Embed Size (px)
Citation preview

International Journal of Advancements in Computing Technology Volume 2, Number 4, October 2010
An Efficient Fuzzy-GA Flow Control of Turbine Compressor
System: A Process Control Case Study
Rahul Malhotra Research Scholar,
Punjab Technical University, Jalandhar, Punjab, India [email protected]
Narinder Singh Ex-Prof., Thapar University,
Patiala, Punjab, India Director, GGS Colleges,
Talwandi Sabo (Pb.), India
Yaduvir Singh
Associate Professor Thapar University, Patiala,
Punjab, India [email protected]
doi: 10.4156/ijact.vol2.issue4.14
Abstract In this paper, an optimal control for gas turbine and compressor system using fuzzy logic, genetic
algorithms have been suggested. Gas turbine compressor system is most widely used in chemical industries. The primary objective of this kind of setup is to control the flow rate of high pressure steam. Different controller architecture has been taken up to control the flow of gas. Firstly, a conventional PID controller is used to control the flow, which cannot provide an optimal control due to its inherent disadvantages. To overcome this problem artificial intelligence techniques using fuzzy logic and genetic algorithms have been implemented. The transient and steady state response and performance criteria IAE, ITAE have been discussed. The result shows the better optimization of fuzzy GA controllers.
Keywords: Fuzzy logic controller, Gas turbine, Genetic algorithm, PID controller 1. Introduction
Traditionally, control systems modeling have been based upon the use of mathematical techniques to model the input/output relationship of the system. Such an approach relies upon a mathematical description of the plant in order to model the behavior of the system, subject to certain conditions and assumptions. Many real-world systems however, may not be as readily described mathematically due to the complexity of the components of the plant and the interaction between them, and consequently, the model may be subject to certain assumptions or conditions. In such models, the degree of mathematical precision required to completely describe every aspect of the process, is either prohibitive or non-trivial. In addition, for actual implementation of such systems, heuristics, gained through human experience, are often employed in the tuning of the final controller.
The use of Fuzzy Logic [21] has found application in the area of control system design where human expert knowledge, rather than precise mathematical modeling, of a process or plant is used to model or implement the required controller. Human expert knowledge is based upon heuristic information gained in relation to the operation of the plant or process, and its inherent vagueness ("fuzziness") offers a powerful tool for the modeling of complex systems. Uncertainty and ambiguity are evident in many engineering problems [1, 2]. Fuzzy Logic Control (FLC) therefore provides a formal method of translating subjective and imprecise human knowledge into control strategies, thus facilitating better system performance through the exploitation and application of that knowledge. Optimal design of the FLC knowledge base is central to the performance of the FLC. The rule base reflects the human expert knowledge [22], expressed as linguistic variables, while the membership functions represent expert interpretation of the variables. In the absence of such knowledge, a common approach is to optimize these FLC parameters through a process of trial and error, with respect to the performance of the system for each knowledge base formulated. This approach becomes impractical for systems having significant numbers of inputs since the rule-base size grows exponentially and consequently the number of rule combinations becomes significantly large.
The use of Genetic Algorithms (GA) [4] in this regard can provide such a solution. Genetic Algorithms (GA's) are robust, numerical search methods that mimic the process of natural selection. Although not guaranteed to absolutely find the true global optima in a defined search space, GA's are renowned for finding relatively suitable solutions within acceptable time frames and for applicability to
128

An Efficient Fuzzy-GA Flow Control of Turbine Compressor System: A Process Control Case Study Rahul Malhotra, Narinder Singh, Yaduvir Singh
many problem domains. Using primary concepts of genetic selection, crossover and mutation [7], GA's are a stochastic, but directed method of identifying global optima within a problem domain-space. This is achieved through successive performance testing of potential solutions, which collectively form a population, with respect to a problem objective function. In this way, convergence to optimal solutions is achieved.
The knowledge base of a Fuzzy Logic Controller (FLC) encapsulates expert knowledge and consists of the data base and rule-base of the controller [19]. Optimization of both of these knowledge base components is critical to the performance of the controller and has traditionally been achieved through a process of trial and error. Such an approach is convenient for FLCs having low numbers of input variables, however for greater numbers of inputs, more formal methods of knowledge base optimization are required. Genetic Algorithms (GA's) provide such a method. They are stochastic, but directed, numerical search methods which use operators consistent with evolutionary theory and find application in many disciplines, particularly function optimization problems. Although not learning algorithms in the strict sense, GA's can be applied to learning tasks [5]. The organization of paper is as follows: Section I gives the introduction about fuzzy logic and GA. Section II shows the mathematical modeling and designing of Gas turbine using PID controller, Fuzzy controller and Fuzzy-GA controller. Section III shows the simulation work and the comparative performance of the above controllers. Finally, the results and discussion have been given in the section IV. Section V gives the conclusion of the work. 2. Case Study
In chemical plants gas turbine is used to drive the compressor [18]. A turbine is a mechanical device that extracts thermal energy from pressurized steam, and converts it into rotary motion. Its modern manifestation was invented by Sir Charles Parsons in 1884. The compressors are of centrifugal type [6]. They consume much power due to the fact that very large volume flows are handled. The combination gas turbine-compressor is highly reliable. Hence the turbine-compressor play significant role in the operation of the plants. The high pressure steam (HPS) is used to drive the gas turbine [13]. The turbine is coupled with the compressor and eventually the compressor is run by the gas turbine. The hydraulic governor [14] is used to control the flow of the high pressure steam. In the above set up, the high pressure steam is usually used to drive the turbine. The turbine which is coupled to the compressor will then drive the compressor. The hydraulic governor which acts as a control valve will be used to throttle the amount of steam going to the turbine section. The governor opening is being controlled by a PID which is in the electronic governor control panel [19, 7].
