Embed Size (px)
Citation preview

Faculdade de Engenharia da Universidade do Porto
Análise de sensibilidade do dimensionamento de um STATCOM para garantir capacidade de sobrevivência a cavas de tensão de parques
eólicos com máquinas de indução de velocidade fixa
António José Rocha Afonso
Versão Final
Dissertação realizada no âmbito do Mestrado Integrado em Engenharia Eletrotécnica e de Computadores
Major Energia
Orientador: Prof. Doutora Maria Helena Osório Pestana de Vasconcelos
Julho 2014


ii
© António Afonso, 2014

iii
Resumo
A ligação de grandes quantidades de potência eólica à rede elétrica tem proporcionado
vários desafios aos operadores da mesma, bem como aos construtores de tecnologia que
compõem os parques eólicos. Relativamente ao operador de rede, o aumento da penetração
de geração de energia eólica tem provocado problemas de estabilidade, principalmente quando
ocorre um curto-circuito e os parques eólicos são retirados de serviço por não possuírem
capacidade de sobrevivência a cavas de tensão.
Para evitar ainda mais problemas de estabilidade, os operadores de rede criaram os códigos
de rede e exigiram às novas instalações eólicas o cumprimento dos mesmos para se poderem
ligar à rede. Contudo, as instalações que já se encontravam em serviço antes da implementação
dos códigos de rede, não são obrigados a cumprirem estes regulamentos, saindo de serviço
sempre que a tensão viole o valor mínimo de tensão definido, normalmente 0,85 p.u..
As instalações eólicas instaladas antes da implementação dos códigos de rede eram na
grande maioria compostos por aerogeradores com geradores de indução de rotor em gaiola de
esquilo devido à sua simplicidade, robustez e custos económicos. Como esta tecnologia não
possui nenhum tipo de conversor de potência, uma possível solução para lhes permitir manter
a tensão acima do valor mínimo suportado é através de dispositivos como o STATCOM, que
possuem a capacidade de injetar ou absorver potência reativa no ponto de ligação de uma
forma dinâmica. Desta forma, este tipo de tecnologia com o auxílio do STATCOM pode conseguir
suportar um curto-circuito e contribuir para a estabilidade do sistema elétrico de energia.
Esta dissertação foca-se na análise de influência que as caraterísticas elétricas do local de
instalação do STATCOM têm no dimensionamento desse STATCOM, para garantir a capacidade
de sobrevivência a cavas de tensão de parques eólicos com máquinas de indução de velocidade
fixa. Realiza-se também um estudo detalhado da eficácia do STATCOM para atenuar as cavas
de tensão provocadas por defeito na rede elétrica. Analisa-se ainda a viabilidade de se obter
uma relação matemática entre a potência necessária do STATCOM e as caraterísticas de
instalação estudadas.
Keywords: STATCOM, gerador de indução de velocidade fixa, capacidade de sobrevivência a
cavas de tensão, parques eólicos

iv

v
Abstract
The binding of large amounts of wind power to the grid has provided many challenges to
its operators, as well as to manufacturers of technologies that comprise the wind farms.
Regarding the network operator, the increased penetration of wind power generation has
caused stability problems, especially when a short circuit and wind farms are removed from
service for not having the ability to survive voltage dips occur.
To avoid further problems of stability, network operators have created the network codes
and demanded the new wind installations compliance with them to be able to connect to the
network. However, the facilities that were already in operation before the implementation of
the network codes are not required to comply with these regulations, out of service whenever
the voltage violates the minimum set voltage, typically 0.85 p.u.
Wind turbines installed prior to the implementation of the network codes were in the great
majority compounds for wind turbines with induction generators rotor squirrel cage due to its
simplicity, robustness and economic costs. As this technology does not have any power
converter, a possible solution to allow them to keep the voltage above the minimum supported
value is through devices such as STATCOM, which have the ability to inject or absorb reactive
power at the connection point of a dynamically. Thus, this type of technology with the aid of
the STATCOM may be able to withstand a short circuit, and contribute to the stability of the
electrical power system.
This thesis focuses on the analysis of the electrical characteristics that influence the
location of the STATCOM in the design that this facility has on that STATCOM, to ensure the
survivability of the armhole wind farm tension with conventional induction machines. Also
carried out a detailed study of the effectiveness of the STATCOM to mitigate voltage dips
caused by defect in the electrical network. It analyses also the feasibility of obtaining a
mathematical relationship between the required power STATCOM and the installation
characteristics studied.
Keywords: STATCOM, fixed speed induction generators, fault ride through, wind farms

vi

vii

viii
Agradecimentos
Em primeiro lugar quero agradecer a toda minha família, em especial aos meus pais e ao
meu irmão, pela educação que me deram e por todo o carinho e apoio que sempre me
transmitiram.
Um agradecimento especial à minha orientadora, a Professora Doutora Maria Helena
Vasconcelos, por toda a disponibilidade, paciência e pelos valiosos conhecimentos transmitidos
durante a realização desta dissertação.
Queria também agradecer a todos os meus amigos por todo o companheirismo, em especial
aos que dividiram casa comigo durante os anos de faculdade.
A todos aqueles que de uma forma direta ou indireta contribuíram para a realização desta
dissertação.

ix

x
Índice
Resumo .......................................................................................... iii
Abstract ........................................................................................... v
Agradecimentos .............................................................................. viii
Índice .............................................................................................. x
Lista de Figuras ............................................................................... xii
Lista de Tabelas ............................................................................... xv
Abreviaturas e Símbolos .................................................................... xvii
1 Introdução ...................................................................................1
1.1 Objetivos .......................................................................................... 4
1.2 Organização da Dissertação .................................................................... 4
2 Estado da Arte ..............................................................................7
2.1 Introdução ........................................................................................ 7
2.2 Principais Tecnologias de Aerogeradores .................................................... 7 2.2.1 Aerogeradores com Gerador de Indução de rotor em gaiola de esquilo ............. 9 2.2.2 Aerogeradores com Gerador de Indução Duplamente Alimentados.................. 10 2.2.3 Aerogeradores com Gerador Síncrono de Ímanes Permanentes ...................... 12 2.2.4 Outras Tecnologias de Aerogeradores .................................................... 13
2.3 Comportamento do Aerogerador com Gerador de Indução de rotor em gaiola de esquilo em caso de Curto-Circuitos ................................................................... 13
2.4 Requisitos técnicos de ligação à rede elétrica ............................................ 14 2.4.1 Desvio de frequência ......................................................................... 15 2.4.2 Capacidade de sobrevivência a cavas de tensão provocadas por defeitos ......... 16 2.4.3 Fornecimento de corrente reativa durante cavas de tensão ......................... 17
2.5 FACTS ............................................................................................. 18 2.5.1 Dispositivo SVC ................................................................................ 20 2.5.2 Dispositivo STATCOM ......................................................................... 24 2.5.3 Comparação entre SVC e STATCOM ....................................................... 26
2.6 Conclusões ....................................................................................... 27
xi
3 Modelização do Sistema ................................................................. 29
3.1 Introdução ....................................................................................... 29
3.2 Modelo do Sistema Elétrico .................................................................. 29
3.3 Modelo do Gerador de Indução de rotor em gaiola de esquilo ......................... 30
3.4 Modelo do STATCOM ........................................................................... 33 3.4.1 Princípio de funcionamento ................................................................ 35 3.4.2 Funcionamento do STATCOM quando aplicado a um sistema de energia .......... 37
3.5 Conclusões ...................................................................................... 39
4 Caso de Estudo e Metodologia .......................................................... 41
4.1 Introdução ....................................................................................... 41
4.2 Rede de Estudo ................................................................................. 41
4.3 Metodologia Aplicada .......................................................................... 43
4.4 Conclusões ...................................................................................... 49
5 Resultados ................................................................................. 51
5.1 Rede de Estudo ................................................................................. 51 5.1.1 Situação de Estudo 1 ........................................................................ 51 5.1.2 Situação de Estudo 2 ........................................................................ 64 5.1.3 Situação de Estudo 3 ........................................................................ 71
5.2 Viabilidade de relação matemática ......................................................... 76
5.3 Conclusões ...................................................................................... 83
6 Conclusões e Perspetivas de Trabalho Futuro ...................................... 85
Referências ..................................................................................... 87
Anexo A ......................................................................................... 90

xii
Lista de Figuras
Figura 1.1 – Crescimento da capacidade geradora acumulada dos parques eólicos mundiais e europeus [1] ........................................................................................... 2
Figura 1.2 - Crescimento da capacidade geradora acumulada dos parques eólicos portugueses [1] .......................................................................................... 2
Figura 2.1 – Princípio de funcionamento de um aerogerador [9] ..................................... 8
Figura 2.2 – Esquema do aerogerador com gerador de indução de rotor em gaiola de esquilo ........................................................................................................... 10
Figura 2.3 – Esquema do aerogerador com gerador de indução duplamente alimentado ...... 11
Figura 2.4 – Esquema do aerogerador com gerador síncrono ........................................ 12
Figura 2.5 – Curva tensão-tempo da capacidade exigidas às instalações de produção eólica para suportarem cavas de tensão [22], [23] ..................................................... 16
Figura 2.6 – Curva de fornecimento de potência reativa pelas instalações de produção eólica durante cavas de tensão [22], [23] ................................................................ 17
Figura 2.7 – Configuração possível de um SVC[8] ...................................................... 20
Figura 2.8 – Esquema trifásico de um TCR .............................................................. 21
Figura 2.9 – Tensão e corrente numa fase de um TCR, em função do ângulo de disparo dos tirístores ................................................................................................ 21
Figura 2.10 – Esquema trifásico de um TSC ............................................................. 22
Figura 2.11 – Tensão instantânea, tensão no condensador e corrente numa fase de um TSC . 23
Figura 2.12 – Caraterística tensão-corrente do SVC[8] ............................................... 23
Figura 2.13 – Configuração típica de um STATCOM[8] ................................................ 24
Figura 2.14 – Topologia de um conversor fonte de tensão com comutação forçada (STATCOM)[27] ........................................................................................ 24
Figura 2.15 - Caraterística tensão-corrente do STATCOM[28] ....................................... 25
Figura 3.1 - Caraterística típica torque-velocidade da máquina de indução convencional .... 30

