Embed Size (px)
Citation preview

T H E A R C H I V E O F M E C H A N I C A L E N G I N E E R I N G
VOL. LVIII 2011 Number 2
10.2478/v10180-011-0016-4Key words: multibody dynamics, hydraulic dynamics, augmented Lagrangian formulation, efficient simulation,hydraulic cylinders, heavy machinery
MIGUEL A. NAYA ∗, JAVIER CUADRADO ∗, DANIEL DOPICO ∗, URBANO LUGRIS ∗
AN EFFICIENT UNIFIED METHOD FOR THE COMBINEDSIMULATION OF MULTIBODY AND HYDRAULIC DYNAMICS:
COMPARISON WITH SIMPLIFIED AND CO-INTEGRATIONAPPROACHES
A formulation developed at the Laboratory of Mechanical Engineering allowsrobust and efficient simulation of large and complex multibody systems. Simulatorsof cars, excavators and other systems have been developed showing that real-timesimulations are possible even when facing demanding manoeuvres.
Hydraulic actuators are present in many industrial applications of multibodysystems, like in the case of the heavy machinery field. When simulating the dynamicsof this kind of problems that combine multibody dynamics and hydraulics, twodifferent approaches are common: to resort to kinematically guide the variable lengthof the actuator, thus avoiding the need to consider the dynamics of the hydraulicsystem; or to perform a multi-rate integration of both subsystems if a more detaileddescription of the problem is required, for example, when the objective of the studyis to optimize the pump control.
This work addresses the inclusion of hydraulic actuators dynamics in the above-mentioned self-developed multibody formulation, thus leading to a unified approach.An academic example serves to compare the efficiency, accuracy and ease of imple-mentation of the simplified (kinematic guidance), multi-rate and unified approaches.Such a comparison is the main contribution of the paper, as it may serve to provideguidelines on which approach to select depending on the problem characteristics.
1. Introduction
Several years ago, the authors proposed a method for the efficient sim-ulation of the dynamics of multibody systems [1]: the modeling of the sys-tem was carried out in natural or fully-Cartesian coordinates, the equationsof motion were stated as an index-3 augmented Lagrangian formulation,
∗ Laboratory of Mechanical Engineering, University of La Coruna, Ferrol, 15403, Spain;e-mail: minaya@cdfudces

224 MIGUEL A. NAYA, JAVIER CUADRADO, DANIEL DOPICO, URBANO LUGRIS
the numerical integration was performed through Newmark-type algorithms,and the resulting velocities and accelerations were projected into their cor-responding constraint manifolds. The formalism showed to be robust andefficient: it worked properly in mechanisms with singular configurations orchanging topologies, and provided successful results for large and complexindustrial problems, like the detailed models of cars and excavators, allowingintegration time steps as large as 10 ms. Some years later, the method wasextended [2] so as to consider the modeling in joint coordinates (dependentand relative coordinates), taking advantage of the recursive kinematics anddynamics allowed for such an approach, which led to a method with improvedefficiency for large systems.
Fig. 1. Diagram of a hydraulic cylinder and valve
Hydraulic actuators play a relevant role in many industrial fields, likefor example in most heavy machinery systems [3, 4]. The dynamics of suchdevices are usually modeled in terms of the orifice equations, volumes andpressure areas, as depicted in Fig. 1. Pressure rates for the volumes on bothsides of the cylinder piston are derived from fluid continuity and compress-ibility considerations [5] as
pA =βA
VA
(−VA + QPA + QTA + QBA
)(1)
pB =βB
VB
(−VB + QPB + QTB + QBA
)(2)
where VA and VB are the volumes at each side of the cylinder and VA, VB aretheir speeds of variation. QPA, QPB represent the flow incoming to chamber

AN EFFICIENT UNIFIED METHOD FOR THE COMBINED SIMULATION OF MULTIBODY. . . 225
A or B from the pump, QTA, QTB are the flows to the tank from chamberA or B, while QBA constitutes the leakage flow and is commonly neglected.The bulk modulus at each side of the cylinder, βi, is obtained as a functionof the pressures as
βi =1 + api + bp2
i
a + 2bpi(3)
with aand b being known constants for the fluid. The flow across each orificearea, Aor f , in a hydraulic valve is given by
Q = Aor fCd
√2 (pin − pout)
ρsign (pin − pout) (4)
where pin and pout are the pressures at both sides of the orifice and Cd isthe flow discharge coefficient for a sharp orifice opening area.
In the valve, there are four orifice areas which are a nonlinear function ofthe spool displacement, κ, corresponding to APA (κ), ATA (κ), APB (κ), ATB (κ).The displacement of the spool includes some dead zones to minimize leak-age [6]. The variation of the pressure provided by the pump is a nonlinearfunction of the speed, the flow, the leakages and the geometry of the pump,but this is not taken into account in this work.
A common simplified technique to include the behavior of hydraulicactuators within simulations of multibody dynamics consists of kinemati-cally guiding the variable length corresponding to the distance between theends of the hydraulic actuator [7]. The guidance law, which provides theactuator length as function of the driving inputs (provided, for instance, bythe machine operator), may be just a linear mapping, or may account forforce or speed limitations and other characteristics of the real power system.
However, for some applications, e.g. when optimization of the pumpcontrol is sought, a more detailed modeling is required, and the dynamics ofhydraulic actuators should be taken into account. Some attempts have beenpresented in the literature in this direction [8, 9]. From the integration pointof view, two different approaches have been followed, namely, the unifiedapproach, and the co-integration.
The first one combines the hydraulic and multibody equations, thus yield-ing a single system [10, 11] that is then integrated in time.
In the second approach, one problem leads the solution process and,usually, its integration time-step size is larger. Therefore, both problems areintegrated separately, but information is exchanged between them at everyintegration time step of the main process. This is known as multi-rate in-tegration, and can be carried out by either employing a different softwarefor each problem (co-simulation) [9, 12] or a single environment where both

