Embed Size (px)
Citation preview
Andrzej Leśnicki Układy przyczynowe i nieprzyczynowe 1/1
SYGNAŁY, ELEMENTY, UKŁADY I SYSTEMY
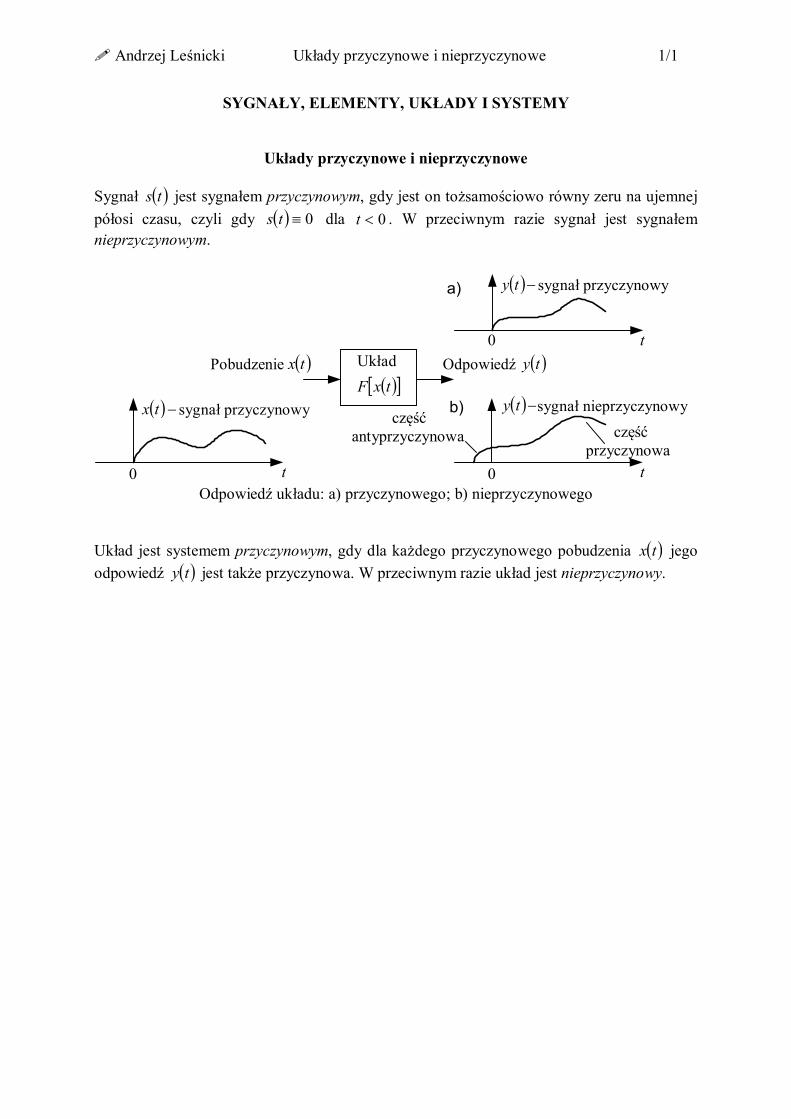
Układy przyczynowe i nieprzyczynowe Sygnał ts jest sygnałem przyczynowym, gdy jest on tożsamościowo równy zeru na ujemnej półosi czasu, czyli gdy 0ts dla 0t . W przeciwnym razie sygnał jest sygnałem nieprzyczynowym.
txF tx ty
tx
0
0 0
t
t t
ty
ty
Odpowiedź Pobudzenie Układ
sygnał przyczynowy sygnał nieprzyczynowy
sygnał przyczynowy a)
b) część antyprzyczynowa część
przyczynowa
Odpowiedź układu: a) przyczynowego; b) nieprzyczynowego Układ jest systemem przyczynowym, gdy dla każdego przyczynowego pobudzenia tx jego odpowiedź ty jest także przyczynowa. W przeciwnym razie układ jest nieprzyczynowy.
Andrzej Leśnicki Układy o parametrach skupionych i rozłożonych 1/2
Układy o parametrach skupionych i rozłożonych Każdy przyrząd w układzie ma określoną strukturę przestrzenną i przy ścisłych rozważaniach powinien być opisany równaniami różniczkowymi cząstkowymi (zmiennymi w tych równaniach są oprócz sygnałów także współrzędne przestrzenne). Rozwiązywanie równań różniczkowych cząstkowych przy zadanych warunkach brzegowych jest trudnym zadaniem matematycznym. Dlatego jeśli tylko jest to możliwe, to za cenę dokładności modelowania przyjmuje się, że właściwości przyrządu skupiają się w jednym punkcie. Pozwala to opisać przyrząd znacznie łatwiejszymi do rozwiązania równaniami różniczkowymi zwyczajnymi, a element modelujący ten przyrząd nazywa się elementem o parametrach skupionych (elementem skupionym). W przeciwnym razie element nazywa się elementem o parametrach rozłożonych (elementem rozłożonym). Podobnie jak elementy klasyfikuje się układy. Układ zbudowany wyłącznie z elementów skupionych nazywa się układem skupionym. Jeżeli układ zawiera chociaż jeden element rozłożony, to nazywa się układem rozłożonym. W elemencie rozłożonym współrzędne przestrzenne nie mogą być pominięte i sygnał pokonując z określoną prędkością drogę l od jednej końcówki do drugiej pojawia się na drugiej końcówce z opóźnieniem . Jeżeli sygnał wejściowy jest sinusoidalny
ftXtx m 2sin to sygnał wyjściowy będzie opóźniony
tfYty m 2sin o czas
cl
Opóźnienie to jest pomijalnie małe pod warunkiem, że odpowiadająca mu zmiana fazy jest znacznie mniejsza niż 2 (wartość funkcji sinus zmieni się nieznacznie przy małej zmianie fazy)
22
clf
Ponieważ sygnałowi o częstotliwości f odpowiada fala o długości fc i okresie
fT 1 , to powyższa relacja może być przekształcona do postaci
4
l lub 4T
lub 41
f
Oznacza to, że dany element może być traktowany jako element skupiony, gdy jego wymiary l są znacznie mniejsze niż ćwierć długości fali (in. czas przejścia sygnału przez element jest znacznie mniejszy niż ćwierć okresu fali lub częstotliwość jest znacznie mniejsza niż ćwierć odwrotności opóźnienia).

Andrzej Leśnicki Układy o parametrach skupionych i rozłożonych 2/2
Przykład 20. W typowym rezystorze odległość między końcówkami wynosi cm1l , a prędkość rozchodzenia się sygnału jest bliska prędkości światła sm103 8c . Czas przejścia sygnału od jednej końcówki do drugiej w rezystorze wynosi s10333,0 10 cl . Rezystor ten jest przyrządem w przybliżeniu skupionym dla sygnałów o częstotliwościach znacznie mniejszych niż GHz5,741 . Określenie „znacznie mniejszy” oznacza najczęściej w praktyce „mniejszy o jeden rząd”, czyli 10-krotnie. Dany rezystor jest przyrządem skupionym dla sygnałów o częstotliwościach do MHz750 .

Andrzej Leśnicki Układy liniowe i nieliniowe 1/1
Układy liniowe i nieliniowe Układ jest liniowy, gdy wykonywana przezeń operacja txFty jest operacją liniową, to znaczy jest jednorodna (homogeniczna)
txaFtaxF i addytywna F[x1(t)+x2(t)] = F[x1(t)] + F[x2(t)] W przeciwnym razie układ jest nieliniowy. W układach liniowych jest spełniona zasada superpozycji
txFatxFatxatxaF 22112211
txF ty L
tx1
tx2
txF
txF
tya 11
tya 22
tyP+
?Czy tyty PL
+
txa 11
txa 22
a) b)
Testowanie układu czy jest liniowy, czy nieliniowy Przykład 21. Układ wykonuje na sygnale operację podnoszenia do kwadratu 2xy . Mamy 2
2222211
21
21
22211 2 xaxaxaxaxaxayL
oraz 2
222
21
21 xaxayP
Układ jest nieliniowy, gdyż PL yy .

Andrzej Leśnicki Układy stałe w czasie i zmienne w czasie 1/1
Układy stałe w czasie i zmienne w czasie Jeżeli charakterystyka elementu nie zależy jawnie od czasu txF , to element nazywa się stałym w czasie (elementem stacjonarnym). Jeżeli charakterystyka elementu zależy jawnie od czasu ttxF , , to element nazywa się zmiennym w czasie (elementem niestacjonarnym) z ang. time-varying. Jeżeli układ jest zbudowany z elementów stałych w czasie, to jest układem stałym w czasie. Jeżeli układ zawiera elementy zmienne w czasie, to z reguły jest układem zmiennym w czasie (pod warunkiem, że elementy zmienne w czasie nie zostaną tak połączone, że zmienności w czasie skompensują się). W układzie stałym w czasie jest spełniona następująca zasada jeżeli tytx , to TtyTtx
tx tyL
?Czy Ttyty PL
TtyP Ttx tx tyP
a) b)
Opóźnienie o T
Opóźnienie o T F F
Testowanie układu czy jest stały, czy zmienny w czasie Przykład 22. Układ wykonuje na sygnale operację xtby . Mamy TtxtbtyL (1.19) oraz TtxTtbTtyP (1.20) Układ jest zmienny w czasie, gdyż Ttyty PL . W literaturze polskiej przyjęto oznaczać układy (lub elementy czy systemy) skupione, liniowe, stałe w czasie skrótem SLS.

Andrzej Leśnicki Układy stabilne i niestabilne 1/1
Układy stabilne i niestabilne Układ nie zawierający źródeł niezależnych jest stabilny, gdy dla każdego ograniczonego pobudzenia xMtxmax jego odpowiedź jest także ograniczona yMtymax . W przeciwnym razie układ jest niestabilny (wystarczy, że istnieje jedno ograniczone pobudzenie, dla którego odpowiedź jest nieograniczona). Przytoczona definicja stabilności układu jest stabilnością w sensie ograniczone wejście, ograniczone wyjście, w skrócie BIBO stabilność (z ang. Bounded Input Bounded Output). Jest to stabilność w skali makroskopowej, wynikająca z obserwacji sygnałów na zewnątrz układu, bez wnikania w zjawiska zachodzące wewnątrz układu. Oprócz tego istnieją definicje stabilności w skali mikroskopowej (będziemy się nimi zajmowali w dalszych rozdziałach), w których wnika się w zjawiska zachodzące wewnątrz układu. Przykład 23. Zbadamy stabilność poniższego układu.
3tx tx ty
Układ ten podnosi sygnał wejściowy do trzeciej potęgi. Jest to układ BIBO stabilny, gdyż dla każdego ograniczonego pobudzenia
xMtxmax , odpowiedź jest także ograniczona 33maxmax xMtxty
Andrzej Leśnicki Przepływ prądu przez rezystor 1/2
Przepływ prądu przez rezystor
la) b)S
E R
V
I IV
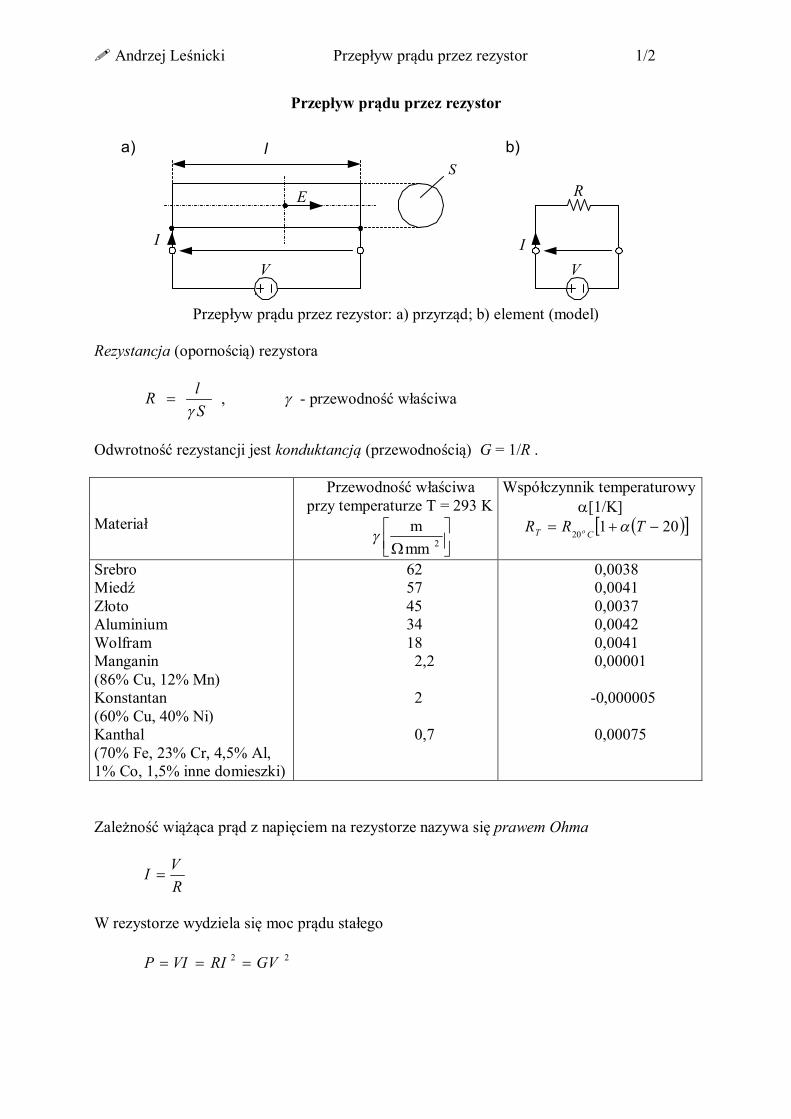
Przepływ prądu przez rezystor: a) przyrząd; b) element (model) Rezystancja (opornością) rezystora
SlR
, - przewodność właściwa
Odwrotność rezystancji jest konduktancją (przewodnością) G = 1/R . Materiał
Przewodność właściwa przy temperaturze T = 293 K
2mm
m
Współczynnik temperaturowy [1/K] 201
20 TRR CT o
Srebro Miedź Złoto Aluminium Wolfram Manganin (86% Cu, 12% Mn) Konstantan (60% Cu, 40% Ni) Kanthal (70% Fe, 23% Cr, 4,5% Al, 1% Co, 1,5% inne domieszki)
62 57 45 34 18 2,2 2 0,7
0,0038 0,0041 0,0037 0,0042 0,0041 0,00001 -0,000005 0,00075
Zależność wiążąca prąd z napięciem na rezystorze nazywa się prawem Ohma
RVI
W rezystorze wydziela się moc prądu stałego
22 GVRIVIP

Andrzej Leśnicki Przepływ prądu przez rezystor 2/2
Należy pamiętać, że obowiązuje powszechna umowa, iż zwrot prądu jest zgodny z ruchem ładunków dodatnich (a nie ujemnych, elektrony mają ładunki ujemne i poruszają się zawsze przeciwnie do zwrotu prądu). Tylko przy przeciwnych zwrotach prądu i napięcia na przyrządzie dodatnia wartość mocy jest mocą traconą na przyrządzie, a ujemna wartość mocy jest interpretowana jako moc wydawana przez przyrząd na zewnątrz do dołączonego układu. Napięcie V występuje jednocześnie na źródle napięciowym i na rezystorze. Każdorazowo ma inną interpretację. Napięcie V na źródle napięciowym nazywa się siłą elektromotoryczną SEM (ang. electromotoric force , EMF), gdyż jest siłą wymuszającą przepływ prądu. Źródłami SEM są ogniwa Volty, generatory, termopary, fotoogniwa, itp. przyrządy zamieniające energię chemiczną, mechaniczną, cieplną, świetlną na energię elektryczną. Napięcie V na rezystorze nazywa się spadkiem napięcia o wartości wynikającej z prawa Ohma. Jeżeli napięcie rezystora tv jest zmienne, to zmienne jest także natężenie pola elektrycznego tE , gęstość prądu t , prąd ti , a prawo Ohma dla sygnałów zmiennych ma taką samą postać jak dla sygnałów stałych
)( )()( tvGRtvti
Zależność wiążąca sygnały na końcówkach rezystora jest zależnością algebraiczną i dlatego rezystor nazywa się elementem bezinercyjnym (nie jest elementem dynamicznym). Rezystor pobiera moc chwilową
022 tGvtRititvtp 0R , 0G
która jest nieujemna. Moc chwilowa jest pierwszą pochodną energii chwilowej
ttwtp
d)(d)(
i energia chwilowa pobrana przez rezystor w przedziale czasu od 0t do t wyraża się wzorem całkowym
d)( d)( d )(,0
2
0 0
20
tt t
RRt
vGt t
iRpttww
i jest niemalejącą funkcją czasu. Oznacza to, że rezystor o rezystancji dodatniej nie może wydawać energii, a jedynie pobierać ją z dołączonego układu (energia ta zamienia się w rezystorze bezpowrotnie na ciepło). Dlatego rezystor nazywa się elementem stratnym (dyssypatywnym). Przykład 24
Andrzej Leśnicki Indukcja elektryczna w kondensatorze 1/2
Indukcja elektryczna w kondensatorze a)
b)
Q Q
Sd
E
I
V
C
I
V
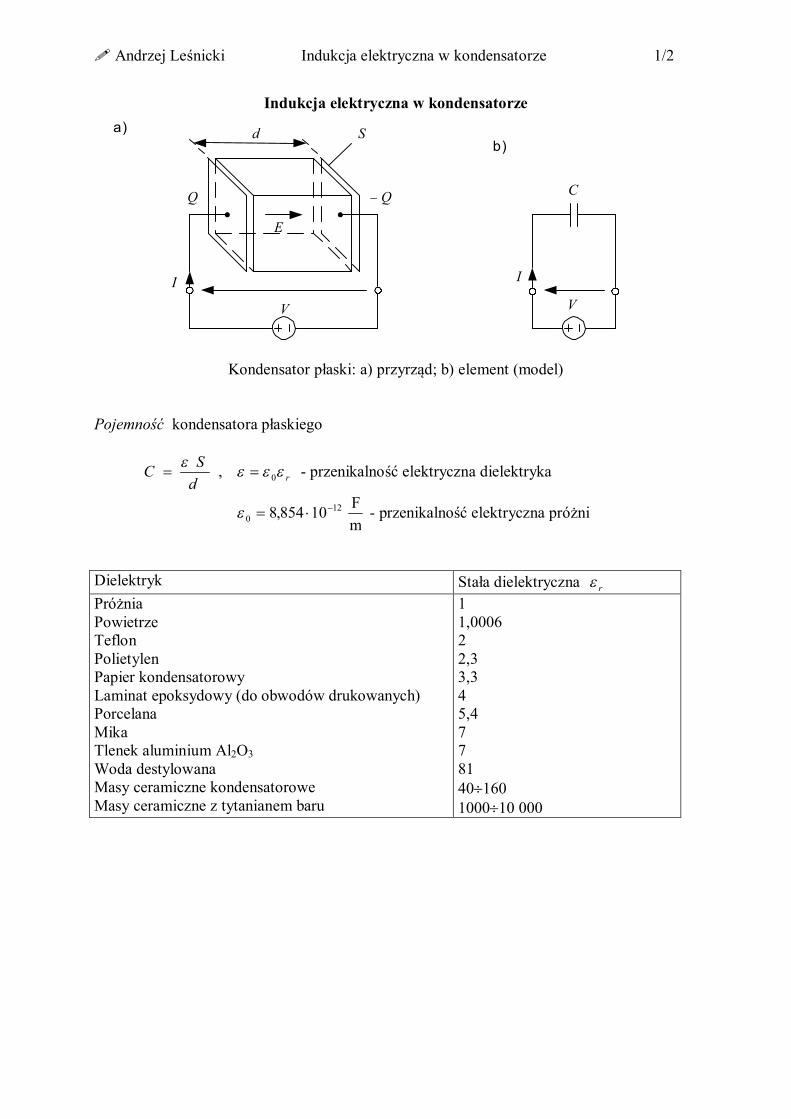
Kondensator płaski: a) przyrząd; b) element (model) Pojemność kondensatora płaskiego
dSC , r 0 - przenikalność elektryczna dielektryka
mF10854,8 12
0 - przenikalność elektryczna próżni
Dielektryk Stała dielektryczna r Próżnia Powietrze Teflon Polietylen Papier kondensatorowy Laminat epoksydowy (do obwodów drukowanych) Porcelana Mika Tlenek aluminium Al2O3 Woda destylowana Masy ceramiczne kondensatorowe Masy ceramiczne z tytanianem baru
1 1,0006 2 2,3 3,3 4 5,4 7 7 81 40160 100010 000

Andrzej Leśnicki Indukcja elektryczna w kondensatorze 2/2
Jeżeli do kondensatora zostanie przyłożone zmienne napięcie tv , to zmienne będą także pole elektryczne tE , ładunek elektryczny tCvtq i zgodnie z pierwszym równaniem Maxwella przez kondensator popłynie prąd przesunięcia
dt
tdvCdt
tdqti
Ponieważ na kondensatorze zachodzi operacja różniczkowania sygnału, to jest on nazywany elementem dynamicznym. Zależność odwrotna do powyższej ma następującą postać
)()d(110
0
tviC
tqC
tvt
t
Bieżąca wartość napięcia tv może być obliczona tylko wtedy, kiedy zapamiętano początkową wartość napięcia 0tv . Dlatego kondensator nazywa się elementem inercyjnym (z pamięcią). Z kondensatorem jest związana moc chwilowa
ttvtCvtitvtp
d)(d
i energia chwilowa
022
0 21
21,
00
tCvtCvvdvCdpttwwtv
tv
t
tCC
Z powyższego wzoru wynika, że wartość energii kondensatora nie zależy od sposobu zmian napięcia w przedziale czasu tt ,0 , a jedynie od wartości początkowej 0tv i końcowej tv napięcia. Energia akumuluje się w polu elektrycznym kondensatora (nie ma fizycznej możliwości zamiany energii na ciepło, czy inną postać energii). Dlatego kondensator nazywa się elementem bezstratnym (reaktancyjnym, konserwatywnym, zachowawczym). Przykład 25
Andrzej Leśnicki Indukcja magnetyczna w induktorze 1/2
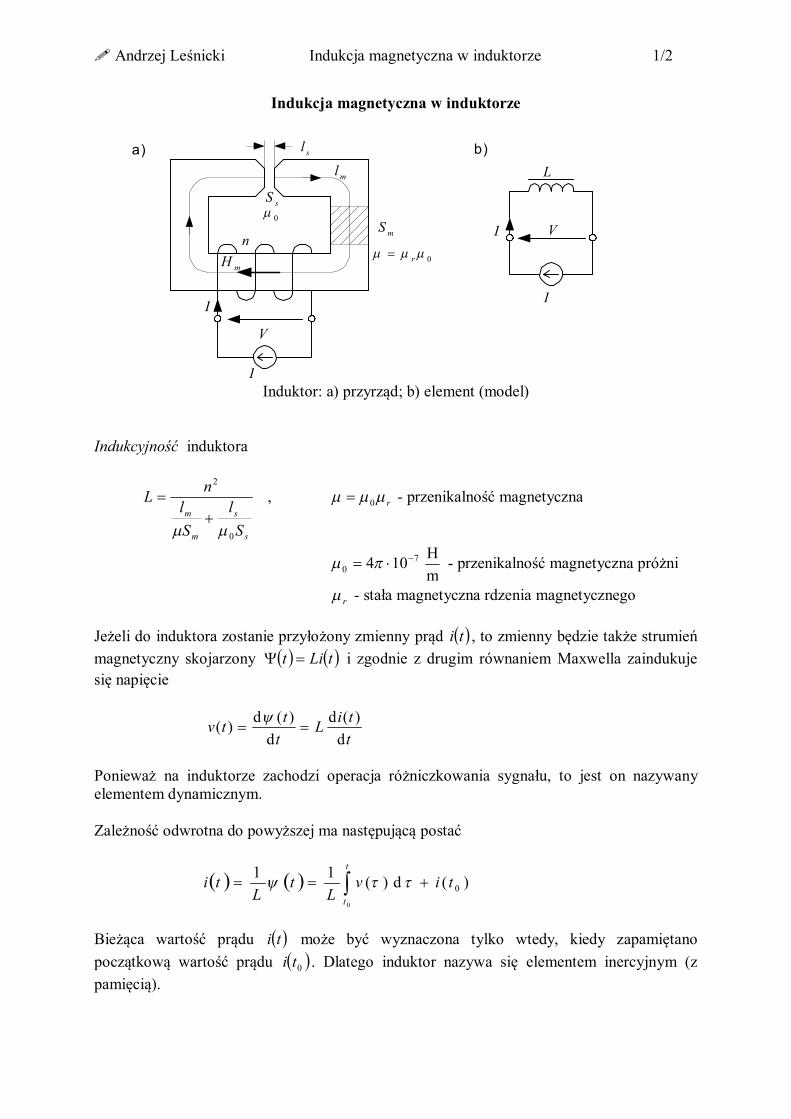
Indukcja magnetyczna w induktorze
mH
mlsl
mS
0 r
sS0
n
a) b)
I
V
V
I
I
I
L
Induktor: a) przyrząd; b) element (model) Indukcyjność induktora
s
s
m
m
Sl
Sl
nL
0
2
, r 0 - przenikalność magnetyczna
mH104 7
0 - przenikalność magnetyczna próżni
r - stała magnetyczna rdzenia magnetycznego
Jeżeli do induktora zostanie przyłożony zmienny prąd ti , to zmienny będzie także strumień magnetyczny skojarzony tLit i zgodnie z drugim równaniem Maxwella zaindukuje się napięcie
ttiL
tttv
d)(d
d)(d)(
Ponieważ na induktorze zachodzi operacja różniczkowania sygnału, to jest on nazywany elementem dynamicznym. Zależność odwrotna do powyższej ma następującą postać
)( d )(11
0
0 t
t
tivL
tL
ti
Bieżąca wartość prądu ti może być wyznaczona tylko wtedy, kiedy zapamiętano początkową wartość prądu 0ti . Dlatego induktor nazywa się elementem inercyjnym (z pamięcią).

