Embed Size (px)
DESCRIPTION
Citation preview

Integration of Arcade SteeringIn pursuit of designing a system that has versatility, consistency, and reliability The ÜberBots brainstormed
many ideas for possible control systems. Much research and prior experience led us to design a drive system with many permutations, driver tuning, and an advanced system of automated error correction. A major innovation in our control system was the integration of arcade steering, which assisted the other steering modes reach the desired positions swiftly. To successfully execute this system, the software team designed a function which would calculate the error from the closed-loop steering system and proportionally incorporate the error to adjust the speed of the drive motors. Therefore, in addition to rotating the two pairs of wheels attempting to turn the robot, arcade drive is used to compensate for any error that would otherwise be left uncorrected in a separated turning loop.

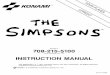
Speed of Wheels Relative to Rate of Turning
Speed
of
Wheels
Joystick X-axis
Red – Outside Wheels Blue – Inside WheelsFurthermore, due to the design of the robot, when in a 90 degree drive system the wheels are offset a few inches. Although it is only a few inches, the original control system was designed around swerve and traverse drive trains. Therefore, when a 90 degree turn was executes during the 90 degree drive mode the robot would lose a significant amount of control. In order to correct this, the ÜberBots fine-tuned a control algorithm that slowed the speed down relative to the magnitude of turn. Illustrated in the table above, there is a direct variation of wheel speed relative to the X-axis. This function not only improves control, but when implemented on our drive train, the robot can pivot a full 360 degrees in place. The ability to pivot is a major asset, because this allows the robot to rotate the kicker towards the goal without moving the robot’s position on the field. As a result, with the assistance of driver input or camera coordinates, our robot can rotate the kicker preciously and efficiently in order to quickly manipulate game pieces.