Embed Size (px)
Citation preview

This article was downloaded by: [University of Southern Queensland]On: 05 October 2014, At: 06:15Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
Behaviour & Information TechnologyPublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tbit20
Anticipatory movement compatibility for virtual realityinteraction devicesSarah Lukas a , Henning Brau b & Iring Koch aa Institute of Psychology, RWTH Aachen University , Jägerstrasse 17–19, 52066, Aachen,Germanyb Daimler AG, Research and Technology , 89013, Ulm, GermanyPublished online: 24 Feb 2009.
To cite this article: Sarah Lukas , Henning Brau & Iring Koch (2010) Anticipatory movement compatibility for virtual realityinteraction devices, Behaviour & Information Technology, 29:2, 165-174, DOI: 10.1080/01449290902765191
To link to this article: http://dx.doi.org/10.1080/01449290902765191
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) containedin the publications on our platform. However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of theContent. Any opinions and views expressed in this publication are the opinions and views of the authors, andare not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon andshould be independently verified with primary sources of information. Taylor and Francis shall not be liable forany losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoeveror howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use ofthe Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in anyform to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions

Anticipatory movement compatibility for virtual reality interaction devices
Sarah Lukasa*, Henning Braub and Iring Kocha
aInstitute of Psychology, RWTH Aachen University, Jagerstrasse 17–19, 52066 Aachen, Germany;bDaimler AG, Research and Technology, 89013 Ulm, Germany
(Received 22 October 2007; final version received 15 December 2008)
In the present study, we examined the impact of movement compatibility on the usability of two interaction devicesfor virtual reality (VR). To this end, we compared performance with the isometric spacemouse with that with theisotonic flystick, assuming that the flystick induces more movement compatibility in continuous movement and thusresults in better performance. In the study, 28 subjects performed an object rotation task on a holobench with thetwo devices. Additionally, rotation axis and rotation degree were varied. Results showed a notable advantage for theflystick with regard to handling time (the time from the beginning of the object’s appearance until the end ofrotation, determined by subjects). The data support the idea that the compatibility of motor movements with theresulting (i.e. anticipated) object movements is an important determinant of usability in VR environments.
Keywords: movement compatibility; anticipation; virtual reality; interaction devices
1. Introduction
Virtual reality (VR) is a relatively new technology. It isdefined as a high-end user–computer interface thatinvolves real-time simulation and interactions throughmultiple sensorial channels, predominantly throughvisual and auditory modalities (Heim 1998, Wickensand Hollands 2000, Burdea and Coiffet 2003). Typi-cally, the user has to directly interact with a VRsimulation. To do this, she or he has the choice ofvarious interaction devices, which vary in differentproperties. In this study, we focused on the property ofmovement compatibility. According to a widelyaccepted model, the notion of compatibility implicatesa ‘dimensional overlap’ of the cognitive representationof stimulus and response sets (for a review, see e.g.Kornblum et al. 1990 or Lien and Proctor 2002).Whenever stimulus and response dimensions areconceptually, perceptually or structurally similar, tworesponse functions are induced: automatic activationof the compatible response and intentional identifica-tion of the assigned response. If the assigned responseis the same as the compatible response, responseselection and execution is facilitated. If the assignedresponse requires another reaction as is triggeredthrough the automatic activation of the compatibleresponse, then this activation has to be inhibited –prolonging the response process (see Proctor and Vu2006, for a recent review). In the present study, werelated compatibility to usability of interaction devicesfor virtual environments.
VR systems open up a variety of new possibilitiesfor product development processes. With the increas-ing possibilities, the role of VR systems gets more andmore important and accordingly the requirement tocreate user-friendly designs (cf. Ottosson 2002, Patelet al. 2006). However, as Patel et al. (2006) state, thereare no guidelines yet how to best design a well usableVR system. As the possibilities of designing a VRsystem are so manifold, standardised guidelines wouldbe useful. With such guidelines, problems can beavoided that might come up if a VR system is indeedtechnically perfectly arranged but not well applicablefor the users.
There exists already a broad range of studiesconcerning the usability of VR environments. Forexample, some recent studies dealt with the distortionof perception in VR environments and their influenceon the product development process (Kohler 2008).The depth perception of VR systems was alsoinvestigated as an important aspect of designing VRsystems by Armbruster et al. (2008). They found thatvirtual distances were basically underestimated, whichcan impair the usability of the system. Bowman et al.(2001) concentrated on the set-up of testbeds incomparing selection and manipulation (Experiment 1)and travel techniques (Experiment 2). The selection/manipulation and travel techniques were rather ameans to an end. Further, their results were notreferred to a theoretical basis. The already mentionedstudy of Patel et al. (2006) focused on the interaction
*Corresponding author. Email: [email protected]
Behaviour & Information Technology
Vol. 29, No. 2, March–April 2010, 165–174
ISSN 0144-929X print/ISSN 1362-3001 online
� 2010 Taylor & Francis
DOI: 10.1080/01449290902765191
http://www.informaworld.com
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uthe
rn Q
ueen
slan
d] a
t 06:
15 0
5 O
ctob
er 2
014

of input devices with menu set-up of the system.They developed recommendations with regard tomenu activation, menu style, option selection, menustructure and interaction device. Concerning theusability of interaction devices, they recommend toconsider the user’s hand size, the arrangement of thebuttons on the interaction device, and the supplyof cues which indicate the point of direction ofthe device.
In our study, we focused on the compatibility bet-ween movements and their effects, as we assume thatthis kind of compatibility mediates the usability ofinteraction devices. As far as we know, this aspect hasnot yet been largely considered in usability studies upto now.