Andrzej Leśnicki Indukcja magnetyczna w induktorze 2/2
Z induktorem jest związana moc chwilowa
ttitLititvtp
d)(d
i energia chwilowa
022
)(
)(0 2
121d ,
00
tLitLiiiLdpttwwti
ti
t
tLL
Z powyższego wzoru wynika, że wartość energii induktora nie zależy od sposobu zmian prądu w przedziale czasu tt ,0 , a jedynie od wartości początkowej 0ti i końcowej ti prądu. Energia akumuluje się w polu magnetycznym induktora (nie ma fizycznej możliwości zamiany energii na ciepło lub inną formę energii). Dlatego induktor nazywa się elementem bezstratnym (reaktancyjnym, konserwatywnym, zachowawczym). Przykład 26
Andrzej Leśnicki Prawo rozpływu prądów 1/1
Prawo rozpływu prądów
1i
8i
2i
7i 6i
5i
4i
3i
A
a) b)
1i
2i
3i
4i
5i
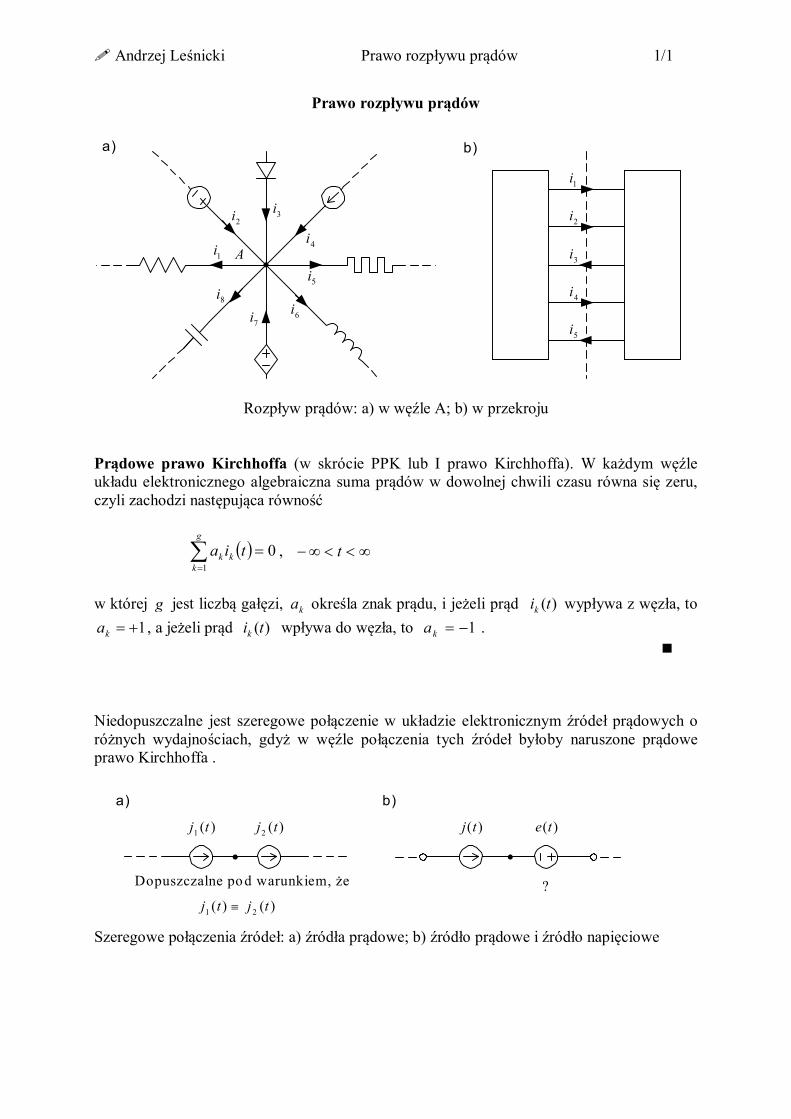
Rozpływ prądów: a) w węźle A; b) w przekroju Prądowe prawo Kirchhoffa (w skrócie PPK lub I prawo Kirchhoffa). W każdym węźle układu elektronicznego algebraiczna suma prądów w dowolnej chwili czasu równa się zeru, czyli zachodzi następująca równość
01
g
kkk tia , t
w której g jest liczbą gałęzi, ka określa znak prądu, i jeżeli prąd )(tik wypływa z węzła, to
1ka , a jeżeli prąd )(tik wpływa do węzła, to 1ka . Niedopuszczalne jest szeregowe połączenie w układzie elektronicznym źródeł prądowych o różnych wydajnościach, gdyż w węźle połączenia tych źródeł byłoby naruszone prądowe prawo Kirchhoffa .
Szeregowe połączenia źródeł: a) źródła prądowe; b) źródło prądowe i źródło napięciowe
)()( 21 tjtj
)(1 tj )(2 tj )(tj )(te
a) b)
?Dopuszczalne pod warunkiem, że
Andrzej Leśnicki Prawo rozkładu napięć 1/1
Prawo rozkładu napięć
A
AV
1v
2v
3v 4v
5v
6vB
C
D
E
F
VB = VA + v1
VC = VA + v1 - v2
VD = VA + v1 - v2 + v3
VE = VA + v1 - v2 + v3 - v4
VF = VA + v1 - v2 + v3 - v4 - v5
VA = VA + v1 - v2 + v3 - v4 - v5 - v6
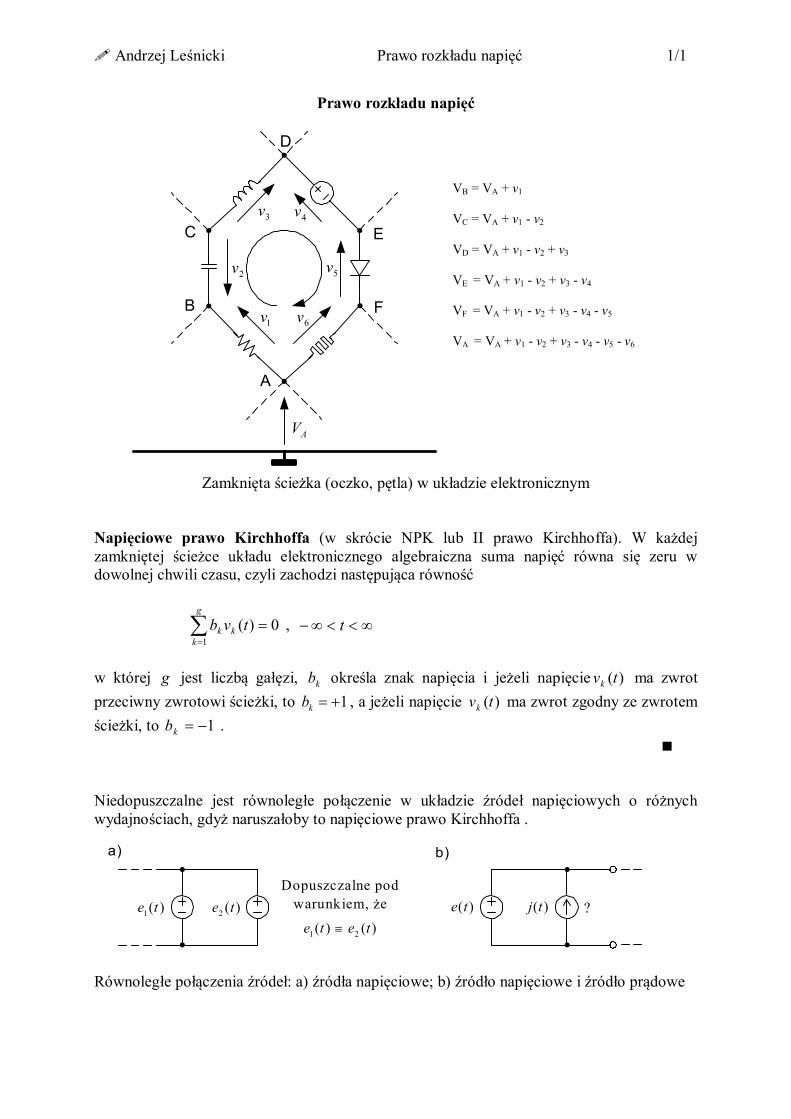
Zamknięta ścieżka (oczko, pętla) w układzie elektronicznym
Napięciowe prawo Kirchhoffa (w skrócie NPK lub II prawo Kirchhoffa). W każdej zamkniętej ścieżce układu elektronicznego algebraiczna suma napięć równa się zeru w dowolnej chwili czasu, czyli zachodzi następująca równość
0)(1
g
kkk tvb , t
w której g jest liczbą gałęzi, kb określa znak napięcia i jeżeli napięcie )(tvk ma zwrot przeciwny zwrotowi ścieżki, to 1kb , a jeżeli napięcie )(tvk ma zwrot zgodny ze zwrotem ścieżki, to 1kb . Niedopuszczalne jest równoległe połączenie w układzie źródeł napięciowych o różnych wydajnościach, gdyż naruszałoby to napięciowe prawo Kirchhoffa .
Równoległe połączenia źródeł: a) źródła napięciowe; b) źródło napięciowe i źródło prądowe
)()( 21 tete
)(1 te )(2 te
a) b)
)(te )(tj ?Dopuszczalne pod
warunkiem, że

Andrzej Leśnicki Topologiczne właściwości układu 1/7
Topologiczne właściwości układu Graf strukturalny układu obrazuje strukturę (topologię) układu (nosi on też nazwę grafu liniowego skierowanego). Obowiązuje umowa, że zwrot gałęzi grafu jest jednocześnie zwrotem prądu gałęzi tik . Zwrotu napięcia gałęzi tvk nie rysuje się, gdyż zgodnie z umową jest on przeciwny zwrotowi prądu tik . Układ i jego graf są zbudowane z g gałęzi i w węzłów.
a) b)
1 12 2
3 3
4 4
1
2
3
4
51E
2R
3C
4L
5R45
wg
c)
d)
Układ: a) schemat układu; b) graf strukturalny układu; c) drzewa grafu z rozcięciami; d) przeciwdrzewa grafu z obwodami Graf jest spójny, gdy istnieje ścieżka między każdymi dwoma węzłami, w przeciwnym razie graf jest rozłączny. Ścieżkę zamkniętą nazywamy obwodem (cyklem, pętlą). Drzewem grafu nazywamy każdy podgraf spójny zawierający wszystkie węzły grafu i nie zawierający obwodów (drzewo składa się z 1w gałęzi). Gałęzie nie należące do drzewa tworzą przeciwdrzewo (przeciwdrzewo składa się z 1 wg gałęzi). Przez każdą gałąź drzewa można poprowadzić takie rozcięcie grafu na dwie części (linie przerywane na rys. c), że w skład rozcięcia oprócz jednej gałęzi drzewa wchodzą tylko gałęzie przeciwdrzewa. Algebraiczna suma prądów gałęzi rozcięcia równa się zeru z prądowego prawa Kirchhoffa. Każdej gałęzi przeciwdrzewa odpowiada taki obwód (rys. d), że w skład obwodu oprócz jednej gałęzi przeciwdrzewa wchodzą tylko gałęzie drzewa. Algebraiczna suma napięć gałęzi obwodu równa się zeru z napięciowego prawa Kirchhoffa.

Andrzej Leśnicki Topologiczne właściwości układu 2/7
Równania bilansu prądów w węzłach (wynikające z prądowego prawa Kirchhoffa - PPK) dogodnie jest zapisać w formie macierzowej gałęzie węzły 1 2 3 4 5
000
100
110
000110011
321
5
4
3
2
1
iiiii
, tj. 0
00
54
432
21
iiiii
ii
i jeszcze bardziej skrótowo
0Ai gdzie macierz strukturalna ijaA nazywa się macierzą incydencji ( 1ija , gdy j-ta gałąź jest incydentna z węzłem i oraz skierowana od tego węzła; 1ija , gdy j-ta gałąź jest incydentna z węzłem i oraz skierowana do tego węzła; 0ija , gdy j-ta gałąź nie jest incydentna z węzłem i). Równanie (1.75) jest dogodnym, skrótowym zapisem równań układu wynikających z PPK. Dowodzi się, że macierz A jest rzędu 1w . Wniosek. Dla każdego układu elektronicznego można napisać 1w niezależnych równań wynikających z PPK. W układzie z rys. a mamy 31w i napisano trzy niezależne równania bilansu prądów odpowiadające trzem węzłom 1, 2, 3. Gdyby napisano jeszcze czwarte równanie dla węzła 4, to nie wniosłoby ono nic nowego, gdyż byłoby kombinacją liniową już napisanych równań. W układzie elektronicznym i jego grafie można wyznaczyć zamknięte ścieżki, które jak już wspomniano nazywają się obwodami lub oczkami w przypadku obwodów bez gałęzi wewnętrznych. Na przykład na poniższym rysunku pokazano oczka a i b.
a) b)
1 12 2
3 3
4 4
1
2
3
4
51E
2R
3C
4L
5R
a b
4
5
w
g
Przykład układu z dwoma oczkami

Andrzej Leśnicki Topologiczne właściwości układu 3/7
Równania bilansu napięć w obwodach (wynikające z napięciowego prawa Kirchhoffa - NPK) dogodnie jest zapisać w formie macierzowe gałęzie oczka 1 2 3 4 5
00
1110000111
5
4
3
2
1
vvvvv
ba
, tj. 00
543
321
vvvvvv
i jeszcze bardziej skrótowo 0Bv gdzie macierz strukturalna ijbB nazywa się macierzą obwodową ( 1ijb , gdy j-ta gałąź należy do i-tego obwodu i jest skierowana zgodnie ze zwrotem obwodu; 1ijb , gdy j-ta gałąź należy do i-tego obwodu i jest skierowana przeciwnie do zwrotu obwodu; 0ijb , gdy j-ta gałąź nie należy do i-tego obwodu). Równanie powyższe jest dogodnym, skrótowym zapisem równań układu wynikających z NPK. Dowodzi się, że macierz B jest rzędu )1( wg . Wniosek. Dla każdego układu elektronicznego można napisać )1( wg niezależnych równań wynikających z NPK. W powyższym układzie mamy 2)1( wg i napisano dwa niezależne równania odpowiadające dwóm oczkom a, b. Gdyby napisano jeszcze trzecie równanie dla zamkniętej ścieżki, np. obwodu zbudowanego z gałęzi 1, 2, 4, 5, to nie wniosłoby ono nic nowego, gdyż byłoby kombinacją liniową już napisanych równań. Jeżeli układ elektroniczny składa się z g gałęzi, to mówimy, że układ został przeanalizowany, gdy zostały obliczone prądy i napięcia wszystkich gałęzi. Oznacza to, że aby przeanalizować układ należy ułożyć g2 niezależnych równań z g2 niewiadomymi (niewiadomymi jest g napięć i g prądów gałęzi). Okazuje się, że jest to dokładnie tyle równań ile można ułożyć z trzech podstawowych praw: 1w równań z prądowego prawa Kirchhoffa 0Ai )1( wg równań z napięciowego prawa Kirchhoffa 0Bv g równań z pr. Ohma (tj. równań wiążących prąd i napięcie gałęzi np. Riv ) Razem 2g niezależnych równań z 2g niewiadomymi (g prądów i g napięć gałęzi) Sposób analizy układów elektronicznych polegający na ułożeniu i rozwiązaniu tego układu
g2 równań nazywa się metodą tableau. W metodzie tej występuje bardzo liczny układ równań (najbardziej liczny z możliwych) i należy poszukiwać metod układania mniej licznych układów równań niezależnych, z mniejszą liczbą niewiadomych.

Andrzej Leśnicki Topologiczne właściwości układu 4/7
4
21 3
1
2
3
4
524v34v14v
ai bi4
5
w
g
2)1(
31
wg
w
b
am i
ii
34
24
14
v
v
v
nv
Graf z zaznaczonymi prądami oczkowymi mi (jest ich 21 wg ) i napięciami węzłowymi nv (jest ich 31w ) Wykazuje się, że prądy gałęzi i są kombinacjami liniowymi prądów oczkowych mi (indeks m z angielskiej nazwy oczka mesh) m
TiBi Na przykład dla powyższego układu z prądami oczkowymi ai , bi mamy
b
b
ba
a
a
b
a
ii
iiii
ii
iiiii
101011
0101
5
4
3
2
1
Liczba prądów oczkowych 21 wg jest znacznie mniejsza niż liczba 102 g . Dlatego gdyby udało się opracować metodę układania niezależnych równań z prądami oczkowymi jako jedynymi niewiadomymi, to znacznie ułatwiłoby to analizę układu elektronicznego. Zamiast rozwiązywać układ 102 g równań (jak w metodzie tableau), wystarczyłoby rozwiązać mniej liczny układ 21 wg równań, a znając prądy oczkowe obliczyć prądy wszystkich gałęzi m
TiBi , i na koniec znając prądy gałęzi obliczyć z prawa Ohma napięcia gałęzi. Taka metoda analizy istnieje i nazywa się metodą prądów oczkowych (inaczej metoda Maxwella). Wykazuje się, że napięcia gałęzi v są kombinacjami liniowymi napięć węzłowych nv (indeks n z angielskiej nazwy węzła node) n
T vAv Na przykład dla powyższego układu z napięciami węzłowymi 14v , 24v , 34v mamy

