Embed Size (px)
Citation preview

www.tjprc.org SCOPUS Indexed Journal [email protected]
ANALYTICAL AND COMPUTATIONAL MODELLING OF GO-KART
POWERTRAINS
HITESH KUMAR*, KUNAL MATHUR & ADITYA NATU
Department of Mechanical Engineering, Delhi Technological University, Delhi, India
ABSTRACT
In this study, we have a unique methodology of developing two types of transmission systems for a go-kart with known
specifications depicted and compared later on. The two different forms of transmission systems are viz. manual
transmission (with a fixed gearbox) and semi-automatic transmission (with a belt and pulley based CVT or Continuous
Variable Transmission). These designs were later validated by fatigue analysis using CAE (Computer Aided Engineering).
The detailed methodology also describes how the two systems have been compared on the basis of their performance on
the Go-kart in terms of acceleration (using analytical and computational approaches), intensity of the design-calculation
process and several other theoretical factors. The analytical approach computes the time taken by the go-kart (with both
the transmissions individually) to accelerate to its top speed using simultaneous differential equations that incorporate
rolling resistance. Computational approach achieves the same purpose by physical modelling of the entire go-kart
powertrain using MATLAB Simscape that solves complex dynamic equations while considering multiple derating factors.
The correlation between the analytical and computational results of a particular driveline is used to validate the
simulations performed and the assumptions made.
KEYWORDS: Powertrain, Go-kart; CVT, Simulink; Ansys & MATLAB
Received: Jun 08, 2020; Accepted: Jun 29, 2020; Published: Sep 30, 2020; Paper Id.: IJMPERDJUN20201463
1. INTRODUCTION
Go-karts are self-propelled, low ground clearance vehicles without a differential and suspension system. Go-karts
are widely used these days for recreational or racing purposes. Nowadays there are a lot of student teams in India as
well as abroad that design and fabricate racing Go-karts to compete in national/international level competitions. As
far as the transmission system is concerned, the students are given a choice of either proceeding with a completely
manual transmission or a CVT based transmission system. This study hence lays out a methodology of developing
and comparison of the two most popular transmission systems and compares them on a wide range of parameters
for a given Go-kart. With this design and comparison methodology, student teams can easily see which type of
transmission system will benefit their Go-kart designs, hence enabling them to take such major decisions in a proper
and a justifiable way.
A racing Go-kart was designed and manufactured in [1] by us and this study uses a lot of our experience
gained during the same. The methodology of development and comparison of both the drivelines (manual and semi-
automatic) on a particular Go-kart has been demonstrated by using the Go-kart in [1] as an example. Using the
vehicle parameters as given values, the designs of most of the powertrain components were made using machine
design equations, CAD modelling in SolidWorks, Siemens UGNX-11.0 and improving the designs by pushing them
through fatigue analysis performed using modern CAE tools like Ansys Workbench. Other powertrain components
Orig
ina
l Article
International Journal of Mechanical and Production
Engineering Research and Development (IJMPERD)
ISSN(P): 2249-6890; ISSN(E): 2249-8001
Vol. 10, Issue 3, Jun 2020, 15343-15370
© TJPRC Pvt. Ltd.
15344 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
were selected according to the vehicle requirements and available market standards. The design objectives of the
powertrain components of both the systems were kept the same for the sake of comparison. While comparing the
performance of the two systems on the basis of vehicle performance i.e. acceleration, two techniques for achieving the
same were devised. The first method was the analytical method that involved the solving of simultaneous differential
equations for calculating the time required for the vehicle to reach its top speed from rest using both the powertrain
systems individually in MATLAB Simulink 2018. The second method was the computational method in which the entire
physical models of both the transmission systems were developed in MATLAB Simscape. The models tend to simulate the
actual powertrain systems with a sufficient degree of accuracy and involve much more parameters than in the analytical
methods. The correlation between the results of both the methods suggested the validity of the simulation approach and
assumptions throughout the study. Finally the difference between the two transmission systems were summarized including
a bunch of theoretical parameters as well.
In [1], a racing Go-kart using a chain sprocket in the fixed gearbox (manual) transmission was designed, analyzed
and manufactured. In [2], another racing Go-kart has been manufactured using a CVT instead of a manual transmission. As
per [2], with the help of a CVT, constant step-less acceleration from start to high speed eliminates shift shock, gives better
fuel economy and less emissions. The authors of [3] have used a CVT as well as a chain drive, deploying the advantages of
the semi-automatic transmission system as in [2]. Chain drive is used because it is capable of taking shock loads and CVT
would provide automatic speed ratio change. The authors of [4] have implemented a chain drive instead of a CVT. For this
system, chain drive type transmission is most preferable as it is easy to install, simple in design and cost effective [4]. The
authors of [6] have discussed the differences between the performance of a manual transmission versus that of an
automatic transmission using a CVT in terms of vehicle velocity and gear shift shocks. Hence a comparison study of both
the transmission systems is shown by them.
[1], [2], [3] and [4] have not analysed the effect of the different transmission systems on their vehicle performance
before proceeding with their actual drivelines. Thereby alternate methods of transmission were not discussed and tested in
detail, whereas in this paper we are comparing whether the go-kart performance will be better in case of a CVT or manual
driveline. Authors of [8] have not compared the two transmission systems in terms of actual numerical vehicle parameters
such as acceleration, power delivered and respective weights, which we have managed to incorporate in our study. We
have also modelled the rolling resistance as a function of tire pressure and as a parabolic function of the Go-kart speed
while computing the acceleration in both the cases. This enabled us to perform continuous solving of the acceleration
functions using MATLAB Simulink to obtain accurate results. The authors of [7] have done a comparison study between a
manual transmission and a CVT based transmission in terms of acceleration; however they have not included the time
taken for gear shifting in case of manual transmission and have neglected rolling resistance as well, which we have
successfully worked upon. Moreover we have modelled the slip between the tire and the ground using standard referenced
values, which has not been pressed upon by the above papers that were studied for literature review. [6] and [7] did not
support their comparison study with precise physical modelling that we have done using MATLAB Simscape, which
includes various dynamic parameters that help simulate the entire powertrain systems. These papers also did not focus on
the different design challenges involved while incorporating either one of the powertrain systems, which we have managed
to complete using market selection, CAD modelling and fatigue analysis for both the systems respectively.
2. METHODOLOGY DEPICTION
Analytical and Computational Modelling of Go-Kart Powertrains 15345
www.tjprc.org SCOPUS Indexed Journal [email protected]
This section depicts the entire methodology for designing, simulating and comparing the two transmission cases.
2.1. Selection Of Common Parameters for both the Powertrain Systems
The manual transmission with the fixed gearbox case was designed, manufactured and physically implemented by us in
[1], but slight changes would be made in the designs for the sake of using the same mathematical design equations. For the
second case, a CVT compatible engine is selected from the market on the basis of availability, cost and similarity of
technical specifications with the Honda Stunner engine used in [1]. The following are the general parameters that will stay
common for both the drivelines.
Table 1: List of Parameters that are Common for both the Drivelines
S. No. Symbol Description Values
1 m Mass of the go-kart 160kg
2 v Maximum go-kart speed (design target) 90kmph
3 wf Fraction of static weight towards the front of the vehicle 0.37
4 wr Fraction of static weight towards the rear of the vehicle 0.63
5 rg Radius of the go-kart wheel 0.1397m
6 g Acceleration due to gravity 9.8m/s2
7 S Slip ratio 1.25
8 d Deceleration of the vehicle 0.7g
9 Lwb Wheelbase of the go-kart 1.1m
10 hcg Height of the centre of gravity of the vehicle 0.1504m
11 Tb Braking torque by the braking system 153.58Nm
12 td Stopping time of the vehicle from 70kmph 3 seconds
13 μ Coefficient of friction between road and tyres 0.85 (asphalt)
14 ωemax1 Maximum engine speed 10000rpm
15 ωp1 Engine speed at maximum power 8000rpm
16 Te1 Maximum engine torque 11Nm
17 ωt1 Engine speed at maximum torque 6250rpm
18 Pr1 Primary reduction ratio 3.35
19 Gi ith gear ratio(i=1,2,3,4 or 5) Variable
Instead of aiming to design the vehicle for 70kmph as in [1], our aim would be as high as 90kmph because of
unpredictable friction losses in the engine as well as in the driveline components. This intuition is based on our experience
of manufacturing and designing go-karts. There should be a sufficient slip between the rear wheels and the ground to
provide better drive control as stated in [15]. Hence the slip percentage was chosen to be 20% (0.2) for dry asphalt at
μ=0.85 (shown in figure 3 of [15]). This implies that the ratio of the translation velocity of the rear wheels to that of the
vehicle would be equal to 1.25.
Hence S = 1.25. This value would be used throughout the study for both the transmission cases. Figure 3 of [15]
shows the sweet spot range within which the slip percentage must be kept as the slip dynamics is swift and at any value
after the peak of the friction curve is an open loop unstable [15].
2.2. Manual Transmission Case
This section would discuss the entire development and modelling using analytical and computational techniques of the
powertrain system of the manual transmission go-kart so that it can be compared with its semi-automatic counterpart in the
later sections.

15346 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
2.2.1. Engine selection
Honda Stunner CBF engine was selected. The selection of the engine has been done in [1] on the basis of various
parameters like engine cost, power, torque, dimensions and orientation. In Table 1, the following are the engine and
gearbox parameters for this case and hence have been assigned the subscript 1.
2.2.2 Sprocket Calculations
The sprocket ratio of the go-kart in the fixed gearbox (manual transmission) case must be computed as:
Sr1 = (1)
v = 90kmph
G5: 5th gear ratio = 1.038 [1]
Hence Sr1 = 1.35. It is also ensured that the driven sprocket (larger one) will have sufficient clearance from the
ground, since [1] has used a much higher sprocket ratio for the same diameter of the rear axle. Moreover the generation of
a suitable amount of torque to lift the vehicle has also been ensured in [1].
2.2.3 Rear Axle Designing
Rear axle of the go-kart drives the rear wheels to propel the go-kart forward. It receives power from the sprocket and
transfers it to the rear wheels. Material of the rear axle was chosen to be AISI-1020 owing to its high tensile strength, easy
availability and low price. According to the space available in the chassis, availability of certain diameters in the market
and availability of plummer block sizes, the following specifications of the rear axle decided upon, L: length is 880mm [1],
Do1: outer diameter is 35mm ,Di1: inner diameter is 28mm,
K is the ratio of inner diameter to outer diameter is 0.8, B1*H1 is dimension of keys is 4mm x 4mm (validated
later), Te1 is Maximum engine torque is 11Nm (Table 2),Syt : Tensile yield strength of AISI-1020 is 294.74 MPa [12],
Estimated mass of the driven sprocket with its keys, hub, casing and fasteners is 4kg, Estimated mass of the brake disc with
its hub, keys, and fasteners is 3kg, The mass of the brake disc and driven sprocket has been taken as to model for the nearly
twice as usual to model for the worst case scenario. The rear axle would be designed against both the dynamic loads during
acceleration and braking of the go-kart.
(i)CASE-A1: Kart acceleration
MtA1: Maximum turning moment/torque on the rear axle during acceleration (provided by the sprocket)
MtA1=Te1*Pr1*G1*Sr1=11*3.35*3.076*1.35= 153Nm (2)
The dynamic weight of vehicle on the rear axle is computed as follows:
WrA = [19] (3)
WrA is a dynamic weight of the vehicle on the rear axle during acceleration. Where ‘a’ is the acceleration of the
vehicle which has been taken to be equal to the rate at which the vehicle reaches its top 1st gear speed. (calculation shown
in the analytical computation section). Values and meanings of the rest of the parameters are in Table 1.
Analytical and Computational Modelling of Go-Kart Powertrains 15347
www.tjprc.org SCOPUS Indexed Journal [email protected]
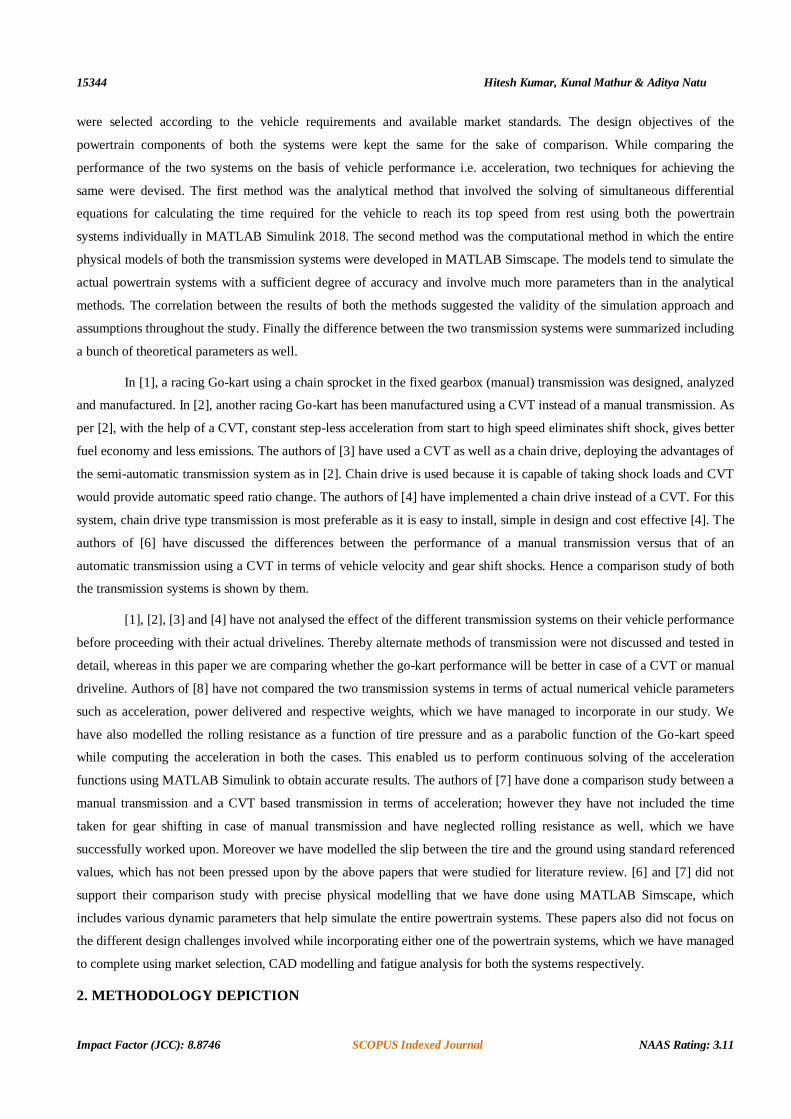
WrA is calculated as 1072.5N. This load WrA has been divided equally between the two rear wheels attached to the
rear axle.
