Embed Size (px)
Citation preview

ANÁLISE COMPUTACIONAL DE SISTEMAS DINÂMICOS
OFFSHORE UTILIZANDO METODOLOGIA FRACAMENTE
ACOPLADA
Débora Ladeira
Projeto de Graduação apresentado ao Curso
de Engenharia Civil, Escola Politécnica, da
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro Civil.
Orientador: Bruno Martins Jacovazzo
Rio de Janeiro
Setembro de 2018

ii
ANÁLISE COMPUTACIONAL DE SISTEMAS DINÂMICOS
OFFSHORE UTILIZANDO METODOLOGIA FRACAMENTE
ACOPLADA
Débora Ladeira
PROJETO DE GRADUACAO SUBMETIDA AO CORPO DOCENTE DO
CURSO DE ENGENHARIA CIVIL DA ESCOLA POLITECNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSARIOS PARA A OBTENCAO DO GRAU DE ENGENHEIRO
CIVIL.
Aprovado por:
__________________________________________________
Prof. Bruno Martins Jacovazzo, D.Sc.
Escola Politécnica / UFRJ (Orientador)
__________________________________________________
Prof. Gilberto Bruno Ellwanger, D.Sc.
Escola Politécnica / UFRJ
__________________________________________________
Prof. Mauro Henrique Alves de Lima Júnior, D.Sc.
Escola Politécnica / UFRJ
__________________________________________________
Eng. Leonardo Sant’Anna do Nascimento, D.Sc.
Rio de Janeiro, setembro de 2018

iii
Ladeira, Débora
Análise Computacional de Sistemas Dinâmicos
Offshore Utilizando Metodologia Fracamente Acoplada
Débora Ladeira. - Rio de Janeiro: UFRJ/ Escola
Politécnica, 2018.
xiii, 81 p.: il.; 29,7 cm.
Orientador: Bruno Martins Jacovazzo
Projeto de Graduação - UFRJ/ Escola Politécnica/
Curso de Engenharia Civil, 2018.
Referências Bibliográficas: p. 79.
1. Introdução 2. Sistemas Offshore 3. Dinâmica
Computacional: Metodologias de Análise 4. Estudo de
Caso 5. Conclusões e Considerações Finais 6. Referências
Bibliográficas; I. Jacovazzo, Bruno Martins; II.
Universidade Federal do Rio de Janeiro, Escola
Politécnica, Curso de Engenharia Civil. ênfase em
Estruturas; III. Título.

iv
Ao meu orientador Bruno Jacovazzo, e ao meu chefe Leonardo Sant’Anna.

v
AGRADECIMENTOS
Agradeço primeiramente a Deus e todos os seres que me guiam e protegem.
Aos meus pais, Marcos Lúcio e Ana Lúcia, agradeço imensamente pelo apoio
incondicional e confiança depositada em mim em todos os momentos da minha vida. Aos
meus irmãos Luciellen, Polyanna, Frederico e Paula, agradeço pela amizade,
companheirismo e compreensão nos momentos de ausência. Aos meus sobrinhos Helena
e Davi agradeço pelo amor que trazem à nossa família.
Pelo LAMCSO – Laboratório de Métodos Computacionais e Sistemas Offshore
guardo profundo carinho e respeito. Foi um prazer e orgulho enormes passar seis anos da
graduação tendo o LAMCSO como minha segunda casa no Rio de Janeiro. Agradeço por
todo conhecimento adquirido e desenvolvido no Situa/Prosim. Em especial, à Ivete que
cuida de tudo e de todos com tanto carinho.
Ao meu orientador e professor Bruno Jacovazzo, a quem dedico este trabalho,
agradeço por ter sido um excelente orientador ao longo de toda minha graduação.
Agradeço imensamente por todos os ensinamentos técnicos e pessoais, e principalmente
por ter atuado tão diretamente no meu apreço pelo estudo de estruturas offshore.
Ao meu chefe Leonardo Sant’Anna, a quem também dedico este trabalho,
agradeço pela oportunidade de estágio no SURF – Subsea, Umbilical, Risers & Flowlines,
na Bureau Veritas, e por ter contribuído de forma exponencial para o meu crescimento
técnico. Agradeço também toda ajuda e compreensão, fundamentais para o
desenvolvimento deste trabalho.
Ao professor Gilberto Ellwanger agradeço por ter aceitado o convite para fazer
parte desta banca, além de relembrar a frase que um dia me disse “Escolha um trabalho
que você ama e você nunca terá que trabalhar um dia sequer na vida”, frase do filósofo
chinês Confúcio.
Ao professor Mauro Henrique, também agradeço por aceitar o convite para fazer
parte desta banca e por sempre estar disposto a me ensinar ao longo dos seis anos de
LAMCSO.
À professora Juliana Baioco agradeço pelos ensinamentos compartilhados e pelos
conselhos em momentos fundamentais.
Ao professor Carl Albrecht agradeço por sempre estar disposto a ajudar os alunos
e pela ajuda no final deste trabalho.
Ao professor Fabrício Corrêa agradeço pela oportunidade de iniciação científica
no LAMCSO e por me inspirar a seguir meus estudos em estruturas offshore.
Ao Daniel Coutinho, desenvolvedor do Situa/Prosim 2, agradeço pela ajuda
imprescindível para a conclusão deste trabalho, além de deixar meus parabéns para toda
equipe do LAMCSO pelo belo trabalho desenvolvido no Situa/Prosim 2.

vi
Ao meu amigo Juan Pablo Inza agradeço por todo conhecimento compartilhado
no início da minha carreira offshore e pelo companheirismo de sempre. Aos amigos
Gabriel Saramago e Pedro Marcelo agradeço pelas broncas necessárias, pelos bons
momentos e por dividirem comigo os anseios do engenheiro de estruturas. Ao amigo JJ
agradeço pelos bons momentos partilhados no LAMCSO e no Rio de Janeiro, e por todas
as canções. Ao meu amigo Guilherme Figueiredo agradeço por sempre estar presente em
momentos fundamentais e pela VMS.
Às minhas amigas Thais Lucas e Giuliana Gallassi agradeço por terem me
amparado em momentos difíceis, por celebrarem a vida comigo e por trazerem beleza e
doçura para a engenharia civil. À Giuliana Gallassi agradeço também por me apresentar
ao grande Catete.
Aos meus amigos do rolê dos campeões agradeço por me acolherem tão cedo e
pelo companheirismo, em especial ao Danilo/Catatau por ser um grande amigo e por todo
conhecimento útil e inútil trocado. Aos meus amigos de Prados, em especial às flores, ao
Bruninho e ao Tavinho agradeço pela amizade sólida e duradoura.
À minha amiga e guru espiritual Maria Bethânia agradeço por compartilhar a vida
comigo e por me ajudar no entendimento de mim mesma.
Ao Gustavo Fontaine e sua família pela acolhida no Rio de Janeiro, também
agradeço ao Gustavo por ter me apresentado os amigos Guilherme Lima e Antônio Ferraz.
À Escola Politécnica agradeço pelo privilégio e honra em estudar engenharia civil
na Universidade Federal do Rio de Janeiro. Aos meus professores Cláudia Eboli, Ricardo
Valeriano, Fernando Danziger e novamente ao Bruno Jacovazzo e ao Gilberto Ellwanger
agradeço por me inspirarem em cada uma de suas aulas.
À minha área de estudo, estruturas offshore, que tanto me encanta e desafia.

vii
Resumo do Projeto de Graduação apresentado à Escola Politécnica/UFRJ como parte dos
requisitos necessários para a obtenção do grau de Engenheiro Civil.
ANÁLISE COMPUTACIONAL DE SISTEMAS DINÂMICOS
OFFSHORE UTILIZANDO METODOLOGIA FRACAMENTE
ACOPLADA
Débora Ladeira
Setembro/2018
Orientador: Bruno Martins Jacovazzo
Curso: Engenharia Civil
RESUMO
O presente trabalho tem por objetivo o desenvolvimento de modelo computacional
em elementos finitos para analisar um sistema composto por uma boia submersa ancorada
que sustenta um conjunto de risers para exploração de petróleo e gás em águas profundas.
O objeto central do estudo é a modelagem do sistema no software Situa/Prosim 2 e aplicar
a metodologia fracamente acoplada no desenvolvimento das análises numéricas. Na
modelagem fracamente acoplada os componentes do sistema são tratados como corpos
isolados que interagem e a compatibilidade de deslocamentos em cada corpo isolado é
avaliada de forma a garantir a convergência do sistema numérico. Este trabalho introduz
o conceito de análise fracamente acoplada utilizando como referência o estudo de caso de
um sistema submarino complexo de exploração em águas profundas, sendo a principal
conclusão a de que o comportamento do sistema utilizando tal metodologia se mostrou
estável, podendo ser explorado no desenvolvimento de projetos de sistemas idênticos ou
semelhantes. Além da metodologia fracamente acoplada, outra abordagem de modelagem
computacional para sistemas dinâmicos offshore é apresentada como solução ao
problema, a metodologia fortemente acoplada, em que foram tratados os pontos principais
e as dificuldades inerentes ao problema.
Palavras-chave: análise computacional, sistemas offshore, metodologia fracamente
acoplada, metodologia fortemente acoplada, sistema BSR.

viii
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of the
requirements for degree of Civil Engineer.
COMPUTATIONAL ANALYSIS OF OFFSHORE DYNAMIC
SYSTEMS USING WEAKLY COUPLED METHODOLOGY
Débora Ladeira
September/2018
Advisor: Bruno Martins Jacovazzo
Course: Civil Engineering
ABSTRACT
The present study has an objective of develop a computational model in finite
elements for analyze a system composed by an anchored submerged buoy which supports
a group of risers for oil and gas exploration in deep water. The study central objective is
the system modeling in the software Situa/Prosim 2 and apply the slightly coupled
methodology in the development of the numerical analyses. In the slightly coupled
methodology the system components are treated as isolated bodies that interact and the
displacement compatibility in each isolated body is evaluate in order to ensure the
convergence of the numeric system. This study introduces the concept of slightly coupled
methodology using the case study of a complex subsea system in deep water as a
reference, the main conclusion being that the behavior of the system using such
methodology demonstrates to be stable, so can be exploited in the development of
identical or similar systems. In addition to the slightly coupled methodology, another
approach to computational modeling for offshore dynamic systems is presented as a
solution to the problem, the strongly coupled methodology, in which the main points and
difficulties inherent to the problem are treated.
Keywords: computational analyses, offshore systems, slightly coupled methodology,
strongly coupled methodology, BSR system.

ix
SUMÁRIO
1 INTRODUÇÃO .................................................................................................. 1
1.1 Contexto e Motivação .................................................................................................................. 1
1.2 Objetivos ....................................................................................................................................... 2
1.3 Estrutura do Trabalho ................................................................................................................. 2
1.4 O Situa/Prosim 2 .......................................................................................................................... 3
2 SISTEMAS OFFSHORE ................................................................................... 4
2.1 Plataformas Flutuantes ................................................................................................................ 4
2.1.1 TLP (Tension Leg Platform) ..................................................................................................... 5
2.1.2 Plataforma SPAR ...................................................................................................................... 6
2.1.3 Plataforma Semissubmersível ................................................................................................... 6
2.1.4 Navio Plataforma FPSO (Floating, Production, Storage and Offloading)................................ 7
2.2 Sistemas de Ancoragem ............................................................................................................... 8
2.2.1 Ancoragem em Catenária .......................................................................................................... 9
2.2.2 Ancoragem em Taut-Leg ........................................................................................................... 9
2.3 Risers ........................................................................................................................................... 10
3 DINÂMICA COMPUTACIONAL: METODOLOGIAS DE ANÁLISE .... 12
3.1 Introdução................................................................................................................................... 12
3.2 Equações de movimento ............................................................................................................ 12
3.2.1 Equação de Movimento do Casco ........................................................................................... 13
3.2.2 Equação de Movimento das Linhas ......................................................................................... 15
3.3 Metodologia Desacoplada .......................................................................................................... 16
3.4 Metodologia Fracamente Acoplada .......................................................................................... 19
3.5 Metodologia Fortemente Acoplada ........................................................................................... 22
4 ESTUDO DE CASO ......................................................................................... 24
4.1 Introdução................................................................................................................................... 24
4.2 O conceito BSR - Boia de Sustentação de Risers ..................................................................... 25
4.3 Estudo de Caso – Características do Sistema .......................................................................... 28
4.3.1 FPSO ....................................................................................................................................... 29
4.3.2 Localização da boia de sustentação de Risers ......................................................................... 30
4.3.3 Sistema de Risers e Jumpers ................................................................................................... 32
4.4 Dimensionamento Simplificado da Boia de Sustentação de Risers ........................................ 36
4.4.1 Equilíbrio de Forças Horizontais - Definição dos Tendões ..................................................... 36
4.4.2 Equilíbrio de Forças Verticais ................................................................................................. 40
4.4.3 Equilíbrio de Momentos .......................................................................................................... 44
4.4.4 Coeficientes Hidrodinâmicos .................................................................................................. 51
4.5 Análises Dinâmicas Fracamente Acopladas ............................................................................. 52
4.5.1 Carregamento Ambiental ........................................................................................................ 52

x
4.5.2 Movimentos da boia ................................................................................................................ 54
4.5.3 Esforços nas linhas .................................................................................................................. 62
5 TRABALHOS FUTUROS ............................................................................... 71
5.1 Malha em elementos finitos com formulação fortemente acoplada ....................................... 71
5.2 Modelo estrutural da malha de elementos finitos .................................................................... 77
6 CONCLUSÕES E CONSIDERAÇÕES FINAIS .......................................... 78
7 REFERÊNCIAS BIBLIOGRÁFICAS ........................................................... 79
ANEXO I ....................................................................................................................... 82
ANEXO II ...................................................................................................................... 85
xi
ÍNDICE DE FIGURAS
Figura 2.1 - Representação de alguns Sistemas Offshore [2] ........................................... 4
Figura 2.2 - Plataforma TLP (Tension Leg Platform) ...................................................... 5
Figura 2.3 - Plataforma SPAR .......................................................................................... 6
Figura 2.4 - Plataforma Semissubmersível ....................................................................... 7
Figura 2.5 - Plataforma FPSO (Floating, Produciton, Storage and Offloading) [4] ....... 8
Figura 2.6 - Spread Mooring - Tendões (TLP) ................................................................ 8
Figura 2.7 - Sistema de ancoragem - Catenária [2] .......................................................... 9
Figura 2.8 - Sistema de ancoragem - Taut-leg [2] .......................................................... 10
Figura 2.9 - Risers (a) Rígidos (b) Flexíveis .................................................................. 10
Figura 3.1 - Graus de liberdade do casco [2] .................................................................. 13
Figura 3.2 - Análise Hidrodinâmica do casco (Metodologia Desacoplada) [4] ............. 17
Figura 3.3 - Análise Estrutural Desacoplada das linhas de ancoragem e Risers [6] ...... 18
Figura 3.4 - Etapas da Análise Estrutural Desacoplada ................................................. 18
Figura 3.5 - Análise Estrutural Acoplada [4] ................................................................. 20
Figura 3.6 - Etapas da Análise Estrutural Fracamente Acoplada ................................... 21
Figura 3.7 - Análise Estrutural Fortemente Acoplada .................................................... 22
Figura 4.1 - Sistema BSR - Boia de Sustentação de Risers [23] .................................... 25
Figura 4.2 - Concepção do Sistema BSR no SITUA/Prosim 2 ...................................... 29
Figura 4.3 - Unidade Flutuante modelada ...................................................................... 30
Figura 4.4 - Localização Sistema BSR no SITUA/Prosim 2 .......................................... 31
Figura 4.5 - Perímetro externo da Boia de Sustentação de Risers .................................. 31
Figura 4.6 - Jumpers - sistema simétrico ........................................................................ 33
Figura 4.7 - Diagrama de Forças Horizontais (sem considerar a boia) - vista lateral .... 37
Figura 4.8 - Linhas do Sistema BRS - Situa/Prosim 2 ................................................... 39
Figura 4.9 - Linhas do Sistema BRS - Situa/Prosim 2 ................................................... 40
Figura 4.10 - Diagrama de Forças (sem considerar a boia) - vista lateral ...................... 41
Figura 4.11 - Cilindros que compõem a boia - vista lateral ........................................... 45
Figura 4.12 - Vista lateral da boia - Empuxos atuantes .................................................. 46
Figura 4.13 - Somatório de Momentos no eixo X .......................................................... 47

xii
Figura 4.14 - Boia de Sustentação de risers modelada no Situa/Prosim 2 ..................... 50
Figura 4.15 – Carregamentos ambientais aplicados – Convenção de correntezas ......... 53
Figura 4.16 – Movimentos da Boia de Sustentação de Risers – vista isométrica no
Situa/Prosim 2 ................................................................................................................ 54
Figura 4.17 – Deslocamento em X da Boia de Sustentação de Risers ........................... 56
Figura 4.18 – Deslocamento em Y da Boia de Sustentação de Risers ........................... 57
Figura 4.19 – Deslocamento em Z da Boia de Sustentação de Risers............................ 58
Figura 4.20 – Rotação em X da Boia de Sustentação de Risers ..................................... 59
Figura 4.21 – Rotação em Y da Boia de Sustentação de Risers ..................................... 60
Figura 4.22 – Rotação em Z da Boia de Sustentação de Risers ..................................... 61
Figura 4.23 – Envoltória de Trações Mínimas nos jumpers ........................................... 63
Figura 4.24 – Envoltória de Trações Mínimas nos risers............................................... 63
Figura 4.25 – Envoltória de Trações Máximas nos jumpers .......................................... 64
Figura 4.26 – Envoltória de Trações Máximas nos risers .............................................. 65
Figura 4.27 – Envoltória de Trações Mínimas nos jumpers – direção leste ................... 66
Figura 4.28 – Envoltória de Trações Mínimas nos risers – direção leste ...................... 66
Figura 4.29 – Envoltória de Trações Máximas nos jumpers – direção leste .................. 67
Figura 4.30 – Envoltória de Trações Máximas nos risers – direção leste ...................... 67
Figura 4.31 – Tendões .................................................................................................... 68
Figura 4.32 – Tração no topo do tendão 1 ...................................................................... 69
Figura 4.33 – Tração no topo do tendão 2 ...................................................................... 69
Figura 4.34 – Tração no topo do tendão 3 ...................................................................... 70
Figura 4.35 – Tração no topo do tendão 4 ...................................................................... 70
Figura 5.1 - Malha de elementos finitos da boia e dummy members.............................. 72
Figura 5.2 - Malha de elementos finitos da boia e dummy members - Rigidez no eixo XY
........................................................................................................................................ 73
Figura 5.3 - Malha de elementos finitos da boia e dummy members - Rigidez no eixo YZ
........................................................................................................................................ 74
Figura 5.4 - Malha de elementos finitos da boia e dummy members - Rigidez no eixo XZ
........................................................................................................................................ 75
Figura 5.5 - Malha de elementos finitos completa da boia e dummy members .............. 76

xiii
ÍNDICE DE TABELAS
Tabela 4.1 - Dimensões do FPSO ................................................................................... 30
Tabela 4.2 - Linhas do Sistema BSR .............................................................................. 32
Tabela 4.3 - Conexões dos Jumpers ............................................................................... 34
Tabela 4.4 - Conexões dos Risers ................................................................................... 34
Tabela 4.5 - Ângulo de Topo dos Risers ........................................................................ 35
Tabela 4.6 - Forças Horizontais nas linhas ..................................................................... 38
Tabela 4.7 - Definição das Forças nos Tendões - Equilíbrio de forças horizontais ....... 39
Tabela 4.8 - Forças Verticais nas linhas ......................................................................... 43
Tabela 4.9 - Dimensionamento simplificado da boia - equilíbrio de forças verticais .... 44
Tabela 4.10 - Dimensionamento teórico da boia de sustentação de Risers .................... 48
Tabela 4.11 - Dimensionamento prático da boia de sustentação de Risers .................... 49
Tabela 4.12 - Dimensionamento da boia de sustentação de Risers ................................ 49
Tabela 4.13 - Movimentos da boia de sustentação de Risers ......................................... 50
Tabela 4.14 - Coeficientes hidrodinâmicos dos cilindros............................................... 51
Tabela 4.15 - Casos de carregamento ambiental ............................................................ 52
Tabela 4.16 – Movimentos da Boia de Sustentação de Risers ....................................... 55
Tabela 4.17 – Envoltórias de esforços nas linhas ........................................................... 62
Tabela 4.18 – Maiores esforços nas linhas (por função) na direção leste ...................... 65
Tabela 4.19 – Trações nos Tendões ............................................................................... 68

1
1 INTRODUÇÃO
1.1 Contexto e Motivação
No atual contexto tecnológico, o avanço computacional se tornou um importante
aliado da engenharia, possibilitando a compreensão de sistemas complexos antes
incalculáveis sem o auxílio de ferramentas computacionais. Tendo em vista que os
programas computacionais são amplamente utilizados em projetos de engenharia, faz-se
necessário o conhecimento dos softwares e dos métodos numéricos envolvidos,
principalmente o método dos elementos finitos.
Os softwares em elementos finitos, cada vez mais robustos como apresentado em
[1], possibilitam que o engenheiro modele sistemas que se aproximam da realidade com
um nível de precisão que varia de acordo com o tipo de modelagem e análise. A
engenharia civil avançou bastante desde que o uso dos softwares em elementos finitos se
tornou uma prática no projeto, seja de edifícios, pontes, obras de terra, estradas, etc.
Sistemas hiperestáticos sujeitos a vários carregamentos, inclusive carregamentos
dinâmicos, podem ser simulados aplicando a abordagem em elementos finitos com
agilidade e precisão.
Uma importante área da engenharia que também pôde se desenvolver com o
avanço computacional é o setor energético. Embora exista uma crescente preocupação
em mudar a matriz energética, a fim de utilizar fontes renováveis de energia, o petróleo
ainda é a fonte de energia mais usada no mundo. Há uma grande quantidade de campos
offshore descobertas a serem exploradas, além dos poços já perfurados do chamado pré-
sal.
A exploração offshore de petróleo e gás evoluiu muito desde que começou em
lâminas d’água rasas com as plataformas fixas. Atualmente é possível extrair petróleo e
gás de profundidades enormes, como é o caso do pré-sal brasileiro. A lâmina d’água pode
chega a ser mais de 2.000 metros, além da camada salina que deve ser vencida para a
extração.
O avanço da lâmina d’água trouxe desafios para a engenharia, se tornando
estruturalmente e economicamente interessante o uso de plataformas flutuantes [2]. Estes
sistemas estruturais complexos podem ser modelados e analisados em softwares que
aplicam a abordagem em elementos finitos sendo o seu uso disseminado na indústria do
petróleo. As plataformas flutuantes contam geralmente com um sistema de ancoragem
fixo, sistema de extração composto por risers e equipamentos submarinos para
escoamento da produção do leito marinho até a plataforma e uma planta de processo e
armazenamento.

