Embed Size (px)
Citation preview

1
Posicionamento Geodésico Posicionamento Geodésico pelo pelo GNSS GNSS
ProfProf. Eduardo de M. . Eduardo de M. BarbosaBarbosaee--mailmail:: [email protected]@ifto.edu.com.br

2
Introdução ao Introdução ao GNSSGNSS
O que é Posicionamento?
É o ato de determinar as coordenadas de um ponto em relação a um determinado referencial.

3
O que é posicionamento O que é posicionamento Geodésico ?Geodésico ?
É o ato de determinar as coordenadas de um ponto, com Precisão Geodésica, em relação a um determinado referencial Geodésico.
Foi um dos primeiros problemas científicos que o ser humano procurou solucionar.

4
GNSSGNSS• Global Navigation Satellite System- Sistema
Global de Navegação por Satélite) integra os vários sistemas disponíveis aos usuários de uma forma geral– Envolve:
• GPS, GLONASS, Galileo e Beidou/Compass• SBAS : Satellite Based Augmented System
– Aumento (Augmentation) do GPS/Galileo (WAAS, EGNOS, Gagan, MSAS, QZSS, MSAT e Beidou)
– SACCSA (Solución de Aumentación para Caribe, Centroamérica y Sudamérica) …
– http://www.rlasaccsa.com/PaginasPublicas/ProyectoSACCSA.aspx

5
Breve Histórico Sobre as Técnicas Breve Histórico Sobre as Técnicas de Posicionamentode Posicionamento• Astros• Bússola• Determinação da Latitude
- Astrolábio- Quadrante- Sextante
• Ondas de Rádio- Loran(Long-Range Navigation System)
- Decca (Low frequency continuous wave phase comparison navigation)
- Omega (Global low frequency navigation system)

6
Métodos de posicionamento antes Métodos de posicionamento antes do GPSdo GPS
Astrolábio Quadrante
Medindo a altura do Sol acima do horizonte com um Sextante

7
77
Breve Histórico Sobre as Técnicas de Breve Histórico Sobre as Técnicas de PosicionamentoPosicionamento
• Posicionar um objeto, nada mais é do que atribuir-lhecoordenadas. Foi um dos primeiros problemas científicos queo ser humano procurou solucionar.
• O homem sempre esteve interessado em saber onde eleestava; inicialmente restrito à vizinhança; mais tarde ampliou-se para os locais de comércio e finalmente, com odesenvolvimento da navegação marítima, praticamente pelomundo todo.
• Conquistar novas fronteiras de modo que o deslocamento daembarcação fosse seguro, exigia o domínio sobre a arte denavegar, ou seja, saber ir e voltar de um local a outro edeterminar posições geográficas, seja em terra ou no mar.

8
88
• Por muito tempo, Sol, planetas e as estrelas foram excelentesfontes de orientação. Mas, além da exigência de habilidadedo navegador, as condições climáticas podiam significar adiferença entre o sucesso e o fracasso de uma expedição.
• Surgiu em seguida, a bússola , inventada pelos chineses,que proporcionou uma verdadeira revolução na navegação.Mas ainda perdurava um problema: como determinar aposição de uma embarcação em alto mar?
• O astrolábio, a despeito de seu peso e tamanho, possibilitavaapenas à obtenção da Latitude, sujeita a grande margem deerro. E só podia ser realizada à noite, desde que com boavisibilidade.
• Melhorias ocorreram no transcorrer dos anos, com aintrodução de novos instrumentos, tais como o quadrante deDavis e o sextante.

9
99
• A determinação da Longitude foi considerada o maiorproblema científico do século XVIII, o qual se encontra bemretratado em Sobel (1996).
•
• Mesmo com os melhores instrumentos, a navegação celestesó proporcionava valores aproximados da posição, os quaisnem sempre eram apropriados para encontrar um portodurante à noite.
• Com o avanço da eletrônica, alguns sistemas foramdesenvolvidos, mas mesmo assim eles apresentavam algumtipo de problema. Qualquer navegador, provavelmente jádeve ter ouvido sobre o LORAN (Long-Range NavigationSystem), o DECCA (Low frequency continuous wave phasecomparison navigation) e o Omega (Global low frequencynavigation system).

10
1010
• Eles são baseados em ondas de rádio. Os dois primeirosfuncionam muito bem na faixa costeira, onde há uma rede deestações para dar suporte ao posicionamento. No entanto,um inconveniente desses sistemas é a impossibilidade deposicionamento global, além da limitação em termos deacurácia, devido à interferência eletrônica e variações dorelevo.
• O Omega, apesar de sua cobertura global, apresenta baixaprecisão e os equipamentos são de custos elevados.
• Um outro sistema desenvolvido, agora baseado em satélitesartificiais, foi o NNSS, também conhecido como Transit, cujasmedidas eram baseadas no efeito Doppler.

11
1111
• Nesse sistema, as órbitas dos satélites eram muitobaixas e não havia uma quantidade muito grande desatélites. Consequentemente, não se tinha como obterposições com muita freqüência.
• Faltava, portanto, uma solução que oferecesse boaprecisão, facilidade de uso e custos acessíveis para osusuários.
• A solução definitiva para o problema surgiu na décadade 70, com a proposta do GPS (Global PositioningSystem), que é o assunto principal do nosso curso .

12
Breve Histórico Sobre as Técnicas Breve Histórico Sobre as Técnicas de Posicionamentode Posicionamento
• Satélites Artificiais- Satélite Sputnik I pelos russos em 1957, começou a utilização de satélites para o posicionamento geodésico ;
- NNSS/TRANSIT (Efeito Doppler) :Esteve ativo de 1967 a 1996;

13
Histórico do Sistema GPSHistórico do Sistema GPS
• Em 1973 iniciou-se o desenvolvimento do Global Positioning System (GPS) (Figura 1), projetado pelo Departamento de Defesa dos Estados Unidos da América (EUA) para oferecer a posição instantânea, bem como a velocidade e o horário de um ponto qualquer sobre a superfície terrestre ou bem próxima a ela num referencial tridimensional.
• O sistema GPS entrou em operação em 1991 e em 1993 a constelação dos satélites utilizados pelo sistema foi concluída (Bloco I).

14
Figura 1- Satélite do Bloco II R do Sistema de Posicionamento Global (GPS)

15
Histórico do desenvolvimento do Histórico do desenvolvimento do GPSGPS• Desenvolvido e mantido pelo Departamento de
Defesa dos EUA
• Objetivo: ser o principal sistema de navegação das forças armadas americanas
• Em razão da alta acurácia, surgiram diversos usuários civis, em diversas áreas de atuação
• Custo do Sistema: 8 a 10 bilhões de US$

16
Histórico do desenvolvimento do Histórico do desenvolvimento do GPSGPS• Capacidade Operacional Inicial: Em 8/12/1993;
• Capacidade Operacional Completa: Em 27/04/1995 (Bloco II );
• Primeiro Satélite: Lançado em 1978 (1500 kg, US$ 50 milhões)
• Satélite do Bloco II: 2000 kg, US$ 25 milhões

17
Histórico do desenvolvimento do Histórico do desenvolvimento do GPSGPS• Primeiro Receptor: Macrometer (protótipo),
testado no MIT em 1982
• Métodos: Cinemático (1985), WADGPS (1989), RTK (1993)
• Monitoramento da Atmosfera com GPS: 1994

18
O que é o GPS ?O que é o GPS ?
O GPS (Sistema de Posicionamento Global) permite,através de satélites artificiais, a obtenção de informações sobre a posição do ponto.
Sistema: conjunto de partes (os segmentos)
Posicionamento: fornece a posição
Global : abrangência em todo o Globo

19
1919
Introdução ao GPSIntrodução ao GPS• O GPS, ou NAVSTAR-GPS (NAVigation Satellite with Time
And Ranging), é um sistema de radio-navegaçãodesenvolvido pelo Departamento de Defesa dos EstadosUnidos da América - DoD (Department of Defense), visandoser o principal sistema de navegação das forças armadasamericana.
•• Resultou da fusão de dois programas financiados pelo
governo norte americano para desenvolver um sistema denavegação de abrangência global: o Timation e System621B, sob responsabilidade da Marinha e Força Aérea,respectivamente.

20
2020
Introdução ao GPSIntrodução ao GPS• Em razão da alta acurácia proporcionada pelo sistema e do
grande desenvolvimento da tecnologia envolvida nosreceptores GPS, uma grande comunidade usuária emergiudos mais variados segmentos da comunidade civil(navegação, posicionamento geodésico, agricultura, controlede frotas, etc.)
• Como o nome sugere, o GPS é um sistema de abrangênciaglobal.
• Esse sistema tem facilitado todas as atividades quenecessitam de posicionamento, fazendo com que algumasconcepções antigas pudessem ser colocadas em prática.

21
2121
• Um exemplo claro disto é o que vem ocorrendo com odesenvolvimento da agricultura de precisão , um conceitoestabelecido por volta de 1929, que só agora tem sidocolocado em prática, graças a integração de váriasgeotecnologias, dentre elas o GPS.
• A concepção do GPS permite que um usuário, em qualquerlocal da superfície terrestre, ou próximo a essa, tenha à suadisposição, no mínimo quatro satélites para seremrastreados. Esse número de satélites permite que se realizeposicionamento em tempo real.
Introdução ao GPSIntrodução ao GPS

22
2222
• Para os usuários da área de Geodésia, uma característicamuito importante da tecnologia GPS, em relação aosmétodos de levantamento convencionais, é a nãonecessidade de intervisibilidade entre as estações. Alémdisto, o GPS pode ser usado sob quaisquer condiçõesclimáticas.
• O princípio básico de navegação pelo GPS consiste namedida de distâncias entre o usuário e quatro satélites.Conhecendo as coordenadas dos satélites num sistemade referência apropriado, é possível calcular ascoordenadas da antena do usuário no mesmo sistema dereferência dos satélites.
Introdução ao GPSIntrodução ao GPS
23
2323
• Do ponto de vista geométrico, apenas trêsdistâncias, desde que não pertencentes ao mesmoplano, seriam suficiente.
• O problema reduziria à solução de um sistema detrês equações, à três incógnitas. A quarta medida énecessária devido ao não sincronismo entre osrelógios dos satélites com o do usuário,adicionando uma incógnita.
Introdução ao GPSIntrodução ao GPS

24
Princípio básico de posicionamento Princípio básico de posicionamento pelo GPSpelo GPS
• Pode ser apresentado da seguinte forma:
“Conhecendo“Conhecendo--se as distâncias entre um receptor se as distâncias entre um receptor e e quatroquatro satélites e as coordenadas desses satélites e as coordenadas desses satélites em um determinado sistema de satélites em um determinado sistema de referência, é possível cálcular as referência, é possível cálcular as coordenadasda antena do receptor, neste mesmo sistema de da antena do receptor, neste mesmo sistema de referência”.referência”.

25
Princípio básico de posicionamento Princípio básico de posicionamento pelo GPSpelo GPSInício:0,00s
Fim:0,06s

26
Princípio básico de posicionamento Princípio básico de posicionamento pelo GPSpelo GPS• A posição está na superfície de uma esfera

27
Princípio básico de posicionamento Princípio básico de posicionamento pelo GPSpelo GPS• A posição está localizada na interseção de 2 esferas (um círculo)

28
Princípio básico de posicionamento Princípio básico de posicionamento pelo GPSpelo GPS• Podemos localizar a posição na intersecção de 3
esferas (2 pontos)

29
Princípio básico de posicionamento Princípio básico de posicionamento pelo GPSpelo GPS
•Pode-se, também selecionar entre 2 pontos, aquele que se localiza na superfície da Terra

30
Princípio básico de posicionamento Princípio básico de posicionamento pelo GPSpelo GPS
Porque são necessários 4 e não apenas 3 satélitespara possibilitar o posicionamento ?
Devido a não-sincronismo entre os relógios dos satélites edo receptor. Assim, aparece mais uma incógnita noproblema (∆t ), além de ∆X, ∆Y e ∆Z.

31
Figura 2- Triangulação a partir dos satélites é a base do sistema
Figura 3- Com quatro satélites obtém-se o posicionamento 3D
Princípio básico de posicionamento Princípio básico de posicionamento pelo GPSpelo GPS

32
Os segmentos do GPSOs segmentos do GPS
• O sistema de Posicionamento Global (GPS) é composto por 3 segmentos:
- Segmento Espacial
- Segmento de Controle
- Segmento de Usuários

33
Os segmentos do GPSOs segmentos do GPS

34
Os segmentos do Os segmentos do GPS GPS
• Segmento Espacial:
- 24 satélites, distribuídos em 6 planos orbitais Atualmente 31 satélites 15/03/2012
- Altitude aproximada de 20.200 km
- Período orbital de 12 horas siderais
- Planos orbitais inclinados 55°em relação ao Equador
• Esta configuração permite que, em qualquer lugar da superfície terrestre e a qualquer hora do dia, seja possível visualizar pelo menos 4 satélites.