Stimulus–response compatibility has static anddynamic elements (Wickens and Hollands 2000). Thestatic elements refer to the location of response devicesto control their displays, whereas dynamic elementsrefer to how response devices should move and arecalled movement compatibility. In the present study,we examined the influence of movement compati-bility in VR.
An influential cognitive theory of action controlassumes that motor actions (or movements) arementally controlled by anticipation of their intendedeffects (see, for a review, Hommel et al. 2001,Hoffmann et al. 2004, Koch et al. 2004). This theoryhas found recent support in a number of empiricalstudies. For example, Stocker and Hoffmann (2004)let their subjects learn key press sequences with toneeffects versus constant or no effects. In conditionswhere the key press sequences are learned with toneeffects, these effects were presumably associated withthe responses that produced them. The authorsassumed that this association process led to anintegrated representation of the single movements,facilitating the execution of the key press sequences.Ziessler et al. (2004) reported data in favour of theassumption that action–effect relations are built up byresponse planning, which is part of the effect anti-cipation. Furthermore, Keller and Koch (2006a,b,2008) analysed effect anticipation with sequences ofdiscrete manual movements (key-press sequences),too. The task of the participants in the study ofKeller and Koch (2008) was to initiate a movementsequence in response to a discrete colour stimulus.Four different movement sequences were assigned byinstruction to four different colour stimuli. In thecompatible condition, vertically aligned keys on thetop, middle and bottom produced high, medium andlow pitched tones, respectively, as subjects pressed thekeys. In the incompatible condition, the key-to-tone mapping was mixed. Reaction time (RT) wassignificantly faster in the compatible condition,
suggesting that the anticipation of action effectsinfluences the selection and execution of these move-ment sequences.
The specific aim of our study was to apply ourknowledge about the influence of anticipated move-ment effects to temporally more extended motormovements by examining the usability of interactiondevices in VR applications. Nielsen (1993) definedusability as a multidimensional construct, comprisinglearnability, efficiency, memorability, low error rateand satisfaction. The DIN EN ISO 9241-11 (1998)emphasised the efficiency in the definition of usabilityfor devices. Usability is seen as supporting effectiveand efficient use.
In the present study, we assumed that themovement–effect compatibility mediates the usabilityof devices. Interaction devices allow direct interactionwith simulated objects and thus the execution ofcontinuous movements. Hence, the examination ofthe influence of anticipated movement consequenceswill help us to examine the degree to which thetransformation of motor movement in object move-ment is ergonomic, which we take here as the ability touse the anticipation of movement effects for complet-ing a task in a virtual environment.
More specifically, the present study was intendedas a first step into exploring differences in theanticipated movement compatibility between isometricand isotonic VR input devices. There were previousstudies which investigated the performance differencebetween isometric and isotonic input devices. The term‘isometric’ means for input devices that such a devicebuilds up tension, whereas no movement takes place.By contrast, for an isotonic device no tension exists,whereas energy is transformed to motion. Gibbs(1954) was one of the first to study ergonomicdifferences between devices by using two differentjoysticks. He referred to the feedback theory thatstates that isometric devices induce more propriocep-tive discharge and so facilitate learning to deal withsuch devices, accompanied by better performance.Card et al. (1978) investigated four different devices:an isotonic mouse, an isometric joystick, step keys andtext keys. The mouse was shown to be the best devicefor text selection on a monitor. Zhai and Milgram(1993) tested different devices in virtual environments,but did not find performance differences betweenisometric and isotonic devices (cf. Zhai 1993). Theyconcluded that the context has to be taken intoaccount: an isometric device shows best performancewith rate control, whereas an isotonic device showsbest performance with position control.1 In a laterstudy, Zhai and Smith (1999) investigated three inputdevices where isometric and isotonic devices werecombined in a scrolling and pointing task on a
166 S. Lukas et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uthe
rn Q
ueen
slan
d] a
t 06:
15 0
5 O
ctob
er 2
014

monitor. They found that an in-keyboard isometricjoystick (mini-joystick) could be a useful add-on devicefor web browsing. A recent study conducted by Sutterand Ziefle (2005) examined two notebook inputdevices. The isotonic touch pad showed a notablybetter performance level than the mini-joystick. Sohere, too, performance with the isotonic deviceexceeded that with the isometric device. However,none of these studies conceptualised the interactiondevices as mediators of anticipated movement–effectcompatibility. Here, we provide a first step towardssuch a cognitive account of usability of VR devices.With the theoretical basis, it is possible to understandbetter the cognitive strategies underlying the usage ofsystems (cf. e.g. Law et al. 2007). This makes it easierto find an adequate method to generalise the results infurther studies.
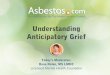
To explore potential performance differencesbetween the isotonic and isometric input devices inVR environments, we decided to use a spacemouse anda flystick in our study (see Figure 1). These deviceswere taken as example for the respective classes ofdevices. Neither the spacemouse nor the flystick wereused in the described studies above, even though thereare studies comparing performance with the space-mouse and other isometric devices (e.g. Casiez et al.2004, Casiez and Chaillou 2005). However, both thespacemouse and the flystick are frequently used devicesin computer aided design and VR application in theautomotive industry.
The spacemouse, as our example of an isometricdevice, is a product of the aerospace technique. It istable-bound. By contrast, the flystick as isotonic devicecan be freely moved. The flystick (the name comesfrom flying joystick) was specially designed for theautomotive industry for applications in the area ofdigital design reviews (Knopfle and Voß 2000). Ourempirical goal was to examine to which extent thesetwo types of interaction device differ with respectto cognitive requirements based on movementcompatibility. It should be noted that the two input
devices differ in several features too, apart from beingisometric and isotonic. These features are inherentproperties of the devices that are not under experi-mental control. However, to minimise the differencesthat were not part of the experimental hypothesis, onlythe device functions necessary for movements wereused (i.e. for the spacemouse the control ‘cap’ and forthe flystick only the key that is matched to the indexfinger). No other keys or functions were used (see alsothe discussion).
