Embed Size (px)
Citation preview

Analytical Models
of Critical Reactors
in Simple Geometries
Alexander Arzhanov
SA104X Degree Project in Engineering Physics, First Level

2
Supervisor: Jan Wallenius
Department of Physics
School of Engineering Sciences
Royal Institute of Technology (KTH)
Stockholm, Sweden, 2010
TRITA-FYS 2010:19
ISSN 0280-316X
ISRN KTH/FYS/--10:19--SE

3
Abstract
This bachelor thesis presents an analytical approach to obtain neutron flux distribution function of a critical nuclear reactor in the multigroup approximation. We start with an overview of some basic reactor concepts and tackle the problem with a simple geometry of an infinite slab reactor, where we assume all neutrons to be monoenergetic. Thereafter, we successively treat a few more realistic cases, introducing a more complex geometry as well as several zones of a reactor. Gradually we arrive at two-group approximation evaluations of neutron flux distribution functions in a spherical reflected reactor.
Detta kandidatarbete presenterar en analytisk ansats för att härleda neutronfördelnings-
funktioner i en kritisk reaktor med multigrupp approximationer. Vi börjar med en översikt av några viktiga grundkoncept för kärnreaktorer och angriper problemet för en enkel geometri bestående av en oändlig reaktorskiva. Därefter behandlar vi stegvis några mer realistiska fall med komplexare geometrier och flera zoner i reaktorn. Gradvis kommer vi till en två-grupp approximation av neutronfördelningsfunktioner i fallet för en reflektorkläd reaktor.

4
5
Contents
1 Introduction ............................................................................................................................................... 6
1.1 Background ........................................................................................................................................ 6
1.2 Scope ................................................................................................................................................... 6
1.3 Objectives ........................................................................................................................................... 6
2 An overview of basic reactor physics concepts..................................................................................... 7
2.1 Nuclear reactions ............................................................................................................................... 7
2.2 Microscopic cross-sections .............................................................................................................. 8
2.3 Macroscopic cross-sections ............................................................................................................. 9
2.4 Neutron density ................................................................................................................................. 9
2.5 Reaction rate and neutron flux ...................................................................................................... 10
2.6 Nuclear reactor and multiplication factor .................................................................................... 11
3 A brief description of diffusion approximation .................................................................................. 12
3.1 General considerations ................................................................................................................... 12
3.2 One-group approximation ............................................................................................................. 13
3.3 Multi-group approximation ........................................................................................................... 13
3.4 Eigenvalue problem ........................................................................................................................ 15
4 Neutron distribution in a critical reactor .............................................................................................. 16
4.1 One-group bare reactor in slab geometry .................................................................................... 16
4.2 One-group reflected reactor in slab geometry ............................................................................ 18
4.3 Two-group bare reactor in spherical geometry ........................................................................... 21
4.4 Two-group reflected reactor in spherical geometry ................................................................... 24
4.5 Sample calculations in two-group reflected reactor ................................................................... 29
5 Discussion ................................................................................................................................................. 33
6 Summary and Conclusions ..................................................................................................................... 33
Bibliography ...................................................................................................................................................... 34

6
1 Introduction
The electrical power requirement of the world continues to increase rapidly. Nowadays, the principal sources of energy consumption for most countries are still coal, oil and natural gas. However, some experts predict that the reserves of these natural resources will not even last for the XXI century, if not replaced by alternative sources of energy. One of the solid candidates is the nuclear power.
Nuclear reactors make use of radiation and radioactive material, through reactions that produce millions of times more energy per reaction than any other known source of energy. Originating from the nucleus of an atom, nuclear energy has proved to be a tremendous source of energy for mankind. The ever rapidly developing nuclear power reached its share of global electricity production at 15% by 2006 [1]. As of March 21, 2010 the 437 nuclear power plant units in 30 countries with an installed electric net capacity of about 371 GW are in operation, while 55 more plants with an installed capacity of 51 GW under construction in 15 countries [2].
The constantly raising thermal efficiency in power production of a nuclear reactor is, amongst others, a result of continuously improving nuclear reactor design. Nevertheless, the importance of simple and reasonably accurate models of reactors could not be underestimated, as they allow for rapid computations of most important reactor characteristics and properties.
1.1 Background
This academic manuscript treats and discusses one- and two-group diffusion theory in application to critical reactors of several simple geometries. The mathematical apparatus used here is basically systems of ordinary differential equations presented in a form of eigenvalue and eigenfunction problems. Two transcendental algebraic equations to find the multiplication factor in corresponding models are the only part of this work that must be solved numerically, for example in MATLAB. All other evaluations have been done analytically.
1.2 Scope
The scope of this work is the diffusion theory approximation of neutron flux distribution in a nuclear reactor in simple geometries. The cases treated here are: one-group bare reactor in slab geometry, one-group reflected reactor in slab geometry, two-group bare reactor in spherical geometry and two-group reflected reactor in spherical geometry.
1.3 Objectives
The current thesis aims to involve students into an interesting realm of nuclear reactor theory. In particular, one of its prime goals is a detailed study of some basic analytical methods and suitable approximations of nuclear reactor calculations and design.