35
Os segmentos do Os segmentos do GPS GPS
• Segmento Espacial:
EQUADORASCENSÃO RETA DO NODO ASCENDENTE
40
80
120
160
320
280
240
200
325,7 25,7 85,7 145,7 205,7 265,7
PLANO A B C D E F
1
2
3
4
1
03
4
4
1
2
3
1
2
3
4
4
1
2
3
1
2
3
4
0
0
0
0
0
0
0
0
00 0 0 0
2

36
• Segmento Espacial ...• Eles foram fabricados pela companhia Rockwell
International. O primeiro satélite desse bloco pesava maisde 1500 kg, com custo estimado em 50 milhões de dólaresamericano (Hofmann-Wellenhof, et al., 1997). Quando osistema foi declarado operacional, em 27 de Abril de 1995,
todos os satélites em operação pertenciam a esses doisBlocos.
3 Satélite GPS do Bloco II
Os segmentos do GPSOs segmentos do GPS
37
• Segmento Espacial ...• Estão sendo feitos testes e pesquisas para a utilização de
novos GPS’s, com tecnologias mais modernas,denominadas como a “nova geração de GPS’s ”. Trata-seda Block III , que promete ter receptores militares e civismais precisos, confiáveis e potentes. O protótipo do satéliteGPS Block III deve entrar em fase de testes em breve, nocomplexo de Lockheed Martin em Colorado, nos EstadosUnidos.
Satélite GPS do Bloco III
Os segmentos do GPSOs segmentos do GPS

38
Os Segmentos do GPSOs Segmentos do GPS
• Segmento de Controle: é composto de 5 estações monitoras. Estas cinco estações de monitoramento pertencem à American Air Force. Em conjunto com as sete estações do NationalImagery and Mapping Agency, compõem as estações monitoras GPS do DoD.

39
Os Segmentos do GPSOs Segmentos do GPS
• As principais tarefas do segmento de controle são:
- monitorar e controlar continuamente o sistema de satélites;
- determinar o sistema de tempo GPS;
- predizer as efemérides dos satélites;
- calcular as correções dos relógios dos satélites;
- atualizar periodicamente as mensagens de navegação de cada satélite.

40
Os Segmentos do GPSOs Segmentos do GPS
• Segmento de Controle...
• Cada estação monitora é equipada com oscilador externo de alta precisão e receptor GPS de dupla frequência, o qual rastreia todos os satélites visíveis e envia os dados para a estação de controle central, em Colorado Springs (EUA)

41
Os Segmentos do GPSOs Segmentos do GPS
• Segmento de Controle...
• Os dados são processados para determinar as órbitas dos satélites e as correções nos relógios dos satélites.
• Essas informações são, então enviadas aos satélites, para atualizar as mensagens de navegação.

42
Os Segmentos do GPSOs Segmentos do GPS
• Segmento de Usuários..
- Composto pelo conjunto de todos os receptores GPS, Destinados aos diversos fins
- Podem ser de uso civil ou militar.

43
Os Segmentos do GPSOs Segmentos do GPS
•Navegação para aviões, carros, navios e outros meios de transporte
• Posicionamento de objetos e dados no espaço
• Caminhamentos• Movimentos de placas tectônicas• Esportes Radicais• Correção geométrica de aerofotos e
imagens de satélite
• Controle e monitoramento Ambiental
Segmento de Usuários...Segmento de Usuários...

44
Segmento de UsuáriosSegmento de Usuários
Pesquisa AmbientalPesquisa Ambiental Soldados Nortes AmericanosSoldados Nortes AmericanosGuerra do AfeganistãoGuerra do Afeganistão
Pesquisa Geodésica Pesquisa Geodésica

45
Características dos sinais GPSCaracterísticas dos sinais GPS
• Hoje os satélites GPS emite 3 ondas portadoras : L1 e
L2 e L5.
• Essas ondas são baseadas na freqüência fundamental
de 10,23 MHz (f0 )
• L1:fL1=154*f0 =1575,42 MHz e λ= 19,05 cm
• L2:fL2=120*f0 =1227,60 MHz e λ= 24,45 cm
• L5:fL5=115*f0 =1176,45 MHz e λ= 25,50 cm
• Objetivo principal da transmissão de duas ou maisondas: correção dos efeitos de refração ionosférica noposicionamento

46
Características dos sinais GPSCaracterísticas dos sinais GPS
• Cada satélite GPS emite 2 códigos, modulados sobre as ondas portadoras
• O código C/A (coarse acquisition -fácil aquisição) é modulado sobre a L1 e o código P (precise/protected) é modulado sobre a L1 e L2
• C/A: fC/A =1,023 MHz e λ=293,1m (λ= c/f)
• P: fP =10,23 MHz e λ=29,31m
• L2C =

47
Características dos sinais GPSCaracterísticas dos sinais GPS
• O código P é reservado para o uso de militares americanos e usuários autorizados . Ele é criptografado ( a partir de 1994) e, nessa situação, é chamado de código Y.
• Devido o seu menor comprimento de onda, os posicionamentos via código P são mais precisos

48
Estrutura Básica do Sinal GPS Estrutura Básica do Sinal GPS --OriginalOriginal
FREQÜÊNCIA FUNDAMENTAL10,23 MHz
*120
L1
1575,42 MHz
CÓDIGO C/A
1,023 MHz
CÓDIGO P
10,23 MHz
L2
1227,60 MHz
CÓDIGO P
10,23 MHz
÷10 ÷1
*154

49
Estrutura Básica do Sinal GPS Estrutura Básica do Sinal GPS ––Atual/FuturoAtual/Futuro

50
Figura 5- Esquema e características dos sinais GPS.
Características dos sinais GPSCaracterísticas dos sinais GPS

51
Estrutura dos Sinais GPSEstrutura dos Sinais GPS

52
Os Sinais GPS: Mensagem Os Sinais GPS: Mensagem NavegaçãoNavegação
• Cada satélite transmite um conjunto de dados chamados Mensagem de Navegação, que são modulados nas portadoras L1 e L2, a uma taxa 50 bps (bits/s), perfazendo um total de 1500 bits, que se repetem a cada 30 segundos.

53
Os Sinais GPS: Mensagem Os Sinais GPS: Mensagem Navegação Navegação –– Conteúdo Conteúdo
• Informações contidas nas Mensagens de Navegação:- Coeficientes para correção do relógio do
satélite
- Número da semana GPS
- Saúde do satélite
- Idades dos dados
54
Os Sinais GPS: Mensagem Os Sinais GPS: Mensagem Navegação Navegação –– ConteúdoConteúdo
- Parâmetros orbitais: para cálculo das posições dos satélites para fins de posicionamento
- Almanaque dos satélites: para cálculo aproximado das posições dos satélites - para fins de planejamento de missão GPS
- Modelos da ionosfera

55
Componentes dos ReceptoresComponentes dos Receptores
Antena e PréAntena e Pré--amplificadoramplificador
Processador de sinalProcessador de sinal
Rastreador Rastreador de Códigode Código
Rastreador Rastreador de Fasede Fase
OsciladorOscilador
MicroMicro--ProcessadorProcessador
MemóriaMemória
Suprimento Suprimento de energia de energia externaexterna
Unidade de Unidade de comandos e comandos e display display
Descarregador Descarregador externo de externo de dadosdados

56
Componentes dos receptoresComponentes dos receptores
• Antena-Detecta as ondas eletromagnéticas emitidas pelossatélites, converte a energia da onda em correnteelétrica, amplifica o sinal e o envia para a parte eletrônicado receptor.
-Tipos: Monopole ou Dipole, Helix ou Volute, Spiral Helix,Microstrip ou Patch e Choke ring
-Para Levantamento geodésicos, a antena deve garantiralta estabilidade de seu centro geométrico e proteçãocontra Multicaminhamento.

57
Componentes dos receptoresComponentes dos receptores-Podem Permitir a recepção de sinal de uma ou duas ondas portadoras (L1 ou L1/L2

58
Componentes dos receptoresComponentes dos receptores
• Canais-É a unidade eletrônica por onde os sinais dos satélites são enviados para o processamento
-Nos receptores multicanal, cada canal rastreia continuamente um dos satélites visíveis
-No mínimo 4 canais devem estar disponível
-Atualmente, os receptores podem contar com até 12 canais GPS, ou 24 (GPS+GLONASS)
-Quando maior o número de canais disponíveis para os sinais GPS, maior o numero de satélites rastreados e, teoricamente, melhor a precisão.

59
Componentes dos receptoresComponentes dos receptores
• Seção de radio-freqüência : para identificação e processamento do sinal
• Micropocessador : para controle do receptor, amostragem e processamento dos dados (para navegação)
• Ocilador : para gerar réplicas dos sinais emitidos pelos satélites Gps

60
Componentes dos receptoresComponentes dos receptores
• Interface :para o Usuário, Painel de exibição e comandos
É interessante que permita, ao menos, entrada da identificação dos pontos rastreados, podendo ser diretamente no painel ou através de Palmtop
• Memória
- Quando maior a memória, maior a autonomia em campo
- Recomendável: mínimo de 4 MB

61
Componentes dos receptoresComponentes dos receptores
• Provisão de energia. Deve-se observar:
- Autonomia de uso: em horas (no mínimo 10 h)
- Presença de dispositivo que descarrega a bateria antes da realização da carga
- Efeito memória: Elementos químicos da bateria
- Integração: Bateria externa ou integrada ao receptor. Neste último caso, o receptor só pode ser utilizado após recarregar (não permite bateria extra).

62
Receptores GPS de NavegaçãoReceptores GPS de Navegação

63
Receptores GPSReceptores GPS
GeoTechGeoTech
TRIMBLE TRIMBLE R7R7
GTR1GTR1--GTRAGTRA
DL DL --44
Leica SRLeica SR--2020

64
Receptores GPSReceptores GPS
HIPERHIPER
SOKKIA GSR SOKKIA GSR 26002600
ZZ--MAXMAX

65
Trimble Estação Total mod 5700Trimble Estação Total mod 5700
Receptores GPSReceptores GPS
Leica GPS1200Leica GPS1200
Trimble R8 Trimble R8 GNSSGNSS

66
Receptores GPSReceptores GPS
ALL SATALL SAT
Hiper 2Hiper 2
GRGR--33

67
Descrição dos Receptores GPSDescrição dos Receptores GPS
• Os receptores GPS podem ser classificados de três formas segundo critérios específicos:
- para uso da comunidade usuária militar ou civil;- para aplicação em navegação, geodésia e uso direto em
Sistemas de Informações Geográficas (SIG); - e segundo os diferentes tipos de receptores e dados
proporcionados;(é o caso dos receptores com código C/A)(código C/A e portadora L1)(código C/A e portadoras L1 e L2 ) (código C/A e P e portadoras L1 e L2 )(código C/A, P, L2C, L5C e portadoras L1, L2 e L5 )

68
S.A. Disponibilidade SeletivaS.A. Disponibilidade Seletiva
• Devido a uma alta acurácia obtida nos primeiros testes do GPS (em terno de 20 a 40 m), o governo americano implementou o SA (Selective Availability), que era um programa que degradava a acurácia do posicionamento a partir do código C/A. Isso era conseguido através:
- Manipulação das efemérides transmitidas (técnica ε)
- Desestabilização do oscilador do satélite (técnica δ)

69
S.A. Disponibilidade SeletivaS.A. Disponibilidade Seletiva
• No dia 01 de maio de 2000, o governo americano anunciou o fim do SA e anunciou o início do SD (Selective Denial).
• Como resultado imediato, a precisão proporcionada pelo GPS, para posicionamento em navegação, melhorou cerca de 10 vezes, passando para algo entre 10 e 15 metros.

70
S.D. S.D. –– Proibição SeletivaProibição Seletiva
• Com o fim do S.A., o governo americano anunciou o S.D. (Selective Denial), que é uma tecnologia destinada a negar o acesso aos sinais GPS, em uma determinada região do planeta, sempre que a segurança dos EUA for ameaçada.

71
A.S. A.S. –– Código AntiCódigo Anti--TrapaçaTrapaça
• O A.S. (Anti-Spoofing) é um programa americano de não-permissão de acesso ao código P,visando evitar qualquer tipo de fraude contra ele (ex.:gerando códigos P falsos).
• O A.S. criptografia o código P, resultado no código Y, cujo acesso só está disponível a usuários autorizados.
• Os fabricantes de receptores geodésicos utilizam diferentes estratégicas para acessar o código P/Y.
72
Técnicas de Processamento do Técnicas de Processamento do SinalSinal• Diversas técnicas são empregados para obter os
componentes do sinal enviado pelos satélites GPS. Algumas dessas técnicas são:
- Correlação do código: obtém todos os comprimentos (leitura do relógio do satélite, mensagem de navegação e portadora sem modulação) do sinal. É usada quando o A.S. não está em operação ou quando não se aplica (portadora L1)
- Quadratura do Sinal/Correlação Cruzada /Z-tracking: são as técnicas mais usadas pelos fabricantes quando o A.S. está ativado.

73
Técnicas de Processamento do Técnicas de Processamento do SinalSinal

74
Técnicas de Processamento do Técnicas de Processamento do SinalSinal

75
O Sistema de Tempo O Sistema de Tempo GpsGps
• Os sinais de tempo transmitidos pelos satélites GPS estão sincronizados com os relógios atômicos da estação de controle.
• O tempo GPS foi estabelecido as 00 hs TU de 6 dejaneiro de 1980, mas não é incrementado pelo salto desegundos do TUC;
• Desta forma, há uma diferença de 19 segundos entre otempo GPS e o TAI, valor que se refere a diferençaentre o UTC e o TAI na época do início da contagem dotempo GPS;
• Já em relação ao UTC, a diferença é crescente.Atualmente, julho de 2012, a diferença em questão é de35 segundos; UTC-TAI = - 35s

76
O sistema de Tempo GPSO sistema de Tempo GPS
• A relação entre UTC e tempo GPS faz parte dosboletins de tempo do USNO (United State NavalObservatory – Observatório naval dos EstadosUnidos) e do BIPM, sendo também disseminadanas mensagens de navegação dos satélitesGPS.
• Em junho de 2005, a diferença era deaproximadamente 13 s (. A relação exata podeser obtida em Seeber (2003, p.37).
sUTCt jGSP 13)2005 de inho)( +=−

77
O Sistema de Tempo GpsO Sistema de Tempo Gps
• O Tempo GPS é dado pelo número da semana GPS (GPS Week Number) e pelo número de segundos, desde o início da semana.
• O número de semanas GPS varia de 0 a 1023 (≈20 anos) e o número de segundos da semana (TOW –Time of Week) varia de 0 (ás 0 horas de Domingo) a 604.800 (ás 24 horas de Sábado), que corresponde ao fim da semana (86.400s x 7 dias).

