Embed Size (px)
Citation preview

Josep Maria Font [email protected]
Mecánica de Sistemas Multicuerpo:Análisis de la Silla de Ruedas “Triesférica” y Dinámica de la Marcha de Sistemas Bípedos
Universidad Pública de Navarra
12 de Noviembre de 2008
Departamento de Ingeniería Mecánica,
Energética y de Materiales
Departamentode Ingeniería Mecánica
McGill University

Presentation Contents
Wheelchair Kinematics
Wheelchairs with Conventional Wheels
Wheelchair with Omnidirectional Wheels
Introduction to Wheelchair Dynamics
Introduction to Dynamic Walking
Dynamic Model of the Walking System
Decomposition of the Impulsive Motion
Numerical Results and Discussion
Mechanics of Wheelchairs
Biomechanics of Bipedal Systems

Wheelchair Kinematics
Degrees of Freedom of a Wheelchair

Wheelchair Kinematics
Control of a Wheelchair with Differential Steering

Wheelchair Kinematics
Control of a Wheelchair with Differential Steering

Wheelchair Kinematics
Control of a Wheelchair with Direct Steering

Wheelchair Kinematics
Kinematics in Wheelchair Control

Presentation Contents
Wheelchair Kinematics
Wheelchairs with Conventional Wheels
Wheelchair with Omnidirectional Wheels
Introduction to Wheelchair Dynamics
Introduction to Dynamic Walking
Dynamic Model of the Walking System
Decomposition of the Impulsive Motion
Numerical Results and Discussion
Mechanics of Wheelchairs
Biomechanics of Bipedal Systems

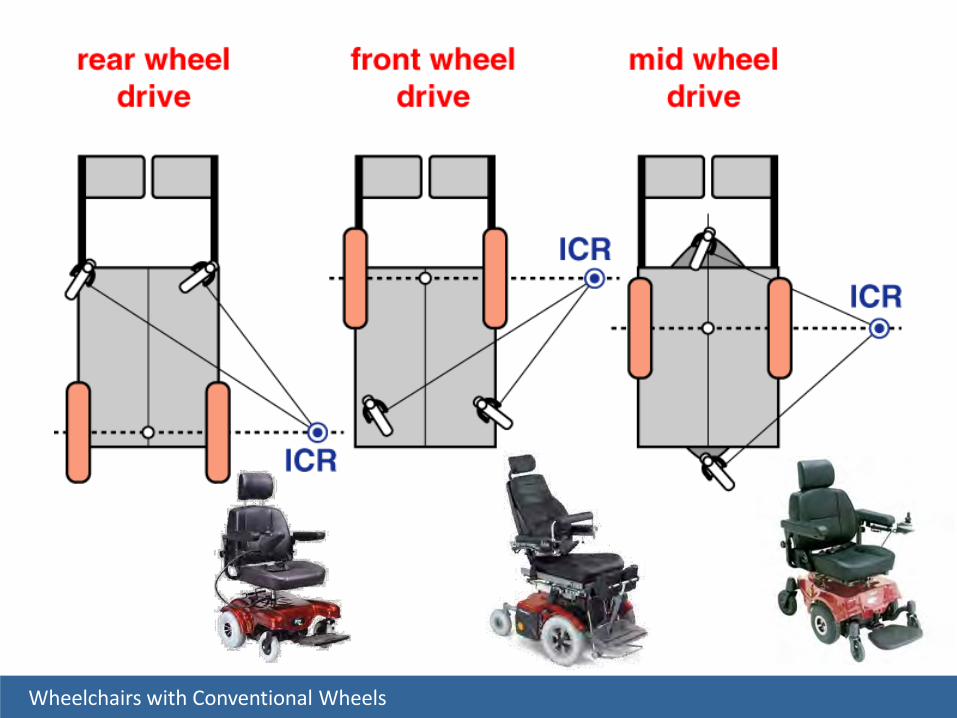
Wheelchairs with Conventional Wheels
Wheelchair with Differential Steering

Wheelchairs with Conventional Wheels
Control of a Wheelchair with Differential Steering

