Embed Size (px)
Citation preview

Application of asymptotic expansions for maximum likelihood estimators’ errors to gravitationalwaves from inspiraling binary systems: The network case
Salvatore Vitale1,2 and Michele Zanolin1
1Embry-Riddle Aeronautical University, 3700 Willow Creek Road, Prescott, Arizona 86301, USA2Nikhef, Science Park 105, 1098XG Amsterdam, The Netherlands
(Received 23 August 2011; published 8 November 2011)
This paper describes the most accurate analytical frequentist assessment to date of the uncertainties in the
estimation of physical parameters from gravitational waves generated by nonspinning binary systems and
Earth-based networks of laser interferometers. The paper quantifies how the accuracy in estimating the
intrinsic parameters mostly depends on the network signal to noise ratio (SNR), but the resolution in the
direction of arrival also strongly depends on the network geometry. We compare results for six different
existing and possible global networks and two different choices of the parameter space. We show how the
fraction of the sky where the one sigma angular resolution is below 2 square degrees increases about 3 times
when transitioning from the Hanford (USA), Livingston (USA) and Cascina (Italy) network to a network
made of five interferometers (while keeping the network SNR fixed). The technique adopted here is an
asymptotic expansion of the uncertainties in inverse powers of the SNR where the first order is the inverse
Fisher information matrix. We show that the commonly employed approach of using a simplified parameter
spaces and only the Fisher information matrix can largely underestimate the uncertainties (the combined
effect would lead to a factor 7 for the one sigma sky uncertainty in square degrees at a network SNR of 15).
DOI: 10.1103/PhysRevD.84.104020 PACS numbers: 04.30.Db, 04.80.Cc
I. INTRODUCTION
With the next generation of advanced ground-basedgravitational-wave detectors under construction, we ana-lyze the accuracy in the estimation of physical parametersfrom gravitational waves generated by nonspinning binarysystems. In particular we examine the benefits of proposedextensions of the existing LIGO Virgo detectors networkof Hanford (USA), Livingston (USA) ([1]) and Cascina(Italy) ([2]), to include sites in Australia ([3]), Japan ([4])and India ([5]). The paper covers the role of the network inthe ability (a) to estimate intrinsic physical parameters and(b) localize sources. This second capability will be criticalto aid searches for electromagnetic counterparts to de-tected gravitational-wave signals. The analysis is carriedout with a novel analytical technique developed in [6] andextends existing studies (see, for example [6–11], and thereferences therein) as discussed below. The two previousapplications of this technique by the authors involved asingle optimally oriented interferometer while estimatingphysical parameters (a) from the inspiral phase of thewaveform ([6]) and (b) from the phenomenologicalinspiral-merger-ringdown waveforms generated by blackhole mergers ([7]). In this work we include: (a) the direc-tion of arrival, (b) the orientation of the orbital plane withrespect to the observer, (c) the use of a network of inter-ferometers, and (d) parameter spaces of different sizes.This aspect needs to be addressed carefully since Fisherinformation matrix can become singular (this is also dis-cussed in [10]).
Recent frequentist analytical results addressing thedirection reconstruction, see, for example, [8,9] and the
references therein, limited themselves to quantify the ac-curacy in estimating the direction of arrival by using theinverse of the Fisher information matrix (IFIM) and areduced parameter space (the angles were estimated fromthe times of arrival assuming the intrinsic parametersknown). Other articles used the full parameter space, butrelied on the IFIM to calculate the errors [12,13]. This canbe problematic as we discussed in [6,7] and here. In fact,the IFIM delivers accurate error predictions in large signalto noise ratios (SNRs), however for moderate to low SNRs,where the first detections are likely to be recorded, they cangrossly underestimate the uncertainties. This effect is ex-acerbated when the parameter space is expanded to includeintrinsic parameters. The role of the size of the parameterwas initially discussed for IFIM in [14].In [6,7] we showed how the SNR necessary to trust the
inverse of the Fisher information matrix strongly increaseswhen the parameter space is enlarged to include all theunknown parameters in the problem. We also discussedhow at low SNRs the errors (defined as the square root ofthe sum of the first two orders of the expansion of thecovariance matrix) decrease like 1=SNR2. This is the SNRregion where the inverse of the Fisher information matrixis smaller than higher-order contributions we introducedin [6].In the analysis we observe that increasing the size of the
network from 3 to 5 IFOs can increase by a factor of 3 thefraction of the area that has angular resolution of the orderof 1 or few square degrees. We also notice that the effectsof the size of the parameter space and the second-ordercorrections on the direction reconstruction can lead to anincrease the uncertainties by about a factor of 5 for a
PHYSICAL REVIEW D 84, 104020 (2011)
1550-7998=2011=84(10)=104020(22) 104020-1 � 2011 American Physical Society

network SNR of about 15. The results of Sec. IV show howthe accuracy in the direction reconstruction strongly in-creases when the network transits from three to four inter-ferometers but less noticeably with further increases. Onthe positive side the details of the analysis show that forregions in the sky where the IFIM predict the smallestuncertainties the impact of the second order and of thesize of the parameter space are reduced.
The asymptotic expansions used in this paper can beused to quantify the variance, the bias or the mean squareerror of the maximum likelihood estimators. When we talkabout ‘‘errors’’ we refer to the square root of the meansquare error which is identical to the square root of thevariance (or the diagonal elements of the covariance matrixfor multivariate estimates) when the bias is zero ([6]).Notice that what we call bias is not related to errors inthe modeling of the signal or detector, but simply the shiftof the mean value of the estimator with respect to the truevalue of the parameter. The origins of the bias are thenonlinearity of the estimation process and sometimesedge effects (if someone estimates a non-negative parame-ter there is usually a positive bias if the true value is close tozero). The results of evaluating the expansions of the biasin the mass bins considered in this paper show that the biasoriginating from the nonlinearity of the estimation processis not a concern, leaving only edge effect biases, whenapplicable (see [15]). Finally, while the analysis of thispaper is performed within a frequentist framework, a par-allel effort that did not include India and Japan studied theproblem with numerical Bayesian methods ([11]). A directcomparison between the two would require us to under-stand the impact of the prior probability distributions andthe difference in the questions the two approaches actuallytry to answer.
In Sec. II we review the properties of a received signaland the conventions in defining the direction of arrival andthe polarization angle with respect to different referenceframes. The expressions are obtained explicitly becausenone of the many sets of conventions adopted in theliterature produced suitable expressions to be inserted inour asymptotic expansions. In the text we provide a moredetailed discussion of these issues. In Sec. III we extend theformalism developed in [6,7] for a single, optimally ori-ented interferometer, to a network of interferometers. InSec. IV we define the waveform and the parameter space.In Sec. V we describe the results. In the appendixes weprovide some conclusions, recommendations, supportingproofs, and mathematical expressions.
II. THE SIGNAL ON AN EARTH-BASEDNETWORK OF DETECTORS
A. Frames and conventions
In order to calculate the form of a gravitational-wavesignal in each detector of a network, it is useful to considerseveral coordinate frames, as some aspects of the problem
may become more clear in one frame than in another. Inparticular we shall find useful to work in the followingframes:(i) Wave frame (WF). It has coordinates ðX; Y; ZÞ. The
GW travels along the positive Z axis; X and Y lie inthe directions of the polarization ellipse’s axes.
(ii) Earth frame (EF). It has coordinates ðxE; yE; zEÞ.The origin is on the center of the Earth, the xEaxis lies in the line joining the center of the Earthwith the intersection between the Equator and theGreenwich meridian; zE passes through the NorthPole.
(iii) I-th-Detector frame (IDF). It has coordinatesðxI; yI; zIÞ. The axes xI and yI lie along the twoarms, nI
1 and nI2 respectively. zI points radially out
from the Earth surface.(iv) Fiducial frame (FF). For the moment is a generic
frame with respect to whom the positions of thedetectors will be specified. Later in the section weidentify the fide with the Earth frame. Henceforthwe will refer to it as the ‘‘fide’’ frame.
We introduce two sets of Euler angles: the first onetransforms the fide frame into the wave frame, the secondtransforms the fide frame into the I-th detector frame:
ð�; �; c Þ; FF ! WF (2.1)
ð�I; �I; �IÞ; FF ! IDF (2.2)
Following Goldstein ([16]), and a big part of the litera-ture, we perform the second rotation around the interme-diary x axis (ZXZ convention)
Rð�; �; c Þ � Rzðc ÞRxð�ÞRzð�Þ: (2.3)
It must be underlined how the Euler angles � and � arenot to be identified with the spherical coordinates of thegravitational-wave source in the fide frame.If one calls � and � the spherical coordinates of the
source in the fide frame,� and � the angles that the wave’sdirection of propagation forms with the fide axes, thefollowing relations hold:
� ¼ �� �
2¼ �þ �
2� ¼ ��� ¼ �: (2.4)
these relations, in terms of the latitude (lat) and longitude(long.) of the source in the fide frame, become
� ¼ long� �
2¼ �þ �
2� ¼ �
2þ lat ¼ �: (2.5)
One can find similar relations between longitude�I andlatitude �I of the I-th detector beam splitter and the Eulerangles �I, �I. The third Euler angle, �I, can be fixednoticing that after the second rotation the intermediateframe will have its x axis along the local parallel, pointingEast, and the y axis along the local meridian, pointingNorth. The third Euler’s rotation must align the axes withthe arms. We label the arms in such a way that the first arm
SALVATORE VITALE AND MICHELE ZANOLIN PHYSICAL REVIEW D 84, 104020 (2011)
104020-2