78
O Sistema de Tempo GpsO Sistema de Tempo Gps
• O primeiro ciclo do tempo GPS (1024 semanas),que iniciou em 6/01/1980, se encerrou em21/08/1999, tendo o número de semanas reiniciadoa partir da semana 0.
• Devido a este fato, diversos equipamentos que nãoestavam preparados sofreram o chamado bug doGPS, sendo que alguns ficaram definitivamenteinservíveis.
• Para fins práticos, o numero da semana GPS ésempre referido por um número continuo (após asemana 1023)
79
O sistema de Tempo GPSO sistema de Tempo GPS
Exemplo:
GPS Week Number =1283
Time of Week (TOW) =321.486
Corresponde ás 17h18min06s (UTC) do dia 11/08/2004 (quarta-feira) - 2°Ciclo GPS.

80
Calendário GPSCalendário GPS
Interactive GPS Calendar.htm
Site:http://Site:http://www.rvdi.com/freebies/gpscalendar.html www.rvdi.com/freebies/gpscalendar.html
81
Proposta de modernização do GPSProposta de modernização do GPS
• Algumas propostas divulgadas:
- O controle do Gps passa a ter, também, membros da sociedade civil;
- Melhoria da qualidade das órbitas e correções dos relógios dos satélites;
-O código L2C será modulado, também, na L2;
-Será criada uma nova portadora (L5), modulada com um código de acesso civil, com menor comprimento de onda (f=10,23 MHz) e, portanto, mais preciso.
-Site: www.navcen.uscg.gov/gps/modernization/

82
Situação Atual da Constelação GPSSituação Atual da Constelação GPSSEQÜÊNCIA DE LANÇAMENTO
SVN Código PRN DATA DE LANÇAMENTO
POSIÇÃO NO PLANO
ORBITAL
SITUAÇÃO
SATÉLITES DO BLOCO I
I-1I-2I-3I-4I-5I-6I-7I-8I-9I-10I-11
0102030405060708091011
04070608050911131203
02/7805/7810/7812/7802/8004/8007/8306/8409/8410/85
C3C1A1C4
DESATIVADO 07/85DESATIVADO 07/81DESATIVADO 05/92DESATIVADO 10/89DESATIVADO 11/83DESATIVADO 03/91
FALHA NO LANÇAMENTODESATIVADODESATIVADODESATIVADODESATIVADO
SATÉLITES DO BLOCO II
II-1II-2II-3II-4II-5II-6II-7II-8II-9
141316191718202115
140216191718202115
02/8906/8908/8910/8912/8901/9003/9008/9010/89
E1B3E3A4D3F3B5E2D2
DESATIVADO DESATIVADO DESATIVADO
DESATIVADODESATIVADO DESATIVADO
DESATIVADODESATIVADO DESATIVADO
SATÉLITES DO BLOCO IIA
II-10II-11II-12II-13II-14II-15II-16II-17II-18II-19II-20II-21II-22II-23II-24II-25II-26II-27II-28
23242528262732292231373935343633403038
32242528262701292231070905040603103008
11/9007/9102/9204/9207/9209/9211/9212/9202/9303/9305/9306/9308/9310/9303/9403/9607/9609/9611/97
E4D1A2C2F2A3F1F4B1C3C4A1B4D4C1C2E3B2A5
OPERACIONAL OPERACIONALOPERACIONALDESATIVADO
OPERACIONALOPERACIONALOPERACIONALDESATIVADODESATIVADO
DESATIVADO DESATIVADOOPERACIONALOPERACIONALOPERACIONALOPERACIONALOPERACIONALOPERACIONALOPERACIONALOPERACIONAL
SATÉLITES DO BLOCO IIR
IIR-1IIR-2IIR-3IIR-4IIR-5IIR-6IIR-7IIR-8IIR-9IIR-10IIR-11IIR-12IIR-13
IIR-14MIIR-15MIIR-16MIIR-17MIIR-18M
424346514441545645475960615352585557
121311202814181621221923021731121529
01/9707/9710/9905/0007/0011/0001/0101/0303/0312/0303/0406/0411/0409/0509/0611/0610/0712/07
F3D2E1B3F1E4B1D3E2C3F4D1C4A2B5B4F2
FALHA NO LANÇAMENTOOPERACIONALOPERARIONALOPERACIONALOPERACIONALOPERARIONALOPERACIONALOPERACIONALOPERARIONALOPERACIONALOPERACIONALOPERARIONALOPERACIONALOPERACIONALOPERARIONALOPERACIONALOPERACIONAL

83
Outros Sistemas de Outros Sistemas de Posicionamento por SatélitesPosicionamento por Satélites
• GLONASS: Controlado pela Russia, possui mesma metodologia que o GPS:
-Atualmente quase operacional
- Existem receptores que manipulam dados do satélites GLONASS e GPS simultaneamente, com até 72 canais (Ex: HIPER GGD)

84
GLONASSGLONASS• 24 satélites em
operação e saudáveis• Há planos para
modernização;• Lançamentos mais
recente:– 25/09/2008 – 3 satélites;– 25/12/2008 – 3 satélites;
• Planos:– Próximos lançamentos
(29/10 e 25/12) 3satélites cada
– Constelação completapara breve. – 24 satélitesem 2011.
85
Segmento de controleSegmento de controle• O segmento de controle terrestre é responsável por:
– predição das órbitas dos satélites;
– -transferir as efemérides, correções dos relógios e almanaques em cada um dos satélites;
– sincronizar os relógios dos satélites com o sistema de tempo do GLONASS;
– estimar as discrepâncias entre o sistema de tempo do GLONASS e o TUCUS; e
– controle dos satélites.
• O segmento de controle terrestre é composto por:– sistema de controle central;
– central de sincronização de tempo (Central Synchronizer);– várias estações de comando e rastreio; e– estações de rastreamento a laser.
– O centro de controle terrestre é localizado em Moscou e as estações de monitoramento são distribuídas homogeneamente no território da antiga
União Soviética.

86
• No que concerne ao referencial geodésico, atualmente ascoordenadas das estações de controle e dos satélites são dadasno PZ 90 (Parametry Zemli 1990), conhecido em inglês como PE90 (Parameters of the Earth 1990 – Parâmetros da Terra 1990)(BAZLOV et al., 1999).– Anteriormente adotou-se, por longo período, o SGS 85 (Soviet Geodetic System
of 1985 – Sistema Geodésico Soviético de 1985).
• Entre os resultados da campanha IGEX-88 (InternationalGLONASS Pilot Experiment) pode-se citar os parâmetros detransformação entre o PZ-90 e outros referenciais, tais como oWGS 84 e ITRF-97, essenciais para a integração com outrossistemas.
– Essa campanha foi realizada sob os auspícios da IAG e IGS, entre outubro de1998 e abril de 1999, visando explorar o potencial do GLONASS para acomunidade geodésica.
– Depois deste projeto, um determinado número de estações continuou rastreandocontinuamente, num projeto piloto denominado IGLOS (International GLONASSService), sob os auspícios da IAG.
– Desde a semana GPS 979 (11 de outubro de 1998), são geradas órbitasprecisas do GLONASS: ftp://cddis.gsfc.nasa.gov/pub/glonass/products/.
8686

87
Outros Sistemas de Outros Sistemas de Posicionamento por SatélitesPosicionamento por Satélites• Galileo:Projetado pela Agência Espacial Européia,
mas com participação de outras nações fora da Europa, ainda não está operacional:
- Terá controle civil, compatível com o GPS, mas independente deste
- Espera-se uma maior precisão nos posicionamentos
- Aguarda-se sua operacionalização inicial para 2010
- Deve provocar uma nova “ revolução” na área e, talvez, uma competição entre os sistemas

88
GalileoGalileo
• A decisão do governo americano em nãoautorizar que outras nações pudessem participardo controle de uma configuração básica do GPS,levou a União Européia a desenvolver suasolução própria para o GNSS;
• Em Fevereiro de 1999, a UE fez umarecomendação para que os Europeusdesenvolvessem uma nova constelação desatélites para navegação.

89
GalileoGalileo
• A ESA (European Space Agency – Agência Espacial Européia) em conjunto com a Comissão Européia e a indústria Européia vem desenvolvendo um sistema de navegação por satélite europeu, sob a denominação de Galileo. – Esse sistema terá controle civil e inter operabilidade com o GPS
e GLONASS.
• Da mesma forma que o GLONASS e GPS, o sistema é composto por 3 segmentos:– Espacial– Controle e de
– Usuários.

90
Distribuição da constelação do Distribuição da constelação do GalileoGalileo
9090

91
GalileoGalileo
Número de PlanosNúmero de Planos 33
Satélites p/planoSatélites p/plano 1010
SemiSemi--eixo maioreixo maior 29900 29900 kmkm
InclinaçãoInclinação 5656°°
PeríodoPeríodo orbital: 14hs 04 orbital: 14hs 04 minmin
ÓrbitasÓrbitas
GPSGPS
GalileoGalileo

92
Segmento de ControleSegmento de Controle• No que concerne ao segmento de controle, a estrutura
disponível para o EGNOS está sendo aproveitada ao máximo,com o acréscimo de algumas estações, em razão daabrangência global do mesmo.
• Ao todo, aproximadamente 30 estações distribuídas globalmente, (Galileo Sensor Stations - GSS) darão suporte a determinação de órbitas e sincronização de tempo. Elas proporcionarão os dados para os dois GCCs (Galileo ControlCenters). – Um desses centros será responsável pela geração das mensagens
de navegação e sistema de tempo, enquanto o outro fica responsável pelo controle da integridade.
– Esse segmento será interconectado por uma rede de comunicação, com duas cadeias independentes, com operação quase autônoma.
– Isso garantirá controle da integridade interna e operações de alta qualidade.

93
Segmento de usuáriosSegmento de usuários
• Da mesma forma que nos demais sistemas, o segmento de usuários do Galileo envolverá os vários tipos de receptores que serão industrializados.
• Já há alguns receptores aptos para rastrear os sinais do GIOVE A e do GIOVE B.
– Por exemplo, a Novatel já desenvolveu um receptor capaz de rastrear dados do GPS e do Galileo.
– Outras companhias caminham na mesma direção.
– O receptor GGG da Topcon está preparado para rastrear dados dos três sistemas apresentados (GPS, GLONASS e Galileo).
9393

94
GalileoGalileoService DefinitionService Definition
Open Service (OS)Open Service (OS)
Search and Rescue Search and Rescue Service (S&R)Service (S&R)
Public Regulated Service (PRS)Public Regulated Service (PRS)
Safety-of-Life Service (SoL)
Commercial Service (CS)Commercial Service (CS)
95
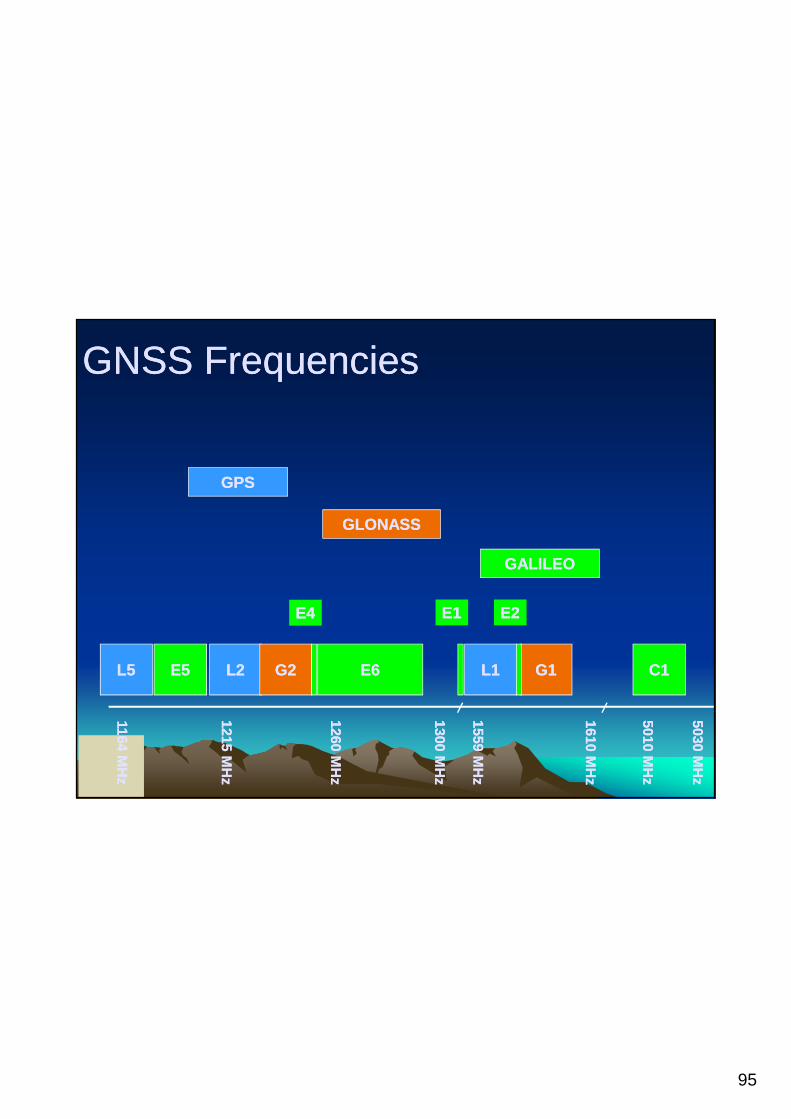
GNSS FrequenciesGNSS Frequencies
1215 MH
z1215 M
Hz
1260 MH
z1260 M
Hz
1164 MH
z1164 M
Hz
1300 MH
z1300 M
Hz
5010 MH
z5010 M
Hz
5030 MH
z5030 M
Hz
1559 MH
z1559 M
Hz
1610 MH
z1610 M
Hz
L2L2 L1L1L5L5
GPSGPS
G2G2 G1G1
GLONASSGLONASS
E5E5 C1C1E6E6
E4E4 E1E1 E2E2
GALILEOGALILEO

96
Galileo Galileo –– Primeiro lançamentoPrimeiro lançamento
• O primeiro satélite Galileo (GIOVE A) foi lançado em dezembro de 2005.
• Já há no mercado receptores para rastreá-lo, bem como em conjunto com o GLONASS e GPS..
• G3 da Topcon, R8 da Trimble, etc.