2
1.2 Objetivos
Este trabalho tem o objetivo de aplicar a metodologia de acoplamento dinâmico e
análise em elementos finitos de um sistema submarino complexo para exploração de óleo
e gás em águas profundas. Com o objetivo de estudar o comportamento da metodologia,
optou-se por elaborar um modelo computacional utilizando a metodologia fracamente
acoplada. Outras abordagens são apresentadas como a metodologia desacoplada e a
metodologia fortemente acoplada, que teve uma atenção especial nesse trabalho onde
foram tratados os pontos principais e as dificuldades inerentes ao problema.
O sistema em estudo é composto por uma boia submersa ancorada que suporta risers
e jumpers para escoamento de petróleo e gás, além de linhas de controle de poço, a serem
destinados a um FPSO convencional ancorado, os umbilicais. O sistema se situa em
lâmina d’água profunda de 1.800 m.
O programa a ser utilizado nas simulações computacionais é o Situa/Prosim 2
apresentado em [1] que permite ao usuário uma liberdade de modelagem, podendo ser
introduzidas as opções de metodologia desacoplada, fracamente acoplada ou fortemente
acoplada. As metodologias diferem no que tange a interação entre os componentes do
sistema, sua precisão e custos computacionais de cada tipo de simulação.
A versatilidade das metodologias computacionais proporciona ao engenheiro
escolher entre as formas de modelagem, levando em consideração a fase do projeto, seus
componentes críticos, o nível de precisão exigido e o cronograma do mesmo. Por
exemplo, um modelo fracamente acoplado exige um custo computacional e de
modelagem menor que um modelo fortemente acoplado.
O desenvolvimento do trabalho toma como base a metodologia fracamente
acoplada desenvolvida no Situa/Prosim 2 para o estudo de caso do sistema proposto, além
de considerações sobre o desenvolvimento de uma possível malha em elementos finitos
para a simulação computacional usando a metodologia fortemente acoplada para o
mesmo sistema offshore em estudo.
1.3 Estrutura do Trabalho
No capítulo 2 são introduzidos alguns conceitos sobre sistemas offshore e os
componentes relevantes para o estudo e desenvolvimento deste trabalho.
O capítulo 3 explica metodologias de modelagem e análise de sistemas
computacionais, dentre elas a desacoplada, a fracamente acoplada e a fortemente
acoplada. Apresentam-se também alguns conceitos matemáticos essenciais ao
entendimento das metodologias.
O capítulo 4 detalha o estudo de caso, apresentando a concepção e
dimensionamento simplificado do sistema. Os resultados das simulações numéricas

3
dinâmicas são apresentados juntamente a uma análise destes resultados em termos
qualitativos.
O capítulo 5 propõe um esquema estrutural para modelagem do sistema offshore
do estudo de caso utilizando a metodologia fortemente acoplada, a ser modelado e
analisado em trabalhos futuros.
O capítulo 6 apresenta as conclusões do trabalho desenvolvido, relacionando os
resultados obtidos nas análises dinâmicas com o dimensionamento simplificado do
sistema proposto.
1.4 O Situa/Prosim 2
O Situa/Prosim é um programa de análise estrutural de sistemas offshore que
permite ao usuário escolher entre as metodologias de análise desacoplada, fracamente
acoplada e fortemente acoplada.
O Prosim (rotina computacional do software) vem sendo desenvolvido em
parceria entre a Petrobras e o LAMCSO - Laboratório de Métodos Computacionais e
Sistemas Offshore, do PEC/COPPE/UFRJ desde 1997. O Situa é a interface gráfica que
alimenta o programa de análise Prosim. O SITUA/Prosim já vem sendo largamente
empregado em diversos projetos de sistemas offshore desde sua primeira versão.
O Prosim permite a utilização de metodologia acoplada desde a sua primeira
versão, o Situa/Prosim 1 de 2007; a versão Situa/Prosim 2 foi recentemente lançada, em
2017, e adotada para ser utilizada neste estudo.

4
2 SISTEMAS OFFSHORE
Entende-se por Sistema Offshore o conjunto dos componentes presentes em alto
mar para realizar alguma atividade, não necessariamente ligada à exploração de petróleo
e gás. Atualmente já existe geração de energia eólica offshore como mostrado em [3],
que se desenvolve com bases teóricas e práticas de projeto semelhantes aos sistemas
offshore de exploração de petróleo e gás.
Na modelagem de um sistema offshore para exploração de petróleo e gás
encontram-se basicamente quatro componentes: as plataformas, as linhas de ancoragem,
os risers e os equipamentos submarinos, representados na Figura 2.1. As plataformas
podem ser flutuantes, ou não, como o caso das plataformas fixas; as linhas de ancoragem
têm função de sustentar as plataformas flutuantes; e os risers e equipamentos submarinos
fazem parte do sistema de produção.
/
Figura 2.1 - Representação de alguns Sistemas Offshore [2]
2.1 Plataformas Flutuantes
O primeiro conceito de plataforma marítima para exploração de petróleo foi de
plataformas fixas, situadas em lâminas d’água hoje consideradas rasas, em torno de até
100 m. As plataformas fixas podem ser de aço ou de concreto. Devido a sua alta rigidez
e pequenas deformações observadas, os efeitos devido aos carregamentos ambientais
extremos na estrutura são pouco significativos [2].

5
Com a necessidade de exploração em campos petrolíferos mais profundos, a
instalação de plataformas fixas deixou de ser técnica e economicamente viável. Assim,
outras concepções foram desenvolvidas para viabilizar a escalada produtiva, como por
exemplo, os sistemas flutuantes de produção conforme [2].
Alguns conceitos de plataformas flutuantes existentes são apresentados a seguir:
➢ TLP (Tension Leg Platform);
➢ Plataforma SPAR;
➢ Plataforma Semissubmersível;
➢ Navio Plataforma FPSO (Floating, Production, Storage and Offloading).
2.1.1 TLP (Tension Leg Platform)
A TLP é uma plataforma sustentada por ancoragem tensionada. Suas linhas de
ancoragem são verticais e denominadas tendões. Este sistema de ancoragem faz com que
a unidade flutuante seja menos sensível aos efeitos dinâmicos dos carregamentos
ambientais, porém os tendões, que são fixados no solo por estacas, são um tipo de
ancoragem mais complexa e onerosa quando comparada a uma ancoragem convencional,
fixada por âncoras [2].
A unidade flutuante é composta por pontoons de flutuação que proporcionam o
empuxo elevado à plataforma. Nota-se que é importante não variar muito o peso do
sistema, por isso a TLP não tem capacidade de armazenamento da produção, sendo
destinada apenas à produção.
Figura 2.2 - Plataforma TLP (Tension Leg Platform)
Fonte: https://masqueingenieria.com/blog/tipos-estructuras-offshore/

6
2.1.2 Plataforma SPAR
A plataforma flutuante denominada SPAR tem um casco cilíndrico de aço e
sistema de ancoragem tensionada. Ela opera com calado (casco cilíndrico) profundo e
constante, o que promove um aumento da estabilidade da plataforma, desta forma os
movimentos verticais (deslocamento em Z) da unidade flutuante são baixos. Estes
pequenos movimentos verticais possibilitam a utilização de risers rígidos na produção
conforme [4] e a completação seca, em que se tem árvore de natal localizada sobre a
plataforma. Ao contrário da TLP, a SPAR tem capacidade de armazenamento da
produção de petróleo, porém esta capacidade é pequena.
Figura 2.3 - Plataforma SPAR
Fonte: http://macacaolaranja.blogspot.com/2013/05/gigante-perdido.html
2.1.3 Plataforma Semissubmersível
O casco da semissubmersível, Figura 2.4, se assemelha ao da TLP; os pontoons
da base se apoiam em colunas cilíndricas contraventadas, este conjunto fornece suporte à
estrutura do convés [2]. Como a estrutura da unidade flutuante se assemelha à da TLP, a
semissubmersível tem a mesma limitação do peso no convés, portanto também não tem
capacidade de armazenamento da produção. As duas unidades flutuantes se diferem no
que diz respeito à ancoragem, já que a semissubmersível tem ancoragem convencional e
a TLP é ancorada por tendões tracionados.

7
Figura 2.4 - Plataforma Semissubmersível
Fonte: https://www.manutencaoesuprimentos.com.br/energia-de-combustiveis-fosseis-na-producao-
de-eletricidade/
2.1.4 Navio Plataforma FPSO (Floating, Production, Storage and Offloading)
Das unidades flutuantes apresentadas até agora, apenas a SPAR apresenta
capacidade de armazenamento da produção de petróleo. Faz-se necessário escoar esta
produção e a opção de oleodutos que liguem as plataformas à costa se torna cada vez mais
inviável quanto mais distante os poços de produção estiverem da costa.
Para atender a esta demanda de armazenamento e alívio da produção surgiu o
FPSO. Este sistema apresenta a concepção de um navio e em muitos casos são utilizados
navios que foram convertidos a partir de embarcações petroleiras. Faz-se uso de navio
ancorado que suporta em seu convés uma planta de processo para separação de fluidos,
armazena o óleo produzido e permite o escoamento da produção para outro navio,
chamado aliviador, que é periodicamente conectado ao FPSO para receber e transportar
o óleo até os terminais petrolíferos [5].
8
Figura 2.5 - Plataforma FPSO (Floating, Produciton, Storage and Offloading) [4]
2.2 Sistemas de Ancoragem
O sistema de ancoragem é responsável pela restauração da unidade flutuante à
posição de projeto quando a resultante ambiental faz com que a plataforma se desloque
de sua posição de equilíbrio. As linhas podem ser de materiais diferentes, gerando
diferentes conceitos de amarração. Os materiais usuais empregados nas linhas de
ancoragem são: amarras, cabos de aço e cabos de poliéster.
Três tipos de sistemas de ancoragem podem ser adotados em plataformas
flutuantes, como: amarração com quadro de ancoragem Spread Mooring, amarração em
ponto único denominado Single Point Mooring e Posicionamento Dinâmico conforme
[2].
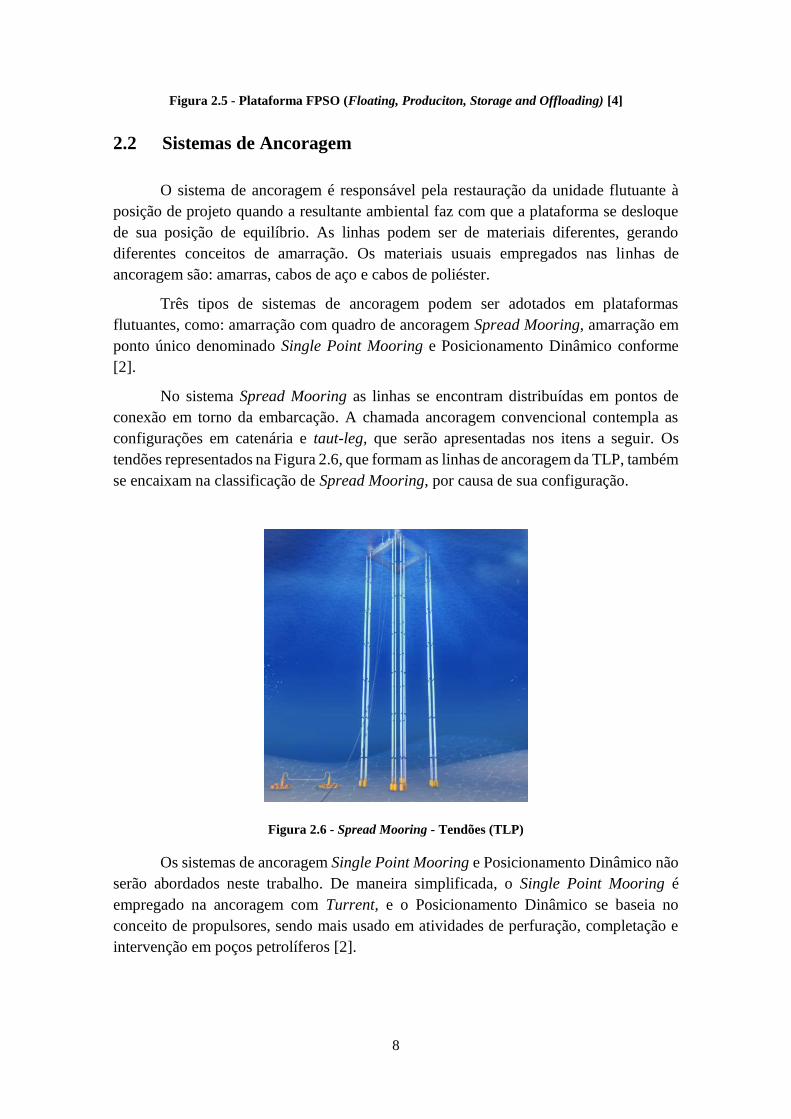
No sistema Spread Mooring as linhas se encontram distribuídas em pontos de
conexão em torno da embarcação. A chamada ancoragem convencional contempla as
configurações em catenária e taut-leg, que serão apresentadas nos itens a seguir. Os
tendões representados na Figura 2.6, que formam as linhas de ancoragem da TLP, também
se encaixam na classificação de Spread Mooring, por causa de sua configuração.
Figura 2.6 - Spread Mooring - Tendões (TLP)
Os sistemas de ancoragem Single Point Mooring e Posicionamento Dinâmico não
serão abordados neste trabalho. De maneira simplificada, o Single Point Mooring é
empregado na ancoragem com Turrent, e o Posicionamento Dinâmico se baseia no
conceito de propulsores, sendo mais usado em atividades de perfuração, completação e
intervenção em poços petrolíferos [2].

9
2.2.1 Ancoragem em Catenária
A configuração em catenária é caracterizada pela curvatura da linha quando
conectada à unidade flutuante e apoiada no solo, esta curvatura se dá pelo peso próprio
da linha constituída por amarras e cabos de aço ou poliéster. A ancoragem em catenária
permite maiores passeios à plataforma, em decorrência de sua flexibilidade [4]. Um
arranjo do tipo Spread Moorging em catenária está ilustrado na Figura 2.7.
Figura 2.7 - Sistema de ancoragem - Catenária [2]
2.2.2 Ancoragem em Taut-Leg
As linhas de ancoragem do tipo taut-leg normalmente são constituídas de cabos
de poliéster ou outro material polimérico. Portanto, apresentam grande elasticidade axial
e estão constantemente tracionadas para garantir a restauração hidrostática da unidade
flutuante, proporcionando maior rigidez ao sistema. A configuração do tipo taut-leg se
diferencia da catenária por não apresentar a curvatura típica da catenária, uma vez que as
taut-legs não são apoiadas no solo. Enquanto o atrito das catenárias com o solo absorve
grande parte dos esforços horizontais, as taut-legs necessitam de âncoras que suportem
as cargas horizontais mais elevadas.
O fato das taut-legs estarem submetidas à trações mais elevadas que as catenárias
faz com que as linhas de ancoragem do tipo taut-leg imprimam uma força horizontal
maior à unidade flutuante, gerando um menor passeio da embarcação. Quanto maior a
força que as linhas de ancoragem imprimem à plataforma, menos complacente esta será,
assegurando passeios menores.

10
Figura 2.8 - Sistema de ancoragem - Taut-leg [2]
2.3 Risers
Os risers são dutos de exploração por onde passam fluidos e estão situados entre
a unidade de produção e o leito marinho. Há os dutos de produção de petróleo e gás, e
também os dutos de injeção de água e gás nos poços de injeção, que operam para a
garantia das pressões necessárias para uma produção projetada. Os risers são dutos
esbeltos que apresentam configuração em catenária, logo, estão suspensos pela unidade
flutuante e apoiados no solo. O projeto dos risers deve assegurar que os dutos resistam
tanto às forças estáticas inerentes à sua configuração quanto às dinâmicas exercidas pela
unidade flutuante e pelos carregamentos ambientais [2].
Risers rígidos e risers flexíveis, conforme apresentados na Figura 2.9, se
diferenciam pelo material, comportamento estrutural e aplicação, tornando-os mais
adequados às diferentes aplicações offhosre. Os risers rígidos, Figura 2.8 (a) são de aço
e formados por uma série de juntas soldadas com aproximadamente 12 metros de
comprimento [2].
Figura 2.9 - Risers (a) Rígidos (b) Flexíveis
Os flexíveis são compostos pela superposição de várias camadas de materiais
metálicos e poliméricos. As camadas poliméricas são responsáveis pela estanqueidade
a) b)

11
interna e externa do duto, conforme ilustrado na Figura 2.9 (b), e as camadas metálicas
espiraladas, chamadas de armaduras, pela resistência mecânica aos carregamentos que o
riser estará submetido.
Em relação ao custo, os risers flexíveis são consideravelmente mais caros do que
os risers rígidos em razão do processo de fabricação e dos materiais presentes nas
camadas. Entretanto, a instalação dos risers rígidos tem um custo maior que dos flexíveis.
No que diz respeito às características mecânicas, os risers flexíveis apresentam uma
menor restrição à curvatura, porém apresentam resistências axial, torsional e flexional
menores quando comparados aos rígidos.
O raio mínimo de curvatura admissível faz com que os risers flexíveis suportem
melhor os deslocamentos impostos pelas fases de instalação e operação, portanto suas
características mecânicas são mais bem aproveitadas em lâminas d’água rasas. Já o riser
rígido, que apresenta resistências mais altas devido à baixa flexibilidade, suporta bem a
pressão devida a uma coluna d’água muito alta, como é o caso de lâminas d’água ultra-
profundas.

12
3 DINÂMICA COMPUTACIONAL: METODOLOGIAS DE
ANÁLISE
3.1 Introdução
Neste capítulo são apresentadas metodologias de análise computacional em
elementos finitos de um sistema composto por uma unidade flutuante e linhas de
ancoragem e risers. Alguns conceitos de hidrodinâmica fundamentais ao entendimento
da modelagem e análise são introduzidos primeiramente no item 3.2. Têm-se as
metodologias acoplada e desacoplada, no entanto o estudo de caso deste trabalho é
desenvolvido apenas com metodologia acoplada por se tratar da metodologia mais
robusta e eficiente na resolução de sistemas offshore situados em lâminas d’água
profundas.
O MEF (Método dos Elementos Finitos) se baseia na subdivisão dos elementos
constituintes do sistema em elementos menores, para resolução dos sistemas de equações
que gerem o sistema estrutural. Esta subdivisão é comumente chamada de discretização,
e o usuário pode escolher uma malha mais ou menos refinada dependendo do objetivo
que pretende alcançar. Vantagens e desvantagens do refinamento dos elementos podem
ocorrer associados a ganho de precisão, diminuição de problemas de convergência, ou
maior custo computacional.
No Situa/Prosim as equações diferencias que regem o problema de engenharia são
resolvidas no domínio do tempo, e a convergência avaliada através da diferença entre o
instante de tempo tn+1 e tn considerando o erro máximo do valor do parâmetro a qual o
erro está associado. Outro parâmetro importante da simulação é a quantidade de iterações
que o software realiza até que se chegue ao erro permitido e, juntamente ao refinamento
das malhas, influenciam na velocidade de processamento das simulações.
As metodologias de cálculo foram bem definidas por BAHIENSE [2], FARIAS
[4] e LIMA [6], sendo estas as principais referências bibliográficas para o presente
trabalho.
3.2 Equações de movimento
A unidade flutuante é tratada como casco nos modelos fracamente acoplados,
sendo modelada como corpo rígido que tem seis graus de liberdade associados aos
deslocamentos e rotações. As linhas são representadas por elementos de barra com seus
graus de liberdade inerentes. Nos modelos em elementos finitos existe um sistema de
coordenadas global principal no qual todos os outros sistemas locais estão referenciados.
Tanto o casco quanto as linhas apresentam os seus próprios sistemas locais independentes
conforme será detalhado no procedimento de modelagem fracamente acoplada.

13
3.2.1 Equação de Movimento do Casco
O sistema estrutural de uma unidade flutuante pode ser representado por um corpo
rígido com seis graus de liberdade no modelo fracamente acoplado em elementos finitos.
Existem algumas terminologias usuais para a denominação dos seis movimentos de uma
plataforma, listadas a seguir e ilustradas na Figura 3.1:
• Deslocamento em X: movimento linear do corpo ao longo de seu eixo
longitudinal.
• Deslocamento em Y: movimento linear do corpo ao longo de eixo
transversal.
• Deslocamento em Z: movimento linear do corpo ao longo de seu eixo
vertical.
• Rotação em X: movimento de rotação em torno de seu eixo longitudinal.
• Rotação em Y: movimento de rotação em torno de seu eixo transversal.
• Rotação em Z: movimento de rotação em torno de seu eixo vertical.
Figura 3.1 - Graus de liberdade do casco [2]
A análise do casco é realizada através da integração numérica das equações de
movimento de corpo rígido. Neste item é apresentada a equação de movimento de uma
unidade flutuante contemplando algumas considerações sobre os métodos matemáticos
aplicados na modelagem para a resolução da equação diferencial.
Os movimentos citados acima são referenciados a dois eixos, o global e o local.
O sistema global da modelagem OXYZ é fixado na Terra (sistema inercial) e o sistema
de coordenadas locais do casco oxyz será fixado no centro de gravidade (CG) da
plataforma. Os movimentos de translação e as rotações são expressas pelo sistema local
que se desloca acompanhando os movimentos de corpo rígido do casco.