226 MIGUEL A. NAYA, JAVIER CUADRADO, DANIEL DOPICO, URBANO LUGRIS
problems are integrated separately (co-integration) [13,14]. Hydraulic devicesare easily modeled by a few first-order nonlinear differential equations, butit is a numerically stiff set of equations due to the high “stiffness” of thehydraulic fluid, which is characterized by a bulk modulus that may raise to700 MPa. This problem may be overcome by using a very small time-stepsize for the integration that ranges, typically between 10−6 s and 10−4 s [15].Consequently, the multibody integration leads the process, and the hydraulicproblem is solved with a smaller time-step size.
In this work, the first approach from those that take the hydraulic dy-namics into account is addressed: both hydraulic and multibody dynamicequations are combined within the formalism mentioned at the beginning ofthe Section in a unified approach. The efficiency of this scheme is tested bycomparison with the kinematic guidance of hydraulic actuators. The accuracyof the solution is contrasted with that of a co-integration scheme. The com-parison of the three approaches may be considered as the main contributionof the paper, as it aims to provide guidelines that help to find out which isthe most suitable approach depending on the problem characteristics.
The organization of the paper is as follows: the original method formultibody dynamics is briefly exposed in Section 2; the inclusion of thehydraulic dynamic equations is addressed in Section 3, and the resultingformalism is obtained; an academic example aimed to test the behavior ofthe proposed scheme is presented in Section 4, while in Section 5 the resultscoming from the simulation of the example are discussed and compared withthose of the other approaches mentioned above; finally, the conclusions aresummarized in Section 6.
2. The original multibody method
The original method for the dynamics of multibody systems is describedin [1], but a brief overview is presented in this Section. The modeling iscarried out in dependent fully-Cartesian coordinates, also known as naturalcoordinates. Further explanation about these coordinates and the constraintsthey lead to can be found in [16].
The equations of motion of the whole multibody system are given by anindex-3 augmented Lagrangian formulation in the form
Mq + ΦTqαΦ + ΦT
qλ∗ = Q (5)
where M is the mass matrix, q the accelerations vector, Φq the Jacobianmatrix of the constraint equations, α the penalty factor, Φ the constraintsvector, λ∗ the Lagrange multipliers and Q the vector of applied and velocitydependent inertia forces. The Lagrange multipliers are obtained from the

AN EFFICIENT UNIFIED METHOD FOR THE COMBINED SIMULATION OF MULTIBODY. . . 227
following iteration process (given by sub-index i, while sub-index n standsfor the time step),
λ∗i+1 = λ∗i + αΦi+1 i = 0, 1, 2, ... (6)
where the value of λ∗o is taken equal to the λ∗ obtained in the previous timestep.
As integration scheme, the implicit single-step trapezoidal rule is adopt-ed. The corresponding difference equations in velocities and accelerationsare:
qn+1 =2∆t
qn+1 + ˆqn
qn+1 =4
∆t2qn+1 + ˆqn
(7)
with,
ˆqn = −(
2∆t
qn + qn
)
ˆqn = −(
4∆t2
qn +4∆t
qn + qn
) (8)
Dynamic equilibrium can be established at time step n+1 by introducing thedifference equations (6) and (7) into the equations of motion (4), leading to
4∆t2
Mqn+1 + ΦTqn+1 (αΦn+1 + λn+1) −Qn+1 + Mˆqn = 0 (9)
For numerical reasons, the scaling of Eq. (8) by a factor of ∆t2/4 seems tobe advisable, thus yielding
Mqn+1 +∆t2
4ΦT
qn+1 (αΦn+1 + λn+1) − ∆t2
4Qn+1 +
∆t2
4Mˆqn = 0 (10)
or, symbolically f (qn+1) = 0.In order to obtain the solution of this nonlinear system, the widely used
iterative Newton-Raphson method is applied[∂f (q)∂q
]
i∆qi+1 = − [
f (q)]i (11)
being the residual vector,
[f (q)
]=
∆t2
4
(Mq + ΦT
qαΦ + ΦTqλ∗ −Q
)(12)

