbinference, verb reasoning, fuzzy controller, PID
controller.
I. INTRODUCTION
WE sometimes feel more conformable to manipulate ourown
languages than formal logic or numbers, this isat least my personal
feeling and I think it is shared by manyothers. With a background
of control engineering, sometimesI asked myself: What is an
intelligent controller? Or in a moregeneral context, what an
intelligent system should be? Finally,I gave up my efforts of
casting a comfortable definition ofintelligence because its meaning
is a verb collapse[18] ofa verb phrase1 become intelligent that has
no truth valueof any sort unless it is dead[15]. Since either the
intelligenceof each individual or the collective intelligence of
the entirehuman society evolves continuously along time, we
alwayson the course of becoming intelligent. It will be hopelessto
imagine the verb collapse of become intelligent forour current
society, therefore, it will be hopeless to defineintelligence.
Instead, I use a poor mans working definitionof intelligence as
follows.
Poor mans working definition of intelligent sys-tems. An
intelligent system reduces the mental stressof achieving a goal.
The most intelligent system is ahuman individual in the sense that
one can reducesthe mental stress to a minimum amount, which isused
to generate a verbal command, by asking otherperson to achieve a
goal. Therefore, the smartestman-made system must have the ability
to groundnatural languages.
The definition above is in fact the reason for the initiativeof
computational verb theory. To the best knowledge of theauthor,
before the initiative of computational verbs[4], [5],there was no
systematic implementation of verbs in engineer-ing problems. As
addressed in the newly developed physicallinguistics[18], [21], we
have already systematically usedfuzzy theory[23] and probabilities
to implement adjectives andnoun phrases for different kinds of
engineering problems. Incontrast to the maturation of the paradigms
that engineersused to cope with adjectives and noun phrases, the
infancy ofcomputational verb theory, which is the only existing
paradigm
1Here we will use verb phrase and verb interchangeable because
weonly emphasize the dynamics modelled by natural languages. The
ways ofrepresenting these dynamics in natural languages are not our
main interest.
-
YANG, ARCHITECTURES OF COMPUTATIONAL VERB CONTROLLERS 75
for making verbs computable, is extremely striking. The hugegap
between the degrees of maturities of these two kinds ofparadigms
comes with the following reasons.
1) Static versus dynamic. With the current
mainstreamarchitecture of computers, a piece of knowledge is
morelikely to be implemented by a set of static tokens;namely,
members of a formal symbolic system. Torepresent a piece of dynamic
knowledge such as a videoclips, huge amount memory is needed. Only
recentlycomputer systems can offer cheap and fast solutionsto
partially solve this problem. We still feel painfulto manipulate a
computer to recall a piece of visionmemory while we feel painless
to recall a smiling facialexpression anytime and anyplace. However,
with thefuture development of cognitive computers, computerscan
gain more and more the ability of handling dynamicknowledge. This
tendency might be helpful to solve theconflict between static and
dynamic representations.
2) Rational versus irrational. A theory needs to preservetruth
in order to be scientific based on repeatablemeasurements or to be
formal based on mental de-duction. However, verbs intrinsically
have nothing to sayabout truth. Verbs represent irrational aspects
of humanthinkings. It is not comfortable to handel verbs in
ascientific framework if we do not find a way to bridgerational
symbolic systems and the irrational aspects ofthoughts. In
computational verb theory, a mechanismor hardware called
machinself2 was used to functionas the irrational aspects of human
thoughts. One of themain focus of computational verb theory is to
implementirrational aspects of human intelligence into
man-mademachines.
3) Linguistics versus engineering. When a control engi-neer try
to design or adjust the parameter settings ofa controller, what in
the mind is the design detailsand often the fact that these details
are described byusing sentences in natural languages in many
occasionsis ignored. Since the intrinsic ambiguities in
naturallanguages, the tradition of pursuing accuracy in
bothsciences and specially in engineering prevent naturalscientists
and engineers from designing in natural lan-guage terms. On the
other hand, linguists rarely thoughtabout there are many natural
language statements inengineering problems need their expertise.
Since thishistorical gap between linguistics and engineering,
manylinguistic problems in engineering were solved usinginefficient
tools such as numerical problem solvers.
As the first try of a paradigm shift for solving
engineeringproblems using verbs, the computational verb theory
andphysical linguistics have undergone a rapid growth since
thebirth of computational verb in the Department of Electrical
En-gineering and Computer Sciences, University of California
atBerkeley in 1997[4], [5]. The paradigm of implementing verbsin
machines were coined as computational verb theory[18].The building
blocks of computational theory are computationalverbs[13], [8],
[6], [14], [19]. The relation between verbs
2It was coined from machine and itself [5].
and adverbs was mathematically defined in [7]. The
logicoperations between verb statements were studied in [9].
Theapplication of verb logic to verb reasoning is addressed in
[10]and further studied in [18]. A logic paradox was solved basedon
verb logic[15]. The mathematical concept of set was gener-alized
into verb set in[12]. Similarly, for measurable attributes,the
number systems can be generalized into verb numbers[16].The
applications of computational verbs to predictions werestudied in
[11]. The applications of computational verbs todifferent kinds of
control problems were studied on differentoccassions[17], [18]. In
[20] fuzzy dynamic systems were usedto model a special kind of
computational verb that evolvesin a fuzzy space. The relation
between computational verbtheory and traditional linguistics are
studied in [18], [21]. Theprimary application of computational
verbs to P-controllerscan be found in [22].
Conventional and fuzzy PID controllers were widely usedin many
engineering applications and consumer products[1]and of great
importance to practical engineering processes.Enormous amount of
experiences had been accumulated in thedesign of different kinds of
PID controllers. My thesis here isto take advantage of the
intelligence in human dynamic experi-ences such that the design of
PID controllers can embed moreflexibility that natural languages
can offer. Here the designprinciples of verb PID controller will be
addressed under amore systematic framework. A primary design
example canbe found in [22].
The organization of this paper is as follows. In Section IIthe
basics of the design of PID controllers will be presentedto make
this paper self-contained. In Section III the com-putational verb
rules and computational verb inference willbe studied for the
purpose of implementing verb controllersbased on verb rules. In
Section IV, the verb PID controllers aredesigned based on the
generalization of fuzzy gain schedulersof PID controllers. In
Section V, some concluding remarks aregiven.
II. BASICS OF PID CONTROLLERS
D-ComponentKd (t)
P-ComponentKp (t)
I-ComponentKi (t)
Plant/Process
r(t) +
-
e(t) +++
u(t) y(t)
PID-Controller
Fig. 1. The block diagram of a conventional PID controller in
the closedloop.
The block diagram of a conventional
proportional-integral-derivative(PID) controller in the closed loop
is shown in Fig. 1where r(t) is a reference signal, y(t) is the
output, e(t) ,r(t) y(t) is the control error, and u(t) is the
control signal.The PID-controller consists of three components;
namely, a P-component with a parameter Kp(t) called proportional
gain,
-
76 INTERNATIONAL JOURNAL OF COMPUTATIONAL COGNITION
(HTTP://WWW.YANGSKY.COM/YANGIJCC.HTM), VOL. 3, NO. 2, JUNE 2005
an I-component with a parameter Ki(t) called integral gain,and a
D-component with a parameter Kd(t) called derivativegain. The
control law is defined by a mapping between u(t)and e(t) and is
given by the following linear combination inthe time domain
u(t) = Kp(t)e(t) +Ki(t) t0
e()d +Kd(t)de(t)dt
. (1)
If we implement the PID controllers by using digital
pro-cessors, the following discrete-time form of PID controller
isuseful
u(k) = Kp(k)e(k) +Ki(k)Tski=0
e(i) +Kd(k)Ts
e(k) (2)
where Ts is the sampling period for the digital controller,
u(k)and e(k) are the control signal and the error at the
samplingmoment kTs, respectively. Kp(k),Ki(k), and Kd(k) are
theproportional, integral and derivative gains at the
samplingmoment kTs, respectively. And we define the change of
errorduring the sampling interval [(k 1)Ts, kTs] as e(k) ,e(k) e(k
1).
The authors of [2] lumped fuzzy PID controllers into atleast 4
categories, here we only consider the implementationof the
gain-scheduling fuzzy PID controllers of which theblock diagram is
shown in Fig. 2. Observe that in Fig. 2the parameters of the PID
controller are tuned by the fuzzyinference engine.
D-ComponentKd (t)
P-ComponentKp (t)
I-ComponentKi (t)
Plant/Process
r(t) +
-
e(t) +++
u(t) y(t)
PID-Controller
Fuzz
y ru
les
and
reas
on
ing
Fuzz
ifica
tion
Def
uzz
ifica
tion
Fuzzy inference engine
Fig. 2. The block diagram of a fuzzy PID controller, in which
the gain-scheduling control strategy is used, in the closed
loop.
As presented in Chapter 6 of Reference [18] that thestructure of
a verb PID controller corresponding to the fuzzyPID controller in
Fig. 2 can be easily constructed as shown inFig. 3. The striking
similarity between a fuzzy PID controllerand a verb PID controller
results from the fact that the onlyverb used in fuzzy logic;
namely, BE is a special kind ofverb called static verb. However, as
shown in the existingexamples of verb controllers[18], [22] the
design principlesare dramatically different between these two kinds
of PID
controllers. First, the output of the verbification block isa
verb observe. The verb inference is based on verb GMPfirst
presented in Section 5.3.3 of Reference [18]. However,since the
original verb GMP, which is only one of manypossible verb GMPs, was
based on the collapses of verbs,we need to develop a new verb GMP
based on the methodpresented in the examples in [22]. Before we can
present thedesign details of verb PID controller, we need to review
somebasics of (computational) verb rules and (computational)
verbinference.
D-ComponentKd (t)
P-ComponentKp (t)
I-ComponentKi (t)
Plant/Process
r(t) +
-
e(t) +++
u(t) y(t)
PID-Controller
Ver
b ru
les
and
reas
on
ing
Ver
bific
atio
n
Dev
erbi
ficat
ion
Verb inference engine
Fig. 3. The block diagram of a computational verb PID controller
in theclosed loop.
III. COMPUTATIONAL VERB RULES AND COMPUTATIONALVERB
INFERENCE
In the context of engineering applications, the definition
ofcomputational verb in [18] is too complex to be operational.A
light working definition of computational verb is used here.
Computational Verb. A computational verb V isdefined by the
following evolving function
EV : T (3)where T j R and j Rn are the time and theuniverse of
discourse, respectively.
A. Canonical Computational Verbs for Verb PID ControllersIn
order to ease the implementations of verb PID controllers
by using VLSI chips, we need to minimize the number ofdifferent
verbs used in a verb controller. One way to dothis is to choose a
few canonical computational verbs[13]for different kinds of
controllers. From the design example in[22] we know that in verb
PID controllers, only one canonicalcomputational verb; namely,
become, is needed.