14
Portanto, a resultante de translação e a resultante de rotação representam o
movimento de corpo rígido do casco. A aplicação da segunda lei de Newton resulta numa
equação diferencial para o movimento da plataforma. .
A equação diferencial de movimento do casco em relação ao sistema de
coordenadas local oxyz, que tem origem no CG da unidade flutuante, é escrita como
apresentada em [7] e na equação (3.1). A equação (3.1) considera que o aproamento da
unidade flutuante é zero, assim o sistema local será originalmente paralelo ao sistema
global.
𝐌�� = 𝐅𝐈 + 𝐅𝐯 + 𝐅𝐜 + 𝐅𝐎 + 𝐅𝐝𝐦 + 𝐅𝐝𝐥 + 𝐅𝐫𝐞𝐬 + 𝐅𝐩𝐨𝐭 + 𝐅𝐚𝐧 + 𝐅𝐀𝐂 + 𝐅𝐃𝐂 (3.1)
Onde:
M - Matriz de Massa do casco
U - Vetor de Acelerações
FI - Força inercial adicional, decorrente da análise em um sistema não inercial
Fv - Força do vento
Fc - Força de corrente mais amortecimento viscoso
FO - Força de onda de primeira ordem
Fdm - Força de deriva média das ondas
Fdl - Força de deriva lenta das ondas
Fres - Força de restauração hidrostática
Fpot - Força de amortecimento potencial
Fam - Força elástica e inercial das linhas
FAC - Força de amortecimento nas linhas
FDC - Força de arraste nas linhas
Todas as forças atuantes no casco podem ser encontradas detalhadamente em [8].
A simetria do navio torna a resolução da equação de movimentos mais simples, uma vez
que ela é solucionada em relação ao sistema de coordenadas local representado na Figura
3.1. O fato do sistema local se originar no centro de gravidade da estrutura traz uma série
de simplificações aos cálculos, como nas expressões de inércia do sistema [9]. Além
disso, a massa adicional e os coeficientes das forças hidrostáticas, hidrodinâmicas e
aerodinâmicas são considerados em relação ao sistema local da unidade.
Uma das dificuldades da análise do sistema flutuante se dá pela complexidade da
consideração dos efeitos hidrodinâmicos lineares e não lineares gerados no casco pelas
ondas. Na metodologia desacoplada, que será descrita adiante, as parcelas de força de
onda, inclusive de restauração hidrostática, são calculadas a partir de coeficientes pré-

15
determinados através de programas baseados na teoria potencial de difração da onda,
como o Wamit, conforme observado em [10]. Desta maneira, faz-se necessário o uso de
mais de um software para a análise estrutural da unidade e as não linearidades das forças
de onda de primeira ordem e hidrostática não são consideradas, sendo esta uma das
desvantagens da formulação desacoplada.
Existem diversos métodos de integração para solucionar a equação diferencial de
movimento do casco, equação (3.1), sendo utilizado no Prosim o método explícito de
Runge-Kutta de quarta ordem, apresentado em [11].
3.2.2 Equação de Movimento das Linhas
Após a equação do movimento do casco ter sido descrita no item acima, será
apresentado abaixo de maneira sucinta como as linhas de ancoragem e risers são
considerados em um modelo de elementos finitos de simulação numérica computacional.
Cada linha tem seu sistema local, assim como a unidade flutuante, e a descrição
matemática se dá por um sistema de equações diferencias parciais, que descreve as
equações de movimento, e um sistema de condições inicias e de contorno [2]. Para o
cálculo da resposta estrutural dinâmica das linhas existe uma técnica usual chamada
“semi-discretização” independente, em que as equações de movimento são primeiramente
discretizadas no espaço pelo método dos elementos finitos - MEF conforme [12], e em
seguida discretizadas no tempo por um algoritmo de integração como Newmark [13].
O conceito do método dos elementos finitos é a subdivisão da estrutura em
subdomínios discretos, tornando as incógnitas limitadas e resolvidas para um número
finito de pontos. Para a discretização espacial de risers e linhas de ancoragem o Prosim
dispõe de elementos reticulados de treliça e pórtico. A consideração de qual tipo de
elemento utilizar depende das propriedades mecânicas das linhas. No Situa/Prosim 2, por
enquanto, todos os elementos são considerados elementos de pórtico.
Assim como a equação de movimentos do casco, as equações diferenciais
precisam passar por um processo de integração numérica para serem solucionadas.
Integrar no tempo significa discretizar as equações de movimento, supondo que o
equilíbrio é satisfeito apenas em um determinado número de instantes tn+1 separados por
intervalos discretos, obtendo-se assim, a resposta em termos de deslocamentos,
velocidades e acelerações ao longo do domínio e para cada intervalo de tempo [2]. A
equação diferencial parcial e o problema de valor inicial para cálculo estrutural das linhas
são apresentados na equação (3.2).
𝐌��(𝐭) + 𝐂��(𝐭) + 𝐊𝐮(𝐭) = 𝐅(𝐭) (3.2)
Onde:
M - Matriz de massa

16
C - Matriz de amortecimento
K - Matriz de rigidez
u(t) - Vetor de aceleração da linha
u(t) - Vetor de velocidade da linha
u(t) - Vetor de deslocamento da linha
𝐹(𝑡) - Vetor de forças externas
O problema de valor inicial é definido pelas condições estabelecidas na equação
(3.3).
𝑢(0) = 𝑢0
��(0) = 𝑣0 (3.3)
Onde:
𝑢0 - Deslocamento inicial
𝑣0 - Velocidade inicial
As matrizes de massa e amortecimento são mantidas constantes no tempo; e a
matriz de rigidez é atualizada a cada passo de tempo, segundo a formulação não-linear.
As matrizes de massa e rigidez são deduzidas diretamente da formulação de elementos
finitos, enquanto a matriz de amortecimento é expressa a partir de uma combinação linear
das matrizes de massa e rigidez, através da expressão de amortecimento de Rayleigh.
Finalmente empregando um algoritmo de integração apropriado obtém-se a resposta
estrutural de cada linha separadamente.
3.3 Metodologia Desacoplada
Na metodologia desacoplada as respostas estruturais do casco e das linhas de
ancoragem e risers são calculadas em softwares diferentes, existe uma série de
simplificações nas considerações de ambas as estruturas, principalmente no que diz
respeito à interação entre o casco e as linhas. Por ser menos robusta que as demais
metodologias, a formulação desacoplada apresenta um custo computacional menor.
A primeira fase de uma análise desacoplada é a obtenção dos movimentos do
casco, apresentada esquematicamente na Figura 3.2. Primeiramente, em termos de
deslocamento estático e de componentes de onda, realiza-se uma análise hidrodinâmica
do casco e em seguida são considerados todos os carregamentos ambientais: onda, vento
e correnteza.

17
Figura 3.2 - Análise Hidrodinâmica do casco (Metodologia Desacoplada) [4]
Conforme ilustrado na Figura 3.2, as linhas de ancoragem e risers são
considerados simplificadamente no modelo hidrodinâmico do casco, as linhas são
representadas por coeficientes escalares de massa, rigidez e amortecimento na equação
de movimento da unidade flutuante. Nesta formulação o comportamento não linear da
interação entre o casco e as linhas não é considerado na análise do casco, assim como o
comportamento hidrodinâmico estrutural das linhas de ancoragem e risers.
A análise do casco é dividida em duas etapas de forma a considerar todos os
carregamentos ambientais atuantes. A primeira é realizada em programas baseados na
Teoria Potencial, como o Wamit [8] e o Wadam [14], em que os coeficientes escalares
que representam as linhas entram em funções de transferência de forças atuantes no casco.
Tais softwares consideram apenas a atuação das ondas; os movimentos do casco são
obtidos em termos destas funções de transferência, que constituem o RAO, resposta
estrutural do navio devido à onda de amplitude unitária.
No Situa/Prosim o RAO obtido em [8] ou [14] é importado para unidades
flutuantes modeladas como casco, como o FPSO. Porém para estruturas modeladas pela
formulação de cilindros, como as semissubmersíveis e a boia de sustentação de risers do
estudo de caso deste trabalho, não é necessário importar o RAO. Uma vez que na
formulação de Morison para cilindros os efeitos de onda são considerados na equação de
movimento dos cilindros, o Prosim não necessita do input de dados de outro software.
A segunda etapa da análise de movimento do casco do navio é processada em
softwares como Situa/Prosim [1], o Simo [15] e o Dynasim [16], que consideram os
coeficientes gerados na primeira etapa de cálculo. Finalmente a equação de movimento
de corpo rígido do casco é resolvida numericamente, sendo este submetido aos
carregamentos ambientais de onda, vento e correnteza e, a contribuição de forças
advindas das linhas é considerada linearmente nesta etapa.
Os movimentos do casco definidos previamente entram como condições de
contorno na análise estrutural das linhas de ancoragem e risers, realizadas em programas
em elementos finitos como o Situa/Prosim [1], o Anflex [17] e o Riflex [18]. Os

18
carregamentos ambientais atuantes nas linhas, e.g. ondas e correnteza, são considerados
e as condições de contorno advindas do comportamento do casco são imputadas no topo
de cada linha, analisadas individualmente em seguida. A Figura 3.3 apresenta um
esquema de representação das linhas para análise estrutural.
Figura 3.3 - Análise Estrutural Desacoplada das linhas de ancoragem e Risers [6]
O processo completo a que os componentes do sistema offshore são submetidos
durante uma análise desacoplada é resumido na Figura 3.4.
Figura 3.4 - Etapas da Análise Estrutural Desacoplada
Algumas considerações importantes devem ser feitas em relação às simplificações
inerentes à formulação desacoplada do ponto de vista da interação linha-casco. Para
sistemas offshore mais simples, situados em lâminas d’água rasas e com poucas linhas
conectadas à unidade flutuante, esta metodologia se mostra vantajosa devido ao baixo
custo computacional. Porém, em unidades flutuantes em que a interação não linear com
as linhas precisa ser considerada, como é o caso de estruturas mais leves como
monoboias, a metodologia desacoplada traz resultados imprecisos.

19
Além disso, foi observado por Ormberg e Larsen [19] que para um navio ancorado
em águas ultra profundas (2.000 m), o offset da unidade gerado pelas forças de deriva
média e os movimentos de baixa frequência representam 95% do offset total do casco,
sendo este constituído por 60% de offset médio e 35% de movimentos de baixa
frequência. Uma vez que as linhas são consideradas como coeficientes escalares, o
amortecimento das linhas nos movimentos de baixa frequência do casco não é
considerado.
Para lâminas d’água rasas, 70 m por exemplo, os movimentos associados às
frequências de onda, RAOs, considerados na formulação desacoplada representam 50%
do offset total da embarcação. Entretanto, com o aumento da lâmina d’água e da
quantidade de linhas conectadas à unidade, as simplificações da metodologia levam a um
comprometimento da qualidade dos resultados como observado em [20] e [21]. A
metodologia desacoplada não foi desenvolvida no presente trabalho, uma vez que o
estudo de caso se situa em lâmina d’água profunda e é composto por muitas linhas.
Os itens seguintes apresentam as metodologias mais robustas desenvolvidas no
programa Situa/Prosim 2, que comtempla tanto a formulação desacoplada, a fracamente
e a fortemente acoplada em seu código para análise de sistemas offshore.
3.4 Metodologia Fracamente Acoplada
No item anterior foi apresentado como os componentes de um sistema offshore
podem ser analisados de maneira desacoplada. Foi visto que é necessário que o casco e
as linhas sejam modelados separadamente, além de apresentadas algumas considerações
sobre a simplificação dos cálculos e os impactos disso na confiabilidade dos resultados.
A metodologia acoplada, esquematizada na Figura 3.5, tem por base o
processamento da análise em um único código de dados, o que fornece resultados mais
precisos. Tem-se a formulação fracamente acoplada e a fortemente acoplada, sendo que
neste item será introduzida a metodologia fracamente acoplada e no item seguinte
apresentada a metodologia fortemente acoplada.

20
Figura 3.5 - Análise Estrutural Acoplada [4]
Na análise fracamente acoplada existem duas etapas distintas de cálculo a cada
instante de tempo do processo de integração das equações de movimento do casco. Num
primeiro momento é feita a análise hidrodinâmica de movimentos da unidade flutuante e
em seguida a análise estrutural das linhas de ancoragem e dos risers em elementos finitos.
Na primeira etapa de cálculo, e só na primeira etapa, as linhas de ancoragem e os
risers são simplificados por coeficientes escalares que entram no lado direito da equação
do movimento da unidade flutuante, equação (3.1), juntamente com os carregamentos
ambientais de onda, vento e correnteza. Na segunda etapa é feito o cálculo estrutural das
linhas, modeladas em elementos finitos.
O Prosim, apresentado no item 1.4, tem um processo de cálculo iterativo para
considerar as forças advindas do movimento da unidade flutuante nas linhas que
compõem o sistema.
Primeiramente o Prosim realiza uma análise hidrodinâmica para obtenção dos
movimentos do casco da unidade flutuante. A análise hidrodinâmica do casco consegue
gerar uma estimativa das trações nas linhas de ancoragem, porém esta estimativa não
considera os efeitos não lineares dinâmicos aos quais as linhas estão sujeitas, uma vez
que as linhas são simplificadas por coeficientes escalares na equação do movimento do
casco. As trações estimadas das linhas são aplicadas diretamente no topo de cada linha
no modelo em elementos finitos, como movimento prescrito, e então o Prosim realiza a
análise estrutural de cada linha separadamente.
O processo completo a que os componentes do sistema offshore são submetidos
durante uma análise fracamente acoplada, a cada instante de tempo, é resumido na Figura
3.6.

21
Figura 3.6 - Etapas da Análise Estrutural Fracamente Acoplada
O modelo em elementos finitos das linhas considera todos os efeitos não lineares
hidrodinâmicos aos quais elas estão sujeitas. As forças de topo de cada linha, obtidas
nesta segunda etapa de cálculo da formulação fracamente acoplada, são aplicadas no lado
direito das equações de movimento do casco, equação (3.1). Portanto, nota-se que a
estratégia de acoplamento desta metodologia considera os movimentos da unidade
flutuante como prescritos no topo das linhas, e as forças de topo de cada linha são
aplicadas no lado direito da equação de movimento do casco.
A principal simplificação existente na formulação fracamente acoplada está na
consideração das linhas como escalares para resolução da equação de movimentos do
casco. Isto faz com que a interação dinâmica não linear existente entre o casco e as linhas
não seja considerada na análise. Mas é importante notar que esta metodologia une um
modelo hidrodinâmico de casco com os modelos em elementos finitos das linhas.
Não se deve confundir os efeitos hidrodinâmicos não lineares aos quais as linhas
estão sujeitas devido aos carregamentos ambientais, que são considerados na análise em
elementos finitos, com a interação não linear entre o casco e as linhas que de fato não é
considerada na estratégia de acoplamento desta formulação.
Outra característica importante da metodologia fracamente acoplada é que são
gerados modelos em elementos finitos para cada linha individualmente, desta maneira
tem-se uma matriz de rigidez correspondente a cada linha e estas matrizes têm banda
relativamente reduzida como observado em [2], quando comparadas à matriz de rigidez
obtida na formulação fortemente acoplada, como será visto adiante. Isto garante uma
eficiência computacional, principalmente quando se analisa modelos com grande número
de linhas.
O baixo custo computacional é uma grande vantagem da metodologia fracamente
acoplada e os resultados encontrados são confiáveis quando comparados a resultados de
ensaios em sistemas em que as forças de interação entre as linhas e o casco podem ser
desconsideradas [26].

22
3.5 Metodologia Fortemente Acoplada
A estratégia de acoplamento da metodologia fortemente acoplada tem como
resultado um sistema de equações diferenciais único, que combina as matrizes de
elementos finitos de massa, amortecimento e rigidez do sistema global offshore,
englobando o casco, as linhas de ancoragem e risers. Para que isto seja numericamente
possível, o casco é acoplado à malha de elementos finitos das linhas através de
acoplamento numérico [2].
Durante a implementação da formulação fortemente acoplada no Prosim, rotinas
foram criadas para a consideração do casco no modelo de elementos finitos das linhas.
Para considerar o modelo do casco rígido o Prosim cria elementos rígidos internamente
que representam a interação do casco com as linhas, esses elementos são chamados neste
trabalho de dummy members para aplicar uma definição utilizada na indústria, e
apresentam a propriedade de não interferir nos resultados do modelo, proporcionando
apenas a rigidez necessária ao modelo para estabelecer as conexões nas posições corretas.
Para representar corretamente o casco e suas propriedades hidrodinâmicas num modelo
de elementos finitos é necessário que nós/elementos adicionais sejam criados no modelo.
Nesta modelagem o casco será representado por um nó adicional que define o CG
da unidade flutuante, neste momento o nó isolado representa os seis graus de liberdade
do casco. Os elementos rígidos criados pelo Prosim durante as análises conectam o casco
com as linhas. Uma vez que o casco e as linhas são acoplados em uma equação de
movimento global, a interação entre o casco e as linhas é completamente considerada.
A integração da equação de movimento do casco e das linhas é realizada
simultaneamente, Figura 3.7.
Figura 3.7 - Análise Estrutural Fortemente Acoplada
A solução numérica é baseada num processo incremental de integração no
domínio do tempo por meio de algoritmos implícitos como o método Newmark [13]. O
equilíbrio não linear dinâmico é obtido mais rapidamente por meio do esquema iterativo
de Newton-Raphson entre forças internas e externas.

23
Nota-se então que os coeficientes escalares considerados nas formulações
desacopladas e fracamente acopladas não são mais necessários na metodologia
fortemente acoplada. Sabe-se que estes coeficientes são estimados e existe um erro
associado não só às simplificações inerentes à linearização, como também aos valores
atribuídos a estes coeficientes. Entretanto, a equação de movimento das linhas se
caracteriza da mesma forma como definida na equação (3.2), uma vez que a estratégia de
acoplamento é focada na consideração do casco no modelo de elementos finitos das
linhas.
A resolução do sistema global fortemente acoplado tem como desvantagem um
alto custo computacional. Pode-se concluir que quando as altas frequências de resposta
das linhas não influenciam nos movimentos do casco, não é vantajoso usar uma
modelagem fortemente acoplada, uma vez que a formulação fracamente acoplada fornece
resultados confiáveis e um custo computacional mais baixo.

24
4 ESTUDO DE CASO
4.1 Introdução
Para o desenvolvimento deste estudo foi escolhido o sistema de risers para águas
profundas conhecido como BSR - Bóia de Sustentação de Risers. O objetivo é modelar
simplificadamente o sistema, composto por: FPSO, jumpers, risers e a boia de
sustentação de forma fracamente acoplada e estudar o comportamento dinâmico do
sistema. Além disso, o capítulo 5 introduz considerações sobre a aplicação da
metodologia fortemente acoplada para o sistema em estudo.
Este capítulo apresenta a concepção e dimensionamento simplificado
desenvolvido para o estudo de caso. É importante ressaltar que uma vez que se trata de
um trabalho acadêmico, o sistema não será completamente dimensionado seguindo
normas e recomendações de projeto.
O dimensionamento simplificado do sistema BSR fracamente acoplado é o
principal objetivo deste estudo de caso. Portanto, não se faz necessário o estudo de uma
vasta gama de carregamentos ambientais. Todas as considerações tomadas nas
modelagens e análises desenvolvidas neste estudo simplificado do conceito BSR são
apresentadas a seguir.
No capítulo 3.5 é explicado como o Situa/Prosim realiza uma análise fortemente
acoplada. Na implementação desenvolvida por BAHIENSE [2] no Situa/Prosim, o
projetista precisa criar a malha de elementos finitos que definirá o contorno da unidade
flutuante. O Prosim cria os chamados dummy members, elementos finitos responsáveis
pela conexão e acoplamento dos componentes do sistema.
Caso o usuário defina a malha de elementos finitos da unidade flutuante e os
dummy members, o Situa/Prosim 2 é capaz de encarar o sistema como totalmente
acoplado e analisá-lo na forma fortemente acoplada.
O desenvolvimento deste estudo foi divido em duas fases, sendo a fase 1 a análise
fracamente acoplada do sistema offshore, apresentada neste capítulo e a fase 2 a
concepção da malha de elementos finitos fortemente acoplada do sistema BSR para
viabilizar um estudo de caso aplicando a metodologia fortemente acoplada, apresentada
no capítulo 5 . Nota-se que neste trabalho a metodologia fortemente acoplada não será
completamente desenvolvida, porém, levando-se em consideração as características
inerentes ao desenvolvimento, apresenta-se uma proposta de malha de elementos finitos
aplicável para a metodologia fortemente acoplada que viabilizaria a solução do sistema,
além de uma série de considerações sobre a modelagem desta malha. A fase 2 poderá ser
continuada em trabalhos futuros, com o estudo aprofundado da malha de elementos
finitos e posterior análise do comportamento dinâmico do sistema fortemente acoplado.

25
4.2 O conceito BSR - Boia de Sustentação de Risers
A boia de sustentação de risers constitui-se em um elemento estrutural submerso
ancorado que foi idealizada para que seja possível utilizar risers rígidos e flexíveis
trabalhando em conjunto para exploração de petróleo e gás em águas profundas. Uma vez
que não é possível fazer uma conexão direta entre risers rígidos e risers flexíveis, surgiu
o conceito da boia de sustentação de risers.
A boia de sustentação de risers representa uma inovação da engenharia em
sistemas offshore, possibilitando uma otimização dos usos dos dois tipos de risers. Este
conceito foi aplicado no pré-sal brasileiro, especificamente nos campos de Sapinhoá e
Lula Norte [22]. O sistema de risers BSR já se encontra instalado e operando na Bacia de
Santos desde 2015.
Figura 4.1 - Sistema BSR - Boia de Sustentação de Risers [23]
A Figura 4.1 apresenta os componentes da parte subsea de um sistema BSR típico.
Alguns destes componentes, como o FPSO e sua ancoragem fazem parte do sistema
completo de exploração e foram apresentados no capítulo 2 . O sistema BSR é composto
por:
• Jumpers;
• Risers;
• Boia de Sustentação de Risers - BSR;
• Ancoragem da Boia.

26
No sistema BSR todos os componentes adicionais precisam ser dimensionados
para a sustentação das linhas que fazem parte desse sistema. Um sistema convencional de
exploração de petróleo e gás é composto por risers, equipamentos e elementos de
terminações, além dos acessórios dos risers como: enrijecedores, restritores de curvatura,
MCVs (linhas flexíveis e umbilicais); estes componentes também fazem parte do sistema
BSR. No entanto os jumpers - linhas flexíveis conectando o FPSO e a boia de sustentação
- e a ancoragem da boia são componentes adicionais necessários para que o uso do
conjunto seja viável.
Os risers, apresentados no item 2.3, têm características diferentes de fabricação e
instalação, isso faz com que cada tipo (flexível e rígido) tenha também características
mecânicas diferentes. O sistema BSR é concebido tendo como principal diferenciação a
utilização dos risers rígidos e flexíveis de forma otimizada, com um melhor
aproveitamento das características mecânicas de ambos os tipos de dutos de exploração,
projetados para condições em que cada um deles é mais aplicável. Além disso, os risers
se diferenciam em sua função, podendo ser: produção, injeção e controle (umbilicais),
como será melhor descrito no item 4.3.3.
Conforme apontado no item 2.3, os risers flexíveis têm uma menor restrição à
curvatura que os risers rígidos, resistindo melhor aos carregamentos hidrodinâmicos mais
severos encontrados próximo à superfície marinha. Já os risers rígidos têm maiores
resistências ao colapso, axial, à torção e à flexão do que os flexíveis, e isso garante um
melhor desempenho dos risers rígidos aos carregamentos hidrostáticos, maiores junto ao
leito marinho. Portanto, a melhor aplicabilidade de cada tipo de riser em condições de
carregamento em que são mais eficientes estruturalmente foi a motivação para o estudo e
desenvolvimento do sistema BSR.
A Figura 4.1 apresenta um esquema possível de arranjo submarino do sistema
BSR, podendo ser observado que têm-se os jumpers flexíveis e umbilicais entre o FPSO
e a boia de sustentação de risers; da boia até o leito marinho são encontrados risers rígidos
e umbilicais. Desta forma, os flexíveis absorvem a maior parte dos carregamentos
hidrodinâmicos e os rígidos, que se encontram abaixo da zona de influência das ondas,
estão sujeitos às correntes e demais carregamentos hidrostáticos.
Além do melhor aproveitamento dos dois tipos de risers disponíveis na indústria,
há de se apontar uma vantagem econômica da solução estrutural do sistema BSR.
Conforme apresentado no item 2.3, os risers flexíveis têm um custo de aquisição maior
que os rígidos, em razão do seu processo de fabricação. A Figura 4.1 mostra que o
comprimento dos flexíveis é consideravelmente menor que o dos rígidos e isto representa
uma grande economia no custo de compra dos risers. Porém, o custo da BSR é bastante
elevado, seria necessário o conhecimento de todos os custos para afirmar que a solução
completa é mais barata que soluções convencionais.
Entretanto sabe-se que o processo de instalação dos risers rígidos é mais complexo
e oneroso do que os flexíveis. Os risers rígidos dos sistemas BSRs do pré-sal brasileiro
tiveram uma série de desafios ligados à instalação, como apontado em [24]. Portanto, ao
avaliar a vantagem econômica da implantação do sistema BSR estarão envolvidas muitas

27
variáveis como o custo do desenvolvimento do projeto inovador, custo de fabricação e
instalação dos componentes, além do desempenho estrutural do sistema ao longo da vida
útil para a qual foi projetado.
Do ponto de vista do projeto estrutural do sistema BSR, a idealização, o estudo e
o projeto da boia de sustentação de risers e sua ancoragem representam o maior desafio
imposto pelo projeto inovador como observado em [22], que por sua vez também exigiu
um amplo estudo do processo de instalação da boia submersa.
As referências bibliográficas [22], [23], [24] e [25] apresentam uma série de
considerações sobre o projeto e instalação do sistema BSR desenvolvido para os Campos
de Sapinhoá e Lula Norte do pré-sal brasileiro. A primeira boia para sustentação de risers
foi instalada em uma região de lâmina d’água de 2.100 m e posicionada a uma
profundidade de 250 m, conforme descrito em [25].
A avaliação dos fluidos encontrados nos poços da Bacia de Santos indicou níveis
significativamente altos de CO2 e H2S, um agravante que dificulta a utilização de risers
flexíveis para exploração. Estas considerações representam sérios desafios para as linhas
flexíveis resistirem à vida útil de projeto, prevista para durar aproximadamente 30 anos,
conforme [22]. Esta limitação aos flexíveis, juntamente com a dificuldade imposta pela
lâmina d’água ultra-profunda, pode tornar inviável economicamente e estruturalmente o
uso de risers flexíveis para exploração do pré-sal brasileiro.
A escolha desta solução estrutural traz outros benefícios para o sistema offshore
completo ao qual o sistema BSR está inserido. Ao desacoplar os risers do FPSO, estes
ficam menos sujeitos aos carregamentos dinâmicos transferidos pelo FPSO, o que confere
uma maior resistência à fadiga aos risers rígidos, como apresentado em [22]. A presença
da boia submersa também alivia as cargas atuantes no FPSO, o qual tem um balcony com
dezenas de linhas conectadas.
A boia de sustentação de risers do sistema BSR funciona como uma TLP
submersa, vide item 2.1.1. A boia atua como uma TLP submersa intermediária entre os
flexíveis e rígidos, como apontado em [22].
Uma vez que a boia se encontra abaixo da zona de atuação das ondas, o
carregamento de onda atuante no FPSO é transferido à boia pelos jumpers flexíveis, como
apontado em [22]. Tem-se então os seguintes carregamentos predominantes atuando na
boia submersa:
• Peso próprio da boia;
• Peso dos jumpers;
• Peso dos SCRs;
• Correntes marítimas;
• Peso dos tendões;
• Empuxo da boia.
Em [22] é evidenciado que o empuxo da boia suporta seu peso próprio, dos
jumpers, dos SCRs e dos tendões. A resultante entre o empuxo e os pesos proporciona