228 MIGUEL A. NAYA, JAVIER CUADRADO, DANIEL DOPICO, URBANO LUGRIS
and the approximated tangent matrix,[∂f (q)∂q
]= M +
∆t2
C +∆t2
4
(ΦT
qαΦq + K)
(13)
where C and K represent the contribution of damping and elastic forces ofthe system provided they exist.
The procedure explained above yields a set of positions qn+1 that not onlysatisfies the equations of motion (5), but also the constraint conditions Φ = 0.However, it is not expected that the corresponding sets of velocities and ac-celerations satisfy Φ = 0 and Φ = 0, because these conditions have not beenimposed in the solution process. To overcome this difficulty, velocities andaccelerations are projected into their corresponding constraint manifolds. Theprojection leading matrix is the same tangent matrix of Eq. (13). Therefore,triangularization is avoided and projections in velocities and accelerationsare carried out with just forward reductions and back substitutions.
If q∗ and q∗ are the velocities and accelerations obtained after conver-gence has been achieved within the Newton-Raphson iteration, their projectedcounterparts q and q are calculated from
[W +
∆t2
4ΦT
qαΦq
]q = Wq∗ − ∆t2
4ΦT
qαΦt (14)
for the velocities, and[W +
∆t2
4ΦT
qαΦq
]q = Wq∗ − ∆t2
4ΦT
qα(Φqq + Φt
)(15)
for the accelerations, being,
W = M +∆t2
C +∆t2
4K (16)
3. The proposed method for multibody and hydraulic dynamics
The method described in the previous Section is extended to also con-sider the hydraulic dynamic equations. The index-3 augmented Lagrangianformulation is incremented with the pressure variation equations, leading tothe following combined system of equations:
Mq + ΦTqαΦ + ΦT
qλ∗ = Q(q, q,p)
p = h (p, q, q)(17)

AN EFFICIENT UNIFIED METHOD FOR THE COMBINED SIMULATION OF MULTIBODY. . . 229
where vector p contains the pressures of the chambers (two for each hy-draulic cylinder). The dependency of both the applied forces vector Q andthe function h with respect to positions q, velocities q and pressures p isconsidered to be known. The Lagrange multipliers are obtained from thesame iteration process already described in the previous Section.
Again, the implicit single-step trapezoidal rule is adopted as integrationscheme. The corresponding difference equations in velocities, accelerationsand pressure derivatives are,
qn+1 =2∆t
qn+1 + ˆqn
qn+1 =4
∆t2qn+1 + ˆqn
pn+1 =2∆t
pn+1 + ˆpn
(18)
being,ˆqn = −
(2∆t
qn + qn
)
ˆqn = −(
4∆t2
qn +4∆t
qn + qn
)
ˆpn = −(
2∆t
pn + pn
)(19)
that is, the pressure derivatives use the same integration scheme as do thevelocities.
If dynamic equilibrium is established at time step n+1 by introducing thedifference equations (18-19) into the differential equations (17), the followingresult is obtained,
4∆t2
Mqn+1 + ΦTqn+1 (αΦn+1 + λn+1) −Qn+1 + Mˆqn = 0 (20)
2∆t
pn+1 − hn+1 + ˆpn = 0 (21)
The scaling of Eq. (20-21) by a factor of ∆t2/4 is now performed, as it wasdone in the previous Section for the multibody problem, thus yielding
Mqn+1 +∆t2
4ΦT
qn+1 (αΦn+1 + λn+1) − ∆t2
4Qn+1 +
∆t2
4Mˆqn = 0 (22)
∆t2
pn+1 − ∆t2
4hn+1 +
∆t2
4ˆpn = 0 (23)
or, symbolically f (xn+1) = 0, with xT ={
qT pT}.

230 MIGUEL A. NAYA, JAVIER CUADRADO, DANIEL DOPICO, URBANO LUGRIS
In order to obtain the solution of this nonlinear system, the iterativeNewton-Raphson method is used,
[∂f (x)∂x
]
i∆xi+1 = − [f (x)]i (24)
with the residual vector,
[f (x)] =∆t2
4
Mq + ΦT
qαΦ + ΦTqλ∗ −Q
p − h
(25)
and the approximated tangent matrix[∂f (x)∂x
],
M +∆t2
C +∆t2
4
(ΦT
qαΦq + K)
−∆t2
4∂Q∂p
−∆t2
(∆t2∂h∂q
+∂h∂q
)∆t2
(Inp − ∆t
2∂h∂p
)
(26)
Here np is the number of elements in the vector of pressures p, and Inpis the identity matrix of such a dimension. It must be pointed out that thetangent matrix is not symmetric any more, as it was when dealing with themultibody problem alone. This fact will negatively affect the efficiency, sincespecific solvers for symmetric matrices are faster.
Once the Newton-Raphson iteration process converges, the resulting ve-locities and accelerations should be projected into their respective constraintmanifolds in order to achieve constraint satisfaction at velocity and accelera-tion levels. The projection equations are exactly the same as those presentedin Eq. (14-15).
4. The example
The example to test this approach is shown in Fig. 2. The solution ob-tained using the proposed formulation is compared against those obtainedthrough other approaches. Comparison with the approach consisting of kine-matically guiding the actuator will make it possible to assess the loss inefficiency incurred by the unified approach. Comparison with a co-integrationscheme will allow appraising the accuracy achieved by the unified approach.
The rod, with length L=1 m and mass m=200 kg uniformly distributed,is pinned to the ground at one of its ends in A, and has attached a point massof M=250 kg at the other end. The system is subject to gravity. A hydraulicactuator is pinned to the center point of the rod at one end, and to the ground