Andrzej Leśnicki Topologiczne właściwości układu 5/7
34
3424
24
2414
14
34
24
14
5
4
3
2
1
100110
010011001
vvv
vvv
v
vvv
vvvvv
Liczba napięć węzłowych 31w jest znacznie mniejsza niż liczba 102 g . Dlatego gdyby udało się opracować metodę układania niezależnych równań z napięciami węzłowymi jako jedynymi niewiadomymi, to znacznie ułatwiłoby to analizę układu elektronicznego. Zamiast rozwiązywać układ 102 g równań (tak jak w metodzie tableau), wystarczyłoby rozwiązać mniej liczny układ 31w równań, a znając napięcia węzłowe obliczyć napięcia wszystkich gałęzi n
T vAv , i na koniec znając napięcia gałęzi obliczyć z prawa Ohma prądy gałęzi. Taka metoda analizy istnieje i nazywa się metodą napięć węzłowych (inaczej metoda Coltriego). Scharakteryzujemy metodę prądów oczkowych i metodę napięć węzłowych na najprostszym przykładzie układu liniowego rezystancyjnego. Będziemy posługiwali się pojęciem gałęzi złożonej, w której oprócz rezystora dopuszczono możliwość wystąpienia niezależnego źródła napięciowego i (lub) prądowego. Napięcia i prądy gałęzi zostaną zestawione w wektorach v , E , i , J , a rezystancje i konduktancje gałęzi w macierzach diagonalnych R , G .
ti ti
tv tv
GR 1 E
J
a) b) JiREv
EvGJi
Gałąź złożona: a) konwencja zwrotów (zwrot napięcia przeciwny zwrotowi prądu); b) zwroty wewnętrznych niezależnych źródeł Metoda prądów oczkowych (metoda Maxwella). Jeżeli wszystkie gałęzie mają opis rezystancyjny JiREv , to równania z NPK można przedstawić w poniższej postaci 0iBRBRJEBBRiRJEBJiREBBv m
T Jest to układ 1 wg równań z tylu samymi niewiadomymi (prądami oczkowymi mi ), przyjmujący w zapisie macierzowym następującą postać ERJBiR mm (met. prądów oczkowych) gdzie macierz T
m BRBR nazywa się macierzą rezystancji oczkowych.
Andrzej Leśnicki Topologiczne właściwości układu 6/7
Metoda napięć węzłowych (metoda Coltriego). Jeżeli wszystkie gałęzie mają opis konduktancyjny EvGJi , to równania z PPK można przedstawić tak jak poniżej 0vAGAGEJAAGvGEJAEvGJAAi n
T Jest to układ 1w równań z tylu samymi niewiadomymi (napięciami węzłowymi nv ), przyjmujący w zapisie macierzowym następującą postać JGEAvG nn (met. napięć węzłowych) gdzie macierz T
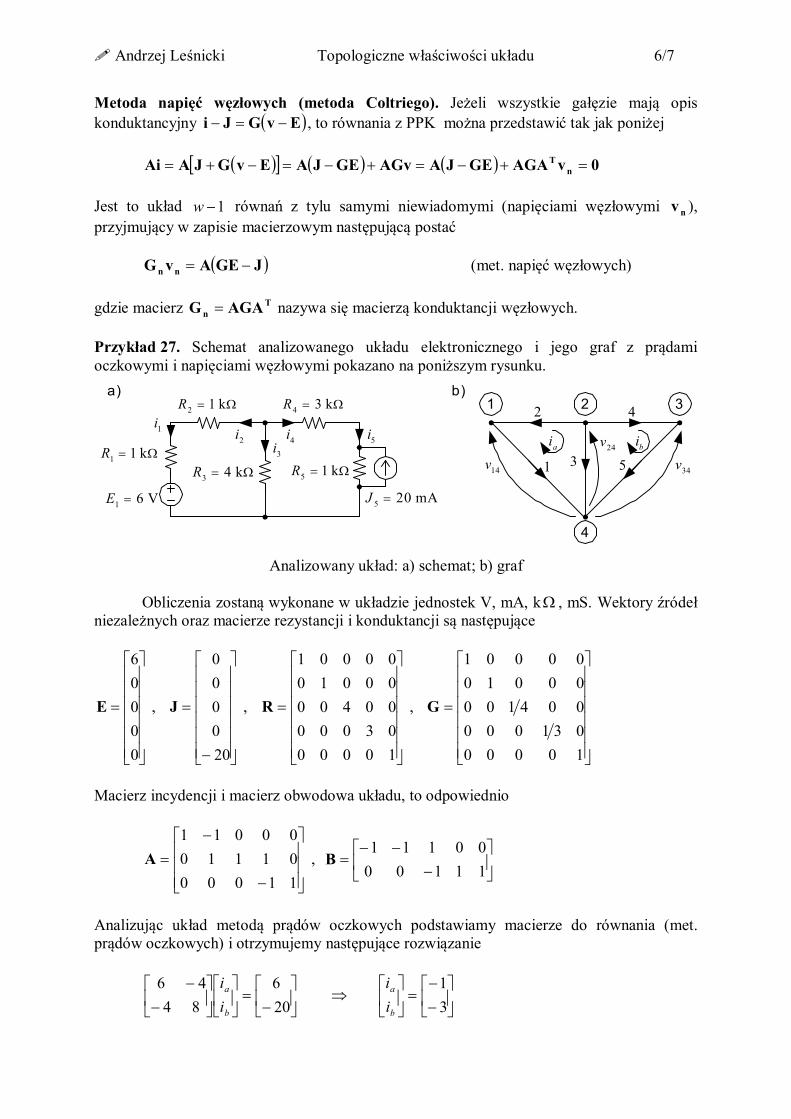
n AGAG nazywa się macierzą konduktancji węzłowych. Przykład 27. Schemat analizowanego układu elektronicznego i jego graf z prądami oczkowymi i napięciami węzłowymi pokazano na poniższym rysunku.
V61 E mA205 J
k11R
k12R
k43R
k34R
k15R
1i2i
3i4i 5i
1 2
4
3
1
2
3
4
514v 34v24v
a) b)
ai bi
Analizowany układ: a) schemat; b) graf Obliczenia zostaną wykonane w układzie jednostek V, mA, k , mS. Wektory źródeł niezależnych oraz macierze rezystancji i konduktancji są następujące
00006
E ,
200000
J ,
1000003000004000001000001
R ,
100000310000041000001000001
G
Macierz incydencji i macierz obwodowa układu, to odpowiednio
110000111000011
A ,
1110000111
B
Analizując układ metodą prądów oczkowych podstawiamy macierze do równania (met. prądów oczkowych) i otrzymujemy następujące rozwiązanie
206
8446
b
a
ii
31
b
a
ii
Andrzej Leśnicki Topologiczne właściwości układu 7/7
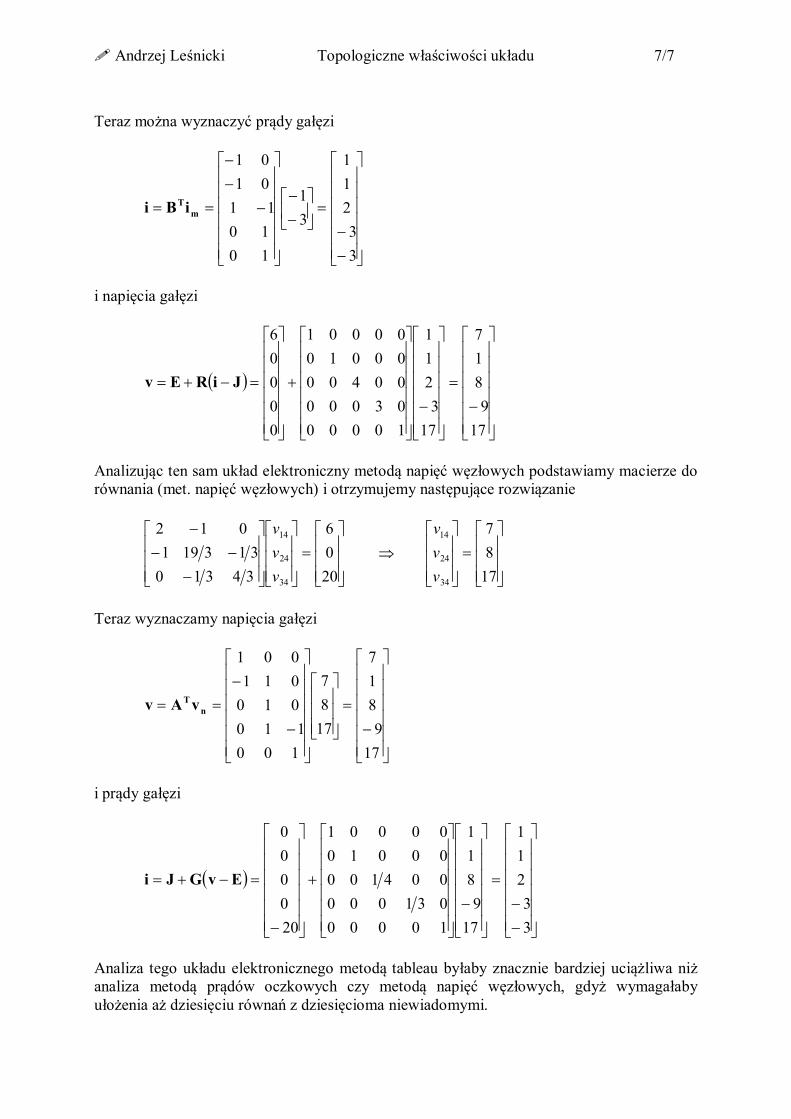
Teraz można wyznaczyć prądy gałęzi
33
211
31
101011
0101
mTiBi
i napięcia gałęzi
179
817
173
211
1000003000004000001000001
00006
JiREv
Analizując ten sam układ elektroniczny metodą napięć węzłowych podstawiamy macierze do równania (met. napięć węzłowych) i otrzymujemy następujące rozwiązanie
2006
34310313191
012
34
24
14
vvv
1787
34
24
14
vvv
Teraz wyznaczamy napięcia gałęzi
179
817
1787
100110
010011001
nT vAv
i prądy gałęzi
33
211
179
811
100000310000041000001000001
200000
EvGJi
Analiza tego układu elektronicznego metodą tableau byłaby znacznie bardziej uciążliwa niż analiza metodą prądów oczkowych czy metodą napięć węzłowych, gdyż wymagałaby ułożenia aż dziesięciu równań z dziesięcioma niewiadomymi.

Andrzej Leśnicki Prawo zachowania mocy i twierdzenie Tellegena 1/2
Prawo zachowania mocy i twierdzenie Tellegena Fizyczne systemy spełniają zasadę zachowania energii. W przypadku układów elektronicznych zasada ta przyjmuje postać prawa zachowania mocy mówiącego, że jeżeli w układzie elektronicznym jest spełnione jedno z praw Kirchhoffa, to algebraiczna suma mocy chwilowych wszystkich gałęzi równa się zeru w każdej chwili czasu
01 1
viiv TTg
k
g
kkkk titvtptp , ,t
Dowód jest następujący. Obliczając sumę mocy chwilowych gałęzi z uwzględnieniem właściwości topologicznych układu (pamiętajmy przy tym, że w rachunku macierzowym zachodzi zależność TTT GHGH ), mamy 0 m
Tm
TTT iBviBvivtp , gdyż 0Bv z NPK lub 0 AivivAiv T
nT
nTTtp , gdyż 0Ai z PPK
Tak więc spełnianie przez system napięciowego lub prądowego prawa Kirchhoffa jest warunkiem dostatecznym bilansowania się mocy chwilowych tego systemu. Przykład 28. W poniższych układach są znane wartości napięć i prądów gałęzi (zestawiono je w wektorach ai , av oraz bi , bv używając jednostek odpowiednio mA i V ze zwrotami jak w grafie na rys. c).
44
2 21 3 1 3
2 31
4
a) b)
c)
1
2
3
4
6
5
2
1
1
3
2
2
ai
4
4
1
3
2
5
av
1
4
3
2
1
1
bi
5
5
3
2
1
3
bv
k12R k14R
V51 E
V46 E
V12 E V34 E
mA33 J
mA45 J
k45R
k31R
k13R
k56R
Badanie układów: a) układ; b) układ o identycznej topologii; c) graf identyczny dla obu układów

Andrzej Leśnicki Prawo zachowania mocy i twierdzenie Tellegena 2/2
W układzie z rys. a jest spełniony bilans mocy
0mW8-mW4mW1mW9mW4mW10654321 ERRJRE PPPPPP Podobnie w układzie z rys. b jest także spełniony bilans mocy
0mW5mW20-mW9mW4mW1-mW3654321 RJERER PPPPPP Ze sposobu dowodzenia prawa zachowania mocy wynika, że suma iloczynów prądów i napięć gałęzi będzie bilansowała się także wtedy, kiedy prądy gałęzi zostaną wzięte z jednego układu, a napięcia gałęzi z innego układu, byle tylko oba układy miały jednakową topologię. Tak więc, jeżeli jeden układ ma prądy i napięcia gałęzi ai , av oraz macierz incydencji aA i macierz obwodową aB , to drugi układ mający prądy i napięcia gałęzi bi , bv musi mieć taką samą macierz incydencji ab AA i macierz obwodową ab BB . Oznacza to, że oba układy mają jednakowy graf strukturalny. Dla takiej pary układów mamy
0 bm
Taa
bm
Tab
bm
Tb
Tab
Ta ivBivBiBviv , gdyż 0vB aa z NPK
lub 0 b
nT
aabn
Tab
bn
Tb
Tab
Ta viAviAvAivi , gdyż 0iA aa z PPK
Powyższe wyniki ujmuje następujące twierdzenie sformułowane przez Tellegena. Twierdzenie Tellegena. Jeżeli jeden układ o prądach i napięciach gałęzi ai , av ma taki sam graf strukturalny jak drugi układ o prądach i napięciach gałęzi bi , bv , to suma iloczynów prądów i napięć, gdzie prądy są brane z jednego układu, a napięcia z drugiego układu, równa się zeru w każdej chwili czasu 0 a
Tba
Tbb
Tab
Ta viivviiv , ,t
W twierdzeniu Tellegena iloczyny prądów i napięć nie mogą być interpretowane jako moce, gdyż napięcie i prąd są brane z dwóch różnych gałęzi różnych układów. Przykład 29. Układy z rys. a,b mają taką samą topologię, strukturę. Oba układy mają taki sam graf strukturalny, ich macierze incydencji i obwodowe są takie same ba AA , ba BB . Dlatego mimo, że oba układy mają zupełnie różniące się gałęzie o różniących się wartościach prądów i napięć, to sumy iloczynów prądów z jednego układu i napięć z drugiego układu równają się zeru
0144431231215
0525131231232
bTa
bTa
ivvi
Andrzej Leśnicki Dwójniki 1/6
Dwójniki Właściwości układu elektronicznego zależą od właściwości elementów elektronicznych, z których są one zbudowane. Należy dokładnie poznać właściwości elementów, jako części składowych układu. Najprostszym, najmniej skomplikowanym elementem jest dwójnik. Dwójnik jest zdefiniowany jako element z dwiema końcówkami, zaciskami. Jest to najmniejsza liczba zacisków jaką może posiadać element.
)(tq
)(t
)()( tqti
)()()()( ttvtvtv BA
)(ti
A
B
tititi BA
Dwójnik skupiony
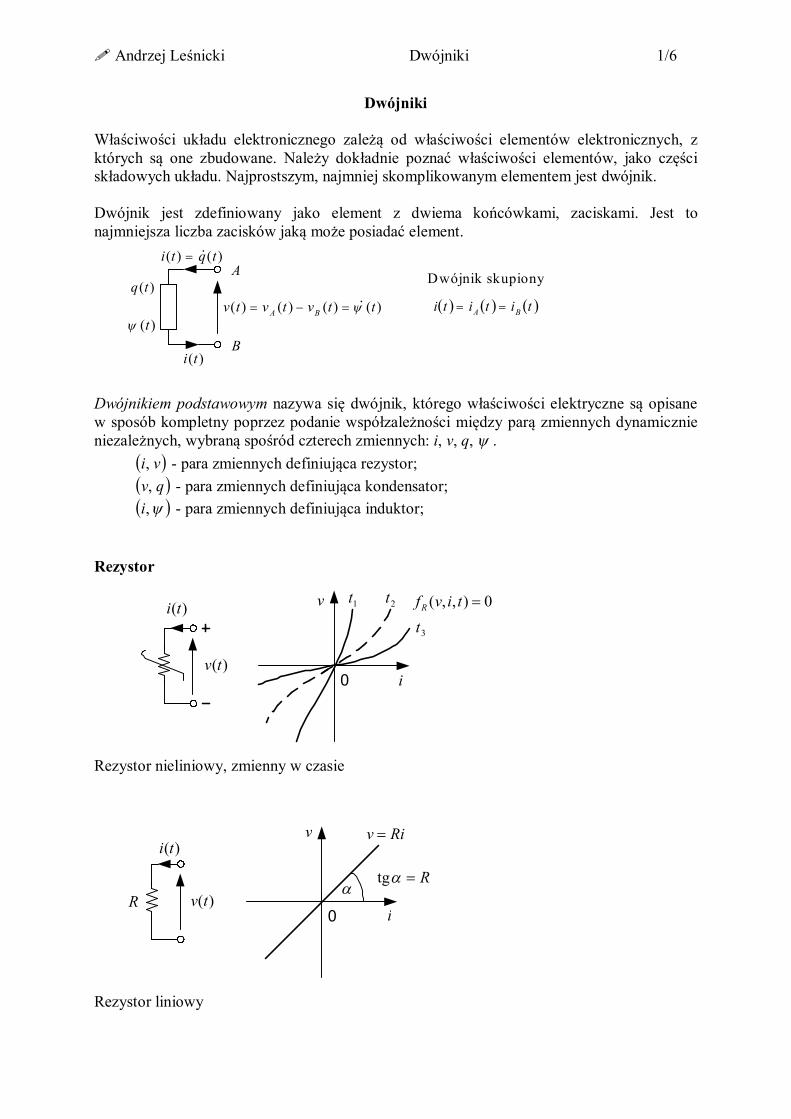
Dwójnikiem podstawowym nazywa się dwójnik, którego właściwości elektryczne są opisane w sposób kompletny poprzez podanie współzależności między parą zmiennych dynamicznie niezależnych, wybraną spośród czterech zmiennych: i, v, q, . vi, - para zmiennych definiująca rezystor;
qv, - para zmiennych definiująca kondensator; ,i - para zmiennych definiująca induktor; Rezystor
0
)(ti
)(tv
v 1t 2t
3t
i
0),,( tivfR
Rezystor nieliniowy, zmienny w czasie
0
)(ti
)(tvR
v
i
Rtg
Riv
Rezystor liniowy
Andrzej Leśnicki Dwójniki 2/6
0
)(iR
)(ti
)(tv
v
V
iI
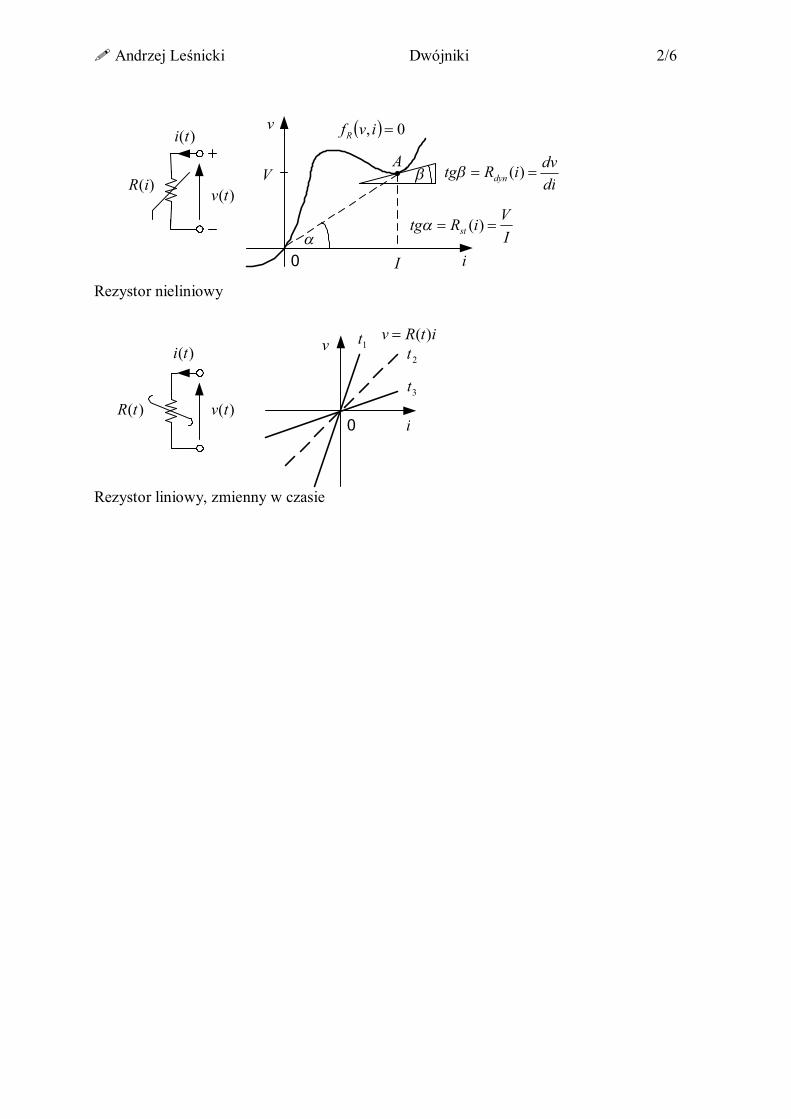
AdidviRtg dyn )(
IViRtg st )(
0, ivfR
Rezystor nieliniowy
0)(tR )(tv
)(ti
i
vitRv )(
2t1t
3t
Rezystor liniowy, zmienny w czasie
Andrzej Leśnicki Dwójniki 3/6
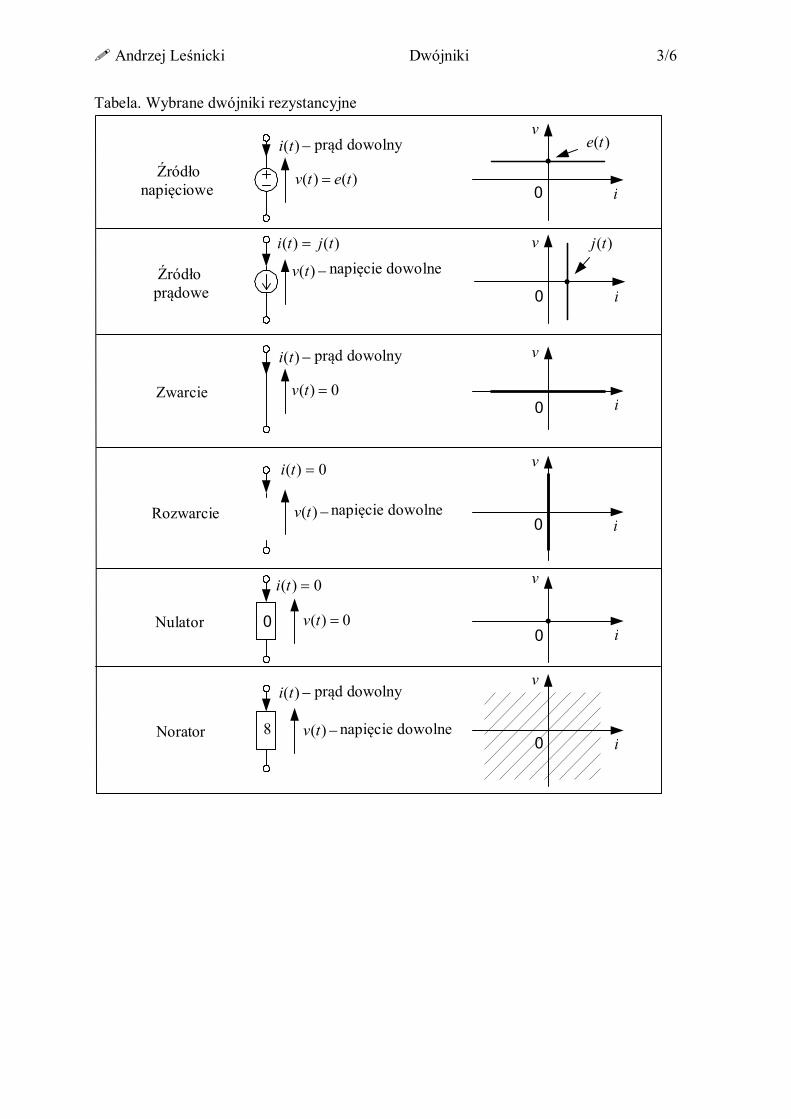
Tabela. Wybrane dwójniki rezystancyjne
0
0
0
0
00
)(ti
)()( tetv
v
i
)(te
)()( tjti
)(tv
)(tjv
i
)(ti
0)( tv
v
i
0)( ti
)(tv
v
i
0)( ti
0)( tv
v
i
v
i)(tv
)(ti
prąd dowolny
napięcie dowolne
prąd dowolny
napięcie dowolne
napięcie dowolne
prąd dowolny
Źródło napięciowe
Źródło prądowe
Rozwarcie
Zwarcie
Nulator
Norator 0
8
Andrzej Leśnicki Dwójniki 4/6
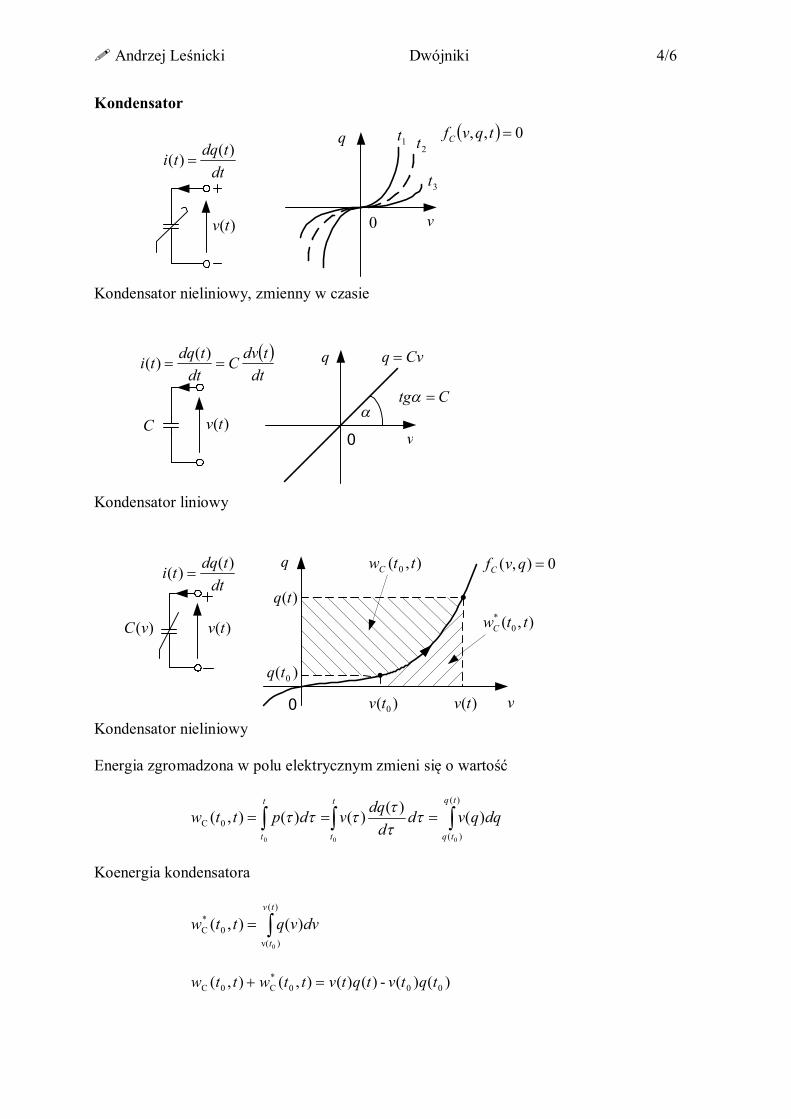
Kondensator
0
dttdqti )()(
)(tv
q
v
1t2t
3t
0,, tqvfC
Kondensator nieliniowy, zmienny w czasie
0C )(tv
v
dt
tdvCdt
tdqti )()( q
Ctg
Cvq
Kondensator liniowy
0
dttdqti )()(
)(tv)(vC
v
q
)(tq
)( 0tq
)( 0tv )(tv
),( 0 ttwC
),( 0* ttwC
0),( qvfC
Kondensator nieliniowy Energia zgromadzona w polu elektrycznym zmieni się o wartość
)(
)(0C
000
)()()()(),(tq
tq
t
t
t
t
dqqvdd
dqvdpttw
Koenergia kondensatora
)(
)v(0
*C
0
)(),(tv
t
dvvqttw
)()(-)()(),(),( 000
*C0C tqtvtqtvttwttw
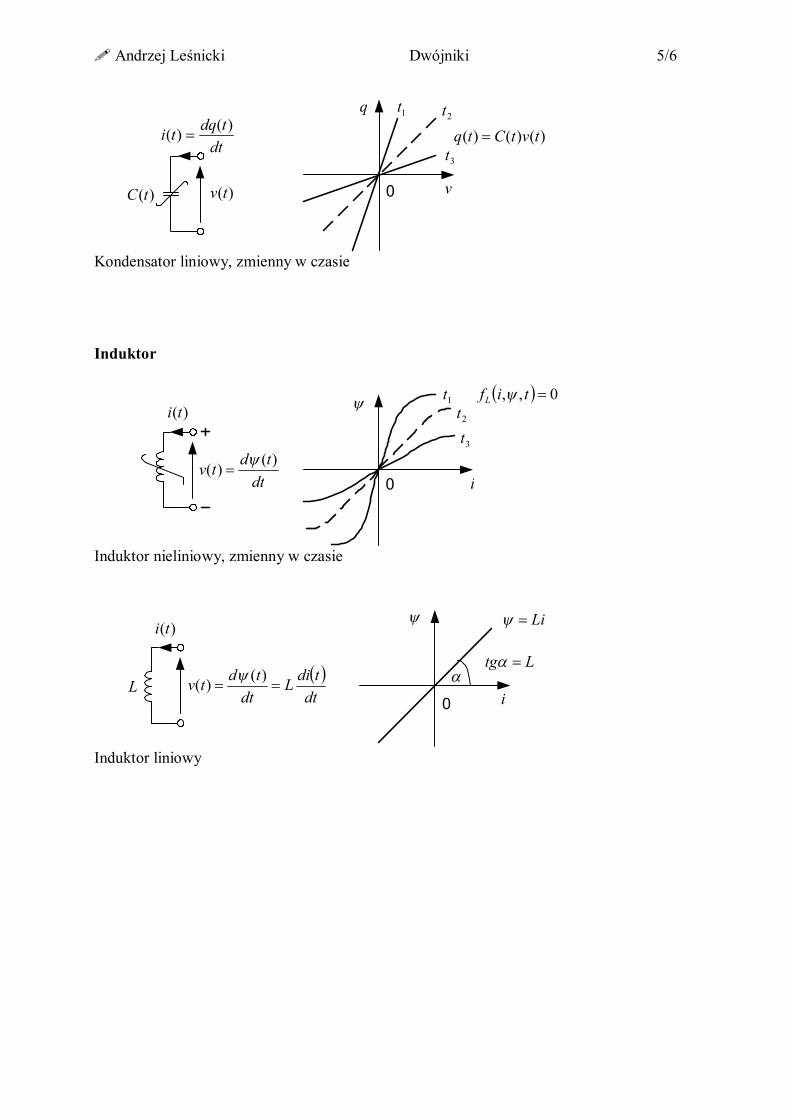
Andrzej Leśnicki Dwójniki 5/6
0
dttdqti )()(
)(tv)(tC
q
v
)()()( tvtCtq
1t 2t
3t
Kondensator liniowy, zmienny w czasie Induktor
0
3t)(ti
dttdtv )()(
i
2t1t 0,, tifL
Induktor nieliniowy, zmienny w czasie
0L
)(ti
dt
tdiLdt
tdtv )()(
i
Li
Ltg
Induktor liniowy
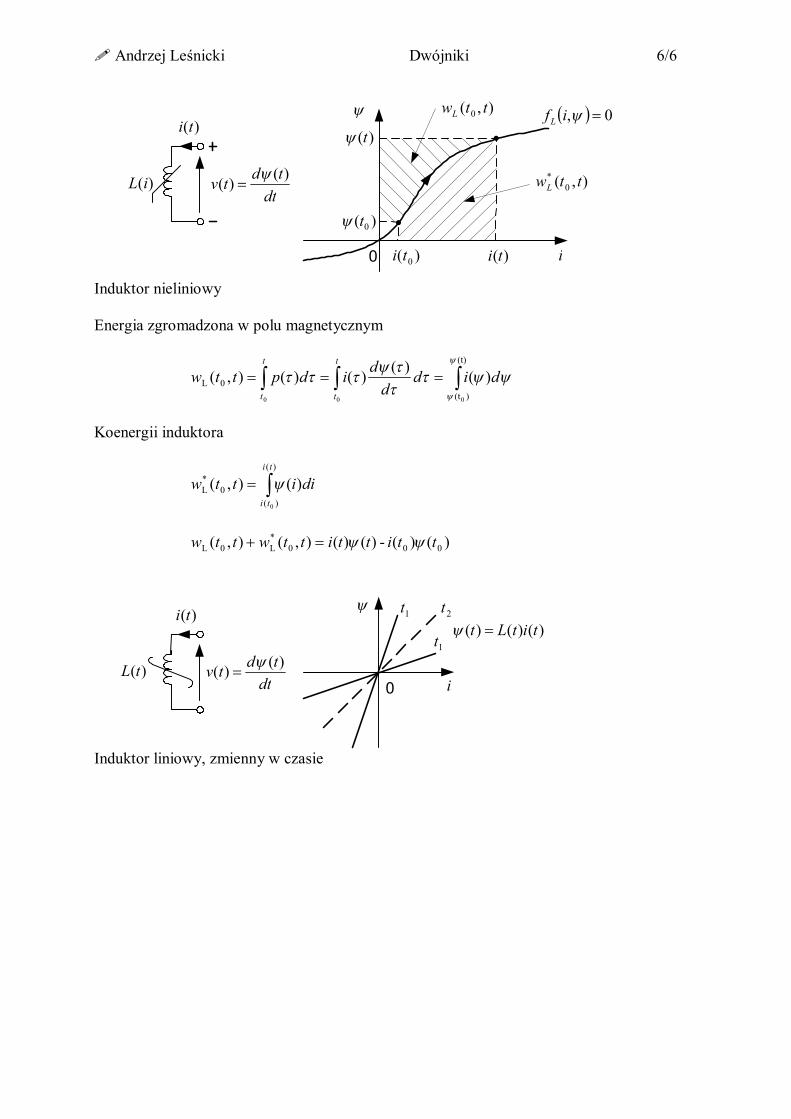
Andrzej Leśnicki Dwójniki 6/6
0
)(iLdt
tdtv )()(
)(ti
i
)(t
)( 0t
)( 0ti )(ti
),( 0 ttwL
),( 0* ttwL
0, ifL
Induktor nieliniowy Energia zgromadzona w polu magnetycznym
(t)
)(t0L
000
)()()()(),(
didd
didpttwt
t
t
t
Koenergii induktora
)(
)(0
*L
0
)(),(ti
ti
diittw
)()(-)()(),(),( 000
*L0L ttittittwttw
0
)(tL
)(ti
dttdtv )()(
)()()( titLt
i
1t 2t
1t
Induktor liniowy, zmienny w czasie
Andrzej Leśnicki Klasyfikacja wielowrotnikow 1/3
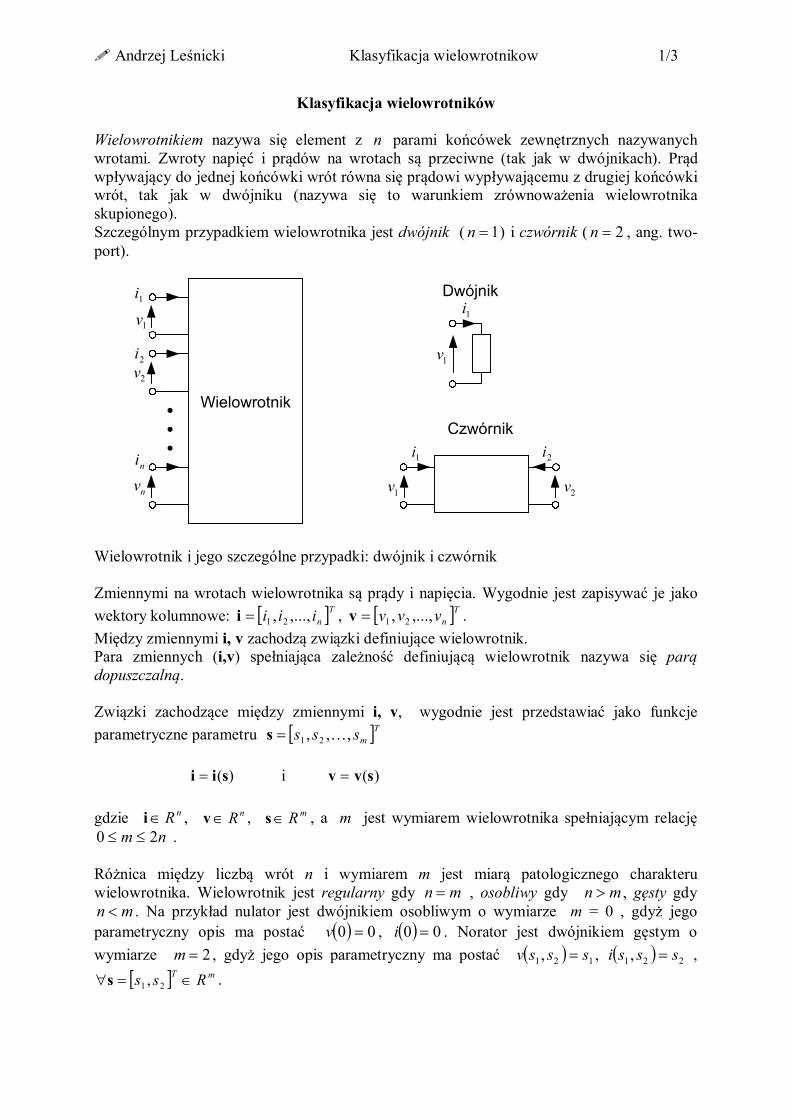
Klasyfikacja wielowrotników Wielowrotnikiem nazywa się element z n parami końcówek zewnętrznych nazywanych wrotami. Zwroty napięć i prądów na wrotach są przeciwne (tak jak w dwójnikach). Prąd wpływający do jednej końcówki wrót równa się prądowi wypływającemu z drugiej końcówki wrót, tak jak w dwójniku (nazywa się to warunkiem zrównoważenia wielowrotnika skupionego). Szczególnym przypadkiem wielowrotnika jest dwójnik ( 1n ) i czwórnik ( 2n , ang. two-port).
Wielowrotnik
Dwójnik
Czwórnik
1i
2i
ni
1v
2v
nv
1i
1i
1v
1v
2i
2v
Wielowrotnik i jego szczególne przypadki: dwójnik i czwórnik Zmiennymi na wrotach wielowrotnika są prądy i napięcia. Wygodnie jest zapisywać je jako wektory kolumnowe: Tniii ,...,, 21i , Tnvvv ,...,, 21v . Między zmiennymi i, v zachodzą związki definiujące wielowrotnik. Para zmiennych (i,v) spełniająca zależność definiującą wielowrotnik nazywa się parą dopuszczalną. Związki zachodzące między zmiennymi i, v, wygodnie jest przedstawiać jako funkcje parametryczne parametru Tmsss ,,, 21 s )(sii i )(svv gdzie nRi , nRv , mRs , a m jest wymiarem wielowrotnika spełniającym relację
nm 20 . Różnica między liczbą wrót n i wymiarem m jest miarą patologicznego charakteru wielowrotnika. Wielowrotnik jest regularny gdy mn , osobliwy gdy mn , gęsty gdy
mn . Na przykład nulator jest dwójnikiem osobliwym o wymiarze m = 0 , gdyż jego parametryczny opis ma postać 00 v , 00 i . Norator jest dwójnikiem gęstym o wymiarze 2m , gdyż jego opis parametryczny ma postać 121, sssv , 221 , sssi ,
mT Rss 21 ,s .