28
estabilidade para todo o sistema BSR. A estabilidade da boia é importante para resistir às
solicitações de deslocamentos horizontais, sendo estes impostos pelas correntes
marítimas atuantes nos tendões e pelo movimento da embarcação através da transferência
pelos jumpers. O sistema de lastro e a ancoragem tracionada garantem esta estabilidade
estrutural da boia para vários movimentos laterais, conforme [22].
O presente estudo de caso não objetiva reproduzir a boia instalada no pré-sal
brasileiro, sendo todos os componentes do sistema analisado desenvolvidos neste
trabalho. É importante notar que o projeto completo do sistema BSR envolve uma série
de análises globais, locais, estudos analíticos complexos e inúmeras outras considerações
de projeto que não fazem parte do escopo deste trabalho, como apontado em [22], [23],
[24] e [25]. No item 4.3 é evidenciado que o trabalho acadêmico foi desenvolvido para
condições ambientais e sob premissas diferentes das adotadas no pré-sal brasileiro.
4.3 Estudo de Caso – Características do Sistema
Neste item são apresentadas as principais considerações tomadas nas modelagens
do sistema BSR desenvolvido no software Situa/Prosim 2 [1]. Inicialmente a concepção
adotada para o sistema BSR idealizado neste estudo de caso é apresentada. Em seguida
são elucidadas as considerações de modelagem pertinentes a cada uma das metodologias
de análise, i.e. fracamente acoplada e fortemente acoplada.
A concepção desenvolvida do sistema BSR, representada na Figura 4.2, consiste
na definição de todos os parâmetros de modelagem necessários para a simulação do
sistema, tais como:
• Lâmina d’água;
• Unidade Flutuante;
• Localização inicial da boia de sustentação de risers;
• Sistema de risers (incluindo os jumpers).
O objetivo da concepção do sistema BSR é dimensionar simplificadamente uma boia
de sustentação de risers e seus tendões, para suportar o sistema de risers pré-definidos
para o projeto. Utiliza-se na modelagem fatores de segurança para que o sistema possa
resistir aos carregamentos ambientais que serão posteriormente aplicados no estudo do
seu comportamento dinâmico. Foi observado no item 4.2 que o sistema BSR é um sistema
de risers para lâminas d’água profundas; a lâmina d’água escolhida para este projeto
simplificado foi de 1.800 m. O sistema desenvolvido não se situa em uma região
específica, todas as considerações são fictícias, porém coerentes com as práticas de
projeto de sistemas offshore.

29
Figura 4.2 - Concepção do Sistema BSR no SITUA/Prosim 2
4.3.1 FPSO
O FPSO escolhido está ilustrado na Figura 4.3 e tem as dimensões apresentadas
na Tabela 4.1. No intuito de facilitar a modelagem optou-se por não modelar uma
ancoragem para o FPSO e sim utilizar um RAO de movimento para representar o
comportamento do navio. Esta consideração é pertinente para o estudo de caso, já que o
foco é o comportamento dinâmico da boia de sustentação de risers. Portanto, a análise do
movimento do navio é realizada por movimento prescrito, diferente do restante do sistema
offshore em que se aplica a metodologia de análise fracamente acoplada.
LDA = 1.800 m
Jumpers flexíveis
Risers rígidos
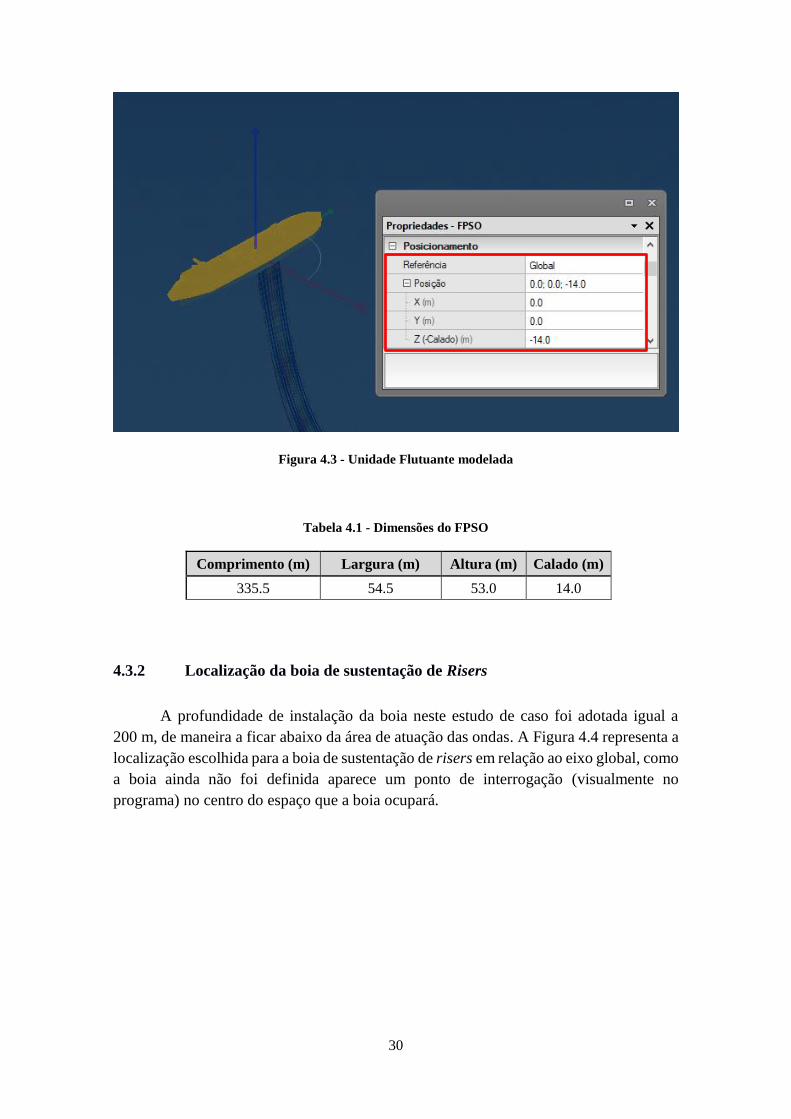
30
Figura 4.3 - Unidade Flutuante modelada
Tabela 4.1 - Dimensões do FPSO
Comprimento (m) Largura (m) Altura (m) Calado (m)
335.5 54.5 53.0 14.0
4.3.2 Localização da boia de sustentação de Risers
A profundidade de instalação da boia neste estudo de caso foi adotada igual a
200 m, de maneira a ficar abaixo da área de atuação das ondas. A Figura 4.4 representa a
localização escolhida para a boia de sustentação de risers em relação ao eixo global, como
a boia ainda não foi definida aparece um ponto de interrogação (visualmente no
programa) no centro do espaço que a boia ocupará.
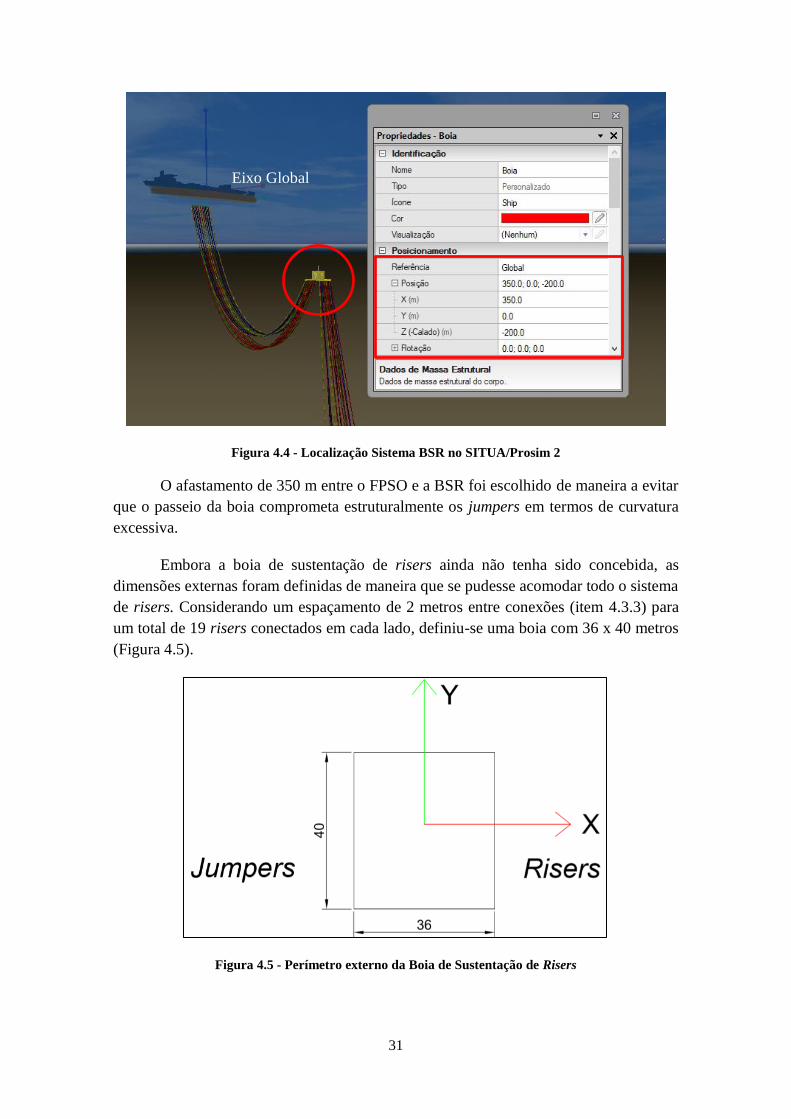
31
Figura 4.4 - Localização Sistema BSR no SITUA/Prosim 2
O afastamento de 350 m entre o FPSO e a BSR foi escolhido de maneira a evitar
que o passeio da boia comprometa estruturalmente os jumpers em termos de curvatura
excessiva.
Embora a boia de sustentação de risers ainda não tenha sido concebida, as
dimensões externas foram definidas de maneira que se pudesse acomodar todo o sistema
de risers. Considerando um espaçamento de 2 metros entre conexões (item 4.3.3) para
um total de 19 risers conectados em cada lado, definiu-se uma boia com 36 x 40 metros
(Figura 4.5).
Figura 4.5 - Perímetro externo da Boia de Sustentação de Risers
Eixo Global

32
4.3.3 Sistema de Risers e Jumpers
O sistema de risers fictício proposto é composto por 19 linhas, sendo que para o
sistema BSR foram considerados 19 jumpers flexíveis e 19 risers rígidos. O sistema de
risers é simétrico - em relação às funções dos risers - e as linhas que compõem o
sistema BSR deste estudo de caso estão listadas na Tabela 4.2. A simetria pode ser
observada na Figura 4.6 que representa a vista frontal das conexões dos jumpers no FPSO.
Tabela 4.2 - Linhas do Sistema BSR
Linha Jumper Linha Riser
J01 Umb R01 Umb
J02 PO R02 PO
J03 GL R03 GL
J04 IG R04 IG
J05 SERV R05 SERV
J06 PO - 2 R06 PO - 2
J07 IA R07 IA
J08 PO - 3 R08 PO - 3
J09 Umb - 2 R09 Umb - 2
J10 PO - 4 R10 PO - 4
J11 Umb - 3 R11 Umb - 3
J12 PO - 5 R12 PO - 5
J13 IA - 2 R13 IA - 2
J14 PO - 6 R14 PO - 6
J15 SERV - 2 R15 SERV - 2
J16 IG - 2 R16 IG - 2
J17 GL - 2 R17 GL - 2
J18 PO - 8 R18 PO - 8
J19 Umb - 4 R19 Umb - 4
Legenda:
Umb - Umbilical;
PO - Produção;
GL - Gás Líft;
IG - Injeção de Gás;
SERV – Serviço;
IA – Injeção de água.
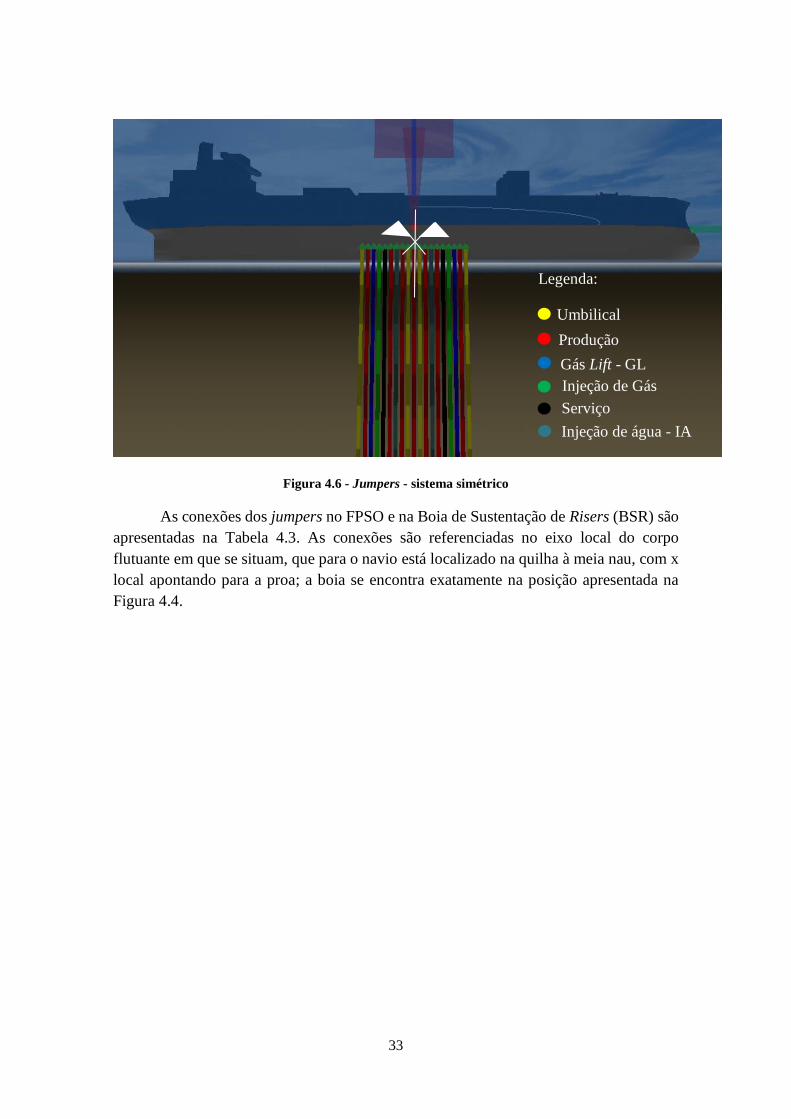
33
Figura 4.6 - Jumpers - sistema simétrico
As conexões dos jumpers no FPSO e na Boia de Sustentação de Risers (BSR) são
apresentadas na Tabela 4.3. As conexões são referenciadas no eixo local do corpo
flutuante em que se situam, que para o navio está localizado na quilha à meia nau, com x
local apontando para a proa; a boia se encontra exatamente na posição apresentada na
Figura 4.4.
Legenda:
Umbilical
Produção
Gás Lift - GL
Injeção de Gás
Injeção de água - IA
Serviço

34
Tabela 4.3 - Conexões dos Jumpers
Linha Jumper Conexões FPSO Conexões BSR
x (m) y (m) z (m) x (m) y (m) z (m)
1 J01 - Umb 0.0 -27.0 5.0 -18.0 0.0 0.0
2 J02 - PO 3.0 -27.0 5.0 -18.0 2.0 0.0
3 J03- GL 6.0 -27.0 5.0 -18.0 4.0 0.0
4 J04 - IG 9.0 -27.0 5.0 -18.0 6.0 0.0
5 J05 - SERV 12.0 -27.0 5.0 -18.0 8.0 0.0
6 J06 - PO - 2 15.0 -27.0 5.0 -18.0 10.0 0.0
7 J07 - IA 18.0 -27.0 5.0 -18.0 12.0 0.0
8 J08 - PO - 3 21.0 -27.0 5.0 -18.0 14.0 0.0
9 J09 - Umb - 2 24.0 -27.0 5.0 -18.0 16.0 0.0
10 J10 - PO - 4 27.0 -27.0 5.0 -18.0 18.0 0.0
11 J11 - Umb - 3 -3.0 -27.0 5.0 -18.0 -2.0 0.0
12 J12 - PO - 5 -6.0 -27.0 5.0 -18.0 -4.0 0.0
13 J13 - IA - 2 -9.0 -27.0 5.0 -18.0 -6.0 0.0
14 J14 - PO - 6 -12.0 -27.0 5.0 -18.0 -8.0 0.0
15 J15 - SERV - 2 -15.0 -27.0 5.0 -18.0 -10.0 0.0
16 J16 - IG - 2 -18.0 -27.0 5.0 -18.0 -12.0 0.0
17 J17 - GL - 2 -21.0 -27.0 5.0 -18.0 -14.0 0.0
18 J18 - PO - 8 -24.0 -27.0 5.0 -18.0 -16.0 0.0
19 J19 - Umb - 4 -27.0 -27.0 5.0 -18.0 -18.0 0.0
Tabela 4.4 - Conexões dos Risers
Linha Riser Conexões BSR
x (m) y (m) z (m)
20 R01 - Umb 18.0 0.0 0.0
21 R02 - PO 18.0 2.0 0.0
22 R03- GL 18.0 4.0 0.0
23 R04 - IG 18.0 6.0 0.0
24 R05 - SERV 18.0 8.0 0.0
25 R06 - PO - 2 18.0 10.0 0.0
26 R07 - IA 18.0 12.0 0.0
27 R08 - PO - 3 18.0 14.0 0.0
28 R09 - Umb - 2 18.0 16.0 0.0
29 R10 - PO - 4 18.0 18.0 0.0
30 R11 - Umb - 3 18.0 -2.0 0.0
31 R12 - PO - 5 18.0 -4.0 0.0
32 R13 - IA - 2 18.0 -6.0 0.0
33 R14 - PO - 6 18.0 -8.0 0.0
34 R15 - SERV - 2 18.0 -10.0 0.0
35 R16 - IG - 2 18.0 -12.0 0.0
36 R17 - GL - 2 18.0 -14.0 0.0
37 R18 - PO - 8 18.0 -16.0 0.0
38 R19 - Umb - 4 18.0 -18.0 0.0

35
As conexões dos risers rígidos na boia se encontram na Tabela 4.4. As conexões
foram definidas em Z igual a zero para simplificar o modelo e para que estas se encontrem
na altura do eixo dos cilindros que irão compor a boia, tanto para os jumpers quanto para
os risers, conforme apresentado na Tabela 4.3 e na Tabela 4.4.
O sistema BSR é composto por seis tipos de risers diferentes no que diz respeito
à função desempenhada, conforme evidenciado na Figura 4.4. As propriedades adotadas
para cada um dos tipos de jumpers e risers são propriedades típicas de projeto. Sendo que
os jumpers de produção, injeção de água, injeção de gás e gás lift têm 6 polegadas
(diâmetro interno); e os jumpers de serviço têm 4 polegadas de diâmetro interno. Todos
os SCRs têm 8,75 polegadas (neste caso referencia-se ao diâmetro externo). Importante
ressaltar que os umbilicais de controle se encontram do lado dos jumpers e dos risers,
apesar de não serem rígidos. A vazão dos fluidos é mantida quando passam pelos jumpers
e risers.
Para os jumpers foram escolhidos comprimentos alternados para os flexíveis,
como pode ser observado pela diferença de curvatura na Figura 4.4, os comprimentos se
alternam em 600 m e 650 m, portanto a linha 1 – J01 Umb tem 600 m, a linha 2 – J02 PO
tem 650 m, a linha 3 – J03 GL 600 m e assim sucessivamente. A alternância foi adotada
para evitar interferência entre as linhas, e os valores de comprimentos são razoáveis tendo
em vista a distância entre o FPSO e a boia. Buscou-se trabalhar com curvaturas que sejam
suficientes para não gerar problemas de raios mínimos nas linhas, embora não se atribuam
limites de raios mínimos de curvatura aos jumpers flexíveis e no umbilical nesse trabalho.
Tendo todos estes parâmetros definidos, os jumpers são lançados como catenárias no
Situa/Prosim 2.
O comprimento de cada um dos risers rígidos é 2.200 m, até onde o modelo foi
truncado, e há uma diferença de 3° de azimute entre dois risers rígidos vizinhos. Sendo o
azimute o ângulo que o riser faz com o norte geográfico. O ângulo de topo é o ângulo que
o topo do riser faz com o eixo vertical, sendo estes diferentes para cada tipo de riser e
apresentados na Tabela 4.5. Os fluidos internos foram considerados em cada linha na
modelagem.
Tabela 4.5 - Ângulo de Topo dos Risers
Riser Ângulo de topo (°)
Produção 9
Gás Lift 8
Injeção de Gás 7
Injeção de Água 8
Serviço 5
Umbilical 5
Tendo definido o sistema de risers e jumpers, faz-se possível dimensionar
simplificadamente uma boia de sustentação de risers e sua ancoragem para suportar os
pesos das linhas conectadas. O dimensionamento simplificado é apresentado a seguir.
36
4.4 Dimensionamento Simplificado da Boia de Sustentação de Risers
O dimensionamento é baseado em equilíbrio de forças e de momentos e
inicialmente são consideradas apenas as cargas estáticas para definição da boia de
sustentação de risers e dos tendões. Neste item serão detalhadas as fases do
dimensionamento simplificado, explicitando como os componentes do sistema BSR, boia
de sustentação de risers e tendões, são definidos através do equilíbrio de forças e
momentos do sistema, além das considerações tomadas para que o sistema dimensionado
resista também às cargas dinâmicas.
A boia é modelada como um conjunto de cilindros, como será detalhado adiante,
e por isso a hidrodinâmica da boia é regida pela Teoria de Morison [11].
4.4.1 Equilíbrio de Forças Horizontais - Definição dos Tendões
Como apresentado no item 4.3.3, tem-se um comprimento substancialmente maior
de risers rígidos do que de jumpers flexíveis, e naturalmente o maior peso do conjunto de
risers gera um desequilíbrio horizontal na direção dos mesmos, em razão dos ângulos de
topo das linhas com a vertical. Este desequilíbrio horizontal é compensado pelos tendões
que serão definidos neste item, uma vez que os tendões são inclinados, o ângulo de topo
que fazem com a vertical gera uma componente de força horizontal no topo de cada um
dos tendões. Sendo estas componentes horizontais no topo dos tendões as forças
responsáveis pelo equilíbrio horizontal do sistema.
O desequilíbrio horizontal estático resultante na direção dos risers é a força total
horizontal à qual o conjunto de tendões precisa equilibrar. Ao realizar uma análise estática
do sistema apresentado no item 4.3.3, calcula-se o somatório de forças horizontais globais
das linhas (jumpers e risers) para se obter o desequilíbrio horizontal estático ao qual o
conjunto de tendões precisa resistir.
A Figura 4.7 é um diagrama de forças horizontais do sistema BSR estático sem
considerar os tendões, as dimensões da boia ainda não foram calculadas nesta etapa,
portanto os cilindros da figura são meramente ilustrativos, porém já se pode notar que é
esperado um diâmetro maior para o cilindro que sustenta os risers do que para o cilindro
que sustenta os jumpers. Ao longo deste dimensionamento simplificado fica claro que as
forças exercidas pelos risers na boia são maiores que as exercidas pelos jumpers, por
causa do maior comprimento dos risers.