Wheelchairs with Conventional Wheels
Wheelchairs with Conventional Wheels

Wheelchairs with Conventional Wheels

Wheelchairs with Conventional Wheels

Wheelchairs with Conventional Wheels

Wheelchairs with Conventional Wheels

Wheelchairs with Conventional Wheels
Wheelchair with Tricycle Steering
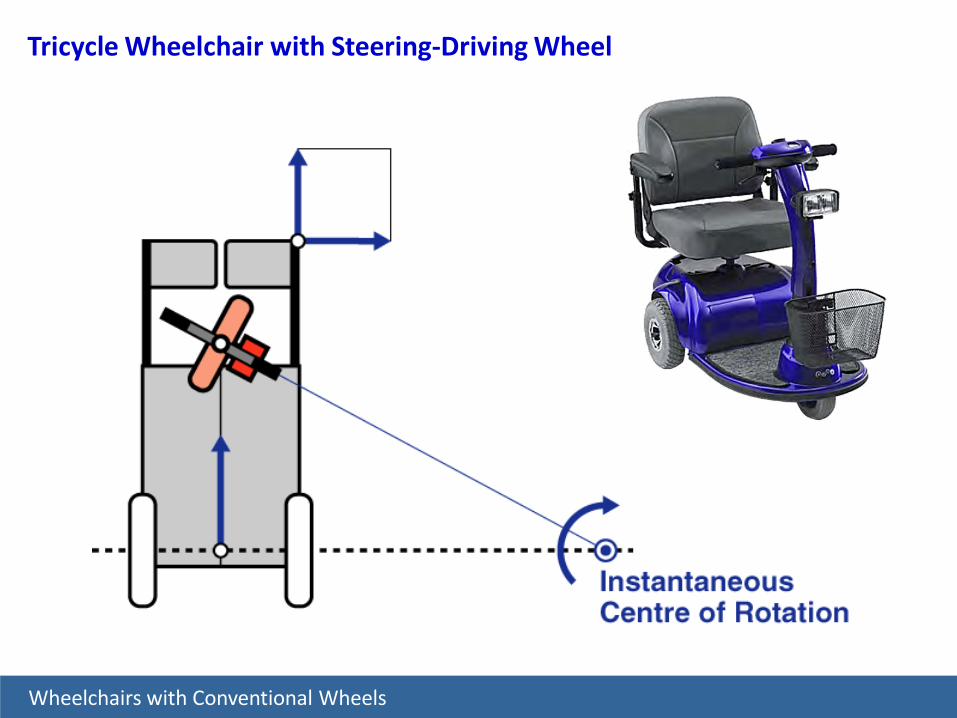
Wheelchairs with Conventional Wheels
Tricycle Wheelchair with Steering-Driving Wheel

Wheelchairs with Conventional Wheels
Tricycle Wheelchair with Steering-Driving Wheel

Wheelchairs with Conventional Wheels
Kinematics of a Tricycle Wheelchair

Wheelchairs with Conventional Wheels
Control of a Tricycle Wheelchair

Presentation Contents
Wheelchair Kinematics
Wheelchairs with Conventional Wheels
Wheelchair with Omnidirectional Wheels
Introduction to Wheelchair Dynamics
Introduction to Dynamic Walking
Dynamic Model of the Walking System
Decomposition of the Impulsive Motion
Numerical Results and Discussion
Mechanics of Wheelchairs
Biomechanics of Bipedal Systems

Wheelchairs with Omnidirectional Wheels
Mobility of the Centre of the Wheel

Wheelchairs with Omnidirectional Wheels
Omnidirectional Wheel with Rollers at 45º

Wheelchairs with Omnidirectional Wheels
Omnidirectional Wheel with Rollers at 90º

