-
Finite Elements Spring System Analysis
Third lecture, fall 2015
-
Illustration of direct method with rigid bodies connected by
springs
For a single spring, oriented along the x-direction, obeying the
simple linear spring law (f = kd, where d is spring elongation and
k is spring rate, and f is force)
f1 is force felt at node 1 (that is, local node number 1), and
f2 is force felt at (local) node number 2
u1 is displacement in the positive x-direction of node 1, and u2
is displacement of node 2
d is calculated as the difference between u2 and u1.
2
1
2
1
11
11
u
uk
f
f
-
Some definitions:
Node: a point in space, possessing one or more degrees of
freedom;
Degree of freedom (DOF): the independent response of a node to
external stimulus.
For structures, the response is displacement. For thermal
problems the response is either temperature or temperature change.
For other problems, there are other DOF.
They are theoretically changeable independent of each other.
Element: a piece of the solution domain (i.e., the field)
bounded by nodes and possessing an interpolation function (more
later.)
-
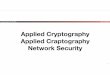
Illustration of the direct method: system of rigid bodies
connected by springs
-
The example problem:
Element nodal information
Element Local I j
stiffness
1 1 2 k1
2 2 3 k2
3 2 4 k3
4 2 5 k4
5 4 5 k5
6 4 6 k6
-
Balance of forces at each node
-
Assembly into a global equation set For each element, write the
element stiffness equation, f = kq.
Recall that the local node numbers 1 and 2 correspond to global
node numbers that may differ. For example, element number 4
connects nodes 2 and 5, so we have, for that element only,
Note that rows of the stiffness matrix correspond to force
components, and columns multiply displacements. This is a useful
concept for assembly.
5
2
44
44
)4(
5
2
u
u
kk
kk
f
f
-
Assembly, continued
We next establish a n-by-n matrix of all-zero values to serve as
our GLOBAL stiffness matrix, K. Into this matrix we add in
stiffnesses of the individual elements. For example, with element
4, only, we have
6
5
4
3
2
1
44
44
4
5
4
2
000000
0000
000000
000000
0000
000000
0
0
0
0
u
u
u
u
u
u
kk
kk
f
f
As in your text, note that the parentheses in the superscripts
have been removed for ease of expression. The forces shown above
are on element 4, not raised to the fourth power.
-
Assembly, continued
Other elements also share nodes, so they go into (in some cases)
the same location as terms that have already been placed into the
global K matrix. In this case, we simply add terms. For elements 1
and 4, only:
6
5
4
3
2
1
44
4411
11
4
5
4
2
1
2
1
1
000000
0000
000000
000000
000)(
0000
0
0
0
u
u
u
u
u
u
kk
kkkk
kk
f
ff
f
-
Assembly, completed
After all elements have been included, we get
6
5
4
3
2
1
66
5454
656533
22
43243211
11
6
6
5
5
4
5
6
4
5
4
3
4
2
3
4
2
3
2
2
2
1
2
1
1
0000
0)(00
)(00
0000
0)(
0000
u
u
u
u
u
u
kk
kkkk
kkkkkk
kk
kkkkkkkk
kk
f
ff
fff
f
ffff
f
The above represents the GLOBAL stiffness equation, written in
short form as KSQS = FS. The subscript S stands for system, and
indicates a fully formed problem (which needs to be reduced prior
to solution).
-
Forces; Boundary Conditions and Reactions The summed forces at
the nodes which appear in the global
equation are easily dealt with: they represent the sum of
internal forces on the elements, and must exactly balance the
externally applied forces. These sums can thus be replaced by the
net external force acting at the node, when that force is
known.
The external force must always be known at every node, except in
one instance: if the node is constrained to have some specific DOF
value at the end of the motion, then there is an unknown force at
the node.
At all unconstrained nodes, the force is known or zero, but
displacement is unknown. At all constrained nodes, the displacement
is known, but the net external force is not.
-
Forces; Boundary Conditions and Reactions, continued Forces that
must exist in order to ensure proper final DOF
values are called reactions. They do not appear in our system
equations, except as unknown values.
Unconstrained nodes have zero-valued reactions.
To account for this, we proceed as follows: Substitute Ri for
the force term for any constrained node;
Substitute the known external force for the force term at any
unconstrained node;
Separate the global equation into two parts: Set aside any line
that corresponds to a reaction force;
Multiply known values of displacement by the appropriate terms
of the stiffness matrix, and remove to the other side of the
stiffness equation.