In the context of verb PID controller, the canonical formof verb
become can be represented as become(state 1,state 2) where state 1
and state 2 can be crisp orfuzzy numbers or a special value
current. Some examples
-
YANG, ARCHITECTURES OF COMPUTATIONAL VERB CONTROLLERS 77
of becomes are listed in Table I. Observe from Table I thatthe
canonical forms of verb statements can be implementedby rich
variations of verb statements in which different kindsof
adverbs/adverbials might be used. In the canonical formslisted in
Table I, the symbol denotes an operation betweenan adverb/adverbial
and a computational verb[7]. Also observethat as a special case of
verb statements, the fuzzy statementsin the last two rows of Table
I can also be represented bycanonical forms in become.
B. Verb SimilarityThe similarity between verbs(verb similarity,
for short) is
of the essential importance to the inference of verb
rules[18].Since there is no crisp definition of similarity between
twodynamic systems, the verb similarity can be defined based onmany
different concerns as addressed in [18]. Therefore, ratherthan give
a closed form of the definition of verb similarity, theboundary
conditions are used to define it as follows.
Verb Similarity. Given two computational verbs V1and V2, the
verb similarity S(V1,V2) should satisfythe followings.
1) S(V1,V2) [0, 1];2) S(V1,V2) = S(V2,V1);3) S(V1,V2) = 1 if V1
= V2 almost everywhere,
where V1 = V2 means both computationalverbs have the same
evolving function.
For the purpose of the design of digital verb controllers,we
only consider the cases when the evolving functions ofthe
computational verbs are discrete-time samples. Let twocomputational
verbs V1 and V2 with normalized evolvingfunctions EV1(k) [0, 1],
EV2(k) [0, 1],k Z, then threeverb similarities are listed in Eqs.
(4), (5) and (6)(see nextpage).
Observe that when both computational verbs are dead;namely,
EV1(k) = EV2(k) = 0, k, then we define theirsimilarity as 0.
Otherwise, the verb similarities in Eqs. (4)and (5) can only be 0
when one of EV1(k) and EV2(k) is zerofor all k. In summery, when at
least one of EV1(k) and EV2(k)is 0 for all k, then the verb
similarities (4) and (5) are zero.
C. Verb Inference with Single Verb RuleThe process of evaluating
a verb statement is called verb
inference. In the design of verb controllers, we will use
verbgeneralized modus ponens (GMP). In verb GMP, when a verbIF/THEN
rules and its antecedent, which is a verb statement,are
approximately matched, a consequent, which is also a verbstatement,
may be inferred. If we only consider one verb rule,a verb GMP can
be formally written as
IF NP1 Vx0, THEN NP2 Vy0.NP1 V1
NP2 V2 (7)where NP1 and NP2 denote two noun phrases and V1 is
anobserved verb matching the antecedent computational verb to
a verb similarity. All computational verbs above the line
areconsidered known, whereas the computational verb blow theline;
namely, V2 is considered unknown. A (computational)verb rule can be
analytically represented by a verb implicationrelation. In verb
relations we consider pairs or more generallyn-tuples related to a
degree of verb similarity. In contrast tothe question of whether
some verb belongs to a verb set maybe considered a matter of degree
of verb similarity, whethersome verbs are associated may also be a
matter of degree ofverb similarity. In computational verb theory,
computationalverb relations play roles much like relation functions
do inconventional approaches.
A computational verb relation R is defined over the Carte-sian
product of two or more verb sets. For this moment let usonly
consider verb relations defined over the Cartesian productof two
verb sets Vx and Vy . Here we assume that both verbsets have only
finite number of computational verbs as
Vx = {Vx0,Vx1, . . . ,Vxm},Vy = {Vy0,Vy1, . . . ,Vyn}. (8)
Let a binary verb relation R defined on VxVy , then we canlist
all its pairs explicitly as follows
R = {((Vx,Vy), R(Sx(Vx0,Vx), Sy(Vy0,Vy)))},R =
(Vx,Vy)VxVy
R(Sx(Vx0,Vx), Sy(Vy0,Vy))/(Vx,Vy)
(9)where every pair (Vx,Vy) belongs to Vx Vy , Sx(, ) andSy(, )
are two verb similarities, Vx0 and Vy0 are referencecomputational
verbs, R : [0, 1] [0, 1] [0, 1] is calleda verb relation operator.
Some examples of verb relationoperators are as follows.
R(x, y) = x y, (10)R(x, y) = (x y) (1 x), (11)R(x, y) = x y,
(12)R(x, y) = 1 (1 x+ y), (13)
R(x, y) = (1 x) y, (14)R(x, y) = 1 x+ x y, (15)R(x, y) = 0 (x+ y
1), (16)
R(x, y) ={
1, if x y,y, if x > y, (17)
R(x, y) ={
1, if x y,y/x, if x > y, (18)
R(x, y) ={
1, if x y,0, if x > y, (19)
R(x, y) =
x, if y = 1,y, if x = 1,0, if x < 1, y < 1. (20)Observe
that methods of calculating verb similarities might
be different if qualitative behaviors of the computational
verbsin the associated computational verb pairs are different.
Verb
-
78 INTERNATIONAL JOURNAL OF COMPUTATIONAL COGNITION
(HTTP://WWW.YANGSKY.COM/YANGIJCC.HTM), VOL. 3, NO. 2, JUNE 2005
TABLE IEXAMPLES OF VERB STATEMENTS AND THEIR CANONICAL FORMS IN
become.
Verb statements Canonical forms in become|e(k)| decreases
become(current, less than current)|e(k)| decreases to small
become(current, small)|e(k)| increases to ten become(current less
than ten, ten)|e(k)| increases from small to big become(small,
big)|e(k)| decreases from 10 to 0.01 become(10, 0.01)|e(k)| climbs
very fast (very fast) become(current, bigger than current)|e(k)|
jumps up (very fast) become(current, bigger than current)|e(k)|
bounces back become(current, before current)|e(k)| stays high
become(high, high)|e(k)| is high become(high, high)
S(V1,V2) =
1
nk=0
|EV1(k) EV2(k)|n
k=0
EV1(k) + EV2(k),
nk=0
EV1(k) + EV2(k) 6= 0,
0, otherwise.
(4)
S(V1,V2) =
1
nk=0
[EV1(k) EV2(k)]2 nk=0
[EV1(k) + EV2(k)]2,
nk=0
[EV1(k) + EV2(k)]2 6= 0
0, otherwise.
(5)
S(V1,V2) =
nk=0
EV1(k) EV2(k)n
k=0
EV1(k) EV2(k),
nk=0
EV1(k) EV2(k) 6= 0,
0, otherwise.
(6)
relation operators must be chosen with the following
concernsbeing taken care of.
1) To choose a proper method of calculating computationalverb
similarity such that the degree of verb similarity hasa well
defined relation to the quantitative and qualitativechanges of the
system behaviors.
2) Must be consistent with dynamic experiences of
humanbeings.
3) If conflictions shall arise when a verb relation operatoris
used to handle dynamic experiences, then the conflic-tions must be
resolved by using new verb similaritiesand/or by adding new
computational verb relations.
As an example of verb relation, let us consider the
followingexperiences
1. IF |e(t)| decreases, THEN Kp increases;2. IF |e(t)| decreases
fast,
THEN Kp increases slowly;3. IF |e(t)| decreases very fast,
THEN Kp increases very slowly. (21)
In this example, we have
Vx = {decrease, decrease fast, decrease very fast},Vy =
{increases, increases slowly,
increases very slowly}. (22)Assume that we can choose two verb
similarities, Sx(, )
and Sy(, ) such thatSx(decreases, decreases) > Sx(decreases,
decreases fast)> Sx(decreases, decreases very
fast),Sy(increases, increases) > Sy(increases, increases
slowly)> Sy(increases, increases very slowly). (23)
Let us assume that in the rule set (21) we choose the firstrule
as the reference rule, which sets the basic tune of
thequalitatively invariant property behind the rule set. The
secondand the third rules only entail the first rule. Therefore,
for verbsimilarities Sx and Sy we can choose computational
verbsdecrease and increase as the reference verbs,
respectively.Therefore, verb rule set (21) gives a way of
associating threegroups of verb phrases, this can be defined by a
verb relationas in Table II. If the verb relation operator (10) is
chosen, thenthe verb relation is given by Table III.
-
YANG, ARCHITECTURES OF COMPUTATIONAL VERB CONTROLLERS 79
TABLE IIA VERB RELATION FOR MODELLING THE ASSOCIATION BETWEEN
TWO KINDS OF DYNAMICS . ONE FOR THE ERROR SIGNAL |e(t)| AND THE
OTHER FOR
PROPORTIONAL GAIN Kp .
R(1, 1)/(decrease, increase)R(1, Sy(increase, increase
slowly))/(decrease, increase slowly)R(1, Sy(increase, increase very
slowly))/(decrease, increase very slowly)R(Sx(decrease, decrease
fast), 1)/(decrease fast, increase)R(Sx(decrease, decrease fast),
Sy(increase, increase slowly))/(decrease fast, increase
slowly)R(Sx(decrease, decrease fast), Sy(increase, increase very
slowly))/(decrease fast, increase very slowly)R(Sx(decrease,
decrease very fast), 1)/(decrease very fast,
increase)R(Sx(decrease, decrease very fast), Sy(increase, increase
slowly))/(decrease very fast, increase slowly)R(Sx(decrease,
decrease very fast), Sy(increase, increase very slowly))/(decrease
very fast, increase very slowly)
TABLE IIIA VERB RELATION FOR MODELLING THE ASSOCIATION BETWEEN
TWO KINDS OF DYNAMICS . ONE FOR THE ERROR SIGNAL |e(t)| AND THE
OTHER FOR
PROPORTIONAL GAIN Kp . THE VERB RELATION OPERATOR (10) IS
CHOSEN.