We decided to compare the performance of thetwo interaction devices with a rotation-task similarto the classic task that was used by Shepard andMetzler (1971). These authors presented two rotatedabstract objects and had subjects decide if the objectswere the same or different. However, in the presentstudy, we used a mental rotation task as methodo-logical tool to examine the potentially differentcompatibility characteristics of the two interactiondevices. In our task, the two presented objects werealways the same. Instead of a same–differentdecision, we asked the subjects to produce motormovement and to rotate motorically one of theobjects into the same spatial orientation as theother object.
For executing a rotation movement, mental rota-tion had to precede the actual motor movement (seee.g. Wexler et al. 1998, Wohlschlager andWohlschlager 1998, Wexler and Klam 2001). Hence,testing performance in a rotation task seemed to be asuitable method to examine the effect of compatibilitybetween planned movement and its consequences(i.e. the rotation of the visual object) in virtualenvironments.
The flystick is controlled with the whole hand.Rotation of the referred object is achieved by rotatingthe hand. With respect to the cognitive requirement,this is a relatively ‘compatible’ condition, because themotor movement closely corresponds to the intendedmovement of the manipulated object. By comparison,the spacemouse is controlled only by the fingertips, sothat it is pressure rather than motor movement thattranslates into object rotation. This translation to theintended effect is presumably less compatible becausethe motor movement and the object movement do nothave very much in common (cf. Kornblum et al. 1990,Wickens and Hollands 2000). Therefore, in the contextof our task requiring rotation movement, we expectedthe flystick to be associated with significantly betterperformance in handling time (HT) and accuracy thanthe spacemouse. In addition to this general expecta-tion, our study was designed to explore whether therelative performance impairment (if observed) woulddiffer as a function of rotation axis and rotationdegree.
Figure 1. Spacemouse and flystick (with friendly permissionof the Advanced Realtime Tracking GmbH).
Behaviour & Information Technology 167
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uthe
rn Q
ueen
slan
d] a
t 06:
15 0
5 O
ctob
er 2
014

2. Method
2.1. Subjects
Twenty-eight subjects took part in the experiment (agerange 22–52 years). There were 21 men and sevenwomen, all of them were employees of Daimler AG inUlm, Germany. The subjects had different professionalbackgrounds but all of them were relative novices inthe area of VR interaction. That is, 17 of the subjectshave never used the spacemouse before, whereas 22have never used the flystick before. Six have used thespacemouse one time before and the last five haveworked with the spacemouse some times. In contrast,the flystick was used only once by six subjects – none ofthe subjects has used this device several times. Theparticipation was voluntary.
2.2. Stimuli and task
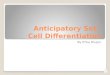
The virtual objects used in the experiment were con-structed after Shepard and Metzler (1971). The objectsconsisted of 10 cubes, assembled to a L-shaped bodyand two distant extremities. Four Shepard andMetzler-like objects and their mirror version about the verticalaxis were used for the presented study (see Figure 2).The objects were modelled in the visualisation programMaya and saved as Maya-ASCII-files. Afterwards thefiles were converted to Inventor-files so that they werecompatible with an in-house software solution atDaimler for projecting the objects on the holobench.
In the experiment, the subjects had to rotate thisthree-dimensional object projected on a holobenchfrom the manufacturer TANTM in a given orientationwith the spacemouse (Magellan 3D controller classicfrom LogicadTM), and the flystick from A.R.T.GmbH. The holobench is a projector-based output-device. Two DLP-projectors (DLP ¼ digital lightprocessing) screen an image on the back of spe-cially coated plexiglass. With Infitec-glasses (Infitec ¼interference filter technique) this image is perceived
three-dimensionally. The orientation of the objects wasdefined by the three rotation axes x, y and z, and fourdifferent rotation degrees: 608, 1208, 2408 and 3008.Hence, there were 12 possible variations per object –resulting in 96 variations in our case. These 96variations were presented in the centre of theholobench in random order within one block of trials.Note that the x-axis goes from the subject’s left to theright side, the y-axis is the bottom-up direction and thez-axis goes from the subject away to the horizon. Inthis article, we refer to rotations as being about theseaxes, rather than along these axes.
In every trial, two identical objects – one green, onered – were presented. The red (and left) object was inthe 08-position, the green (and right) one was in arotated position as described above. The task was tomove the rotated object in the same position as thestandard model with the relevant device hold in thedominant hand. Thereby, it was not relevant at whichtranslation position the object were deposited – onlythe degree of rotation was counted. The relevant(green) object was pre-selected for the rotation, the redstandard object was static. The task started with a self-paced press of the function key 1 (F1) using the non-dominant hand and ended with a press of the samekey. The first key-press triggered immediately thepresentation of the visual stimulus (i.e. the object). Thetime span between these two key presses was recordedas HT. Our analyses are based on this time measure.We also recorded the time from the first key-press untilthe beginning of the movement. We refer to this timemeasure as RT. Also, the time from the beginning ofthe movement until the press of the key F1 to end themovement was registered. We refer to this timemeasure as movement time (MT). Furthermore, theend-position was registered. Using the end-position,errors were calculated. When the rotation cosinus was1, the divergence of the correct end position was 0.Correctly rotated objects showed a cosinus that wasnearly 1, with only small divergence. We decided to
Figure 2. The set of stimulus shapes (a) and an example of the object display on the holobench (b).