AN EFFICIENT UNIFIED METHOD FOR THE COMBINED SIMULATION OF MULTIBODY. . . 231
Fig. 2. The mechanism employed in the example
at the other end in B. The piston area is A=0.0065 m2, and the total cylinderlength is l=0.442 m. Friction in the actuator has been considered through alinear viscous model, with coefficient c=105 Ns/m. Coordinates of the fixedpoints are A(0,0) and B(
√3/2,0). Initially, the system is at rest, the angle
between the rod and the ground is 30o, and the two cylinder chambers havethe same volume.
The multibody system is modeled with the five variables grouped intovector q, while the hydraulic actuator is modeled with the two pressures ofvector p,
qT ={
x1 y1 x2 y2 s}
pT ={
p1 p2
} (27)
where x1, y1 are the Cartesian coordinates of point 1, located in the middleof the rod, x2, y2 are the Cartesian coordinates of point 2, coincident withthe point mass rigidly attached to the end of the rod, s is the variable lengthof the hydraulic actuator, and p1, p2 are the pressures in the upper and lowerchamber of the cylinder, respectively. The meaning of all these variables isalso illustrated in Fig. 2.
According to the described data, the term of the applied forces vector Qof Eq. (17) due to the hydraulic actuator is,
Q (5) = (p2 − p1) A − cs (28)

232 MIGUEL A. NAYA, JAVIER CUADRADO, DANIEL DOPICO, URBANO LUGRIS
Regarding the second set of equations in Eq. (17), i.e. the pressure equa-tions, they are stated as follows,
p1 = h1 =β1
Al1
As + Aicd
√2 (pP − p1)
ρδP − Aocd
√2 (p1 − pT )
ρδT
p2 = h2 =β2
Al2
−As + Aocd
√2 (pP − p2)
ρδP − Aicd
√2 (p2 − pT )
ρδT
(29)
where βi is calculated according to Eq. (3), l1 and l2 are the variable lengthsof the upper and lower chamber, respectively, Ai and Ao are the variablevalve areas connecting the cylinder chambers to the pump and to the tank,respectively, cd=0.67 is the valve discharge coefficient, ρ=850 kg/m3 is thefluid density, pP=7.6 MPa and pT=0.1 MPa are the pump and tank pressures,respectively (considered constant in this example), and, finally, δP and δT are0 in case the quantity inside the square root is negative, and 1 otherwise.
Given that the two cylinder chambers have equal volume at initial time,the variable lengths of the upper and lower chamber are obtained as,
l1 = 0.5l + so − sl2 = 0.5l + s − so
(30)
with so=0.5 m the initial length of the actuator.The variable valve areas Ai and Ao take, for each time instant, the fol-
lowing values,Ai = 0.0005κ
Ao = 0.0005 (1 − κ) (31)
where κ is the spool displacement or valve control parameter, i.e. the inputwhich controls the system motion.
The initial values of the problem variables are set so that the systemis in static equilibrium. This serves to avoid instabilities in the integrationprocess. The values of the position variables, q, are easily obtained from theinitial configuration of the system described above. The initial velocities, q,are set to zero, since the system is at rest. The initial values of the pressures,p, are calculated as the solution of a nonlinear system formed by the threefollowing equations:
(2M + m) g = (p2 − p1) Ah1 = 0h2 = 0
(32)

AN EFFICIENT UNIFIED METHOD FOR THE COMBINED SIMULATION OF MULTIBODY. . . 233
where g=9.81 m/s2 is the value of gravity. The solution of the nonlinearsystem of Eq. (32) yields the initial values of the pressures p1 and p2 andthe initial value of the spool displacement κ, so that static equilibrium isguaranteed.
In order to build the combined dynamic equations provided in Eq. (17),some additional terms are required.
The mass matrix is,
M =
0 0 0 0 00 0 0 0 0
0 0 M +m3
0 0
0 0 0 M +m3
0
0 0 0 0 0
(33)
The inertia of the rod has been distributed between point A (fixed) and point2, so that no inertia has been assigned to point 1, thus yielding the null firstand second rows and columns of the mass matrix.
The applied forces are,
Q =
0−mg
0−Mg
(p2 − p1) A − cs
(34)
and the constraints vector is,
Φ =
(x1 − xA)2 + (y1 − yA)2 − (0.5L)2
(x2 − xA) − 2 (x1 − xA)(y2 − yA) − 2 (y1 − yA)
(x1 − xB)2 + (y1 − yB)2 − s2
(35)
where the first equation imposes the constant length of segment A1, thesecond and third equations indicate that vector A2 is proportional to vectorA1, and the fourth equation relates the variable actuator distance s with theCartesian coordinates of points 1 and B.
Finally, in order to build the approximate tangent matrix of Eq. (26),the following terms are also required. The stiffness matrix K is null in thisexample, while the damping matrix C has only one non-zero element due tothe viscous damping at the actuator, C(5,5)=c. Moreover,