Andrzej Leśnicki Klasyfikacja wielowrotnikow 2/3
Definicja odwracalności. Wielowrotnik opisany równaniami parametrycznymi )(sii , )(svv jest odwracalny (inaczej wzajemny, spełniający zasadę wzajemności), gdy dla
każdego mRs zachodzi poniższa równość iloczynów skalarnych (znakami prim i bis oznaczono dwa różne stany wielowrotnika, w których zaszły przyrosty prądów i napięć)
svsisvsi dddd ,,
W przeciwnym razie wielowrotnik jest nieodwracalny. Twierdzenie . Wielowrotnik jest odwracalny wtedy i tylko wtedy, gdy jego macierz odwracalności
ss
sssR )()( vi T
jest symetryczna R(s) = [R(s)]T . Jeżeli wielowrotnik jest opisany zależnością )(vii lub )(ivv , to macierz odwracalności jest jakobianem, czyli odpowiednio macierzą konduktancji lub rezystancji dynamicznych wielowrotnika
vivJvR i d
d lub
iviJiR v d
d
Wśród wielowrotników nieodwracalnych są także dwójniki. Na przykład dla noratora opis parametryczny ma postać 121, sssv , 221 , sssi , skąd
01, 21 sssv ssv , 10, 21 sssi ssi i jego macierz odwracalności
0100
0110
sR
jest niesymetryczna, a więc norator jest dwójnikiem nieodwracalnym. Układ zbudowany z elementów odwracalnych jest układem odwracalnym.
Andrzej Leśnicki Klasyfikacja wielowrotnikow 3/3
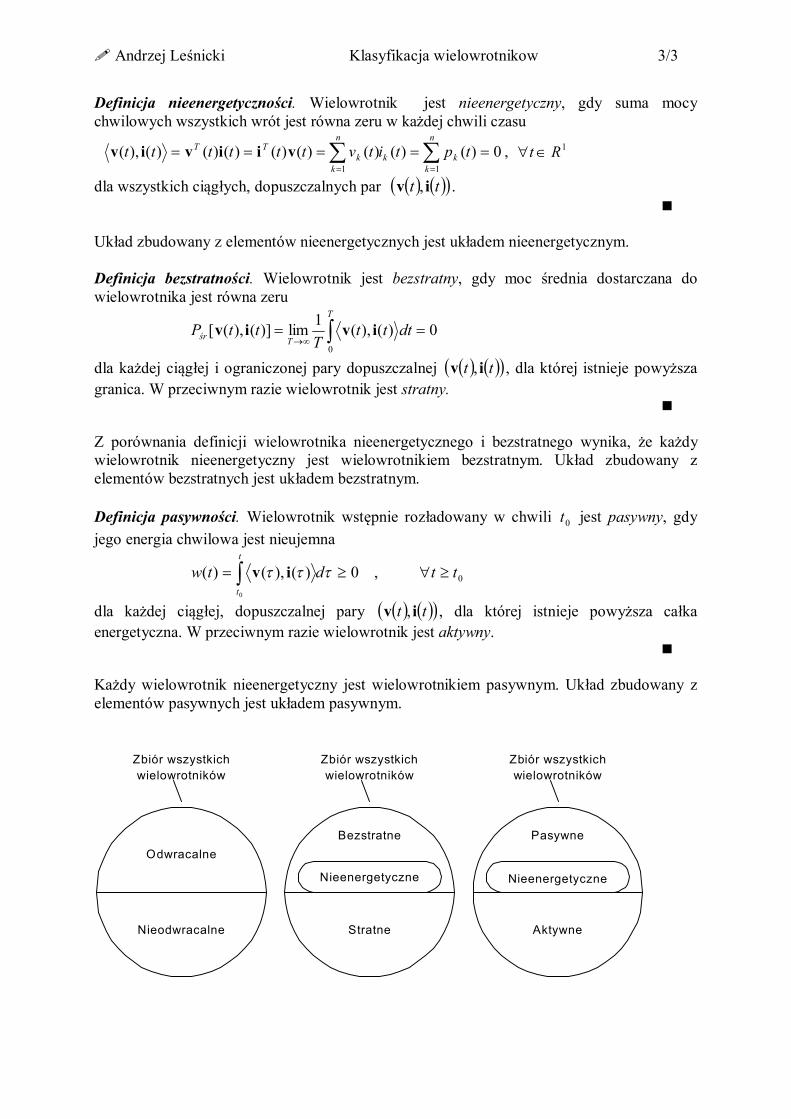
Definicja nieenergetyczności. Wielowrotnik jest nieenergetyczny, gdy suma mocy chwilowych wszystkich wrót jest równa zeru w każdej chwili czasu
0)()()()()()()()(),(11
n
kkk
n
kk
TT tptitvtttttt viiviv , 1Rt
dla wszystkich ciągłych, dopuszczalnych par tt iv , . Układ zbudowany z elementów nieenergetycznych jest układem nieenergetycznym. Definicja bezstratności. Wielowrotnik jest bezstratny, gdy moc średnia dostarczana do wielowrotnika jest równa zeru
T
Tśr dtttT
ttP0
0)(),(1lim)](),([ iviv
dla każdej ciągłej i ograniczonej pary dopuszczalnej tt iv , , dla której istnieje powyższa granica. W przeciwnym razie wielowrotnik jest stratny. Z porównania definicji wielowrotnika nieenergetycznego i bezstratnego wynika, że każdy wielowrotnik nieenergetyczny jest wielowrotnikiem bezstratnym. Układ zbudowany z elementów bezstratnych jest układem bezstratnym. Definicja pasywności. Wielowrotnik wstępnie rozładowany w chwili 0t jest pasywny, gdy jego energia chwilowa jest nieujemna
0)(),()(0
dtwt
t
iv , 0tt
dla każdej ciągłej, dopuszczalnej pary tt iv , , dla której istnieje powyższa całka energetyczna. W przeciwnym razie wielowrotnik jest aktywny. Każdy wielowrotnik nieenergetyczny jest wielowrotnikiem pasywnym. Układ zbudowany z elementów pasywnych jest układem pasywnym.
Zbiór wszystkichwielowrotników
Zbiór wszystkichwielowrotników
Zbiór wszystkichwielowrotników
Odwracalne
Nieodwracalne
Bezstratne
Stratne
Pasywne
Aktywne
Nieenergetyczne Nieenergetyczne
Andrzej Leśnicki źródła sterowane 1/1
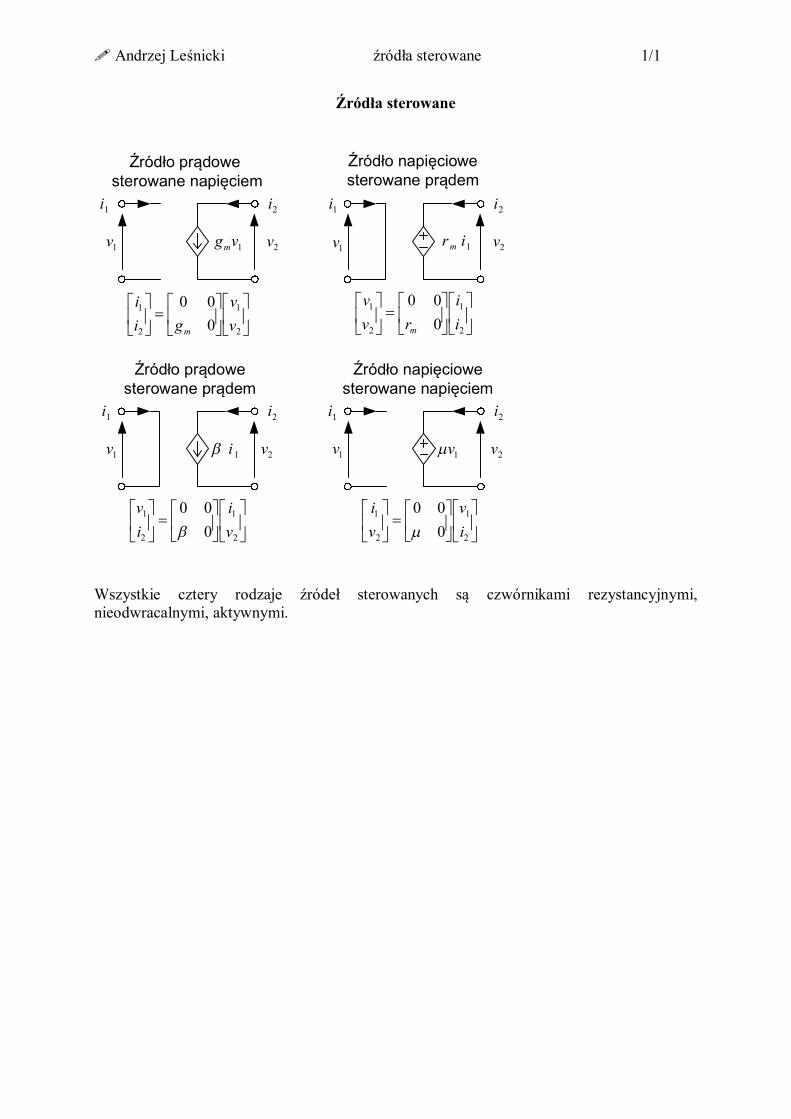
Źródła sterowane
Źródło prądowe sterowane napięciem
1vgm
Źródło napięciowesterowane prądem
Źródło prądowesterowane prądem
Źródło napięciowesterowane napięciem
1irm
1i 1v
1i
1i
1i
1i
1v
1v
1v
1v
2v
2v 2v
2v
2i
2i 2i
2i
2
1
2
1
000
vv
gii
m
2
1
2
1
000ii
rvv
m
2
1
2
1
000
vi
iv
2
1
2
1
000
iv
vi
Wszystkie cztery rodzaje źródeł sterowanych są czwórnikami rezystancyjnymi, nieodwracalnymi, aktywnymi.
Andrzej Leśnicki Żyrator 1/1
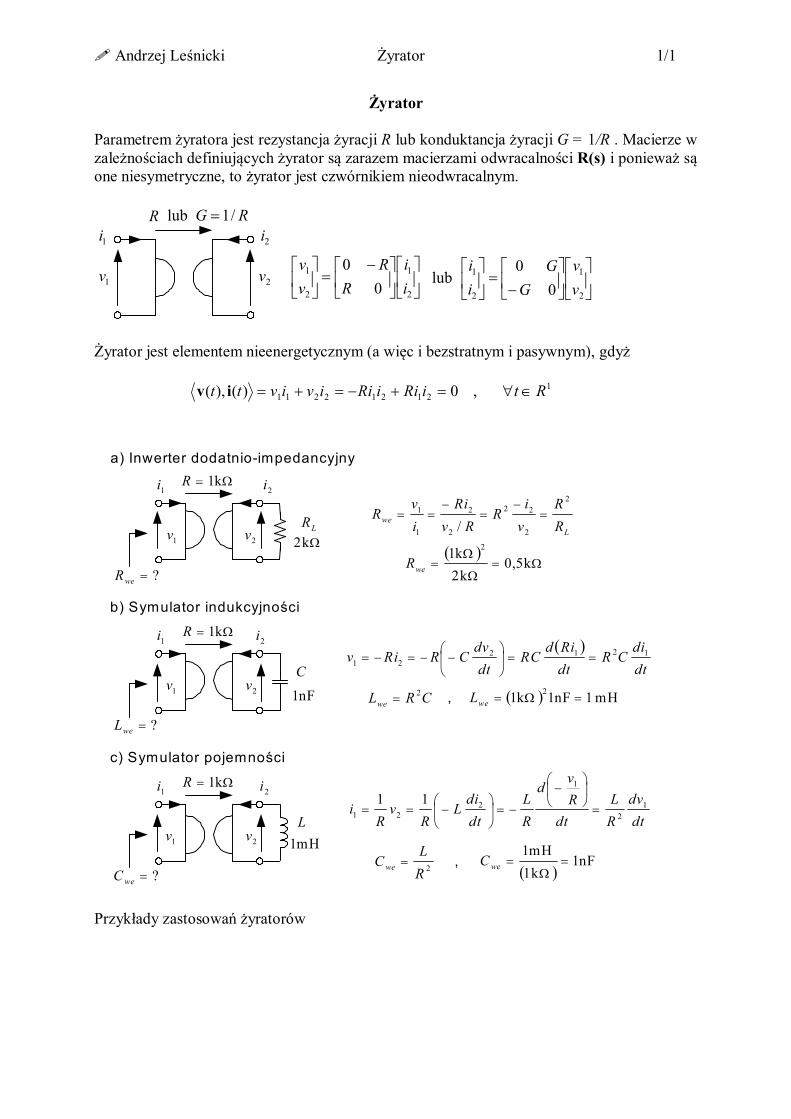
Żyrator Parametrem żyratora jest rezystancja żyracji R lub konduktancja żyracji G = 1/R . Macierze w zależnościach definiujących żyrator są zarazem macierzami odwracalności R(s) i ponieważ są one niesymetryczne, to żyrator jest czwórnikiem nieodwracalnym.
RG /1R lub1i 2i
1v 2v
2
1
2
1
00
ii
RR
vv
lub
2
1
2
1
00
vv
GG
ii
Żyrator jest elementem nieenergetycznym (a więc i bezstratnym i pasywnym), gdyż
0)(),( 21212211 iRiiRiivivtt iv , 1Rt
Lwe R
Rvi
RRv
Riiv
R2
2
22
2
2
1
1
/
k5,0
k2k1 2
weR
a) Inwerter dodatnio-impedancyjny
dtdi
CRdtRid
RCdt
dvCRRiv 1212
21
CRLwe2 mH 1nF1k1 2
weL
b) Symulator indukcyjności
dtdv
RL
dtRv
d
RL
dtdi
LR
vR
i 12
1
221
11
2RL
C we
nF11kmH1
weC
c) Symulator pojemności
k1R
LmH1
?weC
k1R1i 2i
1v 2v
?weL
?weR
k1R
C
nF1
LRk2
,
,
1v 2v
1i 2i
1i 2i
1v 2v
Przykłady zastosowań żyratorów
Andrzej Leśnicki Konwerter ujemno-impedancyjny 1/1
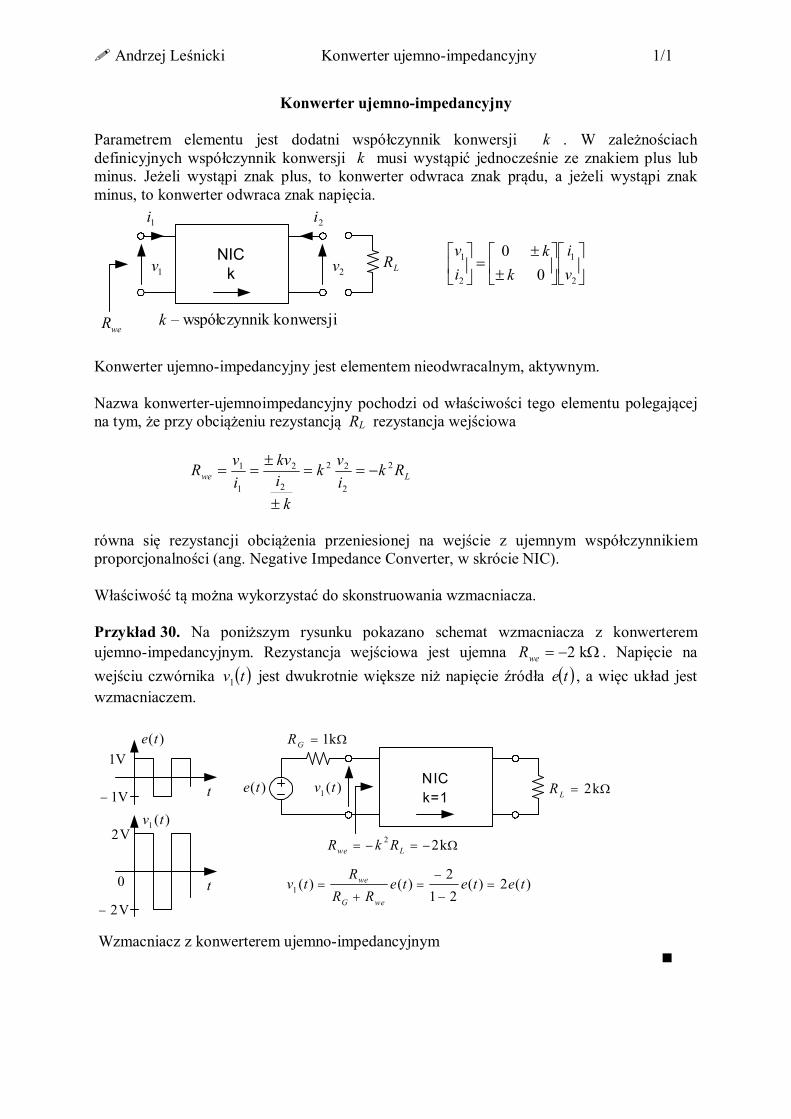
Konwerter ujemno-impedancyjny Parametrem elementu jest dodatni współczynnik konwersji k . W zależnościach definicyjnych współczynnik konwersji k musi wystąpić jednocześnie ze znakiem plus lub minus. Jeżeli wystąpi znak plus, to konwerter odwraca znak prądu, a jeżeli wystąpi znak minus, to konwerter odwraca znak napięcia.
NICk
weR
2
1
2
1
00
vi
kk
iv
LR1v 2v
1i 2i
k – współczynnik konwersji
Konwerter ujemno-impedancyjny jest elementem nieodwracalnym, aktywnym. Nazwa konwerter-ujemnoimpedancyjny pochodzi od właściwości tego elementu polegającej na tym, że przy obciążeniu rezystancją RL rezystancja wejściowa
Lwe Rkivk
kikv
ivR 2
2
22
2
2
1
1
równa się rezystancji obciążenia przeniesionej na wejście z ujemnym współczynnikiem proporcjonalności (ang. Negative Impedance Converter, w skrócie NIC). Właściwość tą można wykorzystać do skonstruowania wzmacniacza. Przykład 30. Na poniższym rysunku pokazano schemat wzmacniacza z konwerterem ujemno-impedancyjnym. Rezystancja wejściowa jest ujemna k2weR . Napięcie na wejściu czwórnika tv1 jest dwukrotnie większe niż napięcie źródła te , a więc układ jest wzmacniaczem.
NICk=1
)(te
k1GR
k2LR
k22Lwe RkR
)(2)(21
2)()(1 tetete
RRR
tvweG
we
V1
V1
V2
V2
0
t
t
)(te
)(1 tv
)(1 tv
Wzmacniacz z konwerterem ujemno-impedancyjnym
Andrzej Leśnicki Wzmacniacz operacyjny 1/2
Wzmacniacz operacyjny
WO 01 i 2i
1v 2v1v
2
1
2
1
000
iv
vi
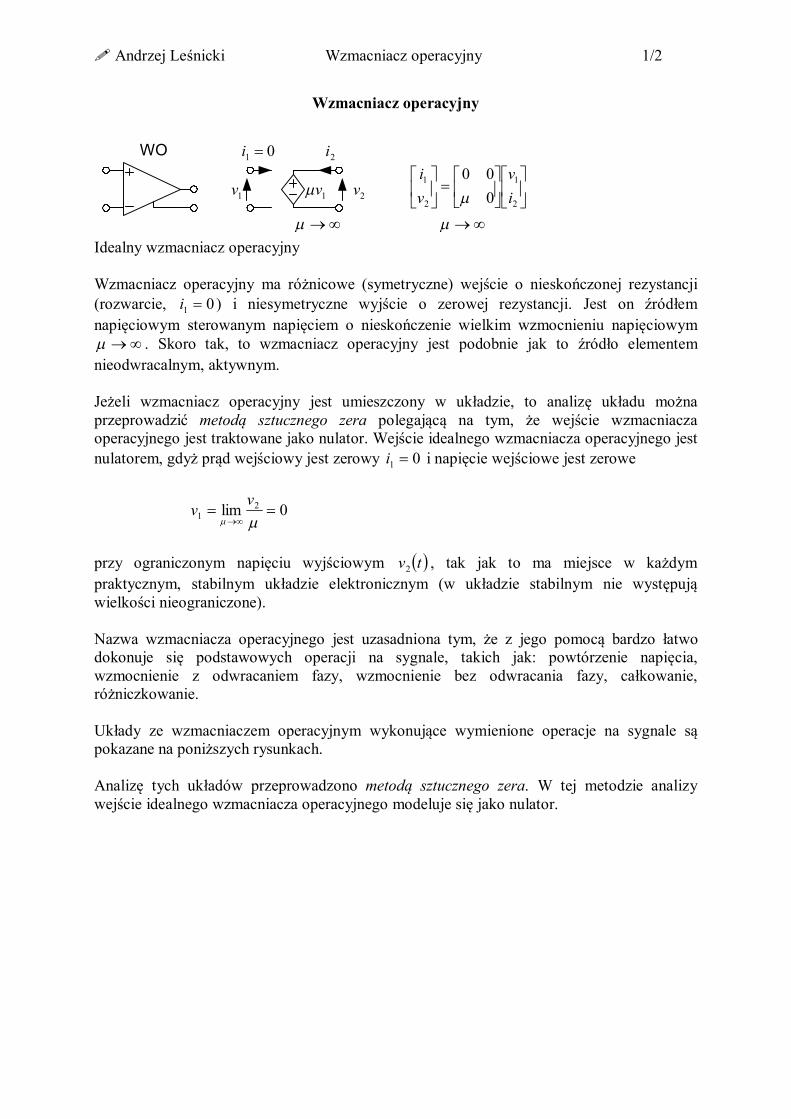
Idealny wzmacniacz operacyjny Wzmacniacz operacyjny ma różnicowe (symetryczne) wejście o nieskończonej rezystancji (rozwarcie, 01 i ) i niesymetryczne wyjście o zerowej rezystancji. Jest on źródłem napięciowym sterowanym napięciem o nieskończenie wielkim wzmocnieniu napięciowym
. Skoro tak, to wzmacniacz operacyjny jest podobnie jak to źródło elementem nieodwracalnym, aktywnym. Jeżeli wzmacniacz operacyjny jest umieszczony w układzie, to analizę układu można przeprowadzić metodą sztucznego zera polegającą na tym, że wejście wzmacniacza operacyjnego jest traktowane jako nulator. Wejście idealnego wzmacniacza operacyjnego jest nulatorem, gdyż prąd wejściowy jest zerowy 01 i i napięcie wejściowe jest zerowe
0lim 21
vv
przy ograniczonym napięciu wyjściowym tv2 , tak jak to ma miejsce w każdym praktycznym, stabilnym układzie elektronicznym (w układzie stabilnym nie występują wielkości nieograniczone). Nazwa wzmacniacza operacyjnego jest uzasadniona tym, że z jego pomocą bardzo łatwo dokonuje się podstawowych operacji na sygnale, takich jak: powtórzenie napięcia, wzmocnienie z odwracaniem fazy, wzmocnienie bez odwracania fazy, całkowanie, różniczkowanie. Układy ze wzmacniaczem operacyjnym wykonujące wymienione operacje na sygnale są pokazane na poniższych rysunkach. Analizę tych układów przeprowadzono metodą sztucznego zera. W tej metodzie analizy wejście idealnego wzmacniacza operacyjnego modeluje się jako nulator.
Andrzej Leśnicki Wzmacniacz operacyjny 2/2
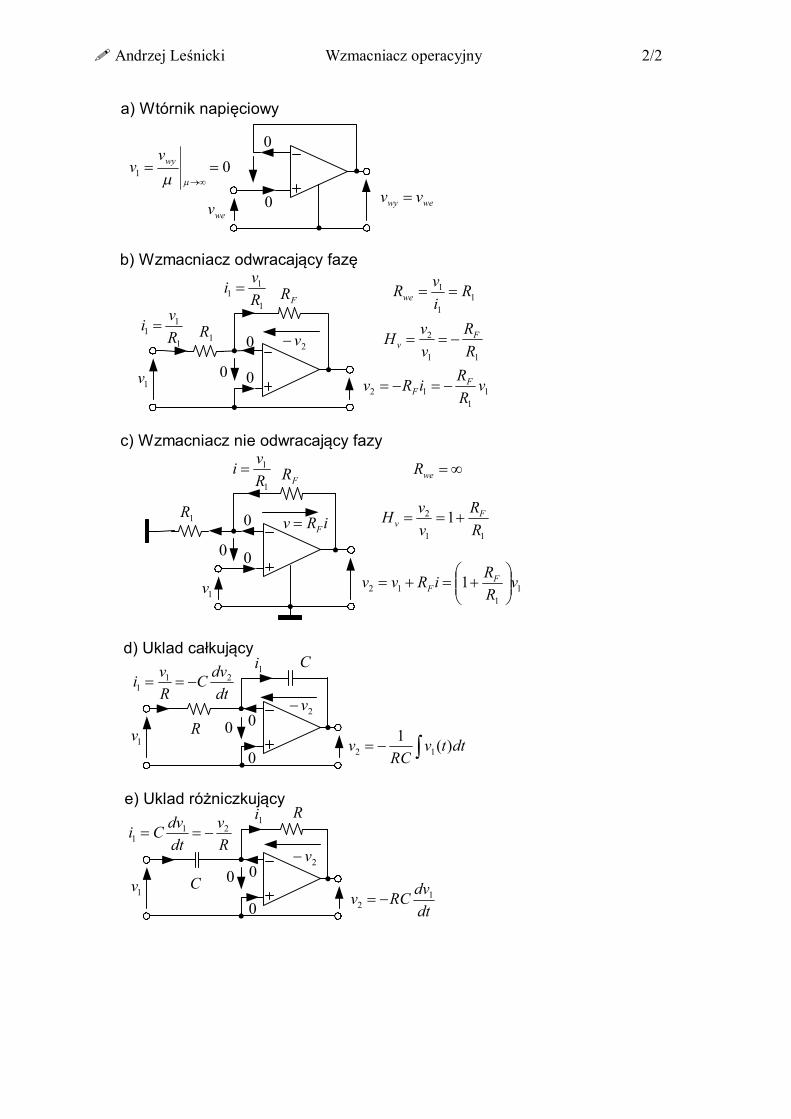
wev wewy vv
0
0
01
wyvv
a) Wtórnik napięciowy
b) Wzmacniacz odwracający fazę
iRv F
2v0
00
1R
FR
1v
1
11 R
vi 1
11 R
vi
11
12 vRRiRv F
F
11
1 RivRwe
11
2
RR
vvH F
v
c) Wzmacniacz nie odwracający fazy
0
00
1v
1R
FR1
1
Rvi
11
12 1 vRRiRvv F
F
weR
11
2 1RR
vvH F
v
d) Uklad całkujący
2vdt
dvCRvi 21
1
1v dttv
RCv )(1
12
1i C
0
0 0
e) Uklad różniczkujący
2vRv
dtdvCi 21
1 1i
R
R
C1v
dtdvRCv 1
2 0
0
0
Andrzej Leśnicki Transformator idealny 1/1
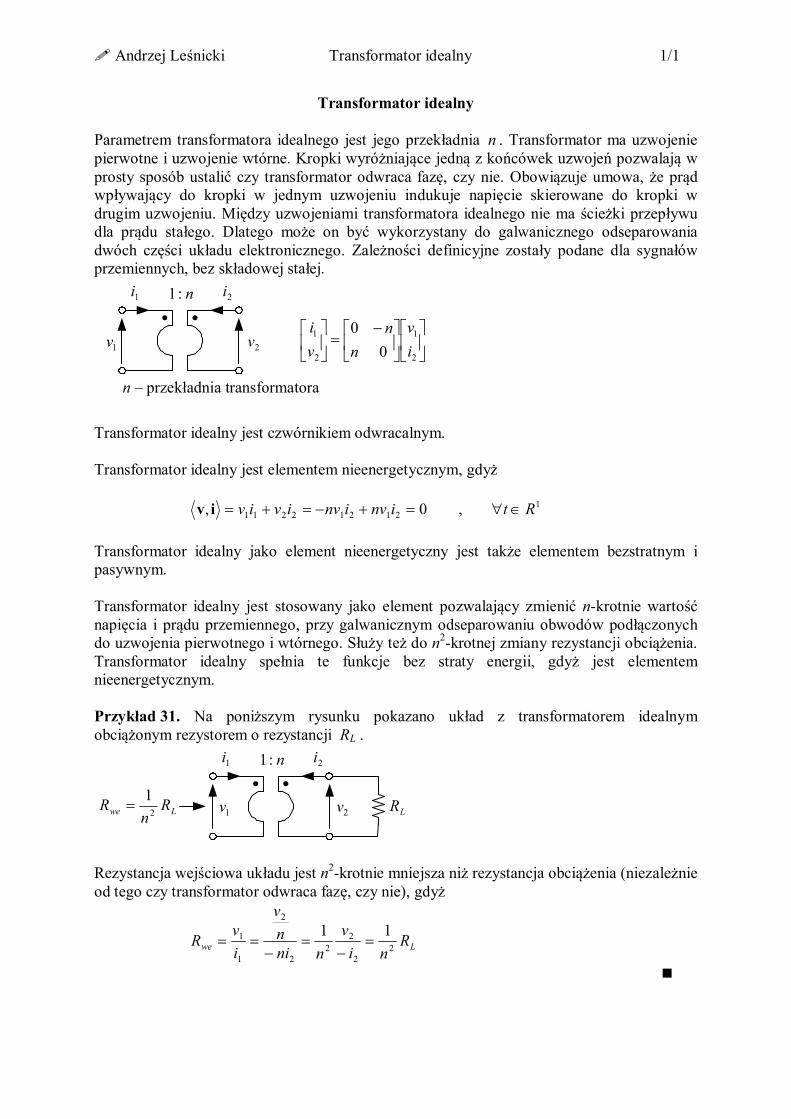
Transformator idealny Parametrem transformatora idealnego jest jego przekładnia n . Transformator ma uzwojenie pierwotne i uzwojenie wtórne. Kropki wyróżniające jedną z końcówek uzwojeń pozwalają w prosty sposób ustalić czy transformator odwraca fazę, czy nie. Obowiązuje umowa, że prąd wpływający do kropki w jednym uzwojeniu indukuje napięcie skierowane do kropki w drugim uzwojeniu. Między uzwojeniami transformatora idealnego nie ma ścieżki przepływu dla prądu stałego. Dlatego może on być wykorzystany do galwanicznego odseparowania dwóch części układu elektronicznego. Zależności definicyjne zostały podane dla sygnałów przemiennych, bez składowej stałej.
n:1
2
1
2
1
00
iv
nn
vi
1v 2v
1i 2i
n – przekładnia transformatora
Transformator idealny jest czwórnikiem odwracalnym. Transformator idealny jest elementem nieenergetycznym, gdyż 0, 21212211 invinviviviv , 1Rt Transformator idealny jako element nieenergetyczny jest także elementem bezstratnym i pasywnym. Transformator idealny jest stosowany jako element pozwalający zmienić n-krotnie wartość napięcia i prądu przemiennego, przy galwanicznym odseparowaniu obwodów podłączonych do uzwojenia pierwotnego i wtórnego. Służy też do n2-krotnej zmiany rezystancji obciążenia. Transformator idealny spełnia te funkcje bez straty energii, gdyż jest elementem nieenergetycznym. Przykład 31. Na poniższym rysunku pokazano układ z transformatorem idealnym obciążonym rezystorem o rezystancji RL .
n:1
1v 2v
1i 2i
LRLwe Rn
R 2
1
Rezystancja wejściowa układu jest n2-krotnie mniejsza niż rezystancja obciążenia (niezależnie od tego czy transformator odwraca fazę, czy nie), gdyż
Lwe Rni
vnni
nv
ivR 2
2
22
2
2
1
1 11
Andrzej Leśnicki Transformator rzeczywisty 1/3
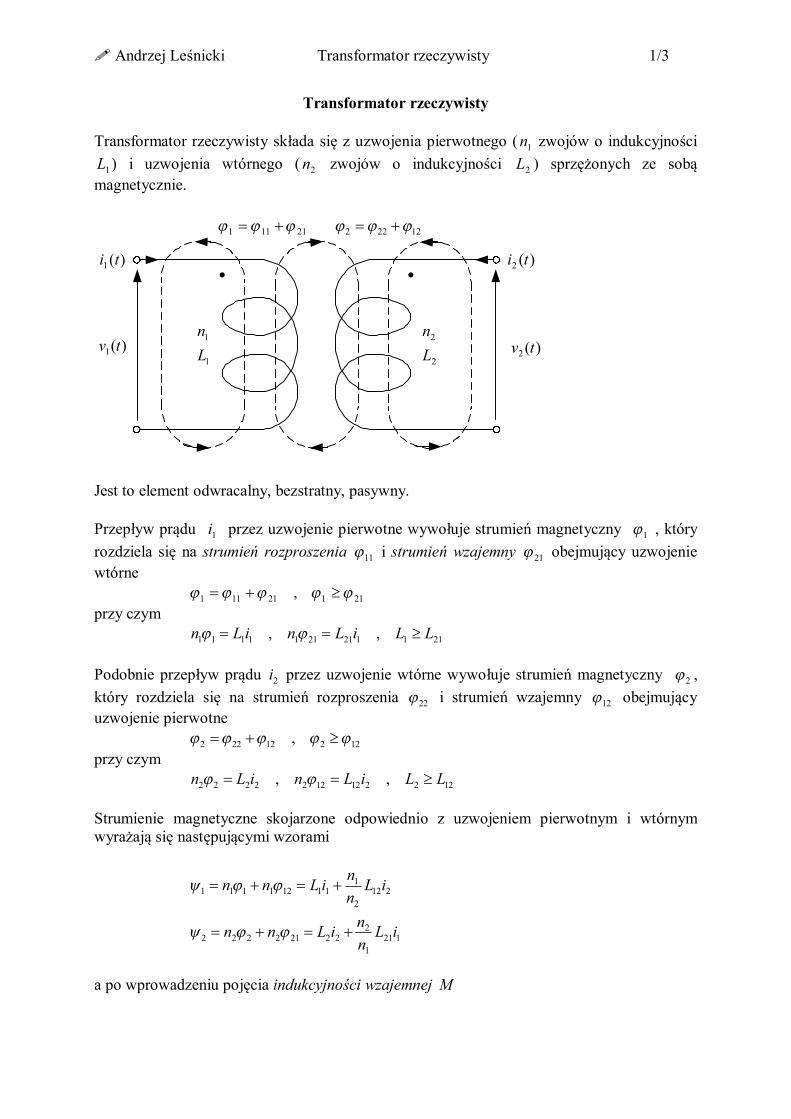
Transformator rzeczywisty Transformator rzeczywisty składa się z uzwojenia pierwotnego ( 1n zwojów o indukcyjności
1L ) i uzwojenia wtórnego ( 2n zwojów o indukcyjności 2L ) sprzężonych ze sobą magnetycznie.
1
1
Ln
2
2
Ln
)(2 ti
)(1 tv )(2 tv
)(1 ti
21111 12222
Jest to element odwracalny, bezstratny, pasywny. Przepływ prądu 1i przez uzwojenie pierwotne wywołuje strumień magnetyczny 1 , który rozdziela się na strumień rozproszenia 11 i strumień wzajemny 21 obejmujący uzwojenie wtórne 21121111 , przy czym 2111212111111 ,, LLiLniLn Podobnie przepływ prądu 2i przez uzwojenie wtórne wywołuje strumień magnetyczny 2 , który rozdziela się na strumień rozproszenia 22 i strumień wzajemny 12 obejmujący uzwojenie pierwotne 12212222 , przy czym 1222121222222 ,, LLiLniLn Strumienie magnetyczne skojarzone odpowiednio z uzwojeniem pierwotnym i wtórnym wyrażają się następującymi wzorami
121
1
222212222
2122
111121111
iLnniLnn
iLnniLnn
a po wprowadzeniu pojęcia indukcyjności wzajemnej M
Andrzej Leśnicki Transformator rzeczywisty 2/3
211
212
2
1 LnnL
nnM
mamy
2212
2111
iLMiMiiL
Wartość indukcyjności wzajemnej spełnia następującą relację 212112
2 LLLLM Zamiast operować indukcyjnością wzajemną M , czasami jest wygodniej operować bezwymiarowym współczynnikiem sprzężenia k
21LL
Mk
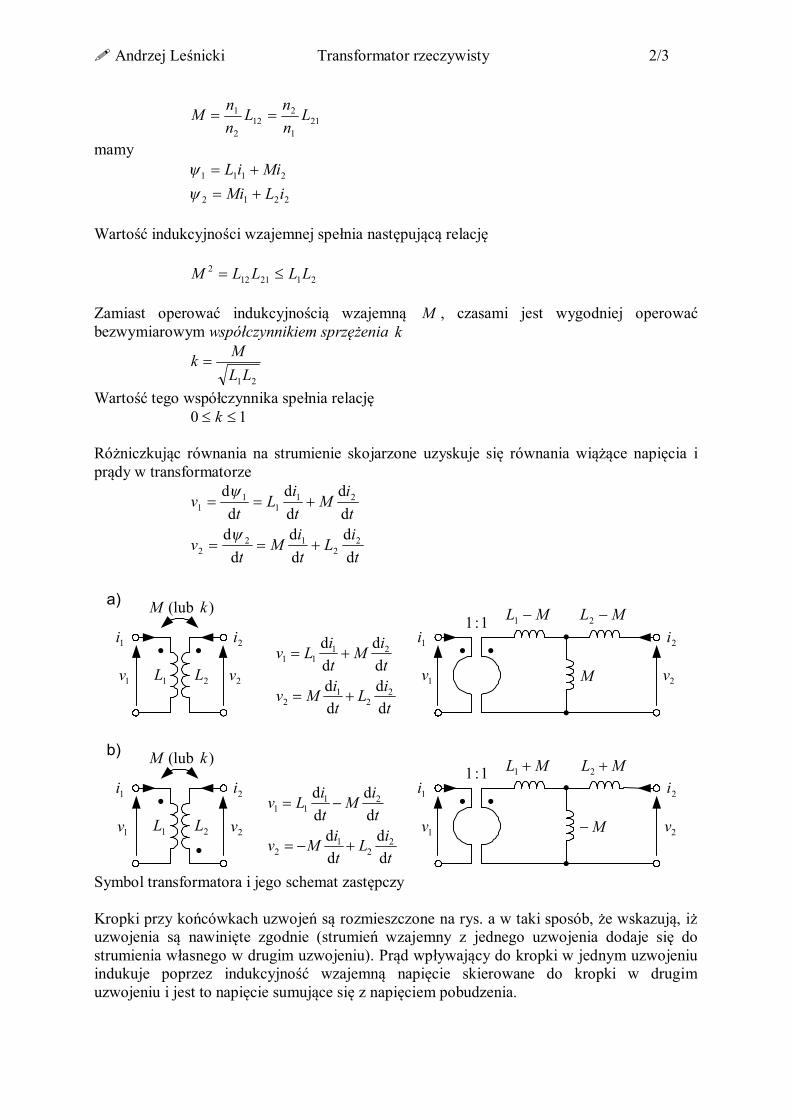
Wartość tego współczynnika spełnia relację 10 k Różniczkując równania na strumienie skojarzone uzyskuje się równania wiążące napięcia i prądy w transformatorze
tiL
tiM
tv
tiM
tiL
tv
dd
dd
dd
dd
dd
dd
22
122
211
11
tiL
tiMv
tiM
tiLv
dd
dd
dd
dd
22
12
2111
2v1v 2v1v
1i 1i2i 2i1:1
M
ML 1 ML 2
1L 2L
)(lub kM
tiL
tiMv
tiM
tiLv
dd
dd
dd
dd
22
12
2111
2v1v 2v1v
1i 1i2i 2i1:1
M
ML 1 ML 2
1L 2L
)(lub kM
a)
b)
Symbol transformatora i jego schemat zastępczy Kropki przy końcówkach uzwojeń są rozmieszczone na rys. a w taki sposób, że wskazują, iż uzwojenia są nawinięte zgodnie (strumień wzajemny z jednego uzwojenia dodaje się do strumienia własnego w drugim uzwojeniu). Prąd wpływający do kropki w jednym uzwojeniu indukuje poprzez indukcyjność wzajemną napięcie skierowane do kropki w drugim uzwojeniu i jest to napięcie sumujące się z napięciem pobudzenia.
Andrzej Leśnicki Transformator rzeczywisty 3/3
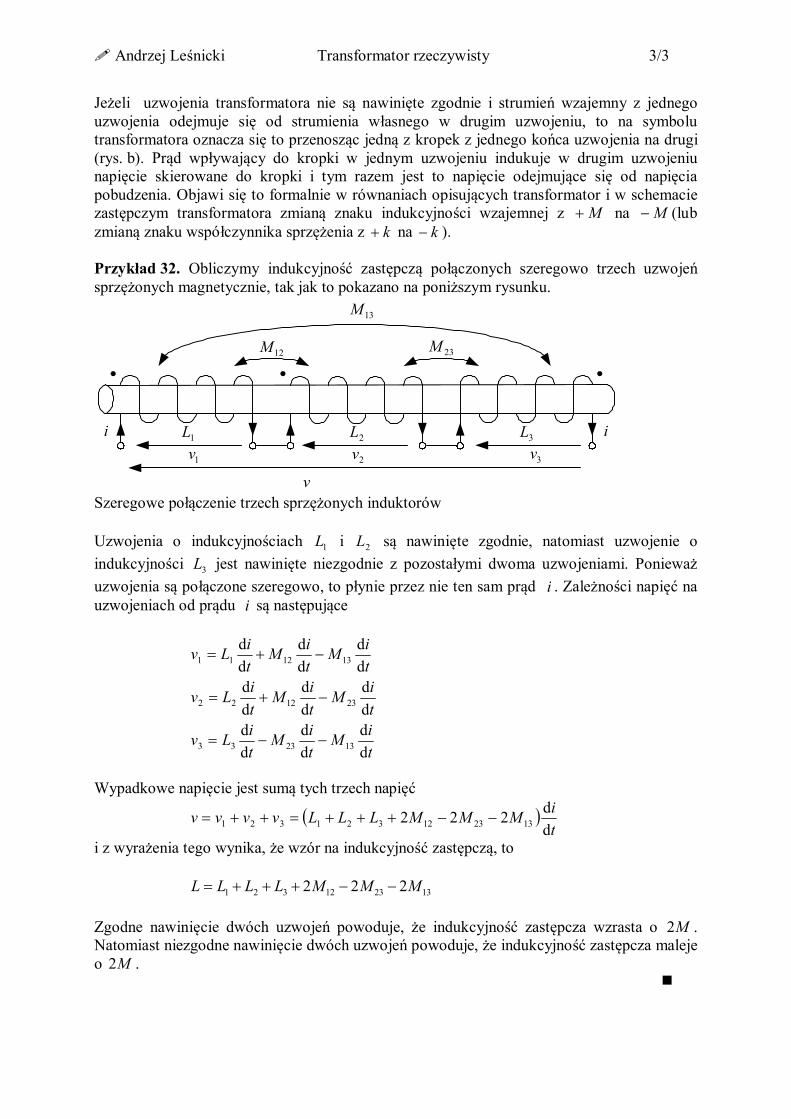
Jeżeli uzwojenia transformatora nie są nawinięte zgodnie i strumień wzajemny z jednego uzwojenia odejmuje się od strumienia własnego w drugim uzwojeniu, to na symbolu transformatora oznacza się to przenosząc jedną z kropek z jednego końca uzwojenia na drugi (rys. b). Prąd wpływający do kropki w jednym uzwojeniu indukuje w drugim uzwojeniu napięcie skierowane do kropki i tym razem jest to napięcie odejmujące się od napięcia pobudzenia. Objawi się to formalnie w równaniach opisujących transformator i w schemacie zastępczym transformatora zmianą znaku indukcyjności wzajemnej z M na M (lub zmianą znaku współczynnika sprzężenia z k na k ). Przykład 32. Obliczymy indukcyjność zastępczą połączonych szeregowo trzech uzwojeń sprzężonych magnetycznie, tak jak to pokazano na poniższym rysunku.
1L 2L 3L
12M 23M
13M
1v 2v 3v
v
i i
Szeregowe połączenie trzech sprzężonych induktorów Uzwojenia o indukcyjnościach 1L i 2L są nawinięte zgodnie, natomiast uzwojenie o indukcyjności 3L jest nawinięte niezgodnie z pozostałymi dwoma uzwojeniami. Ponieważ uzwojenia są połączone szeregowo, to płynie przez nie ten sam prąd i . Zależności napięć na uzwojeniach od prądu i są następujące
tiM
tiM
tiLv
tiM
tiM
tiLv
tiM
tiM
tiLv
dd
dd
dd
dd
dd
dd
dd
dd
dd
132333
231222
131211
Wypadkowe napięcie jest sumą tych trzech napięć
tiMMMLLLvvvv
dd222 132312321321
i z wyrażenia tego wynika, że wzór na indukcyjność zastępczą, to 132312321 222 MMMLLLL Zgodne nawinięcie dwóch uzwojeń powoduje, że indukcyjność zastępcza wzrasta o M2 . Natomiast niezgodne nawinięcie dwóch uzwojeń powoduje, że indukcyjność zastępcza maleje o M2 .