97
Beidou II / CompassBeidou II / Compass•• SistemaSistema militarmilitar
•• EmEm NovembroNovembro de 2006 a China de 2006 a China anunciouanunciou queque o o BeioduBeiodu iriairia
ofereceroferecer um um serviçoserviço civil com civil com acurácia de 10 m.acurácia de 10 m.
•• CapacidadeCapacidade de de posicionamentoposicionamentoglobalglobal
•• SalélitesSalélites MEO (21,550km)MEO (21,550km)•• PrimeiroPrimeiro satélitesatélite Compass MCompass M--1 1 foifoi
lançadolançado emem 14 14 AbrilAbril 20072007•• Plano Plano atualatual –– 35 35 satélitessatélites
––30 MEO30 MEO––5 Geo5 Geo
•• TransmitindoTransmitindo L1 e L5L1 e L5

98
Parâmetros GLONASS GPS Galileo
Número de satélites 24 24 30
Planos orbitais 3 6 3
Inclinação 64.8º 55º 56º
Altitude 19100 km 20233 km 23600 km
Freqüências1240-1260 MHz
1597-1617 MHz
L1:1575 MHz
L2: 1227 MHz
L5: 1176 MHz
E1: 1575 MHz
E5B: 1207 MHz
E5A: 1176 MHz
RastreamentoRepete-se a cada 8 dias
Repete-se a cada 12 horas
siderais
Repete-se a cada 10 dias
C/A Code 511 kbits/sec1023
kbits/sec1023
kbits/sec
P Code 5.11 MHz 10.23 MHz 10,23 MHz
Potência L1 L2 Mesma Diferente ???
Efemérides P,V,T Keplerian Keplerian
Identificação dos satélites FDMA/??? CDMA CDMA
Almanaque Kepleriano Kepleriano Kepleriano

99
Posicionamento Geodésico Posicionamento Geodésico pelo NAVSTARpelo NAVSTAR--GPSGPS
COORDENADAS DOS SATÉLITES GPS
Curso de Capacitação em GPS

100
Efemérides dos SatélitesEfemérides dos Satélites
• Fornecem as informações necessárias para o cálculo da posição dos satélites em um determinado instante (X, Y, Z)
• Essas posições são fundamentais para o cálculo das coordenadas dos receptores (Princípio Básico do Posicionamento GPS)

101
Efemérides dos SatélitesEfemérides dos Satélites
Figura 4- Posicionamento GPS baseado no centro de massa da Terra

102
Efemérides TransmitidasEfemérides Transmitidas
• As Efemérides Transmitidas são geradas pelas Estações de Controle e enviadas a cada um dos satélites.
• Elas são atualizadas diariamente, ou mais
frequentemente, se necessário.

103
Efemérides TransmitidasEfemérides Transmitidas
• Atualmente possuem acurácia na ordem de 1 metro na órbita dos satélites (Inicialmente esta acurácia podia chegar a 20m).
• Entretanto, esse erro orbital é bastante reduzido no posicionamento relativo. Dessa forma, as Efemérides Transmitidas podem ser utilizadas adequadamente em posicionamento geodésicos
• Para eliminar essa fonte de erros, ainda que pequena, pode-se utilizar as Efemérides Precisas

104
Elementos DefinidoresElementos Definidores

105
105105
Parâmetros da Órbita GPS Parâmetros da Órbita GPS Contidos nas Efemérides Contidos nas Efemérides
TransmitidasTransmitidas
Crc,Crs
Cuc,Cus
Cic,Cis
toe
Perigeu
Equador
ω
Ω0
γ
ωε
i0
&i
M0
∆n
vk
&ΩÓrbita (a,e)X
Y
Z

106
106106
Coordenadas dos Satélites Coordenadas dos Satélites a partir das Efemérides a partir das Efemérides
TransmitidasTransmitidasAs coordenadas do satélite devem ser calculadas para um determinado instante, As coordenadas do satélite devem ser calculadas para um determinado instante, podendo ser escolhido entre o instante de podendo ser escolhido entre o instante de transmissãotransmissão ou de recepção do sinal. ou de recepção do sinal.
sst
tGPS dttt −=
2210 )()(
cc oGPSoGPSs ttattaadt −+−+=
eotGPSk ttt −=∆
(exato) 8981415926535,3
/x102921151467,7
/10418,986004,35-
2314
=Π=
=srad
smxGM
eω
30 aGMn =
0kM
0
ktnM
nnn
∆+=∆+=
)sen( kKk EeME +=
))cos(1()sen(1)sen(
))cos(1())cos(()cos(
2kkk
kkk
EeEev
EeeEv
−−=
−−=
Anomalia VerdadeiraAnomalia Verdadeira

107
107107
Coordenadas dos Satélites a Coordenadas dos Satélites a partir das Efemérides partir das Efemérides
TransmitidasTransmitidas
)2sen()2cos(
uk
kuskuck
kk
kk
CCu
wv
u
Φ+Φ=+=Φ+Φ=
δ
δ
Perigeu
NodoAscendente
Geocentro
ω
v k
uk
xk
yk
x
y
- uk = argumento da latitude corrigido;
- Φ k = argumento da latitude;
- δuk = correção do argumento da latitude
)2sen()2cos(
))cos(1(
krskrck
kkk
CC
rEear
r Φ+Φ=+−=
δδ rk = raio vetor corrigido;
-δrk = correção do raio vetor;
- ik = inclinação corrigida;
- δi k = correção da inclinação;
)(
)cos(
kkk
kkk
usinry
urx
== )2sen()2cos(i
k
0
kiskic
kkk
CC
itiii
Φ+Φ=+∆+=
δδ&
Coordenadas Planas do SatéliteCoordenadas Planas do Satélite

108
108108
Coordenadas dos Satélites a Coordenadas dos Satélites a partir das Efemérides partir das Efemérides
TransmitidasTransmitidas
Equadorωε
X
Y
Z
x
y
iX (0 Hs GPS)
Nodo ascendente( toe)
Nodo ascendente ( tGPS )tGPS( )
w te GPS
Ω0
Ωk
&Ω∆tk
Geocentro
GPSekk twt −∆Ω+Ω=Ω &0
)sen(
)cos()cos()sen(
)cos()sen()cos(
kkk
kkkkkk
kkkkkk
iyZ
iyxY
iyxX
=
Ω+Ω=
Ω−Ω=
)()( kXkZ iRR −Ω−
Coordenadas Terrestres (WGSCoordenadas Terrestres (WGS--84) do Satélite84) do Satélite

109
109109
Órbitas Precisas (Órbitas Precisas ( Precise Precise EphemerisEphemeris
• A produção de efemérides pós processadas,denominadas efemérides precisas, visa atenderusuários necessitando de posicionamento comprecisão melhor que a proporcionada pelasefemérides transmitidas.
•
• Inicialmente, o NIMA era o único órgão a produziresse tipo de serviço; mas, várias instituições civispassaram a reunir esforços para organizar umarede civil. Com isto surgiu a CIGNET (CooperativeInternational GPS NETwork), por volta de 1990, soba coordenação do NGS (US National GeodeticSurvey).

110
110110
Órbitas Precisas (Órbitas Precisas ( Precise Precise EphemerisEphemeris
• O IGS, inicialmente denominado Serviço GPSInternacional para Geodinâmica (InternationalGPS Geodinamic Service), instalado em 1991,sob a supervisão da IAG, também tem dentre osseus objetivos a produção de efeméridesprecisas.
• Atualmente, sob a denominação de ServiçoGPS Internacional, trata-se de um CentroTécnico do IERS em assuntos relacionados como GPS, GLONASS e outros sistemas denavegação por satélite planejados para apróxima década.
111
111111
– O IGS compreende uma rede mundial, com mais de200 estações distribuídas pelo mundo. Dentro de suaestrutura, existem os Centros de Análises,responsáveis pela produção, dentre outros produtos,das efemérides precisas. A Rede CIGNET, do NGS, foiincorporada ao IGS.
• Os Centros de Análises existentes atualmente são:• CODE - Center for Orbit Determination for Europe, Berne,
Switzerland;• NRCan - National Resources Canada ( formerly Energy, Mines, and
Resources, Ottawa, Canada;• ESOC - European Space Operation Center, ESA, Darmstadt,
Germany;• GFZ - Geodatisches ForschungsZentrum, Potsdam, Germany;
• JPL - Jet Propulsion Laboratory, Pasadena, CA;• NOAA - National Ocean Atmospheric Administration/NGS, USA
• SIO - Scripps Institution of Oceanography, La Jolla, CA.

112
Efemérides PrecisasEfemérides Precisas
• São produzidas para atender usuários que necessitam de maior precisão do aquela fornecida pelas Efemérides Transmitidas
• Estão disponíveis na Internet, em diversos Centros de Pesquisa
• Baseiam-se nos dados recebidos em mais de 200 estações distribuídas no mundo
• O programa de processamento GPS deve ser informado quando se deseja utilizar as efemérides precisas

113
Efemérides Transmitidas x Efemérides Transmitidas x PrecisasPrecisas
Broadcast Ephemerides (+/- 1-20m)
Precise Ephemerides (+/- 2,5cm)

114
Efemérides Precisas DisponíveisEfemérides Precisas Disponíveis
-IGS: resultante da combinação das órbitas produzidas por vários centros de análise.
• Disponibilidade: 12 a 18 dias• Acurácia: 2,5 cm
-IGR: órbitas IGS rápidas• Disponibilidade dentro de 17 a 41 horas• Acurácia 2,5 cm
-IGU: órbitas IGS ultra-rápidas• Disponibilidade: 3 a 9 horas
• Acurácia: 3 a 5 cm

115
Efemérides PrecisasEfemérides Precisas
• A identificação das efemérides Precisas gerada pelo IGS (International GPS Service) se dá a partir da sigla do centro que a produz,a semana GPS corresponde e o dia da semana (cada arquivo corresponde a 24 horas).
• Exemplo:
-IGS12432.SP3 = Efeméride produzida pelo IGS, corresponde á terça-feira da semana GPS1243.
-SP3 ou EF18 = Padrões para extensão dos nomes dos arquivos de efemérides, em formato ASCII (SP3) ou binário (EF18)

116
116116
• As efemérides IGS são compostas pelascoordenadas X, Y e Z dos satélites, emkm, referenciadas a um dos vários ITRFs,e correções dos relógios dos satélites, emmicro-segundos, os quais são dados, emépocas eqüidistantes, em geral, a cada 15minutos.
Efemérides PrecisasEfemérides Precisas

117
Efemérides Precisas Efemérides Precisas –– Quando Quando UsarUsar
• Em atividades de alta precisão e importância
• Em bases longas (acima de 50 km),parapossibilitar a obtenção de soluções fixas daambigüidade no processamento GPS
• No uso do GPS na determinação altimétrica, poissua performance é tradicionalmente melhor naplanimetria
• www.profsurv.com/ps_scripts/article.idc?id=1083

118
Efemérides Precisas Efemérides Precisas -- SitesSites
• Alguns sites que disponibilizam as Efemérides Precisas:-www.ngs.noaa.gov/gps/gps.html-http://igscb.jpl.nasa.gov/-www.navcen.uscg.gov/gps/precise/

119
119119
Dados e Mensagem de Dados e Mensagem de Navegação no Formato RINEXNavegação no Formato RINEX
• A leitura das mensagens, bem como das observáveis, érealizada em cada receptor usando seu próprio formatobinário. Para facilitar o intercâmbio de dados foi desenvolvidoo formato RINEX (Receiver INdependent EXchange format)– Há 3 versões disponíveis; o RINEX 1, 2 e 3. A versão 2, e
2,11, e uma versão mais antiga que a recente 3.x que é arecomendada para uso com dados GNSS atualmente.
• A maioria dos fabricantes de receptores geodésicos forneceprogramas para efetuar a conversão de dados para o formatoRINEX, bem como para o formato do receptor.