7
2 An overview of basic reactor physics concepts.
2.1 Nuclear reactions
Being electrically neutral neutrons can penetrate deeper into a sample of matter than electrons. In consequence that they interact with nuclei rather than electron clouds, neutrons are of enormous importance in producing nuclear energy in fission reactors.
What are the possible outcomes of neutrons’ bombardment of a nucleus? According to the model of nuclear reactions proposed by Nils Bohr, a feasible reaction would be a creation of a compound nucleus. The resulting nucleus is always in an excited state, tending to shed the surplus energy in various ways. One of them involves emitting of γ-particles - such reaction is called the radioactive capture. Sometimes the rearrangement of the surplus energy in an excited nucleus leads to the ejection of a neutron (usually with less energy) - this is an example of scattering. Generally speaking, by “scattering” we mean a process of neutron-nucleus interaction, with the final product of neutron and the initial nucleus.
There are also charged-particle reactions involving emissions of a proton or an α-particle, as well as neutron-producing reactions, where 2 or 3 neutrons are liberated from the nucleus.
These reactions aside, there is a fission reaction – the principle source of nuclear energy for practical applications. It is available for several substances with heavy nuclei (e.g. uranium, plutonium) and involves creation of a highly unstable compound nucleus, which decays into several smaller fragments accompanied by the emission of a few neutrons and a large amount of energy. The types of neutron interaction with matter are schematically shown in Figure 1.
Figure 1. Types of neutron interaction with matter.
Neutron Interaction
Scattering Absorption
Elastic Inelastic Fission Capture
(n,γ) N. mult. (n,2n) (n,3n)
...
(n,p) (n,α)

8
2.2 Microscopic cross-sections
The extent to which neutrons interact with nuclei is described by quantities named cross-sections. It can be convenient to think that every nucleus possesses a “sphere of influence” extending beyond its geometrical dimensions and depending on the neutron’s energy. Having crossed this boundary the neutron interacts with nucleus. It should be noted that this merely is an intuitive and handy way of tackling the concept of nuclear interactions, because such processes are actually of quantum nature.
Let’s conduct a thought experiment which determines the probability that a neutron is absorbed within an infinitely thin (thickness of a single atom) foil of a certain substance, as shown below:
Figure 2. Effective cross-section distribution in 1 cm2 of monatomic layer.
Let be a surface density of nuclei per 1 cm2 of matter and let all neutrons be
monoenergetic, approaching the foil from the right angle. Then is the density of the beam, i.e. the number of neutrons hitting 1 cm2 of surface in 1 s. Let denote the density of neutrons not being absorbed by the plate. Hence, the number of neutrons absorbed is
. The frequency of the absorption equals to
. (1) On the one hand, with sufficiently large , we can define the probability of the absorption
of one neutron to be
. (2) Alternatively, we can write the probability in terms of an effective cross-section of the
hypothetical “sphere of influence” of a single atom and a surface density , as
. (3)
1 c
m
1 cm

9
Equating Eq. (2) and (3), we get [3]
(4)
The last expression is a way of defining the quantity , usually called microscopic cross-
section of absorption and is the characteristic to the given element, dependent on the energy of incoming neutron.
By the same analogy we define other quantities alike: – microscopic cross-section of scattering; – microscopic cross-section of fission;
– microscopic cross-section of capture; – microscopic total cross-section with .
2.3 Macroscopic cross-sections
In practical neutron problems it is usually of more convenience to use the following product , called macroscopic cross-section of absorption. Similar definitions apply to scattering, fission and other macroscopic cross-sections ( , , etc.),
where is the number of nuclei in 1 cm3, usually referred to as background density. Qualitatively, these quantities are the sums of all nuclei in a unit volume
If one considers a substance consisting of several types of nuclei, , the macroscopic cross-
section of type ( is defined as
where – is the number of nuclei of type in 1 cm3 of substance, and is microscopic
cross-section of the given process .
2.4 Neutron density
Neutron population in a reactor may be characterized by its neutron density, which describes the number of neutrons in an infinitesimal volume around a point of interest, at some time . That is
In reactor physics problems, the energy of the interacting neutron bares significant
importance for reaction outcomes. The energy of the incoming neutron determines the microscopic cross-sections of neutron interaction with nuclei. Thus we also define the energy dependent neutron density:

10
Obviously it holds that
.
Figure 3. Chaotic neutron movement with various velocities in a unit volume.
2.5 Reaction rate and neutron flux
It is convenient to introduce a quantity named reaction rate to describe the balance of neutrons in a medium, where they are being constantly involved in various types of nuclear reactions. It is important to note though that we suppose that the neutrons do not interact with each other. This assumption is supported by the fact, that the neutron density is far less than the density of nuclei. We define the reaction rate as
It can be derived [4] that the reaction rate is a function of neutron density, neutron speed,
and macroscopic cross-section of medium for a given reaction type :
. (5) It is customary to denote the quantity by and call it the neutron flux. Consequentially
we can rewrite the expression for reaction rate as
. (6)
As with neutron density, we can also define the energy-dependent reaction rate , which is done analogously.

