Embed Size (px)
Citation preview

J Heuristics (2015) 21:301–328DOI 10.1007/s10732-014-9259-9
An efficient decentralized clustering algorithmfor aggregation of noisy multi-mean data
Séamus Ó Buadhacháin · Gregory Provan
Received: 14 January 2014 / Revised: 11 June 2014 / Accepted: 2 August 2014 /Published online: 16 December 2014© Springer Science+Business Media New York 2014
Abstract We describe VarClust, a gossip-based decentralized clustering algorithmdesigned to support multi-mean decentralized aggregation in energy-constrained wire-less sensor networks. We empirically demonstrate that VarClust is at least as accurateas, and requires less node-to-node communication (and hence consumes less energy)than, a state-of-the-art aggregation approach, affinity propagation. This superiorityholds for both the clustering and aggregation phases of inference, and is demonstratedover a range of noise levels and for a range of random and small-world graph topolo-gies.
Keywords Decentralized aggregation · Decentralized clustering ·Wireless sensornetworks · Gossip-based algorithms
1 Introduction
A number of applications, such as environmental monitoring or military surveillance,entail measuring a range of values within a specified region. For example, we maycount the mean number of birds living within adjacent urban versus forested areas. Insuch an example, we can use a set of wireless sensors distributed within the monitoringregion to compute the mean numbers for the urban and forested areas. We refer to thistask of using a wireless sensor network (WSN) to compute a set of mean values througha decentralized communications protocol as decentralized aggregation.
Decentralized aggregation is an important technique in WSNs, and has been studiedwidely, e.g., Shrivastava et al. (2004); Sim et al. (2011). One key aspect of this taskis employing a communications protocol that uses little energy. A recent approach,
S. Ó. Buadhacháin (B) · G. ProvanMobile and Internet Systems Laboratory, University College Cork, Cork, Irelande-mail: [email protected]
123

302 S. Ó. Buadhacháin, G. Provan
Fig. 1 Limitations of gossip-based aggregation. A set of noisy observations from a bimodal distribution ais aggregated by unconstrained gossip into a unimodal distribution b that increases the overall system error.The application of a distance threshold to neighbour selection c mitigates the problem, but values close tothe boundary between regions are still oversmoothed
gossip (Chen et al. 2006), is particularly attractive in the domain of WSNs becauseof its low communication cost, which scales linearly with network size. However,default gossip-based aggregation algorithms suffer from a drawback arising from theunderlying assumption that all values held by sensor nodes are samples from the samemean. When nodes hold values sampling multiple distributions, this assumption isviolated. For example, returning to our example above, a single network might containnodes measuring urban and regional bird populations, regions likely to exhibit largedifferences, which the aggregated data should preserve. In cases such as these, gossiptends to oversmooth (Fig. 1a, b), producing results that estimate the single aggregatemean of all regions.
Because the spatial distance between wireless sensors is frequently correlated withvariation in the phenomena (such as temperature or luminance) that they are designedto measure, spatially-aware sensors can use distance thresholds to predict whethernetwork neighbours are likely to be measuring the same mean. This approach, however,requires that nodes are capable of at least relative (pairwise mutual) localization, andalso fails to prevent communication between uncorrelated neighbours at boundariesbetween regions (Fig. 1c). It also requires some a priori knowledge of the spatialvariation of the phenomenon of interest in order to set an appropriate threshold; thisinformation is not always available.
The issues with returning incorrect means and smoothing can be resolved by clus-tering nodes into groups with “similar” values. If nodes can be organized into clustersso that pairs of nodes only communicate if they are measuring values within the sameregion, then the problem of oversmoothing can be mitigated or avoided entirely. Werefer to the task of measuring multiple mean values of a phenomenon within differentregions of an environment as multi-mean aggregation.
A wide range of clustering approaches have been defined for WSNs; see,for exam-ple, the surveys in Boyinbode et al. (2011); Katiyar et al. (2010); Mitra and Nandy(2012). Our motivation, however, is substantially different from that of the majorityof WSN-focused clustering algorithms in the literature.
Algorithms such as LEACH (Heinzelman et al. 2000), EECS (Ye et al. 2005),and EEUC (Li et al. 2005) are designed principally to maximize a WSN’s lifetimeby bounding the communication between individual nodes and the sink, or base sta-tion. To this end they partition the network graph into independent clusters, within
123
Decentralized clustering algorithm 303
each of which a cluster head acts as the intermediary between subordinate nodesand the sink. We, on the other hand, are interested primarily in a partitioning ofthe network graph that maximizes the accuracy of data fusion while paying atten-tion to energy usage through data exchanges. We assume a WSN that is distrib-uted and self-organized and that nodes will locally carry out sensing, processing andtransmission operations in an autonomous, decentralized and unattended manner. Weassume a network structure where all nodes are peers, i.e., there are no “cluster-heads” assigned, and there is a single sink node that collects data from the sensornetwork.
One similarity-based clustering approach, affinity propagation (AP), is importantdue to its similar motivation, its ability to produce arbitrary numbers of clusters,its purely decentralized nature, and its claimed superiority to comparable cluster-ing algorithms (Frey and Dueck 2007). However, AP scales quadratically with net-work size (that is, it has O(n2) complexity), which militates against its applicationto energy-constrained WSNs without refinements that bound its scope (Zhang et al.2008; ElGammal and ElToweissy 2010).
In this article, we present VarClust, a decentralized, scalable, energy-efficientalgorithm that clusters nodes based on sensed-value similarity. In VarClust, eachnode uses purely local interactions to obtain an estimate of system variance, whichit then uses to decide whether to communicate with neighbours during aggregation.While it is not a hierarchical clustering algorithm, because it acts only to cut linksbetween clusters, VarClust in no way precludes the application of further, hierar-chical clustering methods to the clusters produced. Unlike clustering algorithms suchas k-means and EM, VarClust does not require a priori knowledge of the numberof clusters to be formed.
Finally, VarClust, because it is itself based on the generic gossip communicationsprotocol, scales linearly with network size, possessing �(n) complexity.
1.1 Contributions
Our contributions are as follows:
1. We propose a novel approach for WSN multi-mean aggregation, VarClust, thatis at least as accurate as competing algorithms, but which scales better and issignificantly more energy-efficient.
2. We show empirically that VarClust operates well on a range of graph topologiesand levels of sensor noise, both uniform and Gaussian.
3. We show empirically that VarClust has an accuracy on complete graphs that iscompetitive with a state-of-the art approach, AP, and that it outperforms AP onrandom graphs and small-world graphs characteristic of wireless sensor networktopologies.
4. We show that, while VarClust is specifically designed to support decentralizedaggregation and self-calibration in wireless sensor networks, it is a good general-purpose clustering algorithm in its own right.
123