120
Formato RINEXFormato RINEX
• É um formato de intercâmbio de dados GPS coletados pelos receptores
• Compõe-se de três arquivos:
- Observações
- Dados Meteorológicos
- Mensagens de Navegação
• A versão atual é o padrão RINEX II (Receiver Independent Exchange Format Version 2)
• Importância: podem ser utilizados receptores de diferentes fabricantes em uma mesma missão

121
Posicionamento Geodésico Posicionamento Geodésico pelo NAVSTARpelo NAVSTAR--GPSGPS
TÉCNICAS DE POSICIONAMENTO GPS
Curso de Capacitação em GPS

122
Métodos de Posicionamentos Métodos de Posicionamentos GPSGPS• Posicionamento Absoluto: Quando as coordenadas
obtidas estão associadas diretamente ao Geocentro.
• Posicionamento Relativo: Quando as coordenadas obtidas estão associadas a um referencial materializado por um ou mais vértices de coordenadas conhecidas (∆X, ∆Y e ∆Z)
• Posicionamento DGPS (Differential GPS): Ascoordenadas são determinadas com relação aspseudodistâncias corrigidas com base em uma estaçãode referência, já em termos de referencial pode serconsiderado posicionamento por ponto.

123
Classificação dos Classificação dos Posicionamentos GPSPosicionamentos GPS• Posicionamento Estático: Quando o
receptor permanece no mesmo ponto por um tempo relativamente grande:
• Posicionamento Cinemático: Quando o receptor ocupa diversos pontos durante um pequeno intervalo de tempo

124
Posicionamento AbsolutoPosicionamento Absoluto
• O posicionamento Absoluto (ou Posicionamentopor ponto ou Posicionamento Autônomo) éaquele onde é utilizado apenas um receptor e,na prática as coordenadas são determinadasem tempo real, usando a pseudodistânciaderivada do código C/A presente na portadoraL1, sem serem aplicadas técnicas de correçãodiferencial dos erros.

125
Posicionamento AbsolutoPosicionamento Absoluto

126
Posicionamento AbsolutoPosicionamento Absoluto
• Normalmente, o Posicionamento Absoluto érealizado empregando-se um receptor GPS deNavegação
• Esse tipo de receptor não armazena asobservações (ondas e códigos) recebidas dossatélites, apenas uma quantidade limitada decoordenadas dos pontos, chamados Waypoints (de250 a 1000 pontos) e caminhos, chamadosTracklogs (acima de 1000 pontos).

127
Posicionamento AbsolutoPosicionamento Absoluto
• Após o fim do SA o Posicionamento Absoluto tem fornecido precisões entre 3 e 10 m e acurácia muitas vezes em torno de 10 m. Globalmente a precisão fornecida é de 7 m.
• É possível realizar um posicionamento absoluto de precisão, alcançando precisão em torno de alguns centímetros. Entretanto, seu custo é maior, pois exige equipamento de alto custo e software específico.
• Esta técnica é denominada de PPP. (Posicionamento por Ponto Preciso)

128
PPP PPP –– Posicionamento Por Ponto Posicionamento Por Ponto PrecisoPreciso
••Necessita de receptores de dupla Necessita de receptores de dupla freqüênciafreqüência••AplicaAplica--se parâmetros precisos.se parâmetros precisos.••Resultados similares aos de uma rede GPS Resultados similares aos de uma rede GPS (baixo custo)(baixo custo)
••UtilizaUtiliza--se observações de fase e de se observações de fase e de pseudodistânciapseudodistância••Equação de observação da fase de um Equação de observação da fase de um receptor receptor A A com relação a um satélite com relação a um satélite SS
=S
Aλθ S
Aρ +−+ )(.
A
S dtdtc +− S
AI ])()([
00
S
AA
S Ntt +−φφλ S
Aθε+S
AT

129
PPP PPP –– Equações LinearizadasEquações Linearizadas
111)(
LLL PDSA
SA
SAA
SAA
SAA
SA
SA vITdtdtcZcYbXaPD +++−+∆+∆+∆=∆
222)(
LLL PDSA
SA
SAA
SAA
SAA
SA
SA vITdtdtcZcYbXaPD +++−+∆+∆+∆=∆
[ ] SA
SALAL
S
SA
SA
SAA
SAA
SAA
SA
SA
LL
LL
vNtt
ITdtdtcZcYbXa
11
11
1010 )()(
)(
φφφλ
λφ
++−+
+−+−+∆+∆+∆=∆
[ ] SA
SALAL
S
SA
SA
SAA
SAA
SAA
SA
SA
LL
lL
vNtt
ITdtdtcZcYbXa
22
12
2020 )()(
)(
φφφλ
λφ
++−+
+−+−+∆+∆+∆=∆

130
PPPPPP
Considera todas as fontes de errosConsidera todas as fontes de erros••Ionosfera Ionosfera
– combinação linear adequada nas duas observáveis
••Troposfera Troposfera – parte é modelada (modelos com parâmetros
padrão) – parte é ajustada num processo recursivo.
••Marés terrestres, Marés terrestres, ••Movimento do polo;Movimento do polo;••Cargas do oceano e da atmosferaCargas do oceano e da atmosfera

131
PPPPPP
••Apresenta grandes potencialidadesApresenta grandes potencialidades– Aplicações em Geodésia e Geodinâmica
••Precisão esperada para 24 horas de dadosPrecisão esperada para 24 horas de dados– poucos milímetros na horizontal– poucos centímetros na vertical
••Não pode ser aplicado em tempo Não pode ser aplicado em tempo real ainda...real ainda...••Necessita de software especiais devido a Necessita de software especiais devido a modelagem das fontes de erros consideradas modelagem das fontes de erros consideradas (GOA(GOA--II)II)

132
PPPPPP••Algumas organizações tem disponibilizado o PPP Algumas organizações tem disponibilizado o PPP onon--lineline, tornando seu uso muito mais popular., tornando seu uso muito mais popular.
••O JPL tem disponibilizado um serviço gratuito O JPL tem disponibilizado um serviço gratuito onon--line “line “Automatic Precise Positioning Service ” . ” . Esse Esse serviço esta disponível atualmente através do seu serviço esta disponível atualmente através do seu site site http://apps.gdgps. net/apps_file_upload.phphttp://apps.gdgps. net/apps_file_upload.php
••As operações no JPL são realizadas de modo As operações no JPL são realizadas de modo automático. automático.
•• Atualmente apenas dados de receptores de dupla Atualmente apenas dados de receptores de dupla frequência no modo pósfrequência no modo pós--processado podem ser processado podem ser analisados.analisados.

133
PPPPPP••OO NRCanNRCan tambémtambém disponibilizadisponibiliza umum serviçoserviço paraparaprocessamentoprocessamento dede dadosdados GNSSGNSS queque utilizautiliza PPPPPP..
••OO serviçoserviço éé gratuito,gratuito, exigindoexigindo apenasapenas umumcadastramentocadastramento dodo usuáriousuário nono sistemasistema..••EsseEsse serviçoserviço estáestá disponíveldisponível viavia CSRSCSRS--PPPPPP ((CSRSCSRS--CanadianCanadian SpatialSpatial ReferenceReference SystemSystem),),
••O O usuariousuario interessado em usar esse serviço deve interessado em usar esse serviço deve acessar o endereço acessar o endereço http://www.geod.nrcan.gc.ca/ http://www.geod.nrcan.gc.ca/ online_data_e.phponline_data_e.php

134
PPPPPP••AlémAlém dessedesse aindaainda temtem osos serviçosserviços desenvolvidodesenvolvido pelapelaUNBUNB ((UniversityUniversity ofof NewNew BrunswickBrunswick)) nono CanadáCanadá..
••NesseNesse serviçoserviço éé possivelpossivel realizarrealizar oo PPPPPP nono modomodoestáticoestático ee nono cinemáticocinemático..
••O usuário interessado em usar esse serviço deve O usuário interessado em usar esse serviço deve acessar o endereço acessar o endereço http://gaps.gge.unb.ca/http://gaps.gge.unb.ca/
••Ou ainda tem um site que apresenta todos os links Ou ainda tem um site que apresenta todos os links para os serviços de PPP para os serviços de PPP onon--lineline. . http://gge.unb.ca/Resources/PPP/OnlinePPPs.htmlhttp://gge.unb.ca/Resources/PPP/OnlinePPPs.html

135
PPPPPP••NoNo BrasilBrasil OO IBGEIBGE--PPPPPP éé umum serviçoserviço onon--lineline gratuitogratuitoparapara oo póspós--processamentoprocessamento dede dadosdados GPSGPS..
••EleEle permitepermite aosaos usuáriosusuários dede GPS,GPS, obteremobteremcoordenadascoordenadas dede boaboa precisãoprecisão nono SistemaSistema dedeReferênciaReferência GeocêntricoGeocêntrico parapara asas AméricasAméricas(SIRGAS(SIRGAS20002000)) ee nono InternationalInternational TerrestrialTerrestrialReferenceReference FrameFrame (ITRF)(ITRF)..
••O usuário interessado em usar esse serviço deve O usuário interessado em usar esse serviço deve acessar o endereço. acessar o endereço. http://www.ppp.ibge.gov.br http://www.ppp.ibge.gov.br /ppp.htm/ppp.htm

136
Posicionamento RelativoPosicionamento Relativo
• O posicionamento relativo busca, através do uso de 2 ou mais receptores, obter as coordenadas desconhecidas de um ponto (ponto remoto ou “rover” ), tomando como referência um ou mais pontos cujas coordenadas são conhecidas (ponto base)

137
Posicionamento RelativoPosicionamento Relativo
BaseBase RemotoRemoto

138
Posicionamento RelativoPosicionamento Relativo
• A idéia básica é que, estando esses dois pontos sujeitos ao mesmos erros, consegue-se, matematicamente, eliminar a influencia desses erros no ponto cujas coordenadas deseja-se conhecer
• Obtém-se inicialmente, os deslocamentos (∆X, ∆Y, ∆Z) do ponto remoto em relação ao ponto base
• A seguir, soma-se esses deslocamentos ás coordenadas do ponto base, obtendo-se assim as coordenadas do ponto remoto (rover)

139
Diluição da Precisão (DOP)Diluição da Precisão (DOP)
• Os diversos DOPs (Dilution of Precision), frequentemente usados em navegação e no planejamento de observações GPS são obtidos a partir do posicionamento por ponto. O DOP auxilia na indicação da precisão dos resultados que serão obtidos. E depende basicamente da configuração geométrica dos satélites.

140
Diluição da Precisão (DOP)Diluição da Precisão (DOP)

141
Diluição da Precisão (DOP)Diluição da Precisão (DOP)
• Os DOPs são uma medida da expectativa da precisão que será obtida em um posicionamento
• O DOP baseia-se na precisão da observação da pseudodistância em um ponto e na configuração geométrica dos satélites, durante o posicionamento

142
Diluição da Precisão (DOP)Diluição da Precisão (DOP)
• Ele é um número adimensional que auxilia no planejamento de missões (especialmente quando existem obstruções) e na estimativa do tempo a ser ocupado nas estações
• Quando menor o valor do DOP (ou seja, quanto menos diluída for a precisão), melhor será a precisão do posicionamento
• Pode-se esperar um posicionamento com boa precisão para valores de PDOP ≤ 4. Para PDOP acima de 7, alguns receptores não gravam as observações dos satélites

143
Diluição da Precisão (DOP)Diluição da Precisão (DOP)
• O DOP pode apresentar diferentes índices:
– HDOP: para posicionamentos horizontais (ɸ,λ)
– VDOP: para posicionamento vertical (h)
– PDOP: para posicionamento tridimensional (ɸ,λ,h)
– TDOP: para determinação de tempo
– GDOP: para efeito combinado de PDOP e TDOP
– RDOP: para posicionamentos relativos

144
•• EstáticoEstático• No posicionamento Estático, dois ou mais
receptores rastreiam, simultaneamente, os satélites visíveis por um período de tempo superior a 20 minutos.
• É a técnica mais utilizada em posicionamentos geodésicos e permite chegar a precisões de 0,1 a 1,0 ppm
• É a técnica mais demorada pois exige a mudança na geometria dos satélites para a resolução da Ambigüidade no processo de ajustamento das observações
Técnicas de Posicionamento Técnicas de Posicionamento RelativoRelativo

145
•• Estático Estático RápidoRápido
• Segue o mesmo processo do Estático, entretanto o período de ocupação das estações é menor, variando de 5 a 20 minutos
• É adequado para levantamentos de linhas de base de até 10 km, tendo sua precisão variando entre 1 a 10 ppm
• O algoritmo do software de processamento deve permitir resolver a ambigüidade para um período pequeno de ocupação

146
•• SemiSemi--CinemáticoCinemático
• Também chamado de Pseudo-Estático, baseia-se no fato de que, para se determinar a ambigüidade, a geometria dos satélites deve alterar
• Assim, a estratégia prescreve que um mesmo ponto seja ocupado por pouco tempo (5 min.), em dois momentos, com intervalo de tempo superior a 30 minutos entre cada ocupação, dando tempo para que os satélites alterem a geometria

147
•• Cinemático Cinemático StopStop--andand--GoGo
• Nesta estratégia cinemática, um receptor permanece no ponto base, enquanto um ou mais receptores se deslocam nos pontos de interesse remotos, permanecendo cerca de 1 min em cada ponto
• Durante o deslocamento entre os pontos de interesse, o receptor deve permanecer ligado e em sintonia com, pelo menos, 4 satélites
• Caso a recepção durante o trajeto entre um ponto e outro se perca, o levantamento deve ser reiniciado no ponto anterior

148
••Cinemático Cinemático StopStop--andand--GoGo
• É uma estratégia precisa, destinada a levantar pontos próximos e que não possuam muitas obstruções entre eles
• Essa estratégia, tradicionalmente, exige que o trabalho se inicie a partir de uma linha-base conhecida, ou seja, dois pontos de coordenadas conhecidas
• Isso busca determinar, no primeiro ponto, o valor da ambigüidade, pois esse ponto possui coordenadas conhecidas, o que permite calcular o valor da ambigüidade no início dos trabalhos

149
Método Cinemático StopMétodo Cinemático Stop--andand--GoGo
• Caso a duração do trabalho venha atingir, continuamente, cerca de 20 a 30 minutos, é possível solucionar a ambigüidade com o conjunto de observações armazenadas durante as trajetórias
• Essa solução de ambigüidade é chamada de Solução On-the-Fly (OTF)
• Isso evita que seja necessário o início em um ponto de coordenadas conhecidas
• E um método cujos dados são pós-processados

150
•• Cinemático Cinemático ContínuoContínuo
• É a mesma estratégia do Cinemático Stop-and-Go, entretanto as feições levantadas são do tipo Linha, e não do tipo Ponto
• É útil no levantamento preciso de Estradas, Cursos d´Água, Contornos etc.