168 S. Lukas et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uthe
rn Q
ueen
slan
d] a
t 06:
15 0
5 O
ctob
er 2
014

count a trial as error when the divergence cosinus wasless than 0.95.
The experiment was separated into two blocks.After the first block, the interaction device waschanged. Half of the subjects began with the space-mouse and the other half with the flystick. The subjectsstarted the first trial pressing the key F1 on a standardcomputer keyboard. When the subjects believed thatthe object was rotated into the correct orientation, theypressed the key again with the non-dominant hand.The next object appeared immediately.
2.3. Procedure and design
Before the tests began, the subjects completed aquestionnaire in which they gave information abouttheir age, sex, handedness and vision. Subsequently,their spatial ability was tested with the two subtestsfigure selection (‘Figurenauswahl’ in German) anddice task (‘Wurfelaufgabe’) from the IST 2000-R(Amthauer et al. 2001), an intelligence structure test.
The instructions for the experimental protocol weregiven in written and oral form. The subjects had tocomplete two blocks – one block with the spacemouseand one block with the flystick. Before each block, 12practice trials were given. One block lasted about30 min, the entire experiment took about 90 min. Theorder of device was counterbalanced across subjects.Axes (x, y, z), degree of object rotation (60, 120, 240,360) and device (spacemouse, flystick) were within-subjects independent variables, order of device (firstspacemouse then flystick, and vice versa) was abetween-subjects counterbalancing variable. Handlingtime (HT) and errors were the primary dependentvariables. Significance was tested at a ¼ 0.05. Forvariables with more than two levels (i.e. rotationdegree and axis), the degrees of freedom (df) wereGreenhouse–Geisser corrected if sphericity could notbe assumed.
At the end of the experiment, subjects completed aquestionnaire that queried the subjective user satisfac-tion. The theoretical basis of this questionnaire was theheuristics of dialogue design listed in Sarodnick andBrau (2005; cf. also DIN EN ISO 9241-11 1998 andNielsen 1993). We used the following heuristics asscales for the questionnaire: task adequacy, expectanceconformity, fault tolerance, learning support, regula-tion of perception and joy of use. Further, subjectsgave a self-assessment of their own performance.
3. Results
On the basis of results of an explorative data analysis,prior to analyses of HT and accuracy we discardedtrials with HT below 1 sec and above 30 sec as outliers(5.1%). For HT analyses, error trials (4.2%) wereexcluded. As a first step, we tested whether the twodevices were differently affected by device order(see Figure 3). To this end, we conducted a mixedanalysis of variance (ANOVA) with the within-subjectvariable device and the between-subject variable orderof device. The main effect of device was significant(F (1, 26) ¼ 95.44, p 5 0.01), indicating generallyhigher HT for the spacemouse than for the flystick(14.54 sec vs 10.2 sec). However, neither the maineffect of device order (F (1, 26) ¼ 0.02, p 4 0.05) northe interaction between device and order was signifi-cant (F (1, 26) ¼ 1.49, p 4 0.05), indicating that theeffect of device is independent of device order. Weconclude that any influence of device order iscontrolled by our counterbalancing procedure. There-fore, all following analyses were run without the orderof device variable.
In the main analysis, we ran a three-way ANOVAwith the independent variables device, axis and degreeof rotation (see Figure 4). Variance homogeneity wasgiven for all variables except for axis. The degree offreedoms of this variable was Greenhouse–Geisser
Figure 3. Practice benefit from Block 1 to Block 2.
Behaviour & Information Technology 169
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uthe
rn Q
ueen
slan
d] a
t 06:
15 0
5 O
ctob
er 2
014

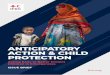
corrected, as aforementioned. Using the flystick led toshorter HTs, leading to a significant main effect ofdevice, F (1, 27) ¼ 90.92, p 5 0.01. The main effect ofaxis was not significant, F (1.4, 37.73) ¼ 3.59,p 4 0.05, but the main effect of degree of rotationwas significant, F (3,81) ¼ 259.64, p 5 0.01. Further-more, the two-way interaction between axis anddegree was not significant, F (6, 162) ¼ 1.22,p 4 0.05, but the two-way interactions betweendevice and axis (F (1.54, 41.5) ¼ 16.94, p 5 0.01)and of device and degree (F (3, 81) ¼ 26.04, p 5 0.01)were significant. Importantly, the three-way interac-tion of axis, degree and device was significant, too(F (6, 162) ¼ 2.22, p 5 0.05).
To understand the nature of the three-way inter-action better, we performed separate ANOVAs foreach of the two devices. For the spacemouse, we founda main effect of rotation degree (F (3, 81) ¼ 183.18,p 5 0.01) as well as for axis (F (1.27, 34.4) ¼ 11.25,p 5 0.01) and an interaction effect of both (F (6,162) ¼ 2.21, p 5 0.05). In contrast, for the flystick, wefound a main effect of rotation degree (F (2.29,61.88) ¼ 108.60, p 5 0.01) and of axis (F (2,54) ¼ 3.55, p 5 0.05), but no interaction of degreeand axis (F (6, 162) ¼ 1.21, p 4 0.05).