11
2.6 Nuclear reactor and multiplication factor
A nuclear reactor is a system in which nuclear chain reactions are initiated, controlled, and sustained at a steady rate. The process behind the energy production is the nuclear fission – an inherently stochastic process, characterized by the microscopic fission cross-section. In particular, during the interaction of a sufficiently low-energy neutron with a 235U-atom, a possible outcome is a split of the uranium atom in two fission products and (as it was experimentally determined [4]) an emission of about 2.5 neutrons in average per fission event. This process is accompanied by liberation of about 200 MeV of energy in the form of kinetic energy of fission products (around 170 MeV), fission neutrons, instantaneous gamma rays, alphas, betas, neutrinos etc. It is worth noting, that, as it is seen in Figure 4, the average energy of fission neutrons is about 2 MeV - corresponding to fast neutrons, whilst it is customary to refer to neutrons of energies less than 0.1 eV as slow or thermal. Not all emitted neutrons cause further fission. The probability that a fast neutron emitted in a fission reaction will directly split another 235U atom is quite low as compared with thermal neutrons. The fission probabilities depend strongly on isotopic content and the energy of a neutron.
Reactor control system is designated to maintain the chain reaction at a desired steady state by means of keeping the ratio between the number of neutrons in one generation and the number of neutrons in the next generation in the reasonable range. This ratio is called the multiplication factor, , and is defined as:
If the ratio is a unity, then the reactor is said to be in a critical mode and the chain reaction
will proceed at a constant level. If the processes of capture and leakage of neutrons prevails over fission processes, it
eventually will lead to a subsequent attenuation of reactor. This is a subcritical mode of reactor. Finally, if the multiplication factor is greater than unity, successive generations will have
greater numbers of neutrons capable of fissioning and the process will continue in an avalanche-like manner, potentially leading to an overheating or even (under some circumstances) to a severe accident. This mode of operation is called supercritical.
It can be shown that the multiplication factor defined here on entirely physical grounds turns out to be an eigenvalue of a suitable equation, as discussed in the next chapter [5].

12
Figure 4. 235U thermal fission spectrum.
3 A brief description of diffusion approximation
3.1 General considerations
The knowledge of neutron density provides the necessary information for evaluation of the most important reactor properties. For example, we can evaluate the power of a nuclear reactor:
where is the average energy released in a single fission, and as was mentioned earlier, for 235U
it is roughly .
Unfortunately, it may be shown that there is no differential equation to which the neutron density, , is the solution. The way out is to introduce the angular neutron density, as
Obviously, integrating this quantity over a full solid angle, we get the energy-dependent
neutron density, . It can be shown that obeys an integro-differential

13
equation called the neutron transport equation, NTE, which is very difficult to solve both analytically and numerically [6].
3.2 One-group approximation
However, under some assumptions, it shows out, that the NTE simplifies to an energy-dependent diffusion equation, which is still too complicated to be presented here. It is more practical to treat neutron energy as a discreet quantity. Let us begin with a very rough, although illustrative assumption that all of the neutron are of the same energy, i.e. all of one speed. We can therefore refer all neutrons populating the reactor to a single group, hence the name one-group approximation. In this case it can be shown, that the NTE takes the form:
(7)
Written is this form, the equation is exact, but it includes two unknowns: the neutron
current and the neutron flux . In order to solve it, we must find a relation between and .
Such a relation was suggested by Adolf Fick in 1855 and it relates these quantities by postulating that neutrons leave regions of high concentration to regions of low concentration, with a magnitude that is proportional to the concentration gradient. Mathematically, it reads
(8)
Here is the diffusion coefficient, such that
[6]
This is called the Fick’s law, and is merely an approximation. In Eq. (7) and
are the macroscopic cross-sections of absorption and fission respectively; is the
mean number of neutrons per fission.
3.3 Multi-group approximation
In order to improve the accuracy of the one-group approximation, leaving the possibility of a simpler analysis, we break the neutron energy range into energy intervals and consider a multi-group model, as shown schematically below:
Figure 5. Energy groups.
E E0 E1 Eg-1 Eg EG-1 EG
Group g

14
It can be shown, that the corresponding multi-group diffusion equation in this case is
(9)
where the symbol means a specific energy group. is the total macroscopic cross-
section of all interactions resulting in neutron diminution from the current group (e.g.
scattering and absorption). is the macroscopic cross-section of scattering from group to . is the coefficient giving the fraction of neutrons producing into the group from
the total fission in the material. Finally, is the external flux from some other source of neutrons.
It is of common practice to specify the boundary conditions at the extrapolated surface vector , which differ from the true boundary vector by an amount not giving a significant error in final calculations [4]. Actually, the value of is usually defined as
. So we state .
Figure 6. Extrapolation of the outer surface.

15
3.4 Eigenvalue problem
Since our problem is static, we drop the time-dependence and the lack of any external neutron source gives us the following equation
(10) 8
Generally, such equation has no solution, thus we introduce an unknown constant ,
adjusting the equation to make it solvable. The problem now is to find both the fluxes and
the value of
(11) 9
which is nothing else but an eigenvalue problem, where eigenfunctions naturally can be determined to the precision of a scaling constant. In practical applications, such constants are defined by extra conditions inherent to the construction of the reactor, e.g. power generation capabilities. For a one-group model of a homogeneous fissioning medium the eigenvalue problem has the following form:
(12) 9
By introducing a quantity, called buckling, as
(13) 9
The Eq. (12) takes a simpler form:
(14) 9
While if the medium is a non-fissioning material, we get:
(15) 9
with the buckling defined as
(16) 9