304 S. Ó. Buadhacháin, G. Provan
1.2 Outline
The rest of this article proceeds as follows. In Sect. 2 we situate our contribution inrelation to the existing literature in the area. In Sects. 3 and 4, we explain the motivationfor designing VarClust and state the problem formally. In Sect. 5 we outline ouralgorithm and discuss its convergence and complexity; we discuss the competingaffinity propagation algorithm in Sect. 6. In Sects. 7, 8, and 9 we provide empiricalresults of VarClust’s performance in simulation, and in Sect. 10 we conclude withsome directions for future work.
2 Related work
Wireless sensor technology is a highly active and dynamic field of research; the surveysin Akyildiz et al. (2002); Willig et al. (2005); Willig (2008) provide good snapshotsof the changing state of the art in the last decade, with an emphasis on practicalconsiderations in industrial settings. Real-world deployments of wireless sensors forenvironmental monitoring are described in Szewczyk et al. (2004); Ramanathan et al.(2006); Barrenetxea et al. (2008).
The impracticality of manual calibration of large-scale sensor networks is discussedin Whitehouse and Culler (2002). Automated calibration has been studied in a num-ber of contexts, including localization (Whitehouse and Culler 2002; Taylor et al.2006), time synchronization (Elson and Estrin 2001), and motion estimation (Welchand Bishop 1997). Dense deployments have been exploited to perform calibration(Bychkovskiy et al. 2003). Methods for automatic calibration which exploit condi-tions where the mean value of the phenomenon is constant or known are described inBalzano and Nowak (2007); Ramakrishnan et al. (2011).
This paper compares a novel clustering algorithm to a well-known algorithm byFrey and Dueck (2007), the affinity propagation (AP) approach. AP has been appliedto many domains, including sensor networks (ElGammal and ElToweissy 2010), togood effect. AP clusters data by identifying a subset of representative exemplars,using an approach based on randomly choosing an initial subset S of data points, andthen iteratively refining S. A number of extensions and refinements to AP have beenproposed, including hierarchical (Givoni et al. 2011) and multi-exemplar (Wang et al.2013) approaches. Weighted AP and data-stream-based AP (Zhang et al. 2008, 2013)address the quadratic complexity of AP by identifying and aggregating duplicates andrestricting the frequency with which the set of exemplars is calculated (although theunderlying algorithm remains quadratic in complexity). In our experimental evaluation(Sects. 8–9), we compare AP to our approach, and then extend AP to better clusternodes within the context of our WSN-specific needs.
Our approach is based on gossip algorithms. A good introduction to the generaltopic of gossip and epidemic models in distributed systems is given in Eugster etal. (2004). The use of gossip-based communication to compute aggregate informationfrom values shared among a large network is described in Kempe et al. (2007); Jelasityet al. (2005). Gossip has been used widely in WSN applications, e.g., Chen et al. (2006);Dimakis et al. (2006); Chen et al. (2013). The tasks of WSN self-calibration and fault
123
Decentralized clustering algorithm 305
detection, for example, become scalable to large networks through the application ofgossip-based aggregation methods (Provan and Ó Buadhacháin 2012; Ó Buadhacháinand Provan 2013).
Our algorithm is based specifically on the generic aggregation algorithm Newscast,described in Jelasity et al. (2005). In Newscast, nodes in a network listen continuouslyfor messages from neighbours while themselves periodically initiating communica-tion, performing some defined update behaviour in response to the receipt of newinformation. The principal novelty of our approach with respect to Newscast is thatwe interleave two simultaneous mean-aggregation tasks (i.e., E[x] and E[x2]) with abinary decision-making step (the clustering step) that iteratively improves in accuracywith the aggregation.
As well as random graphs, we employ Watts–Strogatz network generators (Wattsand Strogatz 1998) to create networks for testing our clustering algorithms. Watts–Strogatz generators have been employed in a number of previous WSN papers, e.g.,Guidoni et al. (2010); Helmy (2003); Qi et al. (2011); Wang et al. (2007); Sharmaand Mazumdar (2005). The use of these generators has been shown to create syn-thetic WSNs that mimic several classes of real-world WSNs (Hayashi 2006), and,more importantly, have a number of desirable real-world characteristics. For example,Sharma and Mazumdar (2005) show that explicitly introducing network short-cuts (toreduce the average hop count of the network) results in (a) reduced energy dissipationper node, (b) increased uniformity in energy dissipation across the sensor node, and(c) increased network lifetime.
3 Motivation
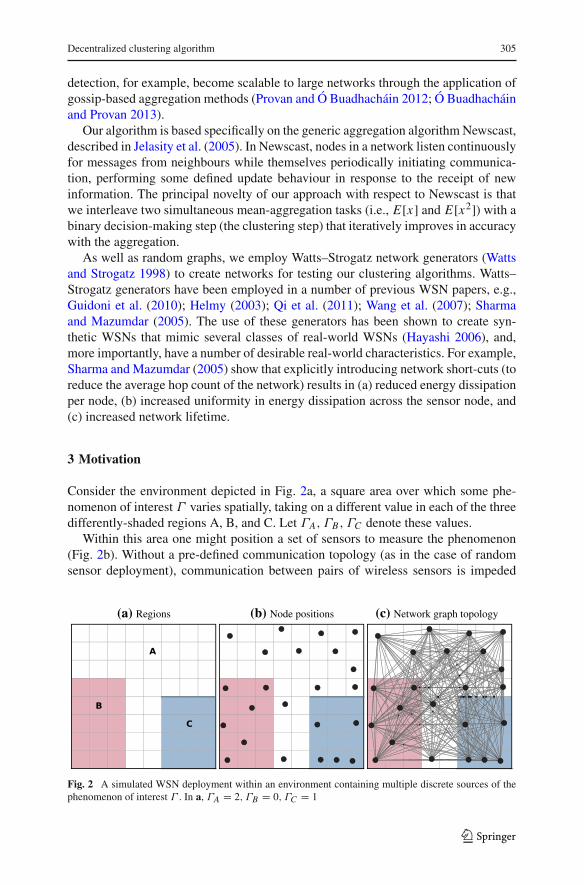
Consider the environment depicted in Fig. 2a, a square area over which some phe-nomenon of interest Γ varies spatially, taking on a different value in each of the threedifferently-shaded regions A, B, and C. Let ΓA, ΓB, ΓC denote these values.
Within this area one might position a set of sensors to measure the phenomenon(Fig. 2b). Without a pre-defined communication topology (as in the case of randomsensor deployment), communication between pairs of wireless sensors is impeded
(a) Regions (b) Node positions (c) Network graph topology
Fig. 2 A simulated WSN deployment within an environment containing multiple discrete sources of thephenomenon of interest Γ . In a, ΓA = 2, ΓB = 0, ΓC = 1
123