Figure 1: Loading and Bending Moment Diagram of the Manual Transmission Rear Axle During Acceleration
In the above figure, the loading and the bending moment diagram of the rear axle is shown. The bearing and
plummer block reactions are computed as follows using moment balancing is Ra = 569.23N, Rb = 572.124N. Hence the
maximum bending moment MbA1 in the rear axle during acceleration is calculated as 67.032Nm.
Using the following bending stress equation [13], the selected dimensions of the shaft are checked for strength.
σbA1 = [15](4)
σbA1 is calculated as 48MPa. Since this value is much less than the yield strength (Syt) of the material, the rear axle
will not fail.
(ii)CASE-B1: Kart Deceleration
MtB1 is Maximum turning moment/torque on the rear axle during braking (provided by the brake disc). MtB1=Tb =
153.58Nm (Table 1). This would hence be the braking torque provided by the braking system of the go-kart, that acts in the
direction opposite to that of forward wheel motion. The dynamic weight shift on the rear axle during this deceleration from
a speed of 70kmph to rest would be computed as follows [21]:
WrB = [19](5)
WrB: Dynamic weight of the vehicle on the rear axle during braking/deceleration.
The parameters WrB and WrA have not been assigned the subscript 1 or 2 since both remain the same for manual
and CVT based transmission systems. WrB came out to be: 418.9N. The value of the above parameters has been mentioned
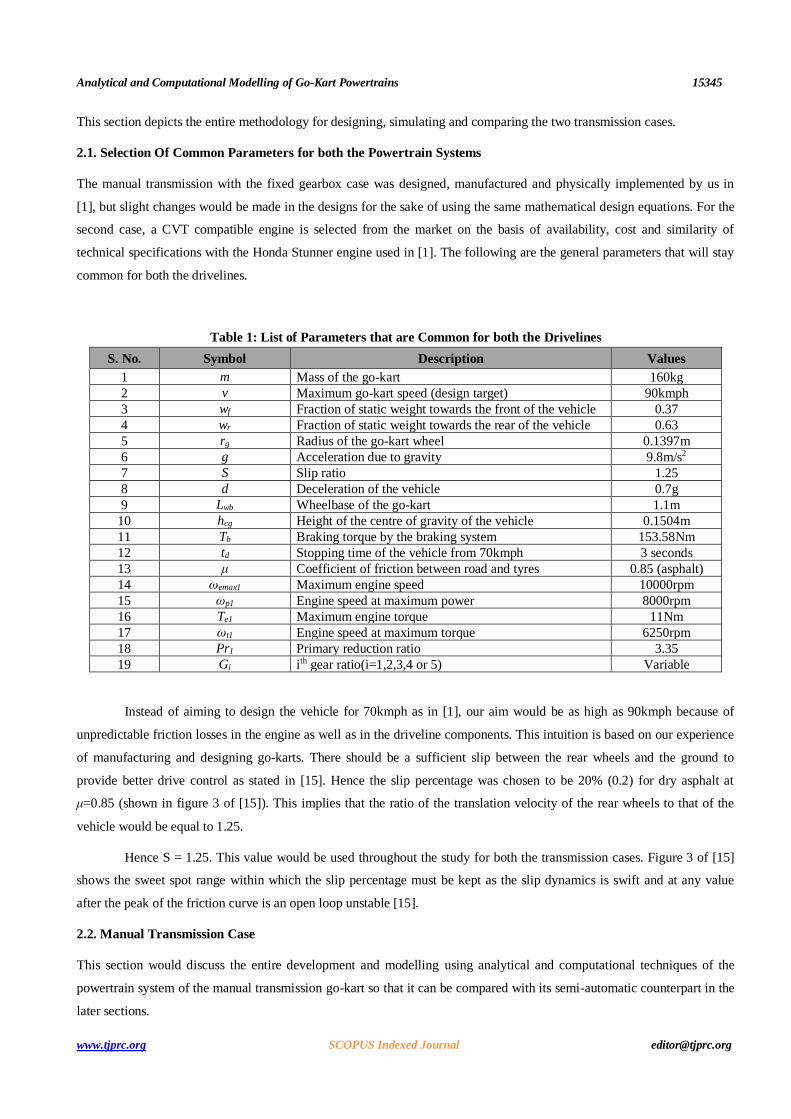
in Table 1. The load WrB would get equally divided amongst the two rear wheels of the vehicle.
Figure 2: Loading and Bending Moment Diagram of the Manual Transmission rear axle During Braking
The above loaded bending moment diagram of the rear axle during braking shows the position of the maximum bending
moment. Using the law of moments, the bearing reactions are computed to be Ra = 451.93N, Rb = 454.72N. Therefore the

15348 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
maximum bending moment on the rear axle during braking is calculated to be MbB1 = 52.46Nm. Using the following
bending stress equation [13], it would be decided whether the selected dimensions of the rear axle will undergo failure or
not.
σbB1 = [13] (6)
σbB1= 43.23MPa
Since this value is much below the yield strength of the material, the rear given rear axle will not fail under the
braking load conditions. Hence it can be concluded that the selected dimensions of the rear axle would sustain the given
loads.
2.2.4. Final Design of the Rear Axle
Since σbA1 > σbB1, we shall consider the acceleration case for computing the factor of safety of the design and during fatigue
analysis since it provides a higher bending stress on the rear axle.
FOS = Syt /σbA1 (7)
The factor of safety (FOS) of this shaft comes out to be 6.2, indicating that the final selected dimensions of the
shaft are safe from failure. Now the same value of FOS and K (ratio of inner to outer diameter) will be used for the rear
axle in Case-2 (CVT based driveline case), for the sake of proper comparison. The following CAD model of the manual
transmission case rear axle is developed along with proper keyways in NX-11.
Figure 3: CAD Model of the Manual Transmission Rear Axle Generated in NX-11
2.2.5. Validation by Fatigue Analysis using CAE
CAE using Ansys Workbench is performed on the rear axle to carry out fatigue analysis. Fatigue analysis was carried out
by varying the torque on the shaft in a sinusoidal manner, whereas the weights of the mounted components and that of the
vehicle load were made constant. The loads during vehicle acceleration were taken into account for fatigue calculations
since they generate a much higher bending stress on the rear axle. The aim of the analysis was to ensure that the design
would not fail under the given fatigue loading (i.e. FOS does not fall below 1.0). The moment on the rear axle would vary
in a sinusoidal manner as:
Te1*G1*Pr1*Sr1 – Te1*G5*Pr1*Sr1
Half cycle time would be the time taken for the moment to reach its minimum value from its maximum value, i.e.
time taken for the vehicle to accelerate from rest till maximum speed (90kmph). This is calculated in the subsequent
sections as slightly below 19 seconds. The following details were entered in the software, Moment: 153 – 51.64Nm
(Sinusoidal cycle), Half cycle time: 19 seconds. Additional vertical weights of mounted components and vehicle load WrA
are applied (as in the above loading and bending moment diagram of the acceleration case).Constraints: Cylindrical
Analytical and Computational Modelling of Go-Kart Powertrains 15349
www.tjprc.org SCOPUS Indexed Journal [email protected]
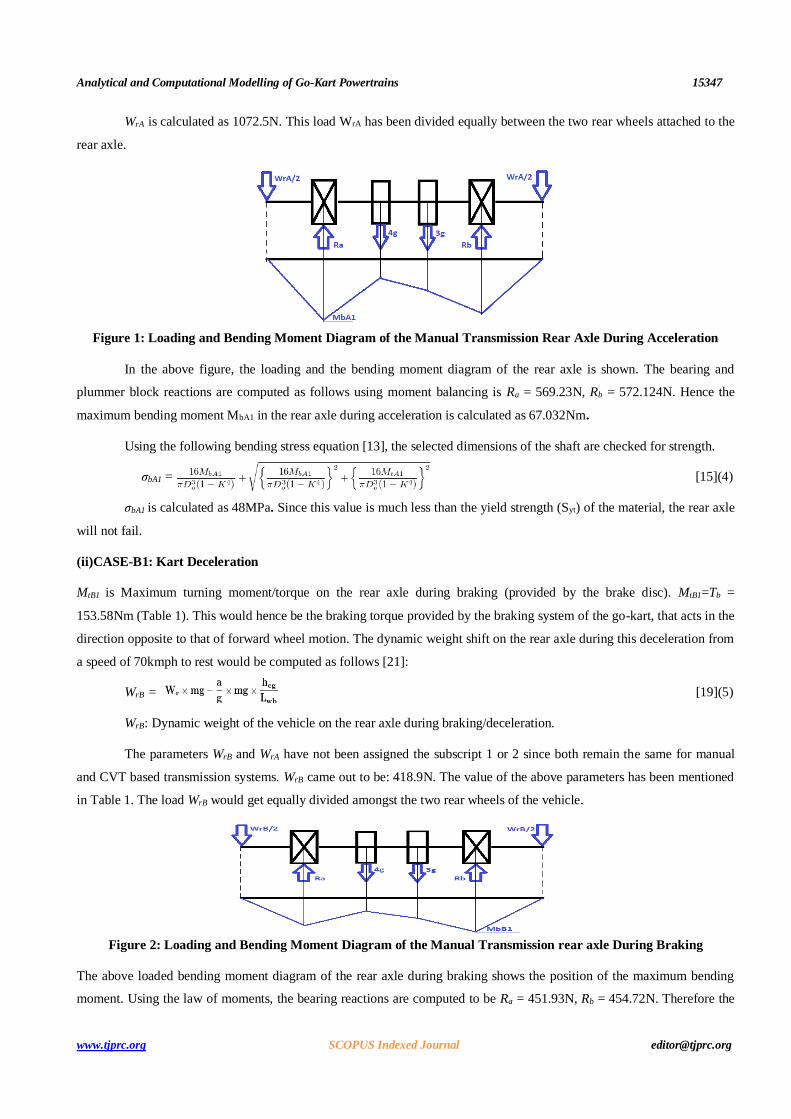
supports at both the bearing points of the rear axle to simulate actual bearings. This technique was also applied in [21].
Figure 4: Factor of Safety Results of the Manual Transmission Rear Axle in Ansys Workbench
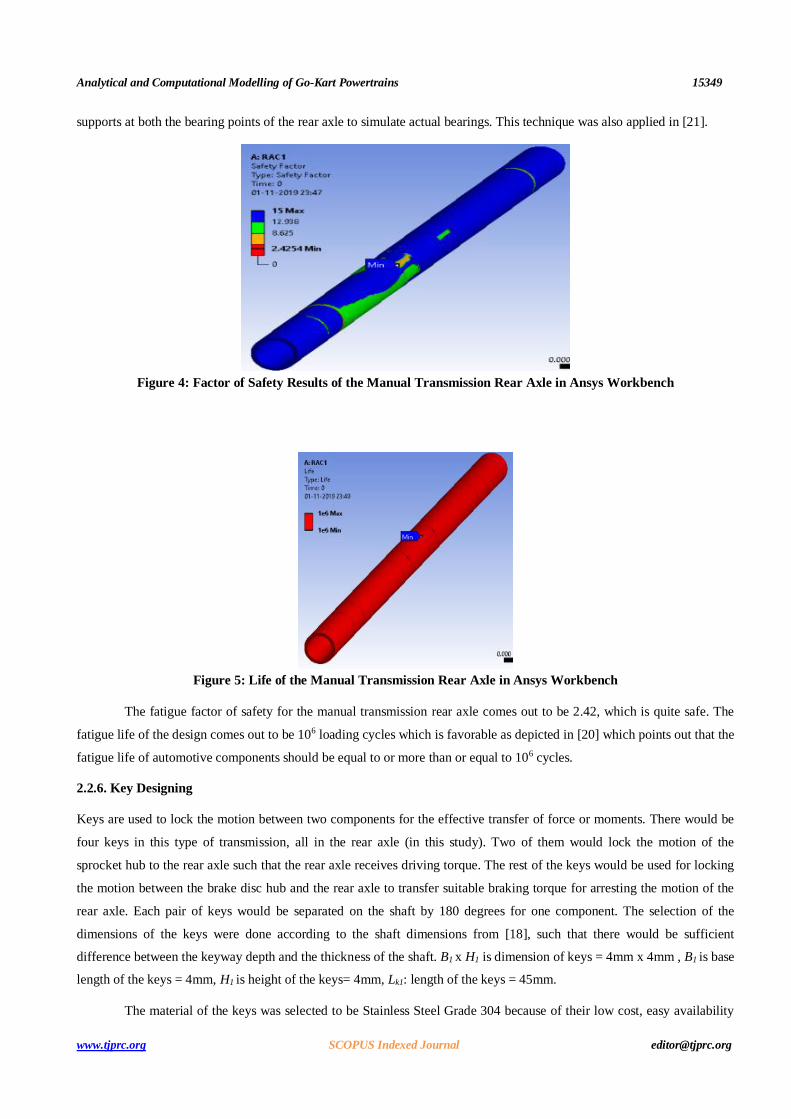
Figure 5: Life of the Manual Transmission Rear Axle in Ansys Workbench
The fatigue factor of safety for the manual transmission rear axle comes out to be 2.42, which is quite safe. The
fatigue life of the design comes out to be 106 loading cycles which is favorable as depicted in [20] which points out that the
fatigue life of automotive components should be equal to or more than or equal to 106 cycles.