Andrzej Leśnicki Klasyfikacja sygnałów 1/2
Klasyfikacja sygnałów Najogólniej sygnały dzielą się na deterministyczne i losowe. Sygnał tx jest sygnałem deterministycznym, gdy w każdej chwili czasu jest znana, zdeterminowana wartość sygnału. Sygnał tx jest sygnałem losowym, gdy w danej chwili czasu można podać tylko prawdopodobieństwo z jakim sygnał przyjmie wartość z pewnego przedziału (lub zbioru) wartości. W dalszym ciągu będziemy zajmowali się wyłącznie sygnałami deterministycznymi. Moc chwilowa wydzielona na rezystorze o rezystancji R jest proporcjonalna do kwadratu modułu napięcia lub prądu
22
tiRRtv
titvtp
W nawiązaniu do tego wzoru, dla sygnału tx wielkość 2tx nazywa się mocą chwilową, gdyż zakłada się, że jest to moc sygnału napięciowego lub prądowego na rezystancji jednostkowej 1R . Moc średnia sygnału jest uśrednioną wartością mocy chwilowej
T
TTx dttx
TxP 22
21lim
Sygnał nazywa się sygnałem mocy, gdy ma różną od zera i ograniczoną moc średnią
xP0 . Sygnał mocy ma wartość skuteczną równą pierwiastkowi kwadratowemu z mocy
średniej xsk PX . Energia sygnału jest zdefiniowana jako całka mocy chwilowej sygnału. Całkowita energia sygnału jest obliczana w całym przedziale istnienia sygnału
dttxdttpEx2
Sygnał nazywa się sygnałem energii, gdy ma różną od zera i ograniczoną energię xE0 . Każdy sygnał jest albo sygnałem mocy, albo sygnałem energii, albo nie jest ani sygnałem mocy ani sygnałem energii.

