Embed Size (px)
DESCRIPTION
itz know for completing paralax concepts of vanity
Citation preview

AndroRC: An Android Remote Control Car Unit for Search Missions
Yuxin Jing, Letian Zhang, Irwin Arce, Aydin Farajidavar Integrated Medical Systems Laboratory, Dept. of Electrical and Computer Engineering
New York Institute of Technology Old Westbury, NY, United States of America
[email protected], [email protected], [email protected], [email protected]
Abstract— The AndroRC is a remote control car (RC) unit controlled by a smartphone running on an Android application. The car is meant to be used in search missions in the occurrence of natural disasters. It is developed to autonomously avoid obstacles that are not visible to the user driver. The RC unit is developed based on a Tamiya 70112 Buggy car chassis set with an extra servo motor added to provide the left and right directions. The RC is equipped with an ultrasonic distance sensor, a camera, a Bluetooth receiver, a Wi-Fi transmitter, two 9-V batteries and two Arduino microcontroller boards (UNO and MEGA). The Arduino MEGA controls the propulsion and direction, while the UNO processes the information received from the distance sensor to stop the RC at a pre-defined distance.
The Android application uses the embedded orientation sensor on the smartphone to determine the four directions (forward, backward, left and right) intended by the user; hence, rotating the smartphone to different directions results in to the corresponding propulsion of the RC unit. The control commands are transmitted to the RC unit through the Bluetooth communication. The Android application also receives (via Wi-Fi) and displays the information from the camera in real-time. The AndroRC was characterized and examined on bench-top settings.
Keywords- Search missions, Remote control car, Android devices
I. INTRODUCTION More than 2 million people were killed in ‘natural’ disasters
worldwide between 1974 and 2003 [1]. Natural disasters such as earthquakes, tsunamis, hurricanes frequently catch us by surprise and cause large-scale damage to buildings. As a result the search and rescue operations happen in the field of collapsed buildings. The use of heavy machinery is prohibited because they add extra weight on the rubble and destabilize the structures, which in turn risks the lives of survivors buried in the rubble. Rescue crew often use trained search dogs, cameras and listening gadgets to search for victims from the ground surface. Although search dogs are effective in finding human under the rubble, they are unable to provide a general description about the environment that the victims are located [2].
In the recent years, robots controlled wirelessly have been utilized in the search and rescue missions. These robots should
be able to navigate deep into rubbles to search for possible survivors and to transfer critical data and video to the rescuers. Information obtained through robots can help the rescuers to obtain a quick overview of the affected areas. However, the robots used in the search missions are often expensive and not accessible in most of the undeveloped countries.
The mobile telecommunications and the internet have highly penetrated in the daily living of people around the world. The mobile telephony technology is even highly penetrated in undeveloped counties. It is estimated that in 2014, more than 4.55 billion people use a mobile phone worldwide. More than a third of this population is using a smartphone. As the result the market for developing new applications for these smartphones is booming [3]. Smartphones are also equipped with inertia and orientation sensors and different communication technologies (Wi-Fi, Bluetooth, and cellular) that make them suitable hand-held platforms for a variety of novel applications [4].
In this paper, we are presenting an inexpensive remote control car (RC) platform that can be controlled via a smartphone. All of the components of the RC platform are commercially available through a variety of vendors. An Android application has been developed that uses the orientation sensor embedded in the smartphone to translate the rotations of the smartphone into various propulsion commands for the RC unit. The commands are wirelessly transmitted to the RC unit through a Bluetooth communication. Furthermore, the RC unit streams live videos to the smartphone via Wi-Fi communication. Fig. 1 illustrates the block diagram of the system.
II. RELATED WORKS Similar concepts to this idea have already been developed. A
team from the University of Pretoria in South Africa designed a wireless remote controlled car using the internet as a medium [5]. The wireless car was controlled over the internet and it streamed live video to the user. This system is bulky and has been implemented using computers. Therefore, it cannot easily maneuver under the rubbles.
Police and military forces already have remote controlled units in which they use as bomb disposals in certain situations. The only purpose though is to remove the explosives. These units have very precise robotic arms and stream high quality
videos in real-time. However, they are expensive and bulky, hence, not suitable for search missions.
A low-cost quadrocopter with similar concept to the proposed AndroRC unit was designed at the University of Tübingen [6]. The team designed an Unmanned Aerial Vehicle (UAV) that can be controlled remotely using an iPad. They also have programmed a second quadrocopter that automatically follows the lead quadrocopter tracking patterns of emitted infrared lights. The proposed UAV can be deployed to a variety of missions; however, it is not suited to penetrate under the rubbles to find survivors.
III. SYSTEM OVERVIEW The system is composed of a remote control car (RC) unit
and an Android smartphone running on a custom-made application. In the following we have described the RC unit and the Android application that collectively makes the AndroRC system.