As can be seen in Figure 4, only when using thespacemouse, rotation performance about the x-axis(Mx ¼ 13.42) differed significantly from that about they- and the z-axis (My ¼ 15.14 vs Mz ¼ 15.05). Further,rotations about 608 (M ¼ 12.43) differed significantlyfrom 1208 (M ¼ 17.33), from 2408 (M ¼ 16.81) andfrom 3008 (M ¼ 11.56), but rotations about 1208 and2408 did not differ significantly. In contrast, for theflystick, the three axes differed in overall comparison(see above), with the x-axis showing the longest HT(Mx ¼ 10.55, My ¼ 10.01, Mz ¼ 10.04). All HTs ofthe rotation degrees differed from each other(M60 ¼ 9.10, M120 ¼ 12.02, M240 ¼ 11.21,M300 ¼ 8.47).2
As aforementioned, we also registered RT and MTas components of HT. RT was significantly shorter for
the spacemouse (0.81 sec) than for the flystick(1.68 sec), F (1, 27) ¼ 52.12, p 5 0.01. However, thisresult is most likely because of a technical artefact.While using the spacemouse, the cap of the space-mouse is always touched. To start a movement, onlythe pressure on the cap has to be strengthened. Thus,the transition from touch to pressure (thus movement)is fluent. In comparison, for the flystick the differencebetween standstill and movement is more distinct.To start a movement, the key for the index finger hasto be pressed. If the key is pressed, a movement ispossible. If the key is not pressed, the device can bemoved without moving the virtual object. Thus, RTdifferences between the two devices are difficult tointerpret. Therefore, we decided to use HT in ouranalyses. However, MT showed a pattern like HT,that is, MT is lower for the flystick (8.64 sec) than forthe spacemouse (13.89 sec), F (1, 27) ¼ 105.56,p 5 0.01.
For the analysis of accuracy data (see Table 1), weconducted a three-way ANOVA with the independentvariables device, axis and rotation degree. The maineffect of device was not significant, F 5 1, but wefound significant main effects of axis (F (1.62,43.8) ¼ 4.39, p 5 0.05) and degree (F (1.68,45.22) ¼ 15.12, p 5 0.01). The two-way interactionbetween device and degree was significant too (F (2.32,62.7) ¼ 3.06, p 5 0.05). Using the spacemouse pro-duced fewer errors for 1208 rotations (5.8%), but itproduced more errors for 2408 rotations (7.1%). Forthe flystick, the pattern was vice versa. Rotations about1208 produced more errors (8.6%) than rotationsabout 2408 (6.5%). Also, the two-way interactionbetween axis and degree was significant (F (6,162) ¼ 2.13, p ¼ 0.05). Rotations about 1208 and2408 showed a higher error rate for the x-axis thanfor the y- and z-axis. No other interactions weresignificant. Generally, the error rates do not reveal anysignificant effects that counteracted the interpretationof pattern of HT data. Hence, we conclude that therewas no speed–accuracy trade-off.
Figure 4. Three-way interaction of device, axis and degree.
170 S. Lukas et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uthe
rn Q
ueen
slan
d] a
t 06:
15 0
5 O
ctob
er 2
014

Next, we analysed the possible influence of spatialability which was tested by two subtests of the IST2000-R. To this end, we subdivided the group ofparticipants, based on performance in the two subtests,into those with ‘good’ (n ¼ 21) and ‘bad’ (n ¼ 7)spatial ability, respectively. The cut was made by ascore of 10, which is 50% of what could be reached;however, there were no interactions of spatial abilitywith the devices or any other independent variable(Fs 5 1). This indicates that in our study, performancewith the two different devices was independent fromthe spatial ability of the subjects.
To investigate the subjective user satisfaction, weanalysed the questionnaire that was completed afterthe experiment. The scale of the questionnaire that weused was poled so that high values meant highsatisfaction (with the maximum 4) and low valuesmeant low satisfaction (with the minimum 1). Therewas a significant difference between the overall ratingof spacemouse (M ¼ 2.25) and that of the flystick(M ¼ 3.45), t (27) ¼ 711.12, p 5 0.001, indicating aclear user preference for the flystick.
In an additional two-way analysis, we also analysedif performance with the spacemouse and the flystickdiffered as a function of the individual objects.Concerning HT, the main effect of object wassignificant (F (7, 189) ¼ 6.67, p 5 0.01) reflecting thefact that HT with object 7 (see Figure 2) differedsignificantly from that with objects 1, 2, 5 and 6 in theway that the rotation of object 7 required the highestHT. Note that objects 1 and 2 (and 5 and 6,respectively) were the same objects, but mirrored.The interaction of device and object was significant,
too (F (7, 189) ¼ 4.3, p 5 0.01). That is, for thespacemouse, object 7 differed from all other objects,except for object 1 and object 4. For the flystick, object7 differed from all objects except for objects 3 and 8.Concerning the error rates, the only significance wasfound for the main effect of object (F (7, 189) ¼ 3.31,p 5 0.01). That is, performance with object 8 differedsignificantly from that with object 1 such that object 8showed a higher error rate (6.6%) than object 1(2.5%). Note that object 7 and object 8 were the sameobjects, but mirrored. These data suggest that objects 7and 8 were more difficult to handle than the otherobjects. However, given the relatively small number ofobservations in each of the cells of this ANOVAdesign, we believe that these data do not allow a clearinterpretation and, most importantly, do not contra-dict our main conclusions with respect to the super-iority of the flystick relative to the spacemouse whenperforming a manual rotation task.3
4. Discussion
The aim of the present study was to examine theperformance with two different interaction devicesusing a manual object-rotation task in a virtualenvironment. To this end, we compared performancewith the flystick with that with the spacemouse. Inaddition, we varied rotation axis and rotation degreeto explore whether these variables would interact withthe type of device.