2.2.6. Key Designing
Keys are used to lock the motion between two components for the effective transfer of force or moments. There would be
four keys in this type of transmission, all in the rear axle (in this study). Two of them would lock the motion of the
sprocket hub to the rear axle such that the rear axle receives driving torque. The rest of the keys would be used for locking
the motion between the brake disc hub and the rear axle to transfer suitable braking torque for arresting the motion of the
rear axle. Each pair of keys would be separated on the shaft by 180 degrees for one component. The selection of the
dimensions of the keys were done according to the shaft dimensions from [18], such that there would be sufficient
difference between the keyway depth and the thickness of the shaft. B1 x H1 is dimension of keys = 4mm x 4mm , B1 is base
length of the keys = 4mm, H1 is height of the keys= 4mm, Lk1: length of the keys = 45mm.
The material of the keys was selected to be Stainless Steel Grade 304 because of their low cost, easy availability
15350 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
in the form of keys and high shear strength. Sssyt is Yield strength of stainless steel which is 205MPa [14]. Hence yield
shear strength is Sssyt*0.577 = 118.3MPa and compressive yield strength = Sssyt*1.5 = 307.5MPa. These dimensions were
confirmed by the following equations [13], used to check the compressive (σc) and shear strength (τ) of the keys according
to the loading conditions.
τ = [13] (8)
σc = [13] (9)
The above equations use the maximum moment that the keys would be subjected to, which happens to be the
braking torque (Tb) applied at the keys placed at the brake disc hub. τ = 48.8MPa and σc = 97.5MPa. By comparing these
values with the shear and compressive limits of the material mentioned above, the keys with the selected dimensions are
safe from failure.The following figure shows the CAD model of the key with necessary fillets having radius equal to
0.16mm [20].
Figure 6: CAD Model of the Manual Transmission Rear Axle Key in SolidWorks 2018
(i)Analytical Approach for Acceleration Calculation
The aim of this section is to demonstrate the methodology used to compute the time taken for the go-kart to travel from 0-
90kmph using the fixed gearbox (manual) transmission system. The methodology is as follows:
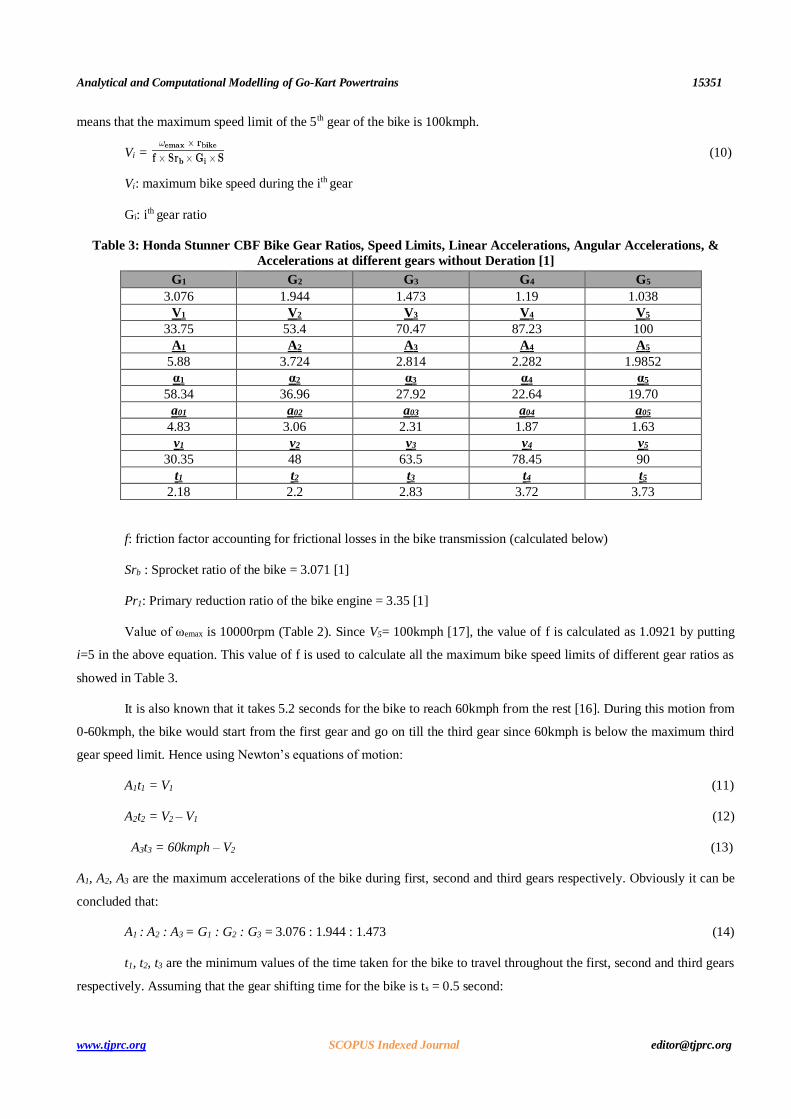
Figure 7: General Variation of the Vehicle Speed with the Engine Speed for a Fixed Gearbox Powertrain System
The above figure shows the general variation of vehicle speed with the engine speed for a manual transmission
system such as the fixed gearbox. Engine speed reaches its maximum value at the end of a particular gear and during gear
shifting, it decreases again. This speed variation causes jerks and the system does not allow the engine to operate at its
optimum (maximum) speed throughout the motion. The Honda Stunner CBF 125cc engine used in this case has a built in
gearbox that enables the same behavior that is depicted in Fig.7. The speed limits according to different gear ratios of the
original bike are calculated as follows i.e It is known that the maximum speed limit of the bike is 100kmph [17]. This
Analytical and Computational Modelling of Go-Kart Powertrains 15351
www.tjprc.org SCOPUS Indexed Journal [email protected]
means that the maximum speed limit of the 5th gear of the bike is 100kmph.
Vi = (10)
Vi: maximum bike speed during the ith gear
Gi: ith gear ratio
Table 3: Honda Stunner CBF Bike Gear Ratios, Speed Limits, Linear Accelerations, Angular Accelerations, &
Accelerations at different gears without Deration [1]
G1 G2 G3 G4 G5
3.076 1.944 1.473 1.19 1.038
V1 V2 V3 V4 V5
33.75 53.4 70.47 87.23 100
A1 A2 A3 A4 A5
5.88 3.724 2.814 2.282 1.9852
α1 α2 α3 α4 α5
58.34 36.96 27.92 22.64 19.70
a01 a02 a03 a04 a05
4.83 3.06 2.31 1.87 1.63
v1 v2 v3 v4 v5
30.35 48 63.5 78.45 90
t1 t2 t3 t4 t5
2.18 2.2 2.83 3.72 3.73
f: friction factor accounting for frictional losses in the bike transmission (calculated below)
Srb : Sprocket ratio of the bike = 3.071 [1]
Pr1: Primary reduction ratio of the bike engine = 3.35 [1]
Value of ωemax is 10000rpm (Table 2). Since V5= 100kmph [17], the value of f is calculated as 1.0921 by putting
i=5 in the above equation. This value of f is used to calculate all the maximum bike speed limits of different gear ratios as
showed in Table 3.
It is also known that it takes 5.2 seconds for the bike to reach 60kmph from the rest [16]. During this motion from
0-60kmph, the bike would start from the first gear and go on till the third gear since 60kmph is below the maximum third
gear speed limit. Hence using Newton’s equations of motion:
A1t1 = V1 (11)
A2t2 = V2 – V1 (12)
A3t3 = 60kmph – V2 (13)
A1, A2, A3 are the maximum accelerations of the bike during first, second and third gears respectively. Obviously it can be
concluded that:
A1 : A2 : A3 = G1 : G2 : G3 = 3.076 : 1.944 : 1.473 (14)
t1, t2, t3 are the minimum values of the time taken for the bike to travel throughout the first, second and third gears
respectively. Assuming that the gear shifting time for the bike is ts = 0.5 second:
15352 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
t1 + t2 + t3 = 5.2 – 2*ts (15)
Using the above five equations, the maximum linear accelerations for all the gears of the bike are as showed in
Table 3 as A1, A2..etc. Now let the angular accelerations of the gearbox outlet in the bike be denoted as αi where I = 1,2,3,4
or 5 for different gears.
αi= (16)
Hence the angular accelerations at the gearbox outlet shaft have been computed as showed in Table 3 as α.These angular
accelerations would be used to compute the linear acceleration values of the go-kart having the fixed gearbox as the
transmission driveline.
a0i = (17)
Where Sr1 was earlier computed as 1.35
Now we have the maximum acceleration values of the go-kart for each gear. By this logic, the speed limits for the
five gears of the go-kart can be calculated since the top speed is known as 90kmph (target for 70kmph). Variable vi is Top
speed of ith gear in the go-kart, v5 = 90 kmph. Since the ratios of all the vi are the same as inverse of the ratios of a0i, the
speed limits are calculated as showed in Table 3 as v. The go-kart also experiences rolling resistance which provides
resistance to motion. The coefficient of rolling resistance (Cr) is calculated as follows:
Cr = 0.05 + (1/b)*[0.01 + 0.0095(0.01*v)2] [8] (18)
ar=Crg (19)
Here b is the pressure of the rear tire in bar, v is the velocity in kmph and ar is the negative acceleration due to
rolling resistance. Since b = 20psi (past experience), the above equations can be simplified as:
ar = 0.562 + (6.75*10-6 * v2) (20)
Here v is in m/s. Now in order to calculate how much time is taken for the go-kart to travel from the rest to
90kmph, we will use the above obtained values. The actual accelerations during the different gears of the go-kart are
follows as, ai: Maximum actual linear acceleration of the go-kart for the ith gear
a1 = a01 – ar = 4.83 – [0.562 + (6.75x10-6 * v2)] (21)
a2 = a02 – ar = 3.06 - [0.562 + (6.75x10-6 * v2)] (22)
a3 = a03 – ar = 2.31 - [0.562 + (6.75x10-6 * v2)] (23)
a4 = a04 – ar = 1.87 - [0.562 + (6.75x10-6 * v2)] (24)
a5 = a05 – ar = 1.63 - [0.562 + (6.75x10-6 * v2)] (25)
Now in order to calculate how much time is taken for the go-kart to cover each and every gear with the lower and
the upper speed limits are known, the acceleration functions must be integrated between predefined limits since they are
continuous functions of velocities. During gear shifting in the go-kart, the engine is disconnected from the transmission due
to clutch disengagement. It is assumed that it takes 1 second for gear shifting in the go-kart [1]. Hence during these 1
second intervals, the speed of the go-kart must decrease due to the sole deceleration action of the acceleration due to rolling
Analytical and Computational Modelling of Go-Kart Powertrains 15353
www.tjprc.org SCOPUS Indexed Journal [email protected]
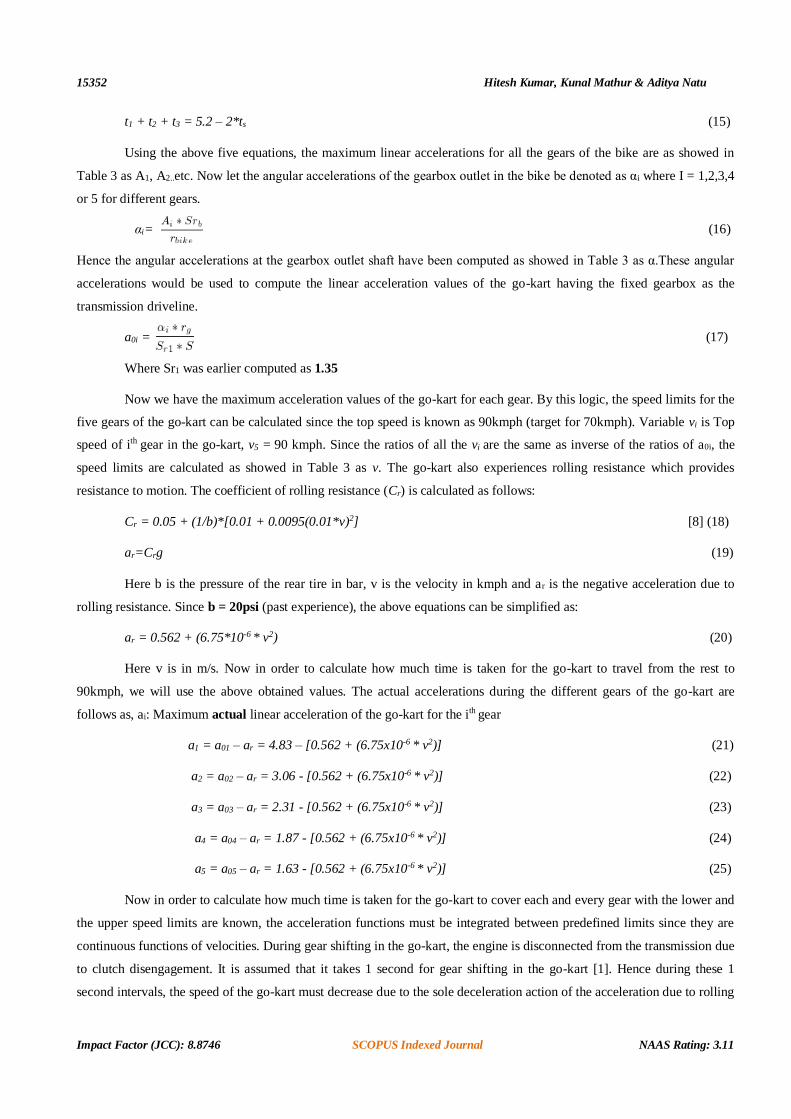
resistance. Aerodynamic drag is neglected in the analytical part of the study due to the lower frontal area of the go-kart as
compared to other vehicles. Since the integration of continuous differential equations are involved, mathematical
connections of MATLAB Simulink are used to solve the equations for obtaining the precise velocity variations with time.