151
••RTK RTK ((RealReal--TimeTime--KinematicKinematic))
• O posicionamento RTK (Real-Time-Knematic) é semelhante ao DGPS, com as seguintes diferenças:
– A observável utilizada é a Fase da Onda Portadora
– A precisão fica na faixa de poucos centímetros
– A distância base-rover deve ser menor do que 5 km (dependendo da freqüência do link de rádio e das condições topográficas do local)

152
Método RTK Método RTK ((RealReal--TimeTime--KinematicKinematic))

153
OO receptorreceptor dodo usuáriousuário devedeve dispordispor dede softwaresoftware adequadoadequadoparapara oo processamentoprocessamento emem tempotempo realreal comcom soluçãosolução dadaambiguidadeambiguidade quasequase instantâneainstantânea..
NoNo RTKRTK,, devidodevido aosaos erroserros envolvidosenvolvidos nono processoprocesso(ionosfera(ionosfera ee troposfera),troposfera), seremserem proporcionaisproporcionais aoaocomprimentocomprimento dada linhalinha dede basebase,, aa distânciadistância entreentre aaestaçãoestação basebase ee oo usuáriousuário éé restringidarestringida..
Método RTK Método RTK ((RealReal--TimeTime--KinematicKinematic))Método RTK Método RTK ((RealReal--TimeTime--KinematicKinematic))
Estação Estação BaseBase
Estação Estação MóvelMóvel
Link de ComunicaçãoLink de ComunicaçãoRTCMRTCMRTCMRTCM
ℎ

154
Dados de uma rede de estações de ReferênciaDados de uma rede de estações de Referência
EstimaEstima--se se os erros das observáveis em cada uma dessas os erros das observáveis em cada uma dessas estaçõesestações
Através de um método de interpolação apropriado determinaAtravés de um método de interpolação apropriado determina--seseo erro para qualquer local na área de abrangência da redeo erro para qualquer local na área de abrangência da rede
TransmiteTransmite--se ao usuário os parâmetros de correção da se ao usuário os parâmetros de correção da rede rede
O O usuário poderá realizar posicionamento com acurácia centimétricausuário poderá realizar posicionamento com acurácia centimétrica
VRS é uma das formas utilizada para disponibilizar as correções VRS é uma das formas utilizada para disponibilizar as correções obtidas da redeobtidas da rede
As correções podem ser fornecidas em RTCM: As correções podem ser fornecidas em RTCM: VV2.32.3, V, V3.03.0e Ve V3.13.1
Método RTK Método RTK em Redeem RedeMétodo RTK Método RTK em Redeem Rede

155
VRSVRS
ParaPara gerargerar aa VRSVRS éé necessárionecessário transformartransformar osos dadosdados dede umaumaestaçãoestação real,real, deslocandodeslocando osos termostermos dada equaçãoequação dedeobservaçãoobservação dependentesdependentes dada localizaçãolocalização parapara aa novanova posiçãoposição
AA partirpartir dasdas observáveisobserváveis dada base,base, fasefase ee pseudodistância,pseudodistância, eedosdos erroserros atmosféricos,atmosféricos, sãosão geradosgerados asas observáveisobserváveis dada VRSVRS
EquaçãoEquação dada fasefase parapara umauma estaçãoestação realreal AA::
EquaçãoEquação dada fasefase parapara umauma estaçãoestação VirtualVirtual::
CalculandoCalculando aa diferençadiferença entreentre asas equaçõesequações anterioresanteriores éé obtidoobtido oodeslocamentodeslocamento dada estaçãoestação realreal parapara aa VRSVRS::
Método RTK Método RTK em Redeem RedeMétodo RTK Método RTK em Redeem Rede

156
OsOs modelosmodelos sãosão idealizadosidealizados semsem considerarconsiderar osos erroserros dedeórbita,órbita, ionosferaionosfera ee troposferatroposfera
TaisTais erroserros podempodem serser representadosrepresentados pelopelo termotermo::
Analogamente,Analogamente, aa observávelobservável parapara aa VRSVRS podepode serser obtidaobtida::
VRSVRSVRSVRS
157
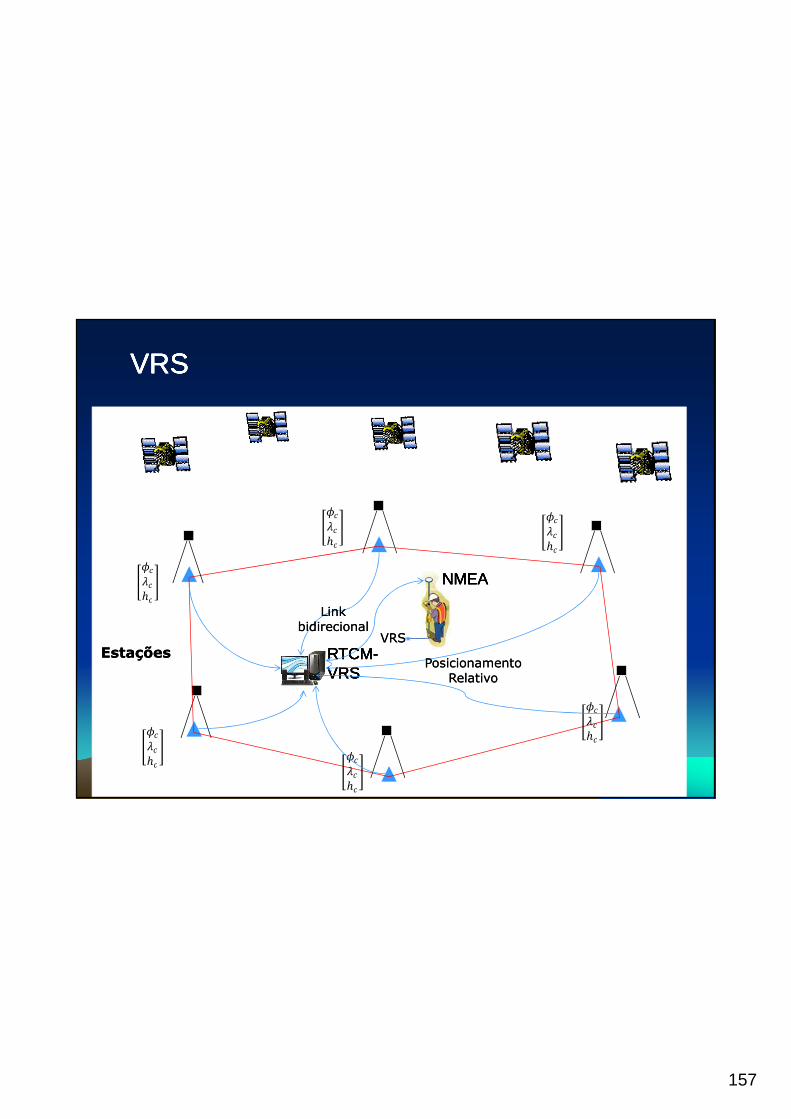
EstaçõesEstações RTCMRTCM--VRSVRSRTCMRTCM--VRSVRS
ℎ
ℎ
ℎ ℎ
ℎ
ℎ
NMEANMEANMEANMEA
Link Link
bidirecionalbidirecionalVRSVRS
Posicionamento Posicionamento
RelativoRelativo
VRSVRSVRSVRS

158
Método DGPSMétodo DGPS
• No DGPS (Diferencial GPS), um receptor dotado de um link de rádio permanece instalado em um ponto de coordenadas conhecidas (base)
• Outro receptor, também dotada do link de rádio, ocupa as estações cujas coordenada deseja-se determinar e recebe da base, em tempo real, as correções diferenciais, baseadas na observável pseudodistância.

159
Método DGPSMétodo DGPS
• Dessa forma, é possível obter, com precisão de 1 a 5 metros, as coordenadas dos pontos no momento da ocupação
• A distância entre a base e o rover pode chegar, de maneira ideal, a 200 km .

160
Método WADGPSMétodo WADGPS
• Significa Wide Area DGPS, e foi desenvolvido de forma a evitar um grande número de estações para correções diferenciais
• Utiliza satélites de comunicação para envio das correções diferenciais, ampliando a área de abrangência.
• Os dados são contratados por períodos determinados (6 meses, 1 ano etc.)
• Ex.: OMNISTAR, Racal, LandStar.

161
DGPS HP DGPS HP –– High Precision High Precision
• A OMNISTAR está disponibilizando, para algumas regiões do mundo, um serviço de correção diferencial em tempo real com acurácia em torno de 10 cm (Confiabilidade = 98%).
• Esse serviço exige um receptor de dupla freqüência (L1/L2), compatível com o padrão Omnistar. Por enquanto, apenas o modelo Pro-Pak, para Topografia/GIS, da Novatel (comercializado pala Sokkia), aceita este padrão.
• No Brasil, apenas a faixa costeira já é atendida pela empresa (Julho/2004)

162
Posicionamento Geodésico Posicionamento Geodésico pelo NAVSTARpelo NAVSTAR--GPSGPS
ERROS NO POSICIONAMENTO GPS
Curso de Capacitação em GPS

163
As Observáveis GPSAs Observáveis GPS
• São duas as observáveis principal, que permite determinar a posição do receptor GPS:
- A Pseudodistância
- A Fase da onda portadora
• Quando o posicionamento é realizado utilizando a Pseudodistância, diz-se que é um “Posicionamento pelo Código”, quando é utilizada a onda portadora, diz-se que é um “Posicionamento pela Fase”

164
Modelos matemático das observáveis GPSModelos matemático das observáveis GPS
• Equação para a pseudo-distância
• Equação para a fase da portadora
PD c dt dt I T v
PD c dt dt I T v
r
s
r
s
r
s
r
s
r
s
PD
r
s
r
s
r
s
r
s
r
s
PD
1
2
1
2
= + − + + +
= + − + + +
ρ
ρ
[ ]
[ ]
220202
222
10101
111
)]()([
][*)(
)]()([
][*)(
1
φ
φ
φφ
ρφ
φφ
ρφ
vNtt
dtdtfc
TIf
vNtt
dtdtfc
TIf
s
tr
rs
sr
sr
srs
r
s
tr
rs
sr
sr
srs
r
++−
+−++−=
++−
+−++−=

165
A PseudodistânciaA Pseudodistância
• A Pseudodistância é a medida entre a antena do receptor e o satélite, obtida a partir do tempo (∆t) de propagação do sinal
• Este tempo de propagação é obtido através da correlação do Código gerado no Satélite com uma réplica gerada no receptor

166
A Fase da Onda PortadoraA Fase da Onda Portadora
• Esta observável é obtida através da diferença entre a fase da onda recebida no receptor e aquela gerada internamente no mesmo.
• É uma observável muito mais precisa do que a pseudodistância.
• É a observável principal utilizada nos
posicionamentos geodésicos.

167
A Fase da Onda PortadoraA Fase da Onda Portadora
• Para a determinação da distância receptor-satélite, deve-se determinar, ainda, o número de ciclos completos de onda entre os mesmos
• Este número é chamado de Ambigüidade, e pode ser obtido por várias maneiras, todas elas computacionais ou estatísticas
• Para a determinação da Ambigüidade, é necessária a mudança da geometria dos satélites durante o posicionamento, além de um número maior de observações coletadas .

168
A Fase da Onda PortadoraA Fase da Onda Portadora
Ambigüidade
Inteira
D1 = Fp1+ Fc1 + n λ
D2 = Fp2+ Fc2 +(n+a)λ
D3 = Fp3+ Fc3 +(n+b)λ
tt11
tt22tt33
Fc
Fp
λ
CicloCiclo FaseFase

169
Os Tipos de Erros de Medida Os Tipos de Erros de Medida
• Um posicionamento GPS, tal como outras medidas, estão sujeitas a diversos tipos de erros. São eles:
-Sistemáticos: Podem ser modelados ou eliminados por técnicas adequadas
-Aleatórios: Não apresentam nenhuma relação funcional com as medidas, sendo, entretanto, inerente a elas. Eles são tratados como resíduos no processo de ajustamento
-Grosseiros: Interferem diretamente nos resultados e, algumas vezes, podem ser detectados após o processamento

170
Os Erros no Posicionamento GPSOs Erros no Posicionamento GPS
• Diversos são os erros existentes nas observáveis utilizadas nos posicionamentos GPS.
• A maioria deles, entretanto, pode ser adequadamente eliminada, reduzida ou evitada.
• Os principais erros, que afetam os posicionamentos geodésicos de precisão, são abordados a seguir.