16
4 Neutron distribution in a critical reactor
4.1 One-group bare reactor in slab geometry
Figure 7. Chaotic movement of neutrons (blue) among nuclei (green) in one-group approximation. Let us study the simplest case, where we assume all neutrons to be monoenergetic, the
medium is homogeneous and consider a slab reactor: infinite in y- and z-direction, and of a finite height M in the x-direction. The geometry is illustrated in the Figure 8, below.
Figure 8. Illustration of single zone infinite slab model. In this set-up the appropriate equation is (14), with the following boundary conditions (17)
17
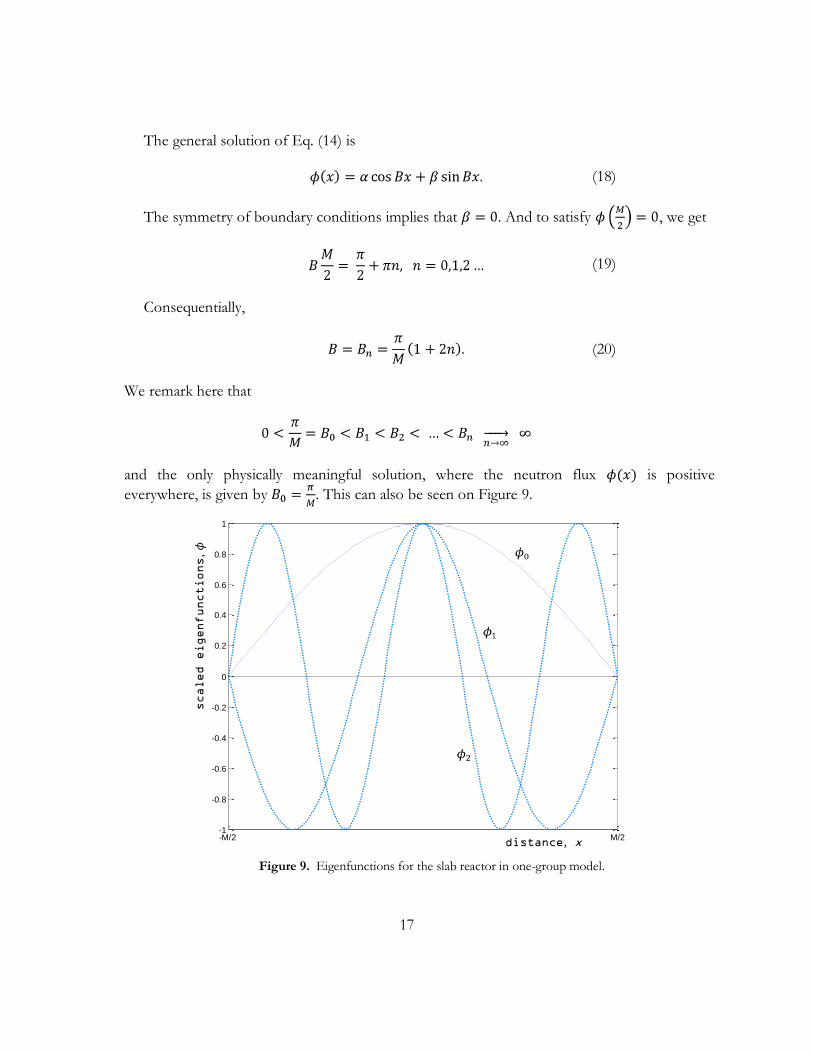
The general solution of Eq. (14) is (18)
The symmetry of boundary conditions implies that . And to satisfy , we get
(19)
Consequentially,
(20)
We remark here that
and the only physically meaningful solution, where the neutron flux is positive
everywhere, is given by . This can also be seen on Figure 9.
Figure 9. Eigenfunctions for the slab reactor in one-group model.
-M/2 M/2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
distance, x
scaled eigenfunctions,

18
Summing up, the solution is
(21)
where , and, consequentially, .
It should be noted for completeness, there are infinitely many mathematical solutions for :
4.2 One-group reflected reactor in slab geometry
Making things more realistic, we study the case when the core of a reactor is surrounded by a reflector shell. Reflectors are typically made of a non-fissioning material with a low absorption, e.g. graphite. Our set-up is as in Figure 10:
Figure 10. A reflected slab reactor geometry illustration.
We take benefit from the symmetry and thus consider only the region . Setting
up the equation for each zone we denote the core region with index C and leave index R for the reflector. The core zone has the similar equation as Eq. (14), while the reflector zone lack fissioning nuclides, , and thus has a form of Eq. (15). That is

19
(22)
(23)
where, by (13) and (16), we put and . These equations have the
following solutions
(24)
(25)
As for boundary conditions, the symmetry implies (26)
and for the outer boundary
(27)
The last two conditions refer to the surface between the core and the reflector. The flux and
the neutron current density must be continuous, thus requesting
(28)
(29)
For the sake of compactness, we introduce and . It is easily seen, that
condition (26) requires . From (27) we find that (30) Inserting (30) into (28), we get
(31)