A. The RC Unit The AndroRC is based on Tamiya 70112 Buggy Car Chassis
set [7], which is a commercially-available car set, with adjustable speed settings for high or low outputs. The wooden chassis was modified to make the unit longer to accommodate more hardware on top of the chassis. In addition, the front nose of the chassis was modified to fit an extra servo motor that rotates the front wheels to the left and right directions.
The Arduino MEGA board [8], which includes an ATMega2560 microcontroller, is secured in the center of the wooden chassis. The Arduino MEGA board includes 54 digital input/output pins (of which 14 can be used as PWM outputs), 16 analog inputs, 4 UARTs (hardware serial ports), a 16 MHz crystal oscillator, a USB connection, and recommended input voltage of 7-12 V. The Arduino MEGA board generates the control pulses for the forward/backward and left/right propulsions through the dc motor and servo motor installed in the back and in the front of the chassis, respectively. The MEGA board operates on 5 V. A Bluetooth receiver (BT2S) is
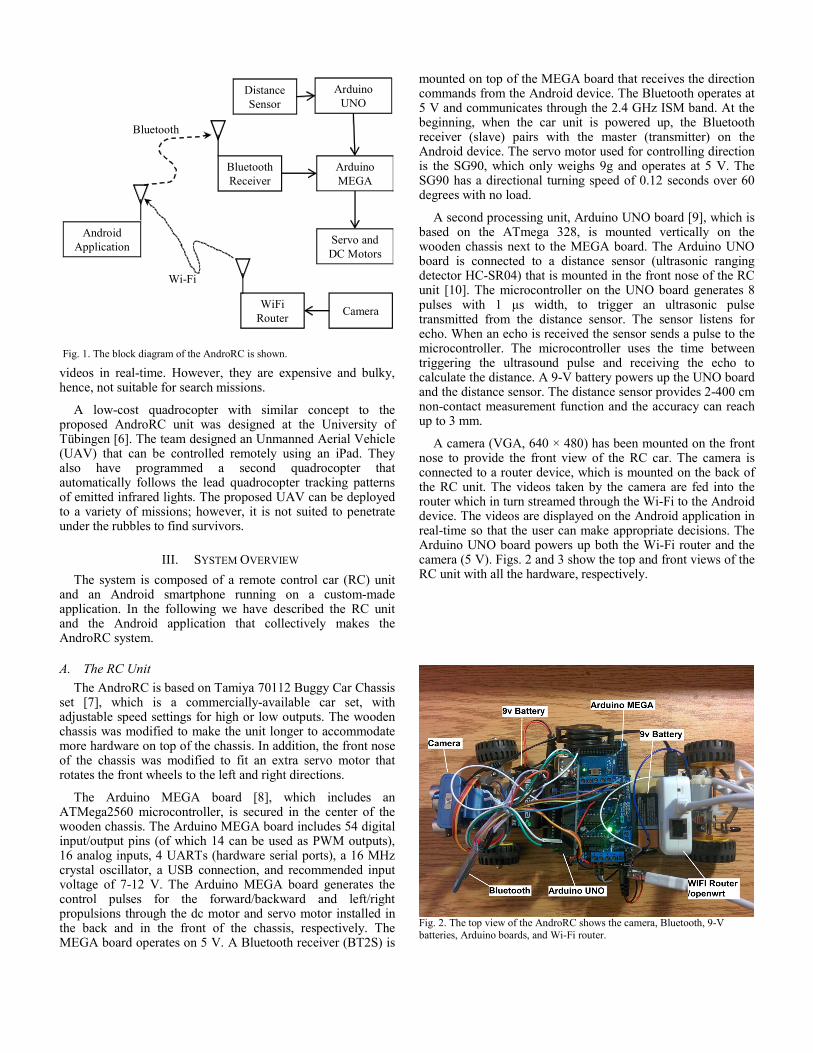
mounted on top of the MEGA board that receives the direction commands from the Android device. The Bluetooth operates at 5 V and communicates through the 2.4 GHz ISM band. At the beginning, when the car unit is powered up, the Bluetooth receiver (slave) pairs with the master (transmitter) on the Android device. The servo motor used for controlling direction is the SG90, which only weighs 9g and operates at 5 V. The SG90 has a directional turning speed of 0.12 seconds over 60 degrees with no load.