Andrzej Leśnicki Klasyfikacja sygnałów 2/2
Sygnał tx ma wartość średnią daną wzorem
T
TT
dttxT
xX21lim0 ,
2
2120
1 t
t
dttxtt
xX
i wariancję
T
TTx dtxtx
T22
21lim ,
2
1
2
12
2 1 t
tx dtxtx
tt
przy czym powyższe wzory podano odpowiednio dla sygnału nieskończonego i sygnału skończonego w przedziale czasu 21 ttt . Każdy sygnał (także sygnał zespolony tjxtxtx IR ) można przedstawić jako sumę części o symetrii parzystej i części o symetrii nieparzystej txtxtx oe gdzie
2
txtxtxe
2
txtxtxo

Andrzej Leśnicki Sygnały okresowe i prawie okresowe 1/4
Sygnały okresowe i prawie okresowe Sygnał okresowy jest funkcją okresową, czyli funkcją spełniającą następujący warunek 0Ttxtx gdzie najmniejsza liczba 00 T spełniająca powyższe równanie nazywa się okresem (podstawowym) sygnału.
Z okresem 0T funkcji okresowej są związane częstotliwość podstawowa 0
01
Tf i pulsacja
podstawowa 0
0022T
f .
Każdy sygnał okresowy jest sygnałem nieskończonym.
0T 0T 0T
t0
0X 0Ttxtx
ppX
Sygnał okresowy ma wartość średnią określoną wzorem
dttxT
dttxT
xXT
Tt
t
0
00
0 000
11
W powyższej całce zapis 0T
oznacza, że dla sygnału okresowego wynik całkowania w
granicach od 0t do 00 Tt nie zależy od początkowej chwili całkowania 0t . Ważne jest jedynie, aby całkować w przedziale czasu równym okresowi 0T . W praktyce sygnały okresowe są całkowalne z kwadratem w okresie 0T i są sygnałami mocy o mocy
0
2
0
2 121lim
T
T
TTx dttx
Tdttx
TP
i wartości skutecznej
0
2
0
1
Txsk dttx
TPX
Wartość skuteczna jest interpretowana jako wartość równoważnego sygnału stałego, który wydzieli na rezystorze taką samą moc zamienianą na ciepło jak sygnał okresowy. Różnica między wartością maksymalną i minimalną sygnału w jednym okresie nazywa się wartością międzyszczytową ppX (ang. peak-peak value).
Andrzej Leśnicki Sygnały okresowe i prawie okresowe 2/4
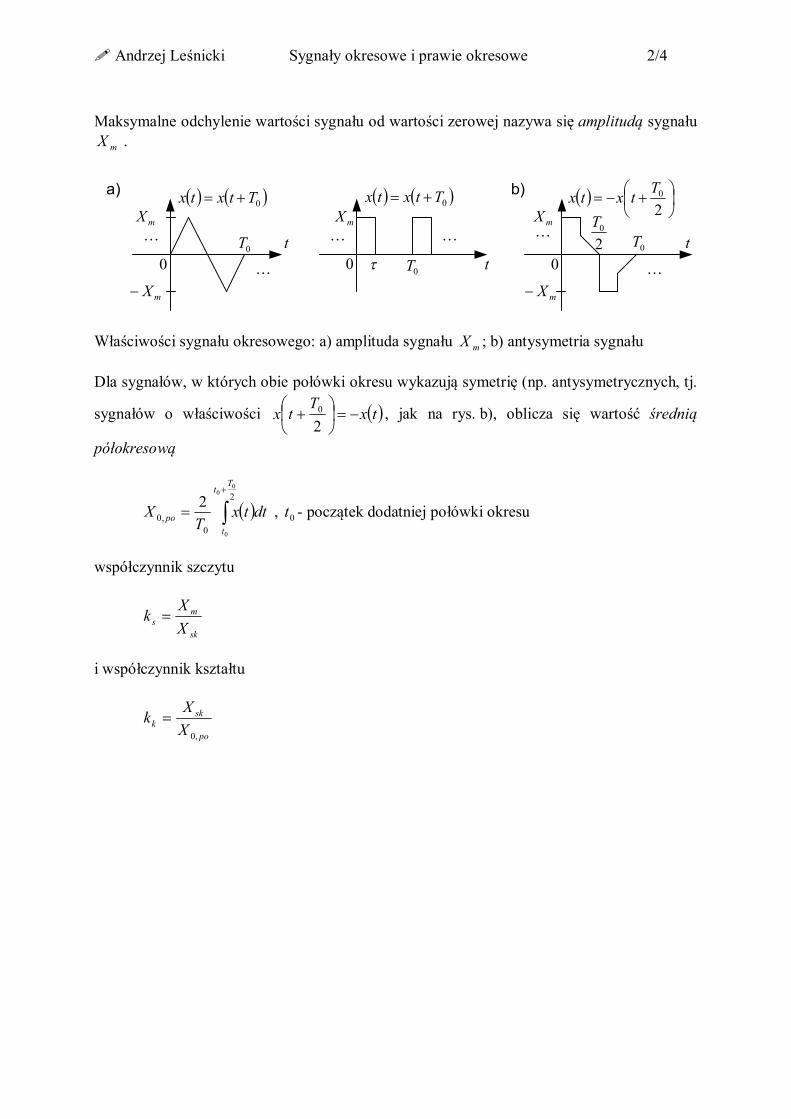
Maksymalne odchylenie wartości sygnału od wartości zerowej nazywa się amplitudą sygnału
mX .
0T t0
mX
mX
0Ttxtx a)
mX
0 t0T
0Ttxtx b)
20Ttxtx
t0T0
20T
mX
mX
Właściwości sygnału okresowego: a) amplituda sygnału mX ; b) antysymetria sygnału Dla sygnałów, w których obie połówki okresu wykazują symetrię (np. antysymetrycznych, tj.
sygnałów o właściwości txT
tx
20 , jak na rys. b), oblicza się wartość średnią
półokresową
2
0,0
00
0
2T
t
tpo dttx
TX , 0t - początek dodatniej połówki okresu
współczynnik szczytu
sk
ms X
Xk
i współczynnik kształtu
po
skk X
Xk,0