xiii
Figura 3.2 – Caraterística potência reativa-deslizamento da máquina de indução convencional ........................................................................................... 31
Figura 3.3 – Circuito equivalente da máquina de indução de rotor em gaiola de esquilo ...... 31
Figura 3.4 – Diagrama de blocos do modelo simplificado do STATCOM com limites non-windup .................................................................................................. 33
Figura 3.5 – Esquema unifilar do modelo simplificado do STATCOM ................................ 34
Figura 3.6 – Caraterística de funcionamento do modelo simplificado do STATCOM ............. 35
Figura 3.7 – Diagrama do STATCOM ....................................................................... 36
Figura 3.8 – Esquema unifilar do equivalente de Thevenin........................................... 37
Figura 3.9 – Caraterística de funcionamento da rede (tensão/corrente reativa) ................ 37
Figura 3.10 – Efeito da variação da tensão na rede [32] .............................................. 38
Figura 3.11 – Efeito da variação da reactância equivalente na rede [32] ......................... 38
Figura 3.12 – Modo de operação do STATCOM para diferentes condições da rede [32] ......... 39
Figura 4.1 – Esquema unifilar da rede de estudo ....................................................... 41
Figura 4.2 – Posição 1 de ligação do STATCOM à rede de estudo ................................... 44
Figura 4.3 - Posição 2 de ligação do STATCOM à rede de estudo ................................... 44
Figura 4.4 – Esquema das simulações realizadas na situação de estudo 1 ......................... 46
Figura 4.5 – Esquema das simulações realizadas na situação de estudo 2 ......................... 47
Figura 4.6 - Esquema das simulações realizadas na situação de estudo 3 ......................... 48
Figura 5.1 – Evolução temporal da tensão da perturbação de 20% .................................. 52
Figura 5.2 – Comportamento do deslizamento do gerador de indução convencional para cava de tensão 20%, comprimento da linha 100 km e STATCOM posição 2 ................. 52
Figura 5.3 – Comportamento da tensão no barramento de 690 V para cava de tensão 20%, comprimento da linha 100 km e STATCOM posição 2 ........................................... 53
Figura 5.4 – Comportamento da potência reativa no barramento de 690 V para cava de tensão 20%, comprimento da linha 100 km e STATCOM posição 2............................ 54
Figura 5.5 – Comportamento da potência reativa no gerador de indução para cava de tensão 20%, comprimento da linha 100 km e STATCOM posição 2 ..................................... 54
Figura 5.6 – Comportamento da potência reativa gerada pelo STATCOM de 5 Mvar ............. 55
Figura 5.7 – Comportamento da corrente do STATCOM de 5 Mvar .................................. 55
Figura 5.8 - Evolução temporal da tensão da perturbação de 40% .................................. 56
Figura 5.9 – Comportamento do deslizamento do gerador de indução convencional para cava de tensão 40%, comprimento da linha 10 km e STATCOM posição 1 ................... 57

xiv
Figura 5.10 - Comportamento da tensão no barramento de 690 V para cava de tensão 40%, comprimento da linha 10 km e STATCOM posição 1 ............................................ 57
Figura 5.11 – Evolução da potência necessária do STATCOM vs Cava de Tensão nas diferentes posições para o comprimento de linha igual a 10 km .......................................... 58
Figura 5.12 - Evolução da potência necessária do STATCOM vs Cava de Tensão nas diferentes posições para o comprimento de linha igual a 100 km ......................................... 59
Figura 5.13 - Evolução da potência necessária do STATCOM vs Cava de Tensão na posição 1 para os diferentes comprimentos de linha ....................................................... 59
Figura 5.14 - Evolução da potência necessária do STATCOM vs Cava de Tensão na posição 2 para os diferentes comprimentos de linha ....................................................... 60
Figura 5.15 – Comportamento da tensão no barramento de 690 V para cava de tensão 20%, comprimento da linha 100 km, potência curto-circuito 500 MVA e STATCOM posição 2 ........................................................................................................... 64
Figura 5.16 – Comportamento da tensão no barramento de 690 V para cava de tensão 30%, comprimento da linha 10 km, potência curto-circuito 7600 MVA e STATCOM posição 1 ........................................................................................................... 65
Figura 5.17 - Evolução da potência necessária do STATCOM vs Cava de Tensão para as diferentes potências de curto-circuito da rede, na posição 1 e linha de 10 km .......... 66
Figura 5.18 - Evolução da potência necessária do STATCOM vs Cava de Tensão para as diferentes potências de curto-circuito da rede, na posição 2 e linha de 10 km .......... 66
Figura 5.19 - Comportamento da tensão no barramento de 690 V para cava de tensão 20%, comprimento da linha 100 km, potência nominal do parque eólico 40 MW e STATCOM posição 2 ............................................................................................... 71
Figura 5.20 - Comportamento da tensão no barramento de 690 V para cava de tensão 30%, comprimento da linha 10 km, potência nominal do parque eólico 10 MW e STATCOM posição 2 ............................................................................................... 72
Figura 5.21 - Evolução da potência necessária do STATCOM vs Cava de Tensão para as diferentes potências nominais do parque eólico, na posição 2 e linha de 25 km ......... 72
Figura 5.22 – Esquema unifilar considerando Zmontente e Zjusante para STATCOM na posição 1 ............................................................................................... 76
Figura 5.23 – Esquema unifilar considerando Zmontente e Zjusante para STATCOM na posição 2 ............................................................................................... 76
Figura 5.24 – Evolução da potência do STATCOM em função da razão entre potência montante e jusante .................................................................................. 82
Figura 5.25 - Evolução da potência do STATCOM em função da razão entre potência montante e jusante considerando um valor fixo de potência montante (356,24 Mvar) .. 82
Figura 5.26 - Evolução da potência do STATCOM em função da razão entre potência montante e jusante considerando um valor fixo de potência jusante (78,80 Mvar) ...... 83

xv
Lista de Tabelas
Tabela 4.1 – Dados do Equivalente da Rede............................................................. 42
Tabela 4.2 – Dados do Transformador 220kV/60kV .................................................... 42
Tabela 4.3 – Dados do Transformador 60kV/690V...................................................... 42
Tabela 4.4 – Dados da Linha ............................................................................... 42
Tabela 4.5 – Dados do Gerador de Indução Convencional ............................................ 42
Tabela 4.6 – Dados do modelo Simplificado do STATCOM ............................................ 43
Tabela 4.7 – Valores considerados para o parque eólico, bateria de condensadores e transformador .......................................................................................... 44
Tabela 4.8 – Valores considerados para o comprimento da linha ................................... 45
Tabela 5.1 – Tabela resumo de todas as simulações realizadas na Situação de Estudo 1 ....... 62
Tabela 5.2 - Tabela resumo de todas as simulações realizadas para a posição 1 na Situação de Estudo 2 ............................................................................................. 68
Tabela 5.3 - Tabela resumo de todas as simulações realizadas para a posição 2 na Situação de Estudo 2 ............................................................................................. 69
Tabela 5.4 - Tabela resumo de todas as simulações realizadas na Situação de Estudo 3 ....... 74
Tabela 5.5 – Valores de impedância da linha ........................................................... 77
Tabela 5.6 - Valores da impedância equivalente da rede ............................................ 78
Tabela 5.7 - Valores da impedância dos transformadores ............................................ 78
Tabela 5.8 – Valores da impedância do gerador de indução ......................................... 79
Tabela 5.9 – Valores relativos à impedância a montante e jusante para a cava de tensão de 0,25 p.u. ................................................................................................ 80

xvi

xvii
Abreviaturas e Símbolos
Lista de abreviaturas
AC Alternating Current
CC Corrente Contínua
DC Direct Current
DFIG Double Fed Induction Generator
FACTS Flexible AC Transmission System
FRT Fault Ride-Through
GTO Gate Turn-Off Thyristors
IGBT Insulated Gate Bipolar Transistor
OR Operadores de Rede
PMSG Permanent Magnet Synchronous Generator
PWM Pulse Width Modulation
SEE Sistema de Elétrico de Energia
SSSS Static Synchronous Series Source
STATCOM Static Synchronous Compensator
SVC Static Var Compensator
TCPAR Thyristor Controlled Phase Angle Regulator
TCR Thyristor Controlled Reactor
TCS Thyristor Switched Capacitor
TCSC Thyristor Controlled Series Capacitor
UPFC Unified Power Flow Controller
VSC Voltage-Sourced Converter

xviii

1 Capítulo 1
Introdução
O processo de desenvolvimento tecnológico pelo qual o mundo passa atualmente
proporciona a expansão de diversos setores da sociedade como a indústria, o comércio e a
prestação de serviço, provocando que a energia elétrica assuma um papel fundamental no
desenvolvimento de qualquer país.
Hoje em dia, os combustíveis fósseis como o petróleo, carvão e gás natural, ainda são a
fonte mais utilizada pelas centrais elétricas para geração de energia elétrica. No entanto, uma
consciencialização global para os problemas ambientais, aliada ao aumento dos preços dos
combustíveis fósseis e uma crescente necessidade de energia, desafiou a necessidade de
procura de novas fontes de energia, mais limpas e mais baratas.
A necessidade atual de procurar uma redução da dependência dos combustíveis fósseis e
da redução dos problemas ambientais associados, estimulou a utilização e investimento em
tecnologias que exploram energias provenientes de fontes renováveis como a água, o sol, o
vento, entre outras, que se caraterizam por serem fontes inesgotáveis.
Outro dos fatores importantes e que tem contribuído de forma bastante significativa para
a aplicação e desenvolvimento de energias renováveis são as políticas internacionais
implementadas, por exemplo, o protocolo de Quioto que define critérios relativamente à
redução das emissões de CO2.
Neste contexto, a energia eólica tem-se destacado dentro de um conjunto de energias
renováveis devido à sua maturidade tecnológica para a geração de eletricidade. Nos últimos
anos, como se pode constatar na Figura 1.1, observou-se um crescimento acentuado da
potência instalada em parques eólicos por todo o Mundo. Prova deste crescimento é que em
2007 havia aproximadamente 100 GW de potência eólica instalada e passados 6 anos, ou seja
em 2013, a potência eólica instalada aumentou para mais de 300 GW, correspondendo a um
crescimento de mais de 200%.