has only the x component, while the second has only the ycomponent. If we call �I the angle between the first armand the local North direction, then
�I ¼ �I þ �
2; �I ¼ �
2��I; �I ¼ �I þ �
2:
(2.6)
The local Earth radius at the position of the I-th detec-tor’s beam splitter is indicated with rI.
In the following sections, necessary different usages ofindexes are introduced as below:
(1) Tensor indexes. Lower case Latin letter, usuallyði; j; k; . . .Þ, will indicate the components of tensorswhen the range is 1 � � � 3 (Greek letter if the range is0 � � � 3). The Einstein convention for these indexesis always used, unless the contrary is explicitlystated.
(2) When a quantity refers to the I-th interferometer, weadd I on the upper right side of the symbol, e.g., dI.
(3) When we calculate explicitly the components of avector or tensor in a particular frame, the framewhere the expression holds is indicated with anindex in the upper left of the symbol; e.g., IDFdI
will be used to give the components of the I-thdetector tensor in the I-th detector frame.
B. Interferometer output
Gravitational waves are ripples in the space-time, thatcan be represented as fluctuations h� around the back-
ground flat metric. In the transverse-traceless (TT) frame([17,18]) the only nonvanishing components of h�, if the
wave is traveling in the positive Z direction, are hXX ¼�hYY � hþ and hXY ¼ hYX � h�,
1 where hþ and h� arethe two independent polarizations.
While dealing with gravitational waves, it is useful tointroduce a 3� 3 wave tensor, defined as one-half of thespatial part of the metric perturbation
wij � 1
2hij i; j ¼ 1 � � � 3:
In an arbitrary frame, the wave tensor can be expressedin terms of its circular polarization components ([21])
wijðtÞ ¼ 1
2½ðhþðtÞ þ ih�ðtÞÞeijR þ ðhþðtÞ � ih�ðtÞÞeijL �;
(2.7)
where eijR;L are the right and left circular polarization
tensors unity. They are orthonormal one with respect tothe other
eijRe�R ij ¼ 1; eijRe
�L ij ¼ 0; eijLe
�L ij ¼ 1: (2.8)
Since the components of the wave tensor are real
eijR ¼ eij �L : (2.9)
In any reference frame, the polarization tensors can beexpressed as
eijL ¼ mimj; (2.10)
where mi are the components of the null vector
mi ¼ 1ffiffiffi2
p ðeiX þ ieiYÞ (2.11)
with eX and eY unit vectors along the WF axes. Using (2.9)and (2.10), the wave tensor (2.7) can be written in analternative way, that will be useful later
wijðtÞ ¼ hþðtÞ<½mimj� þ h�ðtÞ=½mimj�: (2.12)
In the wave the null vector m has the simple form
WFmi ¼ 1ffiffiffi2
p ð1; i; 0Þ (2.13)
and the wave tensor has the explicit expression
WFw ¼ 1
2
hþ h� 0h� �hþ 00 0 0
0@
1A: (2.14)
The form of the wave tensor in another frame is easilycalculated expressing the components of the null vector min that frame and using Eq. (2.12). The GW signal at theI-th detector can be written as
sIðtÞ ¼ wij½t� Ið�I; �IÞ�dIij; (2.15)
where dIij is the I-th detector tensor ([22]). For detectors
with orthogonal arms, like those we consider in this work,d has the form
dIij ¼ nI1 inI1 j � nI2 in
I2 j: (2.16)
nI1 and n
I2 are the unit vector along the I-th interferometer
arms.In Eq. (2.15), the wave tensor is evaluated at the retarded
time t� I that takes into account the time the GW needsto travel from the I-th detector site to the fide frame
I � tIDF � tFF ¼ n � ðrI � rFÞc
: (2.17)
In the previous equation, rI and rF are the positions ofthe I-th detector’s beam splitter and the fide frame origin inan arbitrary frame, while n is a unit vector in the directionof the wave propagation, i.e., on the Z axis. The time shiftis a scalar, and can be calculated in any frame. However,the calculations are simpler in the fide frame, where rF ¼ 0and
1Some authors, notably [19,20], put an explicit imaginary unitin the cross polarization, then writing hXY ¼ hYX � ih�
APPLICATION OF ASYMPTOTIC EXPANSIONS FOR . . . PHYSICAL REVIEW D 84, 104020 (2011)
104020-3

FFnð�; �Þ ¼ ðsin� cos�; sin� sin�; cos�ÞFFrIðrI;�I;�IÞ ¼ rIðcos�I cos�I; sin�I cos�I; sin�IÞ
(2.18)
(the relations between these angles and Euler’s were givenbefore, Eqs. (2.4) and (2.6)).
From Eq. (2.16) it follows that each detector tensor, dI,has a very simple expression in its own frame
IDFdI ¼1 0 00 �1 00 0 0
0@
1A: (2.19)
If we introduce the null vector
� I �ffiffiffi1
2
sðexI
þ ieyIÞ; (2.20)
where exIand eyI are the unit vectors along the IDF axes,
then the detector tensor can be written in any frame as
dIij ¼ 2<½�Ii�
Ij� (2.21)
just expressing the components of �I in the frame ofinterest.
The signal (2.15) can be calculated explicitly in anyframe. Being an invariant, the final result will be thesame, but the calculations can be somehow simpler in aparticular frame.
Let us consider the wave frame, for example, in whichthe wave tensor has the simple form (2.14). We need towrite the signal at the I-th detector in the WF, which can bedone calculating the components of the null vector �I inthe WF
WF�Iij ¼ Rð�; �; c ÞipR�1ð�I; �I; �IÞpqIDF�I
qj
and using Eq. (2.21). The signal acquires the form
sIðtÞ ¼ hþðt� IÞ<½WF�11WF�11 � WF�22
WF�22�þ 2h�ðt� IÞ<½WF�12
WF�12�: (2.22)
We do not derive here the explicit value, as it is rathercumbersome.
Given the general formula (2.22) we can recover thesingle-detector result in the following way: suppose theI-th detector is the only one present, so that we can identifyits frame with the fide frame. This implies that the anglesð�I; �I; �IÞ and the time delay I are zero, and that thematrix R�1ð�I; �I; �IÞ is the identity matrix. With somesimple algebra is possible to show that in this case thesignal (2.22) can be written as follows:
sðtÞ ¼ hþðtÞFþ þ h�ðtÞF�; (2.23)
where the antenna pattern have the following explicitexpressions in terms of the Euler angles:
Fþ ¼ 1
2ðcos2�þ 1Þ cos2� cos2c � cos� sin2� sin2c
(2.24)
F� ¼ � 1
2ðcos2�þ 1Þ cos2� sin2c � cos� sin2� cos2c :
(2.25)
The expressions obtained are not immediately compa-rable with any other present in the literature, due to themany different conventions used in the years. Let us justcompare our result with some notable articles. Our antennapatterns become those of [22] if we express them in termsof � and � (Eq. (2.4)), because [22] writes them as func-tions of the angles between the propagation vector and thefide axes. In the same way, it is easy to verify that writingthem in terms of the spherical coordinates of the source inthe Earth Frame, ð�;�Þ, one recovers the values found in[23,24]. More attention is required in order to compare ourresult with those in [19,20]: in these articles the x axis isnot along one of the detector’s arms, but instead it bisectsthe arms. This introduce a �=4 shift in the definition of thefirst Euler’s angle. But there is more: in the cited paper thefirst arm is in the positive xy quadrant, while the secondarm has a negative y component. This means that a relabeln1 $ n2 of the arms is also required. This operationchanges the sign of the detector tensor, and then of theantenna patterns. Multiplying Eqs. (2.24) and (2.25) by�1,and adding a�=4 to� one proves that our antenna patternsare equal to those in the references (an extra imaginary unitmust be added in the cross polarization; see Footnote 1 atthe beginning of this subsection).
C. Expansion on a symmetric-trace-free base
In [19–21,25,26], the problem of the signal form at thedetector is treated in an elegant way, recognizing that boththe detector and the wave tensors are symmetric and trace-free (STF) tensors, and can be developed in a base of STFtensors.We have seen that the wave tensor can be expressed in
any frame in terms of the real and imaginary part of thematrix m �m, (the matrix whose ði; jÞ element is mimj).
In the wave frame m has the components given inEq. (2.13), while in a different frame, say the FF, whichcan be obtained from the WF with rigid rotation, its com-ponents will depend on the Euler angles that describe therotation. More precisely, it can be shown that the real andthe imaginary parts of the matrix m �m in the FF are
FF<½mimj� ¼ffiffiffiffiffiffiffi2�
15
s½T2nð�; �; c Þ þ T�2nð�; �; c Þ�Yn
ij
(2.26)
FF=½mimj� ¼ �i
ffiffiffiffiffiffiffi2�
15
s½T2nð�; �; c Þ � T�2nð�; �; c Þ�Yn
ij;
(2.27)
SALVATORE VITALE AND MICHELE ZANOLIN PHYSICAL REVIEW D 84, 104020 (2011)
104020-4

where the functions Tmn are the second-order Gel’fandfunctions, and Yn
ij are a base for rank 2 STF tensors.
Both these quantities, together with some useful mathe-matical background, will be discussed in Appendix A.
As told before, both the wave tensor and the I-th detectortensor are STF, and can thus be written in terms of theGel’fand functions, using (2.12), (2.21), (2.26), and (2.27)with the appropriate rotation angles.
Let us calculate, for example, the signal in the waveframe, where the wave tensor is (2.14) and the I-th detectortensor has the form
WFdIij ¼ 2<½�II�
Ij�
¼ 2
ffiffiffiffiffiffiffi2�
15
s½T2nðWF ! IDFÞ þ T�2nðWF ! IDFÞ�Yn
ij
� 2
ffiffiffiffiffiffiffi2�
15
s�nYn
ij; (2.28)
where we have indicated with the syntax FðWF ! IDFÞthe fact that the function F depends on the Euler angles thatrotate WF into IDF, and where we have introduced thecombination
�n � T2nðWF ! IDFÞ þ T�2nðWF ! IDFÞ: (2.29)
Using the symmetry (A28) of the Gel’fand functions, itis simple to verify that
��n ¼ ��n: (2.30)
This allows us to write the detector tensor in the WF inthe simpler form
WFdij ¼<½�2� �=½�2� 0
�=½�2� �<½�2� 0
0 0 0
0BB@
1CCA: (2.31)
Multiplying (2.14) by (2.31) the signal at the I-th detec-tor takes the form
sIðtÞ ¼ hþ<½�2� � h�=½�2� ¼ <½h�2� (2.32)
with h � hþ þ ih�.This expression looks beautifully compact, but it is not
very useful for real calculations. Let us write down theexplicit value of �2 in terms of Gel’fand functions:
�2 ¼ T22ðWF ! IDFÞ þ T�22ðWF ! IDFÞ¼ T2sðFF ! IDFÞTs2ðWF ! FFÞ
þ T�2sðFF ! IDFÞTs2ðWF ! FFÞ¼ Ts2ðWF ! FFÞ½T2sð�I; �I; �IÞ þ T�2sð�I; �I; �IÞ�¼ T�
2sð�; �; c Þ½T2sð�I; �I; �IÞ þ T�2sð�I; �I; �IÞ�;(2.33)
where we have used the addition formula (A31) forGel’fand functions, while passing from first to second
line, and the relation (A29) in the last line, to write theGel’fand functions associated with the inverse rotationFF ! WF.The real and imaginary parts of �2 can be then written
F Iþ � <½�2�¼ 1
2ðT2sð�I; �I; �IÞ þ T�2sð�I; �I; �IÞÞðT�
2sð�; �; c Þþ T��2sð�; �; c ÞÞ (2.34)
F I� � �=½�2�¼ i
2ðT2sð�I; �I; �IÞ þ T�2sð�I; �I; �IÞÞðT�
2sð�; �; c Þ� T�
�2sð�; �; c ÞÞ; (2.35)
where we have introduced the generalized antenna patternFþ and F�, using which the signal at the I-th detectorlooks formally as in the single-detector case:
sIðtÞ ¼ hþðt� IÞFþ þ h�ðt� IÞF� (2.36)
We will not develop these expressions, because of theirsize. Instead we can check that the generalized antennapatterns have the single-IFO limit values (2.24) and (2.25)when a single detector is present in the Network; this isdone in Appendix B. The expression we have obtained hereis compatible with [21] once the differences in the defini-tions of the detector frames are taken into account, whichresults in a �=4 shift in the definition of �I.
III. FISHER MATRIX, CRLB ANDHIGHER ORDERS
Wewrite the output of the I-th detector as the sum of thesignal sIðtÞ and the noise nIðtÞ
xIðtÞ ¼ sIðtÞ þ nIðtÞ: (3.1)
The signal sI will generally depend on a vector ofunknown parameters # which we want to estimate, thatcan be the physical parameters of the source (e.g., totalmass) as well as extrinsic parameters as the position on thesky (see Sec. IVA). However, here and in what follows, tounburden the expressions, we do not write explicitly thisdependence, as well as the dependence on the time delayI, by using the notation
sIðtÞ � sIðt� I;#Þ: (3.2)
If we assume that the noise in each detector is stationaryand Gaussian with zero mean, the probability distributionfor the data realization in the I-th interferometer is given by
pðxIÞ / exp
��Z
dtdt0ðxIðtÞ � sIðtÞÞ�Iðt� t0ÞðxIðt0Þ
� sIðt0ÞÞ�; (3.3)
where �Iðt� t1Þ is the inverse of the noise correlationmatrix for the I-th detector. The noise from laser interfer-
APPLICATION OF ASYMPTOTIC EXPANSIONS FOR . . . PHYSICAL REVIEW D 84, 104020 (2011)
104020-5