1/(decrease, increase)Sy(increase, increase slowly)/(decrease,
increase slowly)Sy(increase, increase very slowly)/(decrease,
increase very slowly)Sx(decrease, decrease fast)/(decrease fast,
increase)min(Sx(decrease, decrease fast), Sy(increase, increase
slowly))/(decrease fast, increase slowly)min(Sx(decrease, decrease
fast), Sy(increase, increase very slowly))/(decrease fast, increase
very slowly)Sx(decrease, decrease very fast)/(decrease very fast,
increase)min(Sx(decrease, decrease very fast), Sy(increase,
increase slowly))/(decrease very fast, increase
slowly)min(Sx(decrease, decrease very fast), Sy(increase, increase
very slowly))/(decrease very fast, increase very slowly)
If the verbs in each of the two verb sets Vx and Vycorrespond to
dynamics with qualitatively the same property, itis possible to
construct a verb relation based on two referenceverbs, Vx0 and Vy0,
and two sets of adverbs
Ax , {x0 = e, x1, . . . , xm}, andAy , {y0 = e, y1, . . . , yn}
(24)
where e represents the adverb equivalently with theproperty
V = e V, computational verb V.Let us assume that the
correspondences between the verbs setsin (8) and the two adverb
sets in (24) are given by
Vxi = xi Vx0, i = 1, 2, . . . ,m;Vyj = yj Vy0, j = 1, 2, . . . ,
n. (25)
Based on Ax and Ay we can find two similarity functionsdefined
by
x(xi) = Sx(Vx0, xi Vx0), i = 0, 1, . . . ,m;y(yj) = Sy(Vy0, yi
Vy0), j = 0, 1, . . . , n. (26)
Without loss of generality, let us assume that
x(xi) x(x(i+1)), i = 0, 1, . . . ,m 1; (27)y(yj) y(y(j+1)), j =
0, 1, . . . , n 1. (28)
It is obvious that in natural languages, the numbers of
adverbsfor modifying the representation of a dynamical process
areusually small. Therefore, m and n should not be big numbers.Let
us assume that the verb similarity Sx(Vx0, xi Vx0)satisfies
Sx(Vx0, xi Vx0) = Sx(e Vx0, xi Vx0) , Sx(e, xi); (29)
namely, the verb similarity of two adverbs is calculated byusing
the following property
Sx(e, xi) = Sx(Vx0, xi Vx0). (30)Note that the verb similarity
of two adverbs only make sensewith respect to the reference verb;
namely, in the context ofa given dynamics. However, the expression
(30) is not only achange of representing form, but also provides a
constructivedefinition of the similarity between adverbs called
adverbsimilarity.
Adverb similarity. Given a reference verb Vx, theadverb
similarity in context Vx(adverb similarity, forshort) between two
adverbs 1 and 2, Sx(1, 2),defined by
Sx(1, 2) , Sx(1 Vx, 2 Vx). (31)This is an extension of the
results reported in [7]. Since
adverbs are transforms or operators acting upon computa-tional
verbs, adverb similarities are relations between thesetransforms or
operators. As shown in [7], adverbs can makedifferent kinds of
actions upon computational verbs. Generallyspeaking, the same
adverb can function qualitatively differentwhen different kinds of
dynamics to be modified. The follow-ing reasons contribute to the
complexity of adverb similarities.
1) When adverbs modify the parameters of dynamic sys-tems, the
bifurcation routes can be different. For exam-ple, the same adverb
can be used at different stages ofthe same bifurcation routes, yet,
the perceived effectscan be significantly different. For example,
when welook along a period-doubling bifurcation route, a period1 to
period 2 bifurcation can cause a much differentperception comparing
with a periodic to chaotic bifur-cation. On the other hand, when we
consider a fold
-
80 INTERNATIONAL JOURNAL OF COMPUTATIONAL COGNITION
(HTTP://WWW.YANGSKY.COM/YANGIJCC.HTM), VOL. 3, NO. 2, JUNE 2005
bifurcation and a Hopf bifurcation, the same adverb cancause
dramatically different perceptions.
2) Computational verbs are living in time, space and
humancognition. Therefore, adverbs can operate upon
differentaspects of computational verbs. The way to deal with
achange in parameter connected to time is different tothat in
space. Needless to say, human cognitions makethis issue much more
complex.
3) In many cases, we do not know the way adverbs actingupon
computational verbs. For example, consider thefollowing
operators.
very love, often love,unconditionally love. (32)
Since today we do not have an operational model forcomputational
verb love, no method was reported todefine the adverbs in
above.
Based on the definition of adverb similarity, the two
sim-ilarity functions in (26) can be represented in the
followingforms.
x(xi) = Sx(e, xi), i = 0, 1, . . . ,m;y(yj) = Sy(e, yi), j = 0,
1, . . . , n. (33)
The reader should bear in mind that the equivalence between(26)
and (33) is based on the fact that all elements in Axand Ay(see
Eq.(24)) should act, respectively, along two rangeswhere no
bifurcation happens. The similarity in (26) entailsthat in (33) in
the sense that (26) can only be applied to aspecified dynamics
defined by the reference verbs while (33)can be applied to any
dynamics with qualitatively similar prop-erties. From the results
in [22] we can see that the dynamics ofcontrolling a process to
asymptotically approach a referencesignal has a qualitatively
similar properties along the entirecontrol route. Therefore, in the
design of verb PID controllers,(33) can be used to reduce the
design efforts. Furthermore, thecombination of become with (33) can
provide the simplestform of the relation between the observed
dynamics of e(t)and the dynamics of control actions in a verb PID
controller.
Based on the similarity functions (33) the verb relation canbe
represented as
R =
(x,y)AxAyR(x(x), y(y))/(x, y). (34)
As an example, the verb relation in Table III can be
furthergeneralized into that shown in Table IV with the
followingsets of adverbs.
Ax = {e, fast, very fast},Ay = {e, slowly, very slowly}.
(35)
As a special kind of verb relation, verb implication
relationsare of great important in the design of verb PID
controllers. Ifthere is no bifurcation in the entire control range
of a class ofPID controllers, then there is a possibility to design
a singledesign template for the entire class. If this is the case,
thenwe need to find the way of finding the adverb similarities
forthe PID controller design.
TABLE IVA VERB RELATION FOR MODELLING THE ASSOCIATION BETWEEN
TWO
KINDS OF DYNAMICS. ONE FOR THE ERROR SIGNAL |e(t)| AND THE
OTHERFOR PROPORTIONAL GAIN Kp . THE ADVERB SIMILARITIES ARE
USED.
1/(e, e)y(slowly)/(e, slowly)y(very slowly)/(e, very
slowly)x(fast)/(fast, e)min(x(fast), y(slowly))/(fast,
slowly)min(x(fast), y(very slowly))/(fast, very slowly)x(very
fast)/(very fast, e)min(x(very fast), y(slowly))/(very fast,
slowly)min(x(very fast), y(very slowly))/(very fast, very
slowly)
After we define the verb implication relation, the verb GMPcan
be calculated based on the same method presented in [18].Let us
first consider the following example
IF |e(t)| decreases, THEN Kp increases.|e(t)| decreases fast
Kp ( increases) (36)where is to be found. The verb implication
relation, R,defined by the rule in the first line of (36) is shown
in Table IV.We can find ( increase) by using the following
verbcomposition[18]
( increase) = (decrease fast) R. (37)If the verb implication
relation is in the form as in (34) thenthe verb composition is in
the form
= fast R, (38)which is an adverb composition. In this example, R
shownin Table IV can be written in the following form
R =
(x,y)AxAyR(x(x), y(y))/(x, y)
= 1/(e, e) + y(slowly)/(e, slowly)+y(very slowly)/(e, very
slowly)+x(fast)/(fast, e)+min(x(fast), y(slowly))/(fast,
slowly)+min(x(fast), y(very slowly))/(fast, very slowly)+x(very
fast)/(very fast, e)+min(x(very fast), y(slowly))/(very fast,
slowly)+min(x(very fast), y(very slowly))/(very fast, very slowly).
(39)
Hence, we have
= fast R= x(fast)/e+min(x(fast), y(slowly))/slowly+min(x(fast),
y(very slowly))/(very slowly).
-
YANG, ARCHITECTURES OF COMPUTATIONAL VERB CONTROLLERS 81
It follows from the the experiences in (21) that has thehighest
similarity to slowly. Therefore we have
y(slowly) x(fast). (40)Similarly, we have
y(verb slowly) x(very fast). (41)To perform verb GMP in Eq. (7),
the mathematical formula
behind the verb composition are
V2 = V1 R,Sy(V2,Vy) =VxVx
Sx(V1,Vx) R(Sx(Vx0,Vx), Sy(Vy0,Vy)),
Vy Vy (42)where and denote an s-norm and a t-norm,
respectively.The result of (42) is the following similarity
function
V2 =
VyVySy(V2,Vy)/Vy. (43)
Observe that the unknown verb V2 is implicitly representedby the
verb similarities between V2 and all verbs in verb setVy . If we
choose = min, = max and R(, ) the sameas in (10) with = min then
steps to implement verb GMPare listed as follows.
1) For each Vx Vx find the verb similarity Sx(V1,Vx)and
represent V1 by using the following similarityfunction
V1 =
VxVxSx(V1,Vx)/Vx. (44)
2) It follows from (42) thatSy(V2,Vy)
= maxVxVx
min(Sx(V1,Vx), Sx(Vx0,Vx), Sy(Vy0,Vy))
= min
Sy(Vy0,Vy), maxVxVx
min[Sx(V1,Vx), Sx(Vx0,Vx)]
,
Vy VyWe first find
a = maxVxVx
min[Sx(V1,Vx), Sx(Vx0,Vx)]
as shown in the left part of Fig. 4. is called the firinglevel
of this verb rule.
3) We can find V2 by usingSy(V2,Vy) = min(Sy(Vy0,Vy), a), Vy
Vy,
as shown in the right part of Fig. 4.On the other hand, we can
also perform verb GMP in
Eq. (7) by using adverb composition. Let 1x (xi) denotethe
adverb similarity between 1 and xi, i = 0, 1, . . . ,m,and 2y (yj),
j = 0, 1, . . . , n, denote the adverb similaritybetween 2 and yj
then the mathematical formula for thispurpose are
2 = 1 R,2y (y) =
xAx
1x (x) R(x(x), y(y)),
y Ay (45)
where 1 and 2 are two adverbs corresponding to computa-tional
verbs V1 and V2. The way to calculate (45) is the sameas that for
calculating verb composition.
Let us study the following verb generalized modus
tollens(GMP)[18]
IF |e(t)| decreases, THEN Kp increases.Kp increases slowly
|e(t)| ( decreases). (46)The unknown adverb can be found by
using the followingadverb composition
= R slowly= y(slowly)/e
+min(x(fast), y(slowly))/fast+min(x(very fast), y(slowly))/(very
fast).
It follows from the experiences in (21) that has the
highestsimilarity to fast. Therefore we have
x(fast) y(slowly). (47)Similarly, we have
x(very fast) y(verb slowly). (48)It follows from Eqs. (40),
(41), (47) and (48) that
x(fast) = y(slowly) , (2),x(very fast) = y(verb slowly) , (3),
(49)
where (2) and (3) are the degrees of similarity between Rule1
and 2 of (21), and Rule 1 and Rule 3 of (21), respectively.Equation
(49) shows that the difference between two verbrules for the same
dynamics is the same as those for bothantecedences and
consequences. It follows from (23) that
1 > (2) > (3).
Therefore, the verb relation in Table IV can be simplified
asthat listed in Table V. Observe that the reference verb rule
forthe verb relation in Table V is the first rule in (21), the
othertwo rules are only auxiliary rules for constructing the
verbrelation. Therefore, Table V is only useful when the verb GMPor
verb GMT are performed with respect to Rule 1 in (21).If the verb
GMP or verb GMT are needed to be performedwith respect to other
rule, say, Rule 2 in (21), then the verbimplication relation shall
be revised by using Rule 2 as thereference rule. One example of the
resulting verb relation isshown in Table VI.Remarks. Therefore, in
real applications we usually have a setof known verbs for the
dynamics, then the verb similarities(oradverb similarities) are
constructed for the verbs in both theantecedent and the consequence
of rule. The verb implicationrelation of this verb rule is then
constructed based on verbsimilarities already known. The method of
constructing verbimplication relations is only used to demonstrate
the mech-anism of constructing verb implication relation based on
thequalitative properties of dynamics.