234 MIGUEL A. NAYA, JAVIER CUADRADO, DANIEL DOPICO, URBANO LUGRIS
∂Q∂p
= A
0 00 00 00 0−1 1
∂h∂q
=
0 0 0 0
h1
l10 0 0 0 −h2
l2
∂h∂q
=
0 0 0 0
β
l10 0 0 0 − β
l2
∂h∂p
= − βcd
A√
2ρ
D 00 E
(36)
where D and E are obtained as,
D =1l1
(Ai√
pP − p1δP +
Ao√p1 − pT
δT
)
E =1l2
(Ao√
pP − p2δP +
Ai√p2 − pT
δT
) (37)
A 10-seconds analysis is defined as the case-study: starting from rest initialconditions, the spool displacement κ is varied according to the followinglaw:
κ =
κo t 6 2κo − 0.01 2 < t 6 6κo + 0.01 6 < t 6 10
(38)
where κo is the initial value of the control parameter, which provides staticequilibrium conditions, as explained before. The areas of the orifices dependon the displacement of the spool according to Eq. (31).
Chronologically, the proposed unified scheme was first run and the his-tories of the cylinder length s and its first and second time-derivatives werestored during the simulation.
In the second simulation executed, a program which implements the sim-plified approach (kinematic guidance of the actuator) was run. The histories

AN EFFICIENT UNIFIED METHOD FOR THE COMBINED SIMULATION OF MULTIBODY. . . 235
of the cylinder length and its derivatives, stored in the previous simulation,were recovered and used to kinematically guide the coordinate s of the multi-body problem, so that the same motion of the system was ensured. It mustbe pointed out that this second simulation is not a kinematic simulation,but a dynamic one provided by the formalism described in Section 2, inwhich the value of the problem variable associated to the cylinder, s, isimposed by means of an additional kinematic constraint (in the general case,knowing the motion of the hydraulic cylinders does not imply that the fullsystem motion is known and, hence, the equations of motion should still beintegrated). Therefore, the constraints vector is not that shown in Eq. (35),but the following one,
Φ =
(x1 − xA)2 + (y1 − yA)2 − (0.5L)2
(x2 − xA) − 2 (x1 − xA)(y2 − yA) − 2 (y1 − yA)
(x1 − xB)2 + (y1 − yB)2 − s2
s − s(t)
(39)
Finally, a third simulation implementing a multi-rate integration scheme (dif-ferent integrators and time steps) was carried out. The multibody problemconducted the integration. A time step of 10 ms was adopted for the multi-body integration, while the hydraulic problem was integrated through a for-ward Euler integrator with a time step of 0.2 ms, the largest that reached con-vergence. These time-step sizes imply that, at every iteration of the multibodyproblem, the hydraulic problem must be integrated 50 times.
The integration of the hydraulic expressions given in Eq. (29) assumes aconstant elongation velocity of the actuator during the multibody time step.This velocity is approximated by the length variation divided by the time-stepsize:
s =s (tn+1) − s (tn)
∆t(40)
The Newton-Raphson scheme of the multibody integration yields, at everyiteration step, a variation of the elongation at time tn+1, so that a new inte-gration of the hydraulic equations is required. Therefore, the total time of thesimulation will be larger than in the case of the unified approach. However,the theoretically more accurate solution will serve to validate the solutionprovided by the scheme proposed in this paper.
The results obtained from the three simulations, along with their discus-sion, are addressed in the next Section.

236 MIGUEL A. NAYA, JAVIER CUADRADO, DANIEL DOPICO, URBANO LUGRIS
5. Results and discussion
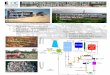
Fig. 3 shows the histories of the cylinder length, s, and its first derivative,s. Fig. 4 plots the difference between the elongation, s, obtained by the unifiedmethod and the multi-rate integration. Fig. 5 presents the histories of thepressures p1 and p2. A detail of the discrepancies between both solutions ispresented in Fig. 6, where the grey line provides the solutions of the multi-rate integration while the black line represents the solutions of the unifiedmethod.
Fig. 7 illustrates the actuator force, including the damping losses. Fig. 8plots the histories of the total energy, the kinetic energy, the potential energy,and the work performed by the actuator (including the damping losses again).Fig. 9 displays the violation of the constraints and their first and secondderivatives (in all the three cases, the plotted magnitude is the norm of thecorresponding vector). The abrupt jumps at t =2 s and t =6 s are due tothe sudden changes of the spool motion at those instants. At t =2 s themechanism is in equilibrium position, so that the influence of starting thespool motion is lower than that of stopping it at t=6 s. The constraintsbehavior reveals the difficulty of keeping the mechanism assembled underthe actuating forces. Anyway, the norm of the constraints vector is kept underthe imposed tolerance of 1.e-7.
Solutions in position, velocity and acceleration of the cylinder showpractically no discrepancies between the two methods. Because of this, onlyone single line can be seen in the plots and the difference between the solutionprovided by the multi-rate and unified integration is detailed in Fig. 4. Noticethat this difference is under 0.1 mm in the positions.
In order to validate the solution of the unified scheme, a comparison ofthe evolution of the pressures is illustrated in Fig. 5 and a detail of the pickvalue of pressure p1 is provided in Fig. 6. As explained before, the hydraulicproblem is stiff, this behavior being evidenced in Fig. 6. The multi-ratescheme employs a smaller integration step for the hydraulic problem andtherefore yields a smoother solution. In general terms, the solution of theunified scheme is accurate and oscillations are not relevant.
It must be said that, although typical values of the penalty factor α (seeEq. (5)) are in the range 107-109, in this case a value of α=1010 has beenshown to provide the best convergence properties for the Newton-Raphsoniteration of the unified scheme. The need of such a large penalty factor isdue to the stiffness introduced in the system by the hydraulic equations.