ometers is usually a combination of smaller Gaussianfluctuations and larger, rarer non-Gaussian outliers(‘‘glitches’’ in the data). The use of coincident require-ments between different sites and a whole set of dataquality and vetoes procedures make reasonable the as-sumption that glitches will be recognized and removed orvetoed from the data, leaving only Gaussian distortions tothe GW signal. We also assume that the noise in differentIFOs is statistically independent. In this case the jointprobability distribution is simply the product of (3.3) forI ¼ 1 . . .N
PðxÞ ¼ YNI¼1
pðxIÞ (3.4)
and the log-likelihood turns out to be the sum of the log-likelihood of the detectors
ln½PðxÞ� � ‘ ¼ XNI¼1
ln½pðxIÞ� ¼ XNI¼1
‘I: (3.5)
The additivity will hold for functions that are built from(3.5) through linear operations. This is true, in particular,for the Fisher information matrix defined as
�ij ¼ �E½‘ij� ¼ �XNI¼1
EI½‘Iij� ¼XNI¼1
�Iij; (3.6)
where E½�� is the expectation with the joint pdf (3.4), EI½��is the expectation with the I-th marginal probability andwhere we have defined
‘i���j � @ðnÞ‘@#i � � �@#j : (3.7)
The same notation will be used for the signal derivativeswith respect to the components of the vector of unknownparameters #, e.g., si � @s
@#i .
The single-detector Fisher matrix �Iij can be expressed
in the Fourier domain and it is possible to prove (see, forexample, [6]) that the final expression is
�Iij ¼ 4<
Z fup
flow
dfsIi ðfÞsI�j ðfÞ
SIðfÞ ; (3.8)
where we have introduced the I-th detector one-sided noisespectral density SIðfÞ ([22,27]). The lower cutoff fre-quency, flow is a detector-dependent quantity that we fixwhen the noise models for the detectors are introduced.The upper limit of integration fup, which is waveform-
dependent, indicates up to which frequency we are con-fident that the waveform we use is correct. These limitswill be set later in the section.
Noise-weighted integral like this one, between deriva-tives of the signal will, are denote with wedge brackets
hsa���ijsj���pi � ha � � � ijj � � �pi
¼�
@sðnÞ
@�a � � � @�i�������� @sðmÞ
@�j � � � @�p�
¼ 4<Z fcut
flow
dfsa���is�j���pSðfÞ : (3.9)
The optimal SNR, �I, of the signal at the I-th detectorcan also be written in a similar way ([22])
ð�IÞ2 � 4<Z fup
flow
dfsIðfÞsI�ðfÞ
SIðfÞ ¼ hsðfÞjsðfÞiI: (3.10)
It is intuitive that adding interferometers to our network,while keeping everything else fixed, will increase theamount of information we have on a signal that is present.We can take this into account introducing the network SNR,� defined as
�2 � XNI¼1
ð�IÞ2; (3.11)
which is the SNR we quote in the results section. Once theFisher matrix is calculated, its inverse can be used toestimate errors and covariances.The Cramer Rao lower bound (CRLB) gives a bound for
the variance of the i-th parameter ([28])
ð�#iÞ2 � ½��1�ii � �ii (3.12)
while the covariance between the i-th and the j-th parame-ter is
Cov ð#i; #jÞ � ½��1�ij � �ij: (3.13)
In a high-SNR regime, the errors and covariances areclose to these bounds, and one writes the probability dis-tribution for the errors as a multivariate Gaussian
pð�#Þ / e�ð1=2Þ�#i�#j�ij (3.14)
with i, j ¼ 1 . . .M, M being the dimension of #.On the other hand, the CRLB is known to fail for small
SNRs, that is, for weak signals. In those situations numeri-cal simulations, like MonteCarlo simulations (MC) aremore faithful, but at the price of an high computationalcost. In [6] we proposed an analytical method to improvethe errors estimation for small SNRs, and we used it for a3.5PN signal. In [7] we applied the same method to aninspiral-merger-ringdown ([29–31]), also showing that thebias arising from the nonlinearity of the estimator plays afundamental role for high mass systems.In [6,7] we have shown how the bias and (co)variance of
the estimators can be written as power series in one overthe SNR �
2#i#j ¼
S2ij½1��2
þ S2ij½2��4
þ � � � ¼ 2#i#j½1� þ 2
#i#j½2� þ � � �
(3.15)
SALVATORE VITALE AND MICHELE ZANOLIN PHYSICAL REVIEW D 84, 104020 (2011)
104020-6

b#i ¼ Bi½1��
þ Bi½2��2
þ � � � ¼ b#i½1� þ b#i½2� þ � � � ;(3.16)
where after the first equal sign we have shown explicitlyhow the different terms depend on the SNR. We have also
shown that the first order in the variance series is the usualCRLB, while the second order contains higher derivativesof the signal. Formally, we can still use the expressions wegave there, for example, for the second-order diagonalelements of the covariance matrix:
2#i#i½2� � 2
#i½2� ¼ ��jj þ �jm�jn�pqð2�nq;m;p þ �nmpq þ 3�nq;pm þ 2�nmp;q þ �mpq;nÞþ �jm�jn�pz�qt
�ð�npm þ �n;mpÞð�qzt þ 2�t;zqÞ þ �npq
�5
2�mzt þ 2�m;tz þ �m;t;z
þ �nq;zð6�mpt þ 2�pt;m þ �mp;tÞ
(3.17)
but now both the network Fisher matrix inverse �ij and the� must be calculate using the joint network likelihood.
The second corrections contain the factor
�a1a2...as;...;b1b2...bs ¼ E½‘a1a2...as � � � ‘b1b2...bs�:where now ‘ is the joint log-likelihood, Eq. (3.5). It is easyto check that it is not possible to just add up the single-IFOcontributions, as ‘‘cross terms’’ between different interfer-ometers might appear.
Let us consider, for example,
�ab;cd ¼ E½‘ab‘cd� ¼XNI
XNJ
E½‘Iab‘Jcd�: (3.18)
The terms with I ¼ J will give back the sum of single-IF0 �I
ab;cd, but the terms with I � J also give a contribu-
tion, for example, for the (1–2) term (note the apex at theend of the square brackets to distinguish the contributionsof IFO 1 and IFO 2)
E½‘1ab‘2cd� ¼Z
dtdt0dkdk0dxPðxÞ½sabðt; #Þ�ðt� t0Þðxðt0Þ � sðt0; #ÞÞ � saðt; #Þ�ðt� t0Þsbðt0; #Þ�ð1Þ
� ½scdðs; #Þ�ðk� k0Þðxðk0Þ � sðk0; #ÞÞ � scðk; #Þ�ðk� k0Þsdðk0; #Þ�ð2Þ
¼Z
dtdt0dx1pðx1Þsð1Þa ðt; #Þ�ð1Þðt� t0Þsð1Þb ðt0; #ÞZ
dkdk0dx2pðx2Þsð2Þc ðk; #Þ�ð2Þðk� k0Þsð2Þd ðk0; #Þ¼ �1
ab�2cd: (3.19)
It is then clear that (3.18) can be written as
�ab;cd ¼XNI¼1
�Iab;cd þ
XNI�J
�Iab�
Jcd: (3.20)
Similar calculations give the following results:
�a;b ¼ ��ab ¼ �ab ¼XNI¼1
�Iab (3.21)
�ab;c ¼XNI¼1
�Iab;c (3.22)
�abc;d ¼XNI¼1
�Iabc;d (3.23)
�abc ¼XNI¼1
�Iabc (3.24)
�ab;cd ¼XNI¼1
�Iab;cd þ
XI�J
�Iab�
Jcd (3.25)
�abcd ¼XNI¼1
�Iabcd (3.26)
�ab;c;d ¼XNI¼1
�Iab;c;d �
XI�J
�Iab�
Jcd (3.27)
�abc;de ¼XNI¼1
�Iabc;de �
XI�J
�Idev
Jabc (3.28)
�abcd;e ¼XNI¼1
�Iabcd;e (3.29)
�abc;d;e ¼XNI¼1
�Iabc;d;e þ
XI�J
�Iabc�
Jde (3.30)
APPLICATION OF ASYMPTOTIC EXPANSIONS FOR . . . PHYSICAL REVIEW D 84, 104020 (2011)
104020-7

�ab;cd;e ¼XNI¼1
�Iab;cd;e �
XI�J
ð�Iab;e�
Jcd þ �I
cd;e�JabÞ (3.31)
�abcde ¼XNI¼1
�Iabcde; (3.32)
where the single-detector �If�g have the values given in [7],
that we report in Appendix IV.The � in which cross terms are present can be further
simplified. Let us consider again �ab;cd
�ab;cd ¼XNI¼1
�Iab;cd þ
XI�J
�Iab�
Jcd: (3.33)
The single-detector �Iab;cd has the value:
�Iab;cd ¼ hsab; scdiI þ �I
ab�Icd; (3.34)
so that Eq. (3.33) can be expressed as
�ab;cd ¼XNI¼1
hsab; scdiI þXNI¼1
�Iab�
Icd þ
XI�J
�Iab�
Jcd: (3.35)
It is nearly evident that
XNI¼1
�Iab�
Icd þ
XI�J
�Iab�
Jcd ¼ �ab�cd;
which implies that only the network Fisher informationappears in the final form
�ab;cd ¼XNI¼1
hsab; scdiI þ �ab�cd: (3.36)
The same kind of calculations show that no cross termsare present in any of the �, whose final form is
�a;b ¼ ��ab ¼ �ab ¼XNI¼1
�Iab (3.37)
�ab;c ¼XNI¼1
�Iab;c (3.38)
�abc;d ¼XNI¼1
�Iabc;d (3.39)
�abc ¼XNI¼1
�Iabc (3.40)
�ab;cd ¼XNI¼1
hsab; scdiI þ �ab�cd (3.41)
�abcd ¼XNI¼1
�Iabcd (3.42)
�ab;c;d ¼ ��ab�cd (3.43)
�abc;de ¼XNI¼1
hsabc; sdeiI � vabc�de (3.44)
�abcd;e ¼XNI¼1
�Iabcd;e (3.45)
�abc;d;e ¼ vabc�de (3.46)
�ab;cd;e ¼ ��abvcd;e � �cdvab;e (3.47)
�abcde ¼XNI¼1
�Iabcde: (3.48)
The fact that we have been able to prove that the �’sexplicitly contain the network Fisher matrix is important,as it allows us to obtain simplified expressions for the first-order variance and bias
2#r½1� ¼ �rr (3.49)
b#r½1� ¼ 1
2�ra�bcð�abc þ 2�c;abÞ: (3.50)
The second-order variance is
2#j½2�¼�jm�jn�pq
��nmpqþ3
XNI¼1
hsnq;spmiIþ2�nmp;q
þ�mpq;n
þ�jm�jn�pz�qt
�vnpmvqztþ5
2vnpqvmzt
þ2vqz;nvmtpþ2vqp;zvnmtþ6vmqpvnt;z
þvpqzvnt;mþ2vmq;zvpt;nþ2vpt;zvmq;n
þvmz;tvnq;p
(3.51)
and the second-order bias and covariance matrix, that weshow in Appendix C.
IV. RESULTS
A. Gravitational waveforms
In this paper we analyze the errors in the estimation ofthe physical parameters of GW signals generated by theinspiral phase of binary systems whose components are notrapidly spinning. We assume that when the frequency ofsignal enters in the bandwidth of the advanced detectors,these systems have already lost their orbit eccentricity. Inthis case the plus and cross polarizations are ([17,22])
hðtÞþ ¼ AðtÞ 1þ cos2�
2cos�ðtÞ (4.1)
hðtÞ� ¼ AðtÞ cos� sin�ðtÞ; (4.2)
SALVATORE VITALE AND MICHELE ZANOLIN PHYSICAL REVIEW D 84, 104020 (2011)
104020-8