Wheelchairs with Omnidirectional Wheels
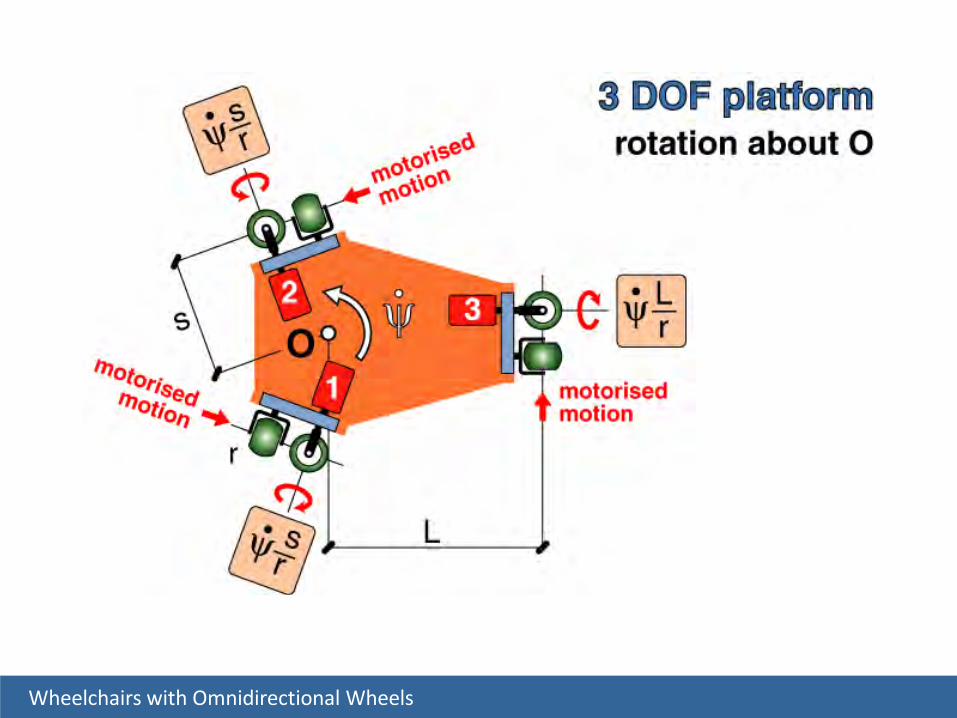
3-DOF Platform with 3 Omnidirectional Wheels

Wheelchairs with Omnidirectional Wheels
Omnidirectional Wheel with Spherical Rollers
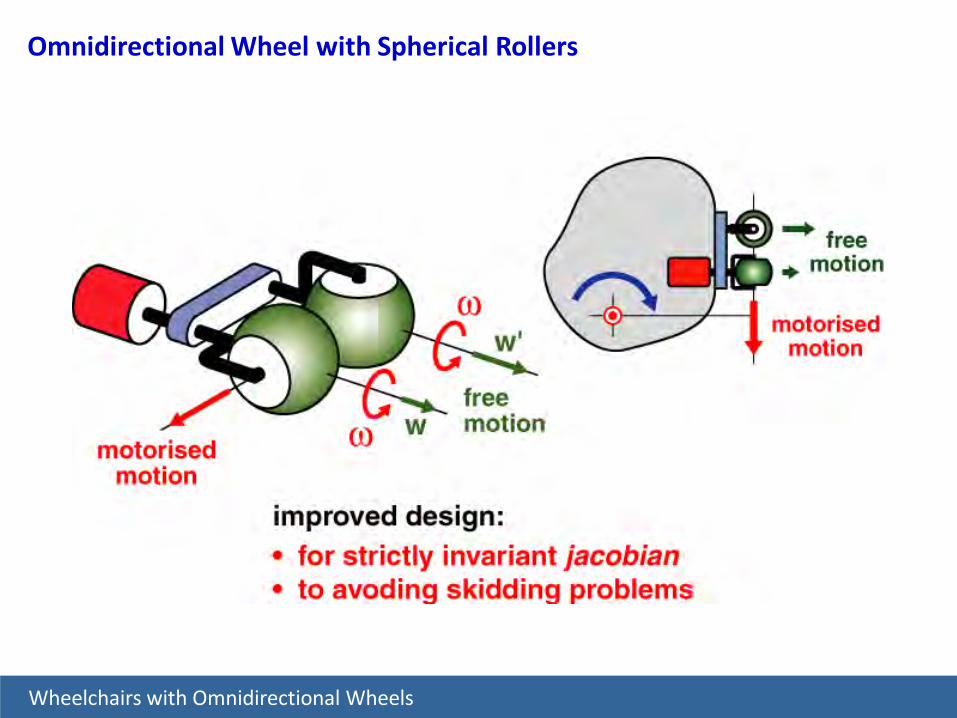
Wheelchairs with Omnidirectional Wheels
Omnidirectional Wheel with Spherical Rollers