The data indicate generally better performancewith the flystick than with the spacemouse. Morespecifically, we found that performance with the twodevices differed most with respect to the requiredrotation axis. For the flystick, rotation about the x-axisproduced worse performance than the other axes,whereas the opposite was the case for the spacemouse.For the spacemouse, the x-axis produced relatively thebest performance. However, even for the x-axis, theflystick showed better performance than the space-mouse. The different effect of the x-axis may be due tothe hand movements to be made – especially for theflystick. Here, the wrist has to fulfil an ulnar abduction(in the direction of the little finger) and a radialabduction (in the direction of the thumb). Movementsin these directions are more limited than wrist flexion/extension. Typical range of motion in radial and ulnardirections are 408 and 308, respectively (Wickens et al.2004, Bommas et al. 2005). In contrast, for thespacemouse, even though performance was overallmuch slower, rotation about the x-axis was relativelyless inferior probably because the base position of thesubject’s hands favoured rotation about the x-axis.
The performance for the four degrees showed anexpected pattern: rotations about 608 and 3008
Table 1. Error rates in percent (mean and standarddeviation) as a function of device, axis and degree.
Interaction device
Spacemouse Flystick
Mean SD Mean SD
x-axis608 2.3 1.2 1.5 1.11208 8.2 2.0 11.2 2.52408 9.1 2.2 10.4 2.93008 3.6 1.4 2.4 1.2
y-axis608 2.5 1.5 2.2 0.91208 6.4 2.0 7.8 1.82408 5.9 2.8 5.4 1.63008 1.7 0.9 0.8 0.6
z-axis608 3.8 1.4 2.3 1.11208 6.3 1.7 6.8 2.02408 9.9 2.1 3.7 1.53008 2.8 1.1 2.5 1.3
Behaviour & Information Technology 171
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uthe
rn Q
ueen
slan
d] a
t 06:
15 0
5 O
ctob
er 2
014

demanded less HT than 1208 and 2408, for which alonger distance has to be covered. The subjects seem torotate in the direction where the distance is shortest (cf.Wohlschlager and Wohlschlager 1998). If the subjectsrotate only in one direction, 608 and 3008 should showmuch more difference in HT – as would be the case for1208 and 2408. Rotations about 3008 required less HTthan 608, and 2408 required less HT than 1208,suggesting that the direction of the rotation seems tohave some influence. The rotations of the object about3008 and 2408, respectively, were counterclockwiseabout the y- and z-axis and backward for the x-axis,but the manual rotation had to be conducted in thecontrary direction. There were also differences depend-ing on the device between the various rotation degrees.For the spacemouse, rotations about 608 and 3008differed more from rotations about 1208 and 2408 thanfor the flystick. This means that with increasingdistance from the 08-position, the performance dis-advantage (i.e. longer HTs) of the spacemouse relativeto the flystick was even stronger. Taken together, weobserved a clear performance benefit of the flystickrelative to the spacemouse in our manual rotation task,and this general benefit was even more pronounced inspecific combinations of rotation axis and degree.
We would like to note that this relative perfor-mance benefit of the flystick cannot be attributed todifferences in familiarity or practice with the twodevices because the flystick was in fact the less familiarand practised device for the subjects. Moreover, eventhough using the flystick produced more reportedsymptoms of fatigue, the flystick showed a clearadvantage over the spacemouse concerning usersatisfaction, too.
On the basis of cognitive accounts of actioncontrol, we assumed that actions are mentally con-trolled by anticipation of their intended effects (e.g.Hommel et al. 2001, Koch et al. 2004). This implicatesthat compatible action–effect associations lead tobetter (more efficient) performance because effectscan be anticipated more easily if they are intuitive.Indeed, the flystick showed a clear advantage com-pared to the spacemouse. This suggests that an isotonicdevice like the flystick facilitates the anticipation ofintended motor movement effects more than anisometric device (like the spacemouse). This is due tothe spacemouse having a relatively low compatibilitybetween motor hand movement and anticipated visualmovement of the corresponding object compared tothe flystick.
As aforementioned, HT consisted of the compo-nents RT and MT. It would be an interesting researchquestion to examine whether compatibility of actioneffects affects the planning or the execution of move-ment, or both. Differences in planning should affect
RT, whereas differences in execution should affect MT.However, as described in the results section, technicaldifferences in the registration of movement onset in thespacemouse and the flystick preclude a valid separationof these components of action. In future studies, itwould be clearly desirable to be able to decomposeplanning and execution components in manual rota-tion tasks such as used in our study.
We would like to note that the observed relativeperformance benefit of the flystick was found in thecontext of a manual rotation task. Thus, our conclu-sion can be generalised to tasks that include aspects ofmental or manual rotation, but further generalisationrequires more research using tasks with differentcognitive or motor demands. Likewise, we testedonly the flystick and the spacemouse, as specificinteraction devices. For a generalisation to isotonicand isometric devices in general, further experimentswould have to be conducted. In these experiments, itwould be helpful to have a condition where theanticipated action effects would match the specifichandling characteristics of the spacemouse. Then, wewould expect better performance for the spacemouseor other isometric devices, relative to isotonic devices.If it is possible to obtain such a cross-over interactionin future studies, then this would provide furtherstrong support for the assumption that the study ofeffect anticipation can be a useful method to analysethe usability of interaction devices. Hence, whatdetermines the usability of a device is probably notnecessarily the isometric versus isotonic distinction butmore the interaction of the device with the requiredcognitive and/or motor demands of the task. Thisneeds to be tested in future studies.