where AðtÞ is a time-dependent amplitude, �ðtÞ is thephase. Both these quantities can be calculated with a higherdegree of precision within the frame of the Post-Newtoniantheory ([34,35]). The angle � is defined later in the text.The signal (2.36) can be, in this case, written in the form
sIðtÞ ¼ �IAðt� IÞ cosð�ðt� IÞ ��I0Þ; (4.3)
where
�I �ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�1þ cos2�
2F Iþ
2 þ ðcos�F I�Þ2
s(4.4)
�I0 � arctan
2 cos�F I�ð1þ cos2�ÞF Iþ
(4.5)
with F Iþ and F I� defined in Eqs. (2.34) and (2.35). TheFourier transform of the signal (4.3), considering onlypositive frequencies, is
sIðfÞ /Z 1
�1dte�2�itfAðt� IÞðe�ið�ðt�IÞ��I
0Þ
þ eið�ðt�IÞ��I0ÞÞ
¼Z 1
�1dtAðt� IÞe�2�itfþi�ðt�IÞ�i�I
0
¼ e�2�ifI�i�I0
Z 1
�1dTAðTÞe�2�iTfþi�ðTÞ: (4.6)
The integral can be solved using the well-known sta-tionary phase approximation ([14,35]) which consists inexpanding the integrand around its stationary point, wherethe derivative of the phase is zero. This also explains why
we only kept e�ið�ðt�IÞ��I0Þ while going from the first to
the second line: the second term would results in an secondintegral whose integrand would have a phase
ð�2�ft��ðt� Þ þ�0Þ: (4.7)
But the derivative of this expression with respect to thetime is never zero, because the derivative of the orbitalphase �ðtÞ is always positive. This implies that the phaseof this additional addend would be oscillating in the wholerange of integration, making the integral small. The finalresult is then
sIðfÞ ¼ Mð5=6Þ
�ð2=3ÞD
ffiffiffiffiffiffi5�
24
s�f�ð7=6Þeic ðfÞ�2�ifI�i�I
0 ; (4.8)
where the phase is given at the 3.5 PN order by
c ðfÞ ¼ 2�ftc þ�c � �
4þ 3
128�v5
X7k¼0
�kvk (4.9)
and v ¼ ð�MfÞð1=3Þ. The coefficients �i, that depend onthe total and symmetrized mass, can be found in [14,36].
Let us summarize the unknown parameters on which thiswaveform depends:
(i) tc and �c are a reference time (usually the detectiontime, or the coalescence time) and the phase thewave had at that time.
(ii) M ¼ m1 þm2 is the total mass, � ¼ m1m2
ðm1þm2Þ2 is thesymmetric mass ratio. The chirp mass M ¼�ð3=5ÞM is often used instead of the total mass.
(iii) D is the luminosity distance of the system.(iv) c is the polarization angle.(v) � is the angle formed between the line of sight and
the system orbital angular momentum (oftenreferred as iota in the literature). A system with� ¼ 0 is called face-on; one with � ¼ �=2 edge-on. Note that, because of Eq. (4.2), an edge-onsystem only has the plus polarization.
(vi) � and � are the spherical coordinates of thesources in the fide frame. It is worth recalling thatI, � and �0 are functions of those angles anglesthrough (2.17), (2.34), (2.35), (4.4), and (4.5).
This waveform is usually assumed to be accurate till theinnermost stable circular orbit (ISCO) frequency. This willalso be the upper limit of integration in the noise-weightedintegrals like (3.8)
fISCO ¼ fup ¼ ð6ð3=2Þ�MÞ�1: (4.10)
It is known, and easy to verify, that the distance and � arestrongly correlated. From a numerical point of view thismakes the inversion of the Fisher information matrix (3.6)numerically unstable, the determinant being close to zero.This is a known problem ([10]) with explicit or emergingdegeneracies. Numerical issues need to be handled care-fully since the second order of the covariance expansion(3.13) contain the IFIM multiplied by itself up to 4 times.To prevent numerical instabilities, in this paper we con-sider two parameter spaces: one where only the position ofthe source is unknown (mostly to compare our results withexisting literature that adopt this simplification), and # ¼ðta; logM; �; lat; longÞ. We checked that in order to extendthe parameter space further (for example, up to nine pa-rameters) the numerical precision would need to exceed100 digits.
B. Detector locations and noise models
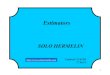
In Table I we report the position of the detectors’beam splitter [37,32,33] with respect to the Earth frame(Eq. (2.2) can be used to convert those in the Euler anglesneeded to calculate the generalized antenna patterns).More details on the existing and planned IFOs can be foundin ([1–5,38–40]).For the advanced Virgo detector we have used the noise
power spectral density plotted in Fig. 1 and given in [7]
APPLICATION OF ASYMPTOTIC EXPANSIONS FOR . . . PHYSICAL REVIEW D 84, 104020 (2011)
104020-9

ShðfÞ ¼ S0½2:67 10�7x�5:6
þ 0:59eðlnxÞ2½�3:2�1:08 lnx�0:13ðlnxÞ2�x�4:1
þ 0:68e�0:73ðlnxÞ2x5:34�; f � flow
ShðfÞ ¼ 1; f flow (4.11)
where x � ff0, f0 ¼ 720 Hz, and S0 ¼ 10�47 Hz�1.
For the advanced LIGO detector, as well as for theprojected new IFOs, we use the following noise powerspectral density, also plotted in Fig. 1
ShðfÞ¼S0
�x�4:14�5x�2þ111
1�x2þx4=2
1þx2=2
; f�flow
ShðfÞ¼1; fflow; (4.12)
where x � ff0, f0 ¼ 215 Hz, and S0 ¼ 10�49 Hz�1.
For both the noise spectral densities, we have chosen thelower frequency cutoff to be flow ¼ 20 Hz.
Obviously the noise for the new detectors need not beexactly like this one, but using the AdvLIGO configuration
is a good approximation for the sensitivities of those newdetectors, and the differences will be very small comparedto the addition of a new IFO to the network.
C. Representative examples and figures of merit
In the frequentist formalism the errors depend on thevalue of the parameters. Therefore it is informative to showwhich kind of errors, calculated using the first two terms ofEq. (3.15), we can expect for different representative sig-nals and different locations in the sky. It is also important tokeep in mind that some situations are intrinsically patho-logical and less interesting: for example, if the latitude is 0or � the longitude is undefined so it is not meaningfulto compute the errors on it (the FIM would actually besingular). In this paper we do not quote results for the bias,Eq. (3.16), as we have shown in [7] that those are importantonly for systems much more massive than the ones weconsider in this work.The plots in this paper refer to the following binary
systems:(i) BNS—Binary neutron star—m1 ¼ m2 ¼ 1:4M(ii) BHNS—Black hole—neutron star—m1 ¼ 10M,
m2 ¼ 1:4M(iii) BBH—Binary black hole—m1 ¼ m2 ¼ 10M
and network configurations:(i) 3 Detectors: HLV(ii) 4 Detectors: HLVJ, HLVA and HLVI(iii) 5 Detectors: HLVJA and HLVJIWhen we calculate the errors, unlike some existing
studies (e.g., [9]), we do not fix the distance of the sourcesto be the same for all the networks. The reason is that suchapproach does not disentangle the role of SNR gains andnetwork geometry (see some related discussion in [11]).Being more interested in the role of the network geometry,for each network and mass bin we set the distance of thesource so that the average network SNR over the sky isabout 15. In particular:(i) 3 Detectors: BNS: 200 Mpc, BHNS: 450 Mpc,
BBH:1100 Mpc(ii) 4 Detectors: BNS: 250 Mpc, BHNS: 550 Mpc,
BBH:1300 Mpc
TABLE I. The positions and orientations of the detector in the Earth frame. The angle � isdefined as the angle between the local North and the first arm of the interferometer measuredcounter clockwise. Equation (2.6) can be used to convert those angles in the Euler angles thattransform the detector frame into the Earth frame.
Detector Label Longitude Latitude �
LIGO, Livingston L 90�46027:300 W 30�33046:400 N 108�00000LIGO, Hanford H 119�24027:600 W 46�27018:500 N 36:8�00000Virgo, Italy V 10�3001600 E 43�3705300 N 341�300000LCGT, Japan J 137�1004800 E 36�1500000 N 295�00000AIGO, Australia A 115�4205100 E 31�2102900 S 270�00000INDIGO, India I 74�0205900 E 19�0504700 S 45�00000
FIG. 1 (color online). Square root of the noise PSD for anAdvanced Ligo detector (continuous line) and an AdvancedVirgo detector (dotted line).
SALVATORE VITALE AND MICHELE ZANOLIN PHYSICAL REVIEW D 84, 104020 (2011)
104020-10

(iii) 5 Detectors: BNS: 280 Mpc, BHNS: 6250 Mpc,BBH:1500 Mpc
Note however how the joint effect of additional IFOs andhigher SNR can be quantified from the results we quote inthis paper. As we provide both ½1� and ½2�, as well as thenetwork SNR, ��, for which they are calculated, one canbuild for any SNR, �, the quantity (which is easily derivedfrom Eq. (3.15))
2ð�Þ ¼ 2½1����
�
2 þ 2½2�
���
�
4; (4.13)
which gives the errors for the desired SNR.In order to study the sky dependence of the angular
resolution we adopt a 289-point sky grid where theði; jÞ-th point has latitude and longitude in the Earth frame.
latij ¼��
2� �
� �þ 2�
16j
longij ¼ ��þ �þ 2�� 2�
16i with
i; j ¼ 0; 1; . . . ; 16; � ¼ 0:02: (4.14)
In each point the Fisher matrix and the second-ordercorrections are evaluated. The small offset � in the range ofthe latitude is added to avoid the poles. The first and lastvalues of the latitude are then �
2 � � and � �2 þ �.
In our simulation we set to representative values of theorientation angle � ¼ �=6 and c ¼ 0. Even if the resultsare almost independent of c the choice of the values of �deserve some discussion. It can be shown, from the deriva-tives of (4.4) and (4.5) with respect to �, that for � ¼ 0derivative of the signal with respect to � is zero and there-fore the Fisher matrix is singular. Similar inversion prob-lems are present for small but nonzero values of �.However, apart from the neighborhood of zero, the resultswould not be qualitatively different choosing differentvalues of �. We explicitly varied �, keeping the otherparameters fixed, and observed only changes in SNR dueto the fact that the cross polarization become less and lessimportant (4.2). By rescaling the distance to compensatefor this loss, the pattern on the errors in the sky map areroughly unchanged. This is also the case with the largernetworks we considered, where the polarization angle can
be partially resolved, and the pattern on the errors in thesky map is pretty much unchanged.In the following we describe how the accuracies in the
estimation of the direction of arrival are be presented. Thecovariance matrix and its second order give us the errors inlatitude, longitude, and their correlation. Assuming that thelikelihood is roughly ellipsoidal the probability distribu-tion of the angular position is a bivariate Gaussian that canbe written as
pð�lat;�longÞ/ e�ð1=2Þð�lat2�lat;latþ�long2�long;longþ2�lat�long�lat;longÞ;
where � is the inverse of the covariance matrix (or FIM ifonly the first order is being taken into account). The con-tours of constant probability are ellipses in the (long, lat)plane. Because of the correlation term, the axes of theellipse are not parallel to the coordinate axes but form anangle �.One can calculate the principal directions of the ellipses
diagonalizing the matrix
�long;long �lat;long
�lat;long �lat;lat
!(4.15)
and finding eigenvalues �1 and �2. It is evident that thewidths of the ellipse along the two eigenvectors are thensimply �i ¼ 1ffiffiffiffi
�i
p , with i ¼ 1, 2. The solid angle corre-
sponding to one of such ellipses, centered around a pointof latitude � can be written as
�� ¼ 2�j cos�j 1ffiffiffiffiffiffiffiffiffiffiffi�1�2
p : (4.16)
Considering the scalar product of the first eigenvector withthe unit vector of the long axis one can find the angle �.These ellipses are then plotted using an Aitoff projection ofthe sky.
D. Bidimensional parameter space
In this section we compute the uncertainties for thelocation of a binary system, while the other parametersare assumed known. The approximation of reducing theparameter space, used, for example, in [8,9,41], unfortu-nately tends to produce optimistic predictions as discussed
TABLE II. First-order, ½1�, and second-order, ½2�, errors averaged over the sky using a three-detector network. Only the skyposition is considered unknown.
BNS BHNS BBH
½1� ½2� ½1� ½2� ½1� ½2�HLV lat [mrad] 7.69 6.18 11.3 6.01 15.3 6.85
long [mrad] 15.1 8.13 20.3 87.92 25.6 8.86
��½deg2� 0.84 2.23a 1.55 2.99a 2.80 4.45a
Net. SNR 16.55 15.37 14.26
aNote: for the solid angle error, the column ½2� takes into account both the first- and second-order errors. The reason is that for thesolid angle error, Eq. (4.16), is not possible to separate the effects of first and second order.
APPLICATION OF ASYMPTOTIC EXPANSIONS FOR . . . PHYSICAL REVIEW D 84, 104020 (2011)
104020-11