Figure 8: MATLAB Simulink Model of Vehicle Speed Calculations for Different Gear Ratio
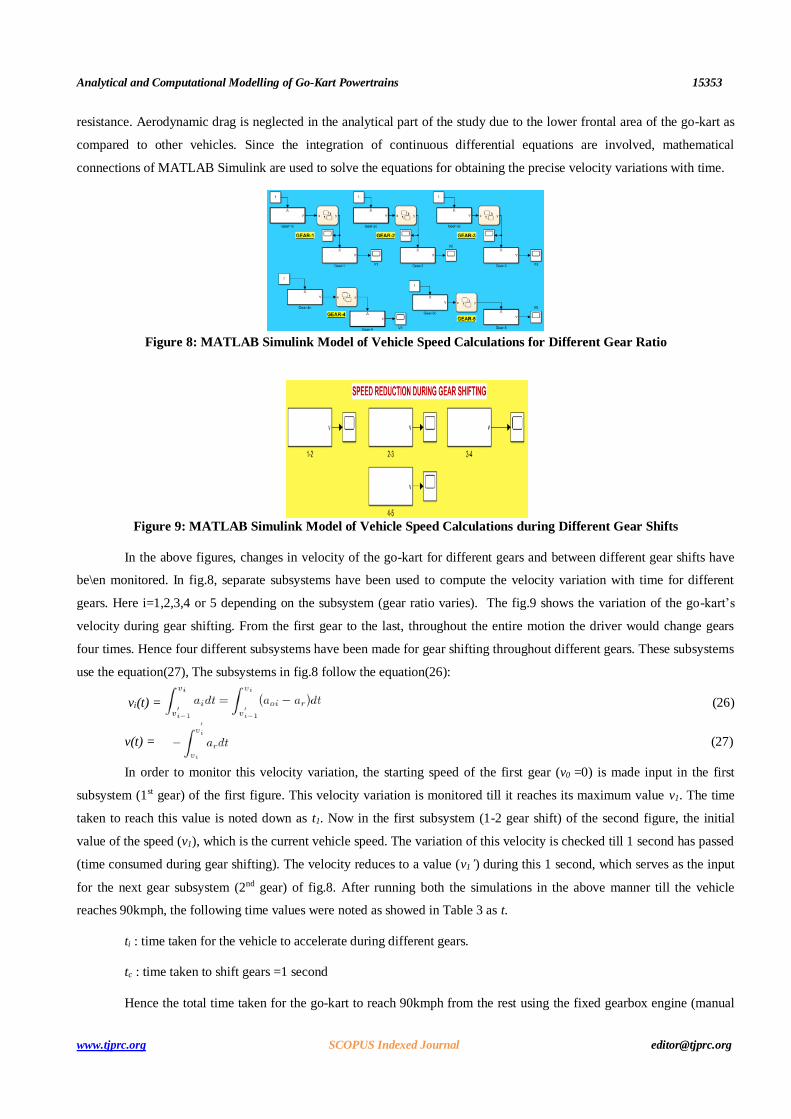
Figure 9: MATLAB Simulink Model of Vehicle Speed Calculations during Different Gear Shifts
In the above figures, changes in velocity of the go-kart for different gears and between different gear shifts have
be\en monitored. In fig.8, separate subsystems have been used to compute the velocity variation with time for different
gears. Here i=1,2,3,4 or 5 depending on the subsystem (gear ratio varies). The fig.9 shows the variation of the go-kart’s
velocity during gear shifting. From the first gear to the last, throughout the entire motion the driver would change gears
four times. Hence four different subsystems have been made for gear shifting throughout different gears. These subsystems
use the equation(27), The subsystems in fig.8 follow the equation(26):
vi(t) = (26)
v(t) = (27)
In order to monitor this velocity variation, the starting speed of the first gear (v0 =0) is made input in the first
subsystem (1st gear) of the first figure. This velocity variation is monitored till it reaches its maximum value v1. The time
taken to reach this value is noted down as t1. Now in the first subsystem (1-2 gear shift) of the second figure, the initial
value of the speed (v1), which is the current vehicle speed. The variation of this velocity is checked till 1 second has passed
(time consumed during gear shifting). The velocity reduces to a value (v1’) during this 1 second, which serves as the input
for the next gear subsystem (2nd gear) of fig.8. After running both the simulations in the above manner till the vehicle
reaches 90kmph, the following time values were noted as showed in Table 3 as t.
ti : time taken for the vehicle to accelerate during different gears.
tc : time taken to shift gears =1 second
Hence the total time taken for the go-kart to reach 90kmph from the rest using the fixed gearbox engine (manual

15354 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
transmission) is computed as
(28)
= 18.66 seconds.
2.2.6. Computational Approach for Acceleration Calculation
Figure 10: MATLAB Simscape Model of the Manual Transmission go-kart powertrain
In this section, the entire physical model of the powertrain system was created in MATLAB Simscape. All the
standard mechanical components were selected from the Simscape Library and their respective parameters were made
input. All these components are connected using standard rotating elements simulating shafts. Apart from the parameters
included in the analytical section, this simulation also includes parameters such as stiffness and damping of each
component, drag factors like aerodynamic and rolling resistance, chain slack of sprocket, steady throttle input, clutch
actuation and slip, meshing losses in gears, etc. Hence this is a much more precise technique for simulating a powertrain
system and includes those parameters that could not be included in hand calculations. Moreover the clutch was introduced
in this model in order to smooth out the power flow from the engine to the vehicle body.
This simulation was run by changing the fixed gear ratio of the manual gearbox whenever the maximum kart
speed of a gear is achieved and disconnecting the clutch for 1 second while shifting the gears as done before. The total time
taken by the vehicle to reach 70kmph was computed as 19.4 seconds. The maximum speed limit was chosen to be 70kmph
instead of 90kmph because this simulation was expected to include all those real time parameters that were not present in
the analytical method. Since the computational result is similar to the corresponding result calculated by the analytical
approach, our safety margin of 90kmph is validated.
2.3 Semi-Automatic Transmission (CVT Case)
In this case, the powertrain components of the go-kart having the CVT would be designed, analyzed or selected. After
designing and selecting all the components, the powertrain would be modelled using analytical and computational
approaches. Most of the numerical values associated with this type of transmission system have been assigned the subscript
“2”.
Analytical and Computational Modelling of Go-Kart Powertrains 15355
www.tjprc.org SCOPUS Indexed Journal [email protected]
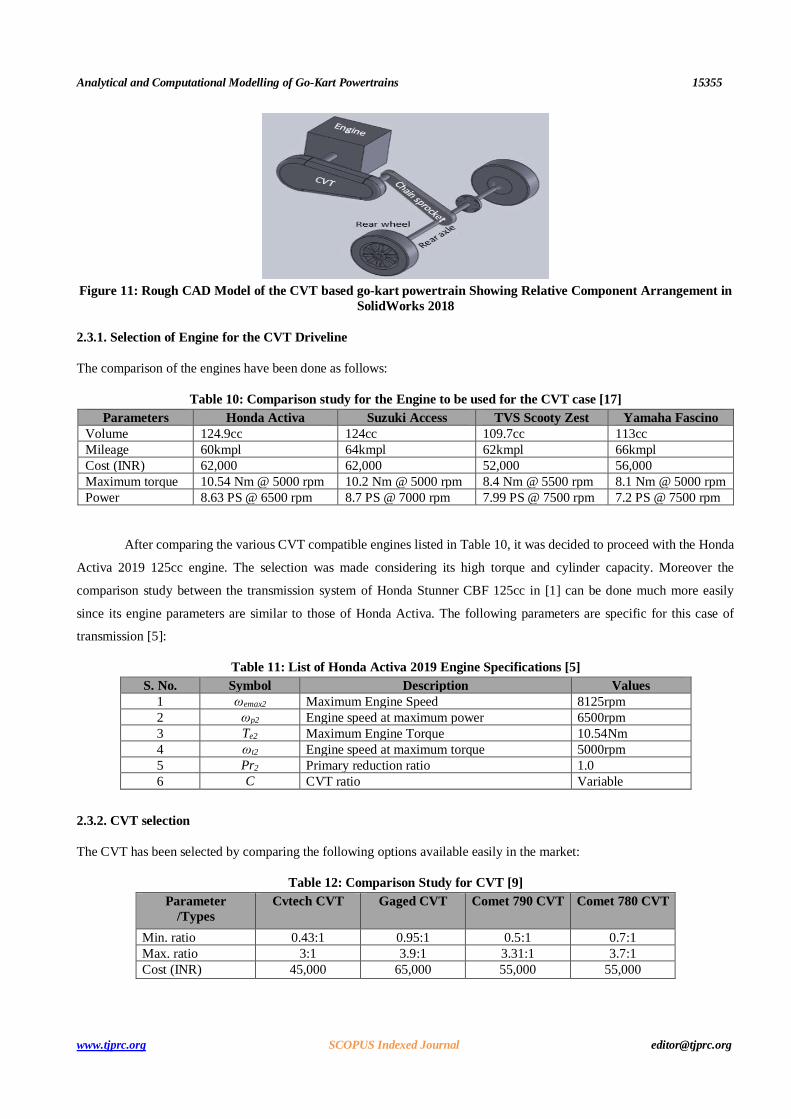
Figure 11: Rough CAD Model of the CVT based go-kart powertrain Showing Relative Component Arrangement in
SolidWorks 2018
2.3.1. Selection of Engine for the CVT Driveline
The comparison of the engines have been done as follows:
Table 10: Comparison study for the Engine to be used for the CVT case [17]
Parameters Honda Activa Suzuki Access TVS Scooty Zest Yamaha Fascino
Volume 124.9cc 124cc 109.7cc 113cc
Mileage 60kmpl 64kmpl 62kmpl 66kmpl
Cost (INR) 62,000 62,000 52,000 56,000
Maximum torque 10.54 Nm @ 5000 rpm 10.2 Nm @ 5000 rpm 8.4 Nm @ 5500 rpm 8.1 Nm @ 5000 rpm
Power 8.63 PS @ 6500 rpm 8.7 PS @ 7000 rpm 7.99 PS @ 7500 rpm 7.2 PS @ 7500 rpm
After comparing the various CVT compatible engines listed in Table 10, it was decided to proceed with the Honda
Activa 2019 125cc engine. The selection was made considering its high torque and cylinder capacity. Moreover the
comparison study between the transmission system of Honda Stunner CBF 125cc in [1] can be done much more easily
since its engine parameters are similar to those of Honda Activa. The following parameters are specific for this case of
transmission [5]:
Table 11: List of Honda Activa 2019 Engine Specifications [5]
S. No. Symbol Description Values
1 ωemax2 Maximum Engine Speed 8125rpm
2 ωp2 Engine speed at maximum power 6500rpm
3 Te2 Maximum Engine Torque 10.54Nm
4 ωt2 Engine speed at maximum torque 5000rpm
5 Pr2 Primary reduction ratio 1.0
6 C CVT ratio Variable
2.3.2. CVT selection
The CVT has been selected by comparing the following options available easily in the market:
Table 12: Comparison Study for CVT [9]
Parameter
/Types
Cvtech CVT Gaged CVT Comet 790 CVT Comet 780 CVT
Min. ratio 0.43:1 0.95:1 0.5:1 0.7:1
Max. ratio 3:1 3.9:1 3.31:1 3.7:1
Cost (INR) 45,000 65,000 55,000 55,000

15356 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
A higher value of the ratio at minimum speed (Max. ratio) was required to provide a larger torque to propel the
vehicle. Moreover a higher value of the ratio at maximum speed (Min. ratio) was required to limit the actual maximum
vehicle speed to 90kmph. A high CVT ratio also allows a lower sprocket ratio since they decrease the size of the sprocket
connection. The Gaged GX9 CVT fits well within the desired ratio requirements. Apart from the above parameters, the
Gaged CVT is lighter, tune-able and is more reliable than the other CVTs [10]. Considering the above reasons, Gaged GX9
CVT was finally selected for the CVT based go-kart. Hence Cmax = 3.9; Cmin = 0.95.
2.3.3. Jackshaft Designing
(i)Design
The output from the CVT is transferred to the jackshaft which is directly attached to its outlet. The jackshaft houses the
smaller driver sprocket. Hence the jackshaft is driven by the CVT, which in turn drives the rear axle of the go-kart through
the chain sprocket assembly.