37
Figura 4.7 - Diagrama de Forças Horizontais (sem considerar a boia) - vista lateral
Fazendo o equilíbrio de forças horizontais, apresentado na equação (4.1), e
definindo-se o ângulo de topo dos tendões, calcula-se a força horizontal necessária ao
conjunto de tendões para equilibrar o sistema estático, sendo esta força o desequilíbrio
horizontal total apresentado na Tabela 4.6.
∑𝐹𝑥𝑗 + ∑𝐹𝑥𝑟 + ∑𝐹𝑥𝑡 = 0 (4.1)
Sendo:
∑Fx.j - Somatório de Foças Horizontais nos jumpers;
∑Fx.r - Somatório de Foças Horizontais nos risers;
∑Fx.t - Somatório de Foças Horizontais nos tendões;
∑Fx.jumpers = Somatório de
Forças horizontais nos jumpers
∑Fx.risers = Somatório de
Forças horizontais nos risers
Legenda:

38
Tabela 4.6 - Forças Horizontais nas linhas
Ju
mp
ers
Linha
Força
Horizontal
Global (kN)
Ris
ers
Linha
Força
Horizontal
Global (kN)
J01 - Umb 14.6 R01 - Umb -27.2
J02 - PO 60.4 R02 - PO -184.1
J03- GL 125.3 R03- GL -234.0
J04 - IG 116.5 R04 - IG -204.6
J05 - SERV 30.9 R05 - SERV -130.9
J06 - PO - 2 60.4 R06 - PO - 2 -197.1
J07 - IA 57.1 R07 - IA -207.9
J08 - PO - 3 60.4 R08 - PO - 3 -200.4
J09 - Umb - 2 14.6 R09 - Umb - 2 -30.5
J10 - PO - 4 60.4 R10 - PO - 4 -201.5
J11 - Umb - 3 14.6 R11 - Umb - 3 -30.5
J12 - PO - 5 60.4 R12 - PO - 5 -200.4
J13 - IA - 2 57.1 R13 - IA - 2 -207.9
J14 - PO - 6 60.4 R14 - PO - 6 -197.1
J15 - SERV - 2 30.9 R15 - SERV - 2 -130.9
J16 - IG - 2 116.5 R16 - IG - 2 -204.6
J17 - GL - 2 125.3 R17 - GL - 2 -234.0
J18 - PO - 8 60.4 R18 - PO - 8 -184.1
J19 - Umb - 4 14.6 R19 - Umb - 4 -27.2
∑Fx.j 1140.6 R01 - Umb -3034.6
∑FH = Desequilíbrio Horizontal = 1894 kN
As forças horizontais encontradas na análise estática para cada linha (jumpers e
risers) são apresentadas na Tabela 4.6, por ação e reação, estas forças agem na boia com
sinal oposto aos encontrados na Tabela 4.6, por isso o desequilíbrio horizontal tem sinal
positivo. Os parâmetros de cálculo das forças nos tendões se encontram na Tabela 4.7.
Nota-se que após definida a quantidade de tendões (quatro), calcula-se as forças
apresentadas na Tabela 4.7, que são as forças de topo necessárias em cada tendão para
equilibrar o sistema estático composto por jumpers, risers e tendões.

39
Tabela 4.7 - Definição das Forças nos Tendões - Equilíbrio de forças horizontais
Equilíbrio de Forças
Horizontais Valor Unidade
Resultante de forças dos jumpers -1141 kN
Resultante de forças dos risers 3035 kN
Desequilíbrio horizontal 1894 kN
Número de tendões 4 -
Ângulo de topo dos tendões 5 graus
Força horizontal em cada tendão 474 kN
Força total em cada tendão 5433 kN
Força vertical em cada tendão 5412 kN
Uma vez obtida a força horizontal por tendão necessária para equilibrar o sistema,
basta lançar as linhas no modelo do Situa/Prosim 2, utilizando um comprimento de linha
que gere a força horizontal de topo que se deseja por tendão.
Os tendões são compostos de trechos de amarra de topo e de fundo, e cabo de aço.
Foram escolhidos materiais que tivessem um MBL (Maximum Break Load) no mínimo
1,5 superior à força total em cada tendão, para garantir que os tendões resistam às cargas
estáticas e dinâmicas.
Após a inclusão dos tendões no modelo numérico, como apresentado na Figura
4.8 e na Figura 4.9, todas as solicitações estáticas das linhas conectadas à boia podem ser
obtidas e desta forma a boia pode ser dimensionada simplificadamente para resistir às
forças dos jumpers, dos risers e dos tendões, utilizando-se do conceito de empuxo líquido
que é apresentado no item 4.4.2. Para o dimensionamento da boia faz-se o equilíbrio de
forças verticais e de momentos, conforme descrito nos próximos itens.
Figura 4.8 - Linhas do Sistema BRS - Situa/Prosim 2

40
Figura 4.9 - Linhas do Sistema BRS - Situa/Prosim 2
4.4.2 Equilíbrio de Forças Verticais
A boia de sustentação de risers foi modelada por 4 cilindros, um cilindro onde se
apoiam os jumpers flexíveis, um cilindro onde se apoiam os SCRs e dois cilindros que os
conectam nas extremidades. A Figura 4.10 apresenta o diagrama de forças exercidas pelas
linhas na boia a ser concebida, já considerando os tendões definidos no item 4.4.1. Neste
estágio se definem as dimensões dos cilindros que compõem a boia de sustentação de
risers, através do equilíbrio de forças verticais.

41
Legenda:
Fx.t - Foça Horizontal por tendão;
Fz.t - Foça Vertical por tendão;
∑Fz.r - Somatório de Foças Verticais nos risers;
∑Fz.r - Somatório de Foças Verticais nos risers;
Figura 4.10 - Diagrama de Forças (sem considerar a boia) - vista lateral
Após a definição da boia teremos mais duas forças atuantes no sistema: o peso e
o empuxo da boia.
O empuxo e a força vertical dos tendões, que estão constantemente tracionados,
são os responsáveis pelo equilíbrio vertical do sistema. Uma vez que os tendões se
encontram tracionados, estes exercem uma força vertical orientada para baixo na boia de
sustentação de risers, assim como as forças que os jumpers e os risers exercem na boia,
verticais para baixo. Portanto, o empuxo da boia de sustentação de risers, em condições
estáticas, precisa resistir ao peso próprio da boia e às componentes verticais de força que
os tendões, os jumpers e os risers exercem na boia.
No dimensionamento simplificado deste trabalho acadêmico será usada uma
relação entre o empuxo e o peso da boia de sustentação de risers, para estimativa do peso
próprio da boia, sem considerar suas propriedades físicas. Esta estimativa considera que
42
o empuxo da boia, chamado aqui de empuxo final, é três vezes maior que o peso da boia,
conforme equação (4.2):
𝐸𝐹
𝑃= 3 (4.2)
Sendo:
EF - Empuxo final da boia;
P - Peso próprio da boia.
Esta estimativa se mostra conservadora, uma vez que o peso próprio da boia é a
maior força vertical do sistema BSR que precisa ser resistida pelo empuxo.
O uso desta relação para estimativa do peso da boia se explica pelo fato de que o
cálculo do peso real da boia não é aplicável a este estudo. Além das complexidades
envolvidas no projeto de uma boia de sustentação de risers apontadas na seção 4 , faz-se
importante notar que a boia instalada é composta por chapas de aço diferentes, com
diferentes espessuras para compor toda a boia. Isto envolve o sistema de lastro, de
pressurização, as conexões na boia, portanto é notório que a boia é bastante heterogênea.
Tornando necessário um conhecimento detalhado da composição de toda a boia para o
cálculo do peso real da boia de sustentação de risers, o que não faz parte do
desenvolvimento deste trabalho.
Até então temos apenas as linhas modeladas no Situa/Prosim 2 e a relação
apresentada entre o empuxo e o peso da boia, porém não possuímos o empuxo da boia,
que aqui chamaremos de empuxo final. Portanto é necessário introduzir o conceito de
empuxo líquido, que relaciona o empuxo final e o peso da boia, sendo este apenas um
conceito matemático, não correspondendo assim a uma propriedade real da boia.
O empuxo líquido é o empuxo necessário para equilibrar as forças verticais
atuantes na boia advindas das linhas conectadas a ela, desconsiderando o peso próprio da
boia. O empuxo líquido pode ser entendido como a parcela de empuxo da boia
responsável por sustentar todas as cargas estáticas, exceto o peso próprio da boia. O
empuxo da boia de sustentação de risers que será calculado neste item precisa resistir a
todas as cargas estáticas e chamaremos este de empuxo final. Dito isto, o empuxo líquido
pode ser definido na equação (4.3).
𝐸𝑙 = 𝐸𝐹 − 𝑃 (4.3)
Sendo:
El - Empuxo líquido da boia.
Por outro lado, ao se desconsiderar o peso da boia podemos calcular o empuxo
líquido pelo equilíbrio de forças verticais obtidas na análise estática no Situa/Prosim 2,
conforme a equação (4.4).
∑𝐹𝑧𝑗 + ∑𝐹𝑧𝑟 + ∑𝐹𝑧𝑡 + 𝐸𝑙 = 0 (4.4)
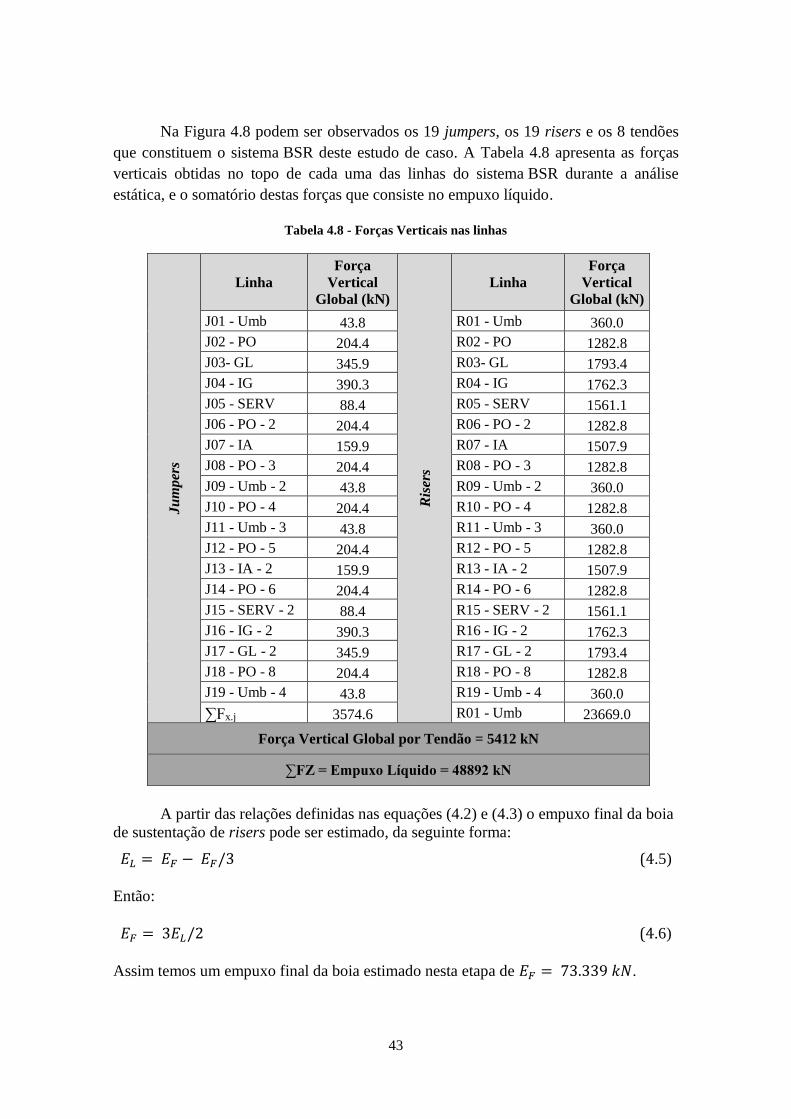
43
Na Figura 4.8 podem ser observados os 19 jumpers, os 19 risers e os 8 tendões
que constituem o sistema BSR deste estudo de caso. A Tabela 4.8 apresenta as forças
verticais obtidas no topo de cada uma das linhas do sistema BSR durante a análise
estática, e o somatório destas forças que consiste no empuxo líquido.
Tabela 4.8 - Forças Verticais nas linhas
Ju
mper
s
Linha
Força
Vertical
Global (kN)
Ris
ers
Linha
Força
Vertical
Global (kN)
J01 - Umb 43.8 R01 - Umb 360.0
J02 - PO 204.4 R02 - PO 1282.8
J03- GL 345.9 R03- GL 1793.4
J04 - IG 390.3 R04 - IG 1762.3
J05 - SERV 88.4 R05 - SERV 1561.1
J06 - PO - 2 204.4 R06 - PO - 2 1282.8
J07 - IA 159.9 R07 - IA 1507.9
J08 - PO - 3 204.4 R08 - PO - 3 1282.8
J09 - Umb - 2 43.8 R09 - Umb - 2 360.0
J10 - PO - 4 204.4 R10 - PO - 4 1282.8
J11 - Umb - 3 43.8 R11 - Umb - 3 360.0
J12 - PO - 5 204.4 R12 - PO - 5 1282.8
J13 - IA - 2 159.9 R13 - IA - 2 1507.9
J14 - PO - 6 204.4 R14 - PO - 6 1282.8
J15 - SERV - 2 88.4 R15 - SERV - 2 1561.1
J16 - IG - 2 390.3 R16 - IG - 2 1762.3
J17 - GL - 2 345.9 R17 - GL - 2 1793.4
J18 - PO - 8 204.4 R18 - PO - 8 1282.8
J19 - Umb - 4 43.8 R19 - Umb - 4 360.0
∑Fx.j 3574.6 R01 - Umb 23669.0
Força Vertical Global por Tendão = 5412 kN
∑FZ = Empuxo Líquido = 48892 kN
A partir das relações definidas nas equações (4.2) e (4.3) o empuxo final da boia
de sustentação de risers pode ser estimado, da seguinte forma:
𝐸𝐿 = 𝐸𝐹 − 𝐸𝐹/3 (4.5)
Então:
𝐸𝐹 = 3𝐸𝐿/2 (4.6)
Assim temos um empuxo final da boia estimado nesta etapa de 𝐸𝐹 = 73.339 𝑘𝑁.

44
A Tabela 4.9 apresenta os parâmetros de cálculo do peso e do empuxo final da
boia, conforme definido neste item.
Tabela 4.9 - Dimensionamento simplificado da boia - equilíbrio de forças verticais
Equilíbrio de Forças Verticais Valor Unidade
Resultante de forças dos jumpers -3575 kN
Resultante de forças dos risers -23669 kN
Resultante de forças dos tendões -21649 kN
Desequilíbrio vertical -48893 kN
Empuxo líquido necessário 48893 kN
Razão empuxo/peso 3 -
Peso da boia 24446 kN
Empuxo total 73339 kN
4.4.3 Equilíbrio de Momentos
Com isto é possível calcular os diâmetros dos cilindros que compõem a boia, a
partir da fórmula do empuxo para cilindros. A boia é modelada como 4 cilindros, um para
cada lado das linhas (jumpers e risers), sendo estes os travessões e, dois cilindros que os
conectam, chamados colunas. É possível estabelecer uma relação entre os travessões e as
colunas, pela geometria da boia, uma vez que se tem a fronteira da boia previamente
definida, ilustrada na Figura 4.5.
O comprimento das colunas depende do diâmetro dos travessões, já que existe
uma área pré-definida para a boia ocupar, portanto é possível estabelecer uma relação
entre o comprimento das colunas e os diâmetros dos travessões, conforme Figura 4.11,
equação (4.7) e detalhado nos cálculos no Anexo I.
𝐿𝐶 = 36 − 𝐷𝑗 − 𝐷𝑟 (4.7)
Onde:
Dj - Diâmetro do travessão dos jumpers;
Dr - Diâmetro do travessão dos risers;
Lc - Comprimento das colunas;
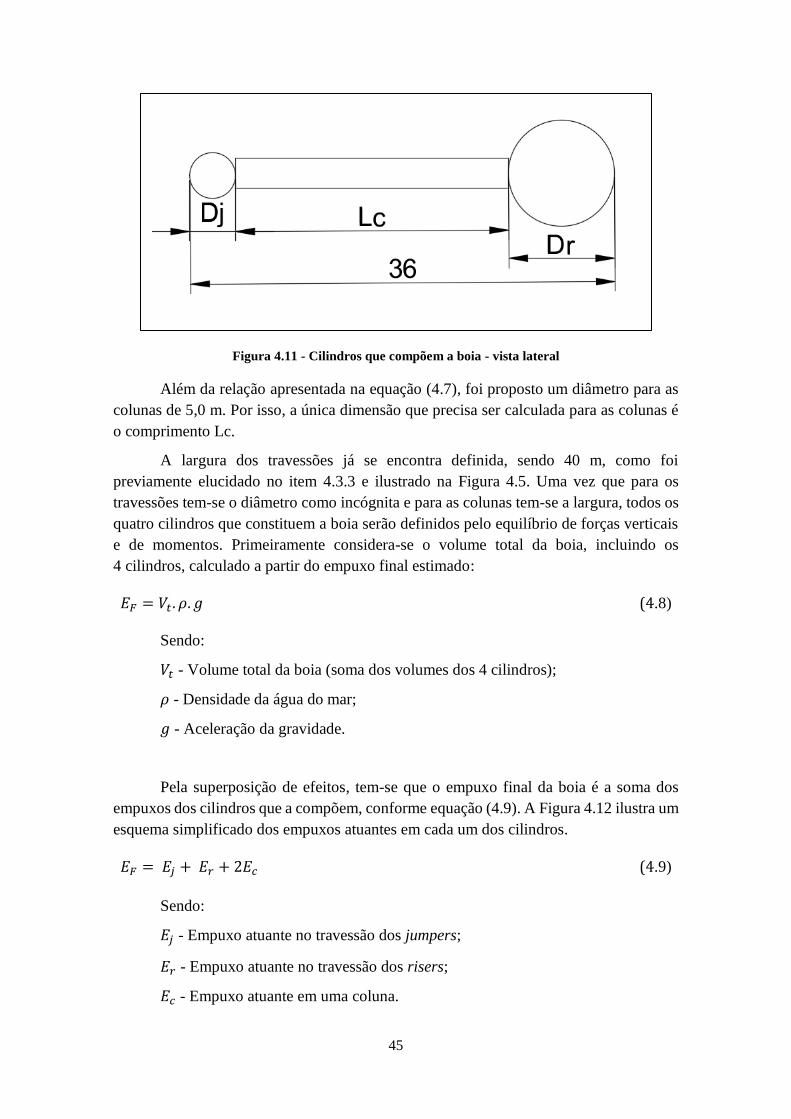
45
Figura 4.11 - Cilindros que compõem a boia - vista lateral
Além da relação apresentada na equação (4.7), foi proposto um diâmetro para as
colunas de 5,0 m. Por isso, a única dimensão que precisa ser calculada para as colunas é
o comprimento Lc.
A largura dos travessões já se encontra definida, sendo 40 m, como foi
previamente elucidado no item 4.3.3 e ilustrado na Figura 4.5. Uma vez que para os
travessões tem-se o diâmetro como incógnita e para as colunas tem-se a largura, todos os
quatro cilindros que constituem a boia serão definidos pelo equilíbrio de forças verticais
e de momentos. Primeiramente considera-se o volume total da boia, incluindo os
4 cilindros, calculado a partir do empuxo final estimado:
𝐸𝐹 = 𝑉𝑡. 𝜌. 𝑔 (4.8)
Sendo:
𝑉𝑡 - Volume total da boia (soma dos volumes dos 4 cilindros);
𝜌 - Densidade da água do mar;
𝑔 - Aceleração da gravidade.
Pela superposição de efeitos, tem-se que o empuxo final da boia é a soma dos
empuxos dos cilindros que a compõem, conforme equação (4.9). A Figura 4.12 ilustra um
esquema simplificado dos empuxos atuantes em cada um dos cilindros.
𝐸𝐹 = 𝐸𝑗 + 𝐸𝑟 + 2𝐸𝑐 (4.9)
Sendo:
𝐸𝑗 - Empuxo atuante no travessão dos jumpers;
𝐸𝑟 - Empuxo atuante no travessão dos risers;
𝐸𝑐 - Empuxo atuante em uma coluna.

46
Figura 4.12 - Vista lateral da boia - Empuxos atuantes
Incialmente se calcula os volumes dos cilindros para que a boia tenha exatamente
o empuxo final estimado neste item, conforme equação (4.10). Os valores encontrados
para os diâmetros dos travessões, apresentados na Tabela 4.10, exigiriam dimensões não
usuais de fabricação, caso a boia fosse construída, chamaremos então este de
dimensionamento teórico.
𝑉𝑡 = 𝑉𝑗 + 𝑉𝑟 + 2𝑉𝑐 (4.10)
Sendo:
𝑉𝑗 - Volume do cilindro dos jumpers, travessão dos jumpers;
𝑉𝑟 - Volume do cilindro dos risers, travessão dos risers;
𝑉𝑐 - Volume de um cilindro lateral da boia, coluna.
Uma das expressões usadas no dimensionamento simplificado foi o equilíbrio de
momentos em relação a um ponto qualquer escolhido. O ponto escolhido se situa a 1,0 m
do travessão dos risers, conforme Figura 4.13. Os empuxos não são conhecidos, por isso,
o equilíbrio de momentos não é suficiente para a definição dos cilindros. Exceto pelo peso
da boia, os braços de alavanca de todas as forças são conhecidos.

47
Legenda:
P - Peso estimado da boia;
Ej - Empuxo do travessão dos jumpers (incógnita);
Er - Empuxo do travessão dos risers (incógnita);
Er - Empuxo das colunas (incógnita);
Fj - Somatório de Foças Verticais nos jumpers;
Fr - Somatório de Foças Verticais nos risers;
Ft - Somatório de Foças Verticais nos tendões;
xB - Braço de alavanca do peso;
Figura 4.13 - Somatório de Momentos no eixo X
Uma vez que a boia é simétrica em relação aos seus eixos locais X e Z, e
assimétrica em relação ao seu eixo local Y, é preciso calcular a coordenada xCG do centro
de gravidade. Naturalmente, pela simetria da boia em relação aos demais eixos, as
coordenadas yCG e zCG coincidem com as coordenadas y e z do centro geométrico, estando
situadas no centro geométrico da boia de sustentação de risers.
Neste estudo de caso foi adotado que o xCG coincide com a coordenada x do centro
de empuxo da boia, isto fornece mais uma expressão que relaciona o centro de massa da
boia e os empuxos dos cilindros. Esta consideração faz com que os diâmetros dos
cilindros seriam definidos de maneira a equilibrar a boia em termos de momento, mesmo
que não estejam lastreados. Os cálculos desenvolvidos para o dimensionamento
simplificado se encontram no Anexo I.