in details in the next section. The performance of thedifferent network configurations considered are summa-rized in Tables II, III, and IV.
While the entries that use just the IFIM in Table II andfor the HLVA network in Table III are consistent with theresults in [8,9], columns II, IV, and VI show that in realisticSNR regimes the second order needs to be taken intoaccount. For example, if we include the second order foran average network SNR of 15, the solid angle uncertaintyincreases on average 45%, or more in detail between 37%and 137% with three IFOs, between 10% and 164% withfour IFOs, and between 10% and 153% with five IFOs.
These tables indicate the benefits of enlarging the IFOnetwork however we defer interpretation and discussionsto the next section where intrinsic parameters are alsoestimated at the same time as the direction of arrival.
E. Five-dimensional parameter space
In this section we analyze the errors when a five-dimensional parameter space # ¼ ðta; logM; �; lat; longÞ
is used and discuss in details the benefits of enlarging theHLV network of interferometers. Quantitative results arepresented in Tables V, VI, and VII and in Figs. 2 to 10. Thediscussion that follow is organized in two lines: (a) trendsin the accuracy of the direction reconstruction and estima-tion of intrinsic parameters, and (b) methodology recom-mendations to obtain reliable estimates.(a) It is known that with a three-detector network the
source sky localization is generally not very good, and thatseveral blind spots exist in the projection on the sky of theplane containing the three IFOs. This plane corresponds tothe low-SNR region of Fig. 2.In Fig. 3 we plot the ellipses corresponding to a 95%
confidence interval for the BNS system; the solid ellipsesare obtained using the first-order errors, while the dashedellipses take into account the second order. We have plotteda filled contour of the network SNR in the background ascomparison. It is evident how, even though most of thebiggest ellipses are in low-SNR regions, as one mightexpect, there is no common proportionality between the
TABLE III. Same as Table II, but using four-IFO networks.
BNS BHNS BBH
½1� ½2� ½1� ½2� ½1� ½2�HLVA lat [mrad] 7.96 6.09 10.9 5.02 14.3 5.53
long [mrad] 14.2 7.31 18.1 6.38 21.9 6.82
��½deg2� 0.89 1.65a 1.47 2.11a 2.47 3.19a
Net. SNR 15.7 14.94 14.29
HLVI lat [mrad] 7.24 4.12 9.33 3.30 12.3 3.85
long [mrad] 14.7 6.16 17.6 5.03 21.0 5.65
��½deg2� 0.77 1.06a 1.17 1.36a 1.99 2.23a
Net. SNR 15.4 14.94 14.05
HLVJ lat [mrad] 6.87 5.42 9.09 4.56 11.9 5.00
long [mrad] 13.5 7.39 16.7 6.28 20.4 6.82
��½deg2� 0.75 2.17a 1.18 2.30a 2.02 3.04a
Net. SNR 16.01 15.23 14.57
aNote: for the solid angle error, the column ½2� takes into account both the first- and second-order errors. The reason is that for thesolid angle error, Eq. (4.16), is not possible to separate the effects of first and second order.
TABLE IV. Same as Table II, but using five-IFO networks.
BNS BHNS BBH
½1� ½2� ½1� ½2� ½1� ½2�HLVJI lat [mrad] 6.44 3.46 7.97 2.66 10.7 3.31
long [mrad] 12.9 4.86 15.1 4.08 18.5 4.86
��½deg2� 0.65 0.85a 0.94 1.05a 1.67 1.84a
Net. SNR 15.92 14.97 14.06
HLVJA lat [mrad] 6.76 4.54 8.72 3.53 11.7 4.24
long [mrad] 13.1 6.04 16.0 4.96 19.7 5.80
��½deg2� 0.71 1.12a 1.08 1.36a 1.92 2.29a
Net. SNR 16.18 15.18 14.28
aNote: for the solid angle error, the column ½2� takes into account both the first- and second-order errors. The reason is that for thesolid angle error, Eq. (4.16), is not possible to separate the effects of first and second order.
SALVATORE VITALE AND MICHELE ZANOLIN PHYSICAL REVIEW D 84, 104020 (2011)
104020-12

two, and the contribution of the second order to the skylocalization can be big for regions with medium SNR (e.g.,long 45 lat 45 S in Fig. 2). We return to this point later inthe section. In Table V we report the errors, averaged overthe whole sky, for the three binary system considered here,when detected with the HLV network.
The sky-average accuracy, at an average network SNRof about 15, averaged between the three mass bins that weconsider here, is 3.2 square degrees for HLV when only thetwo-dimensional parameter space is assumed. However forthe same network and the five-dimensional parameterspace this number rises to 21.6 square degrees.
Increasing the size of the network to four IFOs improvesthe situation substantially with these two numbers becom-ing 2.1 and 9.0 square degrees (AIGO is the best additionwith 5.5 square degree for the five-dimensional parameterspace). Finally if the network includes five interferometersthese uncertainties would decrease to 1.4 and 3.5 squaredegrees.It is also important to notice that the angular resolution is
not homogeneous in the sky (especially with the HLVnetwork). and that the role of the second order in theexpansions is usually milder in the locations where theaccuracy is of the order of a degree.
TABLE VI. Same as Table V but using four-IFO networks.
BNS BHNS BBH
½1� ½2� ½1� ½2� ½1� ½2�HLVA M [%] 4.56e-3 2.92e-3 2.79e-2 1.86e-2 0.21 0.15
� [%] 0.22 0.14 0.38 0.22 1.58 0.99
ta [ms] 0.11 0.11 0.17 0.12 0.36 0.24
lat [mrad] 9.58 9.51 13.5 9.78 17.8 10.1
long [mrad] 39.0 40.0 46.6 31.7 61.3 41.5
��½deg2� 1.34 4.22a 2.32 5.11a 4.01 7.20a
Net. SNR 15.7 14.9 14.29
HLVI M [%] 4.63e-3 3.00e-3 2.81e-2 1.88e-2 0.21 0.15
� [%] 0.23 0.16 0.39 0.23 1.61 1.03
ta [ms] 0.17 0.17 0.27 0.18 0.47 0.31
lat [mrad] 14.6 15.3 20.4 14.1 26.3 15.0
long [mrad] 46.0 48.3 51.2 34.6 66.9 47.4
��½deg2� 1.85 9.57a 3.09 8.50a 5.27 10.12a
Net. SNR 15.4 14.7 14.05
HLVJ M [%] 4.39e-3 2.64e-3 2.67e-2 1.68e-2 0.20 0.13
� [%] 0.21 0.13 0.37 0.20 1.50 0.89
ta [ms] 0.17 0.15 0.26 0.17 0.44 0.27
lat [mrad] 13.6 16.3 19.5 16.1 25.0 17.0
long [mrad] 37.4 39.3 44.9 31.7 58.8 40.7
��½deg2� 1.98 13.39a 3.49 10.29a 5.94 12.68a
Net. SNR 16.01 15.23 14.57
aNote: for the solid angle error, the column ½2� takes into account both the first- and second-order errors. The reason is that for thesolid angle error, Eq. (4.16), is not possible to separate the effects of first and second order.
TABLE V. First-order, ½1�, and second-order, ½2�, errors averaged over the sky using a threedetector network and a five-dimensional parameter space.
BNS BHNS BBH
½1� ½2� ½1� ½2� ½1� ½2�HLV M [%] 4.31e-3 2.58e-3 2.66e-2 1.68e-2 0.21 0.14
� [%] 0.22 0.14 0.38 0.21 1.61 1.00
ta [ms] 0.34 0.23 0.46 0.27 0.68 0.39
lat [mrad] 22.5 17.9 28.6 19.7 36.1 22.0
long [mrad] 51.9 46.1 57.0 35.3 76.1 48.7
��½deg2� 4.71 16.4a 9.07 21.5a 15.14 27.09a
Net. SNR 16.55 15.37 14.27
aNote: for the solid angle error, the column ½2� takes into account both the first- and second-order errors. The reason is that for thesolid angle error, Eq. (4.16), is not possible to separate the effects of first and second order.
APPLICATION OF ASYMPTOTIC EXPANSIONS FOR . . . PHYSICAL REVIEW D 84, 104020 (2011)
104020-13

One way to quantify the fraction of the sky that canprovide sufficient directional accuracy for electromagneticfollow-ups is described in Table VIII. For example, we canobserve how the fraction of the sky (averaged over the
three binary signals) where the one sigma angular resolu-tion is below 2 square degrees is 20% for the HLV networkand increases to 62% for the best performing five IFOsnetwork (HLVJA).
TABLE VII. Same as Table V but using five-IFO networks.
BNS BHNS BBH
½1� ½2� ½1� ½2� ½1� ½2�HLVJI M [%] 4.47e-3 2.75e-3 2.75e-2 1.79e-2 0.21 0.15
� [%] 0.21 0.13 0.37 0.21 1.56 0.97
ta [ms] 0.14 0.11 0.22 0.12 0.41 0.26
lat [mrad] 11.6 9.39 15.2 7.68 20.0 9.27
long [mrad] 37.3 35.6 42.5 26.6 56.9 38.8
��½deg2� 1.37 2.60a 2.14 2.93a 3.77 4.88a
Net. SNR 15.93 14.95 14.06
BNS BHNS BBH
½1� ½2� ½1� ½2� ½1� ½2�HLVJA M [%] 4.44e-3 2.74e-3 2.74e-2 1.79e-2 0.21 0.15
� [%] 0.21 0.14 0.37 0.21 1.55 0.96
ta [ms] 0.11 0.10 0.17 0.10 0.35 0.23
lat [mrad] 8.19 7.47 11.2 7.32 15.0 8.51
long [mrad] 37.1 38.2 44.0 29.2 58.6 39.9
��½deg2� 1.02 2.78a 1.72 3.17a 3.09 4.86a
Net. SNR 16.18 15.18 14.29
aNote: for the solid angle error, the column ½2� takes into account both the first- and second-order errors. The reason is that for thesolid angle error, Eq. (4.16), is not possible to separate the effects of first and second order.
FIG. 2. Network SNR with an HLV network for a BNS systemat 200 Mpc of distance.
FIG. 3. Skymap of the errors for a BNS signal detected in HLV.The network SNR is plotted in the background and its value isshown in the color bar.
FIG. 4. Skymap for a BNS signal detected in HLVA. The erroron the arrival time is plotted in the background and its value isshown in the color bar (in ms).
FIG. 5. Skymap for a BNS signal detected in HLVI. The erroron the arrival time is plotted in the background and its value isshown in the color bar (in ms).
SALVATORE VITALE AND MICHELE ZANOLIN PHYSICAL REVIEW D 84, 104020 (2011)
104020-14