306 S. Ó. Buadhacháin, G. Provan
(a) VarClust (b) AP (c) AP-R
Fig. 3 Network partitions formed by clustering noise-free sensor values; i.e., γi = Γi ∀ i ∈ V
(a) VarClust (b) AP (c) AP-R
Fig. 4 Partitions formed by clustering when each sensor is affected by sensor noise δ ∈ U (−0.1, 0.1), sothat for all i, γi = Γi + δ
only by physical distance and other environmental factors (for example, walls or otherphysical boundaries) that inhibit signal propagation. If the environment is sufficientlysmall (or nodes’ communication range sufficiently large), and no such inhibiting fac-tors are present, then every sensor is within mutual communication reach of everyother sensor, and the communication topology forms a complete graph (Fig. 2c). 1
Because wireless sensors tend to give noisy readings (Willig et al. 2005; Willig2008), it is likely that the values measured by the sensors in a given region x differ fromΓx , following some distribution δ. If δ is zero-mean, it follows that the mean value of allsensors in region x should more closely approximate Γx than any individual sensor’svalue. This is the motivating principle behind gossip-based aggregation (Fig. 3).
The problem is that, given a complete communication graph such as in Fig. 2c, meanaggregation over all sensors in regions A, B, and C will converge on {ΓA, ΓB, ΓC },which is likely to exacerbate, rather than mitigate, system error. 2 This is the problemillustrated by Fig. 1b. We would therefore like to cut edges in the graph so that sensorsin region A communicate and aggregate only with other sensors in region A, and so on,
1 We consider this to be a worst-case scenario, in which the physical properties of the environment beingsensed can play no role in the inference of a sensible communication topology.2 We exclude the pathological case in which system noise is greater than the variance of Γ .
123

Decentralized clustering algorithm 307
allowing us to perform aggregation over clusters of the original communication graphthat converge on the correct values. We consider the situation where the boundariesof regions A, B, and C are not known, and either nodes are not capable of relativelocalization or relative localization alone is not guaranteed to be helpful in determiningregion boundaries (for example, non-convex regions) (Fig. 4).
4 Problem statement
Our problem decomposes naturally into two sub-problems: (a) the accurate aggrega-tion of multiple means; and (b) the generation of a clustering that supports this aggrega-tion. Our first sub-problem is of the greater importance in the context of decentralizedaggregation; the second can be generalized as a similarity-based clustering problem.We define two objective functions to assess these sub-problems below. Although ourchief interest is accuracy, we further define a third objective function based on enu-merating messages exchanged between nodes, which we use as a proxy for energyconsumption.
We describe a wireless sensor network W in terms of a set of n sensors distributedin a bounded field F in which some measurable phenomenon varies spatially. Thenetwork topology can be represented as an undirected graph G(V, E) where V denotesthe set of vertices, which correspond to network nodes, and E ⊆ V × V is a set ofbidirectional edges, where the edge {i, j} = { j, i} connects vertices i and j , and{i, j} ∈ E if and only if the nodes denoted by i and j are capable of communicationin the represented network.
4.1 Assumptions
Because VarClust is a novel algorithm, we do not attempt to consider all the proper-ties of real-world WSNs. We consider a restricted application domain by imposing thefollowing assumptions. (We discuss the implications of relaxing these assumptions inSect. 10).
1. All sensor nodes in W are homogeneous, i.e., they have the same sensing andcommunication capability, and have the same initial energy supply.
2. Each node provides a reading of some real-valued phenomenon of interest that issubject to random error. The distribution of error over all nodes in the network iszero-mean. We do not consider non-random error (e.g., calibration bias) in thispaper.
3. Communication links are bidirectional and deterministic. That is, if node i cansuccessfully send a message to node j , then j can successfully send to i ; either ican always successfully send to j , or it never can.
4. A data logging application is used by all active nodes to generate data at a fixedrate (in bit/s).
5. Nodes are capable of some limited time synchronization. We assume that thereexists some time period τ , which may be large, during which every node is guar-anteed to schedule exactly one action.
123

308 S. Ó. Buadhacháin, G. Provan
6. Each node is assigned a permanent, unique identifier. A node that identifies itselfas j will always identify itself as j .
7. There exists some out-of-band mechanism for neighbour discovery; nodes areaware of their neighbours before clustering begins.
4.2 Accuracy
We consider accuracy in terms of accuracy of aggregation and accuracy of clusteringdecisions, as defined below.
4.2.1 Aggregation
We define the WSN aggregation objective purely in terms of most accurately estimatingthe outputs of the sensors. Given a set of measurements yi , collected by node i , fori = 1, · · · , n, we want to define a decentralized algorithm that (a) enables every nodeto compute a locally global-optimum function of the measurements y∗, (b) does notrequire the presence of a sink node, and (c) uses only interactions among nearby nodes.A standard example of this, addressed commonly in the literature, e.g., Bychkovskiyet al. (2003), is the case where y∗ is the average of the measurements. Computingthe average output of the WSN consists of minimising the disagreement between theyi , i = 1, . . . , n. If we define an abstract disagreement function Δ(V ′) over V ′ ⊆ V ,our objective is to compute a set of measurement estimates yi , i = 1, . . . , n thatminimise Δ(V ). For our example of mean estimation, choosing yi = y, i = 1, . . . , n,where y is the global mean, is the optimal choice.
We use mean squared error (MSE) as our metric for the accuracy of mean aggre-gation after clustering, where
MSE(V ) =∑
i∈V
(yi − y∗i
)2
|V | . (1)
4.2.2 Clustering
We are interested in situations where the phenomenon in F has multiple mean values.In such a case, we will aim to compute a set of mean estimates y j , j = 1, . . . , l ≤ n.From the perspective of W , we will cluster the nodes in W into a collection of subsetsV ′j , j = 1, . . . , l such that V ′j ⊆ V ∀ j = 1, . . . , l and subset V ′j estimates mean y j .A clustering of W into l clusters is a partition of the nodes of W such that:
V ′j �= ∅, j = 1, . . . , l ,⋃
j V ′j = V, j = 1, . . . , l ,
V ′j ∩ V ′k = ∅,∀ j, k = 1, . . . , l.
We will measure the accuracy of different clustering algorithms according to the“optimal” cluster as found by an oracle, which returns a collection of sub-graphsG∗ = G∗j (V ∗j , E∗j ), j = 1, . . . , l, such that:
123

Decentralized clustering algorithm 309
V ∗j �= ∅, j = 1, . . . , l ,⋃
j
V ∗j = V, j = 1, . . . , l ,
V ∗j ∩ V ∗k = ∅, ∀ j, k = 1, . . . , l ,⋃
j
E∗j ⊆ E∗, j = 1, . . . , l.
We measure the accuracy of a cluster returned by an algorithm in terms of theability to find all edges present in G∗ (true positives) and not include any edges absentin G∗ (false positives). We measure false positives using the edge-complement, i.e.,given a graph G(V, E) and a complete graph E = V × V , the edge-complement isEC = E \ E . Our accuracy function is given by:
J = |E∗ ∩ E | + |E∗C ∩ EC ||E∗| + |E∗C |
. (2)
J ∈ [0, 1] and J = 1 denotes perfect accuracy.
4.3 Energy consumption
We adopt a simplified version of the energy model of Singh et al. (2010), who assumethat the energy consumption of the sensor is due to data transmission and reception,since other energy costs are dwarfed by these costs. We simplify their approach byassigning unit cost to each message sent and received in the network. Hence, wedefine our energy consumption objective function in terms of the number of messagesexchanged between nodes during an algorithm’s execution. Given the function
m(i, j) ={
1, if i sends to j,0, otherwise,
we attempt to minimize the objective function
K =∑
i∈V
∑
j∈V
m (i, j) . (3)
5 Our approach: VarClust
Our approach to this task is based on the assumption that, up to a point, the value heldby each node in a multi-mean network is closer to the values held by nodes estimatingthe same mean than it is to those values held by nodes estimating other means. Thatis, returning to the example above, we assume that the difference between ΓA andΓB , relative to the system noise δ, is sufficiently large that, for any two nodes i and jestimating ΓA, and any node k estimating ΓB ,
123