A second processing unit, Arduino UNO board [9], which is based on the ATmega 328, is mounted vertically on the wooden chassis next to the MEGA board. The Arduino UNO board is connected to a distance sensor (ultrasonic ranging detector HC-SR04) that is mounted in the front nose of the RC unit [10]. The microcontroller on the UNO board generates 8 pulses with 1 μs width, to trigger an ultrasonic pulse transmitted from the distance sensor. The sensor listens for echo. When an echo is received the sensor sends a pulse to the microcontroller. The microcontroller uses the time between triggering the ultrasound pulse and receiving the echo to calculate the distance. A 9-V battery powers up the UNO board and the distance sensor. The distance sensor provides 2-400 cm non-contact measurement function and the accuracy can reach up to 3 mm.
A camera (VGA, 640 × 480) has been mounted on the front nose to provide the front view of the RC car. The camera is connected to a router device, which is mounted on the back of the RC unit. The videos taken by the camera are fed into the router which in turn streamed through the Wi-Fi to the Android device. The videos are displayed on the Android application in real-time so that the user can make appropriate decisions. The Arduino UNO board powers up both the Wi-Fi router and the camera (5 V). Figs. 2 and 3 show the top and front views of the RC unit with all the hardware, respectively.
Arduino MEGA
Arduino UNO
Servo and DC Motors
Bluetooth Receiver
Android Application
Distance Sensor
WiFiRouter Camera
Bluetooth
Wi-Fi
Fig. 1. The block diagram of the AndroRC is shown.
Fig. 2. The top view of the AndroRC shows the camera, Bluetooth, 9-V batteries, Arduino boards, and Wi-Fi router.

Fig. 4 depicts the flow charts that the two microcontrollers
(on the UNO and MEGA boards) follow to execute the defined specifications. If the distance calculated by the ATmega 328 microcontroller on the UNO board is shorter than 20 cm, an interrupt command will be sent to the ATMega2560 microcontroller on the MEGA board to shut down the DC motor to avoid possible collisions. If the calculated distance is longer than 20 cm, no interrupt command will be sent to the MEGA board and the motors continue their routine flow chart (MEGA’s flow chart on the left side).
B. The Application for Android Smartphone An application was developed that can be installed on an
Android smartphone to control the RC unit and receive the videos. Fig. 5 shows the main blocks of the application. The videos received through the Wi-Fi will be captured by the InputStream.java and will be displayed on the smartphone’s screen using the MjpegView.java. A screenshot of the videos received by application is shown in Fig. 6. There are two objects in front of the RC unit in this figure to provide a view on the distance.
The application also calls the information of the orientation sensor –embedded in the smartphone– to obtain the angles between the phone and a default coordinate defined by the Android sensor manager. The application then uses pre-defined thresholds to translate the orientation data into propulsion commands. These commands are forward, backward, left, and right. For instance, when the angle between the phone and the Y axis breaches -10º, the application sends a "1" to the Arduino MEGA board, which then translates into "forward” propulsion. The application is designed to be intuitive. Fig. 7 shows the direction of the propulsion commands based on the orientation of the smartphone.
IV. SYSTEM CHARACHTERIZATION AND EXPERIMENTS The RC unit weighs 850 g and measures 23 × 11 × 9 cm3.
With no extra load the maximum speed of the RC unit is approximately 50 cm/s. It can carry up to 600 g extra load. The RC unit is powered up by two 9 V batteries; one for each Arduino board. The current consumption from each battery was approximately measured as 0.70 A in full load. The details of the current consumption for the MEGA and UNO boards are shown in Tables I and II, respectively.
Fig. 3. The front view of the AndroRC shows the camera, ultrasonic sensor, Bluetooth, servo motor, Arduino UNO board, and Wi-Fi router.
Receiving data from the
smartphone
start
Calculating the distance data with UNO
Control the DC and servo motors
Ultrasonic sensor
Decoding and translating the
instructions sent by the smartphone
Is distance shorter than
20 cm?
Shut down the DC motor
Control the DC motor
Pairing with the smartphone
Bluetooth by MEGA
Yes
No
start
MEGA UNO
Fig. 4. Flow chart of the hardware processors, Arduino MEGA and UNO boards.
Socketclient.java to transmit data to the BT
MjpegView.java for display
InputStream.javaFrom the wi-fi camera
Main.javaCalculates the angle and issues
command
Fig. 5. The main blocks of the Android application

The maximum range of the Bluetooth and Wi-Fi communications between the RC unit and the Android device were measured as 10 m and 20 m, respectively in open space. The autonomous stopping distance of the RC unit was measured between 1 cm to 10 cm from an obstacle, when set at 20 cm; hence the RC unit did not collide with the obstacle.