Wheelchairs with Omnidirectional Wheels

Wheelchairs with Omnidirectional Wheels

LONGITUDINAL DOF
Wheelchairs with Omnidirectional Wheels

Wheelchairs with Omnidirectional Wheels

TRANSVERSAL DOF
Wheelchairs with Omnidirectional Wheels
Wheelchairs with Omnidirectional Wheels

ROTATIONAL DOF
Wheelchairs with Omnidirectional Wheels

Wheelchairs with Omnidirectional Wheels

Wheelchairs with Omnidirectional Wheels
Wheelchair with 3 Omnidirectional Wheels

Wheelchairs with Omnidirectional Wheels
Wheelchair with 3 Omnidirectional Wheels

Wheelchairs with Omnidirectional Wheels
Wheelchair Motion Modes

Wheelchairs with Omnidirectional Wheels
Control of the Motion Modes

Wheelchairs with Omnidirectional Wheels

Longitudinal motion
Rotation
Transverse motion
General motion
Wheelchairs with Omnidirectional Wheels

Presentation Contents
Wheelchair Kinematics
Wheelchairs with Conventional Wheels
Wheelchair with Omnidirectional Wheels
Introduction to Wheelchair Dynamics
Introduction to Dynamic Walking
Dynamic Model of the Walking System
Decomposition of the Impulsive Motion
Numerical Results and Discussion
Mechanics of Wheelchairs
Biomechanics of Bipedal Systems

Introduction to Wheelchair Dynamics
Equations of Motion: Method of Virtual Work

Introduction to Wheelchair Dynamics

Introduction to Wheelchair Dynamics
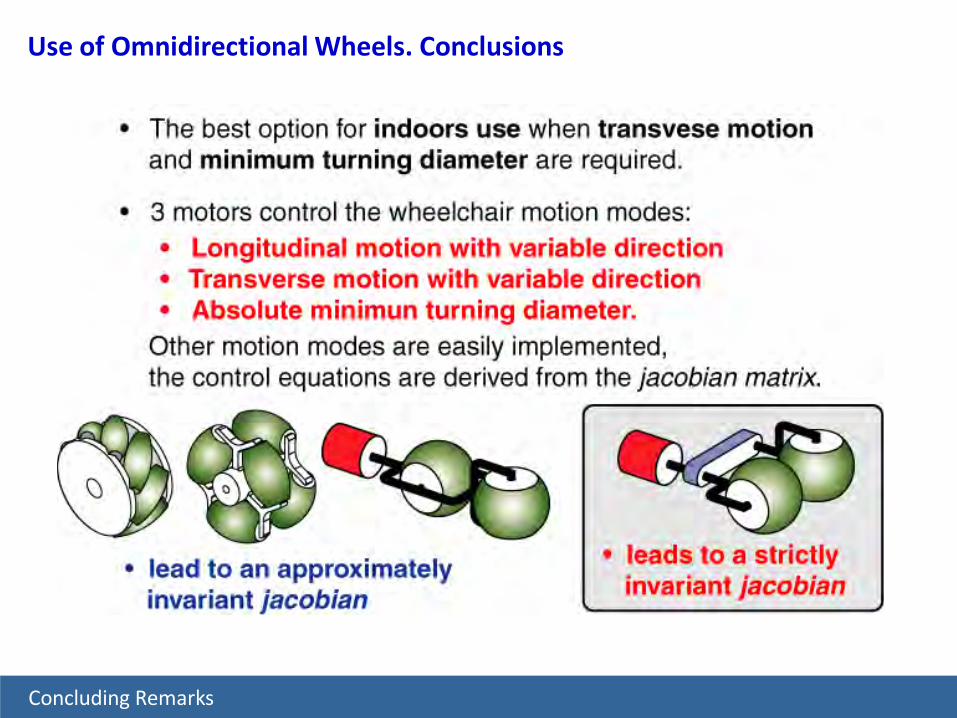
Concluding Remarks
Use of Omnidirectional Wheels. Conclusions