AN EFFICIENT UNIFIED METHOD FOR THE COMBINED SIMULATION OF MULTIBODY. . . 237
0 1 2 3 4 5 6 7 8 9 100.45
0.5
0.55
(s)
(m)
0 1 2 3 4 5 6 7 8 9 10-0.01
0
0.01
0.02
0.03
(s)
(m/s
)
Fig. 3. Histories of the cylinder length, s, and its first derivative, s
0 1 2 3 4 5 6 7 8 9 10
-8
-7
-6
-5
-4
-3
-2
-1
0
x 10-5
(s)
(m)
Fig. 4. Difference between the histories of the cylinder elongation obtained by multi-rate and
unified method
0 1 2 3 4 5 6 7 8 9 103
3.2
3.4
3.6
(s)
(MP
a)
0 1 2 3 4 5 6 7 8 9 104
4.2
4.4
4.6
(s)
(MP
a)
Fig. 5. Histories of the pressures p1 and p2

238 MIGUEL A. NAYA, JAVIER CUADRADO, DANIEL DOPICO, URBANO LUGRIS
5.8 6 6.2 6.4 6.6 6.8 7 7.23.45
3.46
3.47
3.48
3.49
3.5
(s)
(MP
a)
Fig. 6. Detail of the discrepancies between p1 values obtained by multi-rate (grey) and unified
method (black)
0 1 2 3 4 5 6 7 8 9 102000
3000
4000
5000
6000
7000
8000
9000
(s)
(N)
Fig. 7. History of the actuator force, including the damping losses
0 1 2 3 4 5 6 7 8 9 10-1
0
1
(s)
(J)
0 1 2 3 4 5 6 7 8 9 100
0.5
1
(s)
(J)
0 1 2 3 4 5 6 7 8 9 101500
2000
2500
(s)
(J)
0 1 2 3 4 5 6 7 8 9 10-1000
0
1000
(s)
(J)
Fig. 8. Histories of the total, kinetic and potential energy, and actuator work

AN EFFICIENT UNIFIED METHOD FOR THE COMBINED SIMULATION OF MULTIBODY. . . 239
0 1 2 3 4 5 6 7 8 9 100
1
2x 10
-7
(s)
0 1 2 3 4 5 6 7 8 9 100
0.5
1x 10
-13
(s)
0 1 2 3 4 5 6 7 8 9 100
2
4x 10
-11
(s)
Fig. 9. Violation of the constraints and their first and second derivatives
In regard to the integration time-step size, the plotted results in Figs. 3through 9 have been obtained with a fixed time-step of 10 ms for the unifiedintegration scheme, the multibody part of the multi-rate integration scheme,and the simplified simulation. Of course, smaller time-step sizes have beentested too and can be used without any problem. The integration time-stepsize for the hydraulic problem in the multi-scale scheme has been set to0.2 ms. Larger time steps did not reach convergence when using the for-ward Euler integrator. However, if the trapezoidal rule is employed, a time-step size of 10 ms can be reached. In this case, the histories of the pres-sures are equal to those obtained with the unified scheme and showed inFig. 5.
The number of iterations required for convergence with α=1010 and∆t=10 ms has been two or three at the more demanding instants of thesimulation (around t=2 s and t=6 s) and just one for the rest. The plot ofthe total energy in Fig. 6 shows good conservation properties: there is avariation of 1 J in the total energy during the simulation, which is a smallquantity compared to variations of potential energy and actuator work ofaround 1000 J. The plots of constraints violation at position, velocity andacceleration levels in Fig. 7 prove that constraint satisfaction is kept withinvery strict limits. Therefore, the algorithm has shown a good behavior forsuch a large time-step size of integration, which confirms that it conservesthe robustness already demonstrated in multibody simulations.
Regarding the efficiency, CPU-times measured for the three simulationsperformed are shown in Table 1. The programs were developed and runin Matlab computing environment, which means that absolute CPU-timesare not representative, yet they serve for comparison among the differentapproaches.