2 Introdução
Figura 1.1 – Crescimento da capacidade geradora acumulada dos parques eólicos mundiais e europeus [1]
Analisando a Figura 1.2, relativa à situação portuguesa ao longo dos últimos anos,
facilmente se percebe que tal como pelo Mundo, em Portugal houve um elevado aumento de
potência eólica instalada.
Figura 1.2 - Crescimento da capacidade geradora acumulada dos parques eólicos portugueses [1]
No entanto, o crescimento da potência eólica instalada ligada ao sistema elétrico provocou
novos desafios relativamente à estabilidade do sistema. Devido ao aumento acentuado da
injeção de energia eólica, os operadores de rede foram obrigados a exigir requisitos técnicos
aos produtores eólicos de modo a garantir a segurança de operação da rede elétrica[2],[3].
Entre estes requisitos técnicos destacam-se a capacidade de sobrevivência a cavas de tensão,

3
denominado na literatura anglo-saxónica por Fault Ride-Through (FRT), que define que os
geradores eólicos tem de ter a capacidade de sobreviverem a cavas de tensão provocadas por
curto-circuitos. Outro dos requisitos exigidos aos produtores eólicos é a capacidade de injeção
de corrente reativa durante e após a ocorrência do defeito para ajudarem no suporte de tensão
durante o defeito[3],[4].
Em Portugal, desde a entrada em serviço dos primeiros parques eólicos até à entrada em
vigor dos regulamentos que impõe os requisitos técnicos passaram-se mais de 10 anos,
sucedendo que os parques eólicos instalados neste período de tempo obtiveram licença de
ligação à rede elétrica sem que lhes tenha sido exigido qualquer requisito técnico
correspondente a suporte de cavas de tensão. Nestas condições de ligação à rede elétrica
portuguesa é estimado que estejam mais de 3000 MW[5].
Sucede que os aerogeradores instalados nestas condições estavam unicamente focados em
proteger o aerogerador e não tinham em consideração os impactos na operação do sistema de
energia. Em caso de perturbação, estes parques eólicos, que têm o relé de mínimo de tensão
regulado para valores de tensão relativamente alto (entre 0,8 e 0,85 p.u), eram desligados da
rede de forma a protegerem os aerogeradores, pois não era requerido que contribuíssem para
a estabilidade do sistema. O relé de mínimo de tensão é definido de acordo com as instruções
do fabricante relativamente a máquina, situando-se num valor entre 0,8 p.u. e 0,85 p.u.. Nesta
dissertação considera-se 0,85 p.u. o valor mínimo de tensão.
Como a injeção de potência proveniente de parques eólicos aumentou significativamente,
o operador da rede começou a sentir diferentes problemas entre os quais se destaca problemas
de estabilidade. Estes problemas na rede conduziram a uma reavaliação dos regulamentos da
rede relativamente à ligação dos parques eólicos à mesma. Os requisitos de capacidade de
sobrevivência a cavas de tensão e de capacidade de injeção de corrente reativa durante e após
a ocorrência do defeito surgiram desta reavaliação.
Com a imposição destes novos requisitos, os aerogeradores que até aqui eram constituídos
por geradores de indução de rotor em gaiola de esquilo (de velocidade fixa) começaram a ser
substituídos por novas tecnologias pois estes deixaram de cumprir com os requisitos impostos.
Destas novas tecnologias destacam-se o gerador de indução duplamente alimentado e o gerador
síncrono de ímanes permanentes.
No entanto, nos dias de hoje, os parques eólicos baseados em geradores de indução de
rotor em gaiola de esquilo ainda representam a uma percentagem significativa da total
capacidade de energia eólica instalada [6], [7]. Tendo em conta a elevada produção de energia
eólica, a rede elétrica encontra-se com menos capacidade de suprir a energia reativa que os
parques eólicos de rotor em gaiola de esquilo absorvem durante um defeito, comprometendo
a recuperação da tensão e a estabilidade do sistema elétrico de energia.
Para melhorar o desempenho destes parques eólicos, de modo a não saírem tão facilmente
de serviço sempre que surge um defeito na rede, poderão ser instalados à saída dos parques

4 Introdução
eólicos dispositivos FACTS (Flexible AC Transmission System), que possuem capacidade de
injeção de potência reativa a fim de proporcionar um melhor comportamento dinâmico aos
parques eólicos com geradores de indução de rotor em gaiola de esquilo. Dos dispositivos FACTS
destacam-se pelo seu desempenho o Static Synchronous Compensator (STATCOM) e o Static Var
Compensator (SVC). De entre estes dois dispositivos, optou-se pela escolha do STATCOM, pois
este é mais eficaz que o SVC, quando ocorre uma cava de tensão e é necessário injetar potência
reativa de modo a suportar a tensão [8].
Para o dimensionamento adequado dos dispositivos STATCOM, de modo a garantir que sejam
capazes de evitar que os parques eólicos com geradores de indução convencional saiam de
serviço sempre que ocorre um defeito, existe um conjunto de caraterísticas elétricas do local
de instalação, como a potência de curto-circuito da rede na subestação que faz a ligação do
parque à rede de transporte, o comprimento da linha que liga a subestação ao posto de
transformação, potência instalada no parque, entre outros, que influenciam esse mesmo
dimensionamento. Foi este último ponto que norteou o trabalho desenvolvido nesta
dissertação.
1.1 Objetivos
A dissertação desenvolvida tem como objetivos principais:
Compreender as vantagens do uso do STATCOM para garantir que não ocorra saída de
serviço dos parques eólicos constituídos por geradores de indução convencionais,
perante a ocorrência de cavas de tensão na rede de transmissão;
Estudar de que modo as caraterísticas elétricas do local de instalação de um STATCOM
influenciam a potência necessária do STATCOM, para que este seja capaz de fornecer
suporte de tensão adequado a parques eólicos constituído por geradores de indução
convencional, durante a ocorrência de cavas de tensão na rede de transmissão;
Analisar a viabilidade de se obter uma relação matemática entre a potência
necessária do STATCOM e as caraterísticas elétricas do local de instalação estudados.
1.2 Organização da Dissertação
Esta dissertação é constituída por 6 capítulos, a que se acrescentam as referências e os
anexos.
No capítulo 1 encontra-se a introdução do trabalho, onde se realiza o enquadramento da
dissertação desenvolvida, os objetivos propostos e a estruturação deste mesmo documento.
O capítulo 2 aborda o estado da arte no que respeita às tecnologias dos aerogeradores mais
utilizadas em parques eólicos, detalhando o comportamento do aerogerador constituído por
gerador de indução de rotor em gaiola de esquilo perante curto-circuitos. Apresenta-se os
regulamentos existentes que os novos parques eólicos são obrigados a cumprir. São ainda

5
apresentados os dispositivos FACTS e analisados mais pormenorizadamente os dispositivos
paralelo, STATCOM e SVC.
No capítulo 3 expõe-se a modelização dos elementos utilizados na rede de estudo desta
dissertação, dando-se mais ênfase ao modelo do gerador de indução em rotor de gaiola de
esquilo e ao dispositivo STATCOM.
O capítulo 4 é dedicado à apresentação do caso de estudo bem como da metodologia
aplicada ao mesmo, de modo a perceber como os diferentes elementos influenciam o
dimensionamento do STATCOM.
No capítulo 5 serão apresentados os resultados obtidos da aplicação da metodologia
simulada em ambiente MATLAB/Simulink. Também será apresentado um estudo sobre a
existência de viabilidade de relação matemática entre a potência necessária do STATCOM e as
caraterísticas elétricas do local de instalação.
No capítulo 6 são apresentadas as conclusões finais do trabalho desenvolvido e são
sugeridas algumas propostas a desenvolver no futuro.


2 Capítulo 2
Estado da Arte
2.1 Introdução
O presente capítulo tem como objetivo apresentar a informação mais relevante da pesquisa
bibliografia de modo a contextualizar o trabalho desenvolvido.
Este capítulo inicia-se, na secção 2.2, abordando e caraterizando as principais tecnologias
de aerogeradores existentes para converter a energia do vento em energia elétrica. Segue-se,
na secção 2.3, uma análise detalhada do comportamento perante cavas de tensão do
aerogerador com gerador de indução de rotor em gaiola de esquilo.
De seguida, na secção 2.4, analisam-se os requisitos técnicos de ligação à rede elétrica
portuguesa, dando-se especial ênfase aos requisitos requeridos durante as perturbações. Entre
estes requisitos destaca-se a capacidade de sobrevivência a cavas de tensão provocadas por
defeitos.
Por fim, na secção 2.5, apresenta-se os equipamentos FACTS, destacando-se os dispositivos
paralelo, o SVC e o STACOM. Estes dispositivos caraterizam-se pela sua capacidade de injeção
de potência reativa, auxiliando os parques eólicos a suportar a tensão aos seus terminais. De
modo a perceber qual dos dispositivos paralelo oferece melhor estabilidade do sistema durante
e depois das perturbações efetua-se uma comparação entre os dois dispositivos.
2.2 Principais Tecnologias de Aerogeradores
O princípio de funcionamento de um aerogerador consiste na transformação de parte da
energia cinética do vento em energia mecânica através do rotor. Por sua vez, a energia
mecânica é transformada em energia elétrica através de um gerador elétrico. O princípio de
funcionamento é apresentado na Figura 2.1.

8 Estado da Arte
Figura 2.1 – Princípio de funcionamento de um aerogerador [9]
Este processo embora pareça bastante simples, é um sistema complexo que, para ser
compreendido, é necessário aplicar conhecimentos de diferentes áreas, como engenharia
elétrica, mecânica, de controlo e aerodinâmica.
Antes de abordar os diferentes tipos de aerogeradores, será feita referência aos sistemas
de controlo da velocidade das turbinas eólicas mais utilizados. Este tipo de sistemas permite
controlar a energia cinética do vento que é transmitida ao rotor da máquina de modo a evitar
danos no sistema mecânico. Este controlo pode ser do tipo:
pitch – consiste em mudar o ângulo de ataque das pás de forma a reduzir a potência
extraída do vento, sempre que a potência nominal do gerador é ultrapassada, devido a um
aumento do vento. Neste tipo de controlo, os ângulos das pás podem variar entre 0º e 90º;
stall–ativo – tal como o ângulo pitch, consiste em mudar o ângulo de ataque das pás
com a mesma finalidade, sempre que a potência nominal do gerador é ultrapassada, mas neste
tipo de controlo movem-se as pás na direção oposta daquela que o controlo pitch faria. Este
tipo de controlo aumenta o ângulo de ataque das pás da turbina eólica no sentido de fazer
aumentar a força de arrasto, desperdiçando assim o excesso de energia cinética do vento.
Relativamente ao ângulo das pás neste controlo, o mesmo pode variar entre 0º e -6º;
stall–passivo – neste tipo de controlo, as pás estão aparafusadas ao rotor segundo um
ângulo fixo de modo a que, no momento em que a potência nominal é ultrapassada, seja criada
uma turbulência na parte de trás das pás. A força de sustentação, que é responsável pelo
movimento das pás, devido a turbulência criada cai drasticamente e consequentemente diminui
a velocidade de rotação das mesmas.
Hoje em dia, nos parques eólicos são utilizados diferentes tipos de aerogeradores para
produção de energia elétrica. Pode-se identificar dois tipos de aerogeradores ligados às redes
elétricas: os aerogeradores de velocidade fixa e os aerogeradores de velocidade variável[10].
Os aerogeradores de velocidade fixa correspondem a:

9
Geradores de indução de rotor em gaiola de esquilo (gerador de indução
convencional).
Os aerogeradores de velocidade variável distinguem-se nos seguintes tipos:
Geradores de indução duplamente alimentados;
Conversor Integral.
Os aerogeradores com geradores de indução de rotor em gaiola de esquilo correspondiam
à tecnologia mais utilizada no início da exploração do vento como forma de produzir energia
elétrica [2]. Este indicador justificava-se pela sua robustez, simplicidade e baixo custo do
gerador de indução de rotor em gaiola de esquilo [2], [11]. Hoje em dia, os aerogeradores com
geradores de indução duplamente alimentados e os aerogeradores com geradores síncronos de
ímanes permanentes têm vindo gradualmente a substituir os aerogeradores de indução de rotor
em gaiola de esquilo, pois permitem controlar a potência ativa e reativa.
Também devido à importância cada vez maior que a produção eólica tem vindo a assumir
no setor elétrico mundial, são atualmente exigidos requisitos pelos operadores das redes aos
centros eólicos que não é possível assegurar através de aerogeradores de indução convencional.
2.2.1 Aerogeradores com Gerador de Indução de rotor em gaiola de esquilo
Os aerogeradores com geradores de indução de rotor em gaiola de esquilo são designados
como sistemas de velocidade fixa devido à sua operação a velocidade praticamente constante
resultante da ligação direta do gerador de indução à rede elétrica. Nesta configuração a
velocidade do rotor do gerador de indução é praticamente fixa e definida pela frequência da
rede, tendo em conta o número de pólos e o limite de variação do deslizamento (1% a 2% em
relação ao deslizamento nominal), independentemente da velocidade do vento incidente nas
pás. O deslizamento define-se como sendo a diferença relativa entre a velocidade de
sincronismo e a velocidade do rotor [12].
Este tipo de tecnologia utiliza uma caixa de velocidades para realizar a ligação entre o
rotor da turbina e o gerador, como se visualiza na Figura 2.2. A caixa de velocidades neste
sistema de conversão de energia tem a função de sincronizar a energia mecânica do gerador
com a energia mecânica fornecida pela turbina de modo a atingirem o ponto ótimo de
funcionamento e extrair o máximo de energia do sistema.

10 Estado da Arte
Figura 2.2 – Esquema do aerogerador com gerador de indução de rotor em gaiola de esquilo
Como principais vantagens, este tipo de tecnologia apresenta a simplicidade e a robustez,
bem como um baixo custo de investimento quando comparado com outros tipos de tecnologias
existentes. Como principais desvantagens, apresenta a incapacidade de controlo de potência
ativa e reativa, o seu funcionamento a velocidade praticamente constante e o facto de que a
qualidade de energia produzida refletir os efeitos da variabilidade do recurso [12].
Uma das caraterísticas do gerador de indução de rotor em gaiola de esquilo reside no facto
de não possuir circuito de excitação. Como não possui este circuito, o gerador absorve sempre
potência reativa da rede elétrica para que seja criado e sustentado o campo magnético
necessário ao seu funcionamento [3]. Para compensar parcialmente ou totalmente a energia
reativa consumida por este tipo de gerador, são colocadas localmente baterias de
condensadores. A potência reativa produzida pelas baterias de condensadores depende da
tensão que se encontra aos seus terminais.
O comportamento deste tipo de aerogerador face a uma cava de tensão após a ocorrência
de um curto-circuito é um dos principais problemas que apresenta. Na secção 2.3 do presente
capítulo será explicado com mais detalhes o comportamento deste aerogerador em caso de
curto-circuitos.
2.2.2 Aerogeradores com Gerador de Indução Duplamente Alimentados
Os aerogeradores com gerador de indução duplamente alimentos, definidos como Double
Fed Induction Generator (DFIG) na literatura anglo-saxónica, são designados desta forma por
serem alimentados simultaneamente pelo estator e pelo rotor.
Este tipo de tecnologia carateriza-se pela ligação direta do estator à rede elétrica e pela
ligação do rotor à rede elétrica através de um conversor de eletrónica de potência AC/DC/AC.
Outro dos aspetos característicos desta tecnologia é serem constituídos por uma turbina com
controlo de pitch, para limitar a potência mecânica.
Os conversores de eletrónica de potência utilizados neste tipo de tecnologia são necessários
para fazer o desacoplamento entre a frequência do gerador e a frequência da rede,
possibilitando o controlo da velocidade de rotação do gerador numa gama de variação alargada
e desta forma aumentar a eficiência do sistema. Este tipo de sistemas de conversão apresentam

11
capacidades de funcionamento a velocidade variável, numa gama típica de velocidades de
cerca de 25% da capacidade nominal do conjunto turbina/gerador, que permite um maior
aproveitamento perante a variabilidade da velocidade do vento que se verifica na turbina eólica
[13].
Figura 2.3 – Esquema do aerogerador com gerador de indução duplamente alimentado
O conversor de eletrónica de potência AC/DC/AC é constituído por dois conversores, como
podemos constatar na Figura 2.3. Um conversor DC/AC do lado da rede que controla a tensão
no barramento CC e que opera com a frequência do sistema elétrico, os 50Hz, impondo a
frequência de saída do DFIG. E um outro conversor AC/DC do lado do gerador que controla a
corrente do rotor, e deste modo a potência ativa e reativa injetada na rede [14]. O conversor
AC/DC que liga ao rotor do DFIG trabalha com diferentes frequências. O mesmo conversor é
responsável por injetar tensões ou correntes controladas no rotor da máquina partindo de
estratégias de controlo pré-definidas. Esta tecnologia, tal como o aerogerador de indução
convencional e pela mesma razão utiliza uma caixa de velocidades.
Os conversores usualmente utilizados são constituídos por Insulated Gate Bipolar Transistor
(IGBT) pois permitem a troca bidirecional de potência ativa entre o rotor e a rede elétrica. A
troca bidirecional proporcionada pelo IGBT permite que este aerogerador funcione em modo
de operação supersíncrono ou subsíncrono. O modo de operação supersícrono corresponde à
entrega de potência ativa da máquina à rede. Já o modo de operação subsíncrono corresponde
à entrega da potência ativa da rede à máquina [15].
Alterando as estratégias de controlo do conversor de eletrónica de potência, é possível
colocar o gerador a produzir a potência ativa correspondente à potência máxima extraída da
turbina eólica ou a realizar compensação de potência reativa para a rede elétrica, aspeto
importante em situações de curto-circuito.
Este tipo de tecnologia, além de ter a capacidade de funcionamento a velocidade variável
numa gama típica de cerca de 25% em torno da velocidade de sincronismo, também apresenta
como vantagens a capacidade de controlo da potência ativa e reativa e aumento da eficiência.
Por outro lado, apresenta como desvantagens o parcial desacoplamento entre o aerogerador e
a rede elétrica, tornando o aerogerador mais sensível aos defeitos na rede elétrica. Outra das

12 Estado da Arte
desvantagens deste tipo de tecnologia é a necessidade de um sistema de proteção para o
conversor de forma a protegê-lo de correntes de defeito elevadas que se verificam no rotor
quando ocorre um curto-circuito [12].
2.2.3 Aerogeradores com Conversor Integral
Os aerogeradores com conversor integral são designados como sistemas de velocidade
variável com conversor integral. O gerador mais utilizado neste tipo de tecnologia é o gerador
síncrono de ímanes permanentes denominado na literatura anglo-saxónica de Permanent
Magnet Synchronous Generator (PMSG). O conversor integral usado neste tipo de tecnologia é
constituído por dois conversores, um conversor ligado ao estator do gerador e o outro ligado à
rede elétrica, como se pode verificar na Figura 2.4 [16].
O conversor integral tem como função realizar o desacoplamento quase total entre as
frequências da rede e do gerador, permitindo deste modo, alargar a gama de variação de
velocidade. Este aerogerador tem uma variação de velocidade entre 0% e 100% da velocidade
nominal de rotação permitindo-lhe ter uma maior eficiência para os vários regimes de vento
[12]. O conversor ligado à rede elétrica tem como função a transferência de potência ativa e
reativa entre a rede elétrica e o gerador. O conversor ligado ao estator do gerador tem a função
de controlar o binário da máquina e desta forma controlar a velocidade de rotação da mesma
[12].
Figura 2.4 – Esquema do aerogerador com gerador síncrono
O gerador síncrono carateriza-se pelo elevado número de pares de polos e a sua baixa
velocidade de rotação permitindo a não utilização de caixa de velocidades. Outro dos aspetos
caraterizantes desta tecnologia é o uso de turbinas com controlo de pitch ou stall-ativo para
ajuste dos ângulos das pás de forma a captar a máxima energia do vento.
A grande vantagem do uso dos conversores de eletrónica de potência neste tipo de sistema
eólico é o desacoplamento quase total entre a rede elétrica e o gerador, assim quando ocorre
um defeito na rede elétrica perturbará muito pouco ou nada o gerador[16]. Outras das
vantagens prende-se com o facto da eliminação da caixa de velocidades permitindo o
melhoramento da eficiência, a redução de custos associada à manutenção da mesma e a
redução do peso do aerogerador [12].

13
Como desvantagens este tipo de tecnologia apresenta o facto de os conversores presentes
na saída do gerador terem de ser dimensionados de acordo com a potência nominal do conjunto
turbina/gerador, encarecendo bastante este tipo de tecnologia. O elevado número de pares de
polos do gerador provoca com que o diâmetro do gerador elétrico seja maior e desta forma que
as cabinas onde se inserem os mesmos sejam maiores, sendo esta outra desvantagem associada
a esta tecnologia.
Com os recentes avanços tecnológicos, as desvantagens que tenderiam a limitar o uso de
aerogeradores com geradores de ímanes permanentes, devido aos custos elevados tem vindo a
ser eliminadas [12].
2.2.4 Outras Tecnologias de Aerogeradores
Nas seções anteriores abordaram-se os tipos de tecnologia que são utilizados mais
usualmente, mas existem outras tecnologias de aerogeradores que também são exploradas mas
em menor escala. Neste grupo destacam-se o gerador de relutância, o gerador de alta voltagem
e o gerador de fluxo transversal [17]. Estas tecnologias podem ser ligadas à rede elétrica a
partir de diferentes configurações de conversores eletrónicos.
2.3 Comportamento do Aerogerador com Gerador de Indução de
rotor em gaiola de esquilo em caso de Curto-Circuitos
Nesta dissertação é essencial entender o comportamento dinâmico do aerogerador com
gerador de indução de rotor em gaiola de esquilo perante curto-circuitos. Posto isto, será
realizada uma análise detalhada do seu comportamento nestas situações.
O gerador de indução de rotor em gaiola de esquilo usado neste tipo de aerogeradores
necessita de consumir uma quantidade significativa de potência reativa para alimentar o seu
campo magnético imprescindível ao seu funcionamento [11], [18].
Quando uma cava de tensão provocada por um curto-circuito é sentida aos terminais desta
máquina, o campo magnético desmagnetiza e o rotor tende aumentar a velocidade. Toda a
potência reativa do campo magnético é injetada pelo gerador para tentar segurar a tensão. Ao
mesmo tempo, a potência ativa entregue à rede reduz significativamente, bem como o binário
eletromagnético, enquanto o binário mecânico permanece praticamente constante. Devido ao
desequilíbrio de binários, o rotor tenderá a acelerar [3], [19].
Quando o defeito é eliminado o gerador de indução de rotor em gaiola de esquilo requer
um elevado consumo de potência reativa para voltar a criar o seu circuito magnético de forma
a tentar recuperar a corrente injetada, e por consequência equilibrar o binário eletromagnético
com o binário mecânico, recuperando para a sua condição normal de operação [19], [18]. Se o
elevado consumo de potência reativa necessário para voltar a magnetizar o campo magnético
não estiver disponível, o gerador irá acelerar continuamente e terá de ser desligado.