Josep Maria Font1,2 and József Kövecses1
Effects of Mass Distribution and Configuration on the Energetic Losses at Impacts of Bipedal Walking Systems
1: Department of Mechanical Engineering and Centre for Intelligent Machines
McGill University, Montréal, Canada
2: Department of Mechanical Engineering
Universitat Politècnica de Catalunya, Barcelona, Spain
Universidad Pública de Navarra
12 de Noviembre de 2008
Departamento de Ingeniería Mecánica,
Energética y de Materiales

Presentation Contents
Wheelchair Kinematics
Wheelchairs with Conventional Wheels
Wheelchair with Omnidirectional Wheels
Introduction to Wheelchair Dynamics
Introduction to Dynamic Walking
Dynamic Model of the Walking System
Decomposition of the Impulsive Motion
Numerical Results and Discussion
Mechanics of Wheelchairs
Biomechanics of Bipedal Systems

Dynamic Walking models are used to increase the understanding of the
principles underlying bipedal locomotion.
Starting point: Passive Dynamic Walking [McGeer 1990]
Dynamic Walking or ‘Limit Cycle Walking’
Introduction to Dynamic Walking
Passive walker with knees [Nagoya Institute of Technology]

Dynamic Walking or ‘Limit Cycle Walking’
Introduction to Dynamic Walking
Passive Walking resembles Human Walking [Nagoya Institute of Technology]
Dynamic Walking models are used to increase the understanding of the
principles underlying bipedal locomotion.
Starting point: Passive Dynamic Walking [McGeer 1990]

Actuated Dynamic Walkers have been recently developed
(e.g., robot Flame developed at TU Delft).
• Walk on level ground,
• Orbitally stable (limit cycle),
• Human-like motion,
• Energetically efficient.
Dynamic Walking or ‘Limit Cycle Walking’
Introduction to Dynamic Walking
Robot Flame [TU Delft]

Presentation Contents
Wheelchair Kinematics
Wheelchairs with Conventional Wheels
Wheelchair with Omnidirectional Wheels
Introduction to Wheelchair Dynamics
Introduction to Dynamic Walking
Dynamic Model of the Walking System
Decomposition of the Impulsive Motion
Numerical Results and Discussion
Mechanics of Wheelchairs
Biomechanics of Bipedal Systems

Phases of the Walking Motion
Dynamic Model of the Walking System
Single-support phase (Finite Motion) Heel Strike (Impulsive Motion)

Dynamic Model of the Walking System
( ) ( ) ( ), TA S S+ + = +M q q c q q u q f A λ
S =A q 0 Bilateral constraints
Single-support phase (Finite Motion) Heel Strike (Impulsive Motion)
Phases of the Walking Motion

Dynamic Model of the Walking System
( ) ( ) ( ), TA S S+ + = +M q q c q q u q f A λ
S =A q 0 Bilateral constraints
( ) T
I IT
++ −
−
∂= − = ∂
M q q Aq
λ
I+ =A q 0 Impulsive constraints
0n+S Sv += ≥B q
Single-support phase (Finite Motion) Heel Strike (Impulsive Motion)
Phases of the Walking Motion

Dynamic Model of the Walking System
( ) ( ) ( ), TA S S+ + = +M q q c q q u q f A λ
S =A q 0 Bilateral constraints
• Main cause of energy loss.
• Topology transition (some constraints are added and other become passive).
Single-support phase (Finite Motion) Heel Strike (Impulsive Motion)
Phases of the Walking Motion