Furthermore, we would like to note that the flystickand the spacemouse show various differences in thesubsurface, apart from being superficially isotonic andisometric, respectively. The spacemouse is controlledonly with the fingertips, whereas the flystick is held inthe whole hand and controlled with hand and arm. Forthis reason, the proprioceptive feedback is different.For the spacemouse, more effort is required in control,leading to stronger tension in the muscles, whereas forthe flystick, proprioceptive feedback comes from theposition of the arm. As already mentioned, Gibbs(1954) referred to the inflow-hypothesis of the feed-back theory stating that motor actions are reliant onfeedback information that ‘flows’ from the peripheralnervous system to the central nervous system. Notter-man and Tufano (1980) also tried to confirm theinflow-hypothesis with the aid of an isometric and anisotonic device in a tracking-experiment. They sug-gested that the stronger effort for isometric devicesleads to stronger feedback, thus showing betterperformance (which is contrary to our results), but
172 S. Lukas et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uthe
rn Q
ueen
slan
d] a
t 06:
15 0
5 O
ctob
er 2
014

their results did not confirm the inflow-hypothesis,either. Hence, we conclude that differences in proprio-ceptive feedback between the devices do not seem to bea good explanation for our results. Nevertheless, theissue of differences in proprioceptive feedback acrossinteraction devices seems to be a worthwhile topic forfuture research.
In summary, the present study allows the practicalconclusion that the flystick should be preferred to thespacemouse when rotation plays an important role inthe task, such as in our manual object rotation-task.Further, the most likely explanation for our findings isthat movement compatibility in dynamic motor taskplays a major role, and thus appears to be higher in theflystick than in the spacemouse. However, it should benoted that the spacemouse and the flystick are quitedifferent interaction devices. Therefore, future researchshould include different isometric and isotonic devicesto allow more far-reaching theoretical and practicalconclusions.
As already mentioned, cognitive strategies under-lying the usage of systems can be better understoodwith a theoretical basis (Law et al. 2007). Referring tocognitive accounts of action control (Prinz et al. 2009)can help finding an adequate method to generalise theresults in further studies. Further, it will help indeveloping missing guidelines how to best design a wellusable VR system (e.g. Patel et al. 2006).
Notes
1. For position control the object position is directlycontrolled by the user. The function of transfer fromthe human user to the object movement is constant. Forrate control, the human input is transferred to thevelocity of the object movement. Here, the function oftransfer from the human user to the object movement isan integral function (Kim et al. 1987, Zhai and Milgram1993).
2. From the 28 subjects, only four were left-handed. Toexamine whether handedness had any effect on thedifference between the clockwise and counterclockwiserotation degrees, a mixed ANOVA with the within-variable degree and the between variable handedness wasconducted. An interaction could not be found, F (3,78) ¼ 1.46, p 4 0.05.
3. In a second study, we extended our study into anapplication environment. The aim was to analyseperformance with the two devices in a more realisticsituation. We report this study only in a footnote becausedue to technical instability of the system, some of thedata were lost. We let the same subjects as describedabove carry out a complex constructibility simulation,conducted shortly after Experiment 1 to benefit from theacquired practice with the two devices. The taskconsisted of dismantling and installing two differentassemblies of a car interior 3D simulation, projected onthe holobench. For the measurement of the object’s end-position (i.e. accuracy), too many data were lost, so only
HT was analysed. As in the main experiment, perfor-mance with the interaction devices differed significantly(F (1, 25) ¼ 25.73, p 5 0.01). The flystick had a clearspeed advantage relative to the spacemouse (60.04 sec vs82.94 sec). Thus, the follow-up study supported thefindings of the main study.
References
Amthauer, R., et al., 2001. Intelligenz-Struktur-test 2000 R.Gottingen: Hogrefe.
Armbruster, C., et al., 2008. Depth perception in virtualreality: distance estimations in peri- and extrapersonalspace. Cyber Psychology and Behavior, 11 (1), 9–15.
Bommas, U., Teubner, P., and Voß, R., 2005. KurzlehrbuchAnatomie und Embryologie. Stuttgart: Georg Thieme.
Bowman, D.A., Johnson, D.B., and Hodges, L.F., 2001. Testbed evaluation of virtual environment interaction tech-niques. Presence, 10 (1), 75–95.
Burdea, G.C. and Coiffet, P., 2003. Virtual reality technology.2nd ed. Hoboken, NJ: Wiley-Interscience.
Card, S.K., English, W.K., and Burr, B.J., 1978. Evaluationof mouse, rate-controlled isometric joystick, step keysand text keys for text selection on a CRT. Ergonomics, 21(8), 601–613.
Casiez, G. and Chaillou, C., 2005. Effects of DOF separationon elastic devices for the navigation in 3D virtualenvironments with force feedback. In: Proceedings ofthe First Joint Eurohaptics Conference and Symposium onHaptic Interfaces for Virtual Environment and Teleopera-tor Systems. Pisa, Italy, 483–486.
Casiez, G., Plenacoste, P., and Chaillou, C., 2004. Does DOFseparation on elastic devices improve user 3d steeringtask performance? Lecture Notes in Computer Science.Heidelberg: Springer.
DIN EN ISO 9241-11, 1998. Ergonomic requirements foroffice work with visual display terminals (VDTs) – Part11: Guidance on usability. Berlin: Beuth.
Gibbs, C.B., 1954. The continuous regulation of skilledresponse by kinaesthetic feed back. The British Journal ofMedical Psychology, 45 (1), 24–39.
Heim, M., 1998. Virtual realism. New York: OxfordUniversity Press.
Hoffmann, J., Stocker, C., and Kunde, W., 2004. Antici-patory control of actions. International Journal of Sportand Exercise Psychology, 2 (4), 346–361.
Hommel, B., et al., 2001. The theory of event coding (TEC):a framework for perception and action planning.Behavioral and Brain Sciences, 24 (5), 849–937.