Turbine Compressor
Electronic GovernorController
Speed (S.P)
Speed Signal
HPS
Figure 1. Schematic diagram of turbine compressor system with electronic governor control
2. 1. Mathematical Modelling
The basic conventional feedback controller is shown in figure 2. In conventional PID controller the
controller and the process are in series where as a feedback from the output is given to the input. The
129

International Journal of Advancements in Computing Technology Volume 2, Number 4, October 2010
turbine compressor system is mathematically modelled using experimental data available [19] and the
transfer function of the above system is achieved as 3 2
3( )6 5
G ss s s
=+ +
.
PID ProcessR(s) C(s)
Figure 2. Block diagram of classical control architecture
The stability analysis of the system is done and the bode plot of the system is plotted which is shown in figure 3. The gain margin is 20 db where as the phase margin is 56.2°.
Figure 3. Frequency domain analysis of the system
2. 2. PID controller design and tuning
A feedback control system measures the output variable and sends the control signal to the
controller. The controller compares the value of the output signal with a reference value and gives the control signal to the final control element via the actuator. The characteristic equation obtained as below.
3 26 5 0ps s s K+ + + = (1)
Applying Routh criteria in Eq.(1) we get Kp = 30 From auxiliary equation in Routh criteria we get ω = 2.23 and T = 2.81. The equation of ideal PID controller is
0
1 ( )( ) ( ) ( )t
c di
de tU t K e t e t dtdt
ττ
= + +
∫ (2)
The Laplace transform of Eq.(2) is
130

An Efficient Fuzzy-GA Flow Control of Turbine Compressor System: A Process Control Case Study Rahul Malhotra, Narinder Singh, Yaduvir Singh
1( ) 1 ( )c di
U s K s E ss
ττ
= + +
(3)
21
( ) ( )i i dc
i
s sU s K E s
sτ τ ττ
+ +=
(4)
The real PID controller is
1 1( ) ( )
1i d
c
i d
s sU s K E s
s s
τ τ
τ ατ
+ +=
+
(5)
The PID controller is traditionally suitable for second and lower order systems. It can also be used
for higher order plants with dominant second order behavior. The Ziegler-Nichols (Z-N) methods rely on open-loop step response or closed-loop frequency response tests. A PID controller is tuned according to a table based on the process response test. According to Zeigler-Nichols frequency response tuning criteria 0.6p cK K= , 0.5i Tτ = and 0.125d Tτ = . For the PID controller in above case study, the values of tuning parameters obtained are KP=18, τ i=1.4, τd
Usually, initial design values of PID controller obtained by all means needs to be adjusted repeatedly through computer simulations until the closed loop system performs or compromises as desired. This stimulates the development of “intelligent” tools that can assist the engineers to achieve the best overall PID control for entire operating envelops.
=0.3 and P= 30, I= 21.4, D=9
2. 3. Design of fuzzy logic controller
PID controller is a standard control structure for classical control theory. But the performance is
greatly distorted and the efficiency is reduced due to nonlinearity in the process plant. The fuzzy PID controllers are the natural extension of their conventional version, which preserve their linear structure of PID controller. The fuzzy PID controllers are designed using fuzzy logic control principle in order to obtain a new controller that possesses analytical formulas very similar to digital PID controllers [23]. Fuzzy PID controllers have variable control gains in their linear structure. These variable gains are nonlinear function of the errors and changing rates of error signals. The main contribution of these variable gains in improving the control performance is that they are self- tuned gains and can adapt to rapid changes of the errors and rate of change of error caused by time delay effects, nonlinearities and uncertainties of the underlying process.
DefuzzificationFuzzification FuzzyReasoning
FuzzyKnowledge Base
Error
e (t)
Actuation
u (t)
Figure 4. Architecture of fuzzy control
In this paper different linguistic variables have been considered as per detailed in Table 1.