14 Estado da Arte
Embora se utilizem baterias de condensadores para compensar parte, ou toda, da potência
reativa solicitada pelo gerador de indução, as mesmas pouco contribuem para atenuar o
elevado consumo dessa potência, devido à redução da tensão aos seus terminais [20]. Nesta
situação, a potência reativa requerida é procedente da rede elétrica.
Os aerogeradores com esta tecnologia normalmente são desligados da rede através da
atuação do relé de mínimo de tensão, que se encontra regulado normalmente para disparar
quando a tensão atinge valores inferiores a 0,85 p.u. (valor definido pelo fabricante) ou do relé
de máximo de velocidade, que atua quando os binários eletromagnético e mecânico não se
equilibram. Estes aerogeradores facilmente são desligados pois tem o relé de mínimo de tensão
regulado para um valor elevado que desta forma evita acréscimos de fadigas térmicas e
mecânicas não desejáveis que seriam causadas se o gerador permanece em operação durante
o defeito [21].
Este tipo de tecnologia como não possui conversores de eletrónica de potência não
consegue ajudar na regulação da tensão da rede elétrica durante e após o curto-circuito.
O valor da potência de curto-circuito no ponto de interligação dos aerogeradores tem um
contributo relevante na capacidade do sistema elétrico em alimentar a energia requerida pelos
parques eólicos convencionais, de modo a garantir os níveis mínimos de tensão [20].
Em relação ao comportamento deste tipo de aerogerador perante curto-circuitos pode-se
concluir que não tem capacidade de participar na regulação de tensão, antes pelo contrário,
durante a perturbação, este tipo de máquina tem um consumo elevado de energia reativa o
que pode levar ao colapso da tensão. Além disso, este tipo de aerogeradores normalmente
saem de serviço provocando a perda de potência ativa para o sistema. Se um parque eólico for
constituído por este tipo de tecnologia e estiver a injetar na rede uma quantidade elevada de
potência ativa poderá originar graves problemas de estabilidade.
2.4 Requisitos técnicos de ligação à rede elétrica
Nos últimos anos, principalmente na última década, em Portugal verificava-se que os
Operadores de Rede (OR) não imponham requisitos aos parques eólicos quando acontecia um
curto-circuito na rede, tal como sucedia em muitos outros países com elevada produção eólica.
Nesta época quase todos os parques eólicos instalados eram constituídos por geradores de
indução convencionais que, como se viu na secção 2.3, não tinham capacidade de suportar
cavas de tensão e saíam de serviço sempre que ocorria um curto-circuito na rede, provocando
perdas de potência no sistema e respetiva queda de frequência. Nessa época, os parques eólicos
instalados e que ainda hoje se encontram em serviço raramente ultrapassavam os 10 MW de
potência total e toda a energia que produziam era injetada na rede elétrica, não estando
sujeitos ao despacho.

15
O aumento dos níveis de penetração de energia eólica verificada originou a elaboração de
requisitos técnicos específicos para a ligação dos parques eólicos à rede por parte dos OR. Pois
cada vez que existia um curto-circuito e uma quantidade elevada de potência eólica estivesse
a ser injetada na rede, provocava uma perda de potência considerável, de tal forma que
começou ameaçar a perda de estabilidade do sistema. Outros fatores como a imprevisibilidade
de produção, a dificuldade de despacho devido à não regulação de produção e o
congestionamento nos nós, também contribuíam para ameaçar a perda de estabilidade [20].
Estes fatores e os seus efeitos causados nos Sistemas Elétricos de Energia (SEE) provocaram
a imposição dos requisitos técnicos à produção eólica de modo a poderem ligar-se à rede
elétrica. Estes requisitos técnicos exigidos aos novos parques eólicos que se queiram ligar à
rede elétrica originou a criação dos grid codes, designados deste modo na literatura anglo-
saxónica.
Nos grid codes estão definidos os requisitos exigidos aos novos parques eólicos, sendo
alguns desses requisitos: controlo primário de frequência, capacidade de despacho em caso de
ser necessário limitar temporariamente os níveis de produção eólica em situação de
emergência, controlo da tensão e energia reativa e a capacidade de sobrevivência a cavas de
tensão na sequência de defeitos.
Os novos códigos de rede impõe que os parques eólicos devem contribuir para o controlo
do sistema de energia (frequência e tensão) tal como as centrais de produção convencionais,
de modo a que o sistema de energia se mantenha estável e fiável.
Estes requisitos exigidos aos novos parques eólicos provocaram que os parques eólicos
passassem a ser instalados com geradores de indução duplamente alimentados ou geradores
síncronos de ímanes permanentes em vez dos geradores de indução convencional. Como se
estudou na secção 2.2, estes geradores comparativamente com os geradores de indução
convencional são capazes de fornecem potência reativa durante e após do defeito contribuindo
para o suporte de tensão sendo capazes de cumprirem com os requisitos exigidos aos mesmos.
De seguida, são apresentados os principais requisitos exigidos, durante os defeitos, aos
novos parques eólicos instalados em Portugal.
2.4.1 Desvio de frequência
Em Portugal, é de notar que existem dois regulamentos: o regulamento da rede de
transporte e o regulamento da rede de distribuição. Relativamente ao desvio de frequência, o
regulamento da rede de transporte define que as instalações de produção eólica devem
suportar desvios de frequência entre 47,5 Hz e 51,5 Hz sem se desligarem da rede[22]. Já o
regulamento da rede de distribuição define o mesmo mas apenas se aplica aos parques eólicos
com potência instalada superior a 6 MVA [23].

16 Estado da Arte
Relativamente ao sistema de proteção e controlo dos geradores eólicos, os regulamentos
definem que a função de mínimo de frequência é regulamentada para o valor 47,5 HZ e a
função de máximo de frequência é regulada para 51,5 HZ [22], [23].
2.4.2 Capacidade de sobrevivência a cavas de tensão provocadas por
defeitos
A capacidade de suportar cavas de tensão pode ser definido como sendo a capacidade de
um sistema de produção eólica se manter em operação perante o aparecimento de cavas de
tensão resultantes de defeitos na rede e ainda contribuir para a melhoria das tensões da rede
através da injeção de corrente reativa [24].
O regulamento da rede de transporte exige que “as instalações de produção eólica que se
liguem a esta rede devem permanecer ligadas para cavas de tensão decorrentes de defeito
trifásicos, bifásicos ou monofásicos sempre que a tensão, no enrolamento do lado da rede do
transformador de interligação da instalação de produção eólica, esteja acima da curva
apresentada na Figura 2.5, não podendo durante o defeito e na fase de recuperação consumir
potência ativa ou reativa” [22]. O regulamento da rede de distribuição exige o mesmo e nas
mesmas condições mas apenas para parques eólicos com potência instalada superior a 6 MVA
[23].
Figura 2.5 – Curva tensão-tempo da capacidade exigidas às instalações de produção eólica para suportarem cavas de tensão [22], [23]
De notar que a curva tensão-tempo da capacidade exigida é igual nos dois regulamentos.
Os dois regulamentos também exigem que após a eliminação do defeito e início da
recuperação da tensão, a potência ativa produzida deve recuperar de acordo com uma taxa de
crescimento por segundo não inferior a 5% da sua potência nominal.
Este requisito tem como objetivo evitar que os geradores eólicos saiam de serviço sempre
que apareça um curto-circuito na rede elétrica, reduzindo assim as perturbações na mesma.
Outro dos objetivos pretendidos é evitar um apagão, quando o defeito for eliminado devido ao
desequilíbrio entre a produção e o consumo.

17
Para os parques eólicos existentes antes da implementação dos regulamentos existem
diferentes soluções que os permitem capacitar com este requisito. As soluções podem ser do
tipo intrínsecas, externas ou mistas. As soluções intrínsecas consiste em recorrer ao
melhoramento dos sistemas de controlo, se a máquina o possuir. As soluções externas consistem
na instalação de equipamentos externos aos aerogeradores que sejam capazes de fornecer essa
capacidade (FACTS). A solução mista consiste no uso de soluções intrínsecas e externas.
2.4.3 Fornecimento de corrente reativa durante cavas de tensão
Durante situações de cavas de tensões provocadas por defeitos existe outro requisito
técnico exigido que acompanha a capacidade de suportar cavas de tensão. Esse requisito é o
fornecimento de corrente reativa por parte do parque eólico.
Relativamente ao fornecimento de corrente reativa durante cavas de tensão, o
regulamento da rede de transporte exige que as instalações de produção eólica devem fornecer
corrente reativa durante cavas de tensão, de acordo com a Figura 2.6, de modo a contribuírem
para o suporte da tensão da rede [22]. Já o regulamento da rede de distribuição impõe o mesmo
que o regulamento de transporte mas apenas para parques eólicos com potência instalada
superior a 6 MVA [23]. Os respetivos regulamentos também definem que os parques eólicos
devem iniciar o cumprimento desta curva de produção mínima de corrente reativa durante
cavas de tensão com um atraso máximo de 50 ms após a deteção da cava de tensão [22], [23].
Figura 2.6 – Curva de fornecimento de potência reativa pelas instalações de produção eólica durante cavas de tensão [22], [23]
A curva apresentada em cima, define a percentagem de corrente reativa em função da
corrente nominal que deverá alimentar a rede de acordo com o valor da tensão aos terminais
do parque eólico. Na mesma curva encontram-se definidas duas zonas. A zona 1 corresponde a
situações de defeitos e recuperação, para valores de tensão aos terminais do parque inferiores
a 90% da tensão nominal. O parque eólico deverá fornecer à rede em cada instante, uma
quantidade de energia reativa que se situe dentro desta zona de acordo com os valores de