20
Using (30) and (31) in (29) and re-arranging, we get
(32)
We finally arrive to a transcendent algebraic equation for the multiplication factor , putting
(33)
or by denoting the right-hand side of (33) by a constant
(34)
This transcendental equation has infinitely many solutions, with first three solutions
pictured in Figure 11 below:
-2 0 2 4 6 8
-6
-4
-2
0
2
4
6
Figure 11. Illustration of the solutions for Eq. (34).
x1=1.16 x2=3.76 x3=6.67
tan x
c/x
21
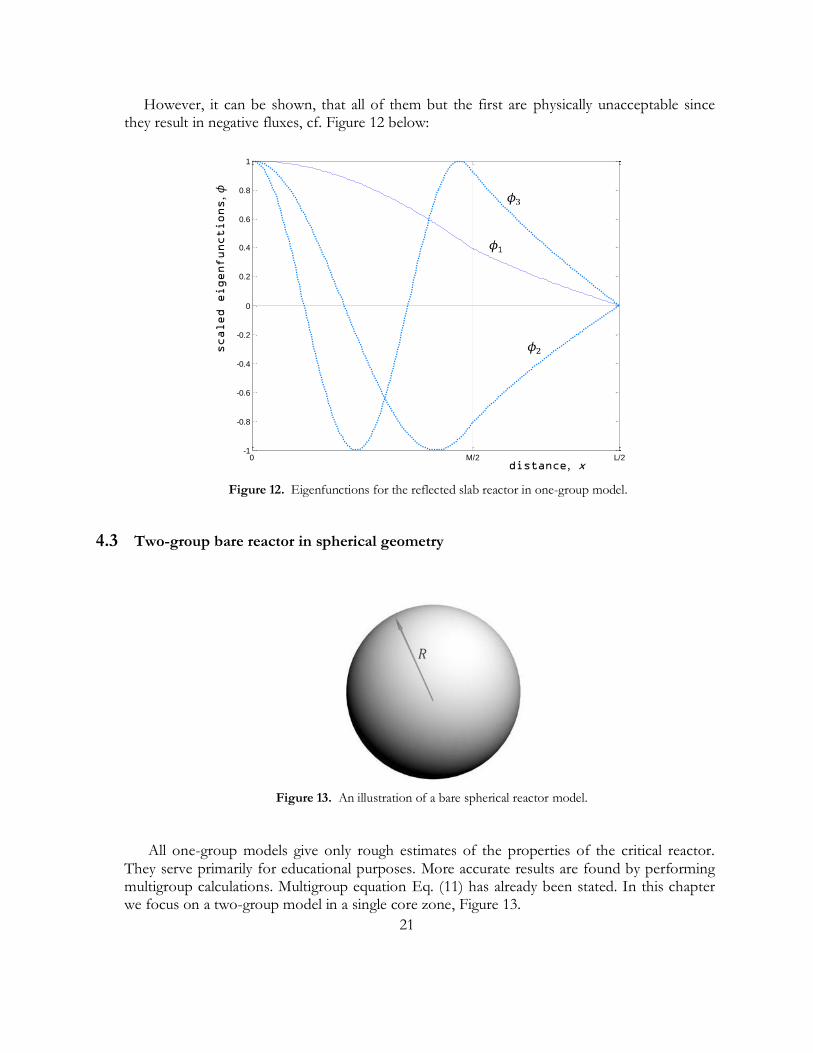
However, it can be shown, that all of them but the first are physically unacceptable since they result in negative fluxes, cf. Figure 12 below:
4.3 Two-group bare reactor in spherical geometry
Figure 13. An illustration of a bare spherical reactor model.
All one-group models give only rough estimates of the properties of the critical reactor.
They serve primarily for educational purposes. More accurate results are found by performing multigroup calculations. Multigroup equation Eq. (11) has already been stated. In this chapter we focus on a two-group model in a single core zone, Figure 13.
0 M/2 L/2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Figure 12. Eigenfunctions for the reflected slab reactor in one-group model.
distance, x
scaled eigenfunctions,

22
Figure 14. Two-group model: fast (red) and thermal (blue) neutrons among medium nuclei (green). First of all we divide the energy spectrum (illustrated in Figure 5) into two parts, and take
the group-average macroscopic cross-section to be already calculated and known. The average number of released neutrons in a single fission process in both groups is taken to equal each other, i.e. . Then the two-group equations are
(35)
At this point we suggest that the solutions for and are of a specific kind given by Eqs.
(36), (37), and (38) and will see whether such hypothesis is a true statement:
(36) (37) (38)
with boundary conditions . (39) By substituting Eq. (36), (37), and (38) into (35), denoting and we get
(40)
which has a non-trivial solution only when
(41)

23
Thus, we now have the following second-order equation in the general case for :
(42)
If we take to represent the group of fast neutrons, and leave for the group of thermal neutrons, we can make several statements about each of the group. In reality, almost all fissioned neutrons are fast (see Figure 4), i.e. we take , thus ;
fast neutrons are hardly absorbed ; and do not cause fission, thus
. Applying these assumptions to Eq. (42) we finally arrive to
(43)
Since functions and are determined up to a scaling factor, all we can do is to find the
ratio , which can be done from Eq. (40) above:
(44)
The fluxes of fast and thermal neutrons are then of the sinusoidal shape, depicted at the
following Figure 15.
Figure 15. Neutron fluxes for the bare spherical reactor in two-group model.
0 R0
0.2
0.4
0.6
0.8
1
radial distance, r
scaled neutron flux,