-
82 INTERNATIONAL JOURNAL OF COMPUTATIONAL COGNITION
(HTTP://WWW.YANGSKY.COM/YANGIJCC.HTM), VOL. 3, NO. 2, JUNE 2005
VVy
Verb similarity
0
1 1
0VVx
Vx0V1
Vy0
V2
Verb similarity
Fig. 4. Illustration of the procedure of verb inference using
verb GMP. The horizontal axis representing verb sets Vx and Vy .
The vertical axis denotes thedegree of verb similarity. The outline
of the shadowed region in the right-hand side figure representing
the similarity function of V2.
TABLE VA VERB RELATION FOR MODELLING THE ASSOCIATION BETWEEN
TWO
KINDS OF DYNAMICS. ONE FOR THE ERROR SIGNAL |e(t)| AND THEOTHER
FOR PROPORTIONAL GAIN Kp . THE ADVERB SIMILARITIES ARE
USED UNDER CONDITIONS SHOWN IN (49).
1/(e, e) (2)/(e, slowly) (3)/(e, v slowly)
(2)/(fast, e) (2)/(fast, slowly) (3)/(fast, v slowly)
(3)/(v fast, e) (3)/(v fast, slowly) (3)/(v fast, v slowly)
[v =very, 1 > (2) > (3).]
TABLE VIREVISION OF TABLE V WITH RULE 2 IN (21) AS THE REFERENCE
RULE.
(2)/(e, e) (2)/(e, slowly) (2)/(e, v slowly)
(2)/(fast, e) 1/(fast, slowly) (2)/(fast, v slowly)
(2)/(v fast, e) (2)/(v fast, slowly) (2)/(v fast, v slowly)
[v =very, 1 > (2).]
D. Verb Inference with Verb AlgorithmA verb algorithm consists
of a set of verb IF/THEN rules
which are defined over the same product space and areconnected
by the connective ELSE. Corresponding to differentverb relation
operator Rs, the ELSE can be interpreted asAND if R(0, ) = 1 or OR
if R(0, ) = 0. To generatecontrol signals we usually consider the
following GMP basedon a verb algorithm
IF NP1 V(1)x , THEN NP2 V(1)y ELSEIF NP1 V(2)x , THEN NP2 V(2)y
ELSE.
.
.
IF NP1 V(l)x , THEN NP2 V(l)y .NP1 V1
NP2 V2 (50)If we choose the verb relation operator (10),
then
V2 =l
i=1
V1 Ri
where Ri is the verb implication relation of the ith verb
rule.One example for a verb algorithm with 3 rules are shownin Fig.
5. Observe that the final result of the verb GMP is
a verb similarity function. In many applications, we need
toreconstruct dynamics from verb similarity functions.
E. Reconstruct Computational Verbs from Similarity Func-tions:
Deverbification
Although verb inference based on verb similarity is onlyone of
many ways to perform a verb inference3, this methodis very
efficient when the underlying dynamics change theirqualitative
behaviors continuously with respect to parameterchanges. Since in
this method all verbs are represented bytheir verb similarity
functions, the resulting verbs are alsorepresented by verb
similarity functions. However, in manyapplications such as verb
controllers, verb similarity functionscan not be directly used as a
result to generate control signal.Instead, we need to transfer a
verb similarity function ina computational verb. This process is
called deverbification.Since a verb similarity function is defined
on a verb set whereeach verb should be quantitatively different to
each other, thereshould be only one point at which the verb
similarity takes thevalue 1. Therefore, whenever we find a 1 in the
similarityfunction, say, y (y) = 1, then = y . We only needto
consider the cases when every value in a verb similarityfunction is
less than 1. Since the constructing method of verbsimilarity
functions, the center of area(COA) and center ofsums(COS) methods
are not suitable for constructing verbsfrom verb similarity
functions. Instead, we use mean ofmaxima(MOM) method. Assume that
there are K maximasimilarity values in an adverb set, then the
output adverb isgiven by
V0 =Kp=1
p VpK
(51)
where V0 is the reference verb, the arithmetic operations tothe
computational verbs are defined as the same as those forverb
numbers[16]. This method of constructing verbs requirethat all verb
similarity functions must be convex. However,it is not necessary to
require all verb similarity functions tobe normal; namely, have
maxima at 1. In many occasions,the verb rules are generated based
on mental experiments ofhuman experts. Therefore, the rule set
might only get the
3For example, in [18] verb inferences were based on collapses of
compu-tational verbs.
-
YANG, ARCHITECTURES OF COMPUTATIONAL VERB CONTROLLERS 83
VVy
Verb similarity
0
1 1
0VVx
Vx0V1
Verb similarity
Vy0
Verb similarity1
Verb similarity
0
1
0VVx
Vx1 V1 Vy1
VVyVerb similarity
1Verb similarity
0
1
0VVx
Vx2
V1 Vy2
VVy
V2
Verb similarity1
0 VVy
Rule 1
Rule 2
Rule 3
Union of all rules
Fig. 5. Illustration of the procedure of verb GMP based on a
3-rule verb algorithm. The horizontal axis representing verb sets
Vx and Vy . The vertical axisdenotes the degree of verb similarity.
The outline of the shadowed regions of the last picture denotes the
verb similarity function of V2.
most relevant qualitative outlines of the underlying
dynamicmechanism, the details(quantitative characteristics) might
bevery different from what the rule set tells. This results inp, p
= 1, . . . ,K, in (51) having very small values. To copewith this
case, in practical applications we usually generalize(51) into the
following form
V0 = Kp=1
p Vp (52)
where is a weighting adverb for the result of the entirerule
set.
F. Remarks
A verb implication relation is a set of dynamical knowledgein
the form of natural language statements. For differentdynamic
processes the patterns to generate adverbs by verbimplication
relations might be in very different forms. For-tunately, natural
languages show us that our dynamic experi-ences can be lumped into
finite numbers of clusters of whicheach can be described by a verb
implication relation. Since inmany cases verb implication relations
are closely related to theparameter spaces of dynamic systems, they
are closely relatedto the bifurcation of dynamic systems. One
should use thefollowing constraints to find a valid/efficient verb
implicationrelation.
-
84 INTERNATIONAL JOURNAL OF COMPUTATIONAL COGNITION
(HTTP://WWW.YANGSKY.COM/YANGIJCC.HTM), VOL. 3, NO. 2, JUNE 2005
1) A verb implication relation should cover a continuumwhere the
dynamical behaviors are qualitatively similar;namely, no
bifurcation should happen in the scope ofthis verb implication
relation.
2) A set of verb implications should be used to coverall
segments along a bifurcation route to ensure thecomplete coverage
of all dynamic behaviors of thesystem.
3) To find verb algorithms from a dynamical system, thefirst
step is to chunk the dynamics into representativecomputational
verbs; namely, to find Vx and Vy. Onealternative method is to find
a reference verb for eachverb set and find the sets of adverbs.
Then we needto find the verb similarity function for each verb
setor adverb set. Two key issues should be taken care ofin real
applications. The first one is the choice of theverb similarity,
which determines the distance betweenverbs in the same verb set.
The second one is the designof adverbs, which simplifies the
calculation and designprocess in many applications.
IV. DESIGN VERB PID CONTROLLERS BY GENERALIZINGFUZZY GAIN
SCHEDULERS
A. Fuzzy Gain SchedulersWithout loss of generality, let us
assume that the gains
Kp(k) and Kd(k) can be only scheduled within interval[Kp,Kp] and
[Kd,Kd], respectively. While in a fuzzy gainscheduler the PID
parameters are determined by the currentvalue of e(k) and e(k), in
a verb gain scheduler thePID parameters are determined by the
historical values andthe current value of e(i), i = 0, 1, 2, , k.
The differencebetween fuzzy and verb gain schedulers is the way to
tune theparameters of the controller.
The ranges of Kp and Kd are chosen based on the resultspresented
in [24] as follows:
Kp = 0.32Ku,Kp = 0.6Ku,
Kd = 0.08KuTu,Kd = 0.15KuTu, (53)where Ku and Tu are the gain
and the period of oscillation atthe stability limit under
P-control[25].4 To avoid clutters wenormalized Kp and Kd within the
interval [0, 1] by
Kp =Kp KpKp Kp
, Kd =Kd KdKd Kd
. (54)
And we define the value of Ki indirectly by a parameter through
the following relation[24]:
Ki =K2pKd
. (55)
Since a verb PID controller can be readily generated from afuzzy
PID controller, it is useful to review briefly the designing
4In [25] Ku was represented as Su which was called ultimate
sensitivityabove which the output of the plant will oscillate with
big enough amplitude,and below which the output of the plant will
settle at a given value. In manycase, this is the Hopf bifurcation
point[3] with respect to the bifurcationparameter Ku. In many
applications, the verb PID controllers will be appliedwithout
knowing the underlying models of the controlled plant. Therefore,Ku
and Tu are usually found by running the P-controller.
process of the fuzzy PID controller given in [24]. The fuzzygain
scheduler tunes the three parameters Kp, Kd and byusing the a set
of m fuzzy rules each in the following form
IF e(k) is Ai AND e(k) is Bi,THEN Kp is Ci, Kd is Di and = i,i =
1, 2, ,m. (56)
where i is a constant, Ai and Bi are fuzzy numbers
whosemembership functions are given in Fig. 6, Ci and Di are
fuzzysets whose membership functions can choose only two valuesbig
or small shown in Fig. 7. The membership functionsin Fig. 7 are
given as follows.
big(x) = min(1,1
4ln(1 x)
),
small(x) = min(1,1
4lnx
), x (0, 1). (57)
All basic building blocks for fuzzy PID controller are now
inplace, we are now ready to generalize fuzzy control rules
intoverb control rules.
(x)
NB NM NS ZO PS PM PB
x0
1
Fig. 6. The membership functions of fuzzy numbers modelling Ai
and Bi.In this figure, N and P represent negative and positive,
respectively.S, M and B represent small, medium, and big,
respectively. ZO representnear zero. NB, NM and NS are
negative-big, negative-medium,and negative-small, respectively.
Similarly, PB, PM and PS arepositive-big, positive-medium, and
positive-small, respec-tively.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
x
(x)
small big
Fig. 7. The membership functions of fuzzy sets small and big
formodelling fKp and fKd.
