Embed Size (px)
Citation preview

Applications of Adjoint Methods for Applications of Adjoint Methods for Aerodynamic Shape OptimizationAerodynamic Shape Optimization
Arron Melvin
Adviser: Luigi Martinelli
Princeton University
FAA/NASA Joint University Program for Air Transportation
Quarterly Review
MIT
October 23, 2003

OutlineOutline
Progress Report / Review 3D Design Code for Unstructured Grids
Application of Adjoint Method to Rotating Geometry Penn State ARL (James Dreyer) - Princeton
University collaboration Hydrodynamic Propulsors
Summary

Adjoint Based Shape Optimization Adjoint Based Shape Optimization for Unstructured Gridsfor Unstructured Grids
Control Theory Approach as used on structured grids
Challenge in computation of the gradient for unstructured grids Reduced gradient formulation Gradient is derived solely from the adjoint solution and
the surface displacement, independent of the mesh modification
Methods to impose thickness constraints Cutting planes at span-wise locations & transformations

MotivationMotivation
Historical Propulsor Design Methodology – “cut & try”
Parametric
DesignDrafting
Model Design / Assembly
WT / TT Test
Interpretation
Detailed Design O(1y)

MotivationMotivation
Current Propulsor Design Methodology – “virtual cut & try”
Parametric
DesignCAD
Simulation
(AXI / 3D RANS)
Interpretation
Detailed Design O(1-2m)
Model Design / Assembly
WT / TT Test
Interpretation
Verification

BackgroundBackground
Focus of gradient-based approaches has been on the efficient determination of the cost function gradient b TI
Finite Difference
(work ~ ND )
Sensitivity Analysis( introduce R(w,F)=0 )
Continuous
DirectDifferentiation
(work ~ ND )
AdjointVariable
(work ~ Nh+1)
Discrete
DirectDifferentiation
AdjointVariable
(work ~ Nh+1 )
ii b
FwIFFwwI
b
I
),(),(
ii bb
Rw
w
R ˆˆ
ˆ
ˆ
wψ
w
Rˆ
ˆˆ
ˆ
IT
TTTTT Jt
J Dψ
Cψ
Bψ
Aψ
P
ComplexVariables
AutomaticDifferentiation

ApproachApproach
Shape Optimization of Propulsors
Shape Optimization
for
Detailed Design
High-fidelity
flow models
Large ND
Gradient-based
Adjoint Variable
discrete continuous

Flow & Adjoint SolversFlow & Adjoint Solvers
Cell-centered finite volume on hexahedra Central difference + scalar, 0(3) artificial dissipation Jameson-type Hybrid Multistage Scheme (5-3) Local time-stepping, multigrid (W) Domain decomposition / MPI Baldwin-Lomax algebraic eddy viscosity
SAME algorithm applied to Adjoint equations

Surface mesh point movement in the direction of the local quasi-normal vector, i.e.,
Design VariablesDesign Variables
tbxs

Shape OptimizationShape Optimization
Gradient-based approaches:
Steepest Descent: Relatively tolerant of errors in the gradient Partially-converged flow & adjoint solutions NO univariate searches
Conjugate Gradient & Quasi-Newton Very accurate gradient
Fully-converged flow & adjoint solutions One-dimensional minimization
O(4) fully-converged flow solutions
kkk db
kk Gd

Shape OptimizationShape OptimizationFlow ChartFlow Chart
Single-point design:
Flow Field SolutionFlow Field Solution
Adjoint B.C.sAdjoint B.C.s
Adjoint Field SolutionAdjoint Field Solution
Gradient CalculationGradient Calculation
Blade Shape ChangeBlade Shape Change
Domain Re-meshingDomain Re-meshing Final DesignFinal Design
NDES