Compass-Gait Biped with Upper Body
Dynamic Model of the Walking System
l = 0.8 m
lT = 0.4 m
a = b = 0.4 m
mB = 30 kg
• Generalized coordinates:
• Kinetic energy: ( ) ( )1,2
TT =q q q M q q
[ ]1 2 3 4 5, , , , Tq q q q q=q
2H
mm
µ = Lower bodymass distribution
Upper bodymass distribution
TT
H
mm
µ =

Presentation Contents
Wheelchair Kinematics
Wheelchairs with Conventional Wheels
Wheelchair with Omnidirectional Wheels
Introduction to Wheelchair Dynamics
Introduction to Dynamic Walking
Dynamic Model of the Walking System
Decomposition of the Impulsive Motion
Numerical Results and Discussion
Mechanics of Wheelchairs
Biomechanics of Bipedal Systems

Decomposition of the Impulsive Motion
• Impulse-momentum level dynamic equations:
( ) T
I IT
++ −
−
∂= − = ∂
M q q Aq
λ
• Impulsive constraints:
I+ =A q 0
AI : constraint Jacobian matrix. This matrix has different representations depending on which foot collides the ground.
(defines post-impact kinematic condition)
Heel Strike Dynamics
1 0 0 0 00 1 0 0 0R
=
A
( ) ( )( ) ( )
3 4 3 4 3
3 4 3 4 3
1 0 cos cos cos 00 1 sin sin sin 0L
l q l q q l q ql q l q q l q q
− − − = − − − −
A

Decomposition of the Dynamic Equations
The tangent space of the walking system can be decomposed to two
subspaces mutually orthogonal with respect to the mass metric of the
system [Kövecses 2003]
This is achieved based on the following projection operators
( ) 11 1T Tc I I I I
−− −=P M A A M A A
( ) 11 1T Ta I I I I
−− −= −P I M A A M A A
Space of Constrained Motion (SCM)
Space of Admissible Motion (SAM)
The generalized velocities and impulses can be decoupled as
T Tc a c a+ +f = P f P f = f f
c a c a+ +q = P q P q = v v
Decomposition of the Impulsive Motion

Decomposition of the Dynamic Equations
This gives a complete decoupling of the dynamic equations
Space of Constrained Motion (SCM)
Space of Admissible Motion (SAM)
( )
( )
c Tc c I I
c
aa a
a
T
T
+−
−
+−
−
∂ = − = ∂
∂ = − = ∂
+
+
M v v Av
M v v 0v
λ
1 12 2
T Tc a c c a aT T T= + = v Mv + v Mv
and the kinetic energy of the system
Solution: c =+v 0 and a a−=+v v a a
−= =+ +q v P q
Decomposition of the Impulsive Motion

( )3
12
2 sin
T Tc c
cL
S
TL l q
− −−
−ξ = =q P MP q
Kinetic Energy Decomposition at the Pre-Impact Time
Kinetic Energy of Admissible Motion
( ) ( )1 12 2
T Tc a c c a aT T T− − − − − − −= + = +v M v v M v
Kinetic Energy of Constrained Motion
LOSTat Heel Strike
STAYSin the system
Useful tool to analyze energetic losses at heel strike and gain insight into
the behaviour of dynamic walkers at impact.
Energy loss per unit distance:
Decomposition of the Impulsive Motion

Presentation Contents
Wheelchair Kinematics
Wheelchairs with Conventional Wheels
Wheelchair with Omnidirectional Wheels
Introduction to Wheelchair Dynamics
Introduction to Dynamic Walking
Dynamic Model of the Walking System
Decomposition of the Impulsive Motion
Numerical Results and Discussion
Mechanics of Wheelchairs
Biomechanics of Bipedal Systems

Simulation Results
Goal: Analyze the effect of the body configuration and mass distribution
on the dynamics of heel strike.
Results and Discussion