-
YANG, ARCHITECTURES OF COMPUTATIONAL VERB CONTROLLERS 85
B. Generalize Fuzzy Control Rules into Verb Control
RulesConsider the following fuzzy rules for turning PID
controller[24]:IF e(k) is PB AND e(k) is ZO,THEN Kp is big, Kd
is small, and = 2. (58)
This fuzzy rule is backed by an experience of control
engi-neers. In Fig. 8 a typical time response of the plant is
shown.The control rule (58) is used to handle the situation in
theregion 1 shown in Fig. 8 where a big control signal is neededin
order to deduce e(k) quickly. In this case, the PID controllerneeds
to have a large Kp, a large Ki and a small Kd in orderto produce a
large control signal. To make Ki bigger we needto choose a smaller
. To translate the fuzzy rule in (58) intoa verb rule it is easier
to study the phase plot shown in Fig. 9.As clearly shown in the
phase plot and the step response inFig. 8, the plant only stays in
the region 1 for a very shorttime interval before it enters the
region 2 as shown in thephase plot. In [24] the fuzzy control rule
for region 2 is givenby
IF e(k) is PB AND e(k) is NS,THEN Kp is big, Kd is small, and =
2. (59)
Therefore the actions in both fuzzy rules (58) and (59) are
thesame. It is readily to use the following verb rule to
implementboth fuzzy rules as
IF e(k) decreases from PB,THEN Kp is big, Kd is small, and = 2.
(60)
It already show the advantage of using verb rules over
fuzzyrules because we can combine two fuzzy rules into a singleverb
rule. This is helpful to overcome the rule explosion offuzzy PID
controllers. However, the drawbacks of verb rule(60) is that the
consequence is still not verbified. In order toverbify the
consequence, we need to construct verb rules basedon the global
structure of fuzzy rule space.
It follows from Tables I, II and III in [24] that the fuzzyrule
space of the fuzzy PID controller can be constructedand shown in
Fig. 10. Observe that the fuzzy rule spaceworks only locally
without considering the global behaviorsof the trajectories of the
control error e(k). For example,the following simple fact that the
trajectories always movealong clockwise direction is a global
observation and can bereadily implemented by verb rules. However,
fuzzy rules cannot reflect this global observation because their
lack of bigvision. Our target is to translate the fuzzy rule spaces
inFig. 10 into three sets of verb rules.
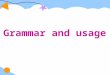
1) Constructing Verb Rules for Tuning Kp from PhasePlots: When
human experts look at Fig. 10(a), speciallywhen our eyes trace the
two spiral trajectories, many dynamicpatterns can occur. The design
of computational verb rulesis to balance the details of these
dynamic patterns and theglobal picture of the trajectories go
though the phase plot.In order to make the analysis and design
procedure clear,let us redraw Fig. 10(a) in a continuous fashion
shown inFig. 11. Observe that in Fig. 11 the boundaries between
the
t
r
y
0Region 1
Region 2
Fig. 8. The step response of the plant. This is a typical time
response forindustrial control systems. The solid curve denotes a
control process withpositive initial control error while the dashed
curve denotes a control processwith negative initial control
error.
e(t)
e(t)
M
B
S ZO
Region 1
Region 2
Fig. 9. The phase plot of the step response of the plant. Verb
control rulesare easier to design based on the phase plot. The
solid and dashed curvescorrespond to those shown in Fig. 8.
big and small values of Kp are redrawn in a qualitativeway based
on Fig. 10(a) while many details are deleted toavoid confusing. The
significant difference between Figs. 10(a)and 11 is that instead of
chunking the phase plane; namely,the (e,e)-plane, by using fuzzy
rules, we use verb rules tochunk the trajectories; namely, the
spiral curves. Since bothfuzzy rules and verb rules describe the
qualitative behaviorsof the process/plant, the accurate boundaries
between chunksare of minor importance.
In Fig. 11, all chunks along the trajectories are marked
bylabels in the form of C0, C1, . . .. The chunk C0 correspondsto
the following verb rule
C0. IF |e(k)| is leaving big, THEN Kp decreasesslowly from big.
(61)
Since this is the very first verb rule generated from the
phaseplot based on static fuzzy knowledge, it is worthwhile to
show
-
86 INTERNATIONAL JOURNAL OF COMPUTATIONAL COGNITION
(HTTP://WWW.YANGSKY.COM/YANGIJCC.HTM), VOL. 3, NO. 2, JUNE 2005
e(t)
e(t)
M
B
SZO
S
M
B
ZOM S MS BB
B
B
B
S S S B
B
B
B
SS
B S S BS
BBB S B
BB BBB B
BB BBB S B
BBB S S BS
B S S S BSS
e(t)
e(t)
M
B
SZO
S
M
B
ZOM S MS BB
S
S
S
B B B S
S
S
BB
S B B SB
SSS B S
S B B B SBB
S B B B SBB
S B B B SBB
SSS B B SB
(a) (b)
e(t)
e(t)
M
B
SZO
S
M
B
ZOM S MS BB
2
2
2
3 4 5 2
2
2
34
2 3 3 23
222 3 2
2 3 3 4 233
2 3 3 4 233
2 3 4 5 234
222 3 3 23
(c)Fig. 10. Fuzzy rule space of fuzzy PID controller presented
together with phase space. (a) Configuration of the rule set for
fKp. (b) Configuration of therule set for fKd. (c) Configuration of
the rule set for .
C0e(t)
e(t)
M
B
SZO
S
M
B
ZOM S MS BB
C2
C3C4
C6
C5
C7 C8
C9C10
C11C12
C1
Fig. 11. Chunks of trajectories in phase space for designing
computationalverb P-controller.
the detailed design experiences behind it. Comparing theposition
of chunk C0 in Fig. 11 with the fuzzy chunks inFig. 10(a), the
chunk C0 touches the governing regions of the
following three fuzzy rules
IF e(k) is PB AND e(k) is ZO, THEN Kp is big;IF e(k) is PB AND
e(k) is NS, THEN Kp is big;IF e(k) is PB AND e(k) is NM, THEN Kp is
big.
(62)Take a look at Eq. (62), what do you see? Three isolated
rules!The connection between them, as shown by the trajectoriesin
the phase plot, is missing in these fuzzy rules. This isbecause
this connection is generated by dynamics which cannot be properly
dealt with noun phrases; namely, fuzzy theory.However, just imagine
that we are travelling along the spiraltrajectory on the phase-plot
plane, we know we are leavingthe region where |e(k)| is big and
will arrive at the regionwhere |e(k)| is medium in the near future.
We will not stayin the |e(k)| being big region for too long,
therefore, we donot say that we stay in the |e(k)| being big region
thoughthe entire chunk C0 is in the |e(k)| being big region.
Let us then take a look at what will happen to Kp whenwe take a
walk along the spiral trajectory in chunk C0. Therules in (62) only
tell us that Kp will be big for all the time.This is correct if we
only look at a small region around us.However, suppose we take a
look at the global tendency in the
-
YANG, ARCHITECTURES OF COMPUTATIONAL VERB CONTROLLERS 87
phase-plot plane, we find the spiral trajectory will
eventuallycross the boundary between Kp being big and Kp beingsmall
regions. If we assume that Kp changes continuouslyon the phase-plot
plane, we will not buy the theory thatKp changes between big and
small impulsively along aboundary. Instead, it feels more natural
to imagine smoothchanges from big to small along the chunks C0, C2
andC3. Hence, we know when we walk along the chunk C0, Kpwill
decrease. The entire chunk C0 is in the big region andit will take
a relatively long time to walk from the start to theend of the
chunk C0 because e(k) is less than medium atmost of time, therefore
we know Kp must decrease slowly.
The chunk C2 corresponds to the following verb rule
C2. IF |e(k)| decreases from big to medium,THEN Kp decreases
fast from big. (63)
The difference between the chunks C0 and C2 is that the entireC0
is in the |e(k)| being big region while C2 crosses from the|e(k)|
being big region into the |e(k)| being medium region.The other
difference is that in the chunk C2 the speed e(k)becomes bigger
than that in the the chunk C0. Therefore, thedecrease of Kp is no
longer slow.
The chunk C3 corresponds to the following verb rule
C3. IF |e(k)| decreases from medium to small,THEN Kp decreases
from big to small. (64)
C3 is the first chunk to cross the boundary between Kp beingbig
and being small.
The chunks C0 to C7 cover the spiral trajectory in half ofits
period when it begins at big error. The chunks C8 to C12cover the
spiral trajectory in half of its period when it beginsat medium
error. Note that we can also define a series ofsuch chunks for the
case when the spiral trajectory begins atvery big error.
Fortunately, in many cases we do not needto chunk the dynamics in
such great details because of thefollowing reasons.
1) The chunks C0 to C7 already covers the governingranges of the
detailed chunks. For example, chunks C8and C9 are covered by chunks
C2 and C3. C4 coversC10, C5 and C6 covers C11 and C12.
2) The calculation of verb rules can tolerate enormousamount
noise and variations.
From the experience of designing verb P-controllers[22], weknow
that the rules corresponding to chunks C0 to C7 aresufficient to
design the gain scheduler for the P-component.Furthermore, the
chunk C0 can be readily covered by chunkC1. Therefore, for
designing verb PID controllers, we onlyneed to implement rules
governing chunks C1 to C7. All verbrules corresponding to chunks C1
to C7 are listed in Table VII.The canonical forms in become of all
rules in Table VII arelisted in Table VIII.
2) Constructing Verb Rules for Tuning Kd from PhasePlots:
Observe that we can get the configuration in Fig. 10(b)by rotating
that in Fig. 10(a) 90-degree clockwise. Therefore,it is not
necessary to construct verb rules from scratch.Instead, we can take
advantage of the relation between both
configurations in Fig. 10(a) and 10(b) for the purpose
ofconstructing verb rule set for Kd. The verb rule set for tuningKd
is simply a revision of the rule set in Tables VII andVIII. The
resulting verb rule set for the D-controller is shownin Tables IX
and X. Comparing the results in Tables VIIIand X one can observe
that for the chunks C2 to C7 thecorresponding verb rules can be
arrived from their counterpartsby exchanging the order of state 1
and state 2 in theirconsequences. The verb rule corresponding to
the chunk C1is unchanged.
3) Constructing Verb Rules for Tuning from Phase Plots:Comparing
the configurations in Fig. 10(b) and 10(c) one canobserve that both
configurations are similar if we treat the values that are bigger
than 5 as big and less than 2 as small.Here we choose the same
membership functions for Kp andKd shown in Fig. 7 to fuzzify ,
which is given by
= (65)
where = 2 and = 5 are chosen. By doing so, the rulesets for Kd
and are in the same form. Therefore, we cansimply modify the rule
set for Kd into that for as listed inTables XI and XII.Remark. At
the first sight of Fig. 10, one might feel it will bebored to
design three sets of verb rules individually. However,from the
procedure in above, one can see that two sets ofverb rules can be
easily derived from the first one. Therefore,we only need to
program one rule set and then change theparameters to arrive at the
rest two.