240 MIGUEL A. NAYA, JAVIER CUADRADO, DANIEL DOPICO, URBANO LUGRIS
In Table 1, the increase in computational cost motivated by the inclusionof the hydraulic equations in the unified scheme is around 20% with respectto the simplified simulation, that only considers the multibody problem. Froma theoretical point of view, the increase in computational cost is basicallydue to two factors: first, to the larger problem size, since the pressures areadded to the problem variables, and, second, to the non-symmetric characterof the new approximated tangent matrix of the Newton-Raphson iteration.
Table 1.CPU-times for the three compared approaches
Simulation CPU-time (s)
Kinematic guidance 0.338
Unified integration 0.389
Multi-rate integrationForward Euler (∆t = 0.2 ms) 5.895
Trapezoidal Rule (∆t = 10 ms) 0.672
The comparison between the unified scheme and the multi-rate approachis very favorable to the unified scheme. Multi-rate integration with the for-ward Euler integrator implies to evaluate and integrate the hydraulic equa-tions 50 times at each iteration within a time step of the multibody inte-gration. As can be seen in Table 1, the use of a more stable integrator asthe trapezoidal rule for the hydraulic problem leads to a smaller differencebetween the unified and multi-rate schemes, since this integrator allows toemploy a time-step size of 10 ms for the integration of the hydraulic problem.
Table 2 shows the fastest simulations that provide a smooth solution ofthe pressure problem when a multi-rate integration is performed. As it canbe seen, the simulation does not converge for time-step sizes larger than0.2 ms with the forward Euler integrator. In the case of the trapezoidal rule,a time-step size of 5 ms can be reached; faster simulations are also possible,but larger time-step sizes lead to non-smooth results.
Table 2.Fastest simulations with smooth solution of the hydraulic problem for multi-rate integration
Integrator CPU-time (s)
Forward Euler (∆t = 0.2 ms) 5.895
Trapezoidal Rule (∆t = 5 ms) 1.021
Finally, Table 3 shows the main features of the different approaches.When considering the kinematic guidance, precision is not taken into accountbecause the actual hydraulic problem is not resolved. Regarding the multi-rateintegration with the trapezoidal rule as integrator for the hydraulic problem,

AN EFFICIENT UNIFIED METHOD FOR THE COMBINED SIMULATION OF MULTIBODY. . . 241
the presented characteristics correspond to a time-step size of 5 ms, sincethis is the largest one that provides a smooth solution.
Table 3.Properties of the different methods
Simulation
Effi
cien
cy
Acc
urac
y
Eas
eof
impl
emen
t.
Kinematic guidance ***** - *****
Unified integration ***** *** *
Multi-rate integrationForward Euler * ***** ****
Trapezoidal Rule *** ***** ****
Several consequences can be derived from Table 3. The use of the unifiedintegration scheme is adequate when efficiency is paramount. Otherwise,the multi-rate integration is recommended; in such a case, the use of thetrapezoidal rule as integrator provides a good compromise between efficiencyand accuracy.
Evidently, these trends require further confirmation in the simulation oflarge and complex machines like, for example, the full model of an excavator,but the analysts interested in moving from the simplified approach to theintegration of the hydraulic equations may use this study as a starting point.
6. Conclusions
Based on the results reported herein, the following conclusions can beestablished:• The augmented Lagrangian formulation traditionally used to address multi-
body dynamics problems preserves its robustness when facing combinedmultibody and hydraulic dynamics problems in a unified approach. Forthe academic example studied, a large time-step size of 10 ms could betaken, but a high penalty factor of 1010 was required in order to keep goodconvergence properties, due to the stiffness of the hydraulic equations.
• The increase in computational cost motivated by the inclusion of thehydraulic equations when compared with a simplified modeling of thehydraulic problem through kinematic guidance of the actuators is mod-erated, and due mainly to the larger resulting problem size and the non-symmetric character of the approximated tangent matrix. A 20% increase