24
4.4 Two-group reflected reactor in spherical geometry
We are finally ready to tackle the so far most realistic and useful analytical model of a reactor. The neutron population in this case is described by two groups of diffusing neutrons (just as in the previous case), but now the reactor is coated with a reflector shell. The usefulness of such a model is that it is sufficiently simple both from an analytical and computational standpoint, allowing for rapid calculations. It appears that for many reactors, particularly large thermal reactors, this model gives acceptable first estimates of the important characteristics [7].
Figure 16. An illustration of a reflected spherical reactor model.
By the analogy with the previous calculations, we state diffusion equation for each group
and each region. For the sake of simplicity we assume right away, that the outer reflecting region of reactor is nonmultiplying; fast neutrons are not being absorbed; and all newly fissioned neutrons come from the fast group; cf. argumentation below Eq. (42). These assumptions made, we state the following equation for the core:
Fast group:
Thermal group:
However, just like it was mentioned in accordance to the introduction of Eq. (11), that it is
mostly unlikely that the set of equations above have a solution. Thus, introducing the constant we are to adjust the equations in such a way as to make it solvable.
Fast group:
(45)
Thermal group:

25
Now, we are searching both for the neutron fluxes and the unknown factor , obtaining
once again the eigenvalue problem. The quantity is the scattering cross-section from fast to
thermal group, which is also the source of thermal neutrons; is the absorption cross-section for the latter.
Fluxes in the reflector region are described by the following set of equations:
Fast group:
(46)
Thermal group:
Just as before, the is the scattering cross-section from fast group to thermal, but this
time for the reflector. As it was mentioned, the reflector is a nonmultiplying material, resulting in zero neutrons source.
Let us first consider the core equations. Guided by our previous results, we suggest, that the sought fluxes are the linear combinations of some other functions, of the form:
(47)
The functions and are defined to be the solutions of the equations
(48)
Where and are to be chosen so that the expressions (47) for and are acceptable solutions of Eqs. (45). By substituting Eqs. (47) into (45) and applying (48) we get the following results:
(49) = 0
= 0
Since and are independent, and generally , it follows that the equations above are satisfied only if each coefficient by and functions is identically zero. We get the set of equations:
(50)

26
(51)
(52)
(53)
Substituting (51) in (50), and (53) in (52), we get the quadratic equation:
(54)
Thus and are solutions to the equation
(55)
where we have defined
(56)
The last expression is denoted as because it merely represents a multiplication factor of
an infinite medium. If expressions (47) are the solutions of the core equations (45), with and given by (48), the quantities and are to be taken as the roots of Eq. (55):
(57)
Since the primary interest of this equation is in the application to reactors, it is obvious that
. In this case
(58)
If we introduce and as positive and real, the solutions to our quadratic equation are
(59)

27
With these quantities Eqs. (48) take the form
(60)
These equations have well-known solutions and, for the sake of brevity, we skip the
derivation details and state them for a case of spherical geometry:
(61)
Note, that both and do actually depend on through and . Now, if we define the
new quantities and as follows
(62)
Then (47) may be written
(63)
This set of equations is basically the general solution of neutron flux distribution in the core
region of reactor. We move on and investigate the equations for the reflector. We start by
introducing the quantities and
(64)
Which allows us to rewrite Eqs. (46) as
(65)

28
The solutions to Eqs. (65) are to vanish at the extrapolated outer surface of the reflector.
We denote that extrapolated surface with , then
(66)
By analogy with the solutions for the core region, we look for solutions to Eqs. (65) in a
form of a linear combination of some functions and , when they satisfy the equations
(67)
(68)
As it was already found for the case of one-group model, the form of solution can be given in terms of a single function
(69)
where is an undetermined constant. The form of is more general:
(70)
If we substitute these relations into (65), we get the following requirement
(71) with
Finally, we get the reflector fluxes of the form
(72)
where by the geometrical and boundary requirements for a sphere
(73)
The solution (63) and (72), coupled by (61) and (73) respectively, both give us the
distribution of fast and thermal fluxes in the core and in the reflector region. The only constants still undetermined are and . These are to be computed from the conditions at the core-reflector interface, which are still to be applied. The conditions at the