48
Outra consideração tomada para o dimensionamento simplificado foi de que a
coordenada zCG da boia está abaixo da coordenada z do centro de empuxo, consideração
importante para que se mantenha a estabilidade da boia no momento da instalação. Uma
vez que a boia é simétrica em relação ao plano xy, a coordenada z do centro de empuxo
da boia se situa na coordenada z do centro geométrico da boia. Foi escolhido que o zCG
está 2,5 m abaixo da coordenada z do centro de empuxo da boia.
Portanto, o dimensionamento simplificado da boia de sustentação de risers é feito
a partir das seguintes premissas:
• O diâmetro das colunas é 5,0 m
• O comprimento das colunas é função dos diâmetros dos travessões;
• O comprimento dos travessões é 40,0 m;
• O centro de empuxo e o centro de massa estão alinhados no plano xy;
• A coordenada zCG encontra-se 2,5 m abaixo do centro de empuxo.
Com isso, o dimensionamento teórico da boia é finalizado e o resultado se
encontra na Tabela 4.10.
Tabela 4.10 - Dimensionamento teórico da boia de sustentação de Risers
Dimensionamento Teórico Valor Unidade
Comp do travessão dos jumpers 40 m
Comp do travessão dos risers 40 m
Diâmetro de cada coluna 5 m
As do travessão dos jumpers 23.0 m²
As do travessão dos risers 142.5 m²
As de cada coluna 19.6 m²
Vol do trav dos jumpers 919.8 m³
Vol do trav dos risers 5701.8 m³
Vol de cada coluna 336.1 m³
Empuxo do travessão dos jumpers 9249.1 kN
Empuxo do travessão dos risers 57333.3 kN
Empuxo de cada coluna 3379.5 kN
Empuxo total das colunas 6759.0 kN
Empuxo final da boia 73341.3 kN
Erro do Empuxo 1.9 kN
Erro percentual do empuxo 0.00% -
Diâmetro do trav dos jumpers 5.411 m
Diâmetro do trav dos risers 13.472 m
xCG 6.505 m
Em seguida, os valores encontrados são levemente alterados para que os cilindros
tenham dimensões construtivas, sendo este o dimensionamento prático. O
dimensionamento prático foi calculado com base nas mesmas premissas adotadas para o
cálculo do dimensionamento teórico. O empuxo da boia modelada é então calculado com

49
os valores calibrados e a partir deste empuxo estima-se o peso da boia, os valores
encontrados no dimensionamento prático são apresentados na Tabela 4.11.
Tabela 4.11 - Dimensionamento prático da boia de sustentação de Risers
Dimensionamento Prático Valor Unidade
Comp do travessão dos jumpers 40 m
Comp do travessão dos risers 40 m
Diam de cada coluna 5 m
As do travessão dos jumpers 22.5 m²
As do travessão dos risers 143.1 m²
As de cada coluna 19.6 m²
Vol do trav dos jumpers 899.2 m³
Vol do trav dos risers 5725.6 m³
Vol de cada coluna 336.7 m³
Empuxo do travessão dos jumpers 9041.7 kN
Empuxo do travessão dos risers 57571.9 kN
Empuxo de cada coluna 3386.0 kN
Empuxo total das colunas 6772.0 kN
Empuxo total da boia 73385.6 kN
Erro do Empuxo 0.6 kN
Erro percentual do empuxo 0.00% -
Diâmetro do trav dos jumpers 5.35 m
Diâmetro do trav dos risers 13.5 m
xCG 6.693 m
Ambos os dimensionamentos, prático e teórico, foram modelados no Situa/Prosim 2, a
título de comparação dos resultados obtidos. Os parâmetros de modelagem das duas
boias, teórica e prática se encontram na Tabela 4.12. A boia de sustentação de risers
modelada no Situa/Prosim 2 é ilustrada na Figura 4.14.
Tabela 4.12 - Dimensionamento da boia de sustentação de Risers
Parâmetros de Modelagem da Boia de Sustentação de Risers
Dimensionamento Diâmetro
Colunas (m)
Diâmetro
Trav. Jumpers (m)
Diâmetro
Trav. Risers (m)
Peso
calculado (kN) xCG (m)
Teórico 5.000 5.411 13.472 24446 6.505
Prático 5.000 5.350 13.500 24492 6.693

50
Figura 4.14 - Boia de Sustentação de risers modelada no Situa/Prosim 2
O equilíbrio estático de todo o sistema é simulado no Situa/Prosim 2 e os
movimentos da boia para os dimensionamentos teórico e prático são apresentados na
Tabela 4.13. Nota-se que os resultados são menores para o dimensionamento prático e
apenas esta boia será considerada nas análises dinâmicas. Os resultados de deslocamento
em Y, rotação em X e rotação em Z iguais a zero são coerentes, em decorrência da
simetria do sistema.
Tabela 4.13 - Movimentos da boia de sustentação de Risers
Movimentos da Boia de Sustentação de Risers na Estática
Dimensionamen
to
Deslocamen
to em X (m)
Deslocamen
to em Y (m)
Deslocamen
to em Z (m)
Rotaçã
o em X
(°)
Rotação
em Y (°)
Rotaçã
o em Z
(°)
Teórico 0.2708 0.0000 0.0800 0.0000 0.0626 0.0000
Prático 0.2350 0.0000 0.0699 0.0000 0.0495 0.0000
Com os resultados obtidos na análise estática conclui-se que a boia dimensionada
simplificadamente está equilibrada na estática. O sistema BSR está modelado de forma
fracamente acoplada, podendo então ser analisado o seu comportamento dinâmico,
apresentado no item a seguir.

51
4.4.4 Coeficientes Hidrodinâmicos
Os cilindros são analisados segundo a equação de Morison. A equação de Morison
é definida em (4.11).
𝐹 =1
2𝜌𝑤𝐷𝐶𝑑|�� − ��|(�� − ��) + 𝜌𝑤
𝜋𝐷2
4𝐶𝑚�� − 𝜌𝑤
𝜋𝐷2
4𝐶𝑎�� (4.11)
Sendo:
𝐹 - Força no cilindro;
𝜌𝑤 - Densidade da água do mar;
𝐷 - Diâmetro do cilindro;
𝐶𝑑 - Coeficiente de amortecimento viscoso;
𝐶𝑚 - Coeficiente de massa adicionada;
𝐶𝑎 - Coeficiente de massa arrasto;
�� - Velocidade do fluido;
�� - Velocidade do corpo;
�� - Aceleração do corpo.
Os coeficientes Cd, Cm e Ca são adimensionais e para os quatro cilindros que
compõem a boia são apresentados na Tabela 4.14.
Tabela 4.14 - Coeficientes hidrodinâmicos dos cilindros
Cilindro CDY CDZ CAY CAZ CDX1 CDX2 CAX1 CAX2
Colunas 0.315 0.63 0.92 0.92 0 0 0 0
Travessão dos jumpers 0.318 0.63 0.98 0.98 1 1 1 1
Travessão dos risers 0.504 0.63 0.90 0.90 1 1 1 1

52
4.5 Análises Dinâmicas Fracamente Acopladas
4.5.1 Carregamento Ambiental
Para o estudo do comportamento dinâmico do sistema BSR foram considerados
oito estados de mar diferentes, com onda e correnteza atuando alinhadas no sistema
offshore deste estudo de caso. É importante notar que o Situa/Prosim 2 segue a convenção
usual de definição de direções de onda e correnteza, sendo ambas referenciadas ao norte
geográfico. A convenção para as correntezas é “para onde vai”, por exemplo, a corrente
com direção E, vai para leste. Já a convenção de ondas é “de onde vem”, portanto, uma
onda E vem de leste, e vai para oeste.
Para alinhar as respectivas ondas e correntezas deve-se adotar uma das
convenções e ao aplicar o caso de carregamento ter em vista que o par deve ter a direção
oposta. Neste estudo de caso foi adotada a convenção das correntezas, “para onde vai”
ilustrada na Figura 4.15, portanto na definição dos casos de carregamento, as ondas são
consideradas com o sentido oposto, como evidenciado na Tabela 4.15. É considerado mar
irregular com 3,0 m de altura significativa de onda e período de pico de 10 s; e correnteza
triangular com velocidade de 1,0 m/s na superfície. A Tabela 4.15 apresenta os casos de
carregamento ambientais considerados nas análises dinâmicas. As análises simulam uma
hora de estado de mar, com isto as análises dinâmicas foram rodadas até 3.600 segundos.
Tabela 4.15 - Casos de carregamento ambiental
Caso de
carregamento
Onda Correnteza
Direção Hs (m) Tp (s) Direção Vel na superfície (m/s)
1 S 3.0 10 N 1.0
2 SW 3.0 10 NE 1.0
3 W 3.0 10 E 1.0
4 NW 3.0 10 SE 1.0
5 N 3.0 10 S 1.0
6 NE 3.0 10 SW 1.0
7 E 3.0 10 W 1.0
8 SE 3.0 10 NW 1.0
Resumindo, a convenção de direções de carregamentos ambientais do
Situa/Prosim 2 é:
• Correntezas: para onde vai;
• Ondas: de onde vem.
A convenção adotada para o estudo de caso foi a das correntezas, portanto quando
se referencia a um dos casos de carregamento pela direção dos carregamentos, que são
alinhados, nota-se que esta é a direção para onde o carregamento vai, conforme ilustrado

53
na Figura 4.15. O aproamento do navio com o norte geográfico é 180°, estando aproado
para sul.
Figura 4.15 – Carregamentos ambientais aplicados – Convenção de correntezas
Proa
Popa
S
N
E W
Norte Geográfico

54
4.5.2 Movimentos da boia
Neste item os movimentos obtidos para a boia de sustentação de risers nos oito
casos de carregamentos dinâmicos são apresentados, além de considerações sobre o
comportamento da boia nos seis graus de liberdade. A Figura 4.16 apresenta os eixos
locais da boia e a convenção de direções para os movimentos de corpo rígido dela.
Figura 4.16 – Movimentos da Boia de Sustentação de Risers – vista isométrica no Situa/Prosim 2
Na Tabela 4.16 estão os resultados de deslocamentos e rotações da BSR nas
simulações dinâmicas.
Deslocamento em Z
Rotação em Z

55
Tabela 4.16 – Movimentos da Boia de Sustentação de Risers
Observando os resultados na Tabela 4.16 pode-se notar que, para duas direções
opostas, os deslocamentos são bastante próximos em módulo - com exceção do
deslocamento em Z que será pontuado adiante - porém com sinais invertidos. É
importante notar a diferença entre as simetrias, o sistema BSR é simétrico em relação ao
plano XZ, e a boia é simétrica em relação aos planos locais xy e xz.
Uma vez que os movimentos de primeira ordem da embarcação influenciam
pouco no movimento da boia, e esta se situa abaixo da zona de atuação das ondas, pode-
se concluir que o carregamento que provoca mais movimento na boia é a correnteza
triangular aplicada no modelo dinâmico. As forças de primeira ordem do FPSO,
transferidas à boia pelos jumpers se mostram baixas, já que os resultados praticamente
não mudam para direções opostas de carregamento.
Para auxiliar no entendimento do comportamento dinâmico da boia foram
elaborados gráficos para cada grau de liberdade de movimento e rotação. Os itens a seguir
apresentam estes gráficos e as conclusões pertinentes a cada caso de carregamento. As
simulações dinâmicas consideram um estado de mar de uma hora, e os resultados
apresentados são referentes à configuração de equilíbrio que a boia obteve durante estas
simulações.
Caso de
carregamento Direção
Desl em
X (m)
Desl em
Y (m)
Desl em
Z (m)
Rotação
em X (°)
Rotação
em Y (°)
Rotação
em Z (°)
1 N -1.866 93.673 -2.660 1.712 0.034 7.068
2 NE 27.753 57.997 -3.517 0.319 -0.900 5.332
3 E 38.806 0.000 -3.724 0.004 -1.763 -0.001
4 SE 27.747 -57.977 -3.515 -0.322 -0.895 -5.323
5 S -1.882 -93.672 -2.661 -1.716 0.017 -7.070
6 SW -28.921 -65.071 0.826 -1.893 1.043 -4.549
7 W -40.360 0.001 2.839 0.004 1.196 0.000
8 NW -28.917 65.068 0.832 1.890 1.083 4.539

56
(a) Deslocamento em X
A Figura 4.17 apresenta um gráfico tipo radar que resume os deslocamentos
obtidos no eixo local X da boia, em metros, em todos os casos de carregamentos
ambientais analisados no estudo de caso.
Figura 4.17 – Deslocamento em X da Boia de Sustentação de Risers
Os maiores deslocamentos da boia de sustentação de risers ocorreram sob as
condições de carregamento alinhadas nas direções leste e oeste, o que já era esperado,
visto que o offset da boia acompanha o sentido de carregamento. Uma vez que a distância
entre o FPSO e a boia é de 350 m, e o maior deslocamento obtido foi de 40 m, podemos
concluir que este é um deslocamento aceitável.
0
15
30
45N
NE
E
SE
S
SW
W
NW
BSR - Deslocamento em X
Deslocamento
em X máximo: 40 m – E e W
X Y

57
(b) Deslocamento em Y
A Figura 4.18 apresenta um gráfico tipo radar que resume os deslocamentos
obtidos no eixo local Y da boia, em metros, em todos os casos de carregamentos
ambientais analisados no estudo de caso.
Figura 4.18 – Deslocamento em Y da Boia de Sustentação de Risers
O deslocamento em Y apresenta o maior valor para os carregamentos ambientais
atuantes alinhados com eixo Y da boia, norte e sul. O deslocamento em Y foi o maior
deslocamento transversal da boia, tendo um valor máximo de 94 m, isso se explica pela
baixa rigidez do sistema BSR no eixo Y. Nota-se também a simetria dos deslocamentos
para direções opostas, sendo coerentes em razão da simetria do sistema BSR.
Os ângulos de topo dos tendões garantem o equilíbrio do sistema no eixo X, pois
estes estão inclinados na direção X. Os movimentos de deslocamento em Y para os
carregamentos ambientais atuantes na direção leste e oeste foram zero, evidenciando que
o sistema apresenta grande rigidez em X.
0
20
40
60
80
100N
NE
E
SE
S
SW
W
NW
BSR - Deslocamento em Y
Deslocamento
em Y máximo: 94 m – N e S
X Y

58
(c) Deslocamento em Z
A Figura 4.19 apresenta um gráfico tipo radar que resume os deslocamentos
obtidos no eixo local Z da boia, em metros, para todos os casos de carregamentos
ambientais analisados no estudo de caso.
Figura 4.19 – Deslocamento em Z da Boia de Sustentação de Risers
A Figura 4.19 evidencia que os movimentos verticais da boia foram baixos em
todos os casos de carregamentos. Os tendões constantemente tracionados proporcionam
uma rigidez à boia, o que explica os baixos movimentos na vertical encontrados nas
simulações dinâmicas.
Movimentos negativos de deslocamento em Z devem ser evitados, já que podem
causar uma compressão no topo dos tendões, visto que os tendões estão constantemente
tracionados, como apresentado adiante no item 4.5.3(b), os movimentos de deslocamento
em Z negativos encontrados não causam problemas aos tendões.
0.0
1.0
2.0
3.0
4.0N
NE
E
SE
S
SW
W
NW
BSR - Deslocamento em Z
Deslocamento
em Z máximo:
3.7 m - E
X Y

59
(d) Rotação em torno do eixo X
A Figura 4.20 apresenta um gráfico tipo radar que resume as rotações obtidas em
torno do eixo local X da boia, em graus, em todos os casos de carregamentos ambientais
analisados no estudo de caso.
Figura 4.20 – Rotação em X da Boia de Sustentação de Risers
A Tabela 4.16 e a Figura 4.20 mostram que o rotação em X encontrado para as
direções leste e oeste foi zero, e próximos de zero para as direções nordeste e sudeste.
Pode ser observado que o gráfico da rotação em X é semelhante ao gráfico do
deslocamento em Y, e de fato a rotação em X está relacionada ao deslocamento em Y,
uma vez que as rotações observadas em X estão associadas aos deslocamentos em Y,
acompanhando o sentido do carregamento.
Os deslocamentos encontrados em Y foram zero para as direções leste e oeste,
desta maneira os braços de alavanca das forças das linhas permanecem constante, e como
partimos do equilíbrio estático calculado neste trabalho, é natural que o sistema se
mantenha na posição de equilíbrio. Já as rotações encontradas para as direções norte, sul,
sudoeste e noroeste ocorrem uma vez foram encontrados deslocamentos expressivos em
Y para estas direções.
0.0
1.0
2.0N
NE
E
SE
S
SW
W
NW
BSR - Rotação em X
Rotação em X
máxima: 1.9° - NW e SW
X Y
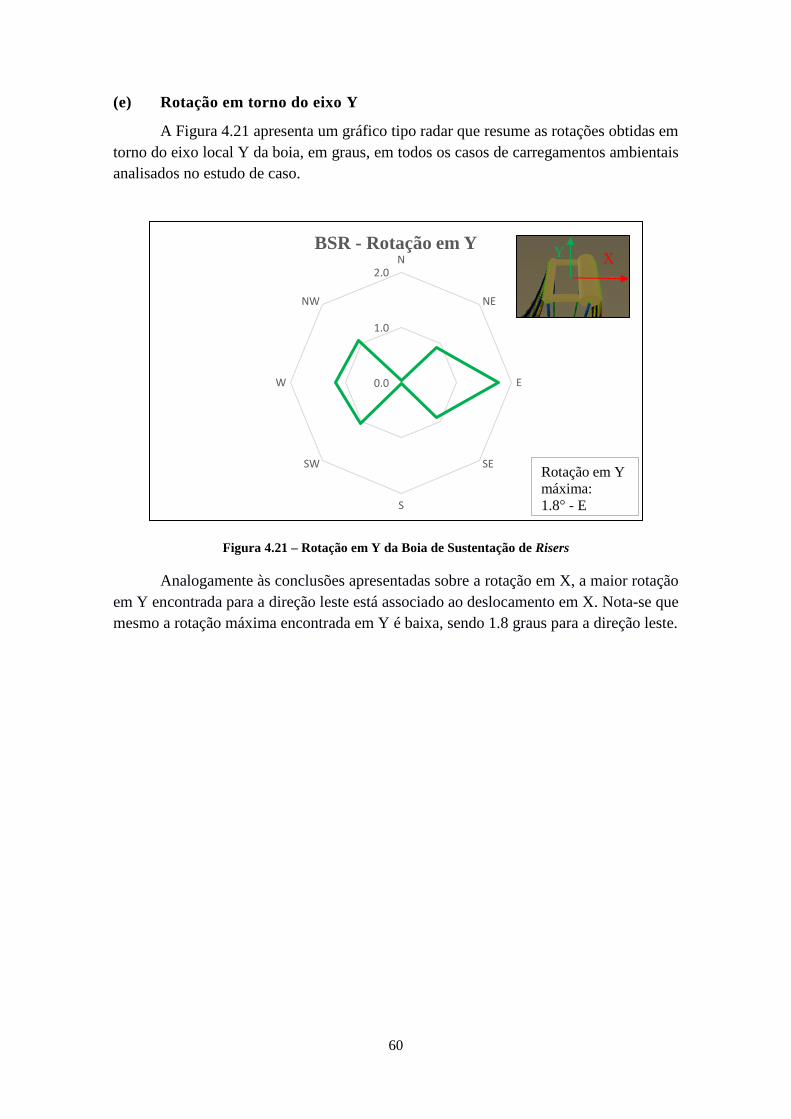
60
(e) Rotação em torno do eixo Y
A Figura 4.21 apresenta um gráfico tipo radar que resume as rotações obtidas em
torno do eixo local Y da boia, em graus, em todos os casos de carregamentos ambientais
analisados no estudo de caso.
Figura 4.21 – Rotação em Y da Boia de Sustentação de Risers
Analogamente às conclusões apresentadas sobre a rotação em X, a maior rotação
em Y encontrada para a direção leste está associado ao deslocamento em X. Nota-se que
mesmo a rotação máxima encontrada em Y é baixa, sendo 1.8 graus para a direção leste.
0.0
1.0
2.0N
NE
E
SE
S
SW
W
NW
BSR - Rotação em Y
Rotação em Y
máxima:
1.8° - E
X Y

61
(f) Rotação em torno do eixo Z
A Figura 4.22 apresenta um gráfico tipo radar que resume as rotações obtidas em
torno do eixo local Z da boia, em graus, em todos os casos de carregamentos ambientais
analisados no estudo de caso.
Figura 4.22 – Rotação em Z da Boia de Sustentação de Risers
Na Figura 4.22 e na Tabela 4.16 pode ser observado que as rotações em torno do
eixo Z local da boia foram as maiores rotações encontradas nas simulações dinâmicas,
tendo um valor máximo de 7.0 graus para as direções norte e sul.
Esses valores surgem principalmente para carregamentos na direção N e S, pois
as forças de arrasto horizontais são maiores no travessão dos risers do que no travessão
dos jumpers. Sendo assim, a diferença entre essas forças gera um binário que faz a boia
girar.
Observa-se que o mesmo não acontece para as direções E e W, pois a boia é
simétrica com relação ao plano xz em termos de força de arrasto.
0.0
2.0
4.0
6.0
8.0N
NE
E
SE
S
SW
W
NW
BSR - Rotação em Z
Rotação em Z
máxima:
7.0° - N e S
X
Y

62
4.5.3 Esforços nas linhas
Para estudo do comportamento dinâmico das linhas serão apresentadas trações
máximas e mínimas nos risers e jumpers, além dos raios mínimos de curvatura
encontrados ao longo de cada linha. Naturalmente, as trações máximas encontradas se
encontram no topo dos risers e na conexão dos jumpers com o FPSO, por esta conexão
estar sempre mais tracionada do que a conexão com a boia, devido ao comprimento
suspenso apoiado no FPSO. É importante avaliar as trações mínimas também, para
verificar se há ocorrência de compressão nas linhas.
Para os tendões faz-se a avaliação apenas em termos de trações, máxima no topo
e mínimas, para verificar se a linha se mantém tracionada.
Os resultados completos das simulações dinâmicas das linhas estão no Anexo II,
no qual se apresenta as trações máximas e mínimas obtidas para cada linha em cada
análise, além do raio de curvatura para os risers e jumpers. Neste item é apresentado um
resumo dos resultados das linhas, juntamente com as considerações pertinentes a serem
feitas para as linhas que compõem o sistema BSR.
(a) Risers e jumpers
A seguir, na Tabela 4.17 são apresentadas as envoltórias de trações máximas e
mínimas das linhas de produção, considerando todos os casos de carregamento ambiental
do estudo de caso.
Tabela 4.17 – Envoltórias de esforços nas linhas
Nota: RC – raio de curvatura
Todos os raios de curvatura da Tabela 4.17 são referentes aos umbilicais, que
foram as linhas que apresentaram menores raios de curvatura em todas as análises.
Pela Figura 4.23 fica claro que a envoltória de forças axiais mínimas nos jumpers
apresentou apenas esforços de trações, além disso percebe-se que as forças foram bastante
RC (m) RC (m)
Mínima Máxima Mínimo Mínima Máxima Mínimo
N 10.1 758.2 67.3 N -7.0 1977.6 42.2
NE 11.7 771.7 70.4 NE 3.4 1893.2 46.4
E 11.2 819.1 68.4 E 18.7 1766.0 75.2
SE 11.9 773.7 70.3 SE 18.7 1891.5 77.5
S 9.7 756.9 67.3 S -7.4 1977.4 41.5
SW 11.2 774.0 60.1 SW 22.3 1984.2 77.4
W 7.5 866.1 54.2 W 34.5 1873.5 147.6
NW 7.6 779.2 60.1 NW 21.4 1984.3 86.2
Trações (kN)Direção
Trações (kN)Direção
RisersJumpers

