Embed Size (px)
Citation preview

CMCAA 2016CMCAA 2016
Applications of Information Geometry
to Hypothesis Testing and
Signal Detection
Applications of Information Geometry
to Hypothesis Testing and
Signal Detection
Yongqiang ChengYongqiang Cheng
National University of Defense TechnologyNational University of Defense Technology
July 2016July 2016

1. Principles of Information Geometry
2. Geometry of Hypothesis Testing
3. Matrix CFAR Detection on Manifold of
Symmetric Positive-Definite Matrices
4. Geometry of Matrix CFAR Detection
OutlineOutline

3
1. Principles of Information Geometry1. Principles of Information Geometry
Important problems in statisticsDistribution (likelihood):where
is a vector of data
is a vector of unknowns
1. How much does the data tell about the unknown ?
2. How good is an estimator ?
3. How to measure difference between two distributions?
4. How about the structure of a statistical model specified by a family of distributions?
( | )p x θ
xθ
x θ
θ̂

4
1. Principles of Information Geometry1. Principles of Information Geometry
Data processing Statistics Information Geometry
Data Distributions Manifold
What is information geometry?

5
1. Principles of Information Geometry1. Principles of Information Geometry
Information geometry is the study of intrinsic properties of manifolds of probability distributions by way of differential geometry.
The main tenet of information geometry is that many important structures in information theory and statistics can be treated as structures in differential geometry by regarding a space of probabilities as a differentiable manifold endowed with a Riemannian metric and a family of affine connections.
Information Geometry
Information Theory
StatisticsProbability
Theory
Differential Geometry
RiemannianGeometry
Systems Theory
Physics
Relationships with other subjects

6
1. Principles of Information Geometry1. Principles of Information Geometry
Statistical manifold
Riemannian metric
Affine connections
Distance and geodesic
Curvatures
, , ( | ) | ,nG p R x θ x θ
log logi j
p pG E θ
θ θ
2 ( ) ( )Tij i jds g d d d d θ θ G θ θ
l l l l s l sijk ik ij js ik ks ijj k
s
Rx x
1( ) ( , ) ( , ) ( , ) ( , ) ( , )2
jim j i m j i mE l l E l l l θ θθ x θ x θ x θ x θ x θ

OutlineOutline
1. Principles of Information Geometry
2. Geometry of Hypothesis Testing
3. Matrix CFAR Detection on Manifold of
Symmetric Positive-Definite Matrices
4. Geometry of Matrix CFAR Detection

8
2. Geometry of Hypothesis Testing 2. Geometry of Hypothesis Testing
0( | )P x
1( | )P x
x
1)Start from target detection
-30 -20 -10 0 10 20 30 -30 -20 -10 0 10 20 300
10
20
30
40
50
60
70
80
90
100
Hypothesis testing

9
• PrinciplesMake division of observation space
• Basic methodThe detector decides if the likelihoodratio exceeds a threshold
• Essentials of signal detectionDiscrimination between two identically distributed distributions with different parameters.
1
0
( | )( )( | )
pLp
xxx
0( | )P x
1( | )P x
x
1
0
( | )( )( | )
pLp
xxx
Likelihood ratio test
2)Likelihood ratio test
1
2. Geometry of Hypothesis Testing 2. Geometry of Hypothesis Testing

10
A B
C D
B
A( , )Fd A B
D
C
( , )Fd C D
Family�of�distributions Statistical�manifold
2
2
1; , exp22
xp x
2, ; 0H R
Consider hypothesis testing from a geometric viewpoint
2. Geometry of Hypothesis Testing 2. Geometry of Hypothesis Testing
3)Geometric interpretation of hypothesis testing

11
2. Geometry of Hypothesis Testing 2. Geometry of Hypothesis Testing
• Equivalence between LRT and Kullback-Leibler divergenceSuppose are i.i.d. observations from a distribution ,
and there are two models (hypotheses) for , denoted by
and . Then, the likelihood ratio is
• Error exponent:
• Stein’s lemma:
1
0
1
1 0
( )( )
Ni
i i
p xLp x
1 2, , , Nx x x ( )q xN0 ( )p x
1( )p x
( )q x
1
00 1( || ) ( || ) 1D q p D q
Np
KLD
Minimum distance detector1lim log MN
K PN
0 1( || )K D p p 2 NKMP
3)Geometric interpretation of hypothesis testing
( )( || ) ( ) ln( )
q xD q p q x dxp x

12
3)Geometric interpretation of hypothesis testing
2. Geometry of Hypothesis Testing 2. Geometry of Hypothesis Testing
X
1d
0( | )p x
S
( | )p x θ
1( | )p x θ0( | )p x θ
x
0d
1( | )p x
1
00 1( || ) ( || ) 1D q p D q
Np
Minimum distance detector
The problem of hypothesis testing can be regarded as a discrimination problem where the decision is made by comparing distances from the signal distribution estimates to two hypotheses in the sense of the KL divergence, i.e., selecting the model that is “closer” to signal distribution estimates.