310 S. Ó. Buadhacháin, G. Provan
|yi − y j | < min(|yi − yk |, |y j − yk |
).
From this it follows that a threshold ε may be defined such that if |yi−y j | > ε then iand j are assumed to be in different regions. Given some domain-dependent knowledgeof the scale of the phenomenon being measured, it would be straightforward in manycases to select an appropriate value for ε. If, for example, some phenomenon x in anenvironment were known to take on values in the range [100, 102], then ε = 101 mightbe an appropriate threshold (depending on the degree to which noisy estimates tendedto diverge from their mean). When this kind of knowledge is not available, however,it is necessary to attempt to infer a sensible threshold from the data themselves.
VarClust exploits the fact that the variance of a random variable x is the secondcentral moment: i.e., Var[x] = E[x2]− (E[x])2. By simultaneously computing aggre-gate local estimates of both y and y2, each node can compute an accurate estimate ofthe variance. Through local interactions, each node iteratively computes a more accu-rate estimate of system variance, while using its current estimate to determine whetherthe neighbour with which it is communicating should form part of its neighbourhoodduring a subsequent aggregation process.
Algorithm 1 VarClustInitialization
for all q ∈ neighbours(p) doCq ← F
end forωp ← yp
ω2p ←
(yp
)2
vp ← ω2p −
(ωp
)2
Gossip-based variance aggregation
function update(p,⟨yq , ωq , ω2
q
⟩)
ωp ← (ωp + ωq )/ 2ω2
p ← (ω2p + ω2
q )/ 2
vp ← ω2p − (ωp)2
if∣∣yp − yq
∣∣ ≤ vp then
C p[q] ← Telse
C p[q] ← Fend if
end function(a) active thread
do exactly once during each time period τ
q ← randomly-chosen neighbour of p
send⟨yp, ωp, ω2
p
⟩to q
⟨yq , ωq , ω2
q
⟩← receive(q)
update(p,⟨yq , ωq , ω2
q
⟩)
(b) passive thread
do forever⟨yq , ωq , ω2
q
⟩← receive(∗)
q ← sender(⟨
yq , ωq , ω2q
⟩)
send⟨yp, ωp, ω2
p
⟩to q
update(p,⟨yq , ωq , ω2
q
⟩)
123

Decentralized clustering algorithm 311
VarClust (Algorithm 1) is based on the generic push-pull algorithm (Jelasity etal. 2005). Throughout some predefined time period τ , all nodes in a network listen formessages sent by their neighbours. At a random point during τ , each node p selects one
of its network neighbours q and sends a message comprising the triple⟨yp, ωp, ω
2p
⟩,
where yp is p’s local estimate of the phenomenon of interest, ωp is its local estimate ofthe global mean of all estimates, and ω2
p is its local estimate of the square of the globalmean. A node responds to a received message by sending its own triple of estimates,after which it updates its estimates using the contents of the received message.
Each node is initialized with a mapping C of neighbouring nodes to Boolean values,all of which are initially false. After receiving a message from a neighbour q andupdating its estimates, p compares its variance estimate with the absolute differenceof its own measurement and q’s, and uses the result of this comparison to determine avalue for Cq , which represents its decision, at the end of the current iteration, to eitherpreserve or cut the edge {p, q}.
5.1 Convergence
As gossip repeats over cycles k = 1, 2, . . ., each node’s local estimates ωi and ω2i
converge monotonically as follows:
limk→∞ωp = {yi ∀ i ∈ V },
limk→∞ω2
p ={(yi )
2 ∀ i ∈ V}.
Theoretical proof of this convergence is given in Jelasity et al. (2005); it may beparaphrased as follows.
Let Vark[ω] be the variance of the set of local estimates of random variable ω heldby the nodes V in a gossip network after gossip cycle k. Let i be the node holding theminimum estimate of ω, i.e., i = argminx∈V (ωx ). Either
1. all neighbours of i hold a local estimate equal to ωi ; or2. i has at least one neighbour, j , whose local estimate is greater than ωi , with which
there is a non-zero probability that i will exchange estimates during cycle k + 1.
In case 1, ωi is guaranteed to be non-decreasing during cycle k + 1; in case 2, it willincrease if i communicates with j .
Likewise, the node holding the maximum estimate, i ′ = argmaxx∈V (ωx ), musthave either only neighbours with local estimates equal to ωi ′ (in which case ωi ′ isnon-increasing) or at least one neighbour j ′ such that ω j ′ < ωi ′, with whom there isa non-zero probability that i ′ will exchange messages in cycle k + 1 (in which caseωi ′ will decrease).
Since the extrema of ωi are guaranteed not to diverge, Var [ω] is at least non-increasing in successive cycles k, k+ 1, . . .. Figure 5 presents results that empiricallydemonstrate the typical convergence of gossip-based algorithms.
The convergence of gossip to the true global mean depends on the connectednessof the network graph. If the graph comprises one or more mutually disconnected
123

312 S. Ó. Buadhacháin, G. Provan
0.0
0.1
0.2
0.3
0 25 50 75 100
Cycle
Var
ianc
e
Fig. 5 Convergence of gossip-based algorithms is typically exponential. Here, each node in a network of1,000 nodes is initially assigned a value uniformly distributed between −1 and 1, and the variance of localestimates is plotted after each of 100 cycles of gossip
subgraphs, each subgraph will converge on an independent mean. This follows triviallyfrom the observation that any two components in the graph with no edge between themcannot communicate.
5.2 Termination
In theory, VarClust may be pre-defined to terminate when every node’s local estimatechanges between cycles by less than some value ε, requiring some additional protocolto detect this. However, because the rate of convergence of gossip-based aggregationalgorithms depends only on neighbour selection (where random selection, as in Var-Clust, is optimal), it is possible to achieve good results simply by stopping after somefixed number of cycles (Jelasity et al. 2005; Rahimian et al. 2012).
5.3 Complexity
The communications complexity of VarClust is �(n). In each iteration, every nodesends an average of two messages: one unsolicited request to a neighbour, and oneresponse to a neighbour’s request. Overall, exactly 2n messages are sent during eachcycle.
6 Affinity propagation
Affinity-propagation (AP) is an exemplar-based clustering algorithm. The algorithmis described in Frey and Dueck (2007); our implementation, tailored to support gossip-based aggregation, is outlined in Algorithm 2. AP is an interesting point of comparisonto VarClust: it is a completely decentralized similarity-based clustering algorithmwith applications to clustering in WSNs (ElGammal and ElToweissy 2010) and highclaimed accuracy in comparison with other similar algorithms.
123