Keller, P. and Koch, I., 2006a. The planning and executionof short auditory sequences. Psychonomic Bulletin andReview, 13 (4), 711–716.
Keller, P. and Koch, I., 2006b. Exogenous and endogenousresponse priming with auditory stimuli. Advances inCognitive Psychology, 2 (4), 269–276.
Keller, P. and Koch, I., 2008. Action planning in sequentialskills: relations to music performance. Quarterly Journalof Experimental Psychology, 61 (2), 275–291.
Kim, W.S., et al., 1987. A comparison of position and ratecontrol for telemanipulations with consideration ofmanipulator system dynamics. IEEE Journal of Roboticsand Automation, 3 (5), 426–436.
Knopfle, C. and Voß, G., 2000. An intuitive VR userinterface for design review. In: Proceedings of the workingconference on advanced visual interfaces. Palermo, Italy,98–101.
Behaviour & Information Technology 173
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uthe
rn Q
ueen
slan
d] a
t 06:
15 0
5 O
ctob
er 2
014

Koch, I., Keller, P., and Prinz, W., 2004. The ideomotorapproach to action control: implications for skilledperformance. International Journal of Sport and ExercisePsychology, 2 (4), 362–375.
Kohler, A., 2008. Untersuchung haufig auftretender wahrneh-mungspsychologischer Phanomene in der Virtual Reality.Unpublished manuscript. Technische Universitat Dresden.
Kornblum, S., Hasbroucq, T., and Osman, A., 1990.Dimensional overlap: cognitive base for stimulus-re-sponse compatibility – a model and taxonomy. Psycho-logical Review, 97 (2), 253–270.
Law, E.L.-C., Blazic, B.J., and Pipan, M., 2007. Analyses ofuser rationality and system learnability: performing taskvariants in user tests. Behaviour & Information Technol-ogy, 26 (5), 421–436.
Lien, M.-C. and Proctor, R.W., 2002. Stimulus-responsecompatibility and psychological refractory period effects:implications for response selection. Psychonomic Bulletinand Review, 9 (2), 212–238.
Nielsen, J., 1993. Usability engineering. San Diego, London:Academic Press.
Notterman, J.M. and Tufano, D.R., 1980. Variablesinfluencing outflow–inflow interpretation of trackingperformance: predictability of target motion, transferfunction, and practice. Journal of Experimental Psychol-ogy: Human Perception and Performance, 6 (1), 85–88.
Ottosson, S., 2002. Virtual reality in the product developmentprocess. Journal of Engineering Design, 13 (2), 159–172.
Patel, H., et al., 2006. Human centered design of 3-D inter-action devices to control virtual environments. Internatio-nal Journal of Human-Computer Studies, 64 (3), 207–220.
Prinz, W., Aschersleben, G., and Koch, I., 2009. Cognitionand action. In: E. Morsella, J. Bargh, and P.M. Gollwitzer,eds. The psychology of action, Volume 2: mechanisms ofhuman action. Oxford: Oxford University Press, 35–71.
Proctor, R.W. and Vu, K.-P.L., 2006. Stimulus-responsecompatibility principles: data, theory, and application.Boca Raton, FL: CRC Press.
Sarodnick, F. and Brau, H., 2005. Methoden der usabilityevaluation. Bern: Hans Huber.
Shepard, R.N. and Metzler, J., 1971. Mental rotation ofthree-dimensional objects. Science, 171 (3972), 701–703.
Stocker, C. and Hoffmann, J., 2004. The ideomotor principleand motor sequence acquisition: tone effects facilitatemovement chunking. Psychological Research, 68 (2–3),126–137.
Sutter, C. and Ziefle, M., 2005. Interacting with notebookinput devices: an analysis of motor performance andusers’ expertise. Human Factors, 47 (1), 169–187.
Wexler, M. and Klam, F., 2001. Movement prediction andmovement production. Journal of Experimental Psychol-ogy: Human Perception and Performance, 27 (1), 48–64.
Wexler, M., Kosslyn, S.M., and Berthoz, A., 1998. Motorprocesses in mental rotation. Cognition, 68 (1), 77–94.
Wickens, C.D. and Hollands, J.G., 2000. Engineeringpsychology and human performance. 3rd ed. Upper SaddleRiver, NJ: Prentice-Hall.
Wickens, C.D., et al., 2004. An introduction to human factorsengineering. 2nd ed. Upper Saddle River, NJ: PearsonEducation.
Wohlschlager, A. and Wohlschlager, A., 1998. Mental andmanual rotation. Journal of Experimental Psychology:Human Perception and Performance, 24 (2), 397–412.
Zhai, S., 1993. Investigation of feel for 6DOF inputs:isometric and elastic rate control for manipulation in3D environments. In: Proceedings of the Human Factorsand Ergonomics Society, 37th annual meeting, Seattle,USA, 323–327.
Zhai, S. and Milgram, P., 1993. Human performanceevaluation of manipulation schemes in virtual environ-ments. In: Proceedings of VRAIS’93: the first IEEEVirtual Reality Annual International Symposium, Seattle,USA, 155–161.
Zhai, S. and Smith, B.A., 1999. Multistream input: anexperimental study of document scrolling methods. IBMSystems Journal, 38 (4), 642–651.
Ziessler, M., Nattkemper, D., and Frensch, P.A., 2004. Therole of anticipation and intention in the learning ofeffects of self-performed actions. Psychological Research,68 (2–3), 163–175.
174 S. Lukas et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uthe
rn Q
ueen
slan
d] a
t 06:
15 0
5 O
ctob
er 2
014