Andrzej Leśnicki Sygnały okresowe i prawie okresowe 3/4
Przykład 33. Wyznaczymy parametry danego sygnału okresowego.
tx
0 1 2 34 5 6
1
2
2
1
t
7 8 910 11 12
Sygnał ma okres 60 T , częstotliwość podstawową 610 f i pulsację podstawową
30 . Jest to sygnał antysymetryczny i ma wartość średnią równą zeru 00 X , wartość średnią półokresową 3,0 poX , wartość międzyszczytową 4ppX i amplitudę 2mX . Moc sygnału ma wartość
35
610410410
611
0
2
0
T
x dttxT
P
skąd wartość skuteczna sygnału 35
xsk PX . Sygnał ma współczynnik szczytu o
wartości 532 skms XXk i współczynnik kształtu
35
31
,0 poskk XXk .
Sygnały okresowe mają widmo dyskretne, w którym stosunki częstotliwości (pulsacji) prążków są liczbami wymiernymi (teoria rozwijania sygnału okresowego w szereg Fouriera, pozwalająca określić wartości prążków widma, będzie omawiana później).
0f 03 f02 f 04 f 05 f 06 f
0 02 03 060504
0 f
lub
wymiernaliczbaj
i
ffprążki widma
Przykład widma sygnału okresowego Na przykład sygnał tttx 1,2cos23,3cos5 jest sygnałem okresowym, gdyż przyjmując
3,30 m i 1,20 n mamy 711nm i pulsacja podstawowa 3,00 .
Andrzej Leśnicki Sygnały okresowe i prawie okresowe 4/4
Sygnał prawie okresowy może być zdefiniowany w dziedzinie czasu lub w dziedzinie częstotliwości. Definicja sformułowana w dziedzinie czasu mówi, ze sygnał nieskończony tx jest sygnałem prawie okresowym , gdy można go aproksymować z dowolną
dokładnością wielomianami trygonometrycznymi
N
Nk
tjkN
kewtw , czyli dla dowolnie
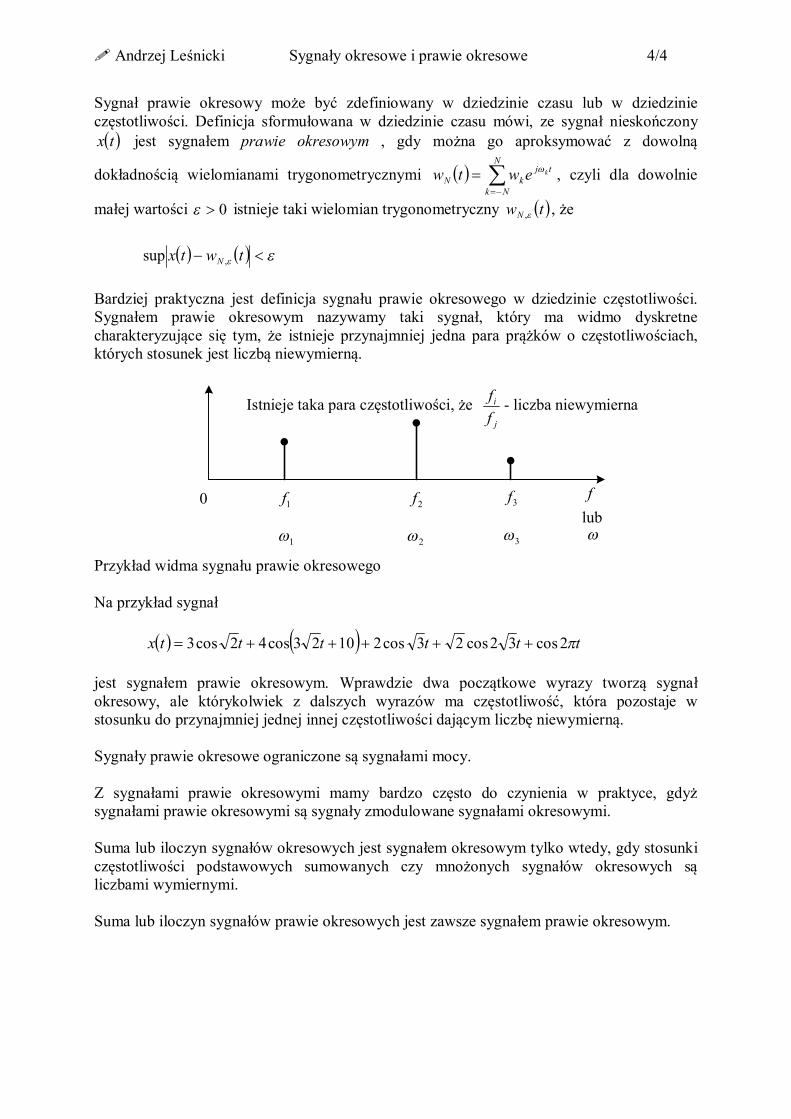
małej wartości 0 istnieje taki wielomian trygonometryczny twN , , że twtx N ,sup Bardziej praktyczna jest definicja sygnału prawie okresowego w dziedzinie częstotliwości. Sygnałem prawie okresowym nazywamy taki sygnał, który ma widmo dyskretne charakteryzujące się tym, że istnieje przynajmniej jedna para prążków o częstotliwościach, których stosunek jest liczbą niewymierną.
1 2 3
2f1f 3f f
lub
0
Istnieje taka para częstotliwości, że j
i
ff - liczba niewymierna
Przykład widma sygnału prawie okresowego Na przykład sygnał
ttttttx 2cos32cos23cos21023cos42cos3
jest sygnałem prawie okresowym. Wprawdzie dwa początkowe wyrazy tworzą sygnał okresowy, ale którykolwiek z dalszych wyrazów ma częstotliwość, która pozostaje w stosunku do przynajmniej jednej innej częstotliwości dającym liczbę niewymierną. Sygnały prawie okresowe ograniczone są sygnałami mocy. Z sygnałami prawie okresowymi mamy bardzo często do czynienia w praktyce, gdyż sygnałami prawie okresowymi są sygnały zmodulowane sygnałami okresowymi. Suma lub iloczyn sygnałów okresowych jest sygnałem okresowym tylko wtedy, gdy stosunki częstotliwości podstawowych sumowanych czy mnożonych sygnałów okresowych są liczbami wymiernymi. Suma lub iloczyn sygnałów prawie okresowych jest zawsze sygnałem prawie okresowym.
Andrzej Leśnicki Sygnał stały 1/1
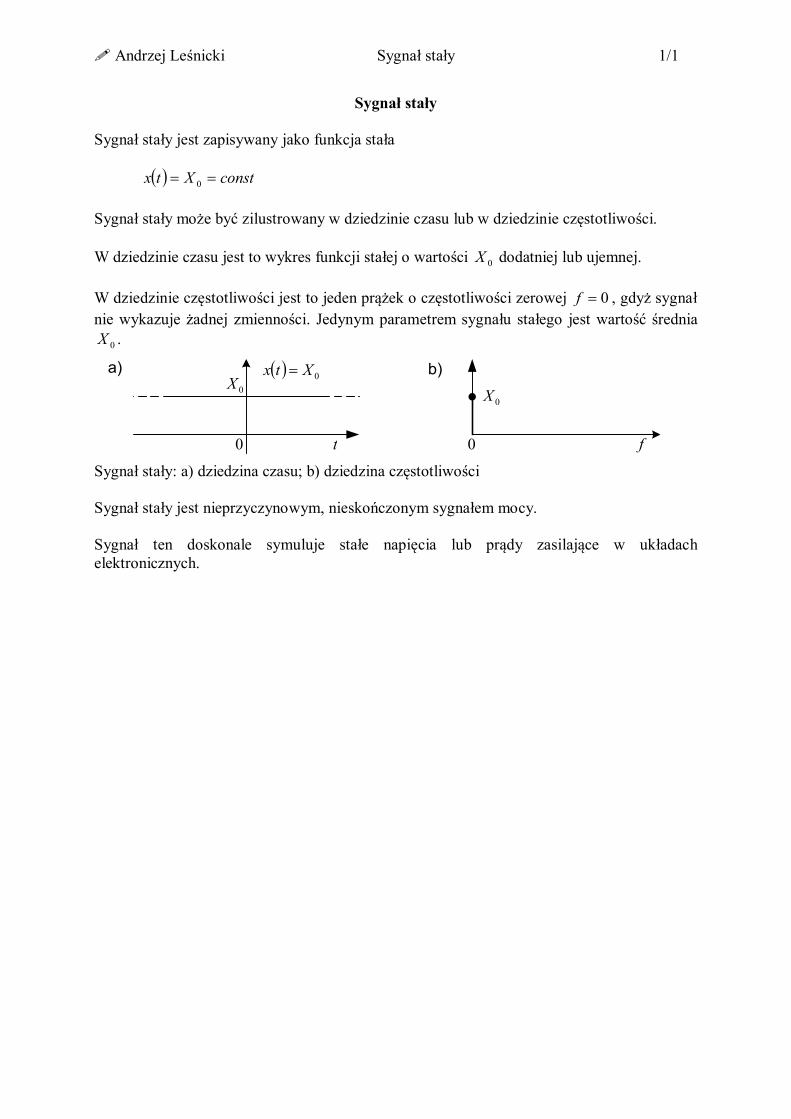
Sygnał stały Sygnał stały jest zapisywany jako funkcja stała constXtx 0 Sygnał stały może być zilustrowany w dziedzinie czasu lub w dziedzinie częstotliwości. W dziedzinie czasu jest to wykres funkcji stałej o wartości 0X dodatniej lub ujemnej. W dziedzinie częstotliwości jest to jeden prążek o częstotliwości zerowej 0f , gdyż sygnał nie wykazuje żadnej zmienności. Jedynym parametrem sygnału stałego jest wartość średnia
0X .
0Xtx
0X
t f0 0
0Xa) b)
Sygnał stały: a) dziedzina czasu; b) dziedzina częstotliwości Sygnał stały jest nieprzyczynowym, nieskończonym sygnałem mocy. Sygnał ten doskonale symuluje stałe napięcia lub prądy zasilające w układach elektronicznych.
Andrzej Leśnicki Sygnał sinusoidalny 1/3
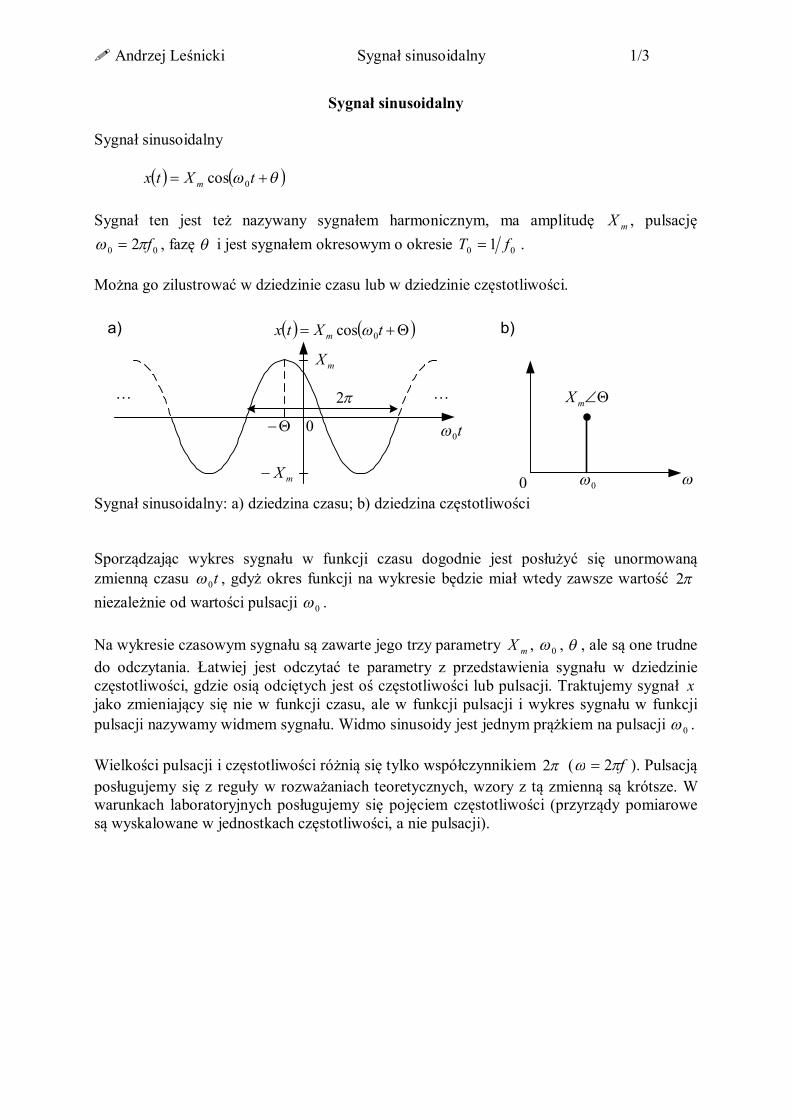
Sygnał sinusoidalny Sygnał sinusoidalny tXtx m 0cos Sygnał ten jest też nazywany sygnałem harmonicznym, ma amplitudę mX , pulsację
00 2 f , fazę i jest sygnałem okresowym o okresie 00 1 fT . Można go zilustrować w dziedzinie czasu lub w dziedzinie częstotliwości.
tXtx m 0cos
0 0
0 t0
mX
mX
2 mX
a) b)
Sygnał sinusoidalny: a) dziedzina czasu; b) dziedzina częstotliwości Sporządzając wykres sygnału w funkcji czasu dogodnie jest posłużyć się unormowaną zmienną czasu t0 , gdyż okres funkcji na wykresie będzie miał wtedy zawsze wartość 2 niezależnie od wartości pulsacji 0 . Na wykresie czasowym sygnału są zawarte jego trzy parametry mX , 0 , , ale są one trudne do odczytania. Łatwiej jest odczytać te parametry z przedstawienia sygnału w dziedzinie częstotliwości, gdzie osią odciętych jest oś częstotliwości lub pulsacji. Traktujemy sygnał x jako zmieniający się nie w funkcji czasu, ale w funkcji pulsacji i wykres sygnału w funkcji pulsacji nazywamy widmem sygnału. Widmo sinusoidy jest jednym prążkiem na pulsacji 0 . Wielkości pulsacji i częstotliwości różnią się tylko współczynnikiem 2 ( f 2 ). Pulsacją posługujemy się z reguły w rozważaniach teoretycznych, wzory z tą zmienną są krótsze. W warunkach laboratoryjnych posługujemy się pojęciem częstotliwości (przyrządy pomiarowe są wyskalowane w jednostkach częstotliwości, a nie pulsacji).

Andrzej Leśnicki Sygnał sinusoidalny 2/3
Sygnał sinusoidalny jest sygnałem mocy o wartości średniej równej zeru 00 X . Obliczymy moc sygnału sinusoidalnego o amplitudzie mX
2
2sin4
122sin4
1212sin
41
21
2cos21
21cos11
2
000
0
2
0
000
2
00
0
2
00
22
0
2
0
0
00
0
m
m
T
m
Tm
T
mT
x
X
TTXtt
TX
dttTXtX
Tdttx
TP
Ten wynik prowadzi do powszechnie znanego wzoru na wartość skuteczną sygnału sinusoidalnego
2m
xskX
PX
Na przykład według standardów energetycznych obowiązujących w Polsce, napięcie sinusoidalne w gniazdku sieciowym ma wartość skuteczną V230skV . Oznacza to, że
napięcie sieciowe ma amplitudę V27,325V2302 mV i wartość średnią półokresową
V07,207V23022222,0
skmpo VVV .
Sygnał sinusoidalny jest sygnałem antysymetrycznym i jego wartość średnia półokresowa, to
m
T
mT
mpo XT
TTX
dttT
XT
X
22cos2
22sin22
00
0
0
2
0 00,0
00
Teraz można obliczyć dla sygnału sinusoidalnego współczynnik szczytu
2
sk
ms X
Xk
i współczynnik kształtu
22,0
po
skk X
Xk
Z sygnałami sinusoidalnymi mamy bardzo często do czynienia w praktyce inżynierskiej. Jest to bardzo popularny sygnał testowy służący do badania właściwości układów elektronicznych. Generatory drgań sinusoidalnych stanowią podstawowe wyposażenie laboratoriów. Sygnały sinusoidalne są też falą nośną w sygnałach zmodulowanych. Są to sygnały łatwe do wygenerowania. Do tej pory rozpatrywano przypadek sygnału sinusoidalnego rzeczywistego, przyjmującego wartości z dziedziny liczb rzeczywistych.
Andrzej Leśnicki Sygnał sinusoidalny 3/3
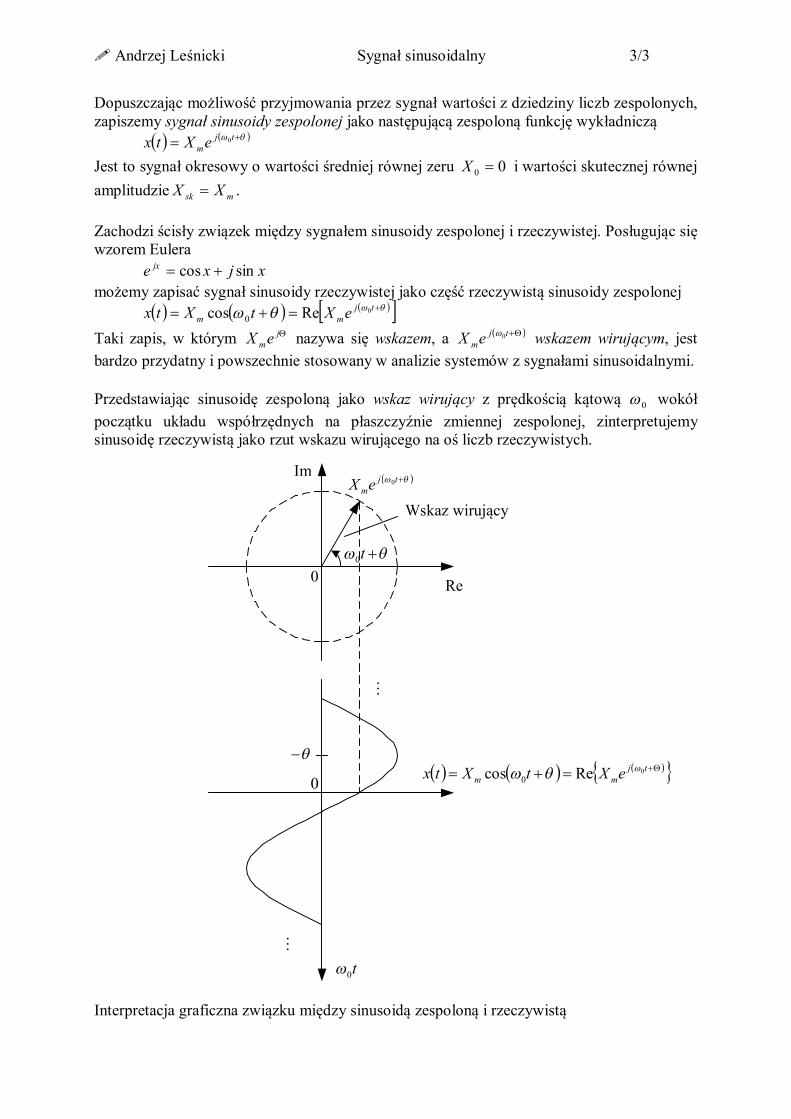
Dopuszczając możliwość przyjmowania przez sygnał wartości z dziedziny liczb zespolonych, zapiszemy sygnał sinusoidy zespolonej jako następującą zespoloną funkcję wykładniczą tj
meXtx 0 Jest to sygnał okresowy o wartości średniej równej zeru 00 X i wartości skutecznej równej amplitudzie msk XX . Zachodzi ścisły związek między sygnałem sinusoidy zespolonej i rzeczywistej. Posługując się wzorem Eulera xjxe jx sincos możemy zapisać sygnał sinusoidy rzeczywistej jako część rzeczywistą sinusoidy zespolonej tj
mm eXtXtx 0Recos 0 Taki zapis, w którym j
meX nazywa się wskazem, a tjmeX 0 wskazem wirującym, jest
bardzo przydatny i powszechnie stosowany w analizie systemów z sygnałami sinusoidalnymi. Przedstawiając sinusoidę zespoloną jako wskaz wirujący z prędkością kątową 0 wokół początku układu współrzędnych na płaszczyźnie zmiennej zespolonej, zinterpretujemy sinusoidę rzeczywistą jako rzut wskazu wirującego na oś liczb rzeczywistych.
Re
Im
0
tjmeX 0
t0
tjmm eXtXtx 0Recos 0
t0
Wskaz wirujący
0
Interpretacja graficzna związku między sinusoidą zespoloną i rzeczywistą

Andrzej Leśnicki Skok jednostkowy 1/1
Skok jednostkowy Sygnał skoku jednostkowego jest zdefiniowany następującym wzorem
tt
tutx0dla1
0dla0
Nazywa się go też jedynką Heaviside’a t1 lub najbardziej poprawnie schodkiem jednostkowym (ang. unit step - tu ). Ma on nieciągłość I rodzaju w zerze. Na ogół przyjmuje się, że sygnał ma w punkcie 0t wartość 1, chociaż może zdarzyć się, że wygodniej będzie przyjąć, iż wartość w zerze równa się 0 lub 21 . Funkcja skoku jednostkowego nie jest różniczkowalna w punkcie 0t w sensie zwykłej pochodnej, ale jest różniczkowalna w sensie pochodnej dystrybucyjnej.
tt
tutx0dla1
0dla0
0 t
1
Skok jednostkowy Sygnał skoku jednostkowego jest sygnałem przyczynowym. Pomnożenie jakiegokolwiek sygnału nieprzyczynowego tx przez skok jednostkowy tu powoduje, że w wynikowym sygnale tutx część nieprzyczynowa sygnału zostaje odcięta i pozostaje tylko część przyczynowa sygnału. Sygnał ma w przedziale czasu t wartość średnią równą 21
211
21lim
21lim
00
T
T
T
TT
dtT
dttuT
X
Moc sygnału w przedziale czasu t , to
211
21lim
21lim
0
2
T
T
T
TT
dtT
dttuT
P
Moc sygnału jest różna od zera, skończona, a więc jest to sygnał mocy.
Sygnał skoku jednostkowego dobrze modeluje skoki napięć i prądów zachodzące w układzie elektronicznym z chwilą załączenia napięć zasilających lub dokonania komutacji, przełączenia kluczy w układzie.
Andrzej Leśnicki Impuls jednostkowy 1/4
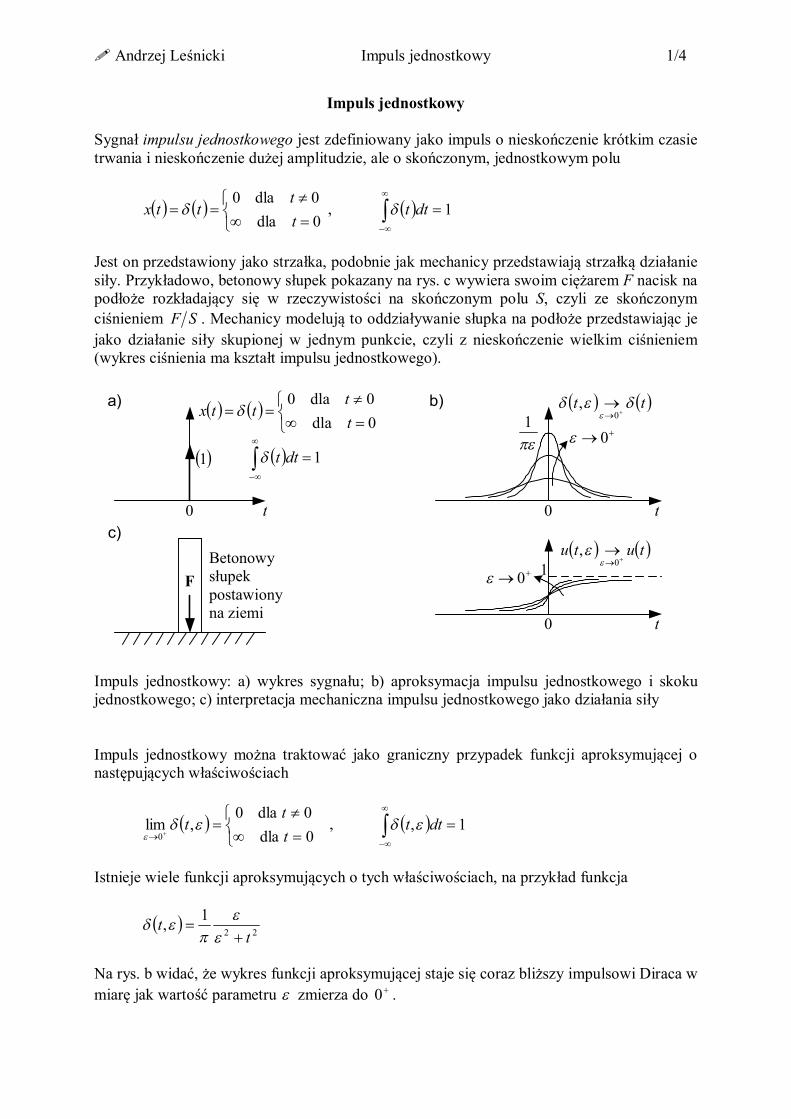
Impuls jednostkowy Sygnał impulsu jednostkowego jest zdefiniowany jako impuls o nieskończenie krótkim czasie trwania i nieskończenie dużej amplitudzie, ale o skończonym, jednostkowym polu
0dla0dla0
tt
ttx , 1
dtt
Jest on przedstawiony jako strzałka, podobnie jak mechanicy przedstawiają strzałką działanie siły. Przykładowo, betonowy słupek pokazany na rys. c wywiera swoim ciężarem F nacisk na podłoże rozkładający się w rzeczywistości na skończonym polu S, czyli ze skończonym ciśnieniem SF . Mechanicy modelują to oddziaływanie słupka na podłoże przedstawiając je jako działanie siły skupionej w jednym punkcie, czyli z nieskończenie wielkim ciśnieniem (wykres ciśnienia ma kształt impulsu jednostkowego).
F
0 t
1
0dla0dla0
tt
ttx a) b)
c)
1
dtt
Betonowy słupek postawiony na ziemi
tt
0,
tutu
0
,
t
t
0
0
1
1
0
0
Impuls jednostkowy: a) wykres sygnału; b) aproksymacja impulsu jednostkowego i skoku jednostkowego; c) interpretacja mechaniczna impulsu jednostkowego jako działania siły
Impuls jednostkowy można traktować jako graniczny przypadek funkcji aproksymującej o następujących właściwościach
0dla
0dla0,lim
0 tt
t
, 1,
dtt
Istnieje wiele funkcji aproksymujących o tych właściwościach, na przykład funkcja
22
1,t
t
Na rys. b widać, że wykres funkcji aproksymującej staje się coraz bliższy impulsowi Diraca w miarę jak wartość parametru zmierza do 0 .