29
zones’ interface were already discussed in Chap. 4.2, Eqs. (28) and (29). The flux and the neutron current density must equal in the points of interface. Denoting the core-reflector interface surface by , the interface statements are
(74)
The application of these conditions to the general solutions (63) and (72) yields the
following set of equations in the four unknowns and .
(75)
The symbols and denote here the functions and their derivatives
evaluated at . Then, Eq. (75) rewritten in a matrix form is
(75a)
The Eqs. (75) must all be satisfied simultaneously, thus the only nontrivial solution of this
system of equations is when the determinant of the coefficients and vanish completely. That is
(76)
This expression may be regarded as the criticality condition for the reflected reactor in the
two-group approximation, since it involves both the group constants and the dimensions of the reactor. In the usual way, the specification of the fuel concentration or the core size allows the determination of the other through the use of the above relation.
4.5 Sample calculations in two-group reflected reactor
For illustration purposes of a two-group model in reactor calculations we consider a reflected spherical reactor. We calculate the multiplication factor of the given configuration and adjust the fuel concentration so as to meet the criticality condition (76). To begin with, let’s
30
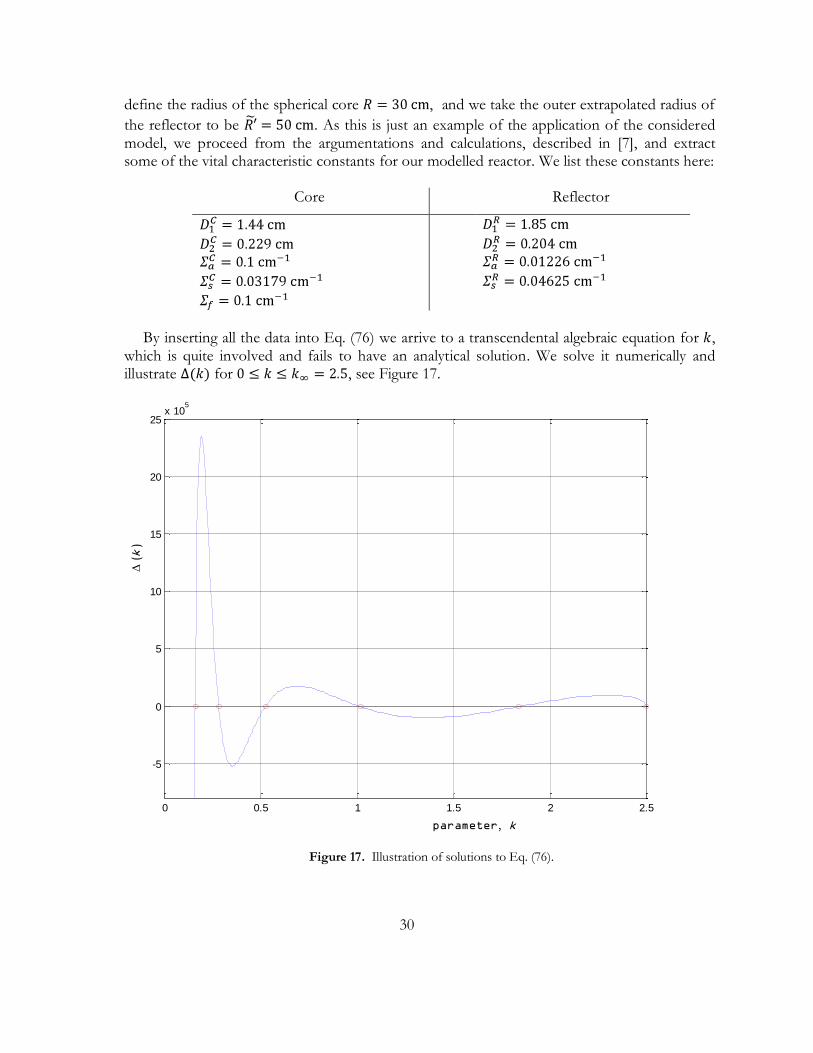
define the radius of the spherical core , and we take the outer extrapolated radius of
the reflector to be . As this is just an example of the application of the considered model, we proceed from the argumentations and calculations, described in [7], and extract some of the vital characteristic constants for our modelled reactor. We list these constants here:
Core Reflector
By inserting all the data into Eq. (76) we arrive to a transcendental algebraic equation for ,
which is quite involved and fails to have an analytical solution. We solve it numerically and illustrate for , see Figure 17.
Figure 17. Illustration of solutions to Eq. (76).
0 0.5 1 1.5 2 2.5
-5
0
5
10
15
20
25x 10
5
parameter, k
∆ (k
)