Effects of the Lower Body on the Foot Separation
Results and Discussion
Post-impact vel. (m/s)
• Concentrating the mass of the lower body at the hip increases the range of angles for which the trailing foot passively lifts up.
nSv+
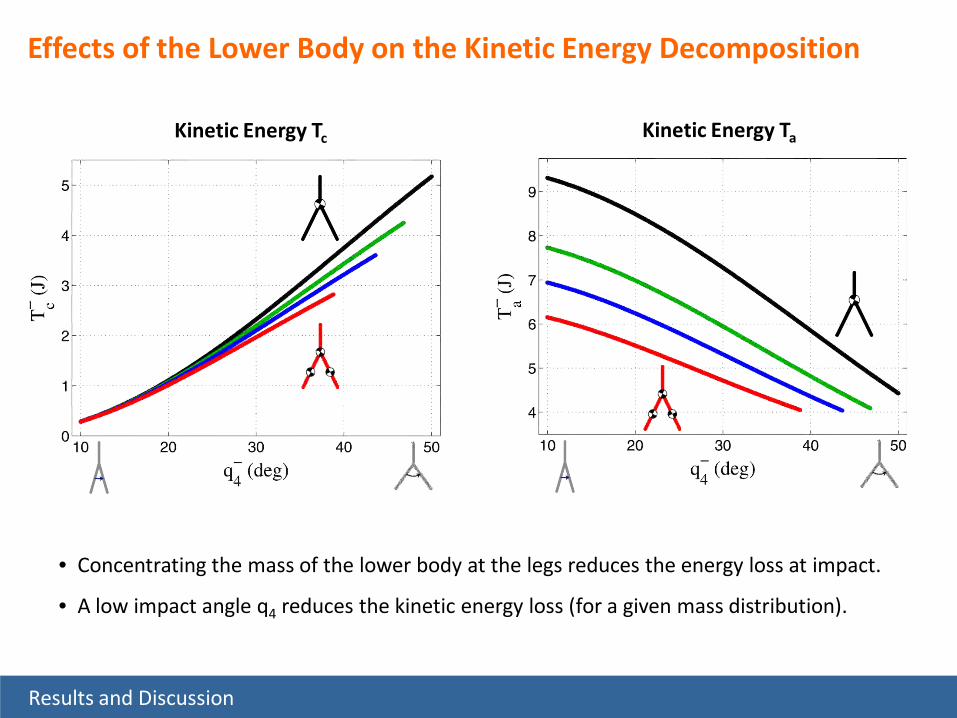
• Concentrating the mass of the lower body at the legs reduces the energy loss at impact.
• A low impact angle q4 reduces the kinetic energy loss (for a given mass distribution).
Kinetic Energy Tc Kinetic Energy Ta
Effects of the Lower Body on the Kinetic Energy Decomposition
Results and Discussion

Cost of transport ξL (J/m)
• Concentrating the mass of the lower body at the legs reduces the energy loss per unit distance.
• A low impact angle q4 (small steps) reduces the energy loss per unit distance.
Effects of the Lower Body on the Cost of Transport
Results and Discussion

Effects of the Upper Body on the Foot Separation
Results and Discussion
• Concentrating the mass of the upper body at the hip increases the post-impact normal velocity of the trailing foot.
Post-impact vel. (m/s) nSv+

Results and Discussion
• Concentrating the mass of the upper body at the top reduces the kinetic energy loss.
• A torso leaning forward (q5=0) improves the efficiency of the impact (for a given mass distribution).
Kinetic Energy Tc Kinetic Energy Ta
Effects of the Upper Body on the Kinetic Energy Decomposition

Conclusions
Conclusions
We presented a Lagrangian formulation applicable to the study of the
impulsive dynamics of heel strike.
We introduced a decomposition of the dynamic equations and the kinetic
energy to the spaces of constrained and admissible motions.
This is useful to analyze the kinetic energy redistribution and the velocity
change at heel strike.
A low inter-leg angle at heel strike and a torso leaning forward reduce the
energetic consumption per unit distance due to impacts.

Josep Maria Font [email protected]
Mecánica de Sistemas Multicuerpo:Análisis de la Silla de Ruedas “Triesférica” y Dinámica de la Marcha de Sistemas Bípedos
Universidad Pública de Navarra
12 de Noviembre de 2008
Departamento de Ingeniería Mecánica,
Energética y de Materiales
Departamentode Ingeniería Mecánica
McGill University





