Material of the jackshaft was chosen to be AISI-1020 due to the reasons mentioned before. The following
specifications of the jackshaft were finalized after consulting with the technical experts of Gaged GX9 CVT sellers and
suppliers of AISI-1020 shafts: do2: Outer diameter of the jackshaft = 0.019m, di2: Inner diameter of the jackshaft = 0.0114m
(Providing weight optimization and allowing space for the keyways to be cut), b2 x h2: Dimensions of the key: (3/32)” x
(3/32)” (validated later), l2: Length of the jackshaft = 0.2m, k: ratio of inner to outer diameter = 0.6. The following
approach is used to confirm the above dimensions of the jackshaft, i.e. checking whether the jackshaft can handle the loads
subjected to it or not. Te2: Maximum engine torque = 10.54Nm (Table 11). Mt2: Maximum turning moment/torque on the
jackshaft, Mass of the CVT = 6.35kg [11]. Estimated mass of the driver sprocket with its keys, hub and fasteners = 2kg
Mt2 = Te2 * Cmax = 10.54*3.9 = 41.106Nm (29)
The mass of CVT on the jackshaft would be taken as 6.35kg itself, to model for the worst case scenario. The mass
of the smaller sprocket has been taken as higher than its actual mass to model for the worst.
Figure 12: Loading and Bending Moment Diagram of jackshaft (where g is the acceleration due to gravity).
The above figure shows the loaded bending moment diagram of the jackshaft where Mb2 is the maximum bending
moment. The CVT is attached at the left end of the shaft which provides bearing reaction Ra. The driver sprocket is
mounted at the midpoint of the jackshaft, followed by the bearing at the right most end providing reaction Rb. Mb2 was
Analytical and Computational Modelling of Go-Kart Powertrains 15357
www.tjprc.org SCOPUS Indexed Journal [email protected]
calculated from moment balancing across the shaft as 0.981Nm.
σb2 = [13] (30)
The above equation [13] was used to ensure whether the bending stress, according to the selected dimensions of
the shaft was within the tensile yield strength or not. σb2 = 35.93 N/mm2
𝐹𝑂𝑆 = 𝑆𝑦𝑡 / 𝜎𝑏2 (31)
The factor of safety FOS comes out to be 8.2 which is quite safe.
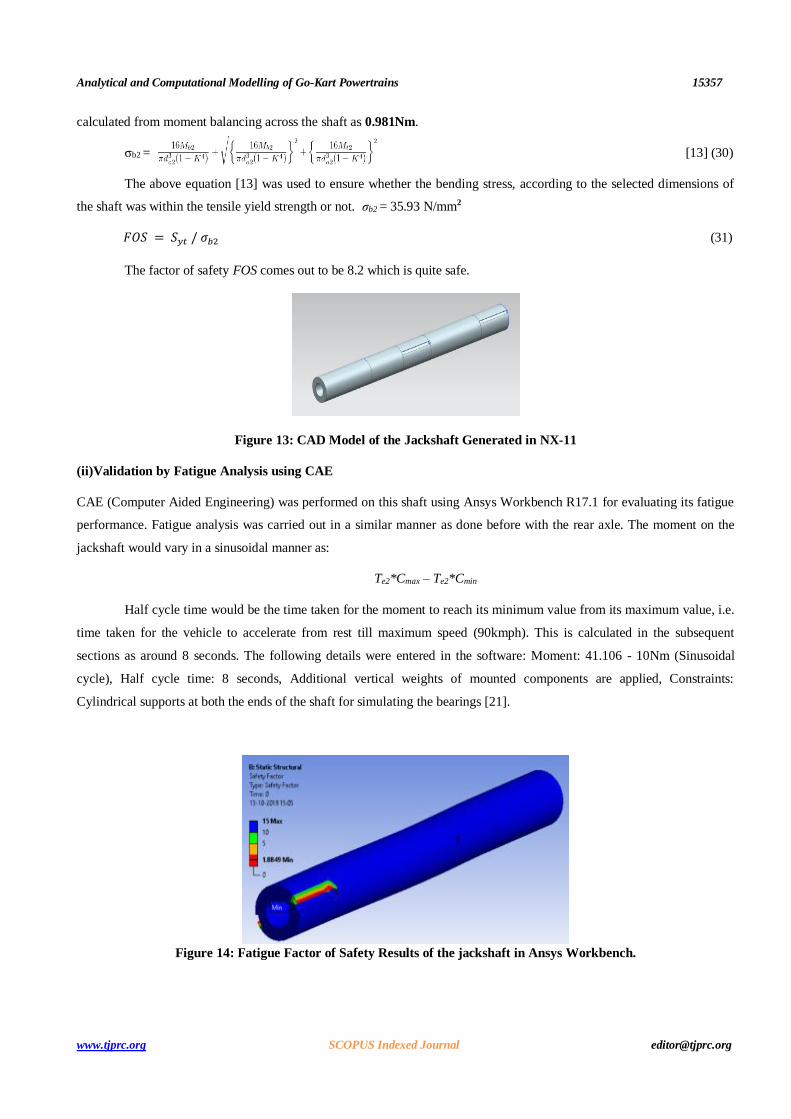
Figure 13: CAD Model of the Jackshaft Generated in NX-11
(ii)Validation by Fatigue Analysis using CAE
CAE (Computer Aided Engineering) was performed on this shaft using Ansys Workbench R17.1 for evaluating its fatigue
performance. Fatigue analysis was carried out in a similar manner as done before with the rear axle. The moment on the
jackshaft would vary in a sinusoidal manner as:
Te2*Cmax – Te2*Cmin
Half cycle time would be the time taken for the moment to reach its minimum value from its maximum value, i.e.
time taken for the vehicle to accelerate from rest till maximum speed (90kmph). This is calculated in the subsequent
sections as around 8 seconds. The following details were entered in the software: Moment: 41.106 - 10Nm (Sinusoidal
cycle), Half cycle time: 8 seconds, Additional vertical weights of mounted components are applied, Constraints:
Cylindrical supports at both the ends of the shaft for simulating the bearings [21].
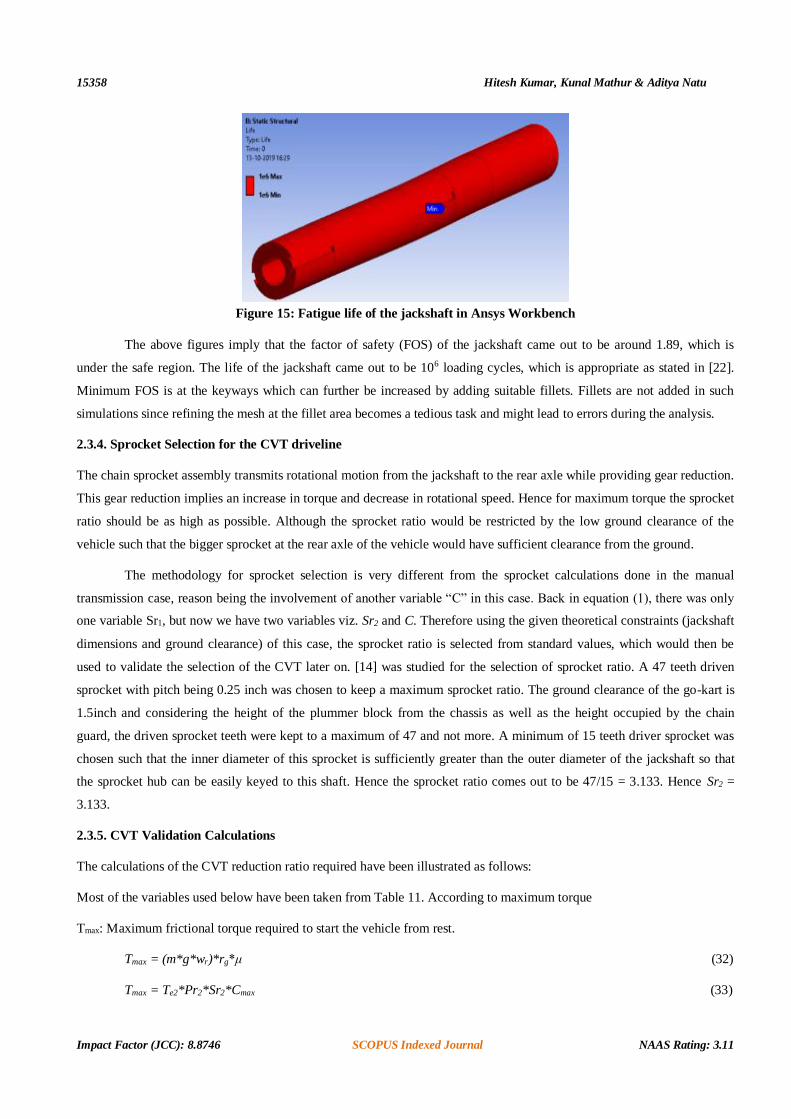
Figure 14: Fatigue Factor of Safety Results of the jackshaft in Ansys Workbench.
15358 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
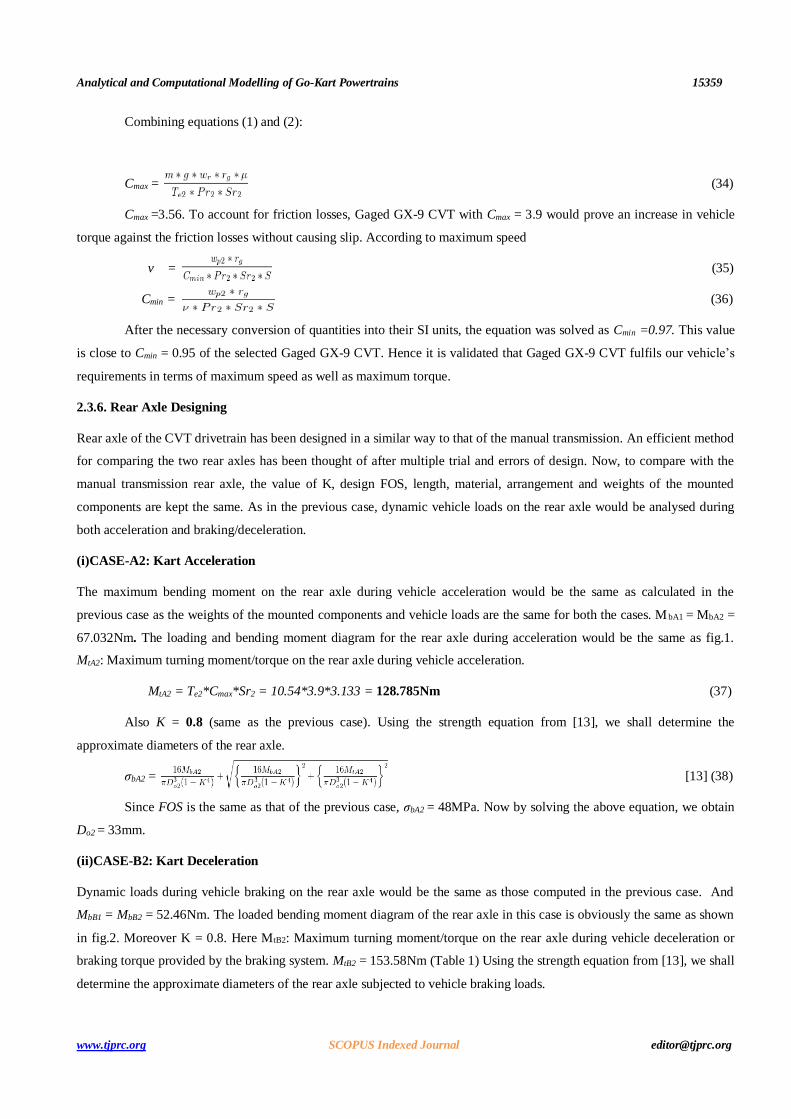
Figure 15: Fatigue life of the jackshaft in Ansys Workbench
The above figures imply that the factor of safety (FOS) of the jackshaft came out to be around 1.89, which is
under the safe region. The life of the jackshaft came out to be 106 loading cycles, which is appropriate as stated in [22].
Minimum FOS is at the keyways which can further be increased by adding suitable fillets. Fillets are not added in such
simulations since refining the mesh at the fillet area becomes a tedious task and might lead to errors during the analysis.
2.3.4. Sprocket Selection for the CVT driveline
The chain sprocket assembly transmits rotational motion from the jackshaft to the rear axle while providing gear reduction.
This gear reduction implies an increase in torque and decrease in rotational speed. Hence for maximum torque the sprocket
ratio should be as high as possible. Although the sprocket ratio would be restricted by the low ground clearance of the
vehicle such that the bigger sprocket at the rear axle of the vehicle would have sufficient clearance from the ground.
The methodology for sprocket selection is very different from the sprocket calculations done in the manual
transmission case, reason being the involvement of another variable “C” in this case. Back in equation (1), there was only
one variable Sr1, but now we have two variables viz. Sr2 and C. Therefore using the given theoretical constraints (jackshaft
dimensions and ground clearance) of this case, the sprocket ratio is selected from standard values, which would then be
used to validate the selection of the CVT later on. [14] was studied for the selection of sprocket ratio. A 47 teeth driven
sprocket with pitch being 0.25 inch was chosen to keep a maximum sprocket ratio. The ground clearance of the go-kart is
1.5inch and considering the height of the plummer block from the chassis as well as the height occupied by the chain
guard, the driven sprocket teeth were kept to a maximum of 47 and not more. A minimum of 15 teeth driver sprocket was
chosen such that the inner diameter of this sprocket is sufficiently greater than the outer diameter of the jackshaft so that
the sprocket hub can be easily keyed to this shaft. Hence the sprocket ratio comes out to be 47/15 = 3.133. Hence Sr2 =
3.133.
2.3.5. CVT Validation Calculations
The calculations of the CVT reduction ratio required have been illustrated as follows:
Most of the variables used below have been taken from Table 11. According to maximum torque
Tmax: Maximum frictional torque required to start the vehicle from rest.