C. Implementing Verb P-controllersLet us proceed to implement
the seven rules listed in
Table VIII, in other words, to implement a verb P-controller.The
method will be used here is different from that used in[22]. The
reason that we implement the rules in Table VIIIinstead of those in
Table VII is that the rules in Table VIII arein more generic form
and many design methods can be reusedwhile the rules in Table VII
are only valid for the design of theP-controllers. Therefore, the
design methods used in designingTable VII may not easy to be reused
in other cases such asthe design of the D-component and the
I-component.
1) Choosing Verb/Adverb Sets: The first thing to implementthe
rule sets in Table VIII is to select verb sets Vx and Vy ,or adverb
sets Ax and Ay to cover the entire universe ofdynamics5 that we are
interested. In the case of the verb P-controller, the universes of
dynamics are the dynamics of thecontrol error e(t) and the
normalized proportional gain Kp(t).
Since the dynamics of |e(t)| is chunked into four fuzzyvalues
big, medium, small and zero, it follows the spiraltrajectories
shown in Fig. 11 that the dynamics of |e(t)| canbe chunked into the
following computational verbs.
5The universe of dynamics of a control system is roughly
equivalent to allperceptible dynamics for the control system.
Therefore, from the qualitativetheory of dynamical systems, the
universe of dynamics is a continuum forcontinuous dynamical
systems. However, just like in fuzzy controller design,with finite
number of fuzzy sets/numbers we can cover the entire universeof
discourse, in verb controller design, we can cover the entire
universe ofdynamics by using finite numbers of verbs and
adverbs.
-
88 INTERNATIONAL JOURNAL OF COMPUTATIONAL COGNITION
(HTTP://WWW.YANGSKY.COM/YANGIJCC.HTM), VOL. 3, NO. 2, JUNE 2005
TABLE VIITHE VERB RULES FOR THE CHUNKS C1 TO C7 IN FIG. 11 FOR
DESIGNING VERB P-CONTROLLER.
Chunk/Rule Statements of the verb rulesC1 IF |e(k)| stays zero,
THEN fKp increases to big;C2 IF |e(k)| decreases from big to
medium, THEN fKp decreases fast from big;C3 IF |e(k)| decreases
from medium to small, THEN fKp decreases from big to small;C4 IF
|e(k)| decreases from small to zero, THEN fKp decreases slowly to
small;C5 IF |e(k)| increases from zero to small, THEN fKp increases
slowly from small;C6 IF |e(k)| increases from small to medium, THEN
fKp increases from small to big;C7 IF |e(k)| increases from medium,
THEN fKp increases fast to big.
TABLE VIIITHE CANONICAL FORMS IN become OF ALL RULES IN TABLE
VII.
Chunk/Rule Statements of verb rules in canonical forms in
becomeC1 IF |e(k)| become(zero, zero), THEN fKp become(small,
big);C2 IF |e(k)| become(big, medium), THEN fKp fast become(big,
small);C3 IF |e(k)| become(medium, small), THEN fKp become(big,
small);C4 IF |e(k)| become(small, zero), THEN fKp slowly
become(big, small);C5 IF |e(k)| become(zero, small), THEN fKp
slowly become(small, big);C6 IF |e(k)| become(small, medium), THEN
fKp become(small, big);C7 IF |e(k)| become(medium, big), THEN fKp
fast become(small, big).
TABLE IXTHE VERB RULES FOR THE CHUNKS C1 TO C7 IN FIG. 11 FOR
DESIGNING VERB D-CONTROLLER.
Chunk/Rule Statements of the verb rulesC1 IF |e(k)| stays zero,
THEN fKd increases to big;C2 IF |e(k)| decreases from big to
medium, THEN fKd increases fast from small;C3 IF |e(k)| decreases
from medium to small, THEN fKd increases from small to big;C4 IF
|e(k)| decreases from small to zero, THEN fKd increases slowly to
big;C5 IF |e(k)| increases from zero to small, THEN fKd decreases
slowly from big;C6 IF |e(k)| increases from small to medium, THEN
fKd decreases from big to small;C7 IF |e(k)| increases from medium,
THEN fKd decreases fast to small.
TABLE XTHE CANONICAL FORMS IN become OF ALL RULES IN TABLE
IX.
Chunk/Rule Statements of verb rules in canonical forms in
becomeC1 IF |e(k)| become(zero, zero), THEN fKd become(small,
big);C2 IF |e(k)| become(big, medium), THEN fKd fast become(small,
big);C3 IF |e(k)| become(medium, small), THEN fKd become(small,
big);C4 IF |e(k)| become(small, zero), THEN fKd slowly
become(small,big);C5 IF |e(k)| become(zero, small), THEN fKd slowly
become(big, small);C6 IF |e(k)| become(small, medium), THEN fKd
become(big, small);C7 IF |e(k)| become(medium, big), THEN fKd fast
become(big, small).
Labels Computational verbs for the dynamics of |e(t)|Ve1
become(big, medium),Ve2 become(medium, small),Ve3 become(small,
zero),Ve4 become(zero, small),Ve5 become(small, medium),Ve6
become(medium, big).Ve7 become(zero, zero).
Remark. Sometimes we might need to use bigger if weonly chunk
the upper limit of quantities into big. Notethat bigger is
different from very big. The reasonthat we sometimes do not use
very big is that we onlyknow something bigger than big and yet we
do not knowto what degree it is bigger than big. The same thing
can
be said concerning the relation between very small andsmaller.
Observe that become(zero, zero) is the canonicalform of stay zero.
However, stay zero is not the same asbe zero because stay zero may
have a past not to be zero.
On the other hand, since the dynamics of Kp(t) is chunkedinto
two values small and big, the dynamics of Kp(t) canbe chunked into
the following computational verbs.
Labels Computational verbs for the dynamics of Kp(t)Vp1
become(big, small),Vp2 become(small, big).
Therefore, the most important issues of implementing
com-putational verbs used in these rules are the implementationsof
computational verb become.
-
YANG, ARCHITECTURES OF COMPUTATIONAL VERB CONTROLLERS 89
TABLE XITHE VERB RULES FOR THE CHUNKS C1 TO C7 IN FIG. 11 FOR
DESIGNING VERB I-CONTROLLER.
Chunk/Rule Statements of the verb rulesC1 IF |e(k)| stays zero,
THEN e increases to big;C2 IF |e(k)| decreases from big to medium,
THEN e increases fast from small;C3 IF |e(k)| decreases from medium
to small, THEN e increases from small to big;C4 IF |e(k)| decreases
from small to zero, THEN e increases slowly to big;C5 IF |e(k)|
increases from zero to small, THEN e decreases slowly from big;C6
IF |e(k)| increases from small to medium, THEN e decreases from big
to small;C7 IF |e(k)| increases from medium, THEN e decreases fast
to small.
TABLE XIITHE CANONICAL FORMS IN become OF ALL RULES IN TABLE
IX.
Chunk/Rule Statements of verb rules in canonical forms in
becomeC1 IF |e(k)| become(zero, zero), THEN e become(small, big);C2
IF |e(k)| become(big, medium), THEN e fast become(small, big);C3 IF
|e(k)| become(medium, small), THEN e become(small, big);C4 IF
|e(k)| become(small, zero), THEN e slowly become(small,big);C5 IF
|e(k)| become(zero, small), THEN e slowly become(big, small);C6 IF
|e(k)| become(small, medium), THEN e become(big, small);C7 IF
|e(k)| become(medium, big), THEN e fast become(big, small).
2) Implementing Become(state 1, state 2): As thecanonical form
of all verbs used in verb rules, be-come(state 1, state 2) should
be constructed based onthe features of the dynamics of the control
system. In thedesign of PID controllers, state 1 and state 2 are
twoBEINGs.6 Let us assume that the dynamics of become(state1, state
2) has an outer representation(measurement) x(t),which can be
either |e(t)| or Kp(t). As the method pre-sented in [22], the
evolving function of become(state1, state 2) can be defined based
on two waveforms ofmembership state 1(x(t)) and state 2(x(t)). By
doing thiswe can contain the range of Ebecome on [0, 1] and
thereforeavoid the trouble of coping with the amplitudes of
individualwaveforms from time to time. Let us assume that the life
spanof the computational verb is Tw, then the evolving function
ofbecome(state 1, state 2) can be defined as
Ebecome(state 1,state 2)(t)={
state 1(x(t)), t [0, Tw2
],
state 2(x(t)), t [Tw2 , Tw
].
(66)
This evolving function must satisfy the following
boundaryconditions in order to be perceptually correct:
1) state 1(x(0)) state 1(x(Tw2 ));2) state 2(x(Tw2 )) state
2(x(Tw));3) state 1(x(0)) 1 and state 2(x(Tw)) 1.
Observe that the values of state 1(x(Tw2 )) andstate 2(x(Tw2 ))
are not necessarily to be the same thoughwe usually choose them to
be the same to reflect somecontinuity of the transient between
state 1 andstate 2. The following standard evolving functions
areusually used to implement becomes.
1) Linear cases. If we only know the following parameters:Tw,
state 1
(x(Tw2 )
)= a, and state 2
(x(Tw2 )
)= b,
6A detailed discussion on the relation between BEINGs and
BECOMINGscan be found in [13]. Also, the one-to-one mappings of
BEINGs to nouns andBECOMINGs to verbs were studied there.
then the evolving function is given by
Ebecome(state 1,state 2)(t)
=
{1Tw
(Tw 2t+ 2ta) , t [0, Tw2
],
1Tw
(2t Tw + 2(Tw t)b) , t [Tw2 , Tw
].
(67)2) Quadratic cases. If we know the following parameters:
Tw, state 1(x(Tw4 )
)= a, state 1
(x(Tw2 )
)= b,
state 2(x(Tw2 )
)= c, and state 2
(x( 3Tw4 )
)= d then
the evolving function is given by
Ebecome(state 1,state 2)(t)
=
8(12a+b)t22Tw(34a+b)t+T 2w
T 2w,
t [0, Tw2 ] ,8(c2d+1)t22Tw(7c12d+5)t+(6c8d+3)T 2w
T 2w,
t [Tw2 , Tw] .(68)
3) Exponential cases. If we only know the follow-ing parameters:
Tw, state 1
(x(Tw2 )
)= a, and
state 2(x(Tw2 )
)= b, then the evolving function is
given by
Ebecome(state 1,state 2)(t)
=
exp(2 ln aTw
t), t [0, Tw2 ] ,
exp( 2 ln bTw (t Tw)
), t [Tw2 , Tw] .
(69)Remarks. Other evolving systems of becomes can be usedfor
different applications. However, if in applications thelife span Tw
is not big, we use simple evolving func-tions. The factors
contribute to the choices of the shapesof Ebecome(state 1,state 2)
are the dynamics of x(t) and themembership functions state 1 and
state 2. The interactionsbetween them are very complex and need
extensive studies in
-
90 INTERNATIONAL JOURNAL OF COMPUTATIONAL COGNITION
(HTTP://WWW.YANGSKY.COM/YANGIJCC.HTM), VOL. 3, NO. 2, JUNE 2005
the future. To show a typical method of determine the shape
ofEbecome(state 1,state 2) let us consider the following
example.