Comparing the results of the four site networks, sum-marized in Table VI, with the three-IFO network, Table V,it is evident that there are not substantial improvements inthe estimation of the intrinsic parameters, chirp mass and�, while the errors in the estimation of the arrival time, andsky position are dramatically lower.
Looking at the plots we can also observe that thelow-sky-error regions do not overlap with high-SNR re-gions. The reason is that the direction uncertainties mostlydepend on the geometry of the network and the estimationof the arrival time. In Fig. 4 we plot the error ellipsescorresponding to a BNS signal detected in HLVA, but thistime we put the error on the arrival time (first plus secondorder) as a filled contour background, instead of the networkSNR. The match between large errors in time and position isevident. This also implies that if the exact position andorientation of new detectors is chosen to guarantee thehighest network SNR, on average, it might not need toassure the best performances for sky localization ([42]).This fact is confirmed by Table VI, from which is clearthat HLVJ is the network that guarantees the highest aver-aged SNR, but not the lowest errors for intrinsic parameters.
In Fig. 5 and 6 we show errors on the reconstruction ofthe same source, but using HLVI and HLVJ networks.
Those plots seems to suggest that the HLVA networkallows the best sky localization, which is also the outcome
of Table VI. This is reasonable given that 1) the AIGO siteis the furthest from the HLV IFOs, and 2) the plane con-taining AIGO’s arms would be nearly perpendicular to theHLV plane (providing sensitivity in most of the blind spotsof the HLV network). Note that HLVA is also the networkfor which the second-order contributions for�� are small-est. On average the ratio between ��½1stþ 2nd� and��½1st� is 3.15 for BNS, 2.2 for BHNS, and 1.79 forBBH, using HLVA. The same ratios are, respectively,5.17, 2.76, and 1.92 using HLVI and 6.76, 2.95, and 2.13using HLVJ For the intrinsic parameters, chirp mass and �,
FIG. 10. Skymap for a BNS signal detected in HLVJI. Theerror on the arrival time is plotted in the background and its valueis shown in the color bar (in ms).
FIG. 6. Skymap for a BNS signal detected in HLVJ. The erroron the arrival time is plotted in the background and its value isshown in the color bar (in ms).
FIG. 7. Ratio between the second- and first-order errors for thechirp mass. BNS detected in HLVA. Network SNR in back-ground and color map.
FIG. 8. Ratio between the second- and first-order errors for thelatitude estimation. BNS detected in HLVA. Error in arrival time(ms) in background and color map.
FIG. 9. Skymap for a BNS signal detected in HLVJA. Theerror on the arrival time is plotted in the background and its valueis shown in the color bar (in ms).
APPLICATION OF ASYMPTOTIC EXPANSIONS FOR . . . PHYSICAL REVIEW D 84, 104020 (2011)
104020-15

the second-order contributions are larger were the SNR is
lower; in Fig. 7, for example, we plot the ratio M½2� M½1� in
contours, with the network SNR in the background andcolormap. For the extrinsic parameters, on the other hand,the second-order terms are larger where the error on thefirst-order arrival time were large. This is well shown inFig. 8, where it is visible that the biggest contributions tothe second-order errors in latitude come from regionswhere the arrival time error is large.
The same trends are visible in the two five-detectornetworks we have considered: HLVJA and HLVJI. Theresults are summarize in Table VII. Here again it is visiblehow the intrinsic parameters do not take any advantagefrom the addition of a new IFO to the network, keeping acomparable SNR.
The angular errors quoted in Table VII seem to suggestthat HLVJI is the best fiveIFO network. However one hasto remember that what is given in Table VII is an averageof �� over the 189 sky positions we considered. Thereason why the first- + second-order error ��½1þ 2� isslightly larger for HLVJA is that there are a few spots in thesky (four, corresponding to positions where the time-resolution is poor) with very large sky errors, �60 deg2,that increase the sky average. These spots are clearlyvisible in Fig. 9. Aside from these points, HLVJA is better
performing. That is seen in Table VIII, in which the num-ber of signals with sky error smaller than 1, 2, or 3 squaredegrees are given.It is worth mentioning that this trends in the sky
localization accuracy, while adding IFOs to the network,was investigated with Monte Carlo simulations for burstsignals in [43]. Explicitly it was noted that going from afour-IFO to a five-IFO network, the gain in sky localizationis smaller than going from a three-IFO to a four-IFOnetwork.In this paper we also observe that the increment in
performance depends on which detectors have been added,
and in which order. For example, using only the CRLB and
going from HLV to HLVJ to HLVJA, comparing Tables V,
VI, and VII it can be seen that the first-order ��½1� forBNS systems varies in the following way (in parenthesis,
the variation with respect to HLV):(i) HLV: 4:71 deg2
(ii) HLVJ: 1:98 deg2 (�58%)(iii) HLVJA: 1:02 deg2 (�78%)On the other hand if the order is HLV, HLVA, HLVJAwe
find:(i) HLV: 4:71 deg2
(ii) HLVA: 1:34 deg2 (�72%)(iii) HLVJA: 1:02 deg2 (�78%)
TABLE VIII. Fraction of sources whose confidence levels of 68% (1 standard deviation) or 95% (2 standard deviations) are smallerthan 1, 2 or 3 square degrees, considering only the first-order errors, or the first and second order.
BNS BHNS BBH
1 2 3 1 2 3 1 2 3
HLVJI CL68½1� [%] 49.48 79.24 92.39 18.34 60.55 80.27 0.0 25.60 48.10
CL95½1� [%] 0.0 4.15 32.53 0.0 0.0 6.57 0.0 0.0 0.0
CL68½1þ 2� [%] 21.11 61.59 76.12 5.88 48.10 69.90 0.0 11.07 42.56
CL95½1þ 2� [%] 0.0 0.0 3.46 0.0 0.0 0.0 0.0 0.0 0.0
HLVJA CL68½1� [%] 62.63 96.19 98.61 13.84 69.55 93.77 4.84 21.45 59.86
CL95½1� [%] 0.0 5.89 31.83 0.0 1.38 8.30 0.0 0.0 0.0
CL68½1þ 2� [%] 19.72 64.71 80.28 7.61 52.60 67.47 0.0 10.38 43.94
CL95½1þ 2� [%] 0.0 0.0 3.46 0.0 0.0 3.80 0.0 0.0 0.0
HLVJ CL68½1� [%] 40.83 66.44 80.62 11.76 41.18 57.09 1.73 11.76 35.64
CL95½1� [%] 0.0 5.88 28.72 0.0 0.00 6.92 0.0 0.0 0.0
CL68½1þ 2� [%] 15.22 46.02 57.43 6.92 24.57 40.83 0.0 6.92 22.15
CL95½1þ 2� [%] 0.0 0.0 3.46 0.0 0.0 2.08 0.0 0.0 0.0
HLVA CL68½1� [%] 45.32 87.54 96.54 11.76 59.52 81.66 4.15 11.76 43.25
CL95½1� [%] 0.0 5.54 27.68 0.0 1.38 7.96 0.0 0.0 0.0
CL68½1þ 2� [%] 13.49 56.05 72.32 6.92 33.22 55.36 0.0 7.61 23.86
CL95½1þ 2� [%] 0.0 0.0 4.15 0.0 0.0 4.15 0.0 0.0 0.0
HLVI CL68½1� [%] 22.84 63.32 85.81 5.88 34.60 60.55 0.0 8.30 24.91
CL95½1� [%] 0.0 0.0 5.54 0.0 0.0 0.0 0.0 0.0 0.0
CL68½1þ 2� [%] 0.69 36.33 57.44 0.0 17.65 40.83 0.0 0.69 9.00
CL95½1þ 2� [%] 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
HLV CL68½1� [%] 13.15 42.56 54.32 1.38 11.76 27.68 0.0 4.15 11.76
CL95½1� [%] 0.0 0.0 6.22 0.0 0.0 0.0 0.0 0.0 0.0
CL68½1þ 2� [%] 0.0 25.26 41.18 0.0 9.69 20.07 0.0 0.0 4.15
CL95½1þ 2� [%] 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
SALVATORE VITALE AND MICHELE ZANOLIN PHYSICAL REVIEW D 84, 104020 (2011)
104020-16

The situation is even more clear when the second orderis taken into account. For example, if LCGT is the first IFOto be added to HLV the errors ��½1þ 2� vary as:
(i) HLV: 16:4 deg2
(ii) HLVJ: 13:4 deg2 (�18%)(iii) HLVJA: 2:78 deg2 (�83%)
but if the order is HLV, HLVA, HLVJA we find(i) HLV: 16:4 deg2
(ii) HLVA: 4:22 deg2 (�74%)(iii) HLVJA: 2:78 deg2 (�83%)So that if LCGT is the first IFO to be added to HLV, there
is still another 20% to be gained at the first order, and 65%using first and second order, by adding AIGO (with Indigothe differences are much smaller, to the close position ofLCGT and Indigo on the Earth).
Note also that the total gain going from three to fiveIFOs is not too different using the first-order errors only(�71% with HLVJI and �78% with HLVJA), or the firstand second (�84% with HLVJI and �83% with HLVJA).On Fig. 9 and 10 we plot the sky errors together with theerrors on the arrival time.
(b) The results of this section suggest a word of cautionin reducing the parameter space and relying only on theIFIM.
If someone would use the two-parameter approximationand only the Fisher information matrix, the square degreeuncertainty would be underestimated (on average for theexamples considered in this paper) by a factor of 6.7.
The results of the two-dimensional parameter spacepresented in Tables II, III, and IV) are less relevant in thequantitative discussion of the errors because the angularresolution is 4.5 times smaller than the values in the tablesfor the five-dimensional parameter space presented here.(notice that the increase in the uncertainties with the size ofthe parameter space was already discussed before for asingle-IFO parameter estimation scenario based on theIFIM, e.g., in [14]).
It is also important to use the results including thesecond order of the expansions. Such role, with the five-dimensional parameter is illustrated in the Tables V, VI,and VII. If we include the second order for an averagenetwork SNR of 15, the solid angle uncertainty increaseson average 162%, or between 79% and 248% with 3 IFOs,between 80% and 576% with 4 IFOs and between 29% and173% with 5 IFOs, depending on the network and mass binconsidered.
V. CONCLUSIONS
In this paper we have described the most accurateanalytical frequentist assessment to date of the uncertain-ties in the estimation of physical parameters from gravita-tional waves generated by nonspinning binary systemsdetected by Earth-based networks of laser interferometers.The technique we adopted to quantify the errors is an
asymptotic expansion of the uncertainties in inversepowers of the SNR ratio, where the first order is the inverseFisher information matrix, and it provides results which arebetter suited to describe low-SNR regimes.We have quantified how the accuracy for the intrinsic
parameters depends on the network SNR, while the mea-sure of the direction of arrival also depends on the networkgeometry. We have compared results for six different ex-isting and possible global networks and quantified therelative advantages of different proposed sites. In particu-lar, the fraction of the sky where the one sigma angularresolution is below 2 square degrees is shown to increaseabout 2.3 times when transitioning from the HLV networkto a possible five sites one (keeping the network SNRfixed). Between the proposed four IFOs networks, HLVAguarantees smaller errors on the reconstruction of theposition of the source. On the other hand, the two five-IFO network we considered, HLVJA and HLVJI, seem tohave comparable performances (see Table VIII).
ACKNOWLEDGMENTS
The authors would like to thank P. Ajith and R. Frey foruseful comments on the draft of the paper, Marco Drago foruseful discussions, and the LPTMC laboratory of theUniversity UPMC (France) for the use of computers.S. V. is supported by the research program of theFoundation for Fundamental Research on Matter (FOM),which is partially supported by the NetherlandsOrganization for Scientific Research (NWO). S. V. wouldlike to thank W. Del Pozzo and C. Van Den Broeck foruseful discussions. M. Z. thanks the National ScienceFoundation for the support through Contract Nos.NSF855567 and NSF0919034.
APPENDIX A: SYMMETRIC AND TRACE-FREETENSORS AND GEL’FAND FUNCTIONS
In this appendix we provide some useful expressions andderivations that are used in the text, advising the reader torefer to [44–46] for a complete analysis of the topic. Usefulinformation can also be found in [27].Let us consider a Cartesian frame, call it ‘‘WF,’’ with
coordinates ðx; y; zÞ. We have seen before that the wavetensor can be written
wij ¼ hþ<½mimj� þ h�=½mimj�; (A1)
where m is complex unit vector, whose components in WFare m ¼ 1ffiffi
2p ð1; i; 0Þ.
Obviously
<½mimj� ¼ 1
2ðmimj þm�
i m�j Þ (A2)
=½mimj� ¼ 1
2iðmimj �m�
i m�j Þ (A3)
APPLICATION OF ASYMPTOTIC EXPANSIONS FOR . . . PHYSICAL REVIEW D 84, 104020 (2011)
104020-17