131

International Journal of Advancements in Computing Technology Volume 2, Number 4, October 2010
Table 1. Linguistic variable of fuzzy logic control
Error e(t) Change in error ∆e(t) Controller output u(t) NB Negative Big NB Negative Big NB Negative Big NM Negative Medium NM Negative Medium NM Negative Medium NS Negative Small NS Negative Small NS Negative Small ZO Zero ZO Zero ZO Zero PS Positive Small PS Positive Small PS Positive Small PM Positive Medium PM Positive Medium PM Positive Medium PB Positive Big PB Positive Big PB Positive Big
Designing a good fuzzy rule base is the key to obtain satisfactory control performance for a particular
operation. Classical analysis and control strategy are incorporated in the rule base. The rule base used in simulation is summarized in Table II. Each rule has the form IF e(t) is NB AND ∆e(t) is NB THEN u(t) is NB. The control literature has worked towards reducing the size of the rule base and optimizing the rule base using different optimization techniques like GA, PSO for intelligent controller. At last defuzzified output is obtained from the fuzzy inputs. In this research work centroid method of de fuzzification is used. It is given as below.
*( ) *
( )c
c
u uduu
u du
µ
µ= ∫∫
(6)
Figure 5. Membership functions of inputs and output
Table 2. If-then rule base for fuzzy logic control
u(t)
e(t) NB NM NS ZO PS PM PB
∆e(t)
NB NM NS ZO PS PM PB
NB NB NB NB NM NS ZO
NB NB NB NM NS ZO PS
NB NB NM NS ZO PS PM
NB NM NS ZO PS PM PB
NM NS ZO PS PM PB PB
NS ZO PS PM PB PB PB
ZO PS PM PB PB PB PB
2. 4. Optimization using genetic algorithm
132

An Efficient Fuzzy-GA Flow Control of Turbine Compressor System: A Process Control Case Study Rahul Malhotra, Narinder Singh, Yaduvir Singh
Genetic Algorithms are intelligent optimization technique [12] that relies on the parallelism found in nature; in particular its searching procedures are based on the mechanics of natural selection and genetics. GAs was first conceived in the early 1970s by Holland. GAs is used regularly to solve difficult search, optimization, and machine-learning problems that have previously resisted automated solutions. They can be used to solve difficult problems quickly and reliably. These algorithms are easy to interface with existing simulations and models, and they are easy to hybridize. GAs includes three major operators: selection, crossover, and mutation, in addition to four control parameters: population size, selection pressure, crossover and mutation rate [15]. Population-based optimization methods are addressed also. This paper is concerned primarily with the selection and mutation operators. There are three main stages of a genetic algorithm; these are known as reproduction, crossover and mutation. The algorithm of a genetic algorithm is described below.
[Start] Generate random population of n chromosomes (suitable solutions for the problem). [Fitness] Evaluate the fitness f(x) of each chromosome x in the population. [New population] Create a new population by repeating following steps until the new population is complete. a) Selection. Select two parent chromosomes from a population according to their fitness (the better fitness, the bigger chance to be selected). b) Crossover. With a crossover probability, cross over the parents to form new offspring (children). If no crossover was performed, offspring is the exact copy of parents. c) Mutation. With a mutation probability, mutate new offspring at each locus (position in chromosome). d) Accepting. Place new offspring in the new population. [Replace] Use new generated population for a further run of the algorithm. [Test] If the end condition is satisfied, stop, and return the best solution in current population. [Loop] Go to step 2.
The objective functions [19] are MSE (Mean Square Error), IAE (Integral Absolute Error), ISE (Integral Square Error) and ITAE (Integral Time Absolute Error). The main objective of PID controller is to minimize the error signal or in other words we can say that minimization of performance indices.
2
0
1( ( ))
t
MSE e tt
= ∫ (7)
0
( )t
IAE e t dt= ∫ (8)
2
0
( )t
ISE e t dt= ∫ (9)
0
( )t
ITAE t e t dt= ∫ (10)
The fitness value of the chromosome is the inverse of the performance indices. The fitness value is
used to select the best solution in the population to the parent and to the offspring that will comprise the next generations. The fitter the parent greater is the probability of selection. This emulates the evolutionary process of “survival of the fittest”. Parents are selected using roulette wheel selection method.
133

International Journal of Advancements in Computing Technology Volume 2, Number 4, October 2010
Figure 6. Membership functions and chromosomes
The chromosome string is [c1 w1 c2 w2 c3 w3]. Each parameter is a 4 bit string. So the fuzzy membership function can be represented as [100011111000111110001111].
Figure 7. Root locus of the system
Fitness function is reciprocal of performance indices. In this paper, the discrete form of ITAE has
been taken. ITAE is treated as performance indices and fitness function denoted by J can be described below.
{ }[ ]1
0
1
( ) ( )N
k
Jr kT c kT T
−
=
=−∑
(11)
The state space representation of the system is given below.