18 Estado da Arte
tensão aos terminais do parque. A zona 2 corresponde ao regime de funcionamento estacionário
estando a tensão aos terminais do parque acima dos 90% da tensão nominal, devendo o parque
fornecer corrente reativa de acordo com o regime em que se encontra (horas de cheias e de
pontas ou horas de vazio e de super-vazio).
A injeção de energia reativa exigida aos parques eólicos visa atenuar as quedas de tensão
provocadas por curto-circuitos. Deste modo, os aerogeradores ao fornecem este serviço à rede
estão a ajudar a restabelecer a tensão para os valores nominais e consequentemente a evitar
que se perca a estabilidade da rede elétrica.
2.5 FACTS
Na secção 2.3 abordou-se o comportamento dos aerogeradores com gerador de indução de
rotor em gaiola de esquilo perante cava de tensão provocadas por curto-circuito e constatou-
se que não possuem capacidade de sobrevivência a cavas de tensão bem como não têm
capacidade de ajudar a rede elétrica a suportar a tensão. Na secção 2.4.2 analisou-se a
capacidade de suportar cavas de tensão na sequência de defeitos imposta aos novos parques
eólicos.
Para os parques eólicos existentes antes da implementação dos regulamentos, averiguou-
se que estes saiam de serviço sempre que a tensão atinge valores inferiores a 0,85 p.u., não
possuindo capacidade de sobrevivência a cavas de tensão. Nestas condições averiguou-se que
existem, pelo menos, duas soluções para equipar os parques eólicos para cumprir este
requisito: soluções intrínsecas e/ou soluções externas.
Relativamente aos parques eólicos equipados com geradores de indução convencionais
apurou-se que os mesmos não possuem capacidade de sobrevivência, nem conseguem fornecer
a mesma porque têm de sair de serviço quando a tensão passa abaixo de 0,85 p.u. de modo a
proteger a máquina de fadigas térmicas e mecânicas não desejáveis. Uma das poucas hipóteses
de os auxiliar de modo a não saírem de serviço é através da utilização de soluções externas que
consigam suportar a tensão acima do limite definido. Um exemplo dessas soluções que
permitem este auxílio são os equipamentos FACTS.
Os FACTS consistem em dispositivos de eletrónica de potência que foram desenvolvidos
para tornar mais flexível a operação dos sistemas de transmissão, isto é, para aumentar o
controlo e a capacidade de transferência de energia. Estes podem ser classificados de acordo
com a forma de ligação em 3 grupos: dispositivos série, dispositivos shunt ou paralela e
dispositivos híbridos.
De acordo com os 3 grupos definidos, os dispositivos FACTS podem agrupar-se do seguinte
modo:
Dispositivos série: Thyristor Controlled Series Capacitor (TCSC), Thyristor Controlled
Phase Angle Regulator (TCPAR) e Static Synchronous Series Source (SSSS);

19
Dispositivos shunt ou paralelo: SVC e STATCOM;
Dispositivos híbridos: Unified Power Flow Controller (UPFC).
De modo a enquadrar o surgimento de cada dispositivo FACTS, apresenta-se uma breve
introdução histórica. O primeiro dispositivo de eletrónica de potência a ser incorporado num
sistema elétrico era composto por reactâncias controladas por tirístores, também designado
como Thyristor Controlled Reactor ou TCR. Em conjunto com um Thyristor Switched Capacitor
(TSC), este dispositivo permite constituir um SVC [25].
O TCSC e o TCPAR desenvolveram-se a partir da introdução do controlo por tirístores nas
capacidades série e nos reguladores desfasadores que tradicionalmente, realizam o controlo
do trânsito de potências em redes de transmissão.
Com os avanços alcançados no desenvolvimento de componentes de eletrónica de potência,
como os que resultaram no desenvolvimento de Gate Turn-Off Thyristors (GTO) e (IGBT),
permitiram a construção de conversores com comutação forçada para aplicações de eletrónica
de grande potência. Ao desenvolvimento referido, acompanhou-o o desenvolvimento dos
dispositivos FACTS, surgindo dispositivos para efetuar compensação série, compensação
paralela ou mesmo híbrida. Para efetuar compensação série, um dos dispositivos que surgiu,
designa-se Static Synchronous Series Source (SSSS). Como dispositivo de compensação paralela
surgiu o STATCOM. Da combinação de um STATCOM e um SSSS, interligados através de uma
ligação composta por uma capacidade DC, surgiu um dispositivo híbrido designado Unified
Power Flow Controller (UPFC) [25].
Dos dispositivos FACTS apresentados anteriormente, os dispositivos paralelo são os mais
adequados para realizar controlo de tensão, isto porque, não obrigam a alterações na rede de
forma a poder incorporá-los e ainda introduzem menos perdas. Tal como os dispositivos série
e híbridos, este tipo de dispositivos fornecem suporte de tensão no ponto de interligação com
a rede, tanto em regime permanente como em regime dinâmico. Em regime permanente,
permitem o controlo de variáveis como a magnitude da tensão ou o trânsito de potências. Em
regime dinâmico, os dispositivos procuram manter os valores de tensão dentro de valores
aceitáveis de modo a que não provoquem a atuação das proteções de mínimo de tensão,
durante os curto-circuitos e na fase de recuperação dos mesmos [25].
Além das funções apresentadas, ainda podem ser utilizados em sistema elétricos
industriais, nomeadamente com os seguintes objetivos: mitigar o efeito nefasto provocado
pelas cargas desequilibradas de sistemas elétricos ferroviários e o efeito flicker provocado por
fornos de arco [25].
Os dispositivos paralelo, SVC e STATCOM, serão detalhados nas secções seguintes visto que,
são os que apresentam melhores caraterísticas para realizar o suporte de tensão durante e após

20 Estado da Arte
a ocorrência de defeitos de modo a evitar uma descida tão abrupta da tensão e
consequentemente evitar, em várias ocasiões, a saída de serviço dos aerogeradores com
geradores de indução convencional.
2.5.1 Dispositivo SVC
Tal como já foi referido na secção anterior, os SVC (Static Var Compensators) são
constituídos por TCR e TSC. Os TCR fornecem uma variação contínua da reactância total shunt
do SVC, enquanto os TSC permitem ligar e desligar a capacidade shunt sem a introdução de
fenómenos transitórios. Os sistemas de controlo dos TCR e TSC são devidamente coordenados
de modo a realizar uma variação contínua da susceptância total dos SVC. Além disso, o sistema
TSC deverá incorporar uma banda morta de modo a evitar ligações ou desligações indesejadas.
Na Figura 2.7 representa-se uma configuração possível de um SVC, que contém um TCR em
paralelo com dois TSC.
Figura 2.7 – Configuração possível de um SVC[8]
Um dos atributos principais de um SVC e que se apresenta como uma desvantagem para o
mesmo, é o facto da sua capacidade de injeção de energia reativa depender do quadrado da
tensão que se encontra aos terminais de ligação com a rede. Isto é, quando a tensão na rede
se encontra em valores próximos de 1 p.u., o SVC consegue contribuir na sua máxima
capacidade para o controlo de tensão e injetar o máximo de potência reativa que lhe é possível.
Por outro lado, quando se verificam cavas de tensão na rede, o SVC vê a sua capacidade afetada
[26]. Quanto maior for a cava de tensão provocada pelo curto-circuito, menor será a capacidade
de resposta do SVC, como se poderá ver na secção 2.5.1.2.
2.5.1.1 Tecnologia
Nesta secção descreve-se as principais caraterísticas de operação de um TCR e de um TSC
de modo a perceber o modo de operação do SVC.
Thyristor Controlled Reator (TCR)
O TCR é constituído por uma bobine ligada em série com um interruptor formado por dois
tirístores colocados em antiparalelo, permitindo uma comutação bidirecional como se constata