63
semelhantes para direções opostas, com uma ligeira diferença para os pares leste-oeste e
sudeste-noroeste.
Figura 4.23 – Envoltória de Trações Mínimas nos jumpers
Figura 4.24 – Envoltória de Trações Mínimas nos risers
Houve uma pequena compressão para as direções norte e sul, como evidenciado
na Figura 4.24. No Anexo II estão apresentados todos os resultados obtidos para as linhas
nas análises dinâmicas, pode ser observado que só houve compressão para as direções
norte e sul, e para apenas uma linha em cada caso de carregamento, sendo o umbilical
mais externo do arranjo de risers, para norte o R19 – Umb 4 e para sul o R01 Umb.
0
5
10
15
20
25
30
35
40
Tra
ção
(kN
)
Envoltória de Trações Mínimas nos jumpers
N NE E SE S SW W NW
-10
-5
0
5
10
15
20
25
30
35
40
Tra
ção (
kN
)
Envoltória de Trações Mínimas nos risers
N NE E SE S SW W NW

64
A Figura 4.25 apresenta a envoltória das trações máximas nos jumpers e a Figura
4.26 a envoltória das trações máximas nos risers.
Figura 4.25 – Envoltória de Trações Máximas nos jumpers
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
Tra
ção
(kN
)Envoltória de Trações Máximas nos jumpers
N NE E SE S SW W NW

65
Figura 4.26 – Envoltória de Trações Máximas nos risers
Para avaliar a diferença de esforços nas linhas, em relação à função desempenhada
são apresentados os resultados obtidos na direção leste para cada tipo de riser e jumper,
encontrados na Tabela 4.18.
Tabela 4.18 – Maiores esforços nas linhas (por função) na direção leste
Linha
Jumpers Risers
Trações (kN) RC (m) Trações (kN) RC (m)
Mínima Máxima Mínimo Mínima Máxima Mínimo
Umb 11.2 100.9 68.4 18.7 353.5 75.2
PO 59.2 437.9 70.8 154.9 1262.9 234.6
GL 136.6 777.9 80.8 198.6 1766.0 211.1
IG 124.8 819.1 73.9 167.1 1733.2 178.0
SERV 28.8 200.8 74.5 98.5 1533.9 122.7
IA 55.5 366.8 76.1 162.6 1481.0 204.9
Nota: RC – raio de curvatura
A Tabela 4.18 mostra que as linhas que têm maiores trações sãos as linhas de
injeção de gás e de gás lift, devido ao maior peso específico do gás, dentre os fluidos que
podem passar pelos vários tipos de linhas. Os umbilicais apresentam trações baixas em
comparação ao restante das linhas justamente pela ausência de fluido, uma vez que são
compostos por cabos de controle do poço, e os menores raios de curvatura são
encontrados para os umbilicais.
Percebe-se também que os raios de curvatura são elevados e não variam
substancialmente entre as linhas. Por isso serão apresentados gráficos ilustrativos da
Tabela 4.18 apenas para as trações máximas e mínimas das linhas, sendo as forças
apresentadas a envoltória para cada tipo de riser e jumper, para a direção leste.
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
Tra
ção
(kN
)
Envoltória de Trações Máximas nos risers
N NE E SE S SW W NW

66
A Figura 4.27 apresenta a envoltória das trações mínimas nos jumpers e a Figura
4.28 a envoltória das trações mínimas nos risers na direção leste. Tanto para os risers
quanto para os jumpers, foram encontradas apenas tensões axiais positivas, sendo assim
as linhas se encontram constantemente tracionadas, não apresentando problemas de
compressão na direção leste.
Figura 4.27 – Envoltória de Trações Mínimas nos jumpers – direção leste
Figura 4.28 – Envoltória de Trações Mínimas nos risers – direção leste
A Figura 4.29 apresenta a envoltória das trações máximas nos jumpers e a Figura
4.30 a envoltória das trações máximas nos risers, na direção leste.
0
20
40
60
80
100
120
140
160
180
200
220
Tra
ção
(kN
)
Envoltória de Trações Mínimas nos Jumpers
Umb PO GL IG SERV IA
0
20
40
60
80
100
120
140
160
180
200
220
Tra
ção (
kN
)
Envoltória de Trações Mínimas nos Risers
Umb PO GL IG SERV IA

67
Figura 4.29 – Envoltória de Trações Máximas nos jumpers – direção leste
Figura 4.30 – Envoltória de Trações Máximas nos risers – direção leste
A Figura 4.23 apresenta a envoltória das trações mínimas nos jumpers e a Figura
4.24 a envoltória das trações mínimas nos risers.
0
200
400
600
800
1000
1200
1400
1600
1800
Tra
ção
(kN
)
Envoltória de Trações Máximas nos Jumpers
Umb PO GL IG SERV IA
0
200
400
600
800
1000
1200
1400
1600
1800
Tra
ção (
kN
)
Envoltória de Trações Máximas nos Risers
Umb PO GL IG SERV IA

68
(b) Tendões
Para os tendões foram avaliadas as trações máximas de topo e a ocorrência de
compressão, que não foi identificada, conforme apontam os resultados de força axial
mínima nos tendões na Tabela 4.19, sendo todas positivas, indicando que os tendões
permanecem tracionados ao longo das simulações dinâmicas. As trações no topo dos
tendões são altas, porém compatíveis com a resistência axial dos tendões. Os tendões são
numerados conforme ilustrado na Figura 4.31.
Figura 4.31 – Tendões
Tabela 4.19 – Trações nos Tendões
Mínima Máxima Mínima Máxima Mínima Máxima Mínima Máxima
N 3729 6143 3560 6212 4227 5766 3033 6678
NE 4255 6332 4150 6382 4141 5770 3584 6246
E 3558 6213 3728 6142 3027 6685 4211 5771
SE 4146 6384 4256 6332 3569 6256 4154 5763
S 3558 6213 3728 6142 3027 6685 4211 5771
SW 3406 5639 3443 5680 3582 6309 4127 5895
W 3907 5141 3907 5141 4064 5902 4064 5902
NW 3443 5681 3411 5637 4117 5911 3606 6295
Direção
Tendão 1
Trações (kN)
Tendão 2
Trações (kN)
Tendão 3
Trações (kN)
Tendão 4
Trações (kN)
Tendão 1
Tendão 2 Tendão 4
Tendão 3

69
Os gráficos apresentados na Figura 4.32, na Figura 4.33, na Figura 4.34 e na
Figura 4.35 mostram as trações de topo em cada tendão, nos oito casos de carregamento
do estudo de caso. É fácil notar que as forças nos tendões não variam muito entre eles
para um mesmo caso de carregamento, tampouco para o mesmo tendão nos oito casos de
carregamento.
Figura 4.32 – Tração no topo do tendão 1
Figura 4.33 – Tração no topo do tendão 2
0
1000
2000
3000
4000
5000
6000
7000
Tra
ção
(kN
)
Trações no Topo do Tendão 1
N NE E SE S SW W NW
0
1000
2000
3000
4000
5000
6000
7000
Tra
ção (
kN
)
Trações no Topo do Tendão 2
N NE E SE S SW W NW
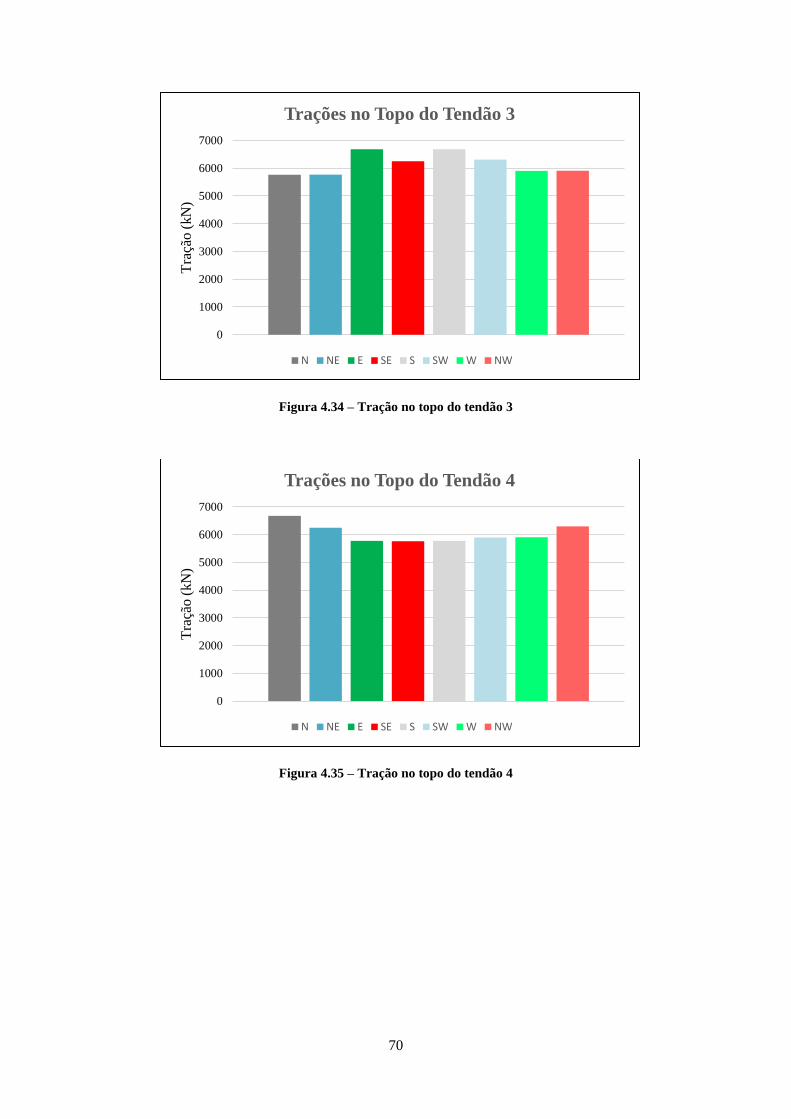
70
Figura 4.34 – Tração no topo do tendão 3
Figura 4.35 – Tração no topo do tendão 4
0
1000
2000
3000
4000
5000
6000
7000
Tra
ção
(kN
)
Trações no Topo do Tendão 3
N NE E SE S SW W NW
0
1000
2000
3000
4000
5000
6000
7000
Tra
ção (
kN
)
Trações no Topo do Tendão 4
N NE E SE S SW W NW

71
5 TRABALHOS FUTUROS
5.1 Malha em elementos finitos com formulação fortemente acoplada
No modelo fortemente acoplado, tanto as linhas quanto a UF são representadas
por malhas de elementos finitos, que conectadas formam um grande sistema estrutural a
ser analisado com matriz de rigidez única.
Entretanto, observa-se que os cilindros das boias não compartilham o mesmo nó
na malha de elementos finitos. Sendo assim, é preciso criar os chamados dummy members
que ligam os cilindros entre si e as conexões das linhas à malha de elementos finitos da
boia. Os dummy members precisam ser elementos com uma alta rigidez e massa muito
pequena, para garantir o acoplamento entre os elementos do sistema, sem adicionar massa
a ele.
Como o Situa 2 considera as curvaturas iniciais das linhas modeladas e a boia tem
que ser modelada sem curvatura inicial, uma opção para que parte da malha da boia não
considerasse a curvatura inicial seria rotular cada elemento finito de pórtico da boia na
sua extremidade. Entretanto, isso geraria um sistema hipostático e mais dummy members
devem ser acrescentados.
A seguir apresenta-se um passo a passo de proposta de uma malha estável
utilizando-se conceitos de treliça espacial.
Na Figura 5.1 pode-se notar que a malha de elementos finitos da boia é definida
por barras no eixo de cada cilindro, representadas pelas linhas vermelhas. Para ligar os
eixos das colunas e dos travessões tem-se os dummy members em azul claro, além disso
fazem a conexão com o xCG. Os dummy members que conectam as linhas à malha de
elementos finitos da boia são representados em verde, e o contorno da boia é apresentado
para fins de visualização, já que a solução estrutural para a malha de elementos finitos da
boia não comtempla os cilindros. As conexões, representadas em amarelo, também estão
inclusas apenas a título de visualização.
Conforme explicado no item 3.5, para considerar os movimentos de corpo rígido
da boia no modelo em elementos finitos fortemente acoplado é necessário criar um nó no
centro de massa da boia de sustentação de risers e conectar o centro de massa às barras
que representam os cilindros na malha em elementos finitos, os dummy members em azul
claro localizados no perímetro interno da boia são os responsáveis por esta consideração,
sendo o nó que os conecta é o xCG. Em decorrência da simetria em Y e Z estes dummy
members foram modelados no plano XY.
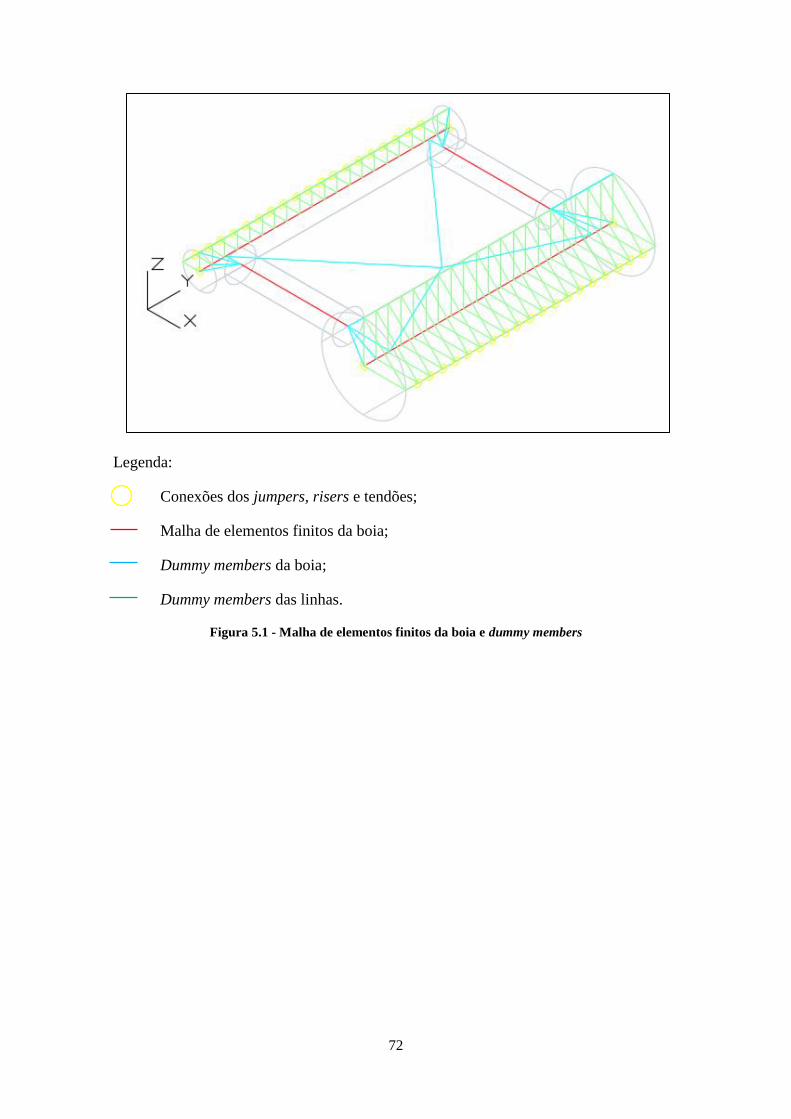
72
Legenda:
Conexões dos jumpers, risers e tendões;
Malha de elementos finitos da boia;
Dummy members da boia;
Dummy members das linhas.
Figura 5.1 - Malha de elementos finitos da boia e dummy members

73
A Figura 5.2 representa os dummy members criados para enrijecer sistema no eixo
XY, na cor rosa.
Legenda:
Conexões dos jumpers, risers e tendões;
Malha de elementos finitos da boia;
Dummy members da boia;
Dummy members das linhas;
Dummy members que conferem rigidez no eixo XY.
Figura 5.2 - Malha de elementos finitos da boia e dummy members - Rigidez no eixo XY

74
A Figura 5.3 representa os dummy members criados para enrijecer sistema no
eixo YZ, na cor azul.
Legenda:
Conexões dos jumpers, risers e tendões;
Malha de elementos finitos da boia;
Dummy members da boia;
Dummy members das linhas;
Dummy members que conferem rigidez no eixo YZ.
Figura 5.3 - Malha de elementos finitos da boia e dummy members - Rigidez no eixo YZ

75
A Figura 5.4 representa os dummy members criados para enrijecer sistema no eixo
YZ, na cor azul.
Legenda:
Conexões dos jumpers, risers e tendões;
Malha de elementos finitos da boia;
Dummy members da boia;
Dummy members das linhas;
Dummy members que conferem rigidez no eixo XZ.
Figura 5.4 - Malha de elementos finitos da boia e dummy members - Rigidez no eixo XZ

76
A malha completa do sistema BSR proposta como solução estrutural em
elementos finitos no Situa/Prosim 2 é ilustrada na Figura 5.5.
Legenda:
Conexões dos jumpers, risers e tendões;
Malha de elementos finitos da boia;
Dummy members da boia;
Dummy members das linhas;
Dummy members que conferem rigidez no eixo XY;
Dummy members que conferem rigidez no eixo YZ;
Dummy members que conferem rigidez no eixo XZ;
Figura 5.5 - Malha de elementos finitos completa da boia e dummy members

77
5.2 Modelo estrutural da malha de elementos finitos
A malha de elementos finitos proposta no item anterior foi modelada em um
programa de análise estrutural para que fosse verificada a estabilidade desse sistema
estrutural que representa a boia.
Os resultados mostraram que a boia é estável.
O capítulo seguinte apresenta as principais conclusões obtidas neste trabalho, e
introduz algumas outras considerações sobre o trabalho futuro que se pretende
desenvolver do sistema BSR fortemente acoplado.

78
6 CONCLUSÕES E CONSIDERAÇÕES FINAIS
A engenharia brasileira enfrenta desafios cada vez maiores, sendo a descoberta e
a exploração do pré- sal um marco na engenharia nacional. Neste trabalho foram
apontados alguns desafios envolvidos no projeto de estruturas offshore situados em
lâminas d’água profundas, além do estudo de caso desenvolvido que engloba o
dimensionamento simplificado de um sistema de risers em lâmina d’água profunda e o
estudo do comportamento dinâmico do sistema proposto.
Os resultados das análises dinâmicas mostram que o dimensionamento
simplificado proposto neste estudo parece ser satisfatório, uma vez que o sistema BSR
fracamente acoplado apresentou um bom comportamento quando submetido à
carregamentos ambientais. Um estudo mais detalhado seria necessário para essa
verificação.
As considerações feitas sobre a modelagem fortemente acoplada evidenciam a
necessidade de uma malha robusta em elementos finitos para modelar corretamente o
sistema BSR deste estudo de caso. A malha em elementos finitos proposta é apenas uma
das infinitas malhas possíveis para este sistema, podendo esta ser otimizada com a
utilização do menor número de elementos finitos possível.
Para trabalhos futuros, sugere-se a modelagem e otimização da malha apresentada
em elementos finitos com formulação fortemente acoplada do sistema BSR,
dimensionado simplificadamente neste estudo de caso. Desta forma o sistema poderá ser
analisado de pela metodologia fortemente acoplada, e assim, será possível comparar os
resultados das análises fortemente e fracamente acopladas.

79
7 REFERÊNCIAS BIBLIOGRÁFICAS
[1] JACOB, B.P., Programa PROSIM - Simulação Numérica do Comportamento de
Unidades Flutuantes Ancoradas, Versão 3.0 - Manual Teórico,
LAMCSO/COPPE/UFRJ, Programa de Engenharia Civil, Rio de Janeiro, 2006.
[2] BAHIENSE, R. A., Implementação e Avaliação de uma Metodologia Fortemente
Acoplada para Análise de Sistemas Flutuantes Offshore, Dissertação de M.Sc.,
COPPE/UFRJ, Programa de Engenharia Civil, Rio de Janeiro, RJ, Brasil, 2007.
[3] ARAUJO NETO, E.D., Proposta e Avaliação de um Método com Alternância de
Cabos para a Instalação de Equipamentos Submarinos, Dissertação de M.Sc.,
COPPE/UFRJ, Programa de Engenharia Civil, Rio de Janeiro, RJ, Brasil, 2017.
[4] FARIAS, N.S., Influência da Discretização de Espectros de Onda na Resposta de
Movimento de Plataformas Flutuantes Offshore, Dissertação de M.Sc.,
COPPE/UFRJ, Programa de Engenharia Civil, Rio de Janeiro, RJ, Brasil, 2017.
[5] BOGARIN, J.F., Protótipo de Sistema Especialista para Análise do Comportamento
Mecânico Local de Risers Flexíveis, Dissertação de M.Sc., COPPE/UFRJ, Programa
de Engenharia Civil, Rio de Janeiro, RJ, Brasil, 1990.
[6] LIMA, D.A., Avaliação de Formulações de Análise e Metodologias de Projeto de
Sistemas de Ancoragem de Plataformas Offshore considerando Aspectos de Projeto
de Risers, Dissertação de M.Sc., COPPE/UFRJ, Programa de Engenharia Civil, Rio
de Janeiro, RJ, Brasil, 2011.
[7] CORRÊA, F.J.B., Semi-Coupled Scheme for the Analysis of Floating Production
Systems, em International Conference on Ocean.Offshore and Artic Engineering
(OMAE), Nantes, France, 2013.
[8] WAMIT, A Radiation-Difraction Panel Program for Wave-Body Interactions,
Versão 5.3, em Department of Ocean Engineering Massachusetts Institute of
Technology, Massachusetts, 1995.
[9] CORRÊA, F., Aplicação de Metodologias Híbridas em Estudos Paramétricos sobre
o Comportamento de Sistemas Offshore, Dissertação de M.Sc., COPPE/UFRJ,
Programa de Engenharia Civil, Rio de Janeiro, RJ, Brasil, 2003.
[10] MENEZES, F.G.T.d., Acoplamento Hidrodinâmico e Estrutural de Sistemas
Flutuantes Multicorpos para Produção e Escoamento de Petróleo e Gás, Tese de
D.Sc., COPPE/UFRJ, Programa de Engenharia Civil, Rio de Janeiro, 2016.