ApplicationApplication
Marine propulsor / pumpblade shape optimization
Cost Function: Inverse Design
,2
2
1 dSppIbB d
pressuretargetpd HIREPHIREP
Bi
P
B1e
B2e
W
Bc
Bh
Bb
P
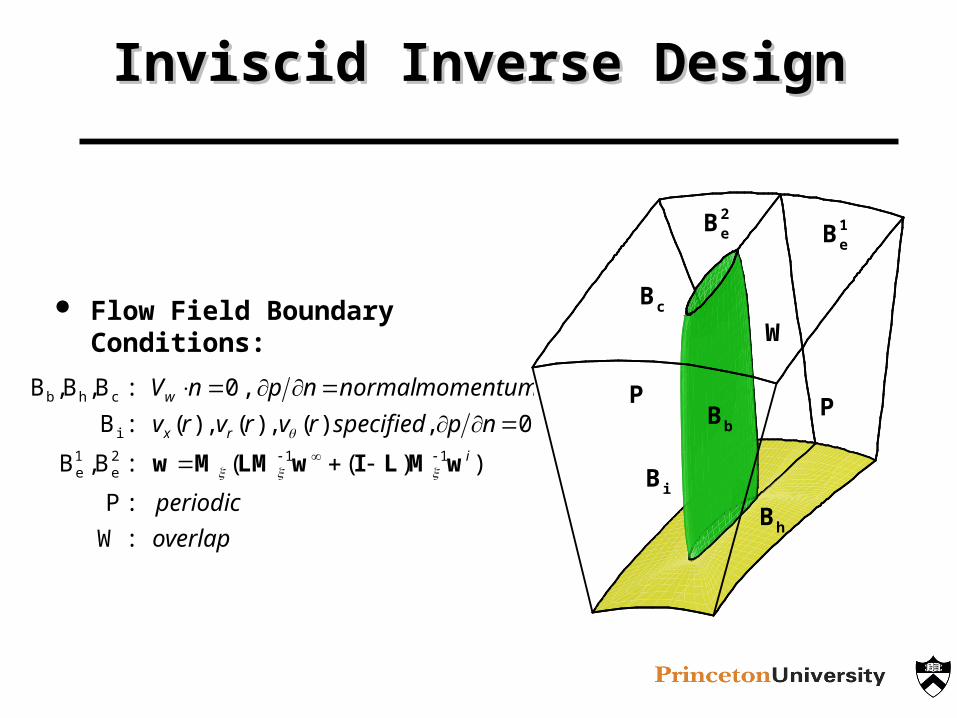
Inviscid Inverse DesignInviscid Inverse Design
Flow Field Boundary Conditions:
overlap
periodic
npspecifiedrvrvrv
momentumnormalnpnV
i
rx
w
:
:
))((:
0,)(,)(,)(:
,0:
11
W
P
B,B
B
B,B,B
2e
1e
i
chb
wMLIwLMΜw
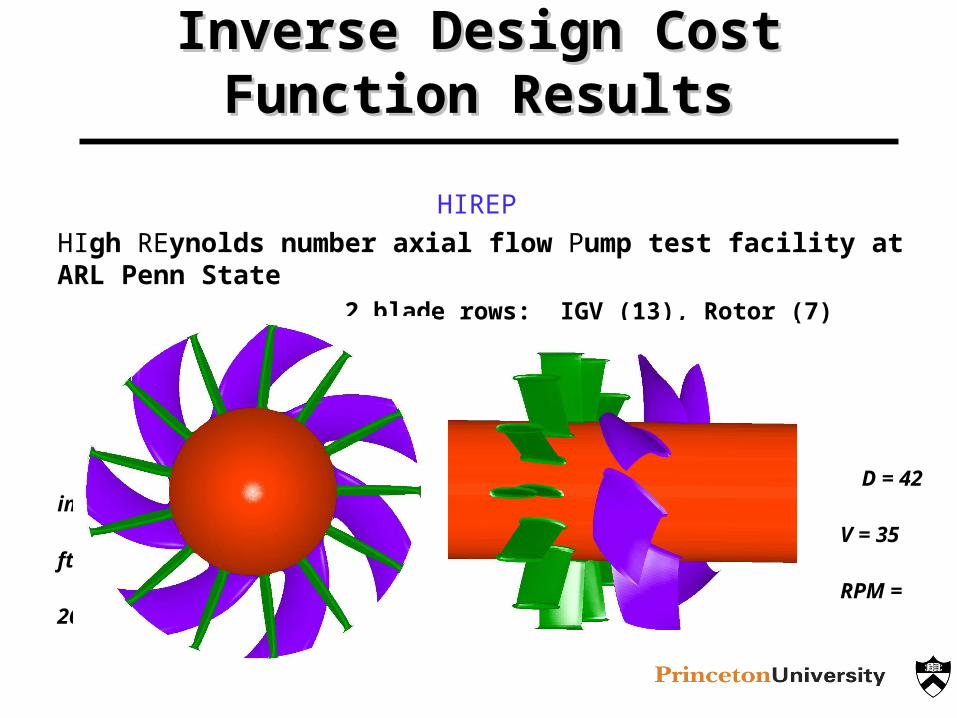
HIREPHIgh REynolds number axial flow Pump test facility at ARL Penn State
2 blade rows: IGV (13), Rotor (7)
D = 42 in.
V = 35 ft/sec
RPM = 260
Inverse Design Cost Function Inverse Design Cost Function ResultsResults