171
Os Erros no Posicionamento GPSOs Erros no Posicionamento GPS
Erros no sinal GPSErros no sinal GPS
22-- Erro do relógioErro do relógio11-- Erro de órbitaErro de órbita
Ionosfera Ionosfera CintilanteCintilante
IonosferaIonosfera Troposfera Troposfera CintilanteCintilante
55-- MulticaminhoMulticaminho
TroposferaTroposfera
ReceptorReceptor

172
CONTRIBUIÇÕES DOS ERROS GPS NACONTRIBUIÇÕES DOS ERROS GPS NAMEDIDA DA PSEUDODISTÂNCIAMEDIDA DA PSEUDODISTÂNCIA
OsOs efeitosefeitos combinadoscombinados dosdos erros,erros, quandoquando projetadosprojetados sobresobre aa linhalinhaqueque ligaliga asas antenasantenas dodo receptorreceptor ee dodo satélite,satélite, denominadenomina--sese UEREUERE ((UserUserEquivalentEquivalent RangeRange ErrorError),), queque representarepresenta oo erroerro esperadoesperado nanaobservaçãoobservação.. AlgunsAlguns receptoresreceptores mostrammostram oo UEREUERE dede cadacada satélitesatélite..
Fontes de Erros Erros típicos (m, 1σ) SPS com satélites
II/IIA PPS com satélites
II/IIA SA Propagação do Sinal
Ionosfera Troposfera
Relógio e Efemérides Receptor Multicaminhamento
24,0
7,0 0,7 3,6 1,5 1,2
0,0
0,01 0,7 3,6 0,6 1,8
Total UERE 25,3 4,1

173
Erro OrbitalErro Orbital
• É o erro devido á diferença entre a órbita prevista e a efetivamente realizada pelo satélite, que envia, nas mensagens de navegação, os parâmetros orbitais previstos
• Atualmente este erro é de cerca de 1 m nas Efemérides Transmitidas, tendo chegado a 20 m há alguns anos.
• Esse erro é bastante reduzido no posicionamento relativo, sendo proporcional ao comprimento da linha-base.

174
Erro OrbitalErro Orbital
• Para um erro orbital de 2,6 m, em uma linha base de 10 km, pode-se esperar um erro no comprimento da linha-base de cerca de 1,3 mm
• Para 50 km, este erro chegará a 6,5 mm
• Em posicionamentos de precisão, a estratégia é utilizar Efemérides Precisas
• Nesse caso, em 50 km de linha-base, utilizando-se Efemérides Precisas IGS (± 5 cm), o erro será da ordem de 0,125 mm !

175
ERROS RELACIONADOS COM OS SATÉLITES ...ERROS RELACIONADOS COM OS SATÉLITES ...• Efemérides transmitidas (ET)
– Acurácia: 2 a 10 m e disponíveis em tempo real.
• Efemérides precisas (EP) (IGS), rápidas (IGR) e ultra-rápida (IGU)– Acurácia estimada de 5, 10 e 20 cm respectivamente
– IGS (uma semana), IGR (dois a três dias), IGU (tempo real).
EFEMÉRIDE Erro Orbital ∆r(m)
Comprimento da linha de base b
(km)
Erro na base ∆b(cm)
Acurácia relativa
∆b/b(ppm)
ET
10
10 100 1000 5000
0,5 5 50 250
0,5
ET
2
10 100 1000 5000
0,1 1 10 50
0,1
EP (IGU)
0,2
10 100 1000 5000
0,1 1 10 50
0,01
EP (IGS)
0,05
10 100 1000 5000
0,01 0,1 1 5
0,01
Efeitos dos Erros Orbitais nas Linhas de BaseEfeitos dos Erros Orbitais nas Linhas de Base

176
Erros de Propagação do SinalErros de Propagação do Sinal
• Durante a propagação dos sinais, dos satélites até o receptor, eles atravessam diversas camadas, sofrendo deferentes influências, provocando variações na direção e velocidade de propagação, e na polarização e potência.
• As camadas onde ocorrem os principaisfenômenos de interesse do posicionamento GPSsão a Troposfera e a Ionosfera
• Nessas camadas, ocorrem Refração dos sinaistransmitidos pelo GPS

177
Erros de Propagação do SinalErros de Propagação do Sinal

178
Erro da Refração Troposférica Erro da Refração Troposférica
• A Troposfera é a camada que vai da superfície da Terra até aproximadamente 50 km de altura
• Nessa camada, sinais de freqüência diferentes sofrem os mesmos efeitos da Refração (meio não-dispersivo refração não depende da freqüência)
• Esse efeito pode variar de 2,3 m, no zênite, até 20m, próximo do horizonte (10°) na observável adotada e depende da Densidade da Atmosfera e do Ângulo de Elevação dos Satélites

179
Erro da Refração TroposféricaErro da Refração Troposférica
• A massa gasosa presente nesta camada é divida em componentes seca e úmida
• A componente seca responde por aproximadamente 90% do efeito da refração e é a única que pode ser obtida através de Modelos Matemáticos
• Esses modelos consideram a Temperatura, a Pressão Atmosférica e o ângulo de elevação do satélite, dentre outros parâmetros, para obter um valor razoável para a Refração Troposférica

180
Erro da Refração TroposféricaErro da Refração Troposférica
• Quanto MENOR o ângulo de elevação do satélite, MAIOR será a Refração Troposférica presente no sinal
• Para reduzir o efeito desse erro, as estratégicas consistem em:
- Especificar uma máscara de elevação, que desconsidera as observações de satélites abaixo de determinada elevação. Normalmente entre 10°e 15°
- Utilizar um modelo matemático consistente no processamento dos dados GPS. Em alguns programas comerciais esse modelo é único e já é considerado no processamento

181
REFRAÇÃO TROPOSFÉRICAREFRAÇÃO TROPOSFÉRICA......• Grafico considerando:
– Pressao 1000 mb
– Temperatura 250
– Pressao Parcial Vapor D’agua 13 mb
• Mais critico para componentevertical
• Efeito similar para estacoesproximas (regioes planas)– A maioria dos efeitos fica
eliminada no processodiferencial
• Na pratica, adota-se um angulominimo de elevacao, a partir doqual o satelite passara a serrastreado– Em geral, 150 (cut off)
Refracao Troposferica
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80
Angulo Elevecao
Ref
raca
o (m
)

182
Erro da Refração TroposféricaErro da Refração Troposférica• A coleta de informações de Temperatura e Pressão
no local do rastreamento não melhora osresultados, visto que elas não representam ocomportamento da atmosfera ao longo do percursodo sinal na camada da Troposfera.
• Assim, pode ser melhor utilizar os valores atmosféricos padrões do que os valores locais.
15° 15°

183
Erro da Refração IonosféricaErro da Refração Ionosférica
• A Ionosfera é a camada que vai de 50 km a 400 km acima da superfície terrestre

184
Erro da Refração IonosféricaErro da Refração Ionosférica
• Nessa camada, sinais de freqüências diferentes sofrem diferentes efeitos da Refração (meio dispersivo refração depende da freqüência)
• O efeito da Refração é proporcional ao TEC (Total Electron Contents)
• Em função dessa característica, posicionamentos utilizando receptores de dupla freqüência podem eliminar o efeito da ionosfera, especialmente em bases longas ( acima de 20 km).

185
Erro da Refração IonosféricaErro da Refração Ionosférica
• Em bases curtas (< 20 km), o posicionamento relativo é suficiente para eliminar este erro. Neste caso, o uso de receptores de monofreqüência é suficiente para obtenção de precisão geodésica.

186
Erro da Refração IonosféricaErro da Refração IonosféricaEm Bases Longas, D<>dEm Bases Curtas, d=d
Ionosfera
Troposfera
Ddd

187
Erro da Refração IonosféricaErro da Refração Ionosférica
• Apesar de não oferecerem alta precisão, é possível utilizar Modelos Matemáticos aproximados para obter o comportamento da Refração Ionosférica, como o de Klobuchar, que reduz em cerca de 50 % os erros ionosféricos.
• Dessa forma, em bases acima de 20km, onde são empregados receptores de monofreqüência, o uso de Modelos Matemáticos pode reduzir os efeitos da ionosfera (segundo alguns fabricantes, até 35-50 km)

188
Erro da Refração IonosféricaErro da Refração Ionosférica
• O IGS disponibiliza, também, um modelo global da ionosfera no formato IONEX (Ionophere Exchange Format).
• O Brasil está, quase todo, em uma região de alta atividade ionosférica. Esta atividade é maior de Setembro a Março e uma hora após o pôr-do-sol até a meia-noite.

189
Mapa da distribuição do TEC em 07 de Junho de 2006
A refração ionosférica é proporcional ao Conteúdo Total de Elétrons (TEC), ou seja, ao número de elétrons presentes ao longo do caminho percorrido pelo sinal, entre o satélite e o receptor.
Mapas diários e em tempo real: http://iono.jgl.nasa .gov//

190
Regiões com Alta Atividade Ionosférica

191
Erro do Multicaminhamento
• Ocorre quando o receptor recebe, além do sinal vindo diretamente do satélite, um sinal refletido em superfícies vizinhas a antena ou multicaminho (Multipath), tais como:
– Construções (casas, edifícios, muros coberturas)
– Carros
– Árvores
– Massa d`água
– Pavimentos (asfalto, concreto etc.)
• É um dos principais erros no posicionamento GPS

192
Erro do Multicaminhamento

193
Erro do Multicaminhamento
• O sinal refletido apresenta distorções na fase da onda e na modulação sobre ela, afetando a qualidade do posicionamento
• Os erros máximos devidos ao Multicaminhamento ficam na faixa de ¼ do comprimento da onda (4,8 cm para L1)
• Satélites mais baixos provocam mais erros de Multicaminhamento
• Antenas com plano de terra e antenas choke ringsreduzem o efeito.

194
Erro do Multicaminhamento
• As estratégias sugeridas para reduzir o erro do Multicaminhamento são:
– Evitar posicionamentos em locais propícios á ocorrência de erro
– Utilizar antenas capazes de reduzir o efeito
– Estabelecer máscara de elevação dos satélites

195
Erro da Perda de Ciclos
• Assim que um receptor GPS é ligado, inicia-se um contador de ciclos da onda portadora. A interrupção desse contador é chamado de Perda de Ciclos e é devido a algum tipo de
• Os motivos podem ser:
– A presença de árvores, construções, montanhas
– Aceleração da antena
– Variações bruscas na atmosfera
– Interferências de outras fontes de rádio
– Problemas no receptor e software

196
Erro da Perda de Ciclostt11
tt22
tt33

197
Erro da Perda de Ciclos
• A correção da perda de ciclos (cicle slip fixing) em alguns casos é possível, empregando estratégias numéricas e computacionais
• Entretanto, caso ocorram diversas perdas de ciclo, poderá ser impossível sua correção e, assim, o posicionamento poderá estar comprometido.
• Durante os posicionamentos, deve-se, então, atentar para a possibilidade de ocorrência desse erro e evitá-lo.

198
Erro do Centro de Fase da Antena
• O centro de fase eletrônico da antena é o ponto no
qual as medidas dos sinais são referenciadas
Gráfico com os pontos de referência da antenaGráfico com os pontos de referência da antena
Alturas dos centros de fase da antena sobre o ponto Alturas dos centros de fase da antena sobre o ponto de referência da estação.de referência da estação.
199
Erro do Centro de Fase da Antena
• O centro geométrico da antena, no entanto, geralmente não coincide com o centro de fase.
• Devido a esta diferença é que ocorre o Erro de Centro de Fase da Antena.
• Antenas de fabricantes e/ou modelos diferente possuem discrepâncias entre o centro de fase e o centro geométrico também diferentes

200
Erro do Centro de Fase da Antena
• As estratégias a serem adotadas em posicionamento de precisão são as seguintes:
– Empregar antenas de mesmo fabricante e modelo
– Utilizar antenas com alta estabilidade do centro de fase
– Direcionar as antenas para uma mesma direção (Norte Magnético, por exemplo), a fim de possibilitar a eliminação do erro no posicionamento Relativo

201
Erro do Centro de Fase da Antena
Centro mecânico
Plano terrestre da antena
Ponto de referência da antena
Centro de fase eletrônico médioVariações do Centro de Fase

202
Erro das Coordenadas da Estação
• Posicionamento Gps de precisão fornecem diferenças tridimensionais de coordenadas (∆X, ∆Y, ∆Z) a partir da estação base
• Caso algum erro seja cometido na especificação das coordenadas da estação base, esse erro irá se propagar para os pontos determinados a partir dele

203
Erro das Coordenadas da Estação
• Esses erros podem ser devidos a:
– Valores incorretos de coordenadas: leitura, digitação, informação, origem, falta de ajustamento
– Transformação incorreta entre Sistemas de Referência e Datuns
• Deve-se observar que, uma vez que as coordenadas da estação base estejam incorretas, as próprias diferenças relativas (∆X, ∆Y, ∆Z) também estarão afetadas.