21
na Figura 2.7. Na Figura 2.8 apresenta-se o esquema trifásico de um TCR de seis pulsos que é
composto por três fases ligadas em triângulo sendo cada uma fase composta por duas
reactâncias e dois tirístores ligados em antiparalelo.
Figura 2.8 – Esquema trifásico de um TCR
Figura 2.9 – Tensão e corrente numa fase de um TCR, em função do ângulo de disparo dos tirístores
A Figura 2.9 apresenta a evolução temporal do valor instantâneo da tensão (v) e corrente
(i) numa fase do TCR da Figura 2.8, em função dos valores definidos para o ângulo de disparo
α e o ângulo de condução σ. Os dois tirístores que se encontram em antiparalelo conduzem, de
forma alternada, durante um intervalo de tempo que depende do valor atribuído ao ângulo de
disparo α, sendo este, quem controla a potência reativa que é consumida pela reactância. Tal
22 Estado da Arte
como se observa na Figura 2.9, a medição deste ângulo tem origem na passagem da tensão por
zero, sendo a relação entre os ângulos α e σ, dado por:
𝜎 = 2 ∙ (𝜋 − 𝛼) (2.1)
A gama de controlo do TCR é definida pela gama de valores que é possível atribuir ao ângulo
α, a qual corresponde valores compreendidos entre 90º e 180º. Deste modo, o TCR pode
controlar o ajuste dos valores de potência reativa injetada ou absorvida quando desejar.
Thyristor Switched Capacitor (TSC)
O TSC é constituído por um condensador que se encontra ligado à rede através de tirístores.
Neste dispositivo o ângulo de disparo dos tirístores é escolhido de modo a minimizar os
fenómenos transitórios resultantes das ações de ligação e desligação. Estes fenómenos
transitórios conseguem ser evitados, se a tensão aos terminais dos tirístores for nula no
momento do disparo.
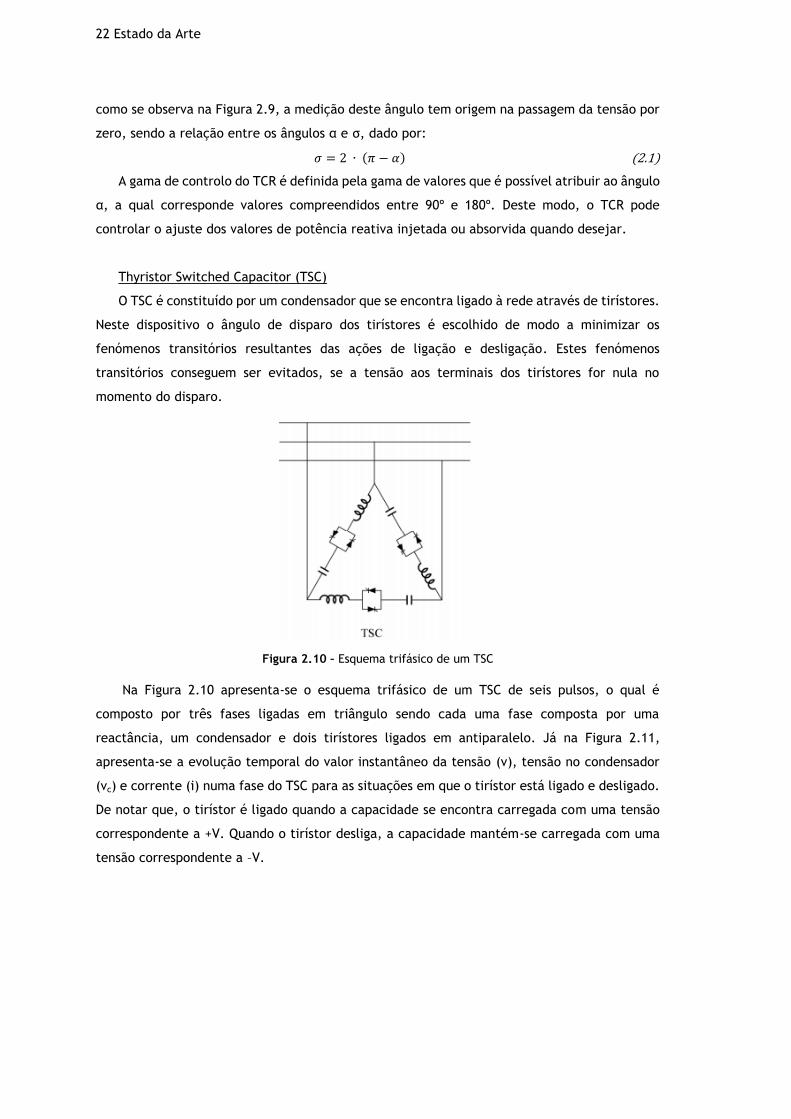
Figura 2.10 – Esquema trifásico de um TSC
Na Figura 2.10 apresenta-se o esquema trifásico de um TSC de seis pulsos, o qual é
composto por três fases ligadas em triângulo sendo cada uma fase composta por uma
reactância, um condensador e dois tirístores ligados em antiparalelo. Já na Figura 2.11,
apresenta-se a evolução temporal do valor instantâneo da tensão (v), tensão no condensador
(vc) e corrente (i) numa fase do TSC para as situações em que o tirístor está ligado e desligado.
De notar que, o tirístor é ligado quando a capacidade se encontra carregada com uma tensão
correspondente a +V. Quando o tirístor desliga, a capacidade mantém-se carregada com uma
tensão correspondente a –V.

23
Figura 2.11 – Tensão instantânea, tensão no condensador e corrente numa fase de um TSC
2.5.1.2 Caraterística de funcionamento
A Figura 2.12 apresenta a caraterística de funcionamento de um SVC, ou seja a relação
entre a tensão e a corrente do SVC.
Figura 2.12 – Caraterística tensão-corrente do SVC[8]
Na Figura 2.12, IC(MAX) representa o valor máximo de corrente capacitiva que o SVC consegue
injetar. Já IL(MAX) representa o valor máximo de corrente indutiva que o SVC consegue injetar.
Corrente capacitiva corresponde a injeção de potência reativa e corrente indutiva corresponde
a absorção de potência reativa.
Analisando a Figura 2.12, constata-se que dentro da gama de valores contidos entre o valor
máximo e mínimo de corrente do SVC (IC (MAX) e IL (MAX)), a relação entre a tensão (V) e a corrente
(I) do dispositivo é ditada por uma reta (reta 1 na Figura 2.12) cuja inclinação corresponde ao
inverso do ganho (K) do respetivo regulador de tensão. Esta reta atravessa o eixo das abcissas
(eixo Vs), no ponto em que V = VREF. Em regime permanente é nesta reta que se encontra o
ponto de funcionamento do SVC.
Quando a tensão V ultrapassa um certo valor acima do valor de VREF, ou seja, o valor de
limite máximo, o SVC satura e comporta-se como uma reactância indutiva, absorvendo o

24 Estado da Arte
máximo possível de potência reativa. Por outro lado, quando a tensão V ultrapassa um certo
valor abaixo do valor de VREF, ou seja o valor de limite mínimo, o SVC vê a sua capacidade de
injeção de potência reativa diminuída porque a mesma depende do quadrado da tensão que se
verifica aos seus terminais. Quanto maior for a queda de tensão, menor será a capacidade de
injeção de potência reativa do SVC, como se pode constatar pela reta 2 que define o
comportamento do SVC.
2.5.2 Dispositivo STATCOM
O STATCOM (Static Synchronous Compensator), tal como o SVC, é um dispositivo eletrónico
utilizado para regular a tensão no ponto de ligação através da produção ou consumo de energia
reativa. Este dispositivo baseia-se em conversores controlados como fonte de tensão de
comutação forçada, sendo capazes de fornecer correntes capacitivas ou indutivas.
Figura 2.13 – Configuração típica de um STATCOM[8]
2.5.2.1 Tecnologia
O STATCOM é constituído pelo transformador de acoplamento, o inversor (VSC) e a fonte
de corrente contínua, como se constata na Figura 2.13. O transformador de acoplamento é o
responsável pela ligação do STATCOM à rede elétrica. Como fonte de corrente contínua utiliza
um condensador DC, possuindo uma capacidade limitada de troca de potência ativa com a rede.
As únicas trocas de potência ativa efetuadas são as necessárias para modificar o nível da tensão
DC e para cobrir as próprias perdas. O inversor (VSC) converte a tensão DC de entrada em um
conjunto de 3 fases de tensão de saída AC com amplitude e fase desejadas
Figura 2.14 – Topologia de um conversor fonte de tensão com comutação forçada (STATCOM)[27]

25
A Figura 2.14 apresenta a topologia de um conversor fonte de tensão com comutação
forçada. Esta estrutura de controlo a dois níveis é utilizada frequentemente em topologias de
multinível em aplicações de elevados níveis de tensão e potência associado.
Independentemente da topologia utilizada, estes dispositivos permitem um controlo
independente da amplitude e fase da tensão que é sintetizada mediante a utilização de
técnicas baseadas em Pulse Width Modulation (PWM). Desta forma, este tipo de dispositivos
apresenta elevados níveis de controlabilidade e introduz um baixo conteúdo harmónico. O
sistema de controlo de um STATCOM determina o fator de modelação e a fase do algoritmo
PWM, sendo estes parâmetro obtidos a partir das componentes direta e em quadratura da
tensão fornecida pelo STATCOM. Apesar de estas componentes corresponderem às grandezas
de saída do STATCOM, estas são reguladas mediante o controlo da corrente nos conversores,
de modo a se conseguir impor limites.
2.5.2.2 Caraterística de funcionamento
A caraterística de funcionamento de um STATCOM é apresentada na Figura 2.15.
Figura 2.15 - Caraterística tensão-corrente do STATCOM[28]
Na Figura 2.15, IC(MAX) representa o valor máximo de corrente capacitiva que o STATCOM
consegue injetar. Já IL(MAX) representa o valor máximo de corrente indutiva que o STATCOM
consegue injetar.
Analisando a figura, constata-se que dentro da gama de valores contidos entre o valor
máximo e mínimo de corrente do STATCOM (IC (MAX) e IL (MAX)), a relação entre a tensão (V) e a
corrente (I) do dispositivo é ditada por uma reta cuja inclinação corresponde ao inverso do
ganho proporcional, K, do respetivo regulador de tensão. Esta reta atravessa o eixo das abcissas
(eixo Vs), no ponto em que V = VREF. Em regime de funcionamento normal da rede, é nesta reta
que se encontra o ponto de funcionamento do STATCOM.
Quando a tensão V ultrapassa o valor de limite máximo ou o valor de limite mínimo definido,
o STATCOM comporta-se como um dispositivo que fornece corrente constante. Se ultrapassa o
limite máximo, fornece o máximo de corrente indutiva, ou seja consome o máximo de potência
reativa para o qual está dimensionado o STATCOM. Se ultrapassa o limite mínimo, fornece o

26 Estado da Arte
máximo de corrente capacitiva, injetando o máximo de potência reativa. Contrariamente ao
que sucede com o SVC, o STATCOM mantém a sua capacidade de injeção de corrente reativa
igual quer seja para tensões elevadas ou para tensões reduzidas.
2.5.3 Comparação entre SVC e STATCOM
Na secção 2.5.1 e na secção 2.5.2 apresentou-se individualmente os tipos de FACTS que
apresentam melhores caraterísticas para garantir a segurança de operação em sistemas
elétricos que exploram elevados valores de geração eólica, na ocorrência de defeitos. Nesta
secção pretende-se fazer uma comparação entre os dois tipos de FACTS e perceber quais as
vantagens e desvantagens que cada um apresenta perante o outro.
Analisando os custos associados a cada tecnologia verificamos que os mesmos podem ser
divididos em duas categorias: despesas de investimento e despesas de exploração. Os custos
que pertencem as despesas de investimento dependem obviamente das especificidades dos
casos de aplicação. De modo geral, em [29] e [30], estes custos são avaliados aproximadamente
em 40 $/kvar para os SVC e em 50 $/kvar para os STATCOM. As despesas de exploração incluem
os custos de manutenção e as perdas. A referência [31] avalia a necessidade de manutenção a
1-2 pessoas-dia, por ano, para ambos os tipos de FACTS. Enquanto as perdas em carga são um
pouco mais elevadas para os STATCOM (aprox. 1% contra 0,5% a 0,75% para os SVC) devido aos
conversores de fonte de tensão, já as perdas em vazio são similares e iguais a 0,1% da Sn para
as duas tecnologias.
Em termos de impactos sobre a qualidade da onda de tensão, os dispositivos de tipo SVC
têm tendência a criar harmónicos de baixa frequência (de 5ª e 7ª ordens) enquanto a utilização
de conversores multinível nos dispositivos STATCOM permite geralmente obter um sinal de
melhor qualidade, com harmónicos de ordem mais elevada e de amplitude relativamente
reduzidas [31].
Em termos de rapidez, a utilização de eletrónica de potência permite obter tempos de
resposta muito baixos. Segundo [8], o tempo de resposta de um STATCOM é aproximadamente
entre 5 a 10 ms enquanto o de um SVC é aproximadamente entre 20 a 25 ms.
Eficácia perante a ocorrência de cavas de tensão
Como já foi constatado, tanto o SVC como o STATCOM são capazes de fornecer injeção de
corrente reativa durante e após a ocorrência de cavas de tensão na rede, evitando a descida
tão acentuada da tensão e conseguindo em certos casos evitar que os aerogeradores saiam de
serviço.
Analisando a Figura 2.12 e Figura 2.15, que correspondem respetivamente às caraterísticas
de funcionamento do SVC e do STATCOM, constatamos que o STATCOM apresenta melhores
propriedades de funcionamento perante cavas de tensão que o SVC. Este facto deve-se à
capacidade de injeção de corrente reativa do SVC perante cavas de tensão.