TABLE I. CURRENT CONSUMPTION OF THE ARDUINO MEGA BOARD AT 9 V
Arduino MEGA Power and Voltage Part(s) Current (A)
Arduino MEGA 2560 0.04
MEGA and motor driver 0.10
MEGA, motor driver, and BT 0.12
MEGA, motor driver, BT, and DC motor 0.48 - 0.53
MEGA, motor driver, BT, and servo motor 0.50
MEGA, motor driver, BT, DC and servo motors 0.72
TABLE II. CURRENT CONSUMPTION OF THE ARDUINO UNO BOARD AT 9V
Arduino UNO Power and Voltage Part(s) Current (A)
Arduino UNO 0.04
UNO and Wi-Fi camera 0.20 - 0.24
UNO and distance sensor 0.50
UNO, Wi-Fi camera, and distance sensor 0.65 - 0.70
V. CONCLUSIONS AND FUTURE WORKS We have designed and fabricated a RC unit that can be wirelessly controlled via an Android device (such as a smartphone or a tablet). The system is meant for search missions under the rubbles in the occurrence of natural disasters. The RC unit is small enough to maneuver and pass through tight spaces. The car is light enough not to add extra weight on the rubbles and risk the lives of possible survivors. The components of the RC unit can be acquired from electronic vendors at the cost under $300. Considering the fact that the smartphones are abundantly available in most of the societies and installation of an application does not impose extra cost, we conclude that the AndroRC is an economical tool for search missions in the occurrence of natural disasters.
The current measurements of the AndroRC showed that the power consumption of the system at full load is relatively high. However, knowing which components are consuming most of the power, we plan to modify the Android application to accommodate modular control of each component. For instance, we will turn off the distance sensor through the Android application, while the camera shows wide open field with no obstacle. The current consumption test also revealed that the 9 V batteries have to be substituted with more powerful batteries. This is feasible without much modification, since the AndroRC can easily carry more weights.
In the future, we are planning to add more distance sensors around the RC unit and replace the microcontroller on the UNO board with a field programmable gate array (FPGA). This will potentially increase the processing power and speed, and will further decrease the power consumption. These additional sensors will also help the AndroRC to behave as an autonomous agent, when the wireless communication with the Android device is broken.
Objects
Fig. 6. A screenshot of the video streamed to the application from the RC unit. Two objects are in front of the RC unit.
Z (Yaw), not used
Y (Roll) for forward and backward commands
X (Pitch) for left and right commands
Fig. 7. The translation of the orientations to different propulsion commands

REFERENCES
[1] D. Guha-Sapir, D. Hargitt and P. Hoyois,“Thirty Year of Natural Disasters 1974-2003: The Numbers”, UCL Press, 2004.
[2] A. Ko and H. Y. K. Lau, “Robot Assisted Emergency Search and Rescue System With a Wireless Sensor Network,” Int. J. of Adv. Sci and Tech., Vol. 3, pp. 69-78, Feb. 2009.
[3] E-Marketer. (Jan. 2016). Smartphone Users Worldwide Will Total 1.75 Billion in 2014 [Online]. Available: http://www.emarketer.com /Article/Smartphone-Users-Worldwide-Will-Total-175-Billion2014/ 1010536#qgr DZGBFZdMOv7Bo.99]
[4] B. G. Chun, P. Maniatis, “Augmented Smartphone Applications Through Clone Cloud Execution,” Conf. Proc. Hot Topics in Operating Systems (HotOS’09), May 2009.
[5] A. J. Lubbe and P. Kluge, “Development and Testing of a Wireless Controlled Car Using the Internet as Communication Medium” South African Journal of Industrial Engineering, vol. 19, no. 1, pp. 137-147, May 2008.
[6] K. E. Wenzel, A. Masselli and A. Zell, “Visual Tracking and Following of a Quadrocopter by Another Quadrocopter” Conf. Proc. IEEE Intl. Rob. Syst. (IROS), pp. 4993-4998, Oct. 2012.
[7] Tamiya USA, Buggy Car Chassis Set [Online], Available: https://www.tamiyausa.com/items/geniuseries-educational-kits-50/ educational-construction-38000/buggy-car-chassis-set-70112
[8] Arduino, Arduino Mega 2560 [Online], Available: http://arduino.cc/en/Main/arduinoBoardMega2560
[9] Arduino, Arduino UNO [Online], Available: http://arduino.cc/en/Main/ArduinoBoardUno
[10] Saint Smart, Ultrasonic Ranging Detector Mod HC-SR04 Distance Sensor [Online], Available: http://www.sainsmart.com/ultrasonic-ranging-detector-mod-hc-sr04-distance-sensor.html
![[IEEE 2014 IEEE Long Island Systems, Applications and Technology Conference (LISAT) - Farmingdale, NY, USA (2014.5.2-2014.5.2)] IEEE Long Island Systems, Applications and Technology (LISAT) Conference 2014 - AndroRC: An Android remote control car unit for search missions](https://img.dokumen.tips/doc/110x75/57509f841a28abbf6b1a6256/ieee-2014-ieee-long-island-systems-applications-and-technology-conference-588e5fb06b8c2.jpg)