Decentralized clustering algorithm 313
Algorithm 2 Affinity propagationfunction update- r(p) � Update responsibilities
Q ← N (p) ∪ pfor all q ∈ Q do
r(p, q)← s(p, q)− maxk∈Q\{q}
{a(p, k)+ s(p, k)
}
end forend function
function update- a(p) � Update availabilitiesa(p, p)←
∑
k �=p
max{0, r(k, p)}
for all q ∈ N (p) do
a(p, q)← min{
0, r(q, q)+∑
k∈N (p)\{q}max {0, r(p, k)}
}
end forend function
for all p do � Initializea(p, p)← r(p, p)← 0for all q ∈ N (p) do
s(p, q)← s(q, p)←− (yp − yq
)2
r(p, q)← r(q, p)← s(p, q)
end forend for
repeat � Iteratively update responsibilities and availabilitiesfor all p do
update- r(p)
end forfor all p do
update- a(p)
end foruntil termination conditions met
for all p do � Choose exemplarexemplar(p)← argmaxq∈N (p) r(p, q)
end for
for all p do � Cut edgesfor all q ∈ N (p) do
if q �= exemplar(p) ∧ p �= exemplar(q) thenremove q from N (p)
end ifend for
end for
The underlying principle is that some member of a neighbourhood of nodes canserve as an exemplar for that neighbourhood by virtue of its similarity to the othermembers, similarity here being defined as some real-valued metrical distance betweenthe data points held by some pair of nodes p and q. During AP, each iteratively refinetheir relationship with its neighbours with respect to notions of responsibility andavailability. Node q is responsible for a neighbour p to the extent that p believes q to
123

314 S. Ó. Buadhacháin, G. Provan
be a good exemplar; while q is available to p to the extent that it believes itself to bea good exemplar for p (which depends on q’s inferred responsibility for other nodesin its neighbourhood).
AP is completely decentralized by design and produces good clusterings on certainwell-known data sets. It is, however, somewhat dependent on a priori knowledge of thedata; each node p must be initialized with an estimate of self-similarity, which stronglyaffects its propensity to form clusters with other nodes. (We discuss our response tothis requirement in Sect. 7, below.)
Furthermore, since each iteration of AP requires that each node contact every oneof its neighbours twice (once to update responsibilities, once to update availabilities),it has O(n2) complexity. This rapidly becomes intractable on large complete networktopologies, particularly in communications-constrained networks such as WSNs.
7 Experimental setup
Our simulated networks are modelled as undirected graphs generated using the PythonNetworkX library (Hagberg et al. 2008). To compare VarClust’s performance withexisting decentralized clustering algorithms, we run an implementation of affinitypropagation (AP). When invoking AP, we use initial self-similarity s(k, k) = 0.
Below, we first describe the characteristics of the graphs generated, then outlineour criteria for evaluating accuracy (Sect. 7.2) and energy consumption (Sect. 7.3).
7.1 Graphs
Nodes are divided at random into two equally-sized classes, A and B, and each nodei is assigned a value
yi = ν +{
0, if i ∈ A,
1, if i ∈ B,(4)
where ν is a noise term and the accurate measurement y∗ is 0 for all nodes in class Aand 1 for all nodes in B.
7.1.1 Graph topologies and generators
We evaluate VarClust’s performance on Erdos–Rényi random graph (Erdos andRényi 1960) and small-world, or Watts–Strogatz, graph topologies (Watts and Strogatz1998).
An Erdos–Rényi graph is generated with parameters n and p. A graph is createdwith n nodes and no edges; then, each pair of nodes {u, v} is connected by an edgewith probability p. A Watts–Strogatz generator has parameters n, k, p and operatesas follows.
1. It starts with a ring of n nodes, where each node is connected to its k nearestneighbours in the ring (k/2 on each side, which means k must be even).
123

Decentralized clustering algorithm 315
(a) (b)
Fig. 6 Distributions of y for two clusters A and B given conditions of a uniform and b Gaussian noise
2. For each node ni of the ring (in order following the ring), it “rewires” each edge inci-dent on ni , by reconnecting it with a randomly chosen node, with a probability p.
All graphs in our experiments are connected; to ensure this we test each graph forconnectedness when it is generated and restart the generator if the graph fails this test.When generating Erdos–Rényi graphs, we restrict p ≥ ln n
n , since graphs generatedwith smaller p are almost surely not connected (Erdos and Rényi 1960).
Erdos–Rényi graphs represent a generalization of the spatially-thresholded topolo-gies of unmanaged WSNs, where (excluding environmental factors) nodes’ connec-tivity tends to be correlated with spatial distance. Rather than explicitly embed ourgenerated graphs in simulated 2-space, we can use the generation parameter p (whichcontrols nodes’ average degree) as a proxy for this. This affords us a controlled wayof examining the effect of network density on our clustering algorithms.
We employ Watts–Strogatz graphs because (as mentioned in Sect. 2) they both sharecharacteristics with real-world networks and exhibit desirable real-world propertiesthat make them appropriate for use as a topology overlay in network management.
7.1.2 Sensor noise
We are interested in the effect that different levels and kinds of sensor noise mayhave on our algorithm. We therefore consider two types of zero-mean noise: uniform,where ν = U (−δ, δ) (Fig. 6a), and Gaussian, where ν = N (0, σ ) (Fig. 6b). Wereport results for noise in the ranges 0 ≤ δ ≤ 1 and 0 ≤ σ ≤ 1.
7.2 Accuracy
We further distinguish between the accuracy of (1) aggregation performed on clusteredgraphs and that of (2) the clustering decisions, as we describe below.
123

316 S. Ó. Buadhacháin, G. Provan
7.2.1 Aggregation
To measure accuracy of aggregation, we first produce clusterings using VarClustand AP, then run a simple gossip-based averaging algorithm (Algorithm 3) over theclusters. We evaluate the produced averages by computing the global MSE of the localestimates (Eq. 1), given perfect knowledge of each node’s classification (Eq. 4).
Algorithm 3 Simple gossip-based mean aggregationdo exactly once during each time period τ
q ← randomly-chosen neighbour of psend yp to qyq ← receive(q)
yp ←(yp + yq
)/2
do foreveryq ← receive(∗)q ← sender(yq )
send yp to qyp ←
(yp + yq
)/2
7.2.2 Clustering
To measure the accuracy of clusters, we first run both algorithms over our generatedgraphs and then evaluate the edge-set using our accuracy function J (Eq. 2). Toreiterate: J is constrained to [0, 1]. J = 1, denoting perfect accuracy, if all initially-existing edges between nodes in the same class have been preserved during clusteringand all initially-existing edges between nodes of different classes have been pruned.Lower values of J can mean either that an algorithm is excessively pruning goodedges or preserving bad edges, or both. To investigate this further, we measure thetrue-positive rate (i.e., the number of good edges preserved by a clustering) and thefalse-positive rate (the number of bad edges preserved).
For Erdos–Rényi graphs, we measure J with respect to increasing mean networkdegree p over a range of noise values δ and σ . To further examine the impact of noisevalues, we show results for increasing noise over complete graphs (i.e., Erdos–Rényiwith p = 1).
For Watts-Strogatz graphs, we generate W-S graphs with initial ring degree k =2, 4, 6, 8 and rewiring probability p = 0, 0.1, . . . , 1.
7.3 Energy consumption
We enumerate exchanged messages as a proxy for measuring energy consumption(Eq. 3). We measure energy with respect to changes in n for complete graphs, andwith respect to n, k, and p, for W-S graphs.
8 Experimental results: accuracy
8.1 Aggregation
Our figures in this section (Figs. 7–11) plot MSE of aggregation after clustering. Wefirst run each clustering algorithm to completion. Then we use the clusters produced
123