Inviscid ResultsInviscid Results
Inlet Guide Vane (IGV) & Rotor
Governing equations:3D incompressible Euler
Initial blade:NACA 0012 sections
Geometric constraint:Fixed chord line
Target pressure distributions:Separate simulations ofHIREP IGV & rotor

x / RH
Cp
-0.25 0 0.25-1.0
-0.5
0.0
0.5
1.0
ROOT
x / RH
Cp
-0.25 0 0.25
-1.0
-0.5
0.0
0.5
1.0
MID-SPAN
x / RH
Cp
-0.25 0 0.25
-0.5
0.0
0.5
1.0
targetinitialdesignTIP
Inviscid Results - IGVInviscid Results - IGV
ND-CYC
I
I rm
s
0 50 100 150 200 250 30010-6
10-5
10-4
10-3
10-2
10-1
100
10-6
10-5
10-4
10-3
10-2
10-1
100
IIrms
IGV
IGV Inverse Design(no rotation)
ND = 6321

x / RH
y/R
H
-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0
0.0
0.1
0.2
ROOT
x / RH
y/R
H
-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0
-0.1
0.0
0.1TIP
x / RH
y/R
H
-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0
0.0
0.1
0.2
targetinitialdesignMID-SPAN
Inviscid Results - IGVInviscid Results - IGV
DESIGN
INITIAL MID-SPAN
0.4
0.2
0.0
-0.2
-0.4
-0.6
TARGET
Cp

Inviscid Results - RotorInviscid Results - Rotor
Rotor Inverse Design(260 RPM)
ND = 6321
ND-CYC
I
I rm
s
0 50 100 150 200 250 30010-6
10-5
10-4
10-3
10-2
10-1
100
10-6
10-5
10-4
10-3
10-2
10-1
100
IIrms
ROTOR x / RH
Cp
-0.25 0 0.25
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
ROOT
x / RH
Cp
-0.25 0 0.25-4.5-4.0-3.5-3.0-2.5-2.0-1.5-1.0-0.50.00.51.01.52.0
targetinitialdesignTIP
x / RH
Cp
-0.25 0 0.25-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
MID-SPAN

Inviscid Results – Rotor DetailInviscid Results – Rotor Detail
x / RH
y/R
H
-0.8 -0.6 -0.4 -0.2 0.0
0.0
0.1
0.2
0.3
0.4
0.5
0.6
ROOT
x / RH
y/R
H
-0.8 -0.6 -0.4 -0.2 0.0
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
MID-SPAN
x / RH
y/R
H
-0.4 -0.2 0.0
-0.1
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
targetinitialdesign
TIP
Fixed LElocation
Mid-Span Leading Edge Detail

Inviscid Results – Rotor Inviscid Results – Rotor Trailing Edge DetailTrailing Edge Detail
DESIGN
INITIAL
X
YZ
DESIGN
0.8
0.4
0.0
-0.4
-0.8
-1.2
-1.6
-2.0
TARGET
Mid-span Cp

Inviscid Results – RotorInviscid Results – RotorInverse Design ConvergenceInverse Design Convergence
x / RH
Cp
-0.25 0.00 0.25
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
targetinitialdesign cycle 001design cycle 005design cycle 025design cycle 100design cycle 250
ROTOR MID-SPAN
section Cl
r/R
H
-1.2 -1.1 -1.0 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2
1.0
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2.0
targetinitialdesign cycle 001design cycle 005design cycle 025design cycle 100design cycle 250
ROTOR

Inviscid Results - SummaryInviscid Results - Summary
COARSE MESH
41,225 mesh points
1,625 design variables
Wall Clock
8 CPUs (PIII)
seconds
% of Total
Flow Solution 5.39 48
Adjoint Solution 5.21 46
Gradient / Re-meshing 0.63 6
Total 11.23 100
FINE MESH
312,081 mesh points
6,321 design variables
Wall Clock
16 CPUs (PIII)
seconds
% of Total
Flow Solution 22.21 46
Adjoint Solution 21.20 44
Gradient / Re-meshing 4.97 10
Total 48.38 100
Design Cycle Timings