Let us assume that state 1 = near one and state 2 =near zero and
assume that
near one(x) = x, near zero(x) = 1 x, x [0, 1]. (70)Let the life
span be Tw and the dynamics be givenby x(t) = et, then the evolving
function forbecome(near one, near zero) is given by
Ebecome(near one,near zweo)(t)={
et, t [0, Tw2 ] ,1 et, t [Tw2 , Tw] . (71)
Note that even for this simple case the evolving function
ofbecome can be relatively complicated. Needless to say, inmany
applications we might have no clue about the under-lying dynamics.
Therefore, just as the choice of membershipfunctions in fuzzy
theory and the choice of probability densityfunctions in
statistics, we sometimes choose evolving func-tions without
considering every details of the real thing.However, along the
evolving process of computational verbtheory and physical
linguistics, we will gain more and moreinsights into this critical
issue. This is not only because ourcuriosity but also the need of
formalizing natural languagesinto the framework of natural
sciences.
3) Calculating Verb Similarities: Let the life span of
be-come(state 1, state 2) be Tw, and an observed wave-form x(t) be
recorded, we can construct the evolving functionof a default
observing verb observed based on x(t) by
Eobserved() = state 1(x()),
[t Tw, t Tw2
],
state 2(x()), [t Tw2 , t
],
undefined, otherwise,(72)
where t denotes the current moment. Observe that the lifetime
for the observing verb observed is in the past. Also,the
construction of the evolving system of the computationalverb
observed needs to take advantage of both the nouncenter and the
verb center of physical linguistics[18]. If wewant to know the verb
similarity between observed andbecome(state 1, state 2), we need to
set the birthtime of become(state 1, state 2) at the time moment(t
Tw). In continuous time the most commonly used verbsimilarities can
be calculated by using the following steps.
1) The first half window.
a1 , Tw
2
0
Ebecome() Eobserved(t Tw + )d,
b1 , Tw
2
0
Ebecome() Eobserved(t Tw + )d.(73)
2) The second half window.
a2 , TwTw2
Ebecome() Eobserved(t Tw + )d,
b2 , TwTw2
Ebecome() Eobserved(t Tw + )d.(74)
3) The balance factor $.
$ = 2min(
a1b1 + b2
,a2
b1 + b2
). (75)
4) The entire window.S(become, observed) =
a1 + a2b1 + b2
$. (76)
Remarks. One might think that to calculateS(become, observed) by
using the following formula ismuch more straightforward.
S(become, observed)
=
Tw0
Ebecome() Eobserved(t Tw + )d Tw0
Ebecome() Eobserved(t Tw + )d. (77)
However, the equation in above fails to work in many oc-casions
because it does not take care of the fact that eitherthe evolving
function of become or observed consists oftwo halves generated by
different mechanisms; namely, byusing different computational
nouns. For example, if state1 is big and the first half of
observed, which is generatedby big(x(t)) = 1 for all t [0, Tw2 ],
then both a1 and b1can be very closed to their maximum value Tw2 .
If this is thecase, independent of the value of a2 and b2, the
value givenby (77) should be around 0.5. This example shows that
theformula (77) can not distinguish well become(big, bigger)from
become(big, small) and become(big, smaller). Theutility of balance
factor $ can efficiently prevent this fromhappening.
For discrete time the verb similarity can be calculated byusing
samples of both evolving functions. In the examplespresented later,
the reader shall understand the procedure ofcalculating verb
similarity from discrete time series. Observethat we can calculate
the verb similarities at every point of ameasured time series x(t)
by using the evolving function ofbecome as a moving template over a
window of fixed lengthTw. This is the basic technique that we will
use to control asystem along time.
D. Implementing P-controller for a Second-order Plant:
Ex-ample
Let us choose the following plant as an example to illustratethe
design process of a verb P-controller. A verb P-controllerfor this
plant was previously designed in [22]. Consider thefollowing
second-order control system
x1(t) = x2(t),x2(t) = 2x2(t) x1(t) + u(t Ts),y(t) = x1(t),e(t) =
r y(t) (78)
where xi(t), i = 1, 2 are two states, y(t) is the output, u(t)is
the input control signal, r is the reference and Ts is thesampling
period. Observe that the control is delayed. The delayof control
signal is caused by the time period that we need tocalculate the
control signal.
-
YANG, ARCHITECTURES OF COMPUTATIONAL VERB CONTROLLERS 91
1) Define Fuzzy Sets: Since the controlled plant must
beasymptotically stable for practical purpose, the initial
errorshould be big. Therefore, it is safe to consider errors in
therange of [|e(0)|, |e(0)|]. Traditionally we use the
membershipfunctions as in Fig. 6 to equally divide the error
range.However, since e(t) exponentially approach to zero in
anasymptotically stable controlled system, we need to pay
moreattention to the region closed to zero because trajectoriesstay
there longer than regions far away from zero. Based onthis
consideration, we choose the supports of the membershipfunctions as
those shown in Fig. 12. Note that the range forcontrol error is
normalized into [1, 1]. The boundaries ofregions shown in Fig. 10
used the supports of fuzzy sets inFig. 12. These membership
functions are given as follows.
PB(x) = max (0, 1 + (x 1) |x 1|) ,PM (x) = max (0, 1 + (x 0.5)
3|x 0.5|) ,PS(x) = max (0, 1 4|x 0.25|) ,ZO(x) = max (0, 1 4|x|)
,NS(x) = max (0, 1 4|x+ 0.25|) ,NM (x) = max (0, 1 (x+ 0.5) 3|x+
0.5|) ,NB(x) = max (0, 1 (x+ 1) |x+ 1|) . (79)
(x)
NB NM NSZO PS PM PB
x0
1
10.50.25-0.25-0.5-1
Bigger
Less than zero 0.125
0.5
Fig. 12. The membership functions of fuzzy numbers splitting the
normalizedrange of control error e(k).
Although the membership functions for Kp and Kd shownin Fig. 7
may not be optimal, for the purpose of comparison,we use them
without revision.
2) Define All Becomes: Here we give the analytic
rep-resentations of all becomes in computational verbs Ve1 toVe7,
Vp1 and Vp2. For the purpose of implementation, wewould like to
choose all becomes independent of the specificdynamics such that we
can program a universal controllerwith as few as possible
parameters left for the users to adjust.With this concern, we
choose the evolving function of everybecome as the piecewise linear
function (67) with a = b =0.5; namely,
Ebecome(state1,state2) =
Tw tTw
, t [0, Tw2 ] ,t
Tw, t [Tw2 , Tw] , (80)
of which the discrete-time form is given by
Ebecome(state1,state2) =
w kw
, k [0, w2 ] , w Z,k
w, k (w2 , w] , k Z. (81)
Note that in the discrete case the life span of become
contains(w+1) sampling points. If w is even then the first half of
thewindow will be 1 sampling point longer than the second halfof
the window. If w is odd, then both half-windows are of thesame
length.
3) Find Verb Similarity Functions: Before we can performany verb
inference we need to find verb similarity functionsof all verbs in
verb set
Ve , {Ve1,Ve2,Ve3,Ve4,Ve5,Ve6,Ve7}and
Vp , {Vp1,Vp2}.Since we need to know the evolving functions of
computa-
tional verbs before we can calculate verb similarity
function,let us find the evolving functions and the evolving
processesof e(t) and Kp(t) for all verbs in Ve and Vp first.
1) Ve1 =become(big, medium). The evolving functionis given
by
Ebecome =
PB(|e(t)|) = Tw t
Tw, t [0, Tw2 ] ,
PM (|e(t)|) = tTw
, t [Tw2 , Tw] .Note that the corresponding waveform of |e(t)|,
e1(t)passes points (0, 1), (Tw2 , 0.75) and (Tw, 0.5). Thereforewe
have the linear interpretation of Ve1 as
e1(t) = 1 t2Tw , t [0, Tw] . (82)
2) Ve2 =become(medium, small). The evolving func-tion is given
by
Ebecome =
PM (|e(t)|) = Tw t
Tw, t [0, Tw2 ] ,
PS(|e(t)|) = tTw
, t [Tw2 , Tw] .Note that the corresponding waveform of |e(t)|,
e2(t)passes points (0, 0.5), (Tw2 , 0.375) and (Tw, 0.25).Therefore
we have
e2(t) = 0.5 t4Tw , t [0, Tw] . (83)
3) Ve3 =become(small, zero). The evolving functionis given
by
Ebecome =
PS(|e(t)|) = Tw t
Tw, t [0, Tw2 ] ,
ZO(|e(t)|) = tTw
, t [Tw2 , Tw] .Note that the corresponding waveform of |e(t)|,
e3(t)passes points (0, 0.25), (Tw2 , 0.125) and (Tw, 0). There-fore
we have
e3(t) = 0.25 t4Tw , t [0, Tw] . (84)
-
92 INTERNATIONAL JOURNAL OF COMPUTATIONAL COGNITION
(HTTP://WWW.YANGSKY.COM/YANGIJCC.HTM), VOL. 3, NO. 2, JUNE 2005
4) Ve4 =become(zero, small). The evolving functionis given
by
Ebecome =
ZO(|e(t)|) = Tw t
Tw, t [0, Tw2 ] ,
PS(|e(t)|) = tTw
, t [Tw2 , Tw] .Note that the corresponding waveform of |e(t)|,
e4(t)passes points (0, 0), (Tw2 , 0.125) and (Tw, 0.25). There-fore
we have
e4(t) =t
4Tw, t [0, Tw] . (85)
5) Ve5 =become(small, medium). The evolving func-tion is given
by
Ebecome =
PS(|e(t)|) = Tw t
Tw, t [0, Tw2 ] ,
PM (|e(t)|) = tTw
, t [Tw2 , Tw] .Note that the corresponding waveform of |e(t)|,
e5(t)passes points (0, 0.25), (Tw2 , 0.375) and (Tw, 0.5).Therefore
we have
e5(t) = 0.25 +t
4Tw, t [0, Tw] . (86)
6) Ve6 =become(medium, big). The evolving functionis given
by
Ebecome =
PM (|e(t)|) = Tw t
Tw, t [0, Tw2 ] ,
PB(|e(t)|) = tTw
, t [Tw2 , Tw] .Note that the corresponding waveform of |e(t)|,
e6(t)passes points (0, 0.5), (Tw2 , 0.75) and (Tw, 1). Thereforewe
have
e6(t) = 0.5 +t
2Tw, t [0, Tw] . (87)
7) Ve7 =become(zero, zero). The evolving function isgiven by
Ebecome =
Z(|e(t)|) = Tw t
Tw, t [0, Tw2 ] ,
Z(|e(t)|) = tTw
, t [Tw2 , Tw] .Note that the corresponding waveform of |e(t)|,
e7(t)passes points (0, 0), (Tw2 , 0) and (Tw, 0). Therefore
wehave
e7(t) = 0, t [0, Tw] . (88)Remark. We use linear interpretations
of ei(t), i = 1, . . . , 7for Ve1 to Ve7. Although linear
interpretation is the simplestone, it is only one of infinite many
possible interpretations.For different dynamical contexts, there
should be differentoptimal interpretations. Therefore, for the
design of verb PIDcontrollers, linear interpretations might not be
optimal. Thistopic need further study because it is closely
connected to theoptimization of the design of verb controllers in
general.