242 MIGUEL A. NAYA, JAVIER CUADRADO, DANIEL DOPICO, URBANO LUGRIS
was measured for the academic example considered. Therefore, it can beaffirmed that efficiency is not substantially altered when moving from asimplified to a fully-coupled approach.
• The unified approach is more efficient than the multi-rate integrationscheme due to the lower number of evaluations of the hydraulic equa-tions required. However, this higher efficiency is achieved at the cost ofobtaining a less smooth solution for the hydraulics.
• If a smooth solution of the hydraulics is required, the multi-rate integra-tion scheme with an implicit integrator for the hydraulic problem providesa good compromise between efficiency and accuracy, and requires lessimplementation effort than the unified approach.
The authors would like to acknowledge the support of this work by theSpanish Government under grant DPI2006-15613-C03-01.
Manuscript received by Editorial Board, February 02, 2011;final version, April 14, 2011.
REFERENCES
[1] Cuadrado J., Cardenal J., Morer P., Bayo E.: Intelligent Simulation of Multibody Dynamics:Space-State and Descriptor Methods in Sequential and Parallel Computing Environments,Multibody System Dynamics, Vol. 4, pp. 55-73, 2000.
[2] Cuadrado J., Dopico D., Gonzalez M., Naya M.A.: A Combined Penalty and RecursiveReal-Time Formulation for Multibody Dynamics, Journal of Mechanical Design, Vol. 126,pp. 602-608, 2004.
[3] Fales R., Spencer E., Chipperfield K., Wagner F., Kelkar A.: Modeling and Control of a WheelLoader with a Human-in-the-Loop Assessment using Virtual Reality, Journal of DynamicSystems, Measurement, and Control, Vol. 127, pp. 415-423, 2005.
[4] Sekhavat P., Sepehri N., Wu Q.: Impact Stabilizing Controller for Hydraulic Actuators withFriction: Theory and Experiments, Control Engineering Practice, Vol. 14, pp. 1423-1433,2005.
[5] Merritt H.E.: Hydraulic Control Systems, Wiley, New York, 1967.[6] Eryilmaz B., Wilson B.H.: Unified Modeling and Analysis of a Proportional Valve, Journal
of the Franklin Institute, Vol. 343, pp. 48-68, 2006.[7] Gonzalez M., Luaces A., Dopico D., Cuadrado J.: A 3D Physics-Based Hydraulic Exca-
vator Simulator, Proceedings of the ASME World Conference on Innovative Virtual Reality(WINVR09), Paper 734, Chalon-sur-Saone, France, 2009.
[8] Vaculin M., Valasek M., Kruger W.R.: Overview of Coupling of Multibody and ControlEngineering Tools, Vehicle System Dynamics, Vol. 41, pp. 415-429, 2004.
[9] Valasek M.: Modeling, Simulation and Control of Mechatronical Systems, Simulation Tech-niques for Applied Dynamics (Arnold M. and Schiehlen W. eds.), Springer, Wien-New York,2008.
[10] Bruls O., Arnold M.: The Generalized-α Scheme as a Linear Multistep Integrator: Towardsa General Mechatronic Simulator, Proceedings of the ASME Int. DETC & CIEC, Las Vegas,Nevada, USA, 2007.

AN EFFICIENT UNIFIED METHOD FOR THE COMBINED SIMULATION OF MULTIBODY. . . 243
[11] Pfeiffer F., Foerg M., and Ulbrich H.: Numerical Aspects of Non-Smooth Multibody Dy-namics. Computer Methods in Applied Mechanics and Engineering, Vol. 195, pp. 6891-6908,2006.
[12] Busch M., Arnold M., Heckmann A., Dronka S.: Interfacing SIMPACK to Modelica/Dymolafor Multi-Domain Vehicle System Simulations, SIMPACK News, Vol. 11, No. 2, pp. 1-3,2007.
[13] Cardona A. and Geradin M.: Modeling of a Hydraulic Actuator in Flexible Machine DynamicsSimulation, Mechanisms and Machine Theory, Vol. 25, pp. 193-207, 1990.
[14] Bauchau O.A. and Liu H.: On the Modeling of Hydraulic Components in Rotorcraft Systems,Journal of the American Helicopter Society, Vol. 51, pp. 175-184, 2006.
[15] Welsh W.A.: Simulation and Correlation of a Helicopter Air-Oil Strut Dynamic Response,Proceedings of the American Helicopter Society 43rd Annual Forum, St. Louis, Missouri,USA, 1987.
[16] Garcia de Jalon J., Bayo E.: Kinematic and Dynamic Simulation of Multibody Systems –TheReal-Time Challenge–, Springer-Verlag, New York, 1994.
Skuteczna, zunifikowana metoda połączonej symulacji dynamiki systemu wieloczłonowegoi hydraulicznego: porównanie podejścia uproszczonego i integracyjnego
S t r e s z c z e n i e
W Laboratorium Budowy Maszyn (Laboratory of Mechanical Engineering) Uniwersytetu LaCoruna opracowano solidne i skuteczne sformułowanie problemu symulacji umożliwiające symu-lację dużych, skomplikowanych systemów wieloczłonowych. Opracowano symulatory samochodów,koparek i innych maszyn wykazując, że można wykonać symulacje w czasie rzeczywistym, nawetw sytuacji skomplikowanych manewrów.
Siłowniki hydrauliczne są wykorzystywane w wielu zastosowaniach przemysłowych w sys-temach wieloczłonowych, np. w maszynach roboczych. Przy symulacji tego rodzaju systemów,w których występuje połączenie hydrauliki z dynamiką systemów wieloczłonowych, można naj-częściej zastosować jedno z dwu podejść: ograniczyć się do kinematycznego sterowania zmien-ną długością siłownika, unikając w ten sposób konieczności uwzględnienia dynamiki systemuhydraulicznego albo, gdy wymagany jest bardziej szczegółowy opis problemu, np. gdy celemsymulacji jest optymalizacja sterowania pompy, wykonać wielostopniowe całkowanie w obydwusystemach.
W przedstawionej pracy dokonano włączenia dynamiki siłowników hydraulicznych do wspom-nianego wyżej samodzielnego sformułowania dla systemu wieloczłonowego, co doprowadziło dopodejścia zunifikowanego. Zaprezentowano przykład akademicki, w którym porównano efekty-wność, dokładność i łatwość implementacji podejść uproszczonego (sterowanie kinematyczne),wielostopniowego i zunifikowanego. To porównanie jest najważniejszym przyczynkiem, jaki wnosiprezentowana praca, gdyż może służyć wskazaniu wyboru właściwego podejścia w zależności odcharakterystyk problemu.