Andrzej Leśnicki Impuls jednostkowy 2/4
Zauważamy, że całka z funkcji aproksymującej impuls jednostkowy jest funkcją aproksymującą skok jednostkowy
tutudt
0,,
Na przykład z powyższej funkcji aproksymującej impuls jednostkowy mamy następującą funkcję aproksymującą skok jednostkowy
tdtut
arctg1211, 22
Na dole rys. b widać, że funkcja ,tu coraz lepiej aproksymuje skok jednostkowy w miarę zmierzania wartości parametru do 0 . Tak więc w granicy całka z impulsu jednostkowego równa się skokowi jednostkowemu
tudt
Działanie odwrotne do tego całkowania nazwiemy pochodną dystrybucyjną, skąd pierwsza pochodna dystrybucyjna ze skoku jednostkowego równa się impulsowi jednostkowemu ttudystr ' Pierwsza pochodna w zwykłym sensie ze skoku jednostkowego nie istnieje, gdyż jest to funkcja z nieciągłością I-go rodzaju w zerze. Tymczasem pierwsza pochodna w sensie dystrybucyjnym istnieje i jest to istotna korzyść jaką daje posługiwanie się pojęciami z teorii dystrybucji w teorii sygnałów. Dzięki temu jesteśmy w stanie różniczkować sygnały z nieciągłościami I-go rodzaju. Co więcej, dowodzi się, że impuls jednostkowy t jest nieskończenie wiele razy różniczkowalny w sensie dystrybucyjnym (można to zbadać różniczkując wielokrotnie funkcję aproksymującą ,t i interpretując pochodne dystrybucyjne jako granice zwykłych pochodnych przy 0 ).

Andrzej Leśnicki Impuls jednostkowy 3/4
Przykład różniczkowania sygnału z nieciągłością I-go rodzaju pokazano na poniższym rysunku. W tych przedziałach czasu, w których sygnał jest funkcją ciągłą, pierwsza pochodna dystrybucyjna pokrywa się ze zwykłą pochodną. W punktach nieciągłości I-go rodzaju 1tt ,
2tt zwykła pochodna nie istnieje, ale istnieje pochodna dystrybucyjna i równa się ona impulsowi Diraca o polu równym wysokości skoku funkcji. Pole impulsu Diraca jest wartością ujętą na rysunku w nawiasach okrągłych. Można zrezygnować z nawiasów, gdy strzałki impulsów Diraca zostaną narysowane tak, że ich długości będą odpowiadały polu impulsu. Należy jednak pamiętać, że jednostki wysokości impulsów nie będą zgadzały się z jednostkami reszty wykresu. Przykładowo, jeżeli różniczkujemy sygnał napięciowy tvtx , to wykres regularnej części pierwszej pochodnej dystrybucyjnej sygnału
tvtx dystrdystr'' ma jednostki
sV , a pole impulsu Diraca ma jednostki V.
t
t
0
0
tx
txdystr'
1t 2t
2t1t
1tx
1tx 2tx
2tx
11 txtx
22 txtx
Różniczkowanie sygnału: a) sygnał; b) pierwsza pochodna dystrybucyjna sygnału Impuls jednostkowy jest sygnałem przyczynowym, skończonym, nieograniczonym, który nie jest ani sygnałem energii, ani mocy. Służy do modelowania gwałtownego pobudzenia układu elektronicznego w nieskończenie krótkim czasie (tak jak szarpnięcie struny pobudzające ją do drgania). Ważniejsze właściwości impulsu jednostkowego zestawiono w poniższej tabeli. We właściwościach mnożenia i filtrującej zakłada się, że sygnał tx jest odpowiednio funkcją ciągłą lub różniczkowalną w punkcie 0tt .

Andrzej Leśnicki Impuls jednostkowy 4/4
Tabela. Właściwości impulsu jednostkowego
1. Właściwość parzystej symetrii tt , tttt 00
2. Właściwość skalowania
ta
at 1 , 0a
3. Związki impulsu jednostkowego ze skokiem jednostkowym
tut dystr' ,
t
dtu
4. Właściwości mnożenia 00 t 000 tttxtttx 00
'0
'00
' tttxtttxtttx dystrdystr
k
m
kdystr
mmkdystr tttx
mk
tttx0
000 1
5. Właściwości filtrujące
00 txdttttx
0'
0'
0' txdttttxdttttx dystr
000 11 txdttttxdttttx kkkkkdystr
6. Energia impulsu jednostkowego
tdtt
2
Andrzej Leśnicki Sygnał AM 1/2
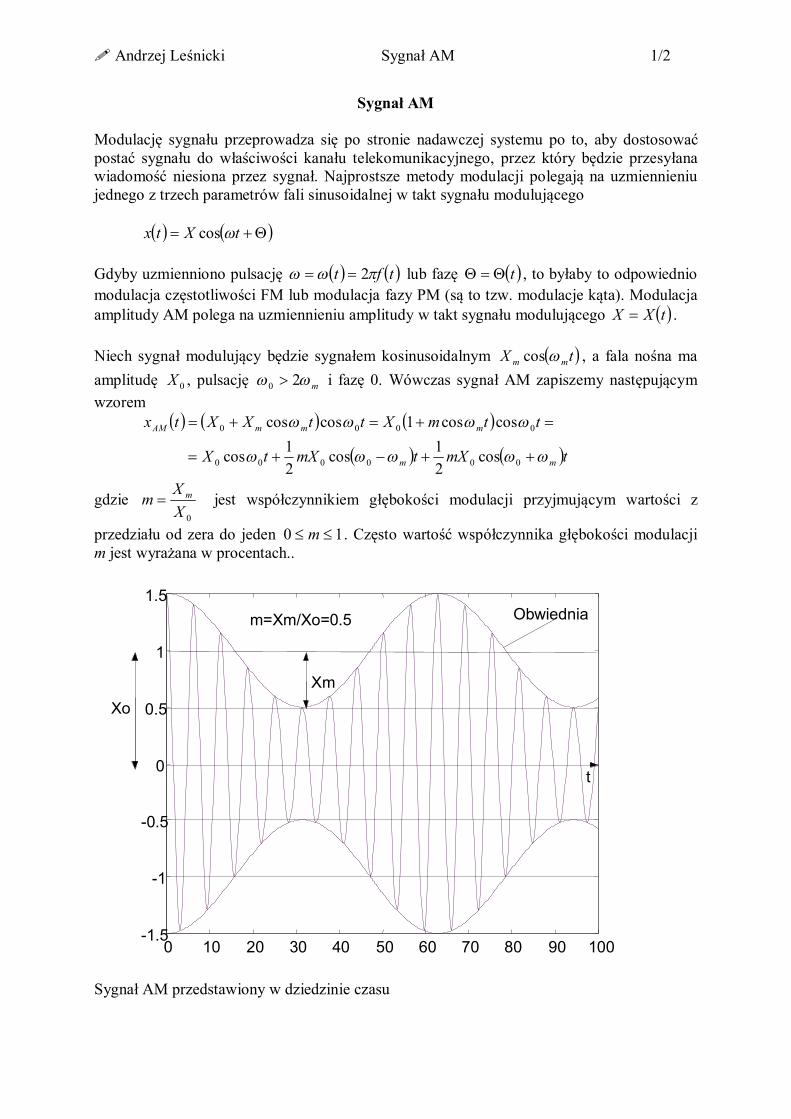
Sygnał AM Modulację sygnału przeprowadza się po stronie nadawczej systemu po to, aby dostosować postać sygnału do właściwości kanału telekomunikacyjnego, przez który będzie przesyłana wiadomość niesiona przez sygnał. Najprostsze metody modulacji polegają na uzmiennieniu jednego z trzech parametrów fali sinusoidalnej w takt sygnału modulującego tXtx cos Gdyby uzmienniono pulsację tft 2 lub fazę t , to byłaby to odpowiednio modulacja częstotliwości FM lub modulacja fazy PM (są to tzw. modulacje kąta). Modulacja amplitudy AM polega na uzmiennieniu amplitudy w takt sygnału modulującego tXX . Niech sygnał modulujący będzie sygnałem kosinusoidalnym tX mm cos , a fala nośna ma amplitudę 0X , pulsację m 20 i fazę 0. Wówczas sygnał AM zapiszemy następującym wzorem
tmXtmXtX
ttmXttXXtx
mm
mmmAM
000000
0000
cos21cos
21cos
coscos1coscos
gdzie 0X
Xm m jest współczynnikiem głębokości modulacji przyjmującym wartości z
przedziału od zera do jeden 10 m . Często wartość współczynnika głębokości modulacji m jest wyrażana w procentach..
0 10 20 30 40 50 60 70 80 90 100 -1.5
-1
-0.5
0
0.5
1
1.5
t
Xo Xm
m=Xm/Xo=0.5 Obwiednia
Sygnał AM przedstawiony w dziedzinie czasu
Andrzej Leśnicki Sygnał AM 2/2
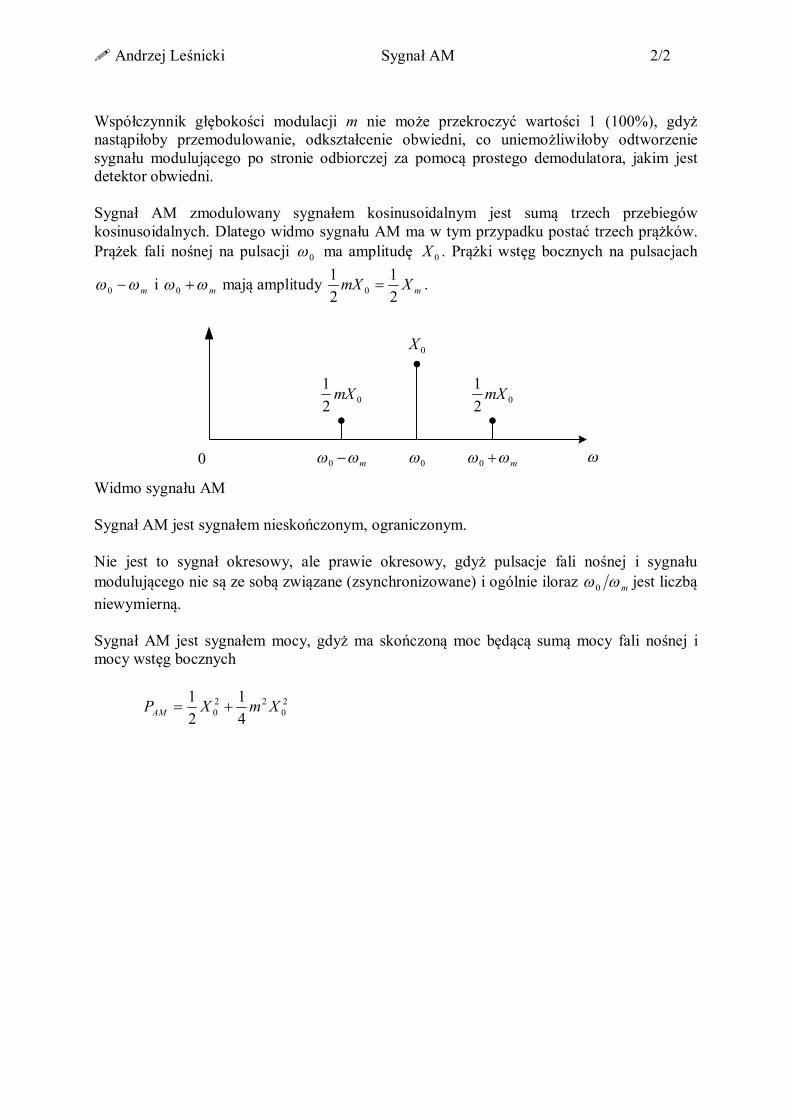
Współczynnik głębokości modulacji m nie może przekroczyć wartości 1 (100%), gdyż nastąpiłoby przemodulowanie, odkształcenie obwiedni, co uniemożliwiłoby odtworzenie sygnału modulującego po stronie odbiorczej za pomocą prostego demodulatora, jakim jest detektor obwiedni. Sygnał AM zmodulowany sygnałem kosinusoidalnym jest sumą trzech przebiegów kosinusoidalnych. Dlatego widmo sygnału AM ma w tym przypadku postać trzech prążków. Prążek fali nośnej na pulsacji 0 ma amplitudę 0X . Prążki wstęg bocznych na pulsacjach
m 0 i m 0 mają amplitudy mXmX21
21
0 .
0X
021 mX 02
1 mX
0 m 0m 0 0
Widmo sygnału AM Sygnał AM jest sygnałem nieskończonym, ograniczonym. Nie jest to sygnał okresowy, ale prawie okresowy, gdyż pulsacje fali nośnej i sygnału modulującego nie są ze sobą związane (zsynchronizowane) i ogólnie iloraz m0 jest liczbą niewymierną. Sygnał AM jest sygnałem mocy, gdyż ma skończoną moc będącą sumą mocy fali nośnej i mocy wstęg bocznych
20
220 4
121 XmXPAM
Andrzej Leśnicki Sygnał FM 1/4
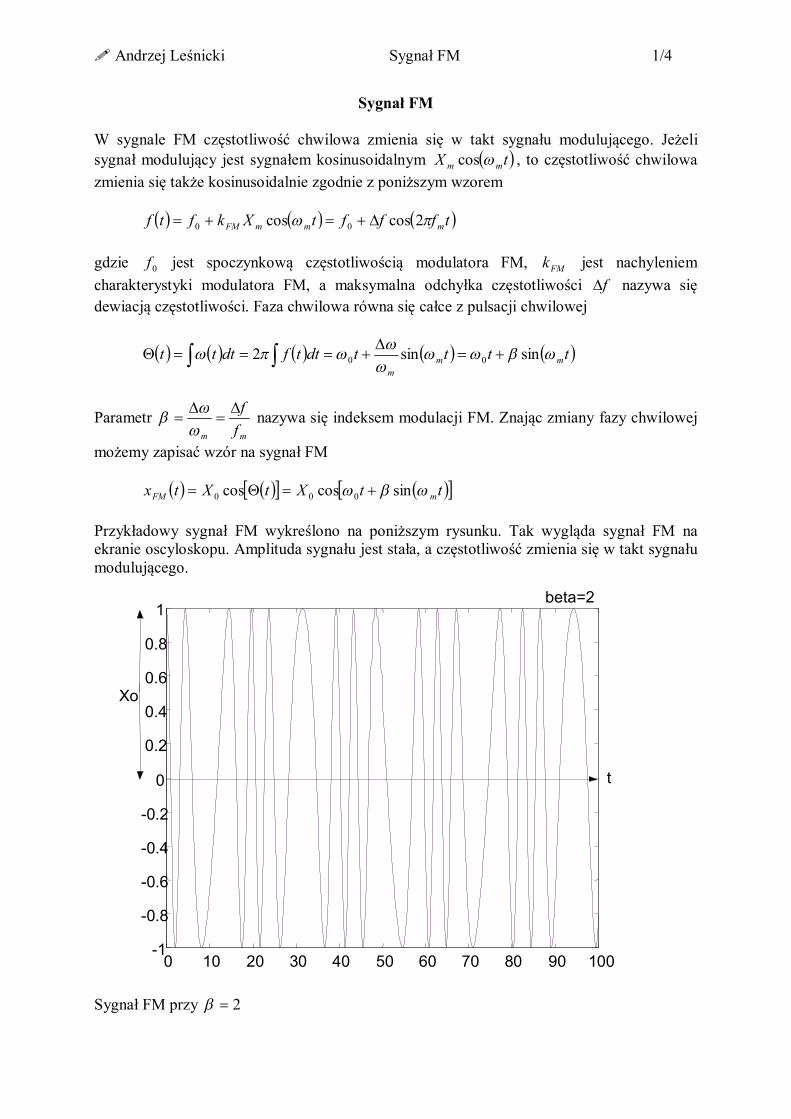
Sygnał FM W sygnale FM częstotliwość chwilowa zmienia się w takt sygnału modulującego. Jeżeli sygnał modulujący jest sygnałem kosinusoidalnym tX mm cos , to częstotliwość chwilowa zmienia się także kosinusoidalnie zgodnie z poniższym wzorem tffftXkftf mmmFM 2coscos 00 gdzie 0f jest spoczynkową częstotliwością modulatora FM, FMk jest nachyleniem charakterystyki modulatora FM, a maksymalna odchyłka częstotliwości f nazywa się dewiacją częstotliwości. Faza chwilowa równa się całce z pulsacji chwilowej
ttttdttfdttt mmm
sinsin2 00
Parametr mm ff
nazywa się indeksem modulacji FM. Znając zmiany fazy chwilowej
możemy zapisać wzór na sygnał FM ttXtXtx mFM sincoscos 000 Przykładowy sygnał FM wykreślono na poniższym rysunku. Tak wygląda sygnał FM na ekranie oscyloskopu. Amplituda sygnału jest stała, a częstotliwość zmienia się w takt sygnału modulującego.
0 10 20 30 40 50 60 70 80 90 100 -1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
t
Xo
beta=2
Sygnał FM przy 2

Andrzej Leśnicki Sygnał FM 2/4
Kształt widma sygnału FM zbadamy rozwijając sygnał w następujący szereg
}3cos3cos
2cos2coscoscos
cos{
cos
sincos
003
002
001
000
00
00
ttJttJ
ttJtJX
tnJX
ttXtx
mm
mm
mm
mn
n
mFM
Nośna Wstęga dolna Wstęga górna W powyższym rozwinięciu współczynnikami rozwinięcia są wartości funkcji Bessela pierwszego rodzaju nJ . Funkcje Bessela pierwszego rodzaju mają następujące właściwości
nn
n JJ 1
121
220
nnJJ
Z drugiej właściwości wynika, że sygnał FM ma stałą moc
20
1
220
20 2
1221 XJJXP
nnFM
równą mocy fali nośnej niezależnie od treści sygnału modulującego i wartości indeksu modulacji .
Andrzej Leśnicki Sygnał FM 3/4
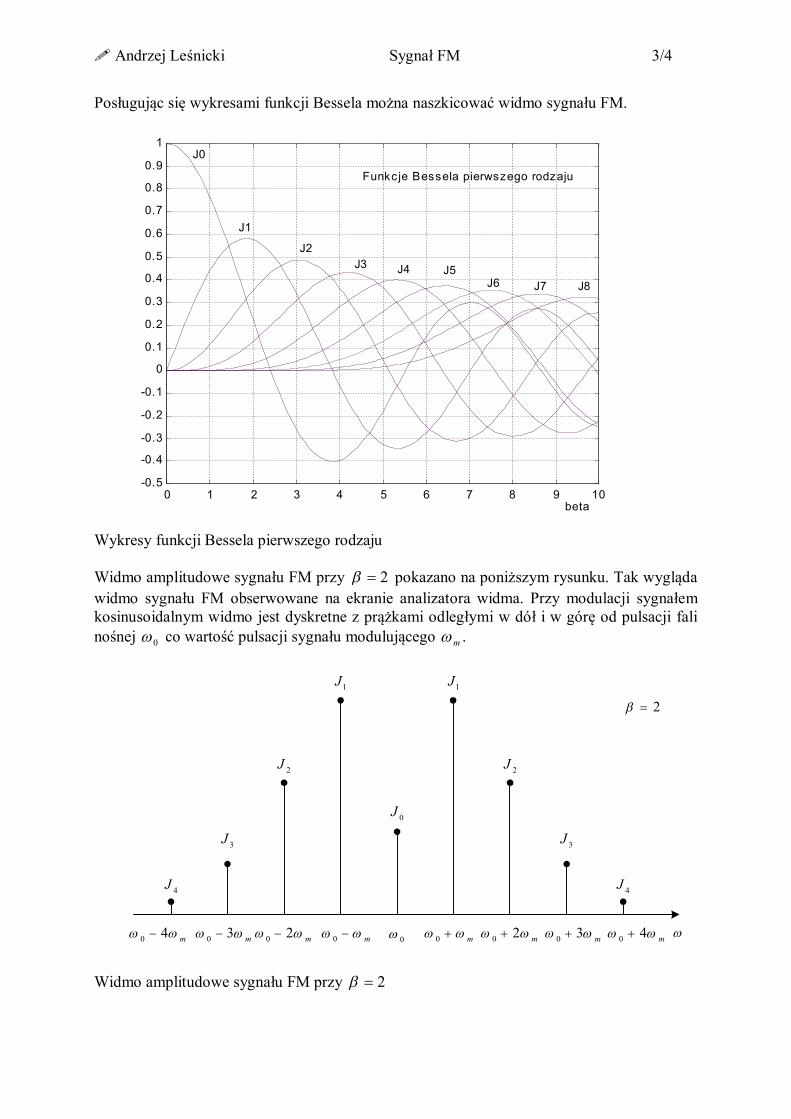
Posługując się wykresami funkcji Bessela można naszkicować widmo sygnału FM.
0 1 2 3 4 5 6 7 8 9 10-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
beta
J0
J1
J2 J3 J4 J5
J6 J7 J8
Funkcje Bessela pierwszego rodzaju
Wykresy funkcji Bessela pierwszego rodzaju Widmo amplitudowe sygnału FM przy 2 pokazano na poniższym rysunku. Tak wygląda widmo sygnału FM obserwowane na ekranie analizatora widma. Przy modulacji sygnałem kosinusoidalnym widmo jest dyskretne z prążkami odległymi w dół i w górę od pulsacji fali nośnej 0 co wartość pulsacji sygnału modulującego m .
0
0J
2
1J 1J
2J 2J
3J 3J
4J 4J
m 0m 0 m 20 m 20 m 30 m 30 m 40 m 40
Widmo amplitudowe sygnału FM przy 2

Andrzej Leśnicki Sygnał FM 4/4
Teoretycznie widmo sygnału FM ma nieskończenie wiele prążków i jest nieskończenie szerokie. Zauważamy jednak na wykresach, że funkcje nJ przyjmują wartości znacząco większe od zera dopiero dla większych wartości , tym większych im wyższy jest rząd funkcji. Dlatego liczącą się wartość w widmie mają tylko prążki skupione wokół częstotliwości fali nośnej. Efektywną szerokość widma sygnału FM określa się ze wzoru Carsona fffB mmFM 212 uwzględniającego prążki widma o amplitudach powyżej 5% wartości 0X . Dokładniejszy jest wzór Manajewa 12 mFM fB uwzględniający prążki widma o amplitudach większych niż 1% wartości 0X . Z wykresu widma wnioskujemy, że w modulatorze FM częstotliwość fali nośnej musi być dostatecznie duża w porównaniu z maksymalną wartością częstotliwości sygnału modulującego 120 mFM fBf . Funkcje nJ zerują się dla określonych wartości . Można to wykorzystać do pomiaru dewiacji częstotliwości f modulatora FM. Na wejście modulatora FM należy podać kosinusoidaly sygnał modulujący i zmniejszać jego częstotliwość mf obserwując jednocześnie widmo sygnału FM na ekranie analizatora widma. Prążek na częstotliwości fali nośnej 0f będzie malał, aż osiągnie wartość 0 dla 405,2 , gdyż 0405,20 J . Tak więc wartość dewiacji częstotliwości, to mff 405,2 . Zmniejszając dalej częstotliwość mf (zwiększając ) zaobserwujemy zerowanie się prążków widma na częstotliwościach mff 0 dla 832,3 , gdyż 0832,31 J ; następnie na częstotliwościach mff 20 , dla 135,5 , gdyż 0135,52 J ; itd. Sygnał FM jest sygnałem nieskończonym, ograniczonym, mocy, prawie okresowym. W przeciwieństwie do sygnału AM zasadnicza część mocy przypada na wstęgi boczne, a nie na falę nośną. Sygnał FM ma szersze widmo niż sygnał AM i dlatego jest bardziej odporny na szumy i zakłócenia.





