OutlineOutline
1. Principles of Information Geometry
2. Geometry of Hypothesis Testing
3. Matrix CFAR Detection on Manifold of
Symmetric Positive-Definite Matrices
4. Geometry of Matrix CFAR Detection

14
1)Constant false alarm rate detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
samples
targets
detection�cell ba
c
1x 2Nx2 1Nx Dx 2Nx 2 1Nx Nx
Arithmetic mean
Decision
Threshold
01
……
……
……
……
0: target absent1: target present
Classical CFAR detectorDecision by comparing the
content of the cell under
test with an adaptive
threshold given by the
arithmetic mean of the
reference cells to achieve
the desired constant
probability of false alarm.

15
2)Matrix CFAR detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
1R
2R iR
1iR
NR
RDR
In 2008, F. Barbaresco proposed a generalized CFAR technique based on the manifold of symmetric positive definite (SPD) matrices.It has been proved that the Riemannian distance-based detector has better detection performance than the classical CFAR detector.
1R iR 1iR NR
R R

16
2)Matrix CFAR detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
• Riemannian distance between two SPD matrices
• Riemannian center of N SPD matrices
where p=1, denotes the median; p=2, is the mean.
• The matrix CFAR detector
22 1 2 1 2 2
1 2 1 2 11
, ln lnn
kk
d
R R R R R
1
arg min ,N
pi i
iw d
RR R R
R R
, id R R

17
2)Matrix CFAR detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
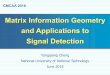
Initial spectra of measurements Mean spectra of measurements
Intensity Classical detector Geometric detector

18
3)Robust matrix CFAR detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
• Two shortcomings of the Riemannian distance based matrix CFAR detectora) Computational cost is expensive for exponential
operations in the calculation of Riemannian distance and its average;
b) Riemannian mean and median are not robust to outlier.

19
3)Robust matrix CFAR detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
• Symmetrized Kullback-Leibler (sKL) divergence based matrix CFAR detector
• Total Kullback-Leibler (tKL) divergence based matrix CFAR detector
CUT
DivergenceComputation >Threshold
1R iR i+1R NR
sKL mean, sKL median, tKL t center
Covariance Matrix R
Sample Data

20
3)Robust matrix CFAR detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
• sKL divergence between two SPD matrices
• sKL mean of N SPD matrices
• sKL median of N SPD matrices
1 11 2 1 2 2 1, tr( 2 ) sKL R R R R R R I
1 211
=1 =1
1 1=
N N
i ki kN N
R R R
1 211
11 1, ,
N Nji
ki jk i k jsKL sKL
RRR
R R R R

21
3)Robust matrix CFAR detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
• The tKL divergence is a special case of the total Bregman divergence tBD, which is invariant to linear transformation.
BD ,x y
tBD ,x y BD ,x y
tBD ,x y
( , ) ,BD x y f x f y x y f y
2
,( , )
1
f x f y x y f ytBD x y
f y
More robust

22
3)Robust matrix CFAR detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
• tKL divergence between two SPD matrices
• tKL center of N SPD matrices
1 11 2 2 1
1 2 22
2
log det,
log det 1 log 22 log det
4 2
tr ntKL
nc
R R R RR R
RR
11
12
,
log det 1 log 2where 2 log det
4 2
ii i i
i jj
ii i
w w
nc
R R
RR
inversely proportional to the value of divergence gradient, which is robust to outliers

23
3)Robust matrix CFAR detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
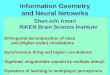
• Comparisons of dissimilarity measures between Riemannian distance, sKL divergence and tKL divergence
The signal-to-clutter ratio (SCR) is significantly improved by the mapping of tKL divergence.

24
3)Robust matrix CFAR detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
• Comparisons of detection performance between Riemannian distance, sKL divergence and tKL divergence
The tKL divergence based matrix CFAR detector has better performance.

25
3)Robust matrix CFAR detector
3. Matrix CFAR Detection3. Matrix CFAR Detection
Algorithm Time (s)Riemannian mean detector 29.74
Riemannian median detector 41.66
sKL mean detector 0.09
sKL median detector 2.81
tKL t center detector 0.15
Table IThe time taken by different algorithms

OutlineOutline
1. Principles of Information Geometry
2. Geometry of Hypothesis Testing
3. Matrix CFAR Detection on Manifold of
Symmetric Positive-Definite Matrices
4. Geometry of Matrix CFAR Detection

27
Classical CFAR detectorEuclidean spaceEuclidean distance measure
Matrix CFAR detectorMatrix manifoldRiemannian distance measureKL divergence, etc.
A good detector should
Properly characterize the intrinsic structure of the measurement space
Maximize the divergence between two hypotheses (clusters)
4. Geometry of Matrix CFAR Detection4. Geometry of Matrix CFAR Detection
1R
2R iR
1iR
NR
RDR
1R NR
1iR
iR2RRDR

28
Other divergences which have better performance to measure the dissimilarity between distributions
Better approaches for clustering the distributions
Detectors for heavy clutters
Detectors for nonstationary clutters
Detectors for few samples
4. Geometry of Matrix CFAR Detection4. Geometry of Matrix CFAR Detection
Future work

Thank you for your
attention!
Thank you for your
attention!