Decentralized clustering algorithm 317
Fig. 7 Accuracy of aggregation on Erdos–Rényi graphs of 100 nodes with generation parameter p =0.1, 0.2, . . . , 1 and uniform noise δ = 0.1, 0.2, . . . , 1
Fig. 8 Accuracy of aggregation on Erdos–Rényi graphs of 100 nodes with generation parameter p =0.1, 0.2, . . . , 1 and Gaussian noise σ = 0.1, 0.2, . . . , 1
as an overly topology, over which we perform gossip-based mean aggregation. Wediscuss results for Erdos–Rényi and Watts–Strogatz graphs separately.
Figures 7 and 8 plot MSE for Erdos–Rényi graphs of 100 nodes under conditionsof uniform and Gaussian noise, respectively. We note the following.
Under conditions of uniform noise (Fig. 7), VarClust reliably outperforms AP.Beyond δ > 0.7, however, VarClust begins to perform worse, and increasinglypoorly with increasing initial degree p. We demonstrate this phase transition in furtherdetail in Figure 9a, which reports results on initially complete graphs (that is, Erdos–Rényi graphs generated with p = 1) specifically.
At high levels of noise, the the two clusters are sufficiently admixed with respect tosystem variance that variance alone is no longer a sufficiently tight threshold. Edgesbetween outlying members of different regions are increasingly likely to be preserved,eventually creating a single component. Because of the convergence guarantees ofgossip-based aggregation over connected graphs, even a single edge between clustersis sufficient to ensure that gossip over the component will converge on the mean of alllocal estimates (which result is plotted in Figure 9a as ‘none’). This contaminates theresulting aggregation and causes a sharp increase in error.
123

318 S. Ó. Buadhacháin, G. Provan
(a)
(b)
Fig. 9 Accuracy of aggregation on complete graphs with (a) uniform system noise δ = {0, 0.1, . . . , 1}and (b) Gaussian noise σ = {0, 0.05, 0.1, . . . , 1}
Performance under Gaussian noise conditions is somewhat different (Fig. 8). Atlow and high values of σ , VarClust improves in accuracy with mean network degreep (and outperforms AP). At intermediate noise levels, however, VarClust tends toperform poorly. This effect is demonstrated by Fig. 9b, which shows the sinusoidalincrease in MSE for VarClust as σ increases; error for AP increases exponentially(as in Fig. 9a).
123

Decentralized clustering algorithm 319
Fig. 10 Accuracy of aggregation on Watts-Strogatz graphs of 100 nodes with generation parametersk = 2, 4, 6, 8 (rows) and p = 0, 0.2, 0.4, 0.8 (columns), with respect to increasing δ in uniform noisedistributions
Results for Watts–Strogatz graphs are plotted in Figs. 10 and 11. Both show theMSE for increasing levels of sensor noise over discrete values of rewiring probabilityp for initial ring degree k = {2, 4, 6, 8}, under conditions of uniform (Fig. 10) andGaussian (Fig. 11) noise.
For both types of sensor noise, system error increases monotonically with the noiselevel. VarClust performs, in general, VarClust is most sensitive to generationparameter k. As the initial ring degree increases (and consequently, the more stronglyconnected the initial graph), the more strongly the algorithm exhibits a phase transitionat δ � 0.7: compare the results for (k = 2, p = 0.8), for example, with those for(k = 8, p = 0.8).
8.2 Clustering accuracy
Our second set of experiments evaluates the accuracy of clusterings produced by Var-Clust (Eq. 2); that is, the ratio of the sum of true positives (initial edges between nodesin the same region preserved during clustering) and true negatives (edges betweennodes in different regions that are removed during clustering) to all positives andnegatives.
Results for Erdos–Rényi graphs for varying levels of system noise are plotted inFigs. 12 and 13a. Both algorithms are largely insensitive to average network degree
123

320 S. Ó. Buadhacháin, G. Provan
Fig. 11 Accuracy of aggregation on Watts–Strogatz graphs of 100 nodes with generation parametersk = 2, 4, 6, 8 (rows) and p = 0, 0.2, 0.4, 0.8 (columns), with respect to increasing σ in Gaussian noisedistributions
(a)
(b)
Fig. 12 Clustering accuracy for VarClust and AP on Erdos–Rényi graphs with a uniform and b Gaussiannoise
p (Fig. 12); their performance is strongly correlated with the level of system noise(Fig. 13a).
We note that AP tends to perform poorly. We attribute this to a tendency to formmany small clusters (including clusters of order 1) on strongly-connected graphs
123

Decentralized clustering algorithm 321
(a) (b) (c)
Fig. 13 Clustering accuracy for VarClust and AP on complete graphs, under conditions of uniform(upper row) and Gaussian (lower row) noise. Subplot a presents our accuracy metric J ; subplots b and cpresent the true positive rate and false positive rate, respectively
without sensible a priori parameters for clustering affinity. Figures 13b and c sup-port this. Figure 13b plots the true positive rate (i.e., the number of edges betweennodes in the same class that are preserved when clustering terminates); for VarClustthis declines gradually as system noise increases, while for AP it rapidly drops to 0.Figure 13c shows that the false positive rate (i.e., the number of edges between nodesof different classes that are preserved when clustering terminates) increases for Var-Clust as δ increases while remaining constant at 0 for AP. These combined resultsexplain the change in J demonstrated in Fig. 13a and supports our intuition aboutAP’s performance.
Results for Watts–Strogatz graphs are plotted in Figs. 14 and 15. We observe thatVarClust consistently outperforms AP irrespective of graph generation parametersand system noise. System noise affects the overall accuracy of both algorithms (com-pare, for example, results for δ = 0, k = 2 and for δ = 1, k = 2). Beyond this, wenote that both algorithms are largely insensitive to k, meaning that clustering accu-racy is apparently not dependent on node degree; increasing p improves accuracy forboth.
9 Experimental results: energy
We have empirically studied energy expenditure for both complete and Watts–Strogatz graphs. We treat complete graphs as an exemplar of Erdos–Rényi graphs’behaviour in general; energy consumption is directly correlated with networkdegree.
123

322 S. Ó. Buadhacháin, G. Provan
Fig. 14 Clustering accuracy for VarClust and AP on Watts–Strogatz graphs of 100 nodes with uni-form noise. Each row presents results for graphs generated with parameters k = {2, 4, 6, 8} overp = {0, 0.1, . . . , 1}, given varying initial system noise conditions δ
9.1 Complete graphs
Because complete graphs have deterministic connectivity (that is, a complete graphof n nodes contains n(n − 1) edges), it is possible to derive the behaviour of ouralgorithms analytically. The key property of these graphs is the system-wide sum ofmessages exchanged (denoted by M ). Note that in AP, each node contacts every oneof its neighbours twice, so MAP = O(|E |), whereas in VC, MV C = O(|V |). Hencefor a complete graph, which has 1/2n(n−1) edges, MAP = O(n2) and MV C = O(n).Figure 16 plots M for VarClust and AP for complete graphs of increasing order,demonstrating VarClust and AP’s respective complexities.
123