The explicit expression of m �m in the WF is
mimj ¼ 1
2
1 i 0i �1 00 0 0
0@
1A (A4)
while m� �m� is just the complex conjugate. Both thematrices are symmetric and trace-free, and it is then pos-sible to expand them in a base of STF tensor. Given a STFtensor, Q, whose Cartesian coordinates, Qij, are given in
the WF, one can expand it in the STF base as follows:
Qij ¼ QmY2mij ; (A5)
where we use the Einstein convention on the repeatedindexes, withm ¼ 2, 1, 0. The quantitiesQm are calledthe spherical components of Qij.
The base tensors Y2mij can be put in relation with the
usual spherical harmonics Ylmð�; �Þ with l ¼ 2 using thefollowing formula:
Y2mð�; �Þ ¼ Ymijn
inj; (A6)
where ni are the components of the unit radial vector n ¼ðsin� cos�; sin� sin�; cos�Þ. Equation (A7) can be in-verted to find the explicit expressions of the base tensors
Y2 � 1
4
ffiffiffiffiffiffiffi15
2�
s 1 i 0
i �1 0
0 0 0
0BB@
1CCA; Y1 ��1
4
ffiffiffiffiffiffiffi15
2�
s 0 0 1
0 0 i
1 i 0
0BB@
1CCA;
Y0 � 1
2
ffiffiffiffiffiffiffi5
4�
s �1 0 0
0 �1 0
0 0 2
0BB@
1CCA; Y�2 ¼Y2�;
Y�1 ¼�Y1�: (A7)
It is easy to verify that the Ys also satisfy the followingclosure relation
Tr ½YmYn�� ¼ 15
8��mn (A8)
and that they satisfy
Y n� ¼ ð�ÞnY�n; (A9)
which we used already in Eq. (A8) to save space.Equation (A6) can be inverted to find the spherical
components of the tensor Q
Qm ¼ 8�
15QijYm�
ij : (A10)
Formally we can expand m �m and m� �m� in this base
ðm �mÞij ¼ MmYmij (A11)
ðm� �m�Þij ¼ PmYmij: (A12)
Combining Eqs. (A1)–(A3), (A12), and (A13), we get
wij ¼ Ynij
�hþ2
ðMn þ PnÞ þ h�2i
ðMn � PnÞ
(A13)
where the only nonzero components of Mm and Pm are
M2 ¼ P�2 ¼ 2
ffiffiffiffiffiffiffi2�
15
s(A14)
so that one recovers the expected result from (A14)
wij ¼ Y2ij
�hþ2M2 � i
h�2M2
þY�2
ij
�hþ2P�2 þ i
h�2P�2
¼ 1
4ðhþ � ih�Þ
1 i 0
i �1 0
0 0 0
0BB@
1CCA
þ 1
4ðhþ þ ih�Þ
1 �i 0
�i �1 0
0 0 0
0BB@
1CCA
¼ 1
2
hþ h� 0
h� �hþ 0
0 0 0
0BB@
1CCA: (A15)
Let us now introduce a second frame, called EF. We areinterested in the relation between the components of a STFtensor in the frame WF and in EF.We assume that the WF is obtained from the EF with a
rotation, parametrized with Euler angles ð�;�; �Þ. Thefunctional dependence on a set of Euler angle is indicatedeither by writing explicitly the Euler angles or with anarrow pointing from the fix frame to the rotated one. Forexample,
Fð�;�; �Þ (A16)
and
FðEF ! WFÞ (A17)
both indicate a function F depending on the Euler anglesthat rotate EF ro WF.Equation (A1) can still be used, provided that the com-
ponents of m in the EF are used. These are obviouslyrelated with the components in the WF
EFm ¼ R�1ð�;�; �ÞWFm (A18)
where R�1ð�;�; �Þ is the inverse rotation 3� 3 matrix.Moreover, we can expand (m �m) and (m� �m�),
which are still STF:
ðm �mÞij ¼ffiffiffiffiffiffiffi8�
15
sT2mðEF ! WFÞYm
ij (A19)
ðm� �m�Þij ¼ffiffiffiffiffiffiffi8�
15
sT�2mðEF ! WFÞYm
ij; (A20)
SALVATORE VITALE AND MICHELE ZANOLIN PHYSICAL REVIEW D 84, 104020 (2011)
104020-18

where we have used Tab to denote theGel’fand functions ofrank 2, which are nothing else than the spherical compo-nents of (m �m) and (m� �m�) in this rotated frame.We have explicitly written down the dependence of T 2n
on the rotation matrix (i.e., on the angles that parametrizethe rotation).
The previous relations can be inverted, to find the ex-plicit expressions of the Gel’fand functions
T2mðEF ! WFÞ ¼ffiffiffiffiffiffiffi8�
15
sYm�
ij mimj (A21)
T�2mðEF ! WFÞ ¼ffiffiffiffiffiffiffi8�
15
sYm�
ij m�i m
�j : (A22)
Some of the symmetries own by the rank-2 Gel’fandfunctions are easier to prove starting from the most generaldefinition, of the rank l functions
Tlmnð�;�; �Þ � e�im�Pl
mnðcosð�ÞÞe�in�; (A23)
from which the ones we used are obtained putting l ¼ 2(we shall drop out the apex 2, as we only use the rank-2functions so no confusion is possible). In Eq. (A23) wehave introduced the function2:
Plmnð�Þ ¼ Að1��Þ�ððn�mÞ=ð2ÞÞð1þ�Þ�ððnþmÞ=ð2ÞÞ
� dl�n
d�l�n½ð1��Þl�mð1þ�Þlþm�; (A24)
where the numerical coefficient A has the value
A � ð�1Þl�min�m
2lðl�mÞ!
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðl�mÞ!ðlþ nÞ!ðlþmÞ!ðl� nÞ!
s: (A25)
It is easy to check that Plmn has the following
symmetries:
Pl�n�m ¼ Plnm ¼ Pl
mn ¼ ð�1ÞmþnPlmn
� (A26)
that can be used to show that
T�m�n ¼ ð�Þ�m�nT�mn: (A27)
Finally it can be shown ([44]) that there is a very simplerelation between the Gel’fand function associated with arotation R and that associated with the inverse rotation
TmnðR�1Þ ¼ T�1mn ðRÞ ¼ T�
nmðRÞ: (A28)
Using Eq. (A19) and (A20) on Eq. (A1), the wave tensorin the EF can be written
wij¼Ynij
ffiffiffiffiffiffiffi2�
15
sðhþðT2nþT�2nÞþ ih�ðT2n�T�2nÞÞ; (A29)
where it is understood that the T 2n ¼ T 2nðEF ! WFÞ ¼T 2nð�;�; �Þ.One of the advantages of having a STF tensor expanded
in the STF base, other than the geometrical insight, is thatone can take advantage of all the properties of the Gel’fandfunction. In the main text, for example, we need to writethe detector tensor of the I-th IFO (which is also a STFtensor) in the wave frame. We can apply to that tensor thesame manipulations described in this appendix, and obtainan expression containing: T 2nðWF ! IDTÞ where weneed the angles that rotate the wave frame in the I-thdetector frame. If many detectors are present in the net-work, however, it would be better to calculate the positionof source in a common frame [using Eq. (2.4) the Eulerangles can be obtained], which can be the Earth frame. Wecan achieve that result, writing the rotation WF ! IDT interms of the two successive rotationsWF ! EF and EF !IDF. The behavior of the Gel’fand functions over twosuccessive rotations in very simple. Let R1 and R2 be tworotations, then the Gel’fand function associated with R �R2R1 can be obtained from those associated with R1 and R2
as follows:
TmnðR2R1Þ ¼X2s¼�2
TmsðR2ÞTsnðR1Þ; (A30)
which allows us to write
T 2nðWF ! IDTÞ ¼ T 2nðEF ! IDF;WF ! EFÞ
¼ X2s¼�2
T 2sðEF ! IDFÞTsnðWF ! EFÞ:
(A31)
APPENDIX B: PROOF THAT THE GENERALIZEDANTENNA PATTERNS REPRODUCE THE
STANDARD EXPRESSION FOR THE SINGLEINTERFEROMETER
In this appendix we show that the generalized antennapatterns, Eq. (2.34) and Eq. (2.35) do become equal toEq. (2.24) and Eq. (2.25) if a single IFO is present in thenetwork.If our network is composed of the I-th detector only, we
can identify the fide frame with the detector frame, andthen it follows from the definition (2.2) that
�I ¼ �I ¼ �I ¼ 0 (B1)
because now FF � IDF.For the same reason (Eq. (2.17)): I ¼ 0.Let us start from �2, Eq. (2.33), in which we now set
�I ¼ �I ¼ �I ¼ 0
�2 ¼ T�2sð�; �; c ÞðT2sð0; 0; 0Þ þ T�2sð0; 0; 0ÞÞ; (B2)
where �, �, c still indicate the Euler angles that rotate theFF (i.e., the IDF) to the WF, Eq. (2.1). Starting from the
2Note that 1� n ¼ 0 does not imply that the term withinderivative does not give contribution, but only that the derivativeis not to be performed: d0Að�Þ
d�0 � Að�Þ.
APPLICATION OF ASYMPTOTIC EXPANSIONS FOR . . . PHYSICAL REVIEW D 84, 104020 (2011)
104020-19