To avoid cluster, let us use the notation V1(V2) to denotethe
degree of similarity of verb V2 to the reference verb V1.
And denote the verb similarity function of verb V with respectto
a verb set V by
VV ,VxV
V(Vx)/Vx. (89)
We assume that the canonical forms in become of V1 and V2are
become(state 1a, state 2a) and become(state1b, state 2b),
respectively. Let x1(t) be an interpretationof V1 and have the
form
x1(t) ={
f(t), t [0, Tw2 ] ,g(t), t [Tw2 , Tw] , (90)
The degree of similarity V1(V2) can be calculated using
thefollowing steps.
1)
a1 = Tw
2
0
min(state 1a(f(t)), state 1b(f(t)))dt,
a2 = TwTw2
min(state 2a(g(t)), state 2b(g(t)))dt,
b1 = Tw
2
0
max(state 1a(f(t)), state 1b(f(t)))dt,
b2 = TwTw2
max(state 2a(g(t)), state 2b(g(t)))dt,
(91)
2)
$ = 2min(
a1b1 + b2
,a2
b1 + b2
). (92)
3)
V1(V2) =a1 + a2b1 + b2
$. (93)
Therefore, the verb similarity functions of all verbs in Vecan
be calculated as follows.
1) VeVe1 . As an illustrating example, let us calculateVe1(Ve2).
We use the linear interpretation in Eq. (82)for verb Ve1. Then it
follows from Eqs. (79), (82) and(91) that
a1 = Tw
2
0
min(PB(e1(t)), PM(e1(t)))dt
= Tw
2
0
PM
(1 t
2Tw
)dt
= Tw
2
0
max(0, 1 +
[(1 t
2Tw
) 0.5
]3(1 t2Tw
) 0.5
) dt=
Tw2
0
t
Twdt =
Tw8, (94)
-
YANG, ARCHITECTURES OF COMPUTATIONAL VERB CONTROLLERS 93
a2 = TwTw2
min(PM(e1(t)), PS(e1(t)))dt
= TwTw2
PS
(1 t
2Tw
)dt
= TwTw2
max(0, 1 4
(1 t2Tw) 0.25
) dt= 0, (95)
b1 = Tw
2
0
max(PB(e1(t)), PM(e1(t)))dt
= Tw
2
0
PB
(1 t
2Tw
)dt
= Tw
2
0
max(0, 1 +
[(1 t
2Tw
) 1]
(1 t2Tw
) 1) dt
= Tw
2
0
1 tTw
dt =3Tw8
, (96)
b2 = TwTw2
max(PM(e1(t)), PS(e1(t)))dt
= TwTw2
PM
(1 t
2Tw
)dt
= TwTw2
max(0, 1 +
[(1 t
2Tw
) 0.5
]3(1 t2Tw
) 0.5
) dt=
TwTw2
t
Twdt =
3Tw8
. (97)
Therefore, we have $ = 0, VeVe1(Ve2) = 0. Using thesame method
we can find other elements of VeVe1 as
VeVe1 = 1/Ve1 + 0/Ve2 + 0/Ve3 + 0/Ve4
+0/Ve5 +19
/Ve6 + 0/Ve7. (98)
2)VeVe2 = 0/Ve1 + 1/Ve2 + 0/Ve3 + 0/Ve4
+19
/Ve5 + 0/Ve6 + 0/Ve7. (99)
3)
VeVe3 = 0/Ve1 + 0/Ve2 + 1/Ve3 +19
/Ve4
+0/Ve5 + 0/Ve6 +19
/Ve7. (100)
4)
VeVe4 = 0/Ve1 + 0/Ve2 +19
/Ve3 + 1/Ve4
+0/Ve5 + 0/Ve6 +19
/Ve7. (101)
5)
VeVe5 = 0/Ve1 +19
/Ve2 + 0/Ve3 + 0/Ve4
+1/Ve5 + 0/Ve6 + 0/Ve7. (102)6)
VeVe6 =19
/Ve1 + 0/Ve2 + 0/Ve3 + 0/Ve4
+0/Ve5 + 1/Ve6 + 0/Ve7. (103)7)
VeVe7 = 0/Ve1 + 0/Ve2 +19
/Ve3 +
19
/Ve4
+0/Ve5 + 0/Ve6 + 1/Ve7. (104)Remark. If the interpretations are
linear, then we can find VVdirectly from the membership functions
of the states. Sincethe choice of the membership functions, we can
guaranteethat in each verb similarity function there are only
twokinds of non-zero degrees of verb similarity, one of whichis
dominate at 1 while the other is as small as 1/9. It iscounter to
our intuition to have a verb similarity 1/9 with thereversed
counterpart. For example, become(big, medium)has a 1/9 verb
similarity to become(medium, big) while has a0 similarity to
become(medium, small). This counter intuitioncan be easily solved
by expanding the overlap ranges of thesupports of fuzzy sets. It
can also be solved by putting moreweights on the trends when the
verb similarity is calculated.This is an attracting topics for
further researches.
Assume linear interpretations of Kp(t), the verb
similarityfunctions of both verb in Vp can be found as follows.
1) Since the symmetry of big and small for Kp(t), VpVp1can be
found by the following processes.
a1 = 10.5
14lnxdx
= x4lnx+
x
4
10.5
= 0.0384,
b1 = e4 + 0.5e4
14lnxdx
= e4 + x4lnx+
x
4
0.5e4
= 0.207,
a2 = 0.0384, b2 = 0.207,
$ = 2 0.03842 0.207 = 0.1855,
Vp2Vp1
= $a1 + a2b1 + b2
= 0.1855 0.03840.207
= 0.0344. (105)Here we have
VpVp1
= 1/Vp1 + 0.0344/Vp2.
2) From the symmetry of big and small we haveVpVp2
= 0.0344/Vp1 + 1/Vp2.
Since 0.0344 is small comparing with 1, in practical
applica-tions, we can ignore it.
-
94 INTERNATIONAL JOURNAL OF COMPUTATIONAL COGNITION
(HTTP://WWW.YANGSKY.COM/YANGIJCC.HTM), VOL. 3, NO. 2, JUNE 2005
4) Implementing Verb Inferences: Now that we have de-fined all
verb similarity functions, we are proceeding toimplement the verb
inferences based on verb rules in Table VIIor Table VIII. For each
rule, we first find an adverb , calledfiring adverb, by comparing
the verb similarity between theverb phrase in its premise and the
computational verb ob-served, which is the verbifying result of
|e(k)|. By applyingthe adverb to the verb phrase in the consequence
of theverb rule we can calculate the contribution of this rule to
thechange of Kp. The finally decision of changing Kp is foundby
applying a de-verbification to the contributions from allrules.
Here we choose the following de-verbification
Kp(k + 1) = Kp(k) + 7i=0
ii (106)
where i and i are the firing adverb and full contribution
forrule i, respectively. is a weighting factor. The
de-verbifyingresults of Vp1 and Vp2 are denoted, respectively, by
p1 andp2 and given by
p1 = e{10[S(observed,Vp2)S(observed,Vp1)]},
p2 = e{10[S(observed,Vp1)S(observed,Vp2)]}. (107)Observe that p1
and p2 are two datums for the de-verbification of Vp1 and Vp2. The
intuition behind Eq. (107) isthat the dynamics of Kp(t) are spanned
by two complementaryverbs; namely, Vp1 and Vp2. Let us assume that
we want thedynamics of Kp(t) to be the same as Vp1, then there are
twocases.
1) If at a moment we observe that Kp(t) is more like toVp1, then
we do not need to change it too much becauseit behaves as expected.
This is implemented by settingp1 1.
2) If at a moment we observe that Kp(t) is more like toVp2, then
we need to change it fast into Vp1 becausewe are expecting Vp1.
This is implementing by settingp1 > 1.
In the rules we use two adverbs fast and slowly to modifythe
dynamics of Vp1 and Vp2. The relation between the de-verbification
of Vp1 and fast Vp1 is given by
fastVp1 = fast p1. (108)Also, the relation between the
de-verbification of Vp1 andslowly Vp1 is given by
slowlyVp1 = slowly p1. (109)The same can be said to Vp1 and two
adverbs fast andslowly.
We calculate the contributions from all rules as follows.1)
Implementing C1: IF |e(k)| become(zero, zero),
THEN Kp become(small, big). The contributionof this rule is
(1 [S(observed, become(small, big))])= 1 p2
where () denotes the effect of the de-verbifying block.
2) Implementing C2: IF |e(k)| become(big, medium),THEN Kp fast
become(big, small). The contri-bution of this rule is
(2 [S(observed, fast become(big, small))])= 2 fastVp1= 2 fast
p1
where the negative sign reflects the fact of Kp decreasingwith
negative changing rate.
3) Implementing C3: IF |e(k)| become(medium,small), THEN Kp
become(big, small). Thecontribution of this rule is
(3 [S(observed, become(big, small))])= 3 p1.
4) Implementing C4: IF |e(k)| become(small, zero),THEN Kp slowly
become(big, small). Thecontribution of this rule is
(4 [S(observed, slowly become(big, small))])= 4 slowlyVp1= 4
slowly p1.
5) Implementing C5: IF |e(k)| become(zero, small),THEN Kp slowly
become(small, big). The con-tribution of this rule is
(5 [S(observed, slowly become(small, big))])= 5 slowlyVp2= 5
slowly p2.
6) Implementing C6: IF |e(k)| become(small,medium), THEN Kp
become(small, big). Thecontribution of this rule is
(6 [S(observed, become(small, big))])= 6 p2.
7) Implementing C7: IF |e(k)| become(medium, big),THEN Kp fast
become(small, big). The contri-bution of this rule is
(7 [S(observed, fast become(small, big))])= 7 fastVp2= 7 fast
p2.
5) Simulation Re








![Introduktion - Uppsala University · Huvudsats [Verb PRN] [Verb PRN] [PRN Verb] Bisats [Verb PRN] [PRN Verb] [PRN Verb] Engelska L2 Franska L2 n=22 n= 22 och en kontrollgrupp tyska](https://img.dokumen.tips/doc/110x75/60610a51f880885061013ebd/introduktion-uppsala-huvudsats-verb-prn-verb-prn-prn-verb-bisats-verb-prn.jpg)