Decentralized clustering algorithm 323
Fig. 15 Clustering accuracy for VarClust and AP on Watts–Strogatz graphs of 100 nodes withGaussian noise. Each row presents results for graphs generated with parameters k = {2, 4, 6, 8} overp = {0, 0.1, . . . , 1}, given varying initial system noise conditions σ
9.2 Watts–Strogatz graphs
For Watts–Strogatz graphs, we can also make analytical predictions, which we thenverify empirically. We note that |E | = nk/2 and |V | = n in a Watts–Strogatz graph.
Given the three Watts–Strogatz graph parameters, (n, k, p), their effect on M is asfollows.
– Increasing n while keeping (k, p) fixed results in a proportional increase of |E | =nk/2 and |V | = n in a Watts–Strogatz graph.
123

324 S. Ó. Buadhacháin, G. Provan
Fig. 16 Energy consumption, in terms of messages exchanged between nodes, for complete graphs withn = 5, 10, . . . , 500 for VarClust and AP
– Increasing k while keeping (n, p) fixed results in a proportional increase of |E | =nk/2 and |V | = n in a Watts–Strogatz graph.
– Varying p while keeping (k, n) fixed does not affect |V | or |E |, so M is unaffectedby changes in p.
Figure 17a plots M in a single iteration of AP and VC as n increases from 5 to500, where k = 2 and p = 0.2. We see that AP and VarClust increase linearly, withAP exhibiting a steeper slope of increase.
The upper sub-plot plots M against n, and the lower M against |E |. Both AP andVC show a linear increase w.r.t n when k is constant. Figure 17b plots M againstk = 2, 4, . . . , 50 on a graph with n = 500 and p = 0.2. In these figures, 1. Inthis figure, VarClust remains constant while AP increases linearly with k (i.e., initialdegree).
We can interpret the results as follows.
– A Watts–Strogatz undirected graph with generation parameters has (nk)/2 edges,and each node has k/2 neighbours. So as n increases linearly, AP’s complexityshould increase linearly: even though the graph’s size is increasing, the number ofmessages sent by each node remains constant, since it has a constant number ofneighbours. The number of messages sent using VC increases linearly too, sincethere are more nodes, each sending exactly 2 messages.
– As k increases linearly on graphs generated with constant n, each node’s neigh-bourhood increases. VC’s complexity is constant; every node sends exactly 2messages, regardless of neighbourhood size. AP increases linearly with k, sinceeach node has to communicate with every neighbour.
If we increase n and k simultaneously, we essentially get the product of the slopesin the two plots.
123

Decentralized clustering algorithm 325
(a)
(b)
Fig. 17 Energy consumption, in terms of messages exchanged between nodes, for Watts-Strogatz graphswith a generation parameter n = 5, 10, . . . , 500; b generation parameter k = 2, 4, . . . , 50
123

326 S. Ó. Buadhacháin, G. Provan
10 Conclusion an further work
This article has proposed a novel algorithm for multi-mean aggregation in WSNs,named VarClust. Under assumptions of fixed-topology networks with complete orreal-world topologies and measurement noise, we have empirically demonstrated thatVarClust is at least as accurate as affinity propagation, and is substantially moreenergy-efficient. VarClust is a promising approach for a range of different real-world applications where multiple-mean aggregation is important, such as monitoringof natural (environmental) or human-occupied areas, and military surveillance.
In restricting ourselves to certain types of network graphs and assuming certainproperties of networks, sensors, and phenomena, we exclude several characteristicsof real-world WSNs in our evaluation. However, we can relax many of these assump-tions so that VarClust should handle many of these characteristics. Such relaxationsinclude:
– Dynamic networks: Gossip-based algorithms such as VarClust are inherentlywell-equipped to deal with dynamicity in networks, including churn during gossipcycles (Jelasity et al. 2005).
– Fault Tolerance: The use of an inferred similarity threshold makes VarClustwell-suited to fault-tolerant applications and calibration tasks, since this approachshould recognize and isolate outlying measurements induced by faults.
In further work, we intend to address the impact of high levels of noise on Var-Clust’s performance. We expect that the identification of edges bridging otherwisestrongly-connected clusters is a tractable network analysis problem.
References
Akyildiz, I., Su, W., Sankarasubramaniam, Y., Cayirci, E.: A survey on sensor networks. IEEE Commun.Mag. 40(8), 102–114 (2002)
Balzano, L., Nowak, R.: Blind calibration of sensor networks. In Proceedings of the 6th InternationalConference on Information Processing in Sensor Networks, pp. 79–88 (2007).
Barrenetxea, G., Ingelrest, F., Schaefer, G., Vetterli, M., Couach, O., Parlange, M.: SensorScope: Out-of-the-box environmental monitoring. In Proceedings of the 2008 International Conference on InformationProcessing in Sensor Networks, pp. 332–343 (2008).
Boyinbode, O., Le, H., Takizawa, M.: A survey on clustering algorithms for wireless sensor networks. Int.J. Space-Based Situat. Comput. 1(2), 130–136 (2011)
Bychkovskiy, V., Megerian, S., Estrin, D., and Potkonjak, M.: A collaborative approach to in-place sensorcalibration. In Proceedings 2nd International Conference on Information Processing in Sensor Networks,pp. 301–316 (2003).
Chen, J.-Y., Pandurangan, G., Xu, D.: Robust computation of aggregates in wireless sensor networks:distributed randomized algorithms and analysis. IEEE Trans. Parallel Distrib. Syst. 17(9), 987–1000(2006)
Chen, Z., Kuehne, A., Klein, A.: Reducing aggregation bias and time in gossiping-based wireless sensornetworks. In Proceedings of the 2013 IEEE 14th Workshop on Signal Processing Advances in WirelessCommunications (SPAWC), pp. 165–169 (2013). IEEE
Dimakis, A. G., Sarwate, A. D., Wainwright, M.J.: Geographic gossip: efficient aggregation for sensornetworks. In Proceedings of the 5th International Conference on Information Processing in SensorNetworks, pp. 69–76 (2006). ACM.
ElGammal, M., ElToweissy, M.: Distributed Context-Aware Affinity Propagation Clustering in WirelessSensor Networks. In Proceedings of the 2010 6th International Conference on Collaborative Computing:Networking, Applications and Worksharing (CollaborateCom), pp. 1–7 (2010).
123