27
A capacidade de injeção de potência reativa do SVC depende do quadrado da tensão que
se verifica aos seus terminais, precisamente a tensão da rede. Quando se verificam cavas de
tensão, a capacidade de injeção de corrente reativa reduz proporcionalmente com a tensão
[27].
Já a capacidade do STATCOM depende da diferença entre a tensão que se verifica na rede
e a tensão de referência do conversor, sendo que a máxima corrente reativa injetada é apenas
limitada pela capacidade do conversor e não pela variação da tensão na rede. Quando ocorre
uma cava de tensão verifica-se que o STATCOM mantém a sua capacidade máxima de injeção
de corrente reativa [2], [8].
2.6 Conclusões
Ao longo deste capítulo abordou-se as tecnologias de conversão de energia eólica mais
utilizadas em parques eólicos destacando-se os aspetos mais relevantes de cada aerogerador.
É de realçar que os parques eólicos compostos por aerogeradores com gerador de indução de
rotor em gaiola de esquilo têm vindo a ser substituídos por parques eólicos compostos por
aerogeradores com geradores de indução duplamente alimentados e com conversor integral,
pois estes tipos de tecnologia permitem controlar o funcionamento dos mesmos.
Seguiu-se uma análise pormenorizada de como reage o aerogerador composto por geradores
de indução convencional perante cavas de tensão provocadas por defeitos, tendo em conta que
este tipo de aerogerador é objeto de estudo nesta dissertação.
Foi exposto os requisitos técnicos que os novos parques eólicos tem de cumprir para se
poderem ligar à rede elétrica, realçando os principais requisitos que os mesmos tem de cumprir
durante e após a ocorrência de cava de tensão.
Para terminar este capítulo, efetuou-se uma análise aos equipamentos FACTS de onde se
destacou o SVC e o STATCOM para auxiliar os parques eólicos a suportar a tensão. De entre
estes dois equipamentos, conclui-se que o uso do STATCOM é mais vantajoso do que o uso do
SVC para fornecer suporte de tensão.


3 Capítulo 3
Modelização do Sistema
3.1 Introdução
Este capítulo tem como objetivo abordar a modelização dinâmica dos diferentes
componentes da rede de estudo, sendo dado especial destaque ao modelo representativo do
aerogerador e ao modelo representativo do dispositivo FACTS, mais propriamente o STATCOM.
Neste capítulo é ainda realizado uma abordagem ao cruzamento entre o funcionamento do
STATCOM com o funcionamento da rede elétrica e de que modo as condições da rede
influenciam o STATCOM.
Toda a modelização da rede desenvolvida para o caso de estudo foi implementada em
ambiente MATLAB/Simulink.
3.2 Modelo do Sistema Elétrico
Na análise da estabilidade transitória, os modelos matemáticos utilizados apresentam como
caraterística principal o desprezo dos transitórios eletromagnéticos dos transformadores, das
linhas e dos estatores das máquinas rotativas[32]. Esta caraterística é a explicação para a
eliminação das equações diferenciais dos componentes referidos, passando a representar-se
por equações algébricas cujas variáveis são os correspondentes fasores de tensão e corrente.
Deste modo, e segundo a referência [32], o comportamento dinâmico de um sistema
elétrico pode ser descrito por um conjunto de equações diferencias ordinárias e por um outro
conjunto de equações algébricas.
𝑥′ = 𝑓 (𝑥, 𝑢) (3.1)
𝑦 = 𝑔 (𝑥, 𝑢) (3.2)
Onde,
x’ – derivada em ordem ao tempo das variáveis de estado do sistema;
y - vetor das saídas;
u – entradas do sistema;

30 Modelização do Sistema
g – vetor das funções não lineares que relacionam as variáveis de estado e variáveis de
entrada com as variáveis de saída.
A equação (3.1) representa as equações diferenciais que caraterizam o comportamento dos
geradores, turbinas e outros dispositivos, assim como os controlos respetivos. A equação (3.2)
representa as equações algébricas que descrevem o funcionamento do sistema elétrico. Uma
sequência de alterações nas equações (3.1) e (3.2) descrevem uma perturbação do sistema.
3.3 Modelo do Gerador de Indução de rotor em gaiola de esquilo
A obtenção das caraterísticas detalhadas dos aerogeradores apresenta-se como uma tarefa
complicada, uma vez que os fabricantes destes elementos “escondem” recursos relevantes na
construção dos aerogeradores de modo a conseguirem ter o melhor produto e assim estar um
passo à frente da concorrência.
De acordo com os modelos disponíveis na literatura e não comprometendo a qualidade dos
resultados, o modelo do gerador de indução de rotor em gaiola de esquilo utilizado, para
simular o funcionamento deste tipo de máquina implementada em aerogeradores eólicos, foi o
modelo Assynchronous Machine da biblioteca SimPowerSystems do MATLAB/Simulink.
O modo de funcionamento deste modelo é definido pelo binário (Te) aplicado e permite que
funcione como motor ou gerador. Na Figura 3.1 está representado a relação entre o binário e
o deslizamento/velocidade. Quando a velocidade se encontra entre 0 e a velocidade de
sincronismo (ns), o binário é positivo e a máquina funciona como motor. Quando a velocidade
se encontra acima da velocidade de sincronismo, o binário é negativo assim como o
deslizamento e a máquina opera como gerador. Para o caso de estudo desta dissertação, utiliza-
se o modelo como gerador, ou seja, o deslizamento é negativo.
Figura 3.1 - Caraterística típica torque-velocidade da máquina de indução convencional
Outra caraterística relevante da máquina de indução convencional utilizada é a
caraterística que relaciona a potência reativa com o deslizamento. Analisando a Figura 3.2,

31
facilmente se percebe que esta máquina consome sempre potência reativa para qualquer que
seja o deslizamento. Quando a máquina de indução convencional opera como gerador e em
regime normal de funcionamento, o deslizamento é negativo e encontra-se muito perto do
deslizamento nulo. Neste regime de funcionamento, a máquina consome, praticamente a
quantidade mínima de potência reativa requerida. Quando ocorre um curto-circuito, o
deslizamento da máquina tende afastar-se do deslizamento nulo, provocando que a mesma
consuma uma elevada quantidade de potência reativa.
Figura 3.2 – Caraterística potência reativa-deslizamento da máquina de indução convencional
O modelo utilizado para o estudo baseia-se nos parâmetros do modelo em regime
estacionário em T, que se apresenta na Figura 3.3.
Figura 3.3 – Circuito equivalente da máquina de indução de rotor em gaiola de esquilo
Na Figura 3.3, os parâmetros do circuito equivalente correspondem a:
Rs e Xs – resistência e reatância no estator [Ω];
Rr e Xr – resistência e reatância no rotor [Ω];
Xm – reatância de magnetização [Ω];
s – deslizamento da máquina.
Na modelização da máquina de indução convencional, as equações que descrevem a mesma
são transformadas para o referencial síncrono d-q, através da transformada de Park, de modo

32 Modelização do Sistema
a terem uma forma mais compacta e um tratamento matemático mais fácil. Relativamente ao
referencial d-q, o eixo q encontra-se 90º adiantado ao eixo d na direção de rotação.
O modelo dinâmico do gerador de indução de rotor em gaiola de esquilo admite um
conjunto de pressupostos e simplificações que permite reduzir o conjunto de dados do modelo
e a sua complexidade sem comprometer a qualidade dos resultados em termos de
comportamento dinâmico e de estabilidade transitória do SEE[10].
As equações elétricas relativas ao gerador de indução são reduzidas de modo a que
representem o gerador através de uma força eletromotriz atrás de uma reatância
transitória[32].
O conjunto de equações que representam o estator do gerador de indução são as que se
apresentam em baixo[32]. As tensões no rotor desta máquina são nulas.
𝑣𝑑 = −𝑅𝑠𝑖𝑑 + 𝑋′𝑖𝑞 + 𝑒𝑑′ (3.3)
𝑣𝑞 = −𝑅𝑠𝑖𝑞 − 𝑋′𝑖𝑑 + 𝑒𝑞′ (3.4)
Onde,
vd e vq – tensão no estator segundo eixo direto e em quadratura [V];
id e iq – corrente no estator segundo eixo direto e em quadratura [A];
𝑋′ - reactância transitória [Ω];
𝑒𝑑′ e 𝑒𝑞
′ - força eletromotriz transitória do estator segundo eixo direto e em quadratura [V].
As equações eletromagnéticas da máquina são definidas pelas equações (3.4) e (3.5):
𝑑𝑒𝑑
′
𝑑𝑡= −
1
𝑇0′ ∙ [𝑒𝑑
′ − (𝑋′ − 𝑋)𝑖𝑞] + 𝑠 ∙ 𝜔𝑠𝑖𝑛 ∙ 𝑒𝑞′ (3.5)
𝑑𝑒𝑞
′
𝑑𝑡= −
1
𝑇0′ ∙ [𝑒𝑞
′ − (𝑋 − 𝑋′)𝑖𝑑] − 𝑠 ∙ 𝜔𝑠𝑖𝑛 ∙ 𝑒𝑑′ (3.6)
Onde,
𝜔𝑠𝑖𝑛 – velocidade de sincronismo [rad/s];
X – reactância de circuito aberto [Ω];
𝑇0′ - constante de tempo transitória de circuito aberto [s];
s - deslizamento.
As variáveis X, X’, 𝑇0′ e s são obtidas pelas seguintes expressões:
𝑋′ = 𝑋𝑠 +(𝑋𝑚∙𝑋𝑟)
(𝑋𝑚+𝑋𝑟) (3.7)
𝑋′ = 𝑋𝑠 + 𝑋𝑚 (3.8)
𝑇0′ =
𝑋𝑚+𝑋𝑟
𝑅𝑟 (3.9)
𝑠 = 𝜔𝑠𝑖𝑛−𝜔𝑟
𝜔𝑠𝑖𝑛 (3.10)
Onde,
𝜔𝑟 – velocidade angular do rotor [rad/s].
A reactância X’ corresponde ao Xeq do modelo em T com o rotor travado enquanto a
reactância X corresponde ao Xeq do modelo em T com o rotor em circuito aberto.