general definition of the Gel’fand functions, Eq. (A24), is amatter of a few moments proving that
T 2sð0; 0; 0Þ ¼ �s 2;
where, as done before, we dropped out the apex, becausel ¼ 2 in this whole article.
Equation (B2) then becomes
�2 ¼ T�2sð�; �; c Þð�s
2 þ �s�2Þ ¼ T�
22 þ T�2�2: (B3)
Using again the definition of the Gel’fand function iseasy to find the explicit expressions of the two terms above
T�22ð�;�;c Þ ¼ e2ic e2i�P�
22ð�Þ ¼ e2ic e2i�ð1þ cos�Þ2
4
T�2�2ð�;�;c Þ ¼ e2ic e�2i�P�
2�2ð�Þ ¼ e2ic e�2i� ð1� cos�Þ24
that leads to the final expression for �2
�2 ¼�ð1þ cos2�Þ
2cos2c cos2�� cos� sin2c sin2�
þ i
�ð1þ cos2�Þ2
sin2c cos2�þ cos� cos2c sin2�
:
The antenna patterns can be obtained from �2 as shownin the main text
F þ ¼ <½�2� (B4)
F � ¼ �=½�2�; (B5)
from which Eqs. (2.24) and (2.25) follow immediately.
APPENDIX C: SECOND-ORDER NONDIAGONALELEMENTS OF THE COVARIANCE MATRIX AND
SECOND-ORDER BIAS
In this appendix we give the explicit expression of thesecond-order bias and second-order nondiagonal elementsof the covariance matrix, for a network of N IFOs. The � tobe used are the network ones, given in the main text,Eqs. (3.38), (3.39), (3.40), (3.41), (3.42), (3.43), (3.44),(3.45), (3.46), (3.47), (3.48), and (3.49). For the nondiago-nal terms of the covariance matrix we find
2#i#j
½2� ¼ �im�jn�pq
��nmpq þ 3
XNI¼1
hsnqjspmi þ 2�nmp;q þ 1
2�mpq;n þ 1
2�npq;m
þ �im�jn�pz�qt
��npm�qzt þ 5
2�npq�mzt þ �qz;n�mpt þ �qz;m�npt þ 2�qp;z�nmt þ 3�nt;z�mpq þ 3�mt;z�nqp
þ 1
2�mt;n�pqz þ 1
2�nt;m�pqz þ �pt;m�nq;z þ �mq;z�pt;n þ �nq;m�pt;z þ �mq;n�pt;z þ �nq;p�mz;t
: (C1)
It is easy to show, even though somehow lengthy, that the expression we gave in the text for the diagonal elements,Eq. (3.17), follows from this one setting i ¼ j. The second-order bias has the explicit expression
b#m½2� ¼ �ma�bd�ce
8
�vabcde þ 4
XNI¼1
hsacjsbdeiI þ 8XNI¼1
hsdejsabciI þ 4vabce;d
þ �ma�bc�df�eg
4
�ð2vafedvgb;c þ 2vbedfvac;g þ 4vabedvgf;cÞ þ ðvafedvgcb þ 2vabedvgcf þ 2vdbegvacfÞ
þ�2vaed
XNI¼1
hsgbjsfciI þ 4vacf
XNI¼1
hsdgjsebiI þ 4vbed
XNI¼1
hsacjsgfiI þ 2vfcb
XNI¼1
hsagjsediI
þ ð4vafe;gvdb;c þ 4vafe;cvdb;g þ 4vdbe;gvaf;cÞ þ ð2vabe;gvcdf þ 4vdbe;gvacf þ 4vabe;fvcdg þ 2vdge;bvacfÞ
þ�4XNI¼1
hsagjsfciIved;b þ 4XNI¼1
hsedjsfciIvag;b þ 4XNI¼1
hsagjsediIvfc;b
þ �ma�bc�de�fg�ti
8½vadfðvebcvgti þ 2vetcvgbi þ 4vgbevtci þ 8vgbtveci þ 2vebcvgt;i þ 4vetcvgb;i þ 2vgtiveb;c
þ 4vgtcveb;i þ 8vgbtvce;i þ 8vgbtvci;e þ 8vgbevct;i þ 8vctevgb;i þ 4vctivgb;e þ 4vgt;iveb;c þ 4veb;ivgt;c
þ 8vgt;bvic;e þ 8vgt;evic;b þ 4vbetvg;c;iÞ þ vdcið8vbgtvae;f þ 4vbgfvae;t þ 8vae;tvbg;f þ 8vae;fvbg;t
þ 8vaf;bvge;tÞ� (C2)
SALVATORE VITALE AND MICHELE ZANOLIN PHYSICAL REVIEW D 84, 104020 (2011)
104020-20

APPENDIX D: SINGLE-IFO UPSILON
In this appendix we give the explicit form of thesingle-IFO terms that appear in the second-order covari-ance and bias. In this appendix it will be assumed thatall the quantities refer to one of the IFOs in the network,and the apex ðIÞ to unburden the notation is droppedout.
Let us recall that we have defined
ha � � � ijj � � �pi � hsa���ijsj���pi¼�
@s
@�a � � �@�i�������� @s
@�j � � �@�p�
¼ 4<Z fcut
flow
dfsa���is�j���pSðfÞ
and that �ij is the Fisher matrix.
Using this notation, the single-IFO �’s can be written([7])
�a;b ¼ ��ab ¼ �ab ¼ hajbi�ab;c ¼ habjci�abc;d ¼ habcjdi�abc ¼ �habjci � hacjbi � hbcjai
�ab;cd ¼ habjcdi þ hajbihcjdi�abcd ¼ �habjcdi � hacjbdi � hadjbci � habcjdi
� habdjci � hacdjbi � hbcdjai�ab;c;d ¼ �hajbihcjdi ¼ ��ab�cd
�abc;de ¼ habcjdei � �devabc
�abcd;e ¼ habcdjei�abc;d;e ¼ �devabc
�ab;cd;e ¼ ��abvcd;e � �cdvab;e
�abcde ¼ �habcdjei � habcejdi � habdejci � hacdejbi� hbcdejai � habcjdei � habdjcei � hacdjbei� hbcdjaei � habejcdi � hacejbdi � hbcejadi� hadejbci � hbcejaci � hcdejbai:
[1] G.M. Harry for the (LIGO Scientific Collaboration),Classical Quantum Gravity 27, 084006 (2010).
[2] http://wwwcascina.virgo.infn.it/advirgo.[3] http://www.aigo.org.au.[4] http://gw.icrr.u-tokyo.ac.jp/lcgt.[5] http://www.gw-indigo.org.[6] M. Zanolin, S. Vitale, and N. Makris, Phys. Rev. D 81,
124048 (2010).[7] S. Vitale and M. Zanolin, Phys. Rev. D 82, 124065
(2010).[8] L. Wen and Y. Chen, Phys. Rev. D 81, 082001 (2010).[9] S. Fairhust, Classical Quantum Gravity 28, 105021
(2011).[10] M. Vallisneri, Phys. Rev. D 77, 042001 (2008).[11] B. Aylott, B. Farr, V. Kalogera, I. Mandel, V. Raymond, C.
Rodriguez, M. van der Sluys, A. Vecchio, and J. Veitch,arXiv:1106.2547.
[12] P. Jaranowski and A. Krolak, Phys. Rev. D 49, 1723(1994).
[13] P. Jaranowski, K. D. Kokkotas, A. Krolak, and G. Tsegas,Classical Quantum Gravity 13, 1279 (1996).
[14] K. G. Arun, B. R. Iyer, B. S. Sathyaprakash, and P.A.Sundararajan, Phys. Rev. D 71, 084008 (2005).
[15] J. Markowitz, M. Zanolin, L. Cadonati, and E.Katsavounidis, Phys. Rev. D 78, 122003 (2008).
[16] H. Goldstein, Classical Mechanics (Addison-Wesley,Reading, MA, 1980), 2nd ed..
[17] K. S. Thorne, in 300 Years of Gravitation (CambridgeUniversity Press, Cambridge, England, 1987).
[18] C.W. Misner, K. S. Thorne, and J. A. Wheeler, Gravitation(W.H. Freeman, San Francisco, 1973).
[19] B. F Schutz and M. Tinto, Mon. Not. R. Astron. Soc. 224,131 (1987).
[20] S. V. Dhurandar and M. Tinto, Mon. Not. R. Astron. Soc.234, 663 (1988).
[21] A. Pai, S. Dhurandhar, and S. Bose, Phys. Rev. D 64,042004 (2001).
[22] B. S. Sathyaprakash and B. F. Schutz, Living Rev.Relativity 12, 2 (2009).
[23] W. Anderson, P. Brady, J. D. E. Creighton, and E. E.Flanagan, Phys. Rev. D 63, 042003 (2001).
[24] S. Nissanke, D. E. Holz, S. A. Hughes, N. Dalal, and J. L.Sievers, Astrophys. J. 725, 496 (2010).
[25] M. Tinto and S. V. Dhurandhar, Mon. Not. R. Astron. Soc.236, 621 (1989).
[26] N. D Magalhaes, W.W. Johnson, C. Rajuca, and O.D.Aguiar, Mon. Not. R. Astron. Soc. 274, 760 (1995).
[27] M. Maggiore, Gravitational Waves (Oxford UniversityPress, New York, 2007), Vol. 1.
[28] C. Rao, Linear Statistical Inference and its Application(Wiley, New York, 1966).
[29] P. Ajith, Classical Quantum Gravity 25, 114033 (2008).[30] P. Ajith et al., Phys. Rev. D 77, 104017 (2008).[31] P. Ajith and S. Bose, Phys. Rev. D 79, 084032 (2009).[32] B. Allen, arXiv:9607075.[33] W. Anderson, P. Brady, D. Chin, J. Creighton, K. Riles,
and J. Whelan, Report No. LIGO-T010110-00Z.[34] L. Blanchet, Living Rev. Relativity 9, 4 (2006).
APPLICATION OF ASYMPTOTIC EXPANSIONS FOR . . . PHYSICAL REVIEW D 84, 104020 (2011)
104020-21

[35] T. Damour, B. R. Iyer, and B. S. Sathyarakash, Phys. Rev.D 63, 044023 (2001).
[36] K. G. Arun, B. R. Iyer, B. S Sathyaprakash, and P. A.Sundararajan, Phys. Rev. D 72, 069903(E) (2005).
[37] B. F. Schutz, Classical Quantum Gravity 28, 125023(2011).
[38] B. Abbott et al., Rep. Prog. Phys. 72, 076901 (2009).[39] F. Acernese et al., Classical Quantum Gravity 25, 184001
(2008).[40] T. Accadia et al., Classical Quantum Gravity 28, 114002
(2011).
[41] S. Fairhust, New J. Phys. 11, 123006 (2009).[42] S. Vitale (unpublished).[43] S. Klimenko, G. Vedovato, M. Drago, G. Mazzolo, G.
Mitselmakher, C. Pankow, G. Prodi, V. Re, F. Salemi, andI. Yakushin, Phys. Rev. D 83, 102001 (2011).
[44] M. Gel’fand, R. A. Minlos, and Z. Ye Shapiro,Representations of the Rotation and Lorentz Groupsand their Applications (Pergamon Press, New York, 1963).
[45] K. Thorne, Rev. Mod. Phys. 52, 285 (1980).[46] J. N Goldber, E. T. Newman, F. Rohrlich, and E. C.G
Sudarshan, J. Math. Phys. (N.Y.) 8, 2155 (1967).
SALVATORE VITALE AND MICHELE ZANOLIN PHYSICAL REVIEW D 84, 104020 (2011)
104020-22