31
We see that, just as in the previous cases, there is a number of possible solutions. By
analogy, we can argue that there is only one physically accepted value of , which does not lead to negative fluxes. The other way around, which we take here, is to narrow down the region, where is allowed to be. The upper limit is – the multiplication factor of a finite medium cannot be greater than that of infinite medium. The lower limit we can get from the case when the reflector is absent, which is already studied in Chap. 4.3. The multiplication factor for that case, is given by Eq. (43) and with we get . So, by these reasonings, we have reduced the scope of possible -values to . That region does hold only one root, and the numerical calculations yields
We remark here that the found value is the maximal root of the equation,
, on the physically permitted region .
The found value of may be interpreted in the following equivalent ways:
The principal eigenvalue of the system;
The multiplication factor of the system;
The factor by which the fission cross-section must be reduced in order to sustain a steady chain reaction in the reactor.
A thought way of implementing the last statement is to reduce the concentration of nuclear
fuel and keep the absorption cross-section constant (e.g. using a substance with similar absorption characteristics as solvent). To get some numerical values of the flux-functions and visualize the results, we must still determine the constants and in Eqs. (63) and (72). The set of Eqs. (76) consists of four simultaneous algebraic equations in the four unknown constants. Since these equations are homogeneous, it is not possible to obtain explicit expressions for all four quantities, and, as in all steady-state reactor problems, there will remain one undetermined constant. Thus three of the unknowns will be determined in terms of the fourth.
By doing a simple linear manipulations on Eq. (75), we express the constants in terms of :
32
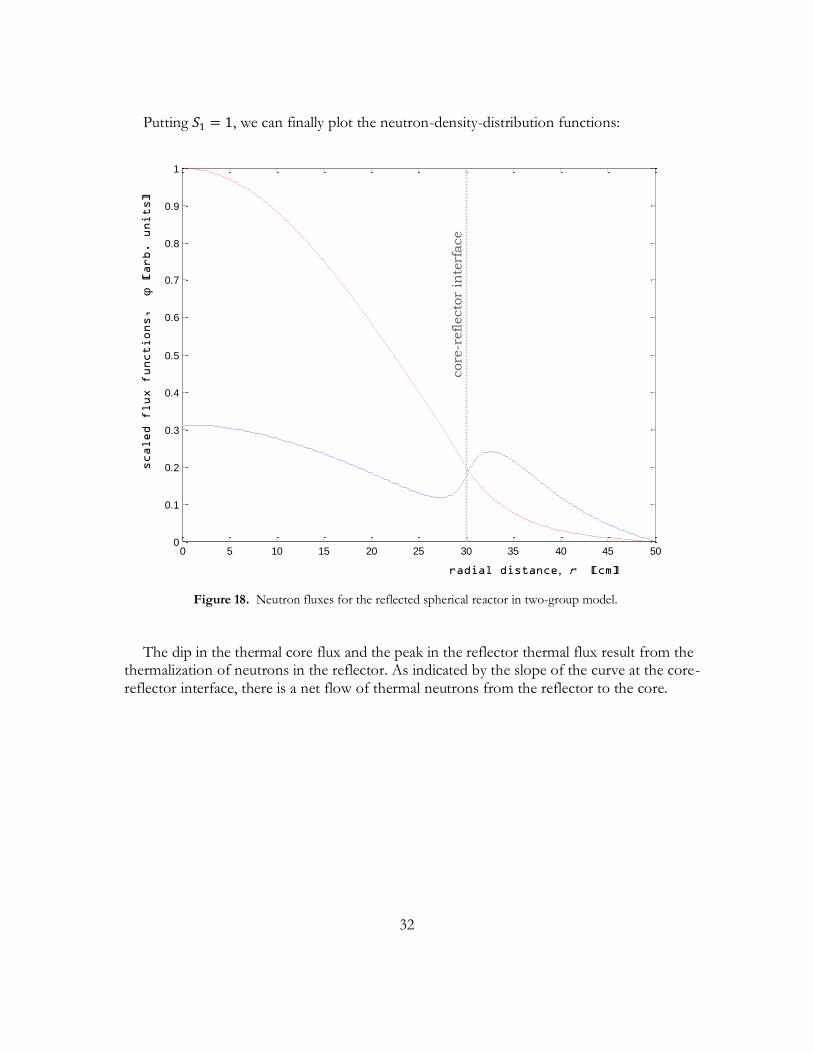
Putting , we can finally plot the neutron-density-distribution functions:
Figure 18. Neutron fluxes for the reflected spherical reactor in two-group model. The dip in the thermal core flux and the peak in the reflector thermal flux result from the
thermalization of neutrons in the reflector. As indicated by the slope of the curve at the core-reflector interface, there is a net flow of thermal neutrons from the reflector to the core.
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
radial distance, r [cm]
scaled flux functions, φ [arb. units]
core
-reflecto
r in
terf
ace

33
5 Discussion
The general approach used in the case of the one-group model is rather easily extended for use with the two-group method. The consideration of the two-group model with reflector coating discloses the fact of the thermal splash of neutron flux in the reflector, which otherwise could not be seen with one-group model. Besides that, the introduction of a reflecting layer enables the so called reflector savings – reduction of reactor dimensions as well as its critical mass – where the investigation of neutron population allows estimating of these values.
The two-group model calculation of the reflected spherical reactor was the bottom-line of this thesis. Although, the spherical approxi-mation may not always be the best geometry to choose; in some cases, the technique and generality of discussed approach allows one easily to adjust the methods to other geometries as well. For example, by choosing suitable and
functions we could also treat a finite slab reflected reactor or a finite cylindrical reactor either with radial reflected coating or with a top-bottom reflector (pictured in Figure 19). The formulation of this method eliminates a large portion of the computational labour, making it a useful tool in preliminary studies and some practical applications.
6 Summary and Conclusions
The practical worth or applicability of the approaches discussed in this thesis should not be underestimated. To begin with, the methods are relatively simple in computation and permit to be made rapidly. Moreover, the sufficient simplicity of the two-group reflected model allows one to trace rather easily the various factors which influence the physical features of the system as predicted by the model. For many reactors, particularly large thermal reactors, this method gives acceptable first estimates of the important characteristics. Although, the two-group model does not generally give an adequate grade of precision in reactor characteristics of fast reactors, it can be easily extended to three and more groups [4]. The extension by a group or two usually suffices even for fast reactors. Finally, the easiness of carried out calculations makes this model to be a perfect starting-point in possible students’ studies or projects in nuclear reactor investigations and/or in related fields.
Figure 19. Other possible two-group models of reactor.

34
Bibliography
[1] “BP: Statistical review of world energy June 2006". British Petroleum (June 2006). [2] European Nuclear Society: http://www.euronuclear.org/info/encyclopedia/n/nuclear-power-
plant-world-wide.htm (May 2010). [3] V. V. Smelov, Lectures on neutron transport theory, Atomizdat (1978). [4] J. R. Lamarsh, A. J. Baratta, Introduction to Nuclear Engineering, 3rd ed., Prentice-Hall (2001). [5] J. J. Duderstadt, L. J. Hamilton, Nuclear Reactor Analysis, John Wiley & Sons (1976). [6] G. I. Bell, S. Glasstone, Nuclear Reactor Theory, VNR (1970). [7] R. V. Meghreblian, D. K. Holmes, Reactor Analysis, McGraw Hill (1960).