RANS ResultsRANS Results
Inlet Guide Vane (IGV) & Rotor
Governing equations:3D incompressible RANS
Initial blade:Perturbed HIREP
sections
Geometric constraint:Fixed chord line
Target pressure distributions:Separate simulations ofHIREP IGV (Rec =
1.8x106) & Rotor (Rec = 4.7x106)
-0.1 0.1 0.3 0.5 0.7 0.9 1.1 1.3ux
0.30.20.10.0
-0.1-0.2-0.3-0.4
Cp

Time Step
Lo
g[R
(p) m
ax
],
Lo
g[R
(p) rm
s]
CL
,C
D
0 250 500 750 1000 1250 1500
-14
-12
-10
-8
-6
-4
-2
0
2
4
0.00
0.10
0.20
0.30
0.40
0.50
MAXRMSCL
CD
IGV RANS
12 min. (24 PIII CPU)
RANS Results – IGVRANS Results – IGVConvergenceConvergence

RANS Results - IGVRANS Results - IGV
IGV Inverse Design(no rotation)
ND = 11025
ND-CYC
I
I rm
s
0 50 100 15010-6
10-5
10-4
10-3
10-2
10-6
10-5
10-4
10-3
10-2
IIrms
IGV RANSviscous* gradient
x / RH
Cp
-0.25 0 0.25
-0.5
0.0
0.5
1.0 targetinitialdesign
TIP
x / RHC
p
-0.25 0 0.25
-0.5
0.0
0.5
1.0
MID-SPAN
x / RH
Cp
-0.25 0 0.25
-0.5
0.0
0.5
1.0
ROOT

RANS Results - IGVRANS Results - IGV
x / RH
y/R
H
-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.00.00
0.05
0.10
ROOT
x / RHy
/RH
-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.00.00
0.05
0.10
targetinitialdesign
MID-SPAN
x / RH
y/R
H
-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0
0.00
0.05
TIP
0.50.40.30.20.10.0
-0.1-0.2-0.3-0.4
Cp
INITIAL
DESIGN
TARGET

RANS Results - RotorRANS Results - Rotor
Rotor Inverse Design(260 RPM)
ND = 11025
ND-CYC
I
I rm
s
0 50 100 15010-6
10-5
10-4
10-3
10-2
10-1
10-6
10-5
10-4
10-3
10-2
10-1
IIrms
ROTOR
x / RH
Cp
-0.25 0 0.25
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
TIP
x / RHC
p
-0.25 0 0.25
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
MID-SPAN
x / RH
Cp
-0.25 0 0.25
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0 targetinitialdesign
ROOT

RANS Results - RotorRANS Results - Rotor
TARGET INITIAL

RANS Results - RotorRANS Results - Rotor
TARGET DESIGN

RANS Results - RotorRANS Results - Rotor
x / RH
y/R
H
-0.8 -0.6 -0.4 -0.2 0.0
0.0
0.1
0.2
0.3
0.4
0.5
0.6
targetinitialdesign
ROOT
x / RH
y/R
H
-0.8 -0.6 -0.4 -0.2 0.0
0.0
0.1
0.2
0.3
0.4
0.5
0.6targetinitialdesign
MID-SPAN
x / RH
y/R
H-0.4 -0.2 0.0
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
targetinitialdesign
TIP
Rotor Blade Section Shape Comparison: ROOT, MID-SPAN, & TIP

RANS Results - SummaryRANS Results - Summary
Sublayer-Resolved MESH
770,721 mesh points
11,025 design variables
Wall Clock
24 CPUs (PIII)
seconds
% of Total
Flow Solution 123.73 48
Adjoint Solution 116.20 46
Gradient / Re-meshing 14.55 6
Total 254.48 (4m 15.5s) 100
Design Cycle Timing

ConclusionConclusion
Established the viability of the continuous adjoint approach for the shape optimization of propulsors
Demonstrated the minimization the inverse design cost function for an incompressible axial flow pump
Demonstrated using high-fidelity flow modeling: 3D Euler, 312K mesh 3D RANS, 770K mesh
Demonstrated using large design space ND = 6,321 – 11,025
Demonstrated the cost effectiveness: 3D RANS, 11K d.v. <4.5 min./cycle on 24 PIII
CPUs



![[site] exploration alyssa, rudi, ray, arron](https://img.dokumen.tips/doc/110x75/579076541a28ab6874b8c0f1/site-exploration-alyssa-rudi-ray-arron.jpg)

