6 5 0
1 0 0
0 1 0
A
− −
=
,
1
0
0
B =
, [ ]0 0 3C = and D = 0
3. SIMULATION STUDIES
This section gives simulation results of the above case study. All the simulations have been carried
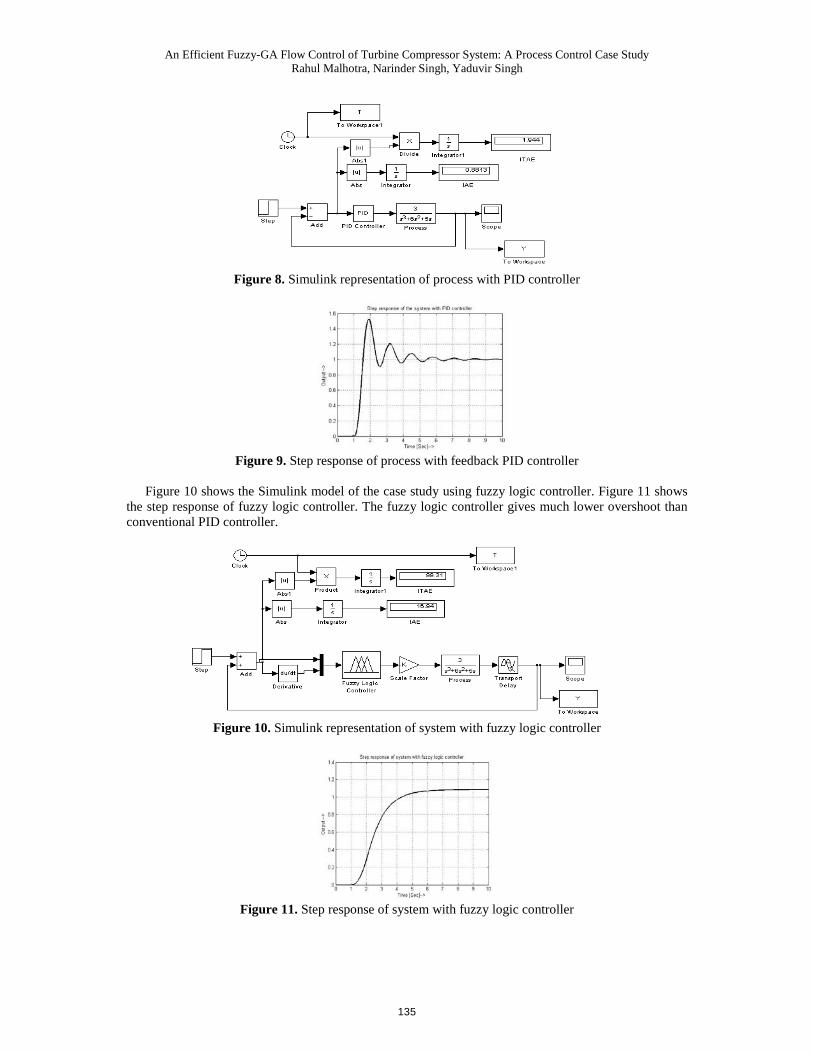
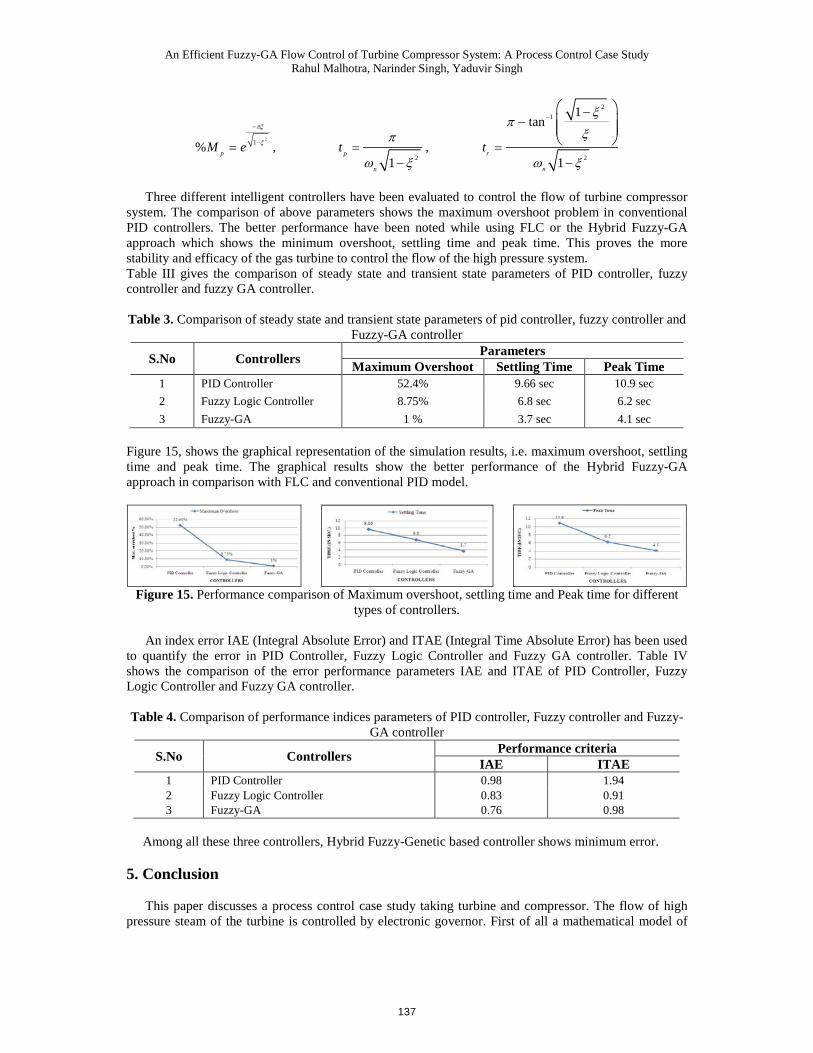
out using MATLAB Simulink. Figure 8 shows the Simulink model of the case study, controlled by PID controller. Figure 9 shows the step response of the process controlled by feedback PID controller. The step response characteristics give a very high overshoot which is not at all desirable.