204
Conversão SAD-69/WGS-84
• Os valores oficiais (IBGE) para a conversão de coordenadas entre os Sistemas de Referência SAD-69 e WGS-84 são os seguintes:
XSAD-69 = XWGS-84 - 66,87 m
YSAD-69 =YWGS-84 + 4,37 m
ZSAD-69 = ZWGS-84 - 38,52 m
• O Elipsóide do SAD-69 (International 1967) tem os seguintes parâmetros definidores:
a = 6.378.160 m
f = (a-b)/a =1/298,25

205
Outras Correções
• Dependendo da finalidade do posicionamento (deriva continental, estudos científicos), devem ser levados em consideração também os efeitos de:
– Marés Terrestres : até 40 cm próximo ao Equador
– Movimento do Pólo :até 25 mm na radial
– Carga dos Oceanos : até 10 cm vertical
– Carga da Atmosfera : até 10 mm

206
Ordem de Grandeza dos Erros
ORIGEM DO ERRO ABSOLUTO
PSEUDO-DISTÂNCIA
RELATIVO
PSEUDO-DISTÂNCIA
Relógio Satélite 1 m
Efemérides Satélite 1 m
S/A 10 m
Troposfera 1 m
Ionosfera 10 m
Ruído na Pseudo-Dist. 1 m 1 m
Ruído no Rceptor 1 m 1 m
Multicaminhamento 0,5 m 0,5 m
RMS 15,5 m 1,6 m
RMS*PDOP =2 31 m 3,2 m

207
Posicionamento Geodésico Posicionamento Geodésico pelo NAVSTARpelo NAVSTAR--GPSGPS
MODELOS MATEMÁTICOS BÁSICOS DO
PROCESSAMENTO GPS
Curso de Capacitação em GPS

208
Equações das Observações GPSEquações das Observações GPS
• Cada observação gravada no receptor GPS irá gerar uma equação para a obtenção da distância receptor-satélite e, em seguida, as coordenadas do receptor (antena)
• As equações, para a Pseudodistância e a Fase da Onda Portadora, para a L1, são apresentadas a seguir:

209
Equações das Observações GPSEquações das Observações GPS
• Pseudodistância na L1:
Fase da Onda Portadora na L1:

210
Combinações das Observáveis Combinações das Observáveis GPS em uma Única EstaçãoGPS em uma Única Estação• AS combinações lineares dos sinais
visam obter novas “observáveis” com características úteis em determinados procedimentos computacionais e numéricos
• Algumas das combinações lineares importantes nos processamentos GPS são:
2211 φφ mmCLi += 2211 φφ mmCLi +=
2211 φφ mmCLi +=

211
Combinações lineares das observáveis GPSCombinações lineares das observáveis GPS
C L m mi = +1 1 2 2φ φC L m mi = +1 1 2 2φ φC L m mi = +1 1 2 2φ φ
σ σm m Lm m1 2 1
222
1= +
Observável m1 m2 ≅λ m m1 2(cm) σ m m1 2
(mm)
L0 f f f12
12
22/ ( )− − −f f f f1 2 1
222/ ( )
19,0 9,0L1 1 0 19,0 3,0L2 0 1 24,0 3,9L∆ 1 -1 86,2 19,4LΣ 1 1 10,7 2,4
L43 4 -3 11,4 9,1L54 5 -4 10,1 10,3

212
Combinações das Observáveis Combinações das Observáveis GPS em uma Única EstaçãoGPS em uma Única Estação
• L0 = Combinação livre da Ionosfera (ionospheric free observable ).
– Nesta combinação, os efeitos da ionosfera são sensivelmente reduzidos
– É a combinação normalmente utilizada em posicionamento geodésicos de alta precisão, envolvendo bases longas
– Se usada em bases curtas, essa combinação acaba provocando ruídos que não indicam sua utilização

213
Combinações das Observáveis Combinações das Observáveis GPS em uma Única EstaçãoGPS em uma Única Estação
• L∆ = Banda Larga (Wide Lane)
– Esta combinação, em conjunto com a L0 é útil na etapa de detecção de perdas de ciclos e erros grosseiros (outliers)
– O seu maior comprimento de onda a torna importante nos problemas de resolução da ambigüidade

214
Combinações das Observáveis Combinações das Observáveis GPS em uma Única EstaçãoGPS em uma Única Estação
• LΣ = Banda Estreita (narrow lane)
– Apresenta o menor ruído de todas as combinações
– Devido ao seu pequeno comprimento de onda, o seu uso na resolução da ambigüidade é difícil
– Esta combinação, subtraída da L∆ é chamada de sinal ionosférico, pois contém todos os efeitos da ionosfera, permitindo uma analise do comprimento da ionosfera e é útil na resolução da ambigüidade

215
Combinações das Observáveis Combinações das Observáveis GPS em uma Única EstaçãoGPS em uma Única Estação
• Filtragem da Pseudodistância pela Fase da onda Portadora
-Chamado de “Suavização da Pseudodistância pela Portadora” ou Suavização do Código pela Fase”
-A Pseudodistância filtrada pela fase da onda portadora torna-se muito mais precisa
-O algoritmo torna se sensível á Perda de Ciclos
-Utilizado em alguns receptores L1 (ex.:Trimble Pro-XR, Leica GS-20 )

216
Combinações das Observáveis Combinações das Observáveis GPS entre Diferentes EstaçõesGPS entre Diferentes Estações
• Posicionamento relativo ou Diferencial é aquele que envolve, ao menos, 2 receptores ligados simultaneamente, sendo um deles rastreando em um ponto de coordenadas conhecidas (Ponto Base) e outro em um ponto cujas coordenadas deseja-se conhecer (ponto Remoto ou Rover)

217
Combinações das Observáveis Combinações das Observáveis GPS entre Diferentes EstaçõesGPS entre Diferentes Estações• No processamento do Posicionamento Relativo são
realizadas combinações de observáveis entre estações
• Uma vantagem do Posicionamento relativo é que os Erros presentes nas observações originais são reduzidos quando se formam as diferenças entre as observáveis das estações
• Essas observáveis secundárias são comumente chamadas de Simples, Dupla e Tripla Diferença

218
Combinações das Observáveis Combinações das Observáveis GPS entre Diferentes EstaçõesGPS entre Diferentes Estações
• Simples Diferença: cancelam-se os erros dos relógios dos satélites;
• Dupla Diferença: cancelam-se os erros dos relógios dos satélites e dos receptores;
• Tripla Diferença: cancelam-se os erros dos relógios dos satélites, dos receptores e as ambigüidades.

219
Simples DiferençaSimples Diferença
– Podes ser formadas entre 2 receptores, 2 satélites ou 2 épocas

220
Simples DiferençaSimples Diferença
– Nesta observação, o erro do relógio do satélite (dts) é eliminado
– Também os erros devidos ás posições dos satélites (erro orbital) e á refração atmosférica são minimizados, especialmente em bases curtas, onde os efeitos da ionosfera e troposfera são similares em cada estação
– Para bases Longas, a refração troposférica pode ser modelada e a ionosférica pode ser reduzidapelo uso da combinação linear L0 (caso em que se necessita de um receptor de dupla freqüência)

221
Dupla DiferençaDupla Diferença
– É a diferença entre duas simples diferenças.
– Envolve, portanto, dois receptores e dois satélites

222
Dupla DiferençaDupla Diferença
– Na Dupla Diferença, os erros dos relógios dos receptores (dtr1 e dtr2 ) são eliminados
– É a combinação preferida nos processamentos de dados GPS envolvendo a fase da onda portadora
– É a que oferece a melhor relação entre o rúido resultante da combinação e a eliminação de erros sistemáticos envolvidos nas observáveis originais

223
Tripla DiferençaTripla Diferença
– É dada pela diferença entre duas duplas diferenças, envolvendo os mesmos receptores e satélites, mas em épocas distintas (t1 e t2)
– Na Pseudodistância, não oferece nenhuma vantagem em relação às anteriores. Entretanto, para a Fase da Onda Portadora, a Ambigüidade é eliminada
– Essa observável é bastante sensível à perda de ciclos. Por isso, é muito utilizada em sua detecção na fase de pré-processamento dos ciclos.
– Não é utilizada, normalmente, na solução final

224
Considerações sobre os modelosConsiderações sobre os modelos
• A maioria dos programas comerciais de processamento de dados GPS utiliza as Duplas Diferenças como observável básica. Ex: Prism, Ashtech Solutions, Trimple GPS Survey,
• Já os programas científicos (GIPSY, DIPOP, BERNESE etc.) utilizam as observáveis originais, exigindo maior tempo e recurso computacional
• Quando o tratamento matemático é adequado,ambos proporcionam os mesmos resultados

225
Posicionamento Geodésico Posicionamento Geodésico pelo NAVSTARpelo NAVSTAR--GPSGPS
PLANEJAMENTO, COLETA E PROCESSAMENTO GPS
Curso de Capacitação em GPS

226
PlanejamentoPlanejamento
• RBMC,RIBAC: Verificar disponibilidade de Rede Ativas que atendam a região dos pontos a serem levantados
• Obstruções: Verificar existência, se podem ser removidos ou cadastrá-las
• Obter Efemérides e realizar planejamento da Missão: dias e horário mais adequados (melhores PDOPs)

227
PlanejamentoPlanejamento
• Precisão e Método: Definir a precisão requerida e o método adequado para atingí-la
• Equipamentos: Verificar especificação dos receptores necessária para realização completa de serviço:
– Sinais processados: L1, L1/L2
– Memória: Capacidade/Descarregamento
– Bateria: Autonomia/Recarga
– Coletor de Dados

228
PlanejamentoPlanejamento
• Marcos: Pesquisar marcos geodésicos próximos e/ou de fácil acesso.
• Determinar distância entre base e pontos remotos e tempo mínimo de coleta
• Obter coordenadas precisas e recém –ajustadas do Marco Geodésico de Partida
• Programa utilizado Ex.: Mission Planning Ashtech
• Site para baixar almanac
– http://products.thalesnavigation.com/en/support/almanac.asp
– ftp://ftp.thalesnavigation.com/almanacs/

229
PlanejamentoPlanejamento

230
PlanejamentoPlanejamento

231
PlanejamentoPlanejamento
• Figua P A

232
PlanejamentoPlanejamento

233
PlanejamentoPlanejamento

234
Coleta de DadosColeta de Dados
• Configurar Taxa de Gravação (5,10,15, 20s), Máscara de Elevação (10°, 15°), Tempo de Coleta
• Definir estratégias de levantamento: Estático + Cinemático, Cinemático + Levto. Topogáfico
• Anotar altura das antenas, elaborar croquis
• Descarregar dados no Software de Processamento

235
Processamento dos DadosProcessamento dos Dados
• Cuidar da correta conversão de datuns (SAD-69WGS-84) e coordenadas (LAT.LONG
UTM). Observar parâmetros oficiais do IBGE
• Selecionar adequado algoritmo de processamento (L1, L1+L2 etc.)
• Selecionar tipo de solução da Ambigüidade: FLT (Floating) ou FIX (Fixed)
• Verificar Erro Médio Quadrático (RMS) e a taxa de Confiabilidade (RATIO) do resultado

236
236236
Posicionamento Geodésico Posicionamento Geodésico pelo NAVSTARpelo NAVSTAR--GPSGPS
REFERÊNCIAS
Curso de Capacitação em GPS

237
237237
Bibliografia IndicadaBibliografia Indicada• Monaco, João Francisco Galera. Posicionamento
pelo GNSS ed. Unesp 2008.
• Monaco, João Francisco Galera. Posicionamento pelo NAVSTAR-GPS ed. Unesp 2000.
• Seeber, Gunter. Satellite Geodesy , Walter de Gruyter.
• Leick, Alfred. GPS Satellite Surveying , WileyInterscience

238
238238
Revistas EspecializadasRevistas Especializadas
• Revista InfoGNSS: www.mundogeo.com.br
• Revista InfoGEO: www.mundogeo.com.br
• Revista MIRA: www.amiranet.com.br
• Revista GPS World: www.gpsworld.com

239
InternetInternet
• IBGE: www.ibge.gov.br.
• INCRA: www.incra.gov.br
• IGS: http://igs.jpl.nasa.gov/

240
BibliografiaBibliografia• BLITZKOW, D. Navstar/GPS: um desafio tornado realidade. In: SIMPÓSIO BRASILEIRO DE
GEOPROCESSAMENTO, 3, 1995, São Paulo. Anais. São Paulo, 1995.
• HOFMANN-WELLENHOF,B. , LICHTENEGGER, H. e COLLINS, J. 1997. Global Positioning System: theory and practice. Springer Wien New YorK. p.386.
• LETHAM, L. GPS Made easy: using global positioning systems in the outdoors. Seattle: Published by The Mountaineers, 1996. p 112.
• Aplicação do Sistema de Posicionamento Global (GPS) na Coleta de DadosJ.V.E. Bernardi e P.M.B. Landim 31
• MONICO, J.F.G. 2000. Posicionamento pelo NAVSTAR-GPS: descrição, fundamentos e aplicações. São Paulo: Editora UNESP, p287.
• SEEBER, G. Satellite geodesy: foundations, methods and applications. Berlin, New York: Walter de Gruyter,1993. p 356.
• SEGANTINE, P. C. L. 1999. GPS – Sistema de Posicionamento Global. Apostila didática da Universidadede São Paulo Escola de Engenharia de São Carlos, Departamento de Transportes. p 181.
• BERNARDI, J.V.E. & LANDIM, P.M.B. Aplicação do Sistema de Posicionamento Global (GPS) na coleta de dados. DGA,IGCE,UNESP/Rio Claro, Lab. Geomatemática,Texto Didático 10, 31 pp. 2002.
• PAULA,V. F. de. 2005. Curso de Formação Continuada em Georreferenciamento de Imóveis Rurais. Apostila . CEFET-GO,Coordenação de Geomática, Goiás p 81.





