80
[11] Chakrabarti, S.K, Handbook of Offshore Engineering 1ed. Plainfield, Illinois, USA,
2005.
[12] BELYTSCHKO, T., An Overview of Semidiscretization and Time Integration
Procedures, Computational Methods for Transient Analysis. eds Belytschko T,
Hughes TJR, 1-65, Amsterdam, Holanda, 1983.
[13] BATHE, K.J, Finite Element Procedures. New Jersey, Prentice-Hall, 1996.
[14] WADAM, Wave Analysis by Diffraction and Morison Theory. Versão 8.1, User
Manual, Det Norske Veritas, 2005.
[15] SIMO, Theory Manual. Versão 3.4, Marintek, 2004.
[16] FUCATU, C.H., Desenvolvimento de um Simulador Dinâmico para Análise de
Navios Amarrados, Dissertação de M.Sc., Escola Politécnica da USP, São Paulo, SP,
Brasil, 1998.
[17] ANFLEX - Análise Não Linear de Risers e Linhas de Ancoragem. Versão 3.0 -
Manual de Entrada de Dados, DIPREX/SEDEM/CENPES/PETROBRAS, 1996.
[18] RIFLEX, Theory Manual. Versão 3.4, Marintek, 2005.
[19] ORMBERG, H., FYLLING, I.J., LARSEN, K., et al., Coupled Analysis of Floater
and Mooring Dynamics for a Turret-Moored Ship. Applied Ocean Research 20, pp.
55-67, 1998
[20] ORMBERG, H., FYLLING, I.J., LARSEN, K., et al., Coupled Analysis of Vessel
Motions and Mooring and Riser System Dynamics. OMAE, v I-A, Offshore
Technology, pp. 91-100, 1997.
[21] JACOB, B.P., MASETTI, I.Q., Prosim - Coupled Numerical Simulation of the
Behavior of Moored Semisubmersible Units, COPPETEC-Petrobras Internal Report,
Rio de Janeiro, 1997.
[22] CRUZ, I., et al., “The Buoy Supporting Risers (BSR) System: Engineering a Solution
for Ultra-Deep Water Subsea Developments in Hash Environments”, Offshore
Technology Conference OTC-25865-MS, Houston, Texas, USA, Maio 2015.
[23] MANESCHY, R., et al.,“Steel Catenary Risers (SCRs): from design to installation
of the First Reel CRA Lined Pipes. Part II: Fabrication and Installation”, Offshore
Technology Conference OTC-25857-MS, Houston, Texas, USA, Maio 2015.

81
[24] GOUVEIA, J., et al., “Steel Catenary Risers (SCRs): from design to installation of
the First Reel CRA Lined Pipes. Part I: Risers Design”, Offshore Technology
Conference OTC-25839-MS, Houston, Texas, USA, Maio 2015.
[25] DIEMEN, J. G., et al., “Displacing 10,000t of Water to Install 2,500t of Steel Buoy
at 250m Below Sea Level”, Offshore Technology Conference OTC-25887-MS,
Houston, Texas, USA, Maio 2015.
[26] PACHECO, A.A., Numerical And Experimental Studies Regarding a Drilling
Platform to Install a Free Standing Hybrid Riser, Rio Oil & Gas 2018.

82
Anexo I

83

84

85
Anexo II
Esforços nos jumpers e nos risers
RC (m) RC (m)
Mínima Máxima Mínimo Mínima Máxima Mínimo
J01 - Umb 10.1 97.3 73.8 R01 - Umb 24.2 422.6 91.6
J02 - PO 54.1 400.9 68.6 R02 - PO 201.1 1457.3 278.5
J03 - GL 121.1 719.1 73.7 R03 - GL 251.4 1977.6 256.1
J04 - IG 112.8 758.2 68.7 R04 - IG 217.2 1907.0 225.9
J05 - UEM 27.8 186.4 73.3 R05 - UEM 137.9 1654.3 171.3
J06 - PO - 2 56.4 398.6 68.4 R06 - PO - 2 203.7 1374.1 302.6
J07 - IA 53.5 333.3 73.2 R07 - IA 212.1 1582.1 262.6
J08 - PO - 3 57.5 398.2 68.3 R08 - PO - 3 201.4 1335.1 302.6
J09 - Umb - 2 11.8 95.0 73.4 R09 - Umb - 2 28.2 371.9 101.7
J10 - PO - 4 58.5 397.8 68.2 R10 - PO - 4 193.0 1318.0 297.4
J11 - Umb - 3 12.2 94.7 73.3 R11 - Umb - 3 24.0 379.4 83.6
J12 - PO - 5 59.3 397.4 68.0 R12 - PO - 5 178.8 1334.1 269.7
J13 - IA - 2 55.8 331.8 72.8 R13 - IA - 2 181.9 1566.8 238.1
J14 - PO - 6 59.4 397.0 67.7 R14 - PO - 6 167.2 1349.7 261.7
J15 - UEM - 2 29.9 183.7 72.7 R15 - UEM - 2 101.2 1632.1 139.3
J16 - IG - 2 115.6 754.8 67.6 R16 - IG - 2 156.9 1859.1 169.6
J17 - GL - 4 124.0 714.8 72.5 R17 - GL - 4 186.3 1903.0 200.8
J18 - PO - 8 58.4 396.4 67.3 R18 - PO - 8 137.1 1387.4 210.8
J19 - Umb - 4 12.4 93.7 72.9 R19 - Umb - 4 -7.0 416.0 42.2
Nota 1: RC - raio de curvatura
Nota 2: Os carregamentos de onda e correnteza estão alinhados e indo para norte
Trações (kN)Linha Linha
Trações (kN)
Caso de Carregamento 1 - Norte

86
RC (m) RC (m)
Mínima Máxima Mínimo Mínima Máxima Mínimo
J01 - Umb 11.7 95.6 72.1 R01 - Umb 21.5 395.9 85.7
J02 - PO 59.4 406.1 71.0 R02 - PO 166.9 1381.0 243.6
J03 - GL 133.6 736.6 79.5 R03 - GL 216.6 1893.2 219.8
J04 - IG 123.3 771.7 73.0 R04 - IG 183.7 1836.9 201.8
J05 - UEM 30.1 188.4 75.1 R05 - UEM 110.6 1603.2 142.7
J06 - PO - 2 61.0 402.2 70.9 R06 - PO - 2 170.0 1318.7 260.7
J07 - IA 57.8 336.4 76.2 R07 - IA 176.8 1528.3 227.9
J08 - PO - 3 61.8 400.7 70.8 R08 - PO - 3 168.2 1289.2 258.7
J09 - Umb - 2 12.9 93.5 72.1 R09 - Umb - 2 19.9 357.4 79.3
J10 - PO - 4 62.4 399.1 70.7 R10 - PO - 4 164.0 1271.5 253.4
J11 - Umb - 3 13.0 93.3 72.1 R11 - Umb - 3 18.7 361.0 77.1
J12 - PO - 5 62.6 398.7 70.6 R12 - PO - 5 157.4 1284.4 240.1
J13 - IA - 2 59.2 333.9 76.0 R13 - IA - 2 160.2 1516.3 207.1
J14 - PO - 6 62.5 398.7 70.6 R14 - PO - 6 147.7 1301.1 228.1
J15 - UEM - 2 31.2 185.5 74.8 R15 - UEM - 2 89.4 1584.7 118.8
J16 - IG - 2 124.1 762.2 72.1 R16 - IG - 2 148.3 1799.2 164.5
J17 - GL - 4 134.4 723.3 78.2 R17 - GL - 4 169.7 1850.1 174.1
J18 - PO - 8 61.7 398.8 70.4 R18 - PO - 8 130.0 1336.1 194.9
J19 - Umb - 4 12.7 93.4 71.1 R19 - Umb - 4 3.4 389.9 46.4
Nota 1: RC - raio de curvatura
Nota 2: Os carregamentos de onda e correnteza estão alinhados e indo para nordeste
Trações (kN)Linha Linha
Trações (kN)
Caso de Carregamento 2 - Nordeste

87
RC (m) RC (m)
Mínima Máxima Mínimo Mínima Máxima Mínimo
J01 - Umb 11.4 100.7 68.5 R01 - Umb 18.7 353.5 75.2
J02 - PO 59.6 437.3 71.0 R02 - PO 158.7 1262.7 239.2
J03 - GL 137.1 777.1 80.9 R03 - GL 198.6 1766.0 211.1
J04 - IG 125.2 818.4 74.0 R04 - IG 167.1 1733.2 178.0
J05 - UEM 29.0 200.7 74.6 R05 - UEM 98.5 1533.9 122.7
J06 - PO - 2 59.5 437.4 70.9 R06 - PO - 2 155.8 1260.6 236.2
J07 - IA 55.7 366.6 76.2 R07 - IA 162.6 1481.0 204.9
J08 - PO - 3 59.4 437.5 70.9 R08 - PO - 3 155.1 1260.1 235.0
J09 - Umb - 2 11.3 100.8 68.3 R09 - Umb - 2 17.1 352.5 62.5
J10 - PO - 4 59.4 437.5 70.8 R10 - PO - 4 154.9 1259.9 234.6
J11 - Umb - 3 11.2 100.8 68.3 R11 - Umb - 3 17.1 352.3 62.4
J12 - PO - 5 59.3 437.6 70.8 R12 - PO - 5 155.1 1260.1 235.0
J13 - IA - 2 55.5 366.8 76.1 R13 - IA - 2 162.6 1481.0 204.9
J14 - PO - 6 59.3 437.7 70.8 R14 - PO - 6 155.9 1260.7 236.3
J15 - UEM - 2 28.8 200.8 74.5 R15 - UEM - 2 98.5 1533.8 122.7
J16 - IG - 2 124.8 819.1 73.9 R16 - IG - 2 167.2 1733.1 178.1
J17 - GL - 4 136.6 777.9 80.8 R17 - GL - 4 198.6 1765.9 211.1
J18 - PO - 8 59.2 437.9 70.8 R18 - PO - 8 158.7 1262.9 239.3
J19 - Umb - 4 11.2 100.9 68.4 R19 - Umb - 4 18.7 353.5 75.3
Nota 1: RC - raio de curvatura
Nota 2: Os carregamentos de onda e correnteza estão alinhados e indo para leste
Trações (kN)Linha Linha
Trações (kN)
Caso de Carregamento 3 - Leste

88
RC (m) RC (m)
Mínima Máxima Mínimo Mínima Máxima Mínimo
J01 - Umb 12.9 93.0 71.2 R01 - Umb 79.2 389.4 493.1
J02 - PO 62.2 397.8 70.3 R02 - PO 158.7 1262.7 239.2
J03 - GL 134.3 717.8 78.2 R03 - GL 198.6 1766.0 211.1
J04 - IG 123.8 755.5 72.1 R04 - IG 149.0 1799.2 165.9
J05 - UEM 31.3 184.3 74.8 R05 - UEM 89.4 1584.4 118.8
J06 - PO - 2 62.4 397.2 70.5 R06 - PO - 2 147.5 1300.8 228.1
J07 - IA 59.0 333.4 75.9 R07 - IA 160.1 1516.0 207.1
J08 - PO - 3 62.4 399.0 70.6 R08 - PO - 3 157.4 1284.2 238.3
J09 - Umb - 2 13.3 93.2 72.1 R09 - Umb - 2 18.7 361.1 77.5
J10 - PO - 4 62.4 400.7 70.6 R10 - PO - 4 163.9 1271.5 253.4
J11 - Umb - 3 13.1 93.7 72.1 R11 - Umb - 3 19.9 357.4 79.4
J12 - PO - 5 62.2 402.6 70.7 R12 - PO - 5 168.3 1289.2 258.7
J13 - IA - 2 58.4 338.6 76.2 R13 - IA - 2 176.9 1528.2 227.9
J14 - PO - 6 61.6 405.1 70.8 R14 - PO - 6 170.2 1318.6 260.8
J15 - UEM - 2 30.5 188.5 75.0 R15 - UEM - 2 110.7 1603.0 142.7
J16 - IG - 2 123.8 773.7 72.9 R16 - IG - 2 183.9 1836.8 201.9
J17 - GL - 4 134.4 735.6 79.4 R17 - GL - 4 217.1 1891.5 219.9
J18 - PO - 8 60.0 410.1 70.9 R18 - PO - 8 165.7 1381.0 243.1
J19 - Umb - 4 11.9 95.8 72.1 R19 - Umb - 4 21.5 395.9 85.7
Nota 1: RC - raio de curvatura
Nota 2: Os carregamentos de onda e correnteza estão alinhados e indo para sudeste
Trações (kN)Linha Linha
Trações (kN)
Caso de Carregamento 4 - Sudeste

89
RC (m) RC (m)
Mínima Máxima Mínimo Mínima Máxima Mínimo
J01 - Umb 12.3 93.7 72.9 R01 - Umb -7.4 417.0 41.5
J02 - PO 58.7 393.4 67.3 R02 - PO 166.9 1381.0 243.6
J03 - GL 124.4 709.1 72.5 R03 - GL 216.6 1893.2 219.8
J04 - IG 115.9 749.1 67.6 R04 - IG 153.0 1865.3 168.3
J05 - UEM 29.7 183.4 72.7 R05 - UEM 101.2 1631.6 139.3
J06 - PO - 2 59.3 393.8 67.8 R06 - PO - 2 167.3 1349.9 261.7
J07 - IA 55.6 329.4 72.8 R07 - IA 182.0 1567.2 238.1
J08 - PO - 3 58.9 394.6 68.0 R08 - PO - 3 179.6 1331.8 269.9
J09 - Umb - 2 11.9 94.2 73.3 R09 - Umb - 2 23.9 379.5 85.0
J10 - PO - 4 58.2 395.5 68.2 R10 - PO - 4 193.0 1318.0 297.4
J11 - Umb - 3 11.5 94.4 73.4 R11 - Umb - 3 28.3 371.8 101.4
J12 - PO - 5 57.4 396.3 68.4 R12 - PO - 5 201.4 1334.8 302.7
J13 - IA - 2 53.3 332.6 73.2 R13 - IA - 2 212.0 1581.9 262.6
J14 - PO - 6 56.3 397.4 68.4 R14 - PO - 6 203.6 1373.8 302.6
J15 - UEM - 2 27.4 186.0 73.3 R15 - UEM - 2 138.0 1654.3 171.5
J16 - IG - 2 112.3 756.9 68.7 R16 - IG - 2 218.2 1906.8 225.5
J17 - GL - 4 120.5 719.2 73.7 R17 - GL - 4 250.5 1977.4 255.0
J18 - PO - 8 53.9 400.6 68.6 R18 - PO - 8 201.0 1457.2 278.4
J19 - Umb - 4 9.7 96.7 73.8 R19 - Umb - 4 23.1 424.9 88.4
Nota 1: RC - raio de curvatura
Nota 2: Os carregamentos de onda e correnteza estão alinhados e indo para sul
Trações (kN)Linha Linha
Trações (kN)
Caso de Carregamento 5 - Sul

90
RC (m) RC (m)
Mínima Máxima Mínimo Mínima Máxima Mínimo
J01 - Umb 12.9 94.9 73.5 R01 - Umb 22.3 408.4 77.4
J02 - PO 53.1 402.6 62.5 R02 - PO 166.9 1381.0 243.6
J03 - GL 108.1 720.1 64.3 R03 - GL 216.6 1893.2 219.8
J04 - IG 101.9 762.5 60.1 R04 - IG 204.8 1874.2 213.9
J05 - UEM 28.2 187.7 69.3 R05 - UEM 131.8 1647.9 163.2
J06 - PO - 2 54.5 404.6 63.0 R06 - PO - 2 208.6 1373.6 311.7
J07 - IA 51.5 339.3 68.0 R07 - IA 221.7 1594.6 274.8
J08 - PO - 3 54.5 405.7 63.1 R08 - PO - 3 215.9 1360.2 321.4
J09 - Umb - 2 13.4 96.0 74.1 R09 - Umb - 2 32.5 384.0 114.6
J10 - PO - 4 54.3 406.8 63.2 R10 - PO - 4 222.0 1346.5 328.0
J11 - Umb - 3 13.2 96.6 74.1 R11 - Umb - 3 33.3 379.3 131.6
J12 - PO - 5 53.6 408.0 63.3 R12 - PO - 5 224.1 1364.6 326.4
J13 - IA - 2 50.3 342.6 68.4 R13 - IA - 2 233.6 1609.0 285.8
J14 - PO - 6 52.7 409.1 63.4 R14 - PO - 6 224.9 1396.0 328.5
J15 - UEM - 2 26.9 191.5 70.0 R15 - UEM - 2 153.7 1667.5 186.6
J16 - IG - 2 100.3 774.0 61.1 R16 - IG - 2 240.1 1919.2 255.3
J17 - GL - 4 106.6 733.7 65.8 R17 - GL - 4 278.1 1984.2 271.9
J18 - PO - 8 50.3 411.8 63.8 R18 - PO - 8 224.8 1459.1 304.2
J19 - Umb - 4 11.2 99.3 74.2 R19 - Umb - 4 31.6 419.0 110.7
Nota 1: RC - raio de curvatura
Nota 2: Os carregamentos de onda e correnteza estão alinhados e indo para sudoeste
Trações (kN)Linha Linha
Trações (kN)
Caso de Carregamento 6 - Sudoeste
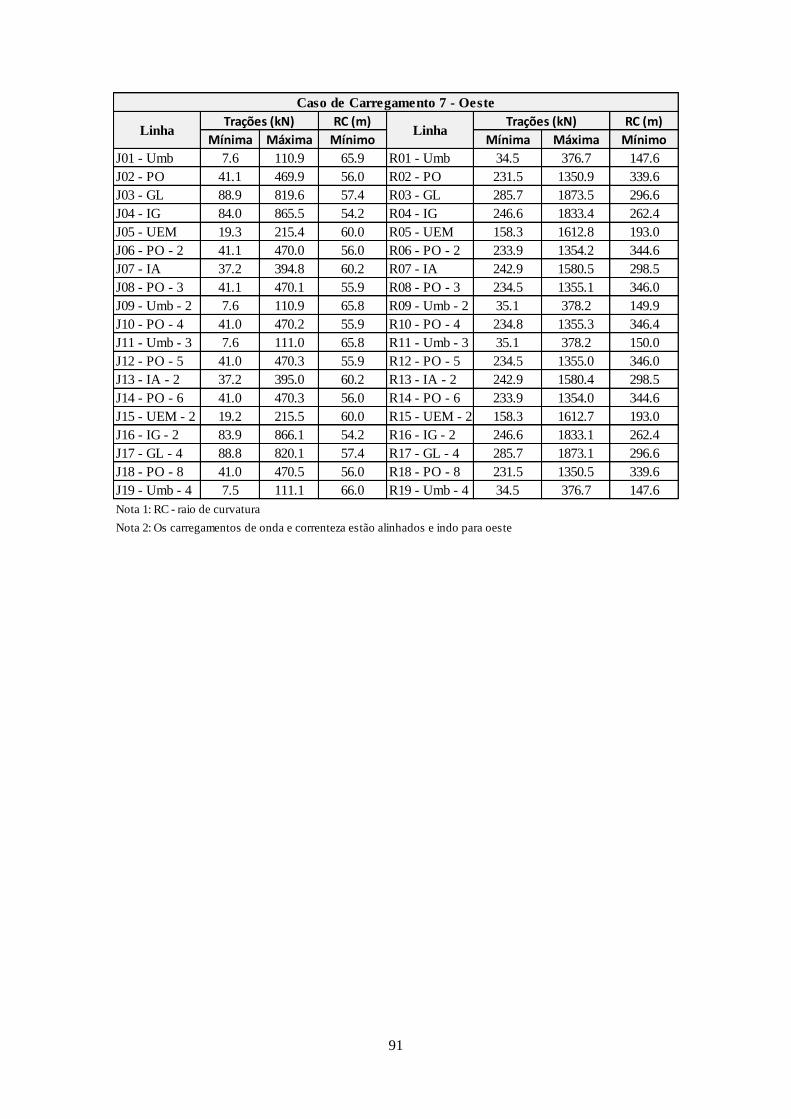
91
RC (m) RC (m)
Mínima Máxima Mínimo Mínima Máxima Mínimo
J01 - Umb 7.6 110.9 65.9 R01 - Umb 34.5 376.7 147.6
J02 - PO 41.1 469.9 56.0 R02 - PO 231.5 1350.9 339.6
J03 - GL 88.9 819.6 57.4 R03 - GL 285.7 1873.5 296.6
J04 - IG 84.0 865.5 54.2 R04 - IG 246.6 1833.4 262.4
J05 - UEM 19.3 215.4 60.0 R05 - UEM 158.3 1612.8 193.0
J06 - PO - 2 41.1 470.0 56.0 R06 - PO - 2 233.9 1354.2 344.6
J07 - IA 37.2 394.8 60.2 R07 - IA 242.9 1580.5 298.5
J08 - PO - 3 41.1 470.1 55.9 R08 - PO - 3 234.5 1355.1 346.0
J09 - Umb - 2 7.6 110.9 65.8 R09 - Umb - 2 35.1 378.2 149.9
J10 - PO - 4 41.0 470.2 55.9 R10 - PO - 4 234.8 1355.3 346.4
J11 - Umb - 3 7.6 111.0 65.8 R11 - Umb - 3 35.1 378.2 150.0
J12 - PO - 5 41.0 470.3 55.9 R12 - PO - 5 234.5 1355.0 346.0
J13 - IA - 2 37.2 395.0 60.2 R13 - IA - 2 242.9 1580.4 298.5
J14 - PO - 6 41.0 470.3 56.0 R14 - PO - 6 233.9 1354.0 344.6
J15 - UEM - 2 19.2 215.5 60.0 R15 - UEM - 2 158.3 1612.7 193.0
J16 - IG - 2 83.9 866.1 54.2 R16 - IG - 2 246.6 1833.1 262.4
J17 - GL - 4 88.8 820.1 57.4 R17 - GL - 4 285.7 1873.1 296.6
J18 - PO - 8 41.0 470.5 56.0 R18 - PO - 8 231.5 1350.5 339.6
J19 - Umb - 4 7.5 111.1 66.0 R19 - Umb - 4 34.5 376.7 147.6
Nota 1: RC - raio de curvatura
Nota 2: Os carregamentos de onda e correnteza estão alinhados e indo para oeste
Trações (kN)Linha Linha
Trações (kN)
Caso de Carregamento 7 - Oeste

92
RC (m) RC (m)
Mínima Máxima Mínimo Mínima Máxima Mínimo
J01 - Umb 10.9 100.6 74.1 R01 - Umb 32.4 419.1 112.1
J02 - PO 49.4 419.3 63.8 R02 - PO 224.9 1458.7 302.6
J03 - GL 105.4 739.5 65.7 R03 - GL 278.3 1984.3 273.3
J04 - IG 99.6 779.2 61.1 R04 - IG 240.1 1919.4 255.3
J05 - UEM 26.5 193.1 70.1 R05 - UEM 153.7 1667.7 186.7
J06 - PO - 2 52.1 413.6 63.4 R06 - PO - 2 224.9 1396.2 328.6
J07 - IA 49.7 345.2 68.4 R07 - IA 233.6 1609.3 285.9
J08 - PO - 3 13.0 98.1 74.0 R08 - PO - 3 224.1 1364.8 326.5
J09 - Umb - 2 7.6 110.9 65.8 R09 - Umb - 2 33.3 379.3 131.6
J10 - PO - 4 53.7 410.2 63.2 R10 - PO - 4 221.9 1346.3 328.0
J11 - Umb - 3 13.3 97.5 74.0 R11 - Umb - 3 32.0 383.9 110.7
J12 - PO - 5 54.0 408.9 63.0 R12 - PO - 5 215.9 1359.9 321.4
J13 - IA - 2 50.9 340.5 68.0 R13 - IA - 2 221.9 1594.2 275.5
J14 - PO - 6 54.0 407.6 62.9 R14 - PO - 6 208.6 1373.2 311.7
J15 - UEM - 2 27.9 188.6 69.3 R15 - UEM - 2 132.7 1648.1 163.4
J16 - IG - 2 99.5 766.5 60.1 R16 - IG - 2 205.5 1873.2 213.1
J17 - GL - 4 105.8 722.7 64.3 R17 - GL - 4 239.5 1918.2 254.0
J18 - PO - 8 52.6 405.0 62.4 R18 - PO - 8 181.3 1399.1 254.2
J19 - Umb - 4 12.8 95.5 73.6 R19 - Umb - 4 21.4 408.1 86.2
Nota 1: RC - raio de curvatura
Nota 2: Os carregamentos de onda e correnteza estão alinhados e indo para noroeste
Trações (kN)Linha Linha
Trações (kN)
Caso de Carregamento 8 - Noroeste





