134
An Efficient Fuzzy-GA Flow Control of Turbine Compressor System: A Process Control Case Study Rahul Malhotra, Narinder Singh, Yaduvir Singh
Figure 8. Simulink representation of process with PID controller
Figure 9. Step response of process with feedback PID controller
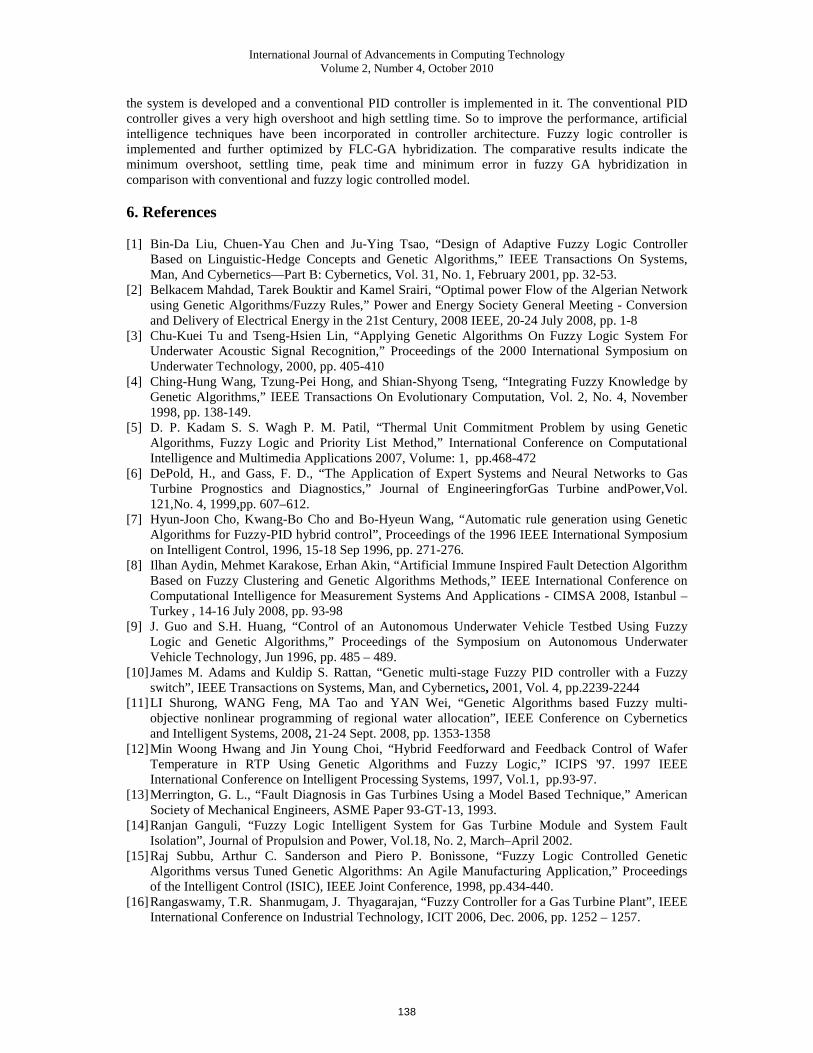
Figure 10 shows the Simulink model of the case study using fuzzy logic controller. Figure 11 shows
the step response of fuzzy logic controller. The fuzzy logic controller gives much lower overshoot than conventional PID controller.
Figure 10. Simulink representation of system with fuzzy logic controller
Figure 11. Step response of system with fuzzy logic controller
135

International Journal of Advancements in Computing Technology Volume 2, Number 4, October 2010
Simulink design optimization can generate comparative plots of estimation results to help determine
which model parameter values result in the best model and measured data fit. Simulink design optimization provides access to a variety of optimization algorithms.GA is pattern search algorithm, by which the optimization process can be fine tuned.
Simulink design optimization automatically tunes model parameters to meet time domain requirements. The optimization of any design criterion can be done by expressing it as a Simulink signal and connecting this signal to the signal constraint block provided by Simulink design optimization. The signal constrained block constrains the signal either graphically shaping the desired response or specifying a reference signal trajectory. The signals constrain block GUI updates during optimization process. Figure 12 shows the Simulink representation of the case study using Fuzzy-GA using the optimization block set of Simulink.