Decentralized clustering algorithm 327
Elson, J., Estrin, D.: Time synchronization for wireless sensor networks. In Proceedings of the 15th Inter-national Parallel and Distributed Processing Symposium, pp. 1965–1970 (2001).
Erdos, P., Rényi, A.: On the evolution of random graphs. Magyar Tud. Akad. Mat. Kutató Int. Kzl 5, 17–61(1960)
Eugster, P.T., Guerraoui, R., Kermarrec, A.M., Massoulie, L.: Epidemic information dissemination in dis-tributed systems. Computer 37(5), 60–67 (2004)
Frey, B.J., Dueck, D.: Clustering by passing messages between data points. Science 315(5814), 972–976(2007)
Givoni, I., Chung, C., Frey, B.: Hierarchical affinity propagation. In Proceedings of thr 27th Conference onUncertainty in Artificial Intelligence, Barcelona (2011).
Guidoni, D.L., Mini, R.A., Loureiro, A.A.: On the design of resilient heterogeneous wireless sensor networksbased on small world concepts. Comput. Netw. 54(8), 1266–1281 (2010)
Hagberg, A. A., Schult, D. A., Swart, P.J.: Exploring network structure, dynamics, and function usingNetworkX. In Proceedings of the 7th Python in Science Conference (SciPy 2008), pp. 11–15 (2008).
Hayashi, Y.: A review of recent studies of geographical scale-free networks. Info. Media Technol. 1(2), 9(2006)
Heinzelman, W. R., Chandrakasan, A., Balakrishnan, H.: Energy-efficient communication protocol forwireless microsensor networks. In Proceedings of the 33rd Hawaii International Conference on SystemSciences, vol. 8 (2000).
Helmy, A.: Small worlds in wireless networks. Commun. Lett. IEEE 7(10), 490–492 (2003)Jelasity, M., Montresor, A., Babaoglu, O.: Gossip-based aggregation in large dynamic networks. ACM
Trans. Comput. Syst. (TOCS) 23(3), 219–252 (2005)Katiyar, V., Chand, N., Soni, S.: Clustering algorithms for heterogeneous wireless sensor network: a survey.
Int. J. Appl. Eng. Res. Dindigul 1(2), 273–274 (2010)Kempe, D., Dobra, A., Gehrke, J.: Gossip-based computation of aggregate information. In Proceedings of
the 44th Annual IEEE Symposium on Foundations of Computer Science, pp. 482–491 (2007).Li, C., Ye, M., Chen, G.: An energy-efficient unequal clustering mechanism for wireless sensor networks.
IEEE Int. Conf. Mobile Adhoc Sensor Syst. Conf. 2005, 597–604 (2005)Mitra, R., Nandy, D.: A survey on clustering techniques for wireless sensor network. Int. J. Res. Comput.
Sci. 2(4), 51–57 (2012)Ó Buadhacháin, S., Provan, G.: A model-based control method for decentralized calibration of wireless
sensor networks. In Proceedings of the 2013 American Control Conference (2013).Provan, G., Buadhacháin, Ó., S.: Sensor calibration and diagnostics under parameter uncertainty: a smart
building application. In Proceedings of the SafeProcess, Mexico City, p. 2012 (2012). IEEE, MexicoQi, X., Ma, S., Zheng, G.: Topology evolution of wireless sensor networks based on adaptive free-scale
networks. J. Info. Comput. Sci. 8(3), 467–475 (2011)Rahimian, F., Payberah, A.H., Girdzijauskas, S., Jelasity, M., Haridi, S.: Ja-be-Ja : A Distributed Algorithm
for Balanced Graph Partitioning. Technical Report October, Swedish Institute of Computer Science(2012)
Ramakrishnan, N., Ertin, E., Moses, R.L.: Gossip-Based algorithm for joint signature estimation and nodecalibration in sensor networks. IEEE J. Sel. Topics Signal Process. 5(4), 665–673 (2011)
Ramanathan, N., Balzano, L., Burt, M., Estrin, D., Harmon, T., Harvey, C., Jay, J., Kohler, E., Rothenberg,S., Srivastava, M.: Rapid deployment with confidence: calibration and fault detection in environmentalsensor networks. Technical report, CENS, UCLA (2006)
Sharma, G., Mazumdar, R.: Hybrid sensor networks: a small world. In Proceedings of the 6th ACM Inter-national Symposium on Mobile ad hoc Networking and Computing, pp. 366–377 (2005). ACM
Shrivastava, N., Buragohain, C., Agrawal, D., Suri, S.: Medians and beyond: new aggregation techniquesfor sensor networks. In Proceedings of the 2nd international conference on Embedded networked sensorsystems, pp. 239–249 (2004). ACM
Sim, S.-H., Carbonell-Márquez, J.F., Spencer, B., Jo, H.: Decentralized random decrement technique forefficient data aggregation and system identification in wireless smart sensor networks. Probab. Eng.Mech. 26(1), 81–91 (2011)
Singh, S.K., Singh, M., Singh, D.: Energy efficient homogenous clustering algorithm for wireless sensornetworks. Int. J. Wireless Mobile Netw. (IJWMN) 2(3), 49–61 (2010)
Szewczyk, R., Polastre, J., Mainwaring, A., Culler, D.: Lessons from a sensor network expedition. InProceedings of the 1st European Workshop on Sensor Networks (2004).
123

328 S. Ó. Buadhacháin, G. Provan
Taylor, C., Rahimi, A., Bachrach, J., Shrobe, H., Grue, A.: Simultaneous localization, calibration, andtracking in an ad hoc sensor network. In Proceedings of the 5th International Conference on InformationProcessing in Sensor Networks, pp. 27–33 (2006).
Wang, C.-D., Lai, J.-H., Suen, C.Y., Zhu, J.-Y.: Multi-exemplar affinity propagation. IEEE Trans. PatternAnal. Mach. Intell. 35(9), 2223–2237 (2013)
Wang, L., Dang, J., Jin, Y., Jin, H.: Scale-free topology for large-scale wireless sensor networks. In: Internet,ICI 2007 3rd IEEE/IFIP International Conference in Central Asia on, pp. 1–5. (2007). IEEE
Watts, D.J., Strogatz, S.H.: Collective dynamics of ’small-world’ networks. Nature 393(6684), 440–2 (1998)Welch, G., Bishop, G.: SCAAT: Incremental tracking with incomplete information. In Proceedings of the
24th Annual Conference on Computer Graphics and Interactive Techniques, pp. 333–344. (1997).Whitehouse, K., Culler, D.: Calibration as parameter estimation in sensor networks. In Proceedings of the
1st ACM International Workshop on Wireless Sensor Networks and Applications, pp. 59–67 (2002).Willig, A.: Recent and emerging topics in wireless industrial communications: a selection. IEEE Trans. Ind.
Info. 4(2), 102–124 (2008)Willig, A., Matheus, K., Wolisz, A.: Wireless technology in industrial networks. Proc. IEEE 93(6), 1130–
1151 (2005)Ye, M., Li, C., Chen, G., Wu, J.: EECS: an energy efficient clustering scheme in wireless sensor net-
works. In: Proceedings of the 24th IEEE International Conference on Performance, Computing, andCommunications, IPCCC, vol. 17, pp. 535–540 (2005)
Zhang, X., Furtlehner, C., Germain, C., Sebag, M.: Data stream clustering with affinity propagation. IEEETrans. Knowl. Data Eng. 99, 1–14 (2013)
Zhang, X., Furtlehner, C., Sebag, M.: Distributed and Incremental Clustering Based on Weighted AffinityPropagation. In STAIRS, pp. 199–210. (2008).
123


![Energy Aware Load Balancing Clustering in Mobile Ad Hoc ... · PDF fileA mobile ad hoc network is a decentralized type of ... In LCC [12] the clustering ... communications overhead,](https://img.dokumen.tips/doc/110x75/5ab0dedd7f8b9aea528bad0f/energy-aware-load-balancing-clustering-in-mobile-ad-hoc-mobile-ad-hoc-network.jpg)


