Tmax = (m*g*wr)*rg*μ (32)
Tmax = Te2*Pr2*Sr2*Cmax (33)
Analytical and Computational Modelling of Go-Kart Powertrains 15359
www.tjprc.org SCOPUS Indexed Journal [email protected]
Combining equations (1) and (2):
Cmax = (34)
Cmax =3.56. To account for friction losses, Gaged GX-9 CVT with Cmax = 3.9 would prove an increase in vehicle
torque against the friction losses without causing slip. According to maximum speed
v = (35)
Cmin = (36)
After the necessary conversion of quantities into their SI units, the equation was solved as Cmin =0.97. This value
is close to Cmin = 0.95 of the selected Gaged GX-9 CVT. Hence it is validated that Gaged GX-9 CVT fulfils our vehicle’s
requirements in terms of maximum speed as well as maximum torque.
2.3.6. Rear Axle Designing
Rear axle of the CVT drivetrain has been designed in a similar way to that of the manual transmission. An efficient method
for comparing the two rear axles has been thought of after multiple trial and errors of design. Now, to compare with the
manual transmission rear axle, the value of K, design FOS, length, material, arrangement and weights of the mounted
components are kept the same. As in the previous case, dynamic vehicle loads on the rear axle would be analysed during
both acceleration and braking/deceleration.
(i)CASE-A2: Kart Acceleration
The maximum bending moment on the rear axle during vehicle acceleration would be the same as calculated in the
previous case as the weights of the mounted components and vehicle loads are the same for both the cases. M bA1 = MbA2 =
67.032Nm. The loading and bending moment diagram for the rear axle during acceleration would be the same as fig.1.
MtA2: Maximum turning moment/torque on the rear axle during vehicle acceleration.
MtA2 = Te2*Cmax*Sr2 = 10.54*3.9*3.133 = 128.785Nm (37)
Also K = 0.8 (same as the previous case). Using the strength equation from [13], we shall determine the
approximate diameters of the rear axle.
σbA2 = [13] (38)
Since FOS is the same as that of the previous case, σbA2 = 48MPa. Now by solving the above equation, we obtain
Do2 = 33mm.
(ii)CASE-B2: Kart Deceleration
Dynamic loads during vehicle braking on the rear axle would be the same as those computed in the previous case. And
MbB1 = MbB2 = 52.46Nm. The loaded bending moment diagram of the rear axle in this case is obviously the same as shown
in fig.2. Moreover K = 0.8. Here MtB2: Maximum turning moment/torque on the rear axle during vehicle deceleration or
braking torque provided by the braking system. MtB2 = 153.58Nm (Table 1) Using the strength equation from [13], we shall
determine the approximate diameters of the rear axle subjected to vehicle braking loads.
15360 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
σbA2 = [13] (39)
Since the FOS was to be constant, σbA2 = 48MPa, as in the previous transmission case. By solving the above
equation, we obtain Do2 = 33.5mm.
(iii)Final Design of the Rear Axle
Now, comparing the acceleration and the braking case, the diameter in the braking case comes out to be the largest. Hence
the braking event of the vehicle would generate the largest load on the rear axle, in contrast to what happened in the
manual transmission case where the acceleration load was the largest. Now this braking event would be used in the fatigue
analysis of the rear axle to make the design safer against the high braking loads.
Finally, the following dimensions of the rear axle were decided upon, based on the above strength results,
availability of the desired shaft diameters (closest to the diameter obtained above) with the supplier and inner diameters of
standard plummer block bearings. L: length = 880mm (kept same as in the previous case for the sake of comparison), Do2:
outer diameter = 32mm, Di2: inner diameter = 25mm, K: ratio of inner diameter to outer diameter = 0.72 (chosen to be as
close as possible to 0.8 which was in the previous case), B2 x H2: dimension of keys = 4mm x 4mm (validated later). This
slight change in the dimensions would decrease the FOS by a very small value. The following is the CAD model of the
CVT case rear axle made in NX-11.
Figure 16: CAD model of the Semi-Automatic Transmission Rear Axle in NX-11
(iv)Validation of the Design by Fatigue Analysis using CAE
CAE using Ansys Workbench is performed on the rear axle to carry out fatigue analysis, which would ensure that the
design survives the loading conditions that were made input for a sufficiently long period of loading cycles. The moment
on the rear axle would vary in a sinusoidal manner as:
Te2*Sr2*Cmin – (-Tb)
The above torque variation signifies that the vehicle starts its braking at its actual top speed of 70kmph, where the
torque acting on the rear axle is Te2*Sr2*Cmin exerted by the driven sprocket. But when the vehicle reaches a complete stop,
the torque on the rear axle is due to its braking system being Tb exerted by the brake disc. This transition of torque will
happen in a sinusoidal manner and is accordingly made input to the software, along with the positions where they are
acting. For example the torque at time equal to 0 (i.e Te2*Sr2*Cmin) would be applied at the edge of the sprocket hub
keyways, whereas the torque at time equal to the “half cycle time” (Tb) would be applied at edge of brake disc hub
keyways. Half cycle time would be the time taken for the torque on the rear axle to reach Tb from Te2*Sr2*Cmin i.e. time

Analytical and Computational Modelling of Go-Kart Powertrains 15361
www.tjprc.org SCOPUS Indexed Journal [email protected]
taken for the vehicle to brake from its top speed and come to rest. This is equal to td = 3 seconds (Table 1). The following
details were entered in the software: Moment: 31.37Nm – (-153.58Nm) (Sinusoidal cycle), Half cycle time: 3 seconds.
Additional vertical weights of mounted components and vehicle loads during braking are applied. Constraints: Cylindrical
supports at both the bearing surfaces of the rear axle for simulating bearings [21].
Figure 17: Fatigue Factor of safety for the semi-automatic Transmission Rear Axle in Ansys Workbench.
Figure 18: Fatigue life for the Semi-Automatic Transmission Rear axle in Ansys Workbench
The above figures imply that the factor of safety (FOS) of the rear axle came out to be around 1.27, which was
under the safe region. The life of the rear axle came out to be 106 loading cycles which was quite suitable [20]. Minimum
FOS is at the keyways which can further be increased by adding suitable fillets.
2.3.7. Key Designing
The two components in this type of transmission that use keys are jackshaft and the rear axle. Since the thickness of both
the rear axles of manual and semi-automatic transmissions are equal, the maximum standard key that can be used is the
4mm square key that was used in the previous case. B2 x H2 : dimension of keys = 4mm x 4mm, B2: base length of the keys
= 4mm, H2: height of the keys= 4mm, Lk2: length of the keys = 45mm. In order to validate these dimensions according to
the loading conditions on the keys, equations (8) – (9) would be used again to change the subscripts from 1 to 2, since the
dimensions, material of the keys and maximum possible torque on the keys (i.e Tb) remain the same. Hence the rear axle
keys are safe from failure. The keys would also be assembled in the same manner as that in the manual transmission case,
since the arrangement of the mounted components remain the same.
One pair of keys in the jackshaft is used to lock the motion of the jackshaft to that of the CVT outlet. The other
pair of keys are used to lock the motion of driver sprocket hub to that of the jackshaft. The dimensions of the jackshaft
keys were fixed from the suppliers of the Gaged GX-9 CVT. They were as follows: b2 x h2 : dimension of keys =
(3/32)inch x (3/32)inch , b2: base length of the keys = (3/32) inch, h2: height of the keys= (3/32) inch ,lk2: length of the keys
15362 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
= 30mm. These selected dimensions were validated by the following strength equations from [13]:
[13] (40)
σc = [13] (41)
τ = 60.57MPa and σc = 121.14MPa, which are less than the limits of Stainless Steel Grade 304 mentioned in the
manual transmission section. Hence the jackshaft keys are also safe from failure. The following figure is a CAD model of a
jackshaft key generated in SolidWorks 2018 with necessary fillets.
Figure 19: CAD Model of the jackshaft keys in SolidWorks 2018
2.3.8. Analytical approach for Acceleration Calculation
In this section, the methodology for computing the time required for the semi-automatic transmission go-kart to reach
90kmph from rest has been demonstrated.
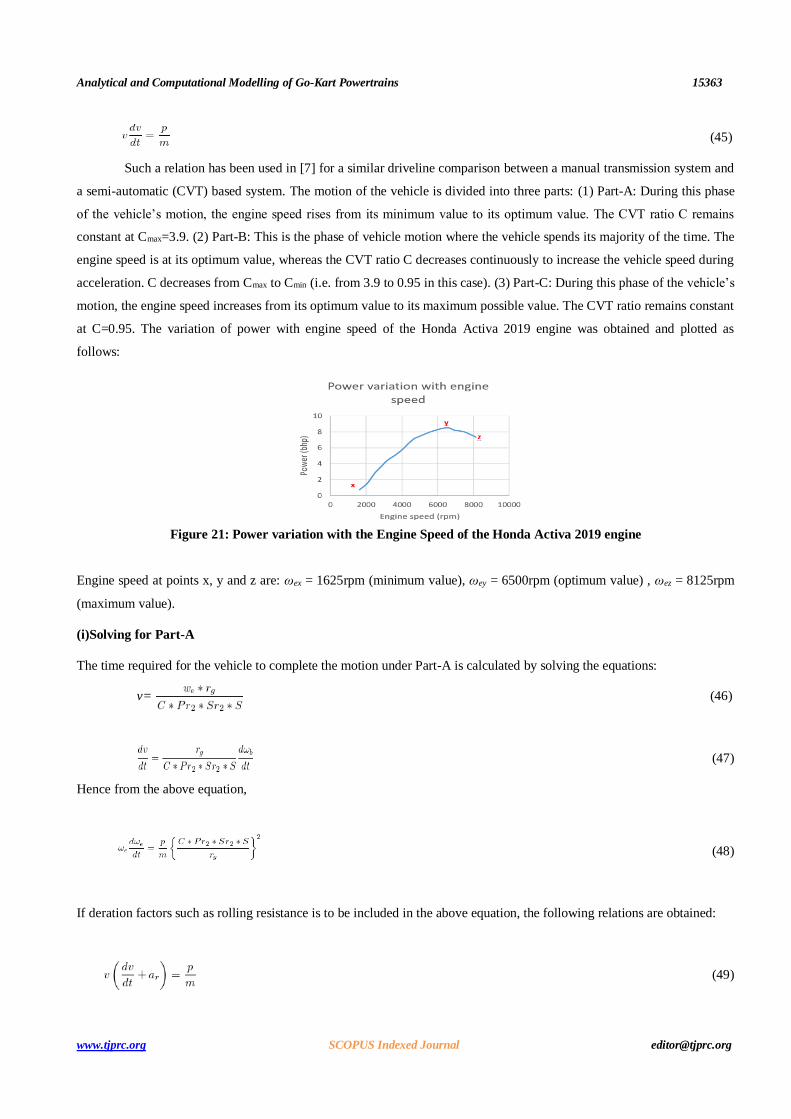
Figure 20: General variation of the vehicle speed with the Engine Speed in a semi-automatic (CVT based)
Powertrain System
The above figure shows the variation of the vehicle speed with engine speed. The engine is operated at its
optimum speed (where the power is at its peak value) throughout the motion of the vehicle unlike in the manual
transmission case. The engine speed remains constant during the better part of the motion, with the CVT ratio decreasing in
order to increase the vehicle speed. The methodology for computing the time is as follows:
F: force, m: mass of the vehicle = 160kg, a: acceleration, P: power, v: linear speed, t: time, C: CVT ratio, ωe:
engine speed
F=ma (42)
P=Fv (43)
(44)
Analytical and Computational Modelling of Go-Kart Powertrains 15363
www.tjprc.org SCOPUS Indexed Journal [email protected]
(45)
Such a relation has been used in [7] for a similar driveline comparison between a manual transmission system and
a semi-automatic (CVT) based system. The motion of the vehicle is divided into three parts: (1) Part-A: During this phase
of the vehicle’s motion, the engine speed rises from its minimum value to its optimum value. The CVT ratio C remains
constant at Cmax=3.9. (2) Part-B: This is the phase of vehicle motion where the vehicle spends its majority of the time. The
engine speed is at its optimum value, whereas the CVT ratio C decreases continuously to increase the vehicle speed during
acceleration. C decreases from Cmax to Cmin (i.e. from 3.9 to 0.95 in this case). (3) Part-C: During this phase of the vehicle’s
motion, the engine speed increases from its optimum value to its maximum possible value. The CVT ratio remains constant
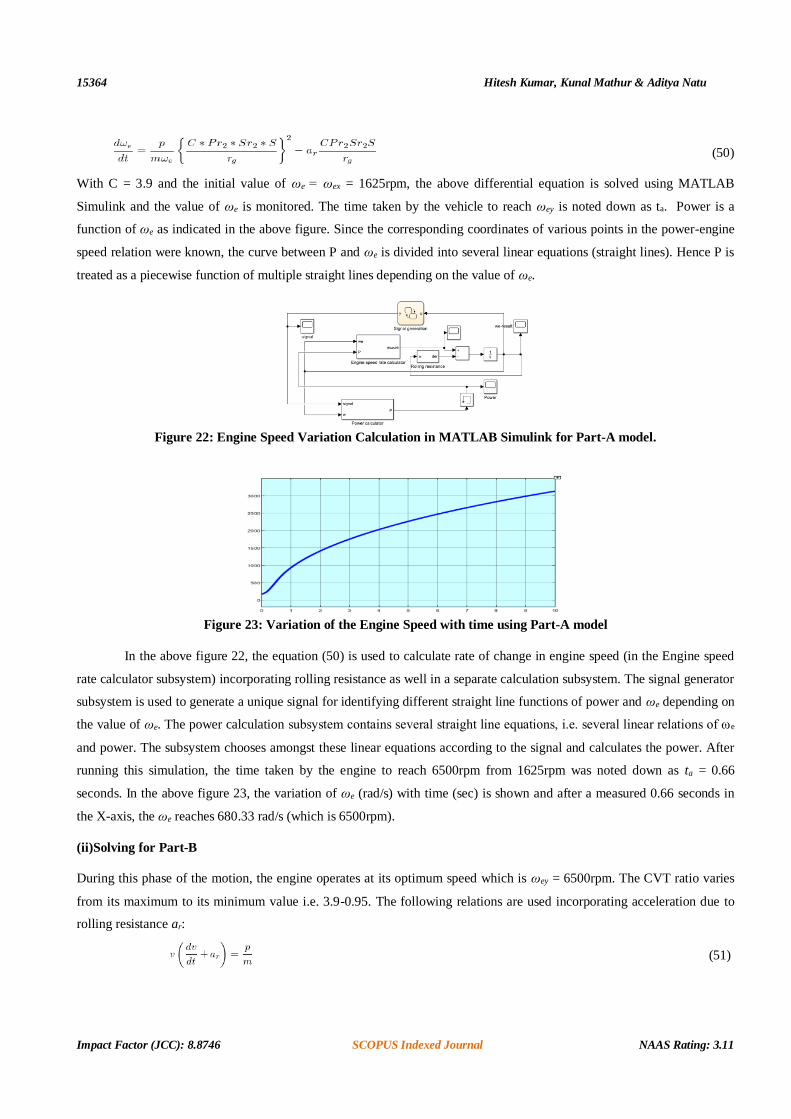
at C=0.95. The variation of power with engine speed of the Honda Activa 2019 engine was obtained and plotted as
follows:
Figure 21: Power variation with the Engine Speed of the Honda Activa 2019 engine
Engine speed at points x, y and z are: ωex = 1625rpm (minimum value), ωey = 6500rpm (optimum value) , ωez = 8125rpm
(maximum value).