Result is a REDUCED, GLOBAL stiffness equation, (KQ = F) which
is solvable so long as enough boundary conditions have been
asserted.
-
Forces; Boundary Conditions and Reactions, Numerical example
Consider the case where all Ks are 100. and external forces are
3 = 5 = 1000
By applying boundary conditions, 1 = 6 = 0,the system of
equations become
-
Forces; Boundary Conditions and Reactions, continued
The reduced system of equations
Which can be solved for 2, 3, 4, 5
The reaction at each wall can be obtained from the first and
sixth equations (removed from the reduces system of equations),
once 2, 4 are known:
-
Solving the reduced set of equations
The answer is:
The reaction forces must balance the applied loads. For this
problem, we asserted a 1000 N force; The reactions must thus add to
-1000 N, to balance the applied load.
-
Bars:
16
-
The bar element, in 1-D space
For a bar of constant cross-sectional area and constant modulus
of elasticity, we have the equation from Strength of Materials
where s is uniaxial stress, E is the modulus of elasticity and e
is the uniaxial strain
We also have the equation for strain as (using coordinate x to
define location and u to define motion in the x-direction)
17
es E
dx
duE
dx
du se
-
The 1-D bar, continued
Again from Strength of Materials, we have the following
approximation:
And if the force on the bar is evenly distributed over a
cross-section, then we further have
Putting all of the pieces together, then, we get
18
L
uu
L
L
dx
du )( 12
Af s
)( 12 uuL
EAf
-
The 1-D bar, concluded
As with the spring, we note that
Sum of the nodal forces must be zero, hence the two end forces
are equal, opposite
The equation found so far is for tensile response (u2 >
u1)
Hence, we arrive to the equation for the bar element, in 1-D
space,
which is exactly analogous to the FE equation set for a spring,
only substituting the extensional stiffness (EA/L) for the spring
rate k. 19
j
i
j
i
u
u
L
EA
f
f
11
11
-
1-D Steady-State Heat Conduction
By Fourier Law, 1-D conduction is defined by
=
=
(2 1)
Heat Flux is positive if heat flows INTO the bar, so the
equation defines q1; No heat build-up in the bar, so q2 = -q1
Thus
2
1
2
1
11
11
T
T
L
kA
q
q
20
-
Direct Method
For each of the cases shown, we started with a known, simplified
solution to the differential equation:
=
=
21
21
= = 2 1
We simply asserted the known solution into the DE and
manipulated to get a linear algebraic set
IN ESSENCE, what we have done is insert a chosen solution into
the DE, and the linear algebraic equivalent materializes as a
result of our choice.
21
-
Notes:
See the amazing similarity between the three equation sets:
Except for the leading constants (k, EA/L or kA/L) and the terms
used for displacement (true displacement or temperature), the
equation sets are identical.
Each has transformed a first-order DE into a linear algebraic
equation set.
Each element has two nodes, each node has one DOF, so each
element has two DOF (two nodes x one DOF/node) and each has a (2x2)
equation set. THIS IS NOT COINCIDENTAL. Element equation sets will
always be (nxn) where there are n DOF in the element.
22
-
Assumptions built into the equations: Each bar has constant
modulus E and constant cross-sectional
area A (though bars can differ from each other.) Similarly all
conduction elements have constant k, A and all springs have
constant k.
Use multiple connected bars, each with constant modulus and area
to emulate either material variations or cross-sectional area
changes; similar with springs, conduction bars
A tapered bar, for example, is modeled as a set of bars that
have areas that step to approximate the taper
All loading is done at the nodal locations 1 and 2.
Ensure this by choosing to put a node at every loading or
support point
23
-
Sets of Elements: Assembly
A single element is typically not very useful.
A structure or system is usually made up of multiple
elements.
Real problems are solved by using many elements, connected at
the nodes.
The process of putting together multiple elements to form an
equation set for the connected whole is called ASSEMBLY.
In the assembly phase the elemental equation sets f = kq yield
up the GLOBAL equation set F = KQ
24
-
Simple Compound Bar (1)
25
-
Simple Compound Bar (2)
Putting in values for E1, E2, etc., in the stiffness matrix
completes the assembly, for this simple bar problem. We will input
values in the force side and the displacement vectors later.
26