Figure 12. Simulink representation of the process using Fuzzy-GA
Figure 13 shows the step response of fuzzy-GA system which is better optimized than fuzzy logic
controller and PID controller. This shows the superiority of fuzzy-GA hybridization over conventional techniques.
Figure 13. Step response of fuzzy-GA system
4. RESULTS AND DISCUSSIONS
This section shows a comparative study between different controllers. In this paper, three steady state
and transient state parameters have been considered. These parameters are maximum overshoot, settling time and peak time expressed below:
136
An Efficient Fuzzy-GA Flow Control of Turbine Compressor System: A Process Control Case Study Rahul Malhotra, Narinder Singh, Yaduvir Singh
21% pM e
πξ
ξ
−
−= , 21
p
n
tπ
ω ξ=
−,
21
2
1tan
1r
n
t
ξπ
ξ
ω ξ
− −−
=−
Three different intelligent controllers have been evaluated to control the flow of turbine compressor
system. The comparison of above parameters shows the maximum overshoot problem in conventional PID controllers. The better performance have been noted while using FLC or the Hybrid Fuzzy-GA approach which shows the minimum overshoot, settling time and peak time. This proves the more stability and efficacy of the gas turbine to control the flow of the high pressure system. Table III gives the comparison of steady state and transient state parameters of PID controller, fuzzy controller and fuzzy GA controller. Table 3. Comparison of steady state and transient state parameters of pid controller, fuzzy controller and
Fuzzy-GA controller
S.No Controllers Parameters Maximum Overshoot Settling Time Peak Time
1 PID Controller 52.4% 9.66 sec 10.9 sec 2 Fuzzy Logic Controller 8.75% 6.8 sec 6.2 sec 3 Fuzzy-GA 1 % 3.7 sec 4.1 sec
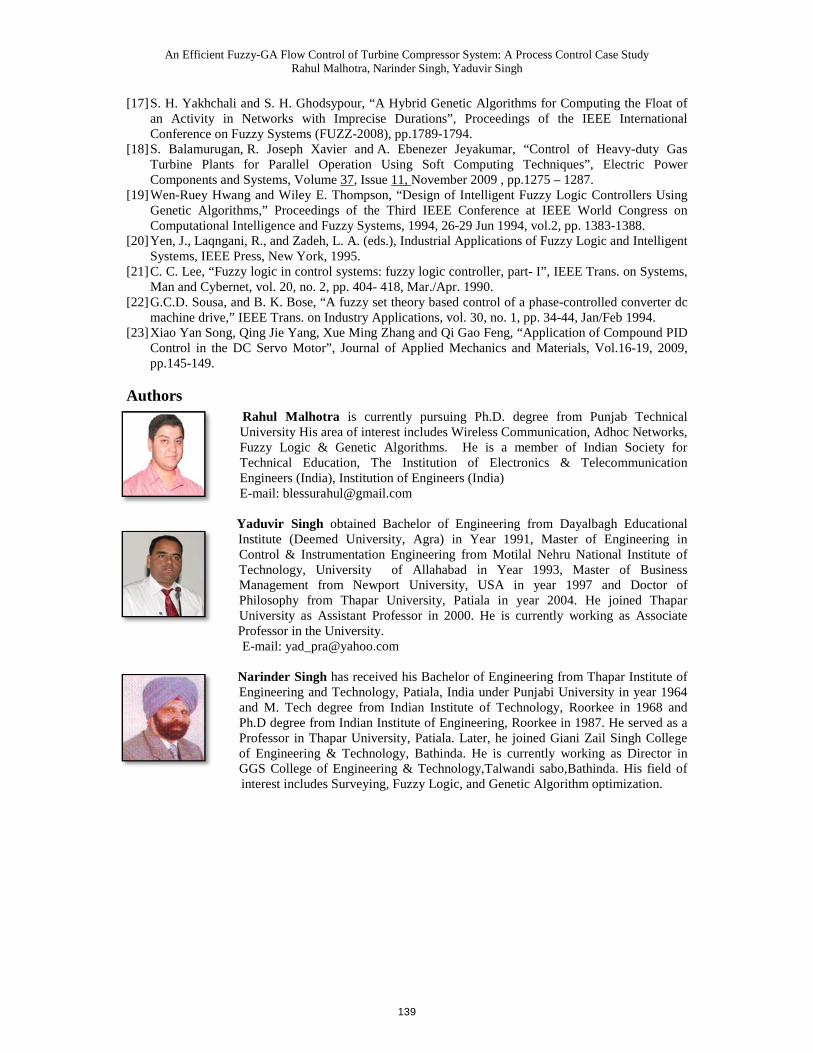
Figure 15, shows the graphical representation of the simulation results, i.e. maximum overshoot, settling time and peak time. The graphical results show the better performance of the Hybrid Fuzzy-GA approach in comparison with FLC and conventional PID model.
Figure 15. Performance comparison of Maximum overshoot, settling time and Peak time for different
types of controllers.
An index error IAE (Integral Absolute Error) and ITAE (Integral Time Absolute Error) has been used to quantify the error in PID Controller, Fuzzy Logic Controller and Fuzzy GA controller. Table IV shows the comparison of the error performance parameters IAE and ITAE of PID Controller, Fuzzy Logic Controller and Fuzzy GA controller. Table 4. Comparison of performance indices parameters of PID controller, Fuzzy controller and Fuzzy-
GA controller
S.No Controllers Performance criteria IAE ITAE
1 PID Controller 0.98 1.94 2 Fuzzy Logic Controller 0.83 0.91 3 Fuzzy-GA 0.76 0.98
Among all these three controllers, Hybrid Fuzzy-Genetic based controller shows minimum error.
5. Conclusion
This paper discusses a process control case study taking turbine and compressor. The flow of high
pressure steam of the turbine is controlled by electronic governor. First of all a mathematical model of
137
International Journal of Advancements in Computing Technology Volume 2, Number 4, October 2010
the system is developed and a conventional PID controller is implemented in it. The conventional PID controller gives a very high overshoot and high settling time. So to improve the performance, artificial intelligence techniques have been incorporated in controller architecture. Fuzzy logic controller is implemented and further optimized by FLC-GA hybridization. The comparative results indicate the minimum overshoot, settling time, peak time and minimum error in fuzzy GA hybridization in comparison with conventional and fuzzy logic controlled model. 6. References
[1] Bin-Da Liu, Chuen-Yau Chen and Ju-Ying Tsao, “Design of Adaptive Fuzzy Logic Controller
Based on Linguistic-Hedge Concepts and Genetic Algorithms,” IEEE Transactions On Systems, Man, And Cybernetics—Part B: Cybernetics, Vol. 31, No. 1, February 2001, pp. 32-53.
[2] Belkacem Mahdad, Tarek Bouktir and Kamel Srairi, “Optimal power Flow of the Algerian Network using Genetic Algorithms/Fuzzy Rules,” Power and Energy Society General Meeting - Conversion and Delivery of Electrical Energy in the 21st Century, 2008 IEEE, 20-24 July 2008, pp. 1-8
[3] Chu-Kuei Tu and Tseng-Hsien Lin, “Applying Genetic Algorithms On Fuzzy Logic System For Underwater Acoustic Signal Recognition,” Proceedings of the 2000 International Symposium on Underwater Technology, 2000, pp. 405-410
[4] Ching-Hung Wang, Tzung-Pei Hong, and Shian-Shyong Tseng, “Integrating Fuzzy Knowledge by Genetic Algorithms,” IEEE Transactions On Evolutionary Computation, Vol. 2, No. 4, November 1998, pp. 138-149.
[5] D. P. Kadam S. S. Wagh P. M. Patil, “Thermal Unit Commitment Problem by using Genetic Algorithms, Fuzzy Logic and Priority List Method,” International Conference on Computational Intelligence and Multimedia Applications 2007, Volume: 1, pp.468-472
[6] DePold, H., and Gass, F. D., “The Application of Expert Systems and Neural Networks to Gas Turbine Prognostics and Diagnostics,” Journal of EngineeringforGas Turbine andPower,Vol. 121,No. 4, 1999,pp. 607–612.
[7] Hyun-Joon Cho, Kwang-Bo Cho and Bo-Hyeun Wang, “Automatic rule generation using Genetic Algorithms for Fuzzy-PID hybrid control”, Proceedings of the 1996 IEEE International Symposium on Intelligent Control, 1996, 15-18 Sep 1996, pp. 271-276.
[8] Ilhan Aydin, Mehmet Karakose, Erhan Akin, “Artificial Immune Inspired Fault Detection Algorithm Based on Fuzzy Clustering and Genetic Algorithms Methods,” IEEE International Conference on Computational Intelligence for Measurement Systems And Applications - CIMSA 2008, Istanbul – Turkey , 14-16 July 2008, pp. 93-98
[9] J. Guo and S.H. Huang, “Control of an Autonomous Underwater Vehicle Testbed Using Fuzzy Logic and Genetic Algorithms,” Proceedings of the Symposium on Autonomous Underwater Vehicle Technology, Jun 1996, pp. 485 – 489.
[10] James M. Adams and Kuldip S. Rattan, “Genetic multi-stage Fuzzy PID controller with a Fuzzy switch”, IEEE Transactions on Systems, Man, and Cybernetics, 2001, Vol. 4, pp.2239-2244
[11] LI Shurong, WANG Feng, MA Tao and YAN Wei, “Genetic Algorithms based Fuzzy multi-objective nonlinear programming of regional water allocation”, IEEE Conference on Cybernetics and Intelligent Systems, 2008, 21-24 Sept. 2008, pp. 1353-1358
[12] Min Woong Hwang and Jin Young Choi, “Hybrid Feedforward and Feedback Control of Wafer Temperature in RTP Using Genetic Algorithms and Fuzzy Logic,” ICIPS '97. 1997 IEEE International Conference on Intelligent Processing Systems, 1997, Vol.1, pp.93-97.
[13] Merrington, G. L., “Fault Diagnosis in Gas Turbines Using a Model Based Technique,” American Society of Mechanical Engineers, ASME Paper 93-GT-13, 1993.
[14] Ranjan Ganguli, “Fuzzy Logic Intelligent System for Gas Turbine Module and System Fault Isolation”, Journal of Propulsion and Power, Vol.18, No. 2, March–April 2002.
[15] Raj Subbu, Arthur C. Sanderson and Piero P. Bonissone, “Fuzzy Logic Controlled Genetic Algorithms versus Tuned Genetic Algorithms: An Agile Manufacturing Application,” Proceedings of the Intelligent Control (ISIC), IEEE Joint Conference, 1998, pp.434-440.
[16] Rangaswamy, T.R. Shanmugam, J. Thyagarajan, “Fuzzy Controller for a Gas Turbine Plant”, IEEE International Conference on Industrial Technology, ICIT 2006, Dec. 2006, pp. 1252 – 1257.
138
An Efficient Fuzzy-GA Flow Control of Turbine Compressor System: A Process Control Case Study Rahul Malhotra, Narinder Singh, Yaduvir Singh
[17] S. H. Yakhchali and S. H. Ghodsypour, “A Hybrid Genetic Algorithms for Computing the Float of an Activity in Networks with Imprecise Durations”, Proceedings of the IEEE International Conference on Fuzzy Systems (FUZZ-2008), pp.1789-1794.
[18] S. Balamurugan, R. Joseph Xavier and A. Ebenezer Jeyakumar, “Control of Heavy-duty Gas Turbine Plants for Parallel Operation Using Soft Computing Techniques”, Electric Power Components and Systems, Volume 37, Issue 11, November 2009 , pp.1275 – 1287.
[19] Wen-Ruey Hwang and Wiley E. Thompson, “Design of Intelligent Fuzzy Logic Controllers Using Genetic Algorithms,” Proceedings of the Third IEEE Conference at IEEE World Congress on Computational Intelligence and Fuzzy Systems, 1994, 26-29 Jun 1994, vol.2, pp. 1383-1388.
[20] Yen, J., Laqngani, R., and Zadeh, L. A. (eds.), Industrial Applications of Fuzzy Logic and Intelligent Systems, IEEE Press, New York, 1995.
[21] C. C. Lee, “Fuzzy logic in control systems: fuzzy logic controller, part- I”, IEEE Trans. on Systems, Man and Cybernet, vol. 20, no. 2, pp. 404- 418, Mar./Apr. 1990.
[22] G.C.D. Sousa, and B. K. Bose, “A fuzzy set theory based control of a phase-controlled converter dc machine drive,” IEEE Trans. on Industry Applications, vol. 30, no. 1, pp. 34-44, Jan/Feb 1994.
[23] Xiao Yan Song, Qing Jie Yang, Xue Ming Zhang and Qi Gao Feng, “Application of Compound PID Control in the DC Servo Motor”, Journal of Applied Mechanics and Materials, Vol.16-19, 2009, pp.145-149.
Authors
Rahul Malhotra is currently pursuing Ph.D. degree from Punjab Technical University His area of interest includes Wireless Communication, Adhoc Networks, Fuzzy Logic & Genetic Algorithms. He is a member of Indian Society for Technical Education, The Institution of Electronics & Telecommunication Engineers (India), Institution of Engineers (India) E-mail: [email protected] Yaduvir Singh obtained Bachelor of Engineering from Dayalbagh Educational Institute (Deemed University, Agra) in Year 1991, Master of Engineering in Control & Instrumentation Engineering from Motilal Nehru National Institute of Technology, University of Allahabad in Year 1993, Master of Business Management from Newport University, USA in year 1997 and Doctor of Philosophy from Thapar University, Patiala in year 2004. He joined Thapar University as Assistant Professor in 2000. He is currently working as Associate Professor in the University.
E-mail: [email protected]
Narinder Singh has received his Bachelor of Engineering from Thapar Institute of Engineering and Technology, Patiala, India under Punjabi University in year 1964 and M. Tech degree from Indian Institute of Technology, Roorkee in 1968 and Ph.D degree from Indian Institute of Engineering, Roorkee in 1987. He served as a Professor in Thapar University, Patiala. Later, he joined Giani Zail Singh College of Engineering & Technology, Bathinda. He is currently working as Director in GGS College of Engineering & Technology,Talwandi sabo,Bathinda. His field of interest includes Surveying, Fuzzy Logic, and Genetic Algorithm optimization.
139





