(i)Solving for Part-A
The time required for the vehicle to complete the motion under Part-A is calculated by solving the equations:
v= (46)
(47)
Hence from the above equation,
(48)
If deration factors such as rolling resistance is to be included in the above equation, the following relations are obtained:
(49)
15364 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
(50)
With C = 3.9 and the initial value of ωe = ωex = 1625rpm, the above differential equation is solved using MATLAB
Simulink and the value of ωe is monitored. The time taken by the vehicle to reach ωey is noted down as ta. Power is a
function of ωe as indicated in the above figure. Since the corresponding coordinates of various points in the power-engine
speed relation were known, the curve between P and ωe is divided into several linear equations (straight lines). Hence P is
treated as a piecewise function of multiple straight lines depending on the value of ωe.
Figure 22: Engine Speed Variation Calculation in MATLAB Simulink for Part-A model.
Figure 23: Variation of the Engine Speed with time using Part-A model
In the above figure 22, the equation (50) is used to calculate rate of change in engine speed (in the Engine speed
rate calculator subsystem) incorporating rolling resistance as well in a separate calculation subsystem. The signal generator
subsystem is used to generate a unique signal for identifying different straight line functions of power and ωe depending on
the value of ωe. The power calculation subsystem contains several straight line equations, i.e. several linear relations of ωe
and power. The subsystem chooses amongst these linear equations according to the signal and calculates the power. After
running this simulation, the time taken by the engine to reach 6500rpm from 1625rpm was noted down as ta = 0.66
seconds. In the above figure 23, the variation of ωe (rad/s) with time (sec) is shown and after a measured 0.66 seconds in
the X-axis, the ωe reaches 680.33 rad/s (which is 6500rpm).
(ii)Solving for Part-B
During this phase of the motion, the engine operates at its optimum speed which is ωey = 6500rpm. The CVT ratio varies
from its maximum to its minimum value i.e. 3.9-0.95. The following relations are used incorporating acceleration due to
rolling resistance ar:
(51)
Analytical and Computational Modelling of Go-Kart Powertrains 15365
www.tjprc.org SCOPUS Indexed Journal [email protected]
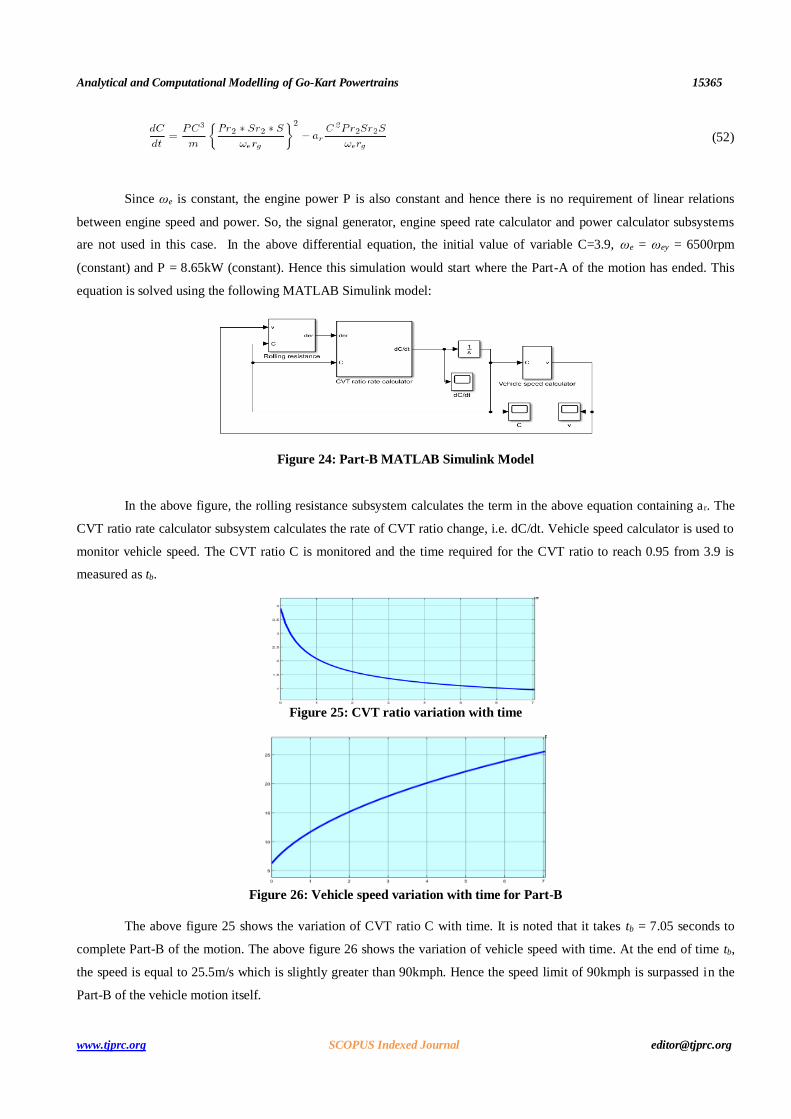
(52)
Since ωe is constant, the engine power P is also constant and hence there is no requirement of linear relations
between engine speed and power. So, the signal generator, engine speed rate calculator and power calculator subsystems
are not used in this case. In the above differential equation, the initial value of variable C=3.9, ωe = ωey = 6500rpm
(constant) and P = 8.65kW (constant). Hence this simulation would start where the Part-A of the motion has ended. This
equation is solved using the following MATLAB Simulink model:
Figure 24: Part-B MATLAB Simulink Model
In the above figure, the rolling resistance subsystem calculates the term in the above equation containing a r. The
CVT ratio rate calculator subsystem calculates the rate of CVT ratio change, i.e. dC/dt. Vehicle speed calculator is used to
monitor vehicle speed. The CVT ratio C is monitored and the time required for the CVT ratio to reach 0.95 from 3.9 is
measured as tb.
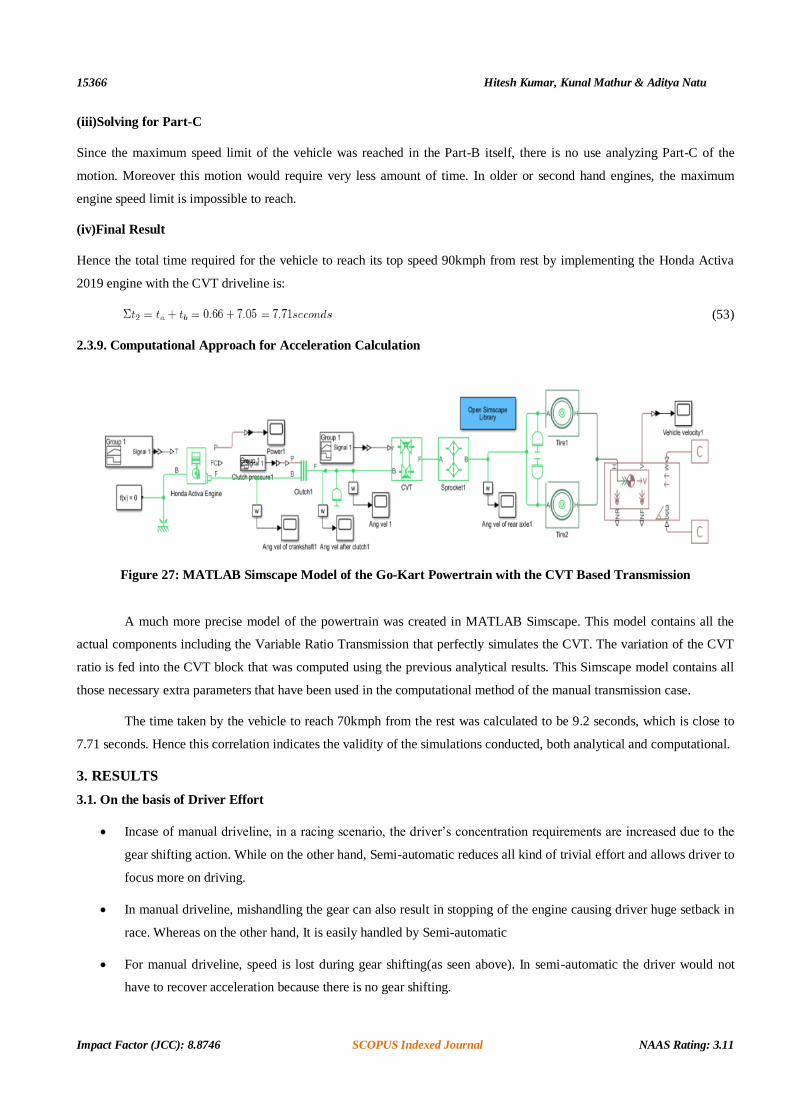
Figure 25: CVT ratio variation with time
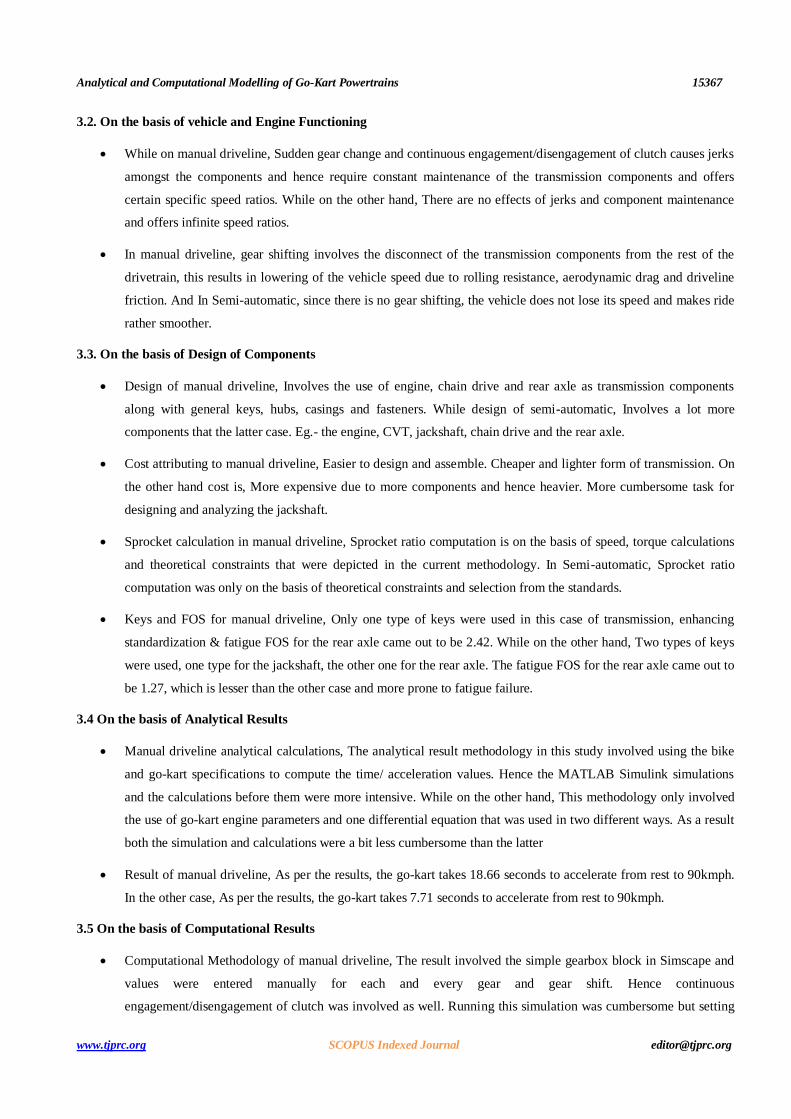
Figure 26: Vehicle speed variation with time for Part-B
The above figure 25 shows the variation of CVT ratio C with time. It is noted that it takes tb = 7.05 seconds to
complete Part-B of the motion. The above figure 26 shows the variation of vehicle speed with time. At the end of time tb,
the speed is equal to 25.5m/s which is slightly greater than 90kmph. Hence the speed limit of 90kmph is surpassed in the
Part-B of the vehicle motion itself.
15366 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
(iii)Solving for Part-C
Since the maximum speed limit of the vehicle was reached in the Part-B itself, there is no use analyzing Part-C of the
motion. Moreover this motion would require very less amount of time. In older or second hand engines, the maximum
engine speed limit is impossible to reach.
(iv)Final Result
Hence the total time required for the vehicle to reach its top speed 90kmph from rest by implementing the Honda Activa
2019 engine with the CVT driveline is:
(53)
2.3.9. Computational Approach for Acceleration Calculation
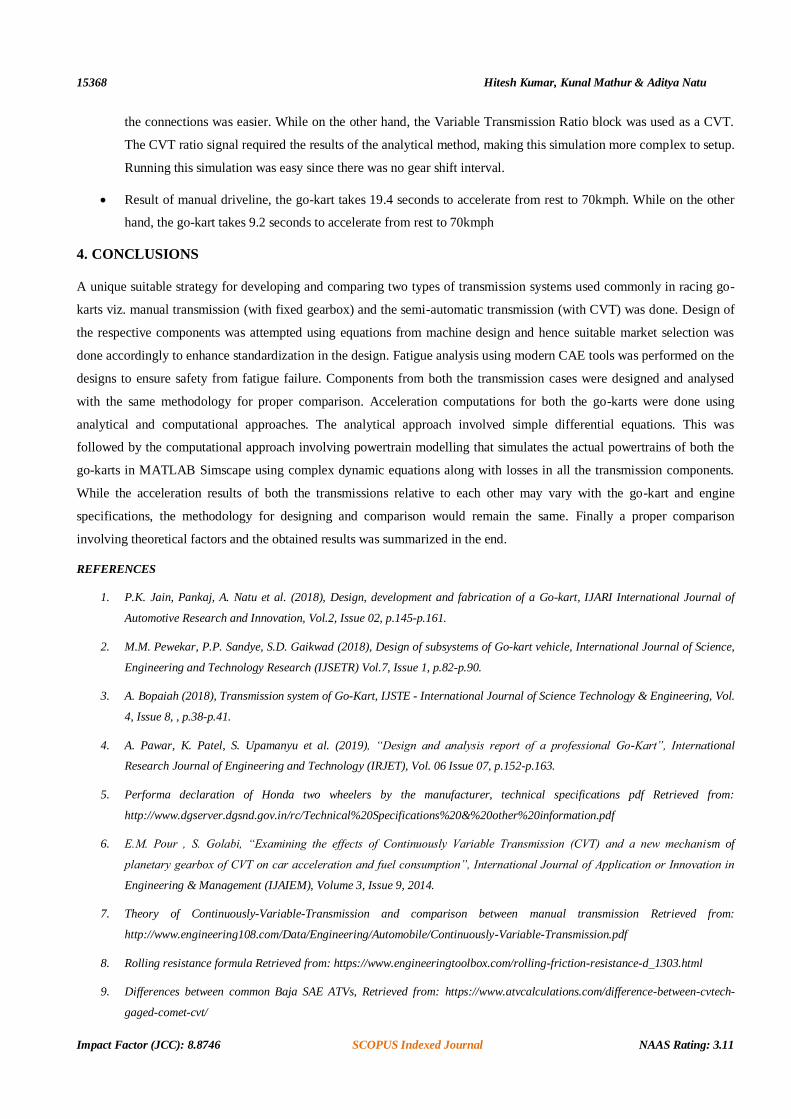
Figure 27: MATLAB Simscape Model of the Go-Kart Powertrain with the CVT Based Transmission
A much more precise model of the powertrain was created in MATLAB Simscape. This model contains all the
actual components including the Variable Ratio Transmission that perfectly simulates the CVT. The variation of the CVT
ratio is fed into the CVT block that was computed using the previous analytical results. This Simscape model contains all
those necessary extra parameters that have been used in the computational method of the manual transmission case.
The time taken by the vehicle to reach 70kmph from the rest was calculated to be 9.2 seconds, which is close to
7.71 seconds. Hence this correlation indicates the validity of the simulations conducted, both analytical and computational.
3. RESULTS
3.1. On the basis of Driver Effort
Incase of manual driveline, in a racing scenario, the driver’s concentration requirements are increased due to the
gear shifting action. While on the other hand, Semi-automatic reduces all kind of trivial effort and allows driver to
focus more on driving.
In manual driveline, mishandling the gear can also result in stopping of the engine causing driver huge setback in
race. Whereas on the other hand, It is easily handled by Semi-automatic
For manual driveline, speed is lost during gear shifting(as seen above). In semi-automatic the driver would not
have to recover acceleration because there is no gear shifting.
Analytical and Computational Modelling of Go-Kart Powertrains 15367
www.tjprc.org SCOPUS Indexed Journal [email protected]
3.2. On the basis of vehicle and Engine Functioning
While on manual driveline, Sudden gear change and continuous engagement/disengagement of clutch causes jerks
amongst the components and hence require constant maintenance of the transmission components and offers
certain specific speed ratios. While on the other hand, There are no effects of jerks and component maintenance
and offers infinite speed ratios.
In manual driveline, gear shifting involves the disconnect of the transmission components from the rest of the
drivetrain, this results in lowering of the vehicle speed due to rolling resistance, aerodynamic drag and driveline
friction. And In Semi-automatic, since there is no gear shifting, the vehicle does not lose its speed and makes ride
rather smoother.
3.3. On the basis of Design of Components
Design of manual driveline, Involves the use of engine, chain drive and rear axle as transmission components
along with general keys, hubs, casings and fasteners. While design of semi-automatic, Involves a lot more
components that the latter case. Eg.- the engine, CVT, jackshaft, chain drive and the rear axle.
Cost attributing to manual driveline, Easier to design and assemble. Cheaper and lighter form of transmission. On
the other hand cost is, More expensive due to more components and hence heavier. More cumbersome task for
designing and analyzing the jackshaft.
Sprocket calculation in manual driveline, Sprocket ratio computation is on the basis of speed, torque calculations
and theoretical constraints that were depicted in the current methodology. In Semi-automatic, Sprocket ratio
computation was only on the basis of theoretical constraints and selection from the standards.
Keys and FOS for manual driveline, Only one type of keys were used in this case of transmission, enhancing
standardization & fatigue FOS for the rear axle came out to be 2.42. While on the other hand, Two types of keys
were used, one type for the jackshaft, the other one for the rear axle. The fatigue FOS for the rear axle came out to
be 1.27, which is lesser than the other case and more prone to fatigue failure.
3.4 On the basis of Analytical Results
Manual driveline analytical calculations, The analytical result methodology in this study involved using the bike
and go-kart specifications to compute the time/ acceleration values. Hence the MATLAB Simulink simulations
and the calculations before them were more intensive. While on the other hand, This methodology only involved
the use of go-kart engine parameters and one differential equation that was used in two different ways. As a result
both the simulation and calculations were a bit less cumbersome than the latter
Result of manual driveline, As per the results, the go-kart takes 18.66 seconds to accelerate from rest to 90kmph.
In the other case, As per the results, the go-kart takes 7.71 seconds to accelerate from rest to 90kmph.
3.5 On the basis of Computational Results
Computational Methodology of manual driveline, The result involved the simple gearbox block in Simscape and
values were entered manually for each and every gear and gear shift. Hence continuous
engagement/disengagement of clutch was involved as well. Running this simulation was cumbersome but setting
15368 Hitesh Kumar, Kunal Mathur & Aditya Natu
Impact Factor (JCC): 8.8746 SCOPUS Indexed Journal NAAS Rating: 3.11
the connections was easier. While on the other hand, the Variable Transmission Ratio block was used as a CVT.
The CVT ratio signal required the results of the analytical method, making this simulation more complex to setup.
Running this simulation was easy since there was no gear shift interval.
Result of manual driveline, the go-kart takes 19.4 seconds to accelerate from rest to 70kmph. While on the other
hand, the go-kart takes 9.2 seconds to accelerate from rest to 70kmph
4. CONCLUSIONS
A unique suitable strategy for developing and comparing two types of transmission systems used commonly in racing go-
karts viz. manual transmission (with fixed gearbox) and the semi-automatic transmission (with CVT) was done. Design of
the respective components was attempted using equations from machine design and hence suitable market selection was
done accordingly to enhance standardization in the design. Fatigue analysis using modern CAE tools was performed on the
designs to ensure safety from fatigue failure. Components from both the transmission cases were designed and analysed
with the same methodology for proper comparison. Acceleration computations for both the go-karts were done using
analytical and computational approaches. The analytical approach involved simple differential equations. This was
followed by the computational approach involving powertrain modelling that simulates the actual powertrains of both the
go-karts in MATLAB Simscape using complex dynamic equations along with losses in all the transmission components.
While the acceleration results of both the transmissions relative to each other may vary with the go-kart and engine
specifications, the methodology for designing and comparison would remain the same. Finally a proper comparison
involving theoretical factors and the obtained results was summarized in the end.
REFERENCES
1. P.K. Jain, Pankaj, A. Natu et al. (2018), Design, development and fabrication of a Go-kart, IJARI International Journal of
Automotive Research and Innovation, Vol.2, Issue 02, p.145-p.161.
2. M.M. Pewekar, P.P. Sandye, S.D. Gaikwad (2018), Design of subsystems of Go-kart vehicle, International Journal of Science,
Engineering and Technology Research (IJSETR) Vol.7, Issue 1, p.82-p.90.
3. A. Bopaiah (2018), Transmission system of Go-Kart, IJSTE - International Journal of Science Technology & Engineering, Vol.
4, Issue 8, , p.38-p.41.
4. A. Pawar, K. Patel, S. Upamanyu et al. (2019), “Design and analysis report of a professional Go-Kart”, International
Research Journal of Engineering and Technology (IRJET), Vol. 06 Issue 07, p.152-p.163.
5. Performa declaration of Honda two wheelers by the manufacturer, technical specifications pdf Retrieved from:
http://www.dgserver.dgsnd.gov.in/rc/Technical%20Specifications%20&%20other%20information.pdf
6. E.M. Pour , S. Golabi, “Examining the effects of Continuously Variable Transmission (CVT) and a new mechanism of
planetary gearbox of CVT on car acceleration and fuel consumption”, International Journal of Application or Innovation in
Engineering & Management (IJAIEM), Volume 3, Issue 9, 2014.
7. Theory of Continuously-Variable-Transmission and comparison between manual transmission Retrieved from:
http://www.engineering108.com/Data/Engineering/Automobile/Continuously-Variable-Transmission.pdf
8. Rolling resistance formula Retrieved from: https://www.engineeringtoolbox.com/rolling-friction-resistance-d_1303.html
9. Differences between common Baja SAE ATVs, Retrieved from: https://www.atvcalculations.com/difference-between-cvtech-
gaged-comet-cvt/
Analytical and Computational Modelling of Go-Kart Powertrains 15369
www.tjprc.org SCOPUS Indexed Journal [email protected]
10. K. Piepmeyer, “A baccalaureate thesis” submitted to the Department of Mechanical and Materials Engineering College of
Engineering and Applied Science University of Cincinnati, 2016 University of Cincinnati Baja SAE Drivetrain.
11. E.T. Garza, “2016-2017 drivetrain overview”, October 30, 2016, Ur Baja Sae Yellow Jacket Racing Retrieved from,
https://sa.rochester.edu/baja/2016/10/2016-
2017drivetrainoverview/#targetText=The%20Gaged%20CVT%20itself%20weighs,ratio%2C%20meaning%20a%20lighter%2
0gearbox.
12. Azom.com for material properties Retrieved from https://www.azom.com/article. aspx?ArticleID=6114
13. V.B. Bhandari. Design of Machine Elements. Third Edition, p.333.
14. Brewton Iron Works Inc., Sprocket Engineering Data Retrieved from, https://dokumen.tips/documents/sprocket-engineering-
data-brewton-iron-works-inc-a-3-sprocket-nomenclatures.html.
15. T.K. Bera, K. Bhattacharya, A.K. Samantaray (2011). Evaluation of antilock braking system with an integrated model of full
vehicle system dynamics. Department of Mechanical Engineering, Indian Institute of Technology, 721302 Kharagpur, India,
November, p.138-147.
16. Honda Stunner bike specifications Retrieved from: http://overdrive.in/reviews/spec-comparison-suzuki-gixxer-sf-vs-yamaha-
fazer-vs-bajaj-pulsar-220f-vs-hero-karizma-r/
17. Honda Stunner CBF 125cc bike specifications Retrieved from: https://www.zigwheels.com/newbikes/Honda/CBF-Stunner
18. V.B. Bhandari. Machine Design Data Book, p.9.1-9.45.
19. R. Stone, and J. Ball. Automotive Engineering Fundamentals. (Warrendale: Society of Automotive Engineers, 2004). ISBN:
978-0-7680-0987-3, p.187.
20. J.Z. Yi, P.D. Lee, T.C. Lindley, et al. (2006), “Statistical modeling of microstructure and defect population effects on the
fatigue performance of cast A356-T6 automotive components”, Materials Science and Engineering A-432 59–68, p.62.
21. K. Mathur, L.K. Choudhary, A.M. Natu, et al. (2019), “Conceptualization and modeling of a flywheel-based regenerative
braking system for a commercial electric bus”, SAE International Journal of Commercial Vehicles, Vol. 12, Issue 4, p